Nonlinear structural and vibration analysis of straddle monorail pantograph under random excitations
-
Wenjie Sun
 and
Xiaobin Tang
and
Xiaobin Tang

Abstract
The dynamic behavior of the straddle monorail pantograph system is significantly influenced by nonlinearities arising from its unique structural configuration and operational environment. This article presents a mathematical model that incorporates both nonlinear geometric and material properties of the pantograph. A finite element model is utilized to perform modal and static analyses, identifying stress concentrations and dynamic characteristics. To account for random vibration excitations, a nonlinear dynamic response framework is developed, considering vehicle-induced vibrations and network irregularities as stochastic excitation sources. The results demonstrate that these nonlinearities amplify specific resonances under random excitation, leading to increased stress and deformation at critical points. These findings provide a foundation for enhancing fault detection strategies and designing more robust pantographs, with nonlinear vibration monitoring proposed as an effective diagnostic tool. This study contributes to both theoretical understanding and practical improvements in ensuring the reliability and longevity of straddle monorail systems.
1 Introduction
The pantograph of a straddle monorail vehicle is a critical component responsible for stable energy transmission, ensuring the proper functioning of various systems. Unlike traditional railway or subway pantographs, the straddle monorail pantograph is mounted laterally on the bogie, resulting in unique structural and dynamic behaviors [1,2,3]. This distinct configuration introduces nonlinearities into the system’s dynamic response, including nonlinear stiffness, damping effects, and geometric constraints. Despite its importance, the operational lifespan of the pantograph in many real-world settings is often much shorter than its designed lifespan, leading to costly failures, service interruptions, and safety risks [4,5,6,7].
In recent years, research on straddle monorail pantographs has gradually increased, focusing primarily on nonlinear dynamics and random vibration analysis. However, most existing studies focus on high-speed rail and subway pantograph systems, with limited attention given to the unique nonlinear dynamic characteristics of straddle monorail pantographs. In particular, the coupling effects of geometric and elastic nonlinearities, as well as the impact of random vibrations on pantograph lifespan, have not been thoroughly explored. Therefore, this study aims to fill this research gap by developing a nonlinear mathematical model and conducting finite element analysis to investigate the dynamic behavior of straddle monorail pantographs under random excitations [8,9,10].
To address these challenges, this article investigates the nonlinear dynamic behavior of the straddle monorail pantograph under random vibration excitations. A mathematical model that integrates nonlinear geometric and material properties is developed, providing insights into the coupled vibrational modes. Finite element model (FEM) is employed to identify stress concentration points and examine how nonlinearities influence vibration modes and structural integrity under operational conditions. Random vibration analysis is performed using stochastic differential equations to model the pantograph’s response to excitation sources, such as vehicle body vibrations and contact network irregularities. The nonlinearities in the system significantly affect its resonance characteristics, leading to localized stress amplification. These effects are crucial for understanding failure mechanisms and developing robust monitoring and fault detection strategies.
This study aims to fill the gap in understanding the nonlinear dynamics of straddle monorail pantographs. By integrating nonlinear modeling, finite element analysis, and random vibration theory, the research provides a comprehensive framework for analyzing and improving the reliability of pantograph systems in urban transit. The findings are expected to inform the design of next-generation pantographs and establish advanced fault detection methodologies, leveraging nonlinear vibration signals as diagnostic tools.
2 Nonlinear mathematical model of a straddle monorail pantograph methodology
The straddle monorail pantograph consists of several key components, including the bottom plate, upper and lower frames, connecting rod, balance rod, and bow head assembly. Due to its installation location on the vehicle, its vibration primarily occurs in the lateral direction [11,12,13,14,15]. Based on this configuration, the pantograph is simplified into a two-dimensional rigid body dynamic system consisting of interconnected members, as shown in Figure 1.
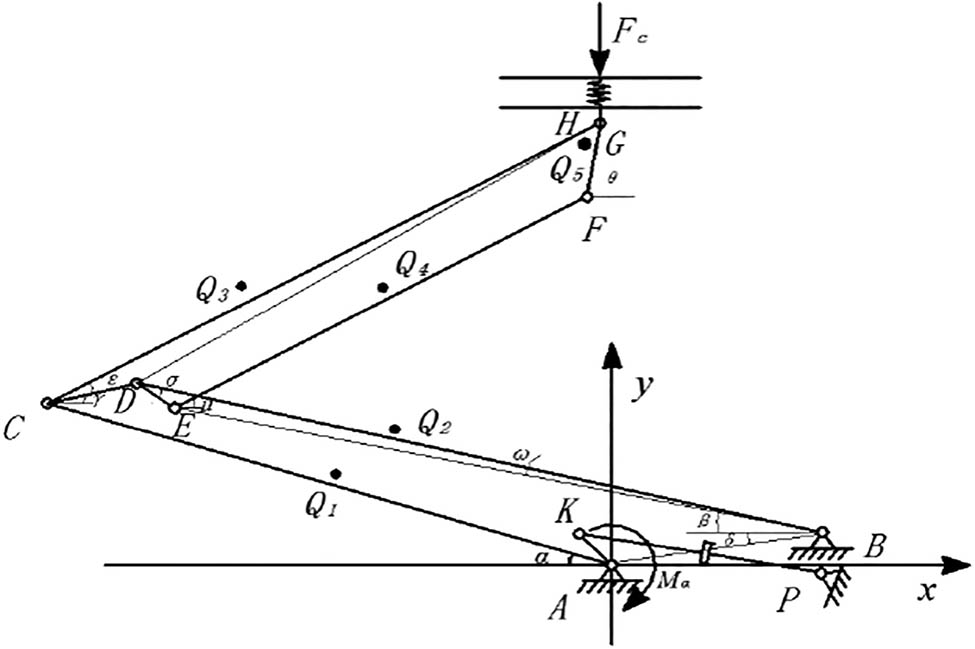
Simplified two-dimensional model of the straddle monorail pantograph.
Main components:
Lower frame: Simplified as rod AC.
Connecting rod: Represented by rod BDE.
Upper frame: Simplified as rod CDG.
Balance rod: Modeled as rod EF.
Bow head support: Represented as rod FGH.
Hinge points:
A, C: hinge points between the lower frame, bottom plate, and upper frame.
B, D, E: hinge points connecting the bottom plate, upper frame, and balance rod.
E, F, G, H: hinge points for the balance rod, upper frame, and bow head support.
Elastic element:
K, P: The two ends of the pantograph spring, connected to the lower frame and bottom plate, respectively.
α, β, γ, θ: Angles between rods AC, BD, CD, AB and the x-axis.
δ, ϕ: Angles between rods CD and DG, as well as FG and the x-axis.
The system is modeled in a two-dimensional plane, with motion constrained to the x–y plane. The gravity direction is assumed to align with the negative z-axis.
To simplify the derivation:
Point A is chosen as the origin of the coordinate system.
The vehicle’s running direction is along the positive x-axis, while the lateral vibration direction is along the positive y-axis.
The longitudinal displacement and rotational angles of the bow head are negligible, with the motion predominantly occurring in the y-direction.
The model incorporates nonlinearities arising from:
Geometric nonlinearities: due to the changing angles between rigid members during motion.
Elastic nonlinearities: from the spring and damping elements connected to the bow head.
Contact nonlinearities: at the interface between the bow head and the contact network.
The positions of the hinge points are determined by geometric constraints. For example:
The displacements of all hinge points are expressed in terms of the generalized coordinates
Nonlinear differential equation for the bow head: the bow head is subject to the following forces:
Elastic force:
Damping force:
Contact force:
Applying Newton’s second law in the y-direction:
Substituting the expressions for
This nonlinear equation describes the vertical motion of the bow head.
Nonlinear equations for the frame: the frame’s dynamics include translational motion in the x and y directions and rotational motion about its center of mass:
Translational motion:
Rotational motion:
where
Comprehensive nonlinear dynamic model
Combining the equations for the bow head and the frame, the system’s generalized equation of motion is as follows:
where
The nonlinear mathematical model reveals a close correlation between the vibration characteristics and structural condition of the pantograph. Key parameters, including natural frequencies, vibration amplitudes, modal shapes, and local stress/strain distribution, serve as critical indicators of structural damage. Natural frequencies are determined by the stiffness and mass of the system, and structural damage (e.g., stiffness degradation or loosened connections) results in a reduction of natural frequencies. Vibration amplitudes are influenced by nonlinear stiffness and damping properties, with structural damage amplifying vibrations at critical locations. Modal shapes exhibit significant changes in deformation at damaged regions, and abnormal increases in local stress or strain distribution directly indicate structural damage. By monitoring vibration data and analyzing the changes in these parameters, structural damage in the pantograph can be effectively identified and localized, providing theoretical support for optimizing structural design and improving operational reliability.
Through actual investigation, the structural damage of monorail vehicle pantograph is mainly concentrated on the upper and lower frames, as shown in Figures 2 and 3.

Fracture in the lower frame.
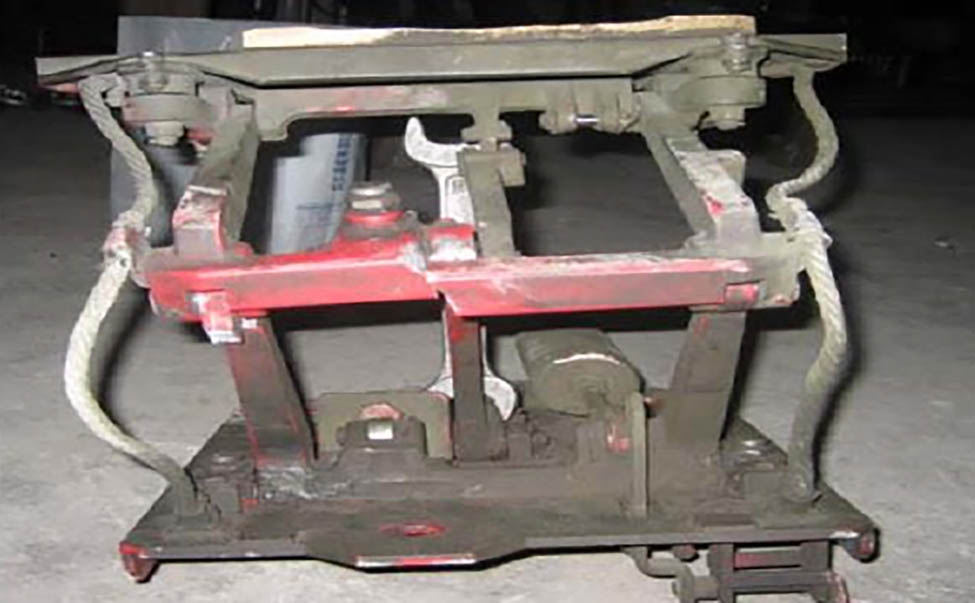
Fracture in the upper frame.
3 Finite element analysis of straddle monorail pantograph
A key condition to ensure reliable current collection for monorail vehicles is the consistent and effective contact between the pantograph and the contact line. During operation, the pantograph undergoes a total extension (in the upward direction) and compression (in the downward direction) ranging from 160 mm to 300 mm, with a standard operating height of 230 mm. At this height, the contact pressure of the pantograph is 59 N. To maintain effective current collection, the contact pressure must satisfy the following conditions:
In the elongation direction: the contact pressure should exceed 44 N.
In the compression direction: the contact pressure should remain below 78 N.
Excessive contact pressure increases abnormal wear on both the pantograph and the contact wire, significantly reducing their service life. Conversely, insufficient contact pressure leads to poor interaction between the pantograph and the contact line, resulting in intermittent power supply. This can further cause sparks or arcs, leading to localized burning of the contact wire.
Model simplifications and boundary conditions
The pantograph is composed of multiple interconnected rods, each connected at specific hinge points. However, during the stress analysis of different working positions, the degrees of rotational freedom between these rods are ignored, assuming rigid connections at a specific position. As a result, the pantograph can be simplified for analysis as a system of individual components with fixed geometric constraints.
To accurately simulate the stress distribution in the pantograph:
Boundary conditions: a fixed constraint is applied to the bottom surface of the base plate, representing its attachment to the monorail vehicle.
Load conditions: the contact force and operational constraints are applied as shown in Figure 4. This includes the upward and downward forces resulting from the pantograph’s interaction with the contact wire and the elastic forces within the system.
The simplified model and boundary conditions for the finite element analysis are illustrated in Figure 4, where the fixed constraint and load distribution represent the real-world operational conditions.
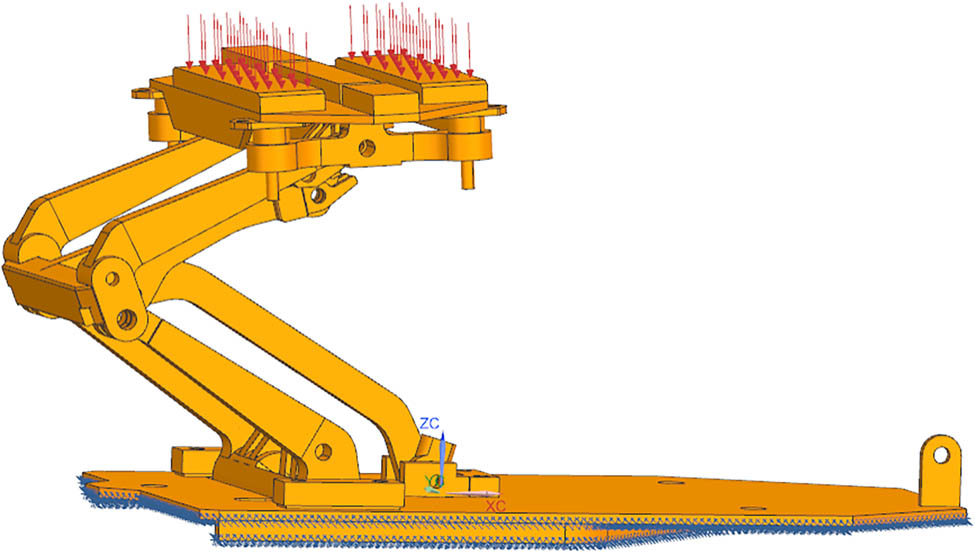
Load and constraint condition of pantograph.
3.1 Modal analysis of straddle-type monorail pantograph
Modal analysis is an essential tool for investigating the dynamic characteristics of a system, and it can be classified into theoretical modal analysis and experimental modal analysis based on the research approach. Theoretical modal analysis, also referred to as the analytical process, establishes the relationship between external excitations, the system’s dynamic behavior, and its response, based on linear vibration theory. It integrates vibration theory, dynamic testing, digital signal processing, and parameter identification for systematic recognition of the system’s modal parameters. Experimental modal analysis, on the other hand, involves physical testing to determine modal parameters. While valuable for verifying and comparing theoretical models, it is time-consuming, labor-intensive, and costly, making it unsuitable for early-stage product design and development. Thus, experimental modal analysis is typically used for post-design validation.
This study employs a theoretical modal analysis approach to evaluate the dynamic characteristics of the straddle-type monorail pantograph. The analysis leverages vibration theory and focuses on extracting critical modal parameters. A FEM of the pantograph is used as the foundation, with loads applied according to the international electrotechnical commission (IEC) 61373-2010 standard. The modal analysis is conducted under the standard operating height of H = 230 mm, representing the normal working position of the pantograph. The structural parameters of each pantograph component are listed in Table 1, which ensures that the model comprehensively reflects the real-world dynamic behavior of the system.
Parameters of pantograph
| Part | Material | Mass (kg) |
|---|---|---|
| Bowhead | Aluminum alloy | 0.519 |
| Copper slider | Copper alloy | 0.831 |
| Archehead seat | Aluminum alloy | 1.68 |
| Upper frame | Aluminum alloy | 0.732 |
| Stabilizer bar | Aluminum alloy | 0.087 |
| Lower frame | Aluminum alloy | 0.151 |
| Stabilizer bar | Aluminum alloy | 0.237 |
In this analysis, the first six modes corresponding to rigid body motion are excluded due to their negligible contribution to structural deformation. Instead, the analysis focuses on the 7th to 12th modes, which provide critical insights into the system’s structural dynamics. The results of the modal analysis, including natural frequencies and mode shapes, are presented in Table 2 and illustrated in Figure 5. These results highlight key structural vibration modes, including the deformation characteristics of the upper and lower frames, connecting rods, and bow head. This information is crucial for identifying potential resonance risks and stress concentration areas in the pantograph.
FEM analysis results of pantograph
| Modal order | Displacement Max (mm) | Stress Max (MPa) |
|---|---|---|
| Mode 7 | 1.213 | 213.99 |
| Mode 8 | 1.425 | 277.04 |
| Mode 9 | 2.300 | 267.24 |
| Mode 10 | 1.260 | 234.69 |
| Mode 11 | 1.728 | 281.60 |
| Mode 12 | 1.910 | 406.09 |
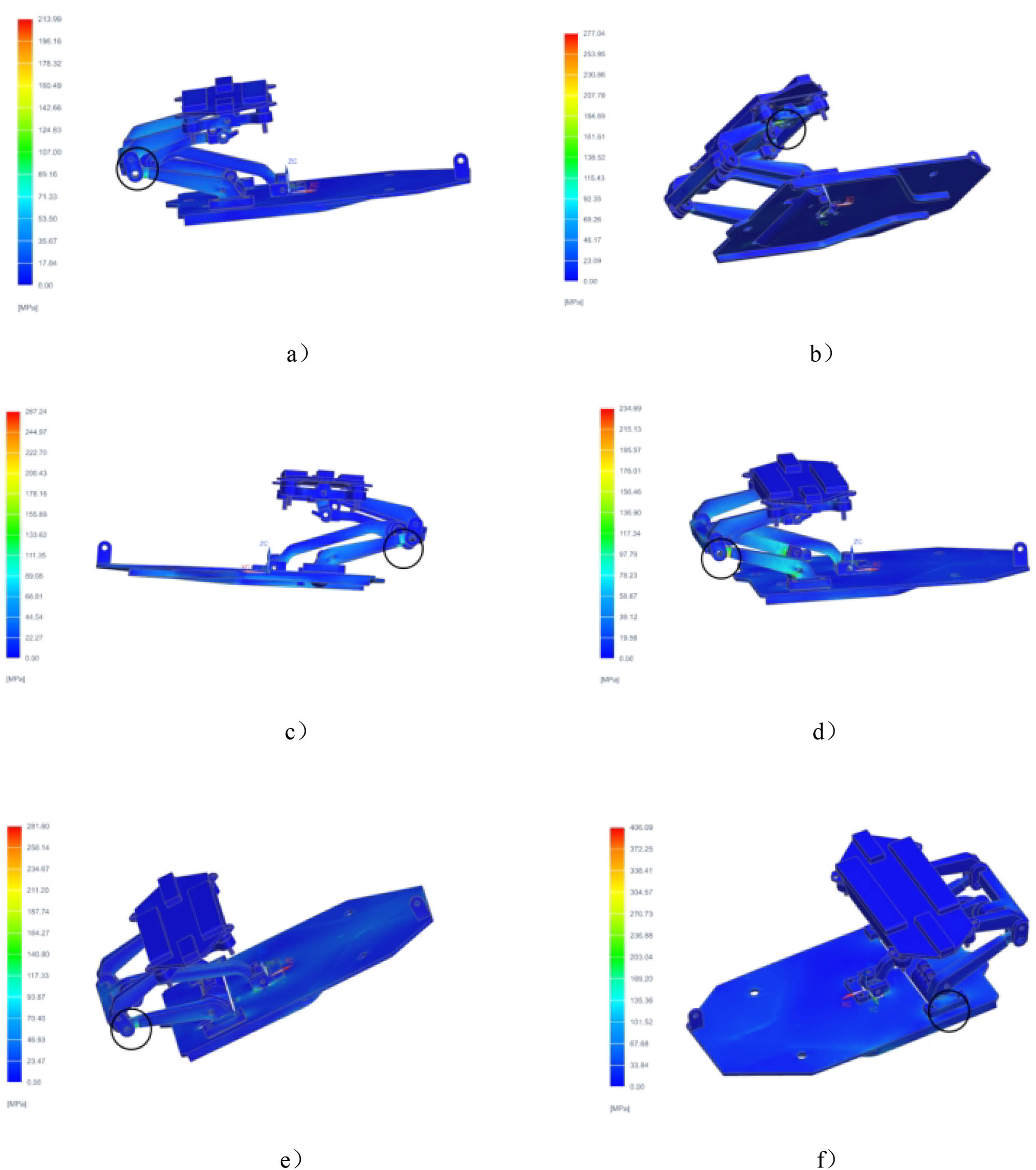
Distribution of maximum values of 7th–12th-order vibration-equivalent stress of pantograph: (a) 7th-order vibration mode, (b) 8th-order vibration mode, (c) 9th-order vibration mode, (d) 10th-order vibration mode, (e) 11th-order vibration mode, and (f) 12th-order vibration mode.
The modal analysis reveals that the dynamic performance of the pantograph is heavily influenced by the natural frequencies of its key modes. Areas of significant deformation correspond to regions of high dynamic stress, particularly in the upper and lower frame connections and hinge points. Such insights provide valuable guidance for optimizing the pantograph’s structural design, particularly in mitigating resonance and enhancing fatigue resistance. The findings further emphasize the importance of balancing stiffness and mass distribution across the pantograph to avoid critical frequencies that may lead to excessive vibration or structural failure under operational conditions.
The structural vibration modes reveal the inherent vibration characteristics of the pantograph. Analyzing the 7th- to 12th-order modes, the maximum equivalent stress values and their corresponding locations were identified as follows:
7th mode: maximum equivalent stress is 213.99 MPa, located at the connection between the lower frame and the upper frame.
8th mode: maximum equivalent stress is 277.04 MPa, occurring at the connection between the upper frame and the pantograph head.
9th mode: maximum equivalent stress is 267.24 MPa, concentrated at the connection between the lower frame and the upper frame.
10th mode: maximum equivalent stress is 234.69 MPa, again occurring at the connection between the lower frame and the upper frame.
11th mode: maximum equivalent stress is 281.60 MPa, located at the connection between the lower frame and the upper frame.
12th mode: maximum equivalent stress is 406.09 MPa, concentrated at the connection between the bottom plate and the lower frame.
In summary, the connections between the lower frame, the upper frame, and the bottom plate are the weaker points in the pantograph structure. Across the 7th–12th modes, the maximum equivalent stress ranges from 213.99 to 406.09 MPa. In some cases, the stress values approach or exceed the material’s strength limit, increasing the risk of structural failure.
3.2 Static analysis of straddle-type monorail pantograph
The structure and contact force of the straddle-type monorail pantograph vary across different working positions. A static analysis was performed to evaluate the force conditions of the pantograph at three critical positions: the highest working position (H = 300 mm), the normal working position (H = 230 mm), and the lowest working position (H = 160 mm). The structural characteristics of the pantograph at these working heights are summarized in Table 3, and the results of the static analysis are presented in Figure 6.
Structural characteristics of pantograph at different working heights
| Height | H300 mm | H230 mm | H160 mm |
|---|---|---|---|
| Angle between the upper frame and the bow head | 43.600 | 29.600 | 14.000 |
| Angle between the lower frame and the bottom plate | 49.300 | 39.960 | 24.130 |
| Angle between the connecting rod and the base plate | 38.240 | 28.340 | 17.060 |
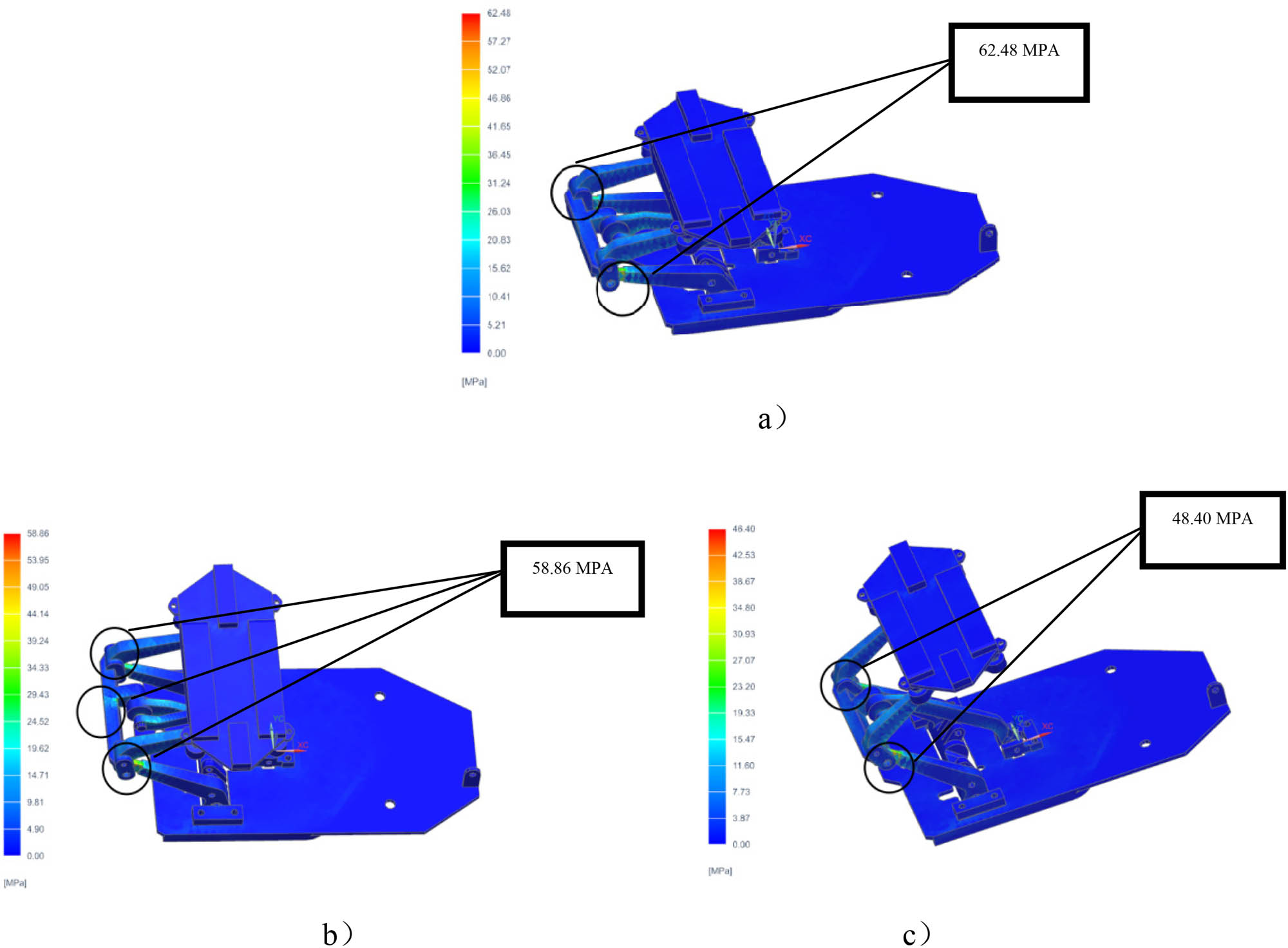
Equivalent stress diagram of pantograph at three positions: (a) H160 mm working position, (b) H230 mm working position, and (c) H300 mm working position.
Based on the aforementioned analysis, the maximum equivalent stress of the pantograph is primarily concentrated at the connection between the lower frame and the upper frame, as well as at the eccentric region near the bearing frame of the upper frame. This region is critical as it connects the upper frame, the stabilizer bar, and associated components, resulting in a structurally complex and highly stressed area. Consequently, it is more prone to damage compared to other locations.
4 Random vibration analysis of straddle-type monorail pantograph
The straddle-type monorail pantograph is an elastic vibration system installed at the lower part of both sides of the vehicle body. During vehicle operation, it is subjected to various excitation forces and disturbances. These excitation sources can be categorized into two main types: vibrations originating from the vehicle body and those arising from the contact network.
The first category, vibration sources from the vehicle body, includes:
Vibration from the vehicle power system;
Vibrations caused by the track structure;
Irregularities between wheels and tracks, with wheel-rail irregularity being the primary cause of wheel-rail vibrations.
The second category of vibrations originates from the contact network. Over prolonged operation, accumulated deformation in the contact network results in uneven contact surfaces, which induce harmful vibrations between the pantograph and the rigid catenary. These vibrations not only degrade the current collection quality but also pose serious risks to the safe operation of urban rail transit, potentially leading to pantograph fractures. The irregularity of the contact surface is inherently a stochastic process. When viewed as part of an infinite rigid catenary system, it can be treated as a stationary stochastic process, representing a source of random excitation for the pantograph–catenary system.
If the frequency of these excitations coincides with one of the pantograph’s natural frequencies, resonance will occur, generating large resonant dynamic loads at certain locations within the pantograph structure. This phenomenon results in high equivalent stress, shear stress, and deformation, increasing the risk of structural damage to the pantograph. The uncertain, time-varying nature of these loads is referred to as random loads. The motion of a multi-degree-of-freedom system under stationary random external forces can be described by the following equation:
where M is the mass matrix of the system, C is the damping matrix, K is the stiffness matrix,
Unlike deterministic vibrations, random vibrations follow probabilistic statistical laws and must be analyzed using statistical methods. The stochastic nature of the system necessitates consideration of statistical distributions for responses such as stress and deformation.
The IEC 61373-2010 standard provides guidance for vibration analysis by classifying equipment based on its installation location (vehicle body, bogie, or axle). Since the straddle-type monorail pantograph is installed on the bogie, the corresponding load conditions must be applied for vibration analysis. According to the standard, the random load values for the pantograph are provided in Table 4.
Summary of root mean square acceleration levels
| Category | Maximum horizontal root mean square (m/s2) | Mean square root of average level (m/s2) |
|---|---|---|
| Vertical | 7.0 | 3.1 |
| Transverse | 7.0 | 3.0 |
| Direction | 4.1 | 1.2 |
To evaluate the behavior of the pantograph under random vibration, the following conditions were simulated:
Normal condition: the pantograph is in the H230 mm standard operating position, with all components intact.
Simulated fault condition: the pantograph is in the H230 mm standard operating position, but with a modeled fracture at locations identified as prone to failure in the prior structural analysis.
Simulation results under these two conditions are presented in Figure 7. The analysis demonstrates that under normal conditions, the stress and deformation are well distributed and remain within safe operational limits. However, in the simulated fault condition, significant stress concentrations and large deformations were observed near the fracture-prone regions. These results confirm that random vibrations, particularly under fault conditions, exacerbate the risk of failure in structurally weak areas, such as the connections between the lower frame, upper frame, and bottom plate.
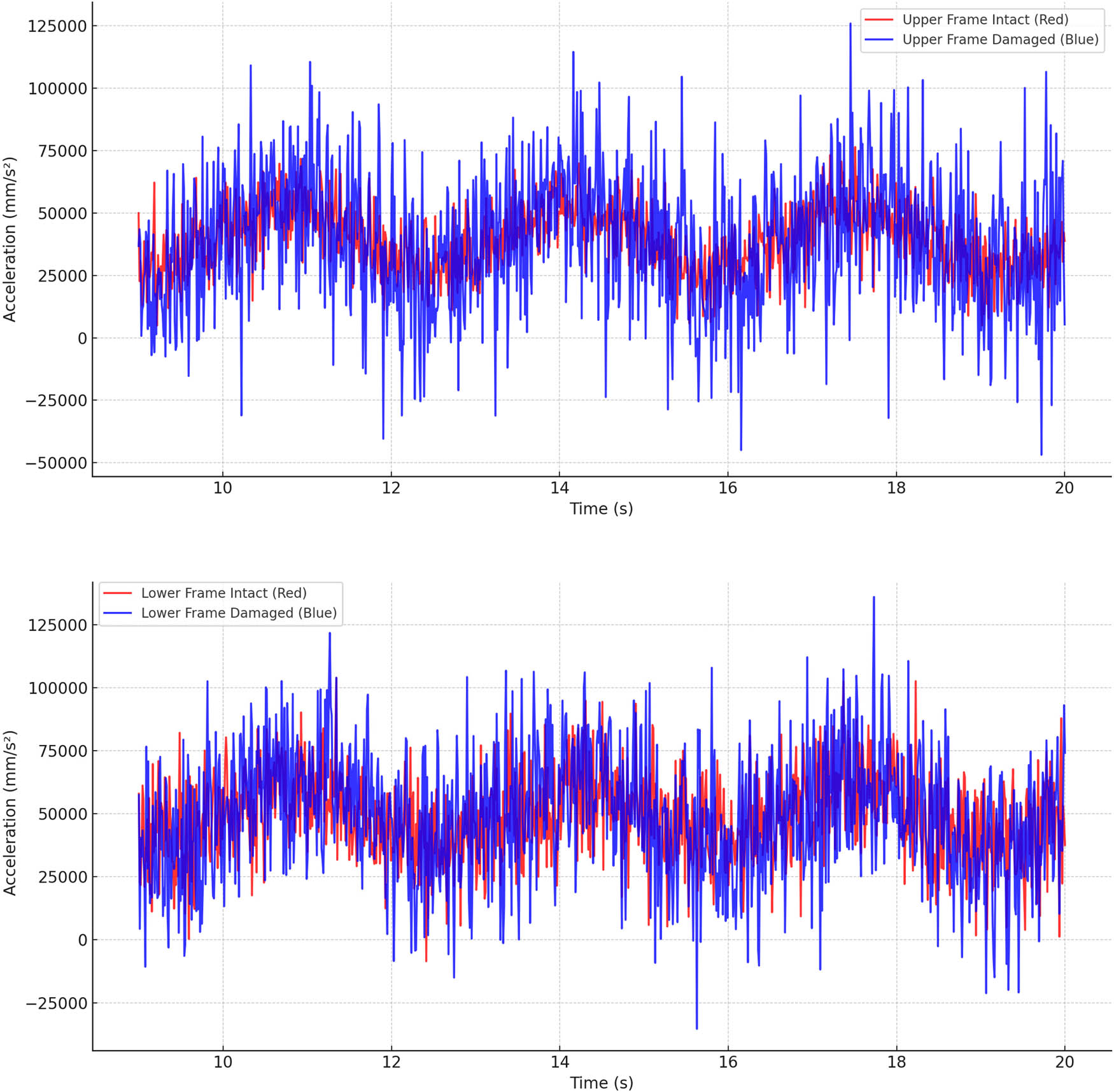
Acceleration chart of pantograph: (a) acceleration chart of cracks generated in weak links of upper frame of pantograph under normal state and simulation and (b) acceleration chart of cracks in weak links of lower frame of pantograph under normal state and simulation.
In the normal state, the red line represents the acceleration signals of the upper and lower frames in an intact condition, with smaller and more uniform fluctuations, reflecting the structural stability. In the damaged state, however, the blue line shows significantly increased and more irregular fluctuations in the acceleration signals of the upper and lower frames, indicating dynamic instability caused by structural damage. A clear comparison reveals that the acceleration signals exhibit significant changes in the damaged state, including higher amplitudes and more chaotic fluctuation patterns. This result validates the reliability and effectiveness of using vibration signal analysis to detect structural damage in the pantograph.
5 Conclusion and outlook
This study develops a comprehensive mathematical model for the straddle-type monorail pantograph, offering a detailed analysis of its dynamic and structural behaviors. The findings demonstrate that the horizontal and longitudinal vibrations of the pantograph are closely linked to its structural parameters, highlighting the significance of understanding the interaction between dynamic forces and structural characteristics. Using the FEM, a detailed FEM of the pantograph was established to conduct modal and static analyses. The results indicate that stress concentrations are primarily located at critical points such as the eccentric connection near the upper frame bearing and the junction between the lower and upper frames, which are particularly susceptible to damage under dynamic loads.
In addition, random vibration analysis was performed in accordance with the IEC 61373-2010 standard under two scenarios: normal operating conditions and simulated fault conditions. The results revealed significant differences in the vibration signals between the intact pantograph and the faulted pantograph under random vibration. These differences, particularly in the frequency shifts and amplitude amplifications at critical stress points, confirm that vibration signal monitoring is an effective method for fault detection in pantographs. By analyzing the vibration characteristics, potential faults can be identified early, providing a theoretical foundation for the development of advanced fault diagnosis techniques.
Looking ahead, this study provides valuable insights into the structural performance and dynamic characteristics of straddle-type monorail pantographs and underscores the importance of vibration-based monitoring as a diagnostic tool. Future research should focus on the following areas:
Experimental validation: conduct real-world experiments to verify the accuracy and reliability of the proposed theoretical and computational methods.
Advanced signal processing: apply advanced techniques such as machine learning and spectral analysis to improve the precision and efficiency of fault detection.
Robust monitoring systems: develop more durable, efficient, and scalable monitoring systems tailored to real-world urban rail transit conditions.
These advancements will contribute to enhancing the reliability, safety, and long-term performance of pantograph systems in urban monorail operations, supporting the increasing demands of modern transportation systems.
-
Funding information: This work has received partial funding from Young Project of Science and Technology Research Program of Chongqing Education Commission of China (No KJQN202303425) and Chongqing Education Science Planning Project, General Teaching Research Special Project, Research on Teaching Ability of Vocational School Teachers in the Context of Digitalization (No K24ZG3140350).
-
Author contributions: Conceptualization: S.W. and T.X.; methodology: S.W.; software: S.W. and T.X.; validation: S.W. and T.X.; formal analysis: S.W.; investigation: T.X.; resource: S.W. and T.X.; writing – original draft preparation: S.W.; and writing – review and editing: S.W. and T.X. Both authors have read and agreed to the published version of the manuscript.
-
Conflict of interest: The authors declared no potential conflicts of interest with respect to the research, authorship, and publication of this article.
-
Data availability statement: The datasets used and analyzed during the current study are available from the corresponding author on reasonable request.
References
[1] Song J, Zhang L, Zhu D, Liang H. Active control of shimmy in articulated single-axle straddle-type monorail train. Machines. 2024;12(12):854.10.3390/machines12120854Search in Google Scholar
[2] Ma Z, Guo Y. Crosswind impacts on comfort of straddle monorail vehicle running on flexible track beam. J Mech Sci Technol. 2024;38(2):569–77.10.1007/s12206-024-0106-0Search in Google Scholar
[3] Wen X, Nie Y, Du Z, Hang L. Operational safety assessment of straddle-type monorail vehicle system based on cloud model and improved CRITIC method. Eng Fail Anal. 2022;139:106463.10.1016/j.engfailanal.2022.106463Search in Google Scholar
[4] Wen X, Huang L, Du Z, Chen L, Yang Z. Research on parameter optimization based on multi-body dynamics model of monorail vehicle aiming at reducing running wheel wear. Proc Inst Mech Eng Part K J Multi-Body Dyn. 2022;236(4):588–601.10.1177/14644193221119331Search in Google Scholar
[5] Zhou J, Liu Y, Gao J, Liao Y, Du H. Shimmy analysis of straddle-type monorail vehicle with single-axle bogies based on factor model. Veh Syst Dyn. 2024;62(5):1063–84.10.1080/00423114.2023.2211694Search in Google Scholar
[6] Zou J, Chen B, Zhan S, Huang C, Wang X. Theoretical derivation of gauges for straddle-type monorail vehicle. J Phys Conf Ser. 2021;1910(1):012052.10.1088/1742-6596/1910/1/012052Search in Google Scholar
[7] Zhang H, Wang P, Li Q, Jin J, Wei S, Guo F, et al. An experimental and numerical study on the lateral stiffness limits of straddle-type monorail tour-transit systems. Buildings. 2024;14(10):3111.10.3390/buildings14103111Search in Google Scholar
[8] Guo F, Ji Y, Liao Q, Liu B, Li C, Wei S, et al. The limit of the lateral fundamental frequency and comfort analysis of a straddle-type monorail tour transit system. Appl Sci. 2022;12(20):10434.10.3390/app122010434Search in Google Scholar
[9] Tan Y, Liu R, Wang X, Zhao D, Zen Y. Image segmentation method for monorail pantograph carbon slider based on improved U-Net. Rail Transit Mater. 2024;3(4):63–7.Search in Google Scholar
[10] Li X, Wang J, Su A, Gao W, Wu R, Jia S, et al. Simulation analysis of high-speed train pantographs based on finite element method. Railw Locomot Cars. 2019;39(5):100–3, 130.Search in Google Scholar
[11] Liu C, Di K, Du Z, Yang Z. Research on active control of straddle-type monorail pantograph-contact network coupling. J Chongqing Jiaotong Univ Nat Sci Ed. 2021;40(2):129–35.Search in Google Scholar
[12] Zhou Z, Xiao S, He X, Jian Z, Cai C. Random vibration analysis of straddle-type monorail train-bridge system. J Railw Sci Eng. 2023;20(11):4210–20.Search in Google Scholar
[13] Chen L, Xiong J, Wang S. Study on the sliding mode variable structure semi-active control method for straddle-type monorail pantograph. J Mech Strength. 2023;45(5):1058–64.Search in Google Scholar
[14] Zhou X, Li F, Feng H, Luo J, Li Z. Analysis of the effect of bridge span on the coupled vibration of straddle-type monorail vehicle-bridge system. Noise Vib Control. 2024;44(4):1–7.Search in Google Scholar
[15] Zhang Y, Zhang J. Aerodynamic noise characteristics of pantograph position and the height of the air duct embedded in the vehicle body. J Railw Sci Eng. 2020;42(8):60–7.Search in Google Scholar
© 2025 the author(s), published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Research Articles
- Generalized (ψ,φ)-contraction to investigate Volterra integral inclusions and fractal fractional PDEs in super-metric space with numerical experiments
- Solitons in ultrasound imaging: Exploring applications and enhancements via the Westervelt equation
- Stochastic improved Simpson for solving nonlinear fractional-order systems using product integration rules
- Exploring dynamical features like bifurcation assessment, sensitivity visualization, and solitary wave solutions of the integrable Akbota equation
- Research on surface defect detection method and optimization of paper-plastic composite bag based on improved combined segmentation algorithm
- Impact the sulphur content in Iraqi crude oil on the mechanical properties and corrosion behaviour of carbon steel in various types of API 5L pipelines and ASTM 106 grade B
- Unravelling quiescent optical solitons: An exploration of the complex Ginzburg–Landau equation with nonlinear chromatic dispersion and self-phase modulation
- Perturbation-iteration approach for fractional-order logistic differential equations
- Variational formulations for the Euler and Navier–Stokes systems in fluid mechanics and related models
- Rotor response to unbalanced load and system performance considering variable bearing profile
- DeepFowl: Disease prediction from chicken excreta images using deep learning
- Channel flow of Ellis fluid due to cilia motion
- A case study of fractional-order varicella virus model to nonlinear dynamics strategy for control and prevalence
- Multi-point estimation weldment recognition and estimation of pose with data-driven robotics design
- Analysis of Hall current and nonuniform heating effects on magneto-convection between vertically aligned plates under the influence of electric and magnetic fields
- A comparative study on residual power series method and differential transform method through the time-fractional telegraph equation
- Insights from the nonlinear Schrödinger–Hirota equation with chromatic dispersion: Dynamics in fiber–optic communication
- Mathematical analysis of Jeffrey ferrofluid on stretching surface with the Darcy–Forchheimer model
- Exploring the interaction between lump, stripe and double-stripe, and periodic wave solutions of the Konopelchenko–Dubrovsky–Kaup–Kupershmidt system
- Computational investigation of tuberculosis and HIV/AIDS co-infection in fuzzy environment
- Signature verification by geometry and image processing
- Theoretical and numerical approach for quantifying sensitivity to system parameters of nonlinear systems
- Chaotic behaviors, stability, and solitary wave propagations of M-fractional LWE equation in magneto-electro-elastic circular rod
- Dynamic analysis and optimization of syphilis spread: Simulations, integrating treatment and public health interventions
- Visco-thermoelastic rectangular plate under uniform loading: A study of deflection
- Threshold dynamics and optimal control of an epidemiological smoking model
- Numerical computational model for an unsteady hybrid nanofluid flow in a porous medium past an MHD rotating sheet
- Regression prediction model of fabric brightness based on light and shadow reconstruction of layered images
- Dynamics and prevention of gemini virus infection in red chili crops studied with generalized fractional operator: Analysis and modeling
- Qualitative analysis on existence and stability of nonlinear fractional dynamic equations on time scales
- Fractional-order super-twisting sliding mode active disturbance rejection control for electro-hydraulic position servo systems
- Analytical exploration and parametric insights into optical solitons in magneto-optic waveguides: Advances in nonlinear dynamics for applied sciences
- Bifurcation dynamics and optical soliton structures in the nonlinear Schrödinger–Bopp–Podolsky system
- User profiling in university libraries by combining multi-perspective clustering algorithm and reader behavior analysis
- Review Article
- Haar wavelet collocation method for existence and numerical solutions of fourth-order integro-differential equations with bounded coefficients
- Special Issue: Nonlinear Analysis and Design of Communication Networks for IoT Applications - Part II
- Silicon-based all-optical wavelength converter for on-chip optical interconnection
- Research on a path-tracking control system of unmanned rollers based on an optimization algorithm and real-time feedback
- Analysis of the sports action recognition model based on the LSTM recurrent neural network
- Industrial robot trajectory error compensation based on enhanced transfer convolutional neural networks
- Research on IoT network performance prediction model of power grid warehouse based on nonlinear GA-BP neural network
- Interactive recommendation of social network communication between cities based on GNN and user preferences
- Application of improved P-BEM in time varying channel prediction in 5G high-speed mobile communication system
- Construction of a BIM smart building collaborative design model combining the Internet of Things
- Optimizing malicious website prediction: An advanced XGBoost-based machine learning model
- Economic operation analysis of the power grid combining communication network and distributed optimization algorithm
- Sports video temporal action detection technology based on an improved MSST algorithm
- Internet of things data security and privacy protection based on improved federated learning
- Enterprise power emission reduction technology based on the LSTM–SVM model
- Construction of multi-style face models based on artistic image generation algorithms
- Research and application of interactive digital twin monitoring system for photovoltaic power station based on global perception
- Special Issue: Decision and Control in Nonlinear Systems - Part II
- Animation video frame prediction based on ConvGRU fine-grained synthesis flow
- Application of GGNN inference propagation model for martial art intensity evaluation
- Benefit evaluation of building energy-saving renovation projects based on BWM weighting method
- Deep neural network application in real-time economic dispatch and frequency control of microgrids
- Real-time force/position control of soft growing robots: A data-driven model predictive approach
- Mechanical product design and manufacturing system based on CNN and server optimization algorithm
- Application of finite element analysis in the formal analysis of ancient architectural plaque section
- Research on territorial spatial planning based on data mining and geographic information visualization
- Fault diagnosis of agricultural sprinkler irrigation machinery equipment based on machine vision
- Closure technology of large span steel truss arch bridge with temporarily fixed edge supports
- Intelligent accounting question-answering robot based on a large language model and knowledge graph
- Analysis of manufacturing and retailer blockchain decision based on resource recyclability
- Flexible manufacturing workshop mechanical processing and product scheduling algorithm based on MES
- Exploration of indoor environment perception and design model based on virtual reality technology
- Tennis automatic ball-picking robot based on image object detection and positioning technology
- A new CNN deep learning model for computer-intelligent color matching
- Design of AR-based general computer technology experiment demonstration platform
- Indoor environment monitoring method based on the fusion of audio recognition and video patrol features
- Health condition prediction method of the computer numerical control machine tool parts by ensembling digital twins and improved LSTM networks
- Establishment of a green degree evaluation model for wall materials based on lifecycle
- Quantitative evaluation of college music teaching pronunciation based on nonlinear feature extraction
- Multi-index nonlinear robust virtual synchronous generator control method for microgrid inverters
- Manufacturing engineering production line scheduling management technology integrating availability constraints and heuristic rules
- Analysis of digital intelligent financial audit system based on improved BiLSTM neural network
- Attention community discovery model applied to complex network information analysis
- A neural collaborative filtering recommendation algorithm based on attention mechanism and contrastive learning
- Rehabilitation training method for motor dysfunction based on video stream matching
- Research on façade design for cold-region buildings based on artificial neural networks and parametric modeling techniques
- Intelligent implementation of muscle strain identification algorithm in Mi health exercise induced waist muscle strain
- Optimization design of urban rainwater and flood drainage system based on SWMM
- Improved GA for construction progress and cost management in construction projects
- Evaluation and prediction of SVM parameters in engineering cost based on random forest hybrid optimization
- Museum intelligent warning system based on wireless data module
- Optimization design and research of mechatronics based on torque motor control algorithm
- Special Issue: Nonlinear Engineering’s significance in Materials Science
- Experimental research on the degradation of chemical industrial wastewater by combined hydrodynamic cavitation based on nonlinear dynamic model
- Study on low-cycle fatigue life of nickel-based superalloy GH4586 at various temperatures
- Some results of solutions to neutral stochastic functional operator-differential equations
- Ultrasonic cavitation did not occur in high-pressure CO2 liquid
- Research on the performance of a novel type of cemented filler material for coal mine opening and filling
- Testing of recycled fine aggregate concrete’s mechanical properties using recycled fine aggregate concrete and research on technology for highway construction
- A modified fuzzy TOPSIS approach for the condition assessment of existing bridges
- Nonlinear structural and vibration analysis of straddle monorail pantograph under random excitations
- Achieving high efficiency and stability in blue OLEDs: Role of wide-gap hosts and emitter interactions
- Construction of teaching quality evaluation model of online dance teaching course based on improved PSO-BPNN
- Enhanced electrical conductivity and electromagnetic shielding properties of multi-component polymer/graphite nanocomposites prepared by solid-state shear milling
- Optimization of thermal characteristics of buried composite phase-change energy storage walls based on nonlinear engineering methods
- A higher-performance big data-based movie recommendation system
- Nonlinear impact of minimum wage on labor employment in China
- Nonlinear comprehensive evaluation method based on information entropy and discrimination optimization
- Application of numerical calculation methods in stability analysis of pile foundation under complex foundation conditions
- Research on the contribution of shale gas development and utilization in Sichuan Province to carbon peak based on the PSA process
- Characteristics of tight oil reservoirs and their impact on seepage flow from a nonlinear engineering perspective
- Nonlinear deformation decomposition and mode identification of plane structures via orthogonal theory
- Numerical simulation of damage mechanism in rock with cracks impacted by self-excited pulsed jet based on SPH-FEM coupling method: The perspective of nonlinear engineering and materials science
- Cross-scale modeling and collaborative optimization of ethanol-catalyzed coupling to produce C4 olefins: Nonlinear modeling and collaborative optimization strategies
- Unequal width T-node stress concentration factor analysis of stiffened rectangular steel pipe concrete
- Special Issue: Advances in Nonlinear Dynamics and Control
- Development of a cognitive blood glucose–insulin control strategy design for a nonlinear diabetic patient model
- Big data-based optimized model of building design in the context of rural revitalization
- Multi-UAV assisted air-to-ground data collection for ground sensors with unknown positions
- Design of urban and rural elderly care public areas integrating person-environment fit theory
- Application of lossless signal transmission technology in piano timbre recognition
- Application of improved GA in optimizing rural tourism routes
- Architectural animation generation system based on AL-GAN algorithm
- Advanced sentiment analysis in online shopping: Implementing LSTM models analyzing E-commerce user sentiments
- Intelligent recommendation algorithm for piano tracks based on the CNN model
- Visualization of large-scale user association feature data based on a nonlinear dimensionality reduction method
- Low-carbon economic optimization of microgrid clusters based on an energy interaction operation strategy
- Optimization effect of video data extraction and search based on Faster-RCNN hybrid model on intelligent information systems
- Construction of image segmentation system combining TC and swarm intelligence algorithm
- Particle swarm optimization and fuzzy C-means clustering algorithm for the adhesive layer defect detection
- Optimization of student learning status by instructional intervention decision-making techniques incorporating reinforcement learning
- Fuzzy model-based stabilization control and state estimation of nonlinear systems
- Optimization of distribution network scheduling based on BA and photovoltaic uncertainty
- Tai Chi movement segmentation and recognition on the grounds of multi-sensor data fusion and the DBSCAN algorithm
- Special Issue: Dynamic Engineering and Control Methods for the Nonlinear Systems - Part III
- Generalized numerical RKM method for solving sixth-order fractional partial differential equations
Articles in the same Issue
- Research Articles
- Generalized (ψ,φ)-contraction to investigate Volterra integral inclusions and fractal fractional PDEs in super-metric space with numerical experiments
- Solitons in ultrasound imaging: Exploring applications and enhancements via the Westervelt equation
- Stochastic improved Simpson for solving nonlinear fractional-order systems using product integration rules
- Exploring dynamical features like bifurcation assessment, sensitivity visualization, and solitary wave solutions of the integrable Akbota equation
- Research on surface defect detection method and optimization of paper-plastic composite bag based on improved combined segmentation algorithm
- Impact the sulphur content in Iraqi crude oil on the mechanical properties and corrosion behaviour of carbon steel in various types of API 5L pipelines and ASTM 106 grade B
- Unravelling quiescent optical solitons: An exploration of the complex Ginzburg–Landau equation with nonlinear chromatic dispersion and self-phase modulation
- Perturbation-iteration approach for fractional-order logistic differential equations
- Variational formulations for the Euler and Navier–Stokes systems in fluid mechanics and related models
- Rotor response to unbalanced load and system performance considering variable bearing profile
- DeepFowl: Disease prediction from chicken excreta images using deep learning
- Channel flow of Ellis fluid due to cilia motion
- A case study of fractional-order varicella virus model to nonlinear dynamics strategy for control and prevalence
- Multi-point estimation weldment recognition and estimation of pose with data-driven robotics design
- Analysis of Hall current and nonuniform heating effects on magneto-convection between vertically aligned plates under the influence of electric and magnetic fields
- A comparative study on residual power series method and differential transform method through the time-fractional telegraph equation
- Insights from the nonlinear Schrödinger–Hirota equation with chromatic dispersion: Dynamics in fiber–optic communication
- Mathematical analysis of Jeffrey ferrofluid on stretching surface with the Darcy–Forchheimer model
- Exploring the interaction between lump, stripe and double-stripe, and periodic wave solutions of the Konopelchenko–Dubrovsky–Kaup–Kupershmidt system
- Computational investigation of tuberculosis and HIV/AIDS co-infection in fuzzy environment
- Signature verification by geometry and image processing
- Theoretical and numerical approach for quantifying sensitivity to system parameters of nonlinear systems
- Chaotic behaviors, stability, and solitary wave propagations of M-fractional LWE equation in magneto-electro-elastic circular rod
- Dynamic analysis and optimization of syphilis spread: Simulations, integrating treatment and public health interventions
- Visco-thermoelastic rectangular plate under uniform loading: A study of deflection
- Threshold dynamics and optimal control of an epidemiological smoking model
- Numerical computational model for an unsteady hybrid nanofluid flow in a porous medium past an MHD rotating sheet
- Regression prediction model of fabric brightness based on light and shadow reconstruction of layered images
- Dynamics and prevention of gemini virus infection in red chili crops studied with generalized fractional operator: Analysis and modeling
- Qualitative analysis on existence and stability of nonlinear fractional dynamic equations on time scales
- Fractional-order super-twisting sliding mode active disturbance rejection control for electro-hydraulic position servo systems
- Analytical exploration and parametric insights into optical solitons in magneto-optic waveguides: Advances in nonlinear dynamics for applied sciences
- Bifurcation dynamics and optical soliton structures in the nonlinear Schrödinger–Bopp–Podolsky system
- User profiling in university libraries by combining multi-perspective clustering algorithm and reader behavior analysis
- Review Article
- Haar wavelet collocation method for existence and numerical solutions of fourth-order integro-differential equations with bounded coefficients
- Special Issue: Nonlinear Analysis and Design of Communication Networks for IoT Applications - Part II
- Silicon-based all-optical wavelength converter for on-chip optical interconnection
- Research on a path-tracking control system of unmanned rollers based on an optimization algorithm and real-time feedback
- Analysis of the sports action recognition model based on the LSTM recurrent neural network
- Industrial robot trajectory error compensation based on enhanced transfer convolutional neural networks
- Research on IoT network performance prediction model of power grid warehouse based on nonlinear GA-BP neural network
- Interactive recommendation of social network communication between cities based on GNN and user preferences
- Application of improved P-BEM in time varying channel prediction in 5G high-speed mobile communication system
- Construction of a BIM smart building collaborative design model combining the Internet of Things
- Optimizing malicious website prediction: An advanced XGBoost-based machine learning model
- Economic operation analysis of the power grid combining communication network and distributed optimization algorithm
- Sports video temporal action detection technology based on an improved MSST algorithm
- Internet of things data security and privacy protection based on improved federated learning
- Enterprise power emission reduction technology based on the LSTM–SVM model
- Construction of multi-style face models based on artistic image generation algorithms
- Research and application of interactive digital twin monitoring system for photovoltaic power station based on global perception
- Special Issue: Decision and Control in Nonlinear Systems - Part II
- Animation video frame prediction based on ConvGRU fine-grained synthesis flow
- Application of GGNN inference propagation model for martial art intensity evaluation
- Benefit evaluation of building energy-saving renovation projects based on BWM weighting method
- Deep neural network application in real-time economic dispatch and frequency control of microgrids
- Real-time force/position control of soft growing robots: A data-driven model predictive approach
- Mechanical product design and manufacturing system based on CNN and server optimization algorithm
- Application of finite element analysis in the formal analysis of ancient architectural plaque section
- Research on territorial spatial planning based on data mining and geographic information visualization
- Fault diagnosis of agricultural sprinkler irrigation machinery equipment based on machine vision
- Closure technology of large span steel truss arch bridge with temporarily fixed edge supports
- Intelligent accounting question-answering robot based on a large language model and knowledge graph
- Analysis of manufacturing and retailer blockchain decision based on resource recyclability
- Flexible manufacturing workshop mechanical processing and product scheduling algorithm based on MES
- Exploration of indoor environment perception and design model based on virtual reality technology
- Tennis automatic ball-picking robot based on image object detection and positioning technology
- A new CNN deep learning model for computer-intelligent color matching
- Design of AR-based general computer technology experiment demonstration platform
- Indoor environment monitoring method based on the fusion of audio recognition and video patrol features
- Health condition prediction method of the computer numerical control machine tool parts by ensembling digital twins and improved LSTM networks
- Establishment of a green degree evaluation model for wall materials based on lifecycle
- Quantitative evaluation of college music teaching pronunciation based on nonlinear feature extraction
- Multi-index nonlinear robust virtual synchronous generator control method for microgrid inverters
- Manufacturing engineering production line scheduling management technology integrating availability constraints and heuristic rules
- Analysis of digital intelligent financial audit system based on improved BiLSTM neural network
- Attention community discovery model applied to complex network information analysis
- A neural collaborative filtering recommendation algorithm based on attention mechanism and contrastive learning
- Rehabilitation training method for motor dysfunction based on video stream matching
- Research on façade design for cold-region buildings based on artificial neural networks and parametric modeling techniques
- Intelligent implementation of muscle strain identification algorithm in Mi health exercise induced waist muscle strain
- Optimization design of urban rainwater and flood drainage system based on SWMM
- Improved GA for construction progress and cost management in construction projects
- Evaluation and prediction of SVM parameters in engineering cost based on random forest hybrid optimization
- Museum intelligent warning system based on wireless data module
- Optimization design and research of mechatronics based on torque motor control algorithm
- Special Issue: Nonlinear Engineering’s significance in Materials Science
- Experimental research on the degradation of chemical industrial wastewater by combined hydrodynamic cavitation based on nonlinear dynamic model
- Study on low-cycle fatigue life of nickel-based superalloy GH4586 at various temperatures
- Some results of solutions to neutral stochastic functional operator-differential equations
- Ultrasonic cavitation did not occur in high-pressure CO2 liquid
- Research on the performance of a novel type of cemented filler material for coal mine opening and filling
- Testing of recycled fine aggregate concrete’s mechanical properties using recycled fine aggregate concrete and research on technology for highway construction
- A modified fuzzy TOPSIS approach for the condition assessment of existing bridges
- Nonlinear structural and vibration analysis of straddle monorail pantograph under random excitations
- Achieving high efficiency and stability in blue OLEDs: Role of wide-gap hosts and emitter interactions
- Construction of teaching quality evaluation model of online dance teaching course based on improved PSO-BPNN
- Enhanced electrical conductivity and electromagnetic shielding properties of multi-component polymer/graphite nanocomposites prepared by solid-state shear milling
- Optimization of thermal characteristics of buried composite phase-change energy storage walls based on nonlinear engineering methods
- A higher-performance big data-based movie recommendation system
- Nonlinear impact of minimum wage on labor employment in China
- Nonlinear comprehensive evaluation method based on information entropy and discrimination optimization
- Application of numerical calculation methods in stability analysis of pile foundation under complex foundation conditions
- Research on the contribution of shale gas development and utilization in Sichuan Province to carbon peak based on the PSA process
- Characteristics of tight oil reservoirs and their impact on seepage flow from a nonlinear engineering perspective
- Nonlinear deformation decomposition and mode identification of plane structures via orthogonal theory
- Numerical simulation of damage mechanism in rock with cracks impacted by self-excited pulsed jet based on SPH-FEM coupling method: The perspective of nonlinear engineering and materials science
- Cross-scale modeling and collaborative optimization of ethanol-catalyzed coupling to produce C4 olefins: Nonlinear modeling and collaborative optimization strategies
- Unequal width T-node stress concentration factor analysis of stiffened rectangular steel pipe concrete
- Special Issue: Advances in Nonlinear Dynamics and Control
- Development of a cognitive blood glucose–insulin control strategy design for a nonlinear diabetic patient model
- Big data-based optimized model of building design in the context of rural revitalization
- Multi-UAV assisted air-to-ground data collection for ground sensors with unknown positions
- Design of urban and rural elderly care public areas integrating person-environment fit theory
- Application of lossless signal transmission technology in piano timbre recognition
- Application of improved GA in optimizing rural tourism routes
- Architectural animation generation system based on AL-GAN algorithm
- Advanced sentiment analysis in online shopping: Implementing LSTM models analyzing E-commerce user sentiments
- Intelligent recommendation algorithm for piano tracks based on the CNN model
- Visualization of large-scale user association feature data based on a nonlinear dimensionality reduction method
- Low-carbon economic optimization of microgrid clusters based on an energy interaction operation strategy
- Optimization effect of video data extraction and search based on Faster-RCNN hybrid model on intelligent information systems
- Construction of image segmentation system combining TC and swarm intelligence algorithm
- Particle swarm optimization and fuzzy C-means clustering algorithm for the adhesive layer defect detection
- Optimization of student learning status by instructional intervention decision-making techniques incorporating reinforcement learning
- Fuzzy model-based stabilization control and state estimation of nonlinear systems
- Optimization of distribution network scheduling based on BA and photovoltaic uncertainty
- Tai Chi movement segmentation and recognition on the grounds of multi-sensor data fusion and the DBSCAN algorithm
- Special Issue: Dynamic Engineering and Control Methods for the Nonlinear Systems - Part III
- Generalized numerical RKM method for solving sixth-order fractional partial differential equations