Generalized (ψ,φ)-contraction to investigate Volterra integral inclusions and fractal fractional PDEs in super-metric space with numerical experiments
-
Syed Khayyam Shah
 ,
Manel Hleili
,
Manel Hleili

Abstract
This article demonstrates the behavior of generalized (
1 Introduction
Integral inclusions and fractal fractional differential equations (
Integral inclusions help model dynamic systems properly because they can effectively describe the reasoning behind the processes. Particularly, integral inclusions of Volterra type
with non-empty compact values multivalued
Conversely, the introduction of the concept of fractal geometry into the equation of fractal fractional partial
where
Fixed point theory (FPT) serves as a powerful tool in studying integral inclusions and fractal
Furthermore, the concept of contraction has been expanded in several ways with regard to the domain of space. Karapinar and Khojasteh recently presented a new method to expand the metric structure, known as the super-metric space (
This article presents the characteristics of generalized
2 Preliminaries
In 1969, Wong and Boyd [22] introduced a novel category of contractive mappings referred to as
Theorem 2.1
[24] Consider a complete metric space
Furthermore, Dutta and Choudhary [25] established the generalization of Theorem 2.1 as below.
Theorem 2.2
[25] Consider a complete M-S
Moreover, in 2009, Zhang and Song [26] obtained the below generalization of Theorem 2.1.
Theorem 2.3
[26] Suppose
whereas Theorem
2.2
defines
Then, there must be a unique point
Dorić [27] have established a similar common FP theorem for two mappings, further extending the findings as mentioned above.
Theorem 2.4
[27] Suppose
where Theorem
2.2
define
Similarly, in 2017, He et al. [28] demonstrated the common FP theorem for two mappings that meet a generalized weak contractive-type condition of
Theorem 2.5
[28] Suppose
whereas Theorem
2.2
defines
Currently, in 2020, the researchers [29] under a rational expression obtained the result below for the generalized
Theorem 2.6
[29] Suppose
whereas Theorem
2.2
defines
Then, T has a unique FP.
Recently, Arya et al. [30] obtained two common FP results for mappings justifying the generalized
Theorem 2.7
[30] Suppose
whereas Theorem
2.2
defines
Then, there exists a unique point
Definition 2.8
[19] For a non-empty set
If
There we have
(13)
Example 2.9
[20] Suppose the set
Then, we can say
Example 2.10
[19] Suppose
so,
For this sequel, the concepts and notations listed below are essential. For a
3 Main results
This section will focus on establishing novel results of generalized
Here is our first result in this direction.
Theorem 3.1
Consider a complete
whereas Theorem
2.2
defines
Then, there exists a unique point
Proof
Suppose
where
It implies that
If
which is a contradiction. Hence, for all
Consequently, we have
Utilizing the lower semi-continuity of
Now, claiming
That is,
This means that
Thus, as
Inductively, it can be concluded that
Making
It implies that
and so
The above result can yield the following corollaries.
Corollary 3.2
Suppose
whereas Theorem
2.2
defines
Proof
The proof is quite simple by plugging
Corollary 3.3
Suppose
whereas Theorem
2.2
defines
Proof
Plugging
Corollary 3.4
Suppose
whereas Theorem
2.2
defines
Proof
This can be proved simply by plugging
Corollary 3.5
Suppose
whereas Theorem
2.2
defines
Proof
The proof is quite simple by plugging
Corollary 3.6
Suppose
whereas Theorem
2.2
define
Proof
The proof is quite simple by plugging
Remark 3.7
The corollary 3.6 is the result (2.1) of [24] in the context of super-metric spaces.
Remark 3.8
The corollary 3.5 is the result (2.2) of [25] in the context of
Corollary 3.9
Suppose
whereas Theorem
2.2
defines
Example 3.10
Suppose
Now, consider
Then, proving the below is not tedious, for choosing
All the necessities of Theorem 3.1, Corollaries 3.5 and 3.9 are fulfilled. Thus, the FP of
Furthermore, following the same flow, we would like to prove a common FP theorem for the
Theorem 3.11
Suppose
whereas Theorem
2.2
defines
Proof
Suppose
implies
where
which implies
Then, by (41),
where
If
which implies
Similarly, we can find that
Now, combining Eqs. (49) and (50)
for all
Utilizing the lower semi-continuity of
That is,
This means that
Inductively, it can be concluded that
Making
It implies that
and so
The above result (3.11) yields the following corollaries. If
Corollary 3.12
Suppose
whereas Theorem
2.2
defines
Putting
Corollary 3.13
Suppose
whereas Theorem
2.2
defines
4 Applications
In the following sections, we demonstrate the practical applications of the established findings. These applications aim to examine the validity of the established findings and offer assurance of the existence of common and unique solutions for integral inclusions of the Volterra type, as well as solutions for nonlinear
4.1 Application to Volterra integral inclusions
In this subsection, the existence of a solution to the system of Volterra integral inclusions is demonstrated in the frame work of super-metric space. Motivated by the works of [1,3] an existence result demonstrating the existence of the system of Volterra integral inclusions has been presented
for
Next, we present the proof as follows.
Theorem 4.1
Suppose that, for all
There exists a continuous function
(63)where
There exist
(64)
Proof
Using the Volterra integral inclusion (61), we can define two operators
for
Now, by taking
Hence, by Theorem 3.1,
4.2 Application to fractal
FPDE
s
In this section, we established existence results for investigation of the unique theoretical solution for general
where
Theorem 4.2
Let us assume that the following holds in a way that:
for
(69)with
There exists
(70)
Proof
In problem (59),
Since
Consequently, Eq. (68) could be transformed into
Consequently
Now, for
In the sequel, an example is presented to verify the validity of the obtained theoretical results.
Example 4.3
Based on system (61), by taking
we have the system of Volterra integral inclusions as follows:
for
is
It follows that
Thanks to Eq. (17), we obtain
Hence, by taking
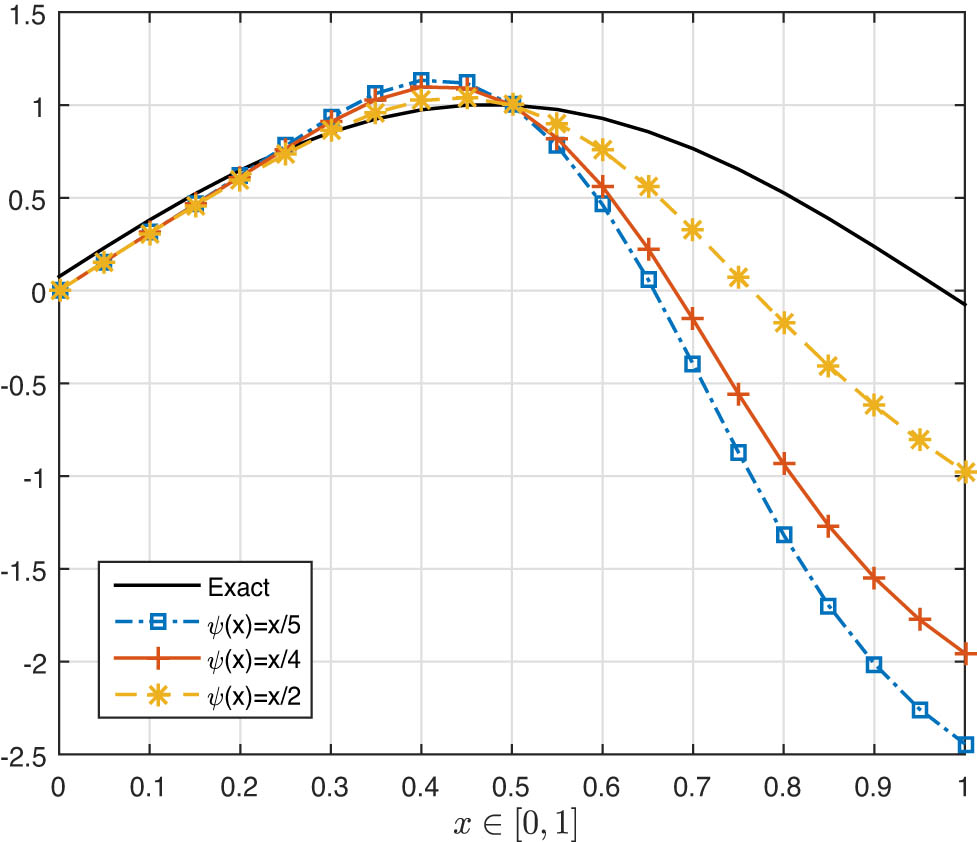
Table 1 displays the values of exact and suitable solutions of system (75) in Example 4.3 for
Therefore, system (75) has a solution based on common FPT for multi-valued operators.
|
|
Exact solution |
|
|
|
|||
|---|---|---|---|---|---|---|---|
| Suitable solution | Error | Suitable solution | Error | Suitable solution | Error | ||
| 0.00 | 0.0754 | 0.0000 | 0.0754 | 0.0000 | 0.0754 | 0.0000 | 0.0754 |
| 0.05 | 0.2309 | 0.1566 | 0.0744 | 0.1565 | 0.0744 | 0.1565 | 0.0744 |
| 0.10 | 0.3808 | 0.3110 | 0.0698 | 0.3106 | 0.0702 | 0.3098 | 0.0710 |
| 0.15 | 0.5212 | 0.4643 | 0.0569 | 0.4623 | 0.0589 | 0.4581 | 0.0631 |
| 0.20 | 0.6488 | 0.6201 | 0.0287 | 0.6137 | 0.0351 | 0.6007 | 0.0481 |
| 0.25 | 0.7604 | 0.7795 |
|
0.7650 |
|
0.7361 | 0.0244 |
| 0.30 | 0.8534 | 0.9344 |
|
0.9093 |
|
0.8592 |
|
| 0.35 | 0.9253 | 1.0629 |
|
1.0285 |
|
0.9598 |
|
| 0.40 | 0.9744 | 1.1336 |
|
1.0971 |
|
1.0241 |
|
| 0.45 | 0.9995 | 1.1176 |
|
1.0916 |
|
1.0397 |
|
| 0.50 | 1.0000 | 1.0000 | 0.0000 | 1.0000 | 0.0000 | 1.0000 | 0.0000 |
| 0.55 | 0.9759 | 0.7797 | 0.1962 | 0.8213 | 0.1546 | 0.9045 | 0.0714 |
| 0.60 | 0.9277 | 0.4630 | 0.4647 | 0.5606 | 0.3671 | 0.7558 | 0.1719 |
| 0.65 | 0.8568 | 0.0623 | 0.7944 | 0.2281 | 0.6287 | 0.5595 | 0.2972 |
| 0.70 | 0.7647 |
|
1.1615 |
|
0.9203 | 0.3267 | 0.4380 |
| 0.75 | 0.6538 |
|
1.5260 |
|
1.2101 | 0.0754 | 0.5784 |
| 0.80 | 0.5268 |
|
1.8439 |
|
1.4629 |
|
0.7009 |
| 0.85 | 0.3868 |
|
2.0865 |
|
1.6557 |
|
0.7943 |
| 0.90 | 0.2373 |
|
2.2480 |
|
1.7841 |
|
0.8562 |
| 0.95 | 0.0819 |
|
2.3382 |
|
1.8557 |
|
0.8906 |
| 1.00 |
|
|
2.3674 |
|
1.8788 |
|
0.9017 |
5 Conclusion
This article explores the generalization of the
Acknowledgements
Muhammad Sarwar and Thabet Abdeljawad would like to thank Prince Sultan University for APC.
-
Funding information: The authors state no funding involved.
-
Author contributions: S. Khayyam Shah and M. Sarwar developed the concept of the original draft. Further they both performed theoretical formalism, and analytic calculations. M. Hleili and Mohammad Esmael Samei performed the numerical simulations and also reviewed and edited the final drafts. T. Abdelajwad completed the formal analysis and Visualization for the manuscript. M. Sarwar and T. Abdeljawad supervised the project. All authors read and approved the final manuscript.
-
Conflict of interest: The authors declare that they have no competing interests.
-
Data availability statement: Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.
References
[1] Ali MU, Kamran T, Postolache M. Solution of Volterra integral inclusion in b-metric spaces via new fixed point theorem. Nonl Anal Model Control. 2017;22(1):17–30. 10.15388/NA.2017.1.2Search in Google Scholar
[2] Karapiiinar E, Abdeljawad T. Applying new fixed point theorems on fractional and ordinary differential equations. Adv Differ Equations. 2019;2019:421. 10.1186/s13662-019-2354-3Search in Google Scholar
[3] Dhage BC. A functional integral inclusion involving Carathéodories. Electron J Qualit Theory Differ Equ. 2003;14:1–18. 10.14232/ejqtde.2003.1.14Search in Google Scholar
[4] Singh R, Mishra J, Gupta VK. The dynamical analysis of a Tumor Growth model under the effect of fractal fractional Caputo-Fabrizio derivative. Int J Math Comput Eng. 2023;1:115–26. 10.2478/ijmce-2023-0009Search in Google Scholar
[5] O’Regan D. Integral inclusions of upper semi-continuous or lower semi-continuous type. Proceedings of the American Mathematical Society. 1996. p. 2391–9. 10.1090/S0002-9939-96-03456-9Search in Google Scholar
[6] Abodayeh K, Shah SK, Sarwar M, Promsakon C, Sitthiwirattham T. Ćirić-type generalized F-contractions with integral inclusion in super-metric spaces. Results Control Optimiz. 2024;16:100443. 10.1016/j.rico.2024.100443Search in Google Scholar
[7] Jan R, Boulaaras S, Alyobi S, Jawad M. Transmission dynamics of Hand-Foot-Mouth Disease with partial immunity through non-integer derivative. Int J Biomath. 2023;16(06):2250115. 10.1142/S1793524522501157Search in Google Scholar
[8] O’Regan D, Meehan M. Existence theory for nonlinear integral and integrodifferential equations. Netherlands: Springer; 2012. Search in Google Scholar
[9] Ata E, Kıymaz IO. New generalized Mellin transform and applications to partial and fractional differential equations. Int J Math Comput Eng. 2023;1(1):45–66. 10.2478/ijmce-2023-0004Search in Google Scholar
[10] Jan R, Boulaaras S, Alyobi S, Rajagopal K, Jawad M. Fractional dynamics of the transmission phenomena of dengue infection with vaccination. Discrete Contin Dyn Syst Ser S. 2022;16(8):2096–117. 10.3934/dcdss.2022154Search in Google Scholar
[11] Fatmawati F, Jan R, Khan MA, Khan Y, Ullah S. A new model of dengue fever in terms of fractional derivative. Math Biosci Eng. 2020;17(5):5267–88. 10.3934/mbe.2020285Search in Google Scholar PubMed
[12] Mlaiki N, Sagheer DeS, Noreen S, Batul S, Aloqaily A. Recent advances in proximity point theory applied to fractional differential equations. Axioms. 2024;13(6):395. 10.3390/axioms13060395Search in Google Scholar
[13] Erdogan F. A second order numerical method for singularly perturbed Volterra integro-differential equations with delay. Int J Math Comput Eng. 2024;2(1):85–96. 10.2478/ijmce-2024-0007Search in Google Scholar
[14] Jan A, Boulaaras S, Abdullah FA, Jan R. Dynamical analysis, infections in plants, and preventive policies utilizing the theory of fractional calculus. Europ Phys J Special Topics. 2023;232(14):2497–512. 10.1140/epjs/s11734-023-00926-1Search in Google Scholar
[15] Ali G, Khan RU, Kamran, Aloqaily A, Mlaiki N. On qualitative analysis of a fractional hybrid Langevin differential equation with novel boundary conditions. Boundary Value Problems. 2024;2024(1):62. 10.1186/s13661-024-01872-0Search in Google Scholar
[16] Jan R, Hinçal E, Hosseini K, Razak NNA, Abdeljawad T, Osman M. Fractional view analysis of the impact of vaccination on the dynamics of a viral infection. Alexandr Eng J. 2024;102:36–48. 10.1016/j.aej.2024.05.080Search in Google Scholar
[17] Abbas S, Ramzan M, Shafique A, Nazar M, Metwally ASM, Abduvalieva D, et al. Analysis of heat and mass transfer on nanofluid: An application of hybrid fractal-fractional derivative. Taylor & Francis: Numerical Heat Transfer, Part A: Applications. 2024. p. 1–14. 10.1080/10407782.2024.2366442Search in Google Scholar
[18] Kamran, SubhanA, Shah K, Subhi Aiadi S, Mlaiki N, Alotaibi FM. Analysis of Volterra integrodifferential equations with the fractal-fractional differential operator. Complexity. 2023;2023(1):7210126. 10.1155/2023/7210126Search in Google Scholar
[19] Karapinar E, Khojasteh F. Super metric spaces. Filomat. 2022;36(10):3545–9. 10.2298/FIL2210545KSearch in Google Scholar
[20] Karapinar E, Fulga A. Contraction in rational forms in the framework of super-metric spaces. Mathematics. 2022;10:3077. 10.3390/math10173077Search in Google Scholar
[21] Gourh R, Ughade M, Kumar Shukla M. On unique fixed-point theorems via interpolative and rational contractions in super-metric spaces. J Adv Math Comput Sci. 2024;39(2):11–9. 10.9734/jamcs/2024/v39i21865Search in Google Scholar
[22] Boyd DW, Wong JS. On nonlinear contractions. Proc Amer Math Soc. 1969;20:458–64. 10.2307/2035677Search in Google Scholar
[23] Alber YI, Guerre-Delabriere S. Principles of weakly contractive maps in Hilbert spaces. New Results Operat Theory Its Appl. 1997;98:7–22. 10.1007/978-3-0348-8910-0_2Search in Google Scholar
[24] Rhoades BE. Some theorems on weakly contractive maps. Nonl Anal Theory Methods Appl. 2001;47(4):2683–93. 10.1016/S0362-546X(01)00388-1Search in Google Scholar
[25] Dutta PN, Choudhary BS. A generalization of contraction principle in metric space. Fixed Point Theory Algorithms Sci Eng. 2008;2008:406368. 10.1155/2008/406368Search in Google Scholar
[26] Zhang Q, Song Y. Fixed point theory for generalized (ϕ)-weak contractions. Appl Math Lett. 2009;22(1):75–8. 10.1016/j.aml.2008.02.007Search in Google Scholar
[27] Dorić D. Common fixed point for generalized (ψ,ϕ)-weak contraction. Appl Math Lett. 2009;22(12):1896–900. 10.1016/j.aml.2009.08.001Search in Google Scholar
[28] He F, Sun YQ, Zhao XY. A common fixed point theorem for generalized (ψ,ϕ)-weak contractions of Suzuki type. J Math Anal. 2017;8(2):80–8. Search in Google Scholar
[29] Arya MC, Chandra N, Joshi MC. Fixed point of (ψ,ϕ)-contractions on metric spaces. J Anal. 2020;28(2):461–9. 10.1007/s41478-019-00181-5Search in Google Scholar
[30] Arya MC, Chandra N, Joshi MC. Common fixed point results for a generalized (ψ,ϕ)-rational contraction. Appl General Topol. 2023;24:129–44. 10.4995/agt.2023.18320Search in Google Scholar
© 2025 the author(s), published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Research Articles
- Generalized (ψ,φ)-contraction to investigate Volterra integral inclusions and fractal fractional PDEs in super-metric space with numerical experiments
- Solitons in ultrasound imaging: Exploring applications and enhancements via the Westervelt equation
- Stochastic improved Simpson for solving nonlinear fractional-order systems using product integration rules
- Exploring dynamical features like bifurcation assessment, sensitivity visualization, and solitary wave solutions of the integrable Akbota equation
- Research on surface defect detection method and optimization of paper-plastic composite bag based on improved combined segmentation algorithm
- Impact the sulphur content in Iraqi crude oil on the mechanical properties and corrosion behaviour of carbon steel in various types of API 5L pipelines and ASTM 106 grade B
- Unravelling quiescent optical solitons: An exploration of the complex Ginzburg–Landau equation with nonlinear chromatic dispersion and self-phase modulation
- Perturbation-iteration approach for fractional-order logistic differential equations
- Variational formulations for the Euler and Navier–Stokes systems in fluid mechanics and related models
- Rotor response to unbalanced load and system performance considering variable bearing profile
- DeepFowl: Disease prediction from chicken excreta images using deep learning
- Channel flow of Ellis fluid due to cilia motion
- A case study of fractional-order varicella virus model to nonlinear dynamics strategy for control and prevalence
- Multi-point estimation weldment recognition and estimation of pose with data-driven robotics design
- Analysis of Hall current and nonuniform heating effects on magneto-convection between vertically aligned plates under the influence of electric and magnetic fields
- A comparative study on residual power series method and differential transform method through the time-fractional telegraph equation
- Insights from the nonlinear Schrödinger–Hirota equation with chromatic dispersion: Dynamics in fiber–optic communication
- Mathematical analysis of Jeffrey ferrofluid on stretching surface with the Darcy–Forchheimer model
- Exploring the interaction between lump, stripe and double-stripe, and periodic wave solutions of the Konopelchenko–Dubrovsky–Kaup–Kupershmidt system
- Computational investigation of tuberculosis and HIV/AIDS co-infection in fuzzy environment
- Signature verification by geometry and image processing
- Theoretical and numerical approach for quantifying sensitivity to system parameters of nonlinear systems
- Chaotic behaviors, stability, and solitary wave propagations of M-fractional LWE equation in magneto-electro-elastic circular rod
- Dynamic analysis and optimization of syphilis spread: Simulations, integrating treatment and public health interventions
- Visco-thermoelastic rectangular plate under uniform loading: A study of deflection
- Threshold dynamics and optimal control of an epidemiological smoking model
- Numerical computational model for an unsteady hybrid nanofluid flow in a porous medium past an MHD rotating sheet
- Regression prediction model of fabric brightness based on light and shadow reconstruction of layered images
- Dynamics and prevention of gemini virus infection in red chili crops studied with generalized fractional operator: Analysis and modeling
- Qualitative analysis on existence and stability of nonlinear fractional dynamic equations on time scales
- Fractional-order super-twisting sliding mode active disturbance rejection control for electro-hydraulic position servo systems
- Analytical exploration and parametric insights into optical solitons in magneto-optic waveguides: Advances in nonlinear dynamics for applied sciences
- Bifurcation dynamics and optical soliton structures in the nonlinear Schrödinger–Bopp–Podolsky system
- User profiling in university libraries by combining multi-perspective clustering algorithm and reader behavior analysis
- Review Article
- Haar wavelet collocation method for existence and numerical solutions of fourth-order integro-differential equations with bounded coefficients
- Special Issue: Nonlinear Analysis and Design of Communication Networks for IoT Applications - Part II
- Silicon-based all-optical wavelength converter for on-chip optical interconnection
- Research on a path-tracking control system of unmanned rollers based on an optimization algorithm and real-time feedback
- Analysis of the sports action recognition model based on the LSTM recurrent neural network
- Industrial robot trajectory error compensation based on enhanced transfer convolutional neural networks
- Research on IoT network performance prediction model of power grid warehouse based on nonlinear GA-BP neural network
- Interactive recommendation of social network communication between cities based on GNN and user preferences
- Application of improved P-BEM in time varying channel prediction in 5G high-speed mobile communication system
- Construction of a BIM smart building collaborative design model combining the Internet of Things
- Optimizing malicious website prediction: An advanced XGBoost-based machine learning model
- Economic operation analysis of the power grid combining communication network and distributed optimization algorithm
- Sports video temporal action detection technology based on an improved MSST algorithm
- Internet of things data security and privacy protection based on improved federated learning
- Enterprise power emission reduction technology based on the LSTM–SVM model
- Construction of multi-style face models based on artistic image generation algorithms
- Research and application of interactive digital twin monitoring system for photovoltaic power station based on global perception
- Special Issue: Decision and Control in Nonlinear Systems - Part II
- Animation video frame prediction based on ConvGRU fine-grained synthesis flow
- Application of GGNN inference propagation model for martial art intensity evaluation
- Benefit evaluation of building energy-saving renovation projects based on BWM weighting method
- Deep neural network application in real-time economic dispatch and frequency control of microgrids
- Real-time force/position control of soft growing robots: A data-driven model predictive approach
- Mechanical product design and manufacturing system based on CNN and server optimization algorithm
- Application of finite element analysis in the formal analysis of ancient architectural plaque section
- Research on territorial spatial planning based on data mining and geographic information visualization
- Fault diagnosis of agricultural sprinkler irrigation machinery equipment based on machine vision
- Closure technology of large span steel truss arch bridge with temporarily fixed edge supports
- Intelligent accounting question-answering robot based on a large language model and knowledge graph
- Analysis of manufacturing and retailer blockchain decision based on resource recyclability
- Flexible manufacturing workshop mechanical processing and product scheduling algorithm based on MES
- Exploration of indoor environment perception and design model based on virtual reality technology
- Tennis automatic ball-picking robot based on image object detection and positioning technology
- A new CNN deep learning model for computer-intelligent color matching
- Design of AR-based general computer technology experiment demonstration platform
- Indoor environment monitoring method based on the fusion of audio recognition and video patrol features
- Health condition prediction method of the computer numerical control machine tool parts by ensembling digital twins and improved LSTM networks
- Establishment of a green degree evaluation model for wall materials based on lifecycle
- Quantitative evaluation of college music teaching pronunciation based on nonlinear feature extraction
- Multi-index nonlinear robust virtual synchronous generator control method for microgrid inverters
- Manufacturing engineering production line scheduling management technology integrating availability constraints and heuristic rules
- Analysis of digital intelligent financial audit system based on improved BiLSTM neural network
- Attention community discovery model applied to complex network information analysis
- A neural collaborative filtering recommendation algorithm based on attention mechanism and contrastive learning
- Rehabilitation training method for motor dysfunction based on video stream matching
- Research on façade design for cold-region buildings based on artificial neural networks and parametric modeling techniques
- Intelligent implementation of muscle strain identification algorithm in Mi health exercise induced waist muscle strain
- Optimization design of urban rainwater and flood drainage system based on SWMM
- Improved GA for construction progress and cost management in construction projects
- Evaluation and prediction of SVM parameters in engineering cost based on random forest hybrid optimization
- Museum intelligent warning system based on wireless data module
- Optimization design and research of mechatronics based on torque motor control algorithm
- Special Issue: Nonlinear Engineering’s significance in Materials Science
- Experimental research on the degradation of chemical industrial wastewater by combined hydrodynamic cavitation based on nonlinear dynamic model
- Study on low-cycle fatigue life of nickel-based superalloy GH4586 at various temperatures
- Some results of solutions to neutral stochastic functional operator-differential equations
- Ultrasonic cavitation did not occur in high-pressure CO2 liquid
- Research on the performance of a novel type of cemented filler material for coal mine opening and filling
- Testing of recycled fine aggregate concrete’s mechanical properties using recycled fine aggregate concrete and research on technology for highway construction
- A modified fuzzy TOPSIS approach for the condition assessment of existing bridges
- Nonlinear structural and vibration analysis of straddle monorail pantograph under random excitations
- Achieving high efficiency and stability in blue OLEDs: Role of wide-gap hosts and emitter interactions
- Construction of teaching quality evaluation model of online dance teaching course based on improved PSO-BPNN
- Enhanced electrical conductivity and electromagnetic shielding properties of multi-component polymer/graphite nanocomposites prepared by solid-state shear milling
- Optimization of thermal characteristics of buried composite phase-change energy storage walls based on nonlinear engineering methods
- A higher-performance big data-based movie recommendation system
- Nonlinear impact of minimum wage on labor employment in China
- Nonlinear comprehensive evaluation method based on information entropy and discrimination optimization
- Application of numerical calculation methods in stability analysis of pile foundation under complex foundation conditions
- Research on the contribution of shale gas development and utilization in Sichuan Province to carbon peak based on the PSA process
- Characteristics of tight oil reservoirs and their impact on seepage flow from a nonlinear engineering perspective
- Nonlinear deformation decomposition and mode identification of plane structures via orthogonal theory
- Numerical simulation of damage mechanism in rock with cracks impacted by self-excited pulsed jet based on SPH-FEM coupling method: The perspective of nonlinear engineering and materials science
- Cross-scale modeling and collaborative optimization of ethanol-catalyzed coupling to produce C4 olefins: Nonlinear modeling and collaborative optimization strategies
- Unequal width T-node stress concentration factor analysis of stiffened rectangular steel pipe concrete
- Special Issue: Advances in Nonlinear Dynamics and Control
- Development of a cognitive blood glucose–insulin control strategy design for a nonlinear diabetic patient model
- Big data-based optimized model of building design in the context of rural revitalization
- Multi-UAV assisted air-to-ground data collection for ground sensors with unknown positions
- Design of urban and rural elderly care public areas integrating person-environment fit theory
- Application of lossless signal transmission technology in piano timbre recognition
- Application of improved GA in optimizing rural tourism routes
- Architectural animation generation system based on AL-GAN algorithm
- Advanced sentiment analysis in online shopping: Implementing LSTM models analyzing E-commerce user sentiments
- Intelligent recommendation algorithm for piano tracks based on the CNN model
- Visualization of large-scale user association feature data based on a nonlinear dimensionality reduction method
- Low-carbon economic optimization of microgrid clusters based on an energy interaction operation strategy
- Optimization effect of video data extraction and search based on Faster-RCNN hybrid model on intelligent information systems
- Construction of image segmentation system combining TC and swarm intelligence algorithm
- Particle swarm optimization and fuzzy C-means clustering algorithm for the adhesive layer defect detection
- Optimization of student learning status by instructional intervention decision-making techniques incorporating reinforcement learning
- Fuzzy model-based stabilization control and state estimation of nonlinear systems
- Optimization of distribution network scheduling based on BA and photovoltaic uncertainty
- Tai Chi movement segmentation and recognition on the grounds of multi-sensor data fusion and the DBSCAN algorithm
- Special Issue: Dynamic Engineering and Control Methods for the Nonlinear Systems - Part III
- Generalized numerical RKM method for solving sixth-order fractional partial differential equations
Articles in the same Issue
- Research Articles
- Generalized (ψ,φ)-contraction to investigate Volterra integral inclusions and fractal fractional PDEs in super-metric space with numerical experiments
- Solitons in ultrasound imaging: Exploring applications and enhancements via the Westervelt equation
- Stochastic improved Simpson for solving nonlinear fractional-order systems using product integration rules
- Exploring dynamical features like bifurcation assessment, sensitivity visualization, and solitary wave solutions of the integrable Akbota equation
- Research on surface defect detection method and optimization of paper-plastic composite bag based on improved combined segmentation algorithm
- Impact the sulphur content in Iraqi crude oil on the mechanical properties and corrosion behaviour of carbon steel in various types of API 5L pipelines and ASTM 106 grade B
- Unravelling quiescent optical solitons: An exploration of the complex Ginzburg–Landau equation with nonlinear chromatic dispersion and self-phase modulation
- Perturbation-iteration approach for fractional-order logistic differential equations
- Variational formulations for the Euler and Navier–Stokes systems in fluid mechanics and related models
- Rotor response to unbalanced load and system performance considering variable bearing profile
- DeepFowl: Disease prediction from chicken excreta images using deep learning
- Channel flow of Ellis fluid due to cilia motion
- A case study of fractional-order varicella virus model to nonlinear dynamics strategy for control and prevalence
- Multi-point estimation weldment recognition and estimation of pose with data-driven robotics design
- Analysis of Hall current and nonuniform heating effects on magneto-convection between vertically aligned plates under the influence of electric and magnetic fields
- A comparative study on residual power series method and differential transform method through the time-fractional telegraph equation
- Insights from the nonlinear Schrödinger–Hirota equation with chromatic dispersion: Dynamics in fiber–optic communication
- Mathematical analysis of Jeffrey ferrofluid on stretching surface with the Darcy–Forchheimer model
- Exploring the interaction between lump, stripe and double-stripe, and periodic wave solutions of the Konopelchenko–Dubrovsky–Kaup–Kupershmidt system
- Computational investigation of tuberculosis and HIV/AIDS co-infection in fuzzy environment
- Signature verification by geometry and image processing
- Theoretical and numerical approach for quantifying sensitivity to system parameters of nonlinear systems
- Chaotic behaviors, stability, and solitary wave propagations of M-fractional LWE equation in magneto-electro-elastic circular rod
- Dynamic analysis and optimization of syphilis spread: Simulations, integrating treatment and public health interventions
- Visco-thermoelastic rectangular plate under uniform loading: A study of deflection
- Threshold dynamics and optimal control of an epidemiological smoking model
- Numerical computational model for an unsteady hybrid nanofluid flow in a porous medium past an MHD rotating sheet
- Regression prediction model of fabric brightness based on light and shadow reconstruction of layered images
- Dynamics and prevention of gemini virus infection in red chili crops studied with generalized fractional operator: Analysis and modeling
- Qualitative analysis on existence and stability of nonlinear fractional dynamic equations on time scales
- Fractional-order super-twisting sliding mode active disturbance rejection control for electro-hydraulic position servo systems
- Analytical exploration and parametric insights into optical solitons in magneto-optic waveguides: Advances in nonlinear dynamics for applied sciences
- Bifurcation dynamics and optical soliton structures in the nonlinear Schrödinger–Bopp–Podolsky system
- User profiling in university libraries by combining multi-perspective clustering algorithm and reader behavior analysis
- Review Article
- Haar wavelet collocation method for existence and numerical solutions of fourth-order integro-differential equations with bounded coefficients
- Special Issue: Nonlinear Analysis and Design of Communication Networks for IoT Applications - Part II
- Silicon-based all-optical wavelength converter for on-chip optical interconnection
- Research on a path-tracking control system of unmanned rollers based on an optimization algorithm and real-time feedback
- Analysis of the sports action recognition model based on the LSTM recurrent neural network
- Industrial robot trajectory error compensation based on enhanced transfer convolutional neural networks
- Research on IoT network performance prediction model of power grid warehouse based on nonlinear GA-BP neural network
- Interactive recommendation of social network communication between cities based on GNN and user preferences
- Application of improved P-BEM in time varying channel prediction in 5G high-speed mobile communication system
- Construction of a BIM smart building collaborative design model combining the Internet of Things
- Optimizing malicious website prediction: An advanced XGBoost-based machine learning model
- Economic operation analysis of the power grid combining communication network and distributed optimization algorithm
- Sports video temporal action detection technology based on an improved MSST algorithm
- Internet of things data security and privacy protection based on improved federated learning
- Enterprise power emission reduction technology based on the LSTM–SVM model
- Construction of multi-style face models based on artistic image generation algorithms
- Research and application of interactive digital twin monitoring system for photovoltaic power station based on global perception
- Special Issue: Decision and Control in Nonlinear Systems - Part II
- Animation video frame prediction based on ConvGRU fine-grained synthesis flow
- Application of GGNN inference propagation model for martial art intensity evaluation
- Benefit evaluation of building energy-saving renovation projects based on BWM weighting method
- Deep neural network application in real-time economic dispatch and frequency control of microgrids
- Real-time force/position control of soft growing robots: A data-driven model predictive approach
- Mechanical product design and manufacturing system based on CNN and server optimization algorithm
- Application of finite element analysis in the formal analysis of ancient architectural plaque section
- Research on territorial spatial planning based on data mining and geographic information visualization
- Fault diagnosis of agricultural sprinkler irrigation machinery equipment based on machine vision
- Closure technology of large span steel truss arch bridge with temporarily fixed edge supports
- Intelligent accounting question-answering robot based on a large language model and knowledge graph
- Analysis of manufacturing and retailer blockchain decision based on resource recyclability
- Flexible manufacturing workshop mechanical processing and product scheduling algorithm based on MES
- Exploration of indoor environment perception and design model based on virtual reality technology
- Tennis automatic ball-picking robot based on image object detection and positioning technology
- A new CNN deep learning model for computer-intelligent color matching
- Design of AR-based general computer technology experiment demonstration platform
- Indoor environment monitoring method based on the fusion of audio recognition and video patrol features
- Health condition prediction method of the computer numerical control machine tool parts by ensembling digital twins and improved LSTM networks
- Establishment of a green degree evaluation model for wall materials based on lifecycle
- Quantitative evaluation of college music teaching pronunciation based on nonlinear feature extraction
- Multi-index nonlinear robust virtual synchronous generator control method for microgrid inverters
- Manufacturing engineering production line scheduling management technology integrating availability constraints and heuristic rules
- Analysis of digital intelligent financial audit system based on improved BiLSTM neural network
- Attention community discovery model applied to complex network information analysis
- A neural collaborative filtering recommendation algorithm based on attention mechanism and contrastive learning
- Rehabilitation training method for motor dysfunction based on video stream matching
- Research on façade design for cold-region buildings based on artificial neural networks and parametric modeling techniques
- Intelligent implementation of muscle strain identification algorithm in Mi health exercise induced waist muscle strain
- Optimization design of urban rainwater and flood drainage system based on SWMM
- Improved GA for construction progress and cost management in construction projects
- Evaluation and prediction of SVM parameters in engineering cost based on random forest hybrid optimization
- Museum intelligent warning system based on wireless data module
- Optimization design and research of mechatronics based on torque motor control algorithm
- Special Issue: Nonlinear Engineering’s significance in Materials Science
- Experimental research on the degradation of chemical industrial wastewater by combined hydrodynamic cavitation based on nonlinear dynamic model
- Study on low-cycle fatigue life of nickel-based superalloy GH4586 at various temperatures
- Some results of solutions to neutral stochastic functional operator-differential equations
- Ultrasonic cavitation did not occur in high-pressure CO2 liquid
- Research on the performance of a novel type of cemented filler material for coal mine opening and filling
- Testing of recycled fine aggregate concrete’s mechanical properties using recycled fine aggregate concrete and research on technology for highway construction
- A modified fuzzy TOPSIS approach for the condition assessment of existing bridges
- Nonlinear structural and vibration analysis of straddle monorail pantograph under random excitations
- Achieving high efficiency and stability in blue OLEDs: Role of wide-gap hosts and emitter interactions
- Construction of teaching quality evaluation model of online dance teaching course based on improved PSO-BPNN
- Enhanced electrical conductivity and electromagnetic shielding properties of multi-component polymer/graphite nanocomposites prepared by solid-state shear milling
- Optimization of thermal characteristics of buried composite phase-change energy storage walls based on nonlinear engineering methods
- A higher-performance big data-based movie recommendation system
- Nonlinear impact of minimum wage on labor employment in China
- Nonlinear comprehensive evaluation method based on information entropy and discrimination optimization
- Application of numerical calculation methods in stability analysis of pile foundation under complex foundation conditions
- Research on the contribution of shale gas development and utilization in Sichuan Province to carbon peak based on the PSA process
- Characteristics of tight oil reservoirs and their impact on seepage flow from a nonlinear engineering perspective
- Nonlinear deformation decomposition and mode identification of plane structures via orthogonal theory
- Numerical simulation of damage mechanism in rock with cracks impacted by self-excited pulsed jet based on SPH-FEM coupling method: The perspective of nonlinear engineering and materials science
- Cross-scale modeling and collaborative optimization of ethanol-catalyzed coupling to produce C4 olefins: Nonlinear modeling and collaborative optimization strategies
- Unequal width T-node stress concentration factor analysis of stiffened rectangular steel pipe concrete
- Special Issue: Advances in Nonlinear Dynamics and Control
- Development of a cognitive blood glucose–insulin control strategy design for a nonlinear diabetic patient model
- Big data-based optimized model of building design in the context of rural revitalization
- Multi-UAV assisted air-to-ground data collection for ground sensors with unknown positions
- Design of urban and rural elderly care public areas integrating person-environment fit theory
- Application of lossless signal transmission technology in piano timbre recognition
- Application of improved GA in optimizing rural tourism routes
- Architectural animation generation system based on AL-GAN algorithm
- Advanced sentiment analysis in online shopping: Implementing LSTM models analyzing E-commerce user sentiments
- Intelligent recommendation algorithm for piano tracks based on the CNN model
- Visualization of large-scale user association feature data based on a nonlinear dimensionality reduction method
- Low-carbon economic optimization of microgrid clusters based on an energy interaction operation strategy
- Optimization effect of video data extraction and search based on Faster-RCNN hybrid model on intelligent information systems
- Construction of image segmentation system combining TC and swarm intelligence algorithm
- Particle swarm optimization and fuzzy C-means clustering algorithm for the adhesive layer defect detection
- Optimization of student learning status by instructional intervention decision-making techniques incorporating reinforcement learning
- Fuzzy model-based stabilization control and state estimation of nonlinear systems
- Optimization of distribution network scheduling based on BA and photovoltaic uncertainty
- Tai Chi movement segmentation and recognition on the grounds of multi-sensor data fusion and the DBSCAN algorithm
- Special Issue: Dynamic Engineering and Control Methods for the Nonlinear Systems - Part III
- Generalized numerical RKM method for solving sixth-order fractional partial differential equations