Studying bifurcations and chaotic dynamics in the generalized hyperelastic-rod wave equation through Hamiltonian mechanics
-
Hongwei Ma


Abstract
This article introduces a novel modified
1 Introduction
Nonlinear partial differential equations (NPDEs) constitute a vital mathematical apparatus for encapsulating a broad array of physical phenomena. In the realm of physics, they capture the essence of processes such as heat conduction within solid materials and the mechanics of wave transmission. In the biological sciences, NPDEs are indispensable for modeling complex systems. Their utility extends to various other disciplines, including electrical engineering, quantum mechanics, plasma physics, and the study of fluid dynamics. During the past three decades, there has been a surge in the development and application of fractional NPDEs, which incorporate noninteger order derivatives in either time or space. This advancement has generated considerable academic and practical interest, resulting in a proliferation of scholarly gatherings and in-depth research endeavors. Fractional NPDEs have proven to be particularly useful in a multitude of sectors, including engineering, physics, biology, fluid dynamics, and financial markets, among several others. Their versatility and adaptability make them a cornerstone in the mathematical modeling of complex systems across these diverse fields [1–8].
Finding analytical solutions for nonlinear PDEs, especially precise solitary wave solutions, poses a challenging task. Various mathematical techniques are employed to derive explicit solitary wave solutions. These include the direct algebraic method [9], the sine-Gordon expansion method [10], Hirota’s direct method [11], the innovative MEDA method [12,13], the Riccati equation mapping method [14], the Sardar subequation method [15], and applications involving Jacobi elliptic functions [16]. These methods represent diverse approaches aimed at extracting exact solutions from nonlinear PDEs, each offering unique advantages depending on the specific characteristics of the equation under study.
The background model of the generalized hyperelastic-rod wave equation (GHRWE) can be traced back to the study of elastic compressible materials, which is widely applied in the field of elasticity mechanics and holds significant research value. This model describes the nonlinear dynamic behavior of a one-dimensional hyperelastic rod under large deformations and is one of the classic models in the field of nonlinear dynamics. The GHRWE model was proposed to capture and describe the complex dynamic response of fluids or rod-like structures when subjected to external forces, especially in situations involving large deformations and nonlinear factors. The GHEWE finds extensive applications in characterizing the wave behavior of fibers, rods, and various hyperelastic materials. It’s instrumental in analyzing the vibration response of flexible components, such as satellite deployable arms and antennas, during different phases like launch, orbit, and operation. This analysis aids in optimizing designs for better structural performance and stability. As a mathematical framework for describing the dynamics of intricate materials and structures, the GHEWE carries substantial research and practical value in numerous fields. In this study, we delve deeper into the nonlinear, conformable time-fractional dynamics inherent to the GHRWE. Integrals and fractional derivatives play a vital role in modeling materials and processes with nonlinear temporal behaviors, such as anomalous diffusion marked by variable memory effects. Cohen developed geometric finite difference schemes specifically designed for the GHEWE [17]. Meanwhile, Tian approached the GHRWE by integrating Kato’s theory, conservation laws, and blow-up rates [18]. Va employed the Hirota bilinear method to manipulate rogue waves in compressible hyperelastic plates [19]. Demiray derived exact solitary wave solutions for both the Kraenkel-Manna-Merle system and the GHRWE using the generalized Kudryashov method [20]. Novruzov investigated the blow-up phenomenon associated with the GHRWE [21].
Research on chaos, fractals, and soliton theory in nonlinear differential equations has emerged as a prominent area of focus in the contemporary scientific research. Houwe et al. conducted an analysis of modulation instability, bifurcation phenomena, and solitonic waves within the nonlinear Schrödinger equation (NLSE) [22]. Akinyemi’s team explored solitary waves and modulation instability within higher-order NLSE contexts [23]. Mathanaranjan’s group made significant advancements in understanding chirped optical solitons and their stability [24]. Akinyemi also investigated optical soliton solutions for a nonlinear Schrödinger equation characterized by parabolic nonlinearity [25]. Debin et al. identified soliton wave solutions for the (2+1)-dimensional Sawada-Kotera equation [26]. Wazwaz and Kaur derived optical solitons using both the variational iteration method [27] and an enhanced
Fractional-order derivatives are frequently preferred over traditional derivatives because they offer a continuous spectrum of solutions within the range (0, 1], as opposed to the distinct, separate solutions provided by classical derivatives. The team led by Morales-Delgado employed fractional conformable derivatives of the Liouville-Caputo variety [38], while Solís Pérez’s work implemented these derivatives in the context of the Liouville-Caputo sense [39]. Yépez-Martínez and his associates studied nonlinear differential equations utilizing conformable derivatives [40]. Consequently, conformable fractional order derivatives have gained widespread acceptance and application in various research fields [12,41,42].
In this study, fractional-order GHRWE attracts more attention compared to integer-order GHRWE due to its superior adaptability, model accuracy, dynamic response of complex materials, and broad application prospects. In 2023, Simbanefayi’s team investigated the integer-order GHRWE to seek travelling wave solutions [43]. In 2024, Shahzad’s group studied the exact solutions of fractional-order GHRWE [44]. GHRWE is essentially a nonlinear partial differential equation, and from the outcomes of these previous articles [43,44], aspects such as chaos, fractals, sensitivity analysis, and comparisons of solutions under different fractional derivative forms have not yet been investigated. In this article, we will employ the trial equation method to construct the Hamiltonian structure of GHRWE and investigate the associated behaviors such as chaos and fractals. Furthermore, we focus on a specific technique: the improved
In this article, we define the conformable fractional derivative (CFD) of a function
If the aforementioned limit exists, then
The properties mentioned in [40] are applied for CFD. The fractional-order GHRWE studied in this article is primarily analyzed in the context of CFD.
2 Mathematical formulation
2.1 Application trial equation method to GHRWE
In this subsection, we employ the trial equation method to construct the Hamiltonian structure of GHRWE, laying the groundwork for obtaining exact solutions of the equations and exploring chaos, fractals, and related phenomena.
where
where
where
where
Next, we employ the trial equation method to construct the solution for Eq. (5). We assume that the solution to Eq. (5) satisfies the trial equations as described in [45,46]:
where
Taking Eqs. (7) and (8) into Eq. (5) and setting the coefficients of
where
2.2 The modified
G
′
G
2
-expansion method
Below, we introduce the modified
First, let’s consider the following nonlinear fractional PDE:
in this context,
Step 1. Taking
in Eq. (11), a polynomial of
Step 2. We propose that the solution to Eq. (11) can be expressed as a polynomial in terms of
in Eq. (12), the function
In this context,
Step 3. By substituting Eq. (12) into Eq. (11) and utilizing (13), Eq. (11) is transformed into a polynomial in terms of
Step 4. The specific values of the constants
where
Step 5. By applying the inverse transform
2.3 Employing the modified
G
′
G
2
-expansion method to the Eq. (7)
Since we applied the trial equation method to simplify Eq. (5), following earlier calculations, we obtained a new simplified nonlinear Eq. (7). Therefore, here, we directly solve Eq. (7), and the exact solutions obtained are actually solutions of Eq. (5).
In accordance with the principles of the
By applying the principle of homogeneous equilibrium, we can easily determine that
where,
We gather all terms with the same power of
The equations given by Eq. (17) are solved using Maple 2021, resulting in 15 different sets for the undetermined coefficients:
3 Findings and discussion
3.1 Visual interpretation of the derived solutions
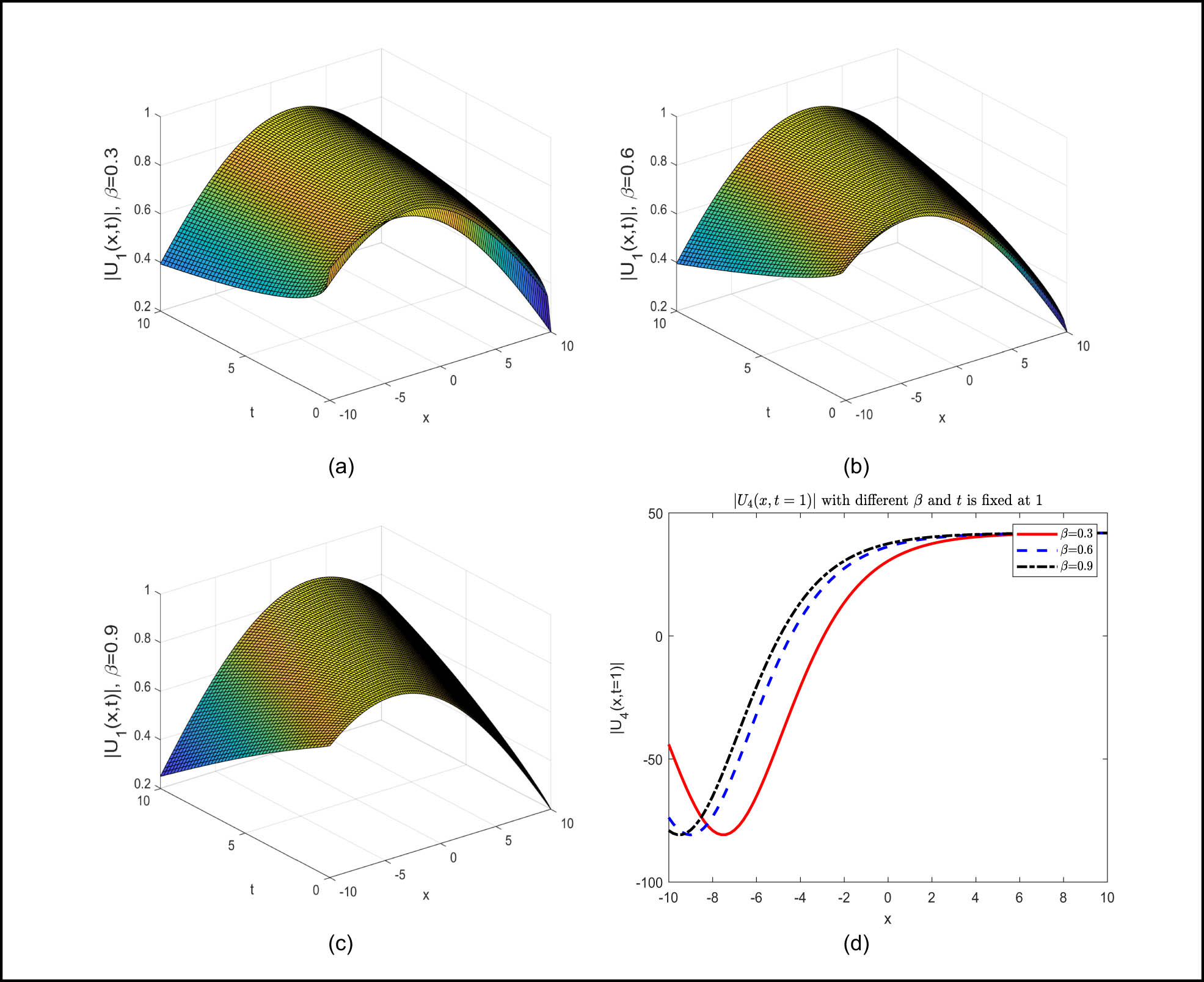
In this section, we delve into the graphical analysis of the solitary wave structures that have been extracted for a range of constant values. In this context, soliton solutions represent a distinct category of solutions that are localized, are stable, and maintain their shape and amplitude as they propagate. Solitons are important in various fields, including physics, engineering, and applied mathematics. Based on the ideas of [53], moreover, we explored the influence of changes in different values of the fractional-order
Figure 1: The 3D representations of the individual parabolic solitons, denoted by

Individual U-shaped solitons in 3D representation: The CFD results for
Figure 2: The 3D representations of the inverted U solitons, shown by
Inverted anti U solitons in 3D representation: The CFD results for
Figure 3: The 3D illustrations of the single W-shaped solitons, depicted by

Single W-shaped solitons in 3D representation: The CFD results for
Figure 4: (a)–(c) present 3D representations of the bright-dark alternation solitons, illustrated by

Bright-dark alternation solitons in 3D representation: The CFD results for
This study, based on in-depth research, has successfully derived a diverse and unique set of soliton structures, ranging from simple parabolic solitons to complex inverted U-shaped soliton arrangements, as well as unique single W-shaped and intriguing dark-bright soliton solutions. The revelation of these structures not only injects new vitality into our theoretical models, making them more vibrant and diverse, but importantly it opens a gateway to a deeper understanding of the complex nonlinear dynamics of the GHRWE. We have promptly examined the newly derived computational solutions
From a physical perspective, the study of soliton structures has far-reaching implications. Solitons are stable wave forms that can maintain their shape during propagation, a characteristic that makes them evident in various branches of physics, including fluid mechanics, nonlinear optics, and plasma physics. For instance, in nonlinear optics, optical solitons can propagate over long distances in optical fibers without distortion, which is of significant importance for the development of high-speed communication networks. The stability and particle-like nature of solitons also mean they can be regarded as particles with mass, which is particularly crucial in studying particle behavior in plasmas.
In summary, the study of soliton structures not only enriches our understanding of nonlinear dynamics but also has broad prospects in practical applications, including communication technology, simulation and prediction of physical phenomena, and optimization design of engineering structures. By delving into these soliton structures, we can better grasp and utilize nonlinear phenomena in nature, driving the progress of science and technology. The visual examination of the soliton solutions studied demonstrates that the applied method is capable of effectively addressing our query, with the solution being computed using Maple 2020.
3.2 A comparable study on CFD concerning different fractional-order derivatives
By conducting a similar analysis of three distinct fractional order derivatives, we obtain the CFD, a form of Beta fractional-order derivative (BD), and various types of Riemann-Liouville fractional order derivatives (RL). These derivatives are used to transform a fractional PDE into an ODE, therefore making the analysis more straightforward. We concentrate on three unique fractional derivatives: the CFD, the BD, and the RL. Under specific conditions, the variable
In this comparative study, the results of this research are assessed for their effectiveness by comparing them with those obtained through the
For the CFD,
By adjusting the values of the free parameters, we visually demonstrated the impact of fractional orders on two different analytical solutions, utilizing the three aforementioned fractional derivatives. To validate the accuracy of our analyzed solutions, we conducted a comparative evaluation of three fractional wave solutions, as detailed in Eqs. (33) and (34). This evaluation included CFD, RL, and BD, as depicted in Figure 5(a)--(b). Therefore, it is clear that the CFD, BD, and RL derivatives exhibit a high degree of similarity, with only minor differences among them. Through a comprehensive analysis of the results, we confidently assert that the research solutions based on the CFD framework demonstrate universality in the selection of different fractional derivatives.

Analyzing fractional wave solutions through different fractional derivatives: A CFD analysis is performed on the obtained solutions, particularly focusing on
3.3 Phase and bifurcation analysis
Similar to the transformations in literature [54] and [55], we also perform the following transformation:
Our emphasis is on Eq. (7):
The following sections will examine Eq. (7), considering it as a 2-D dynamical system.
Through defining
The Hamiltonian for system (36) can be expressed as follows:
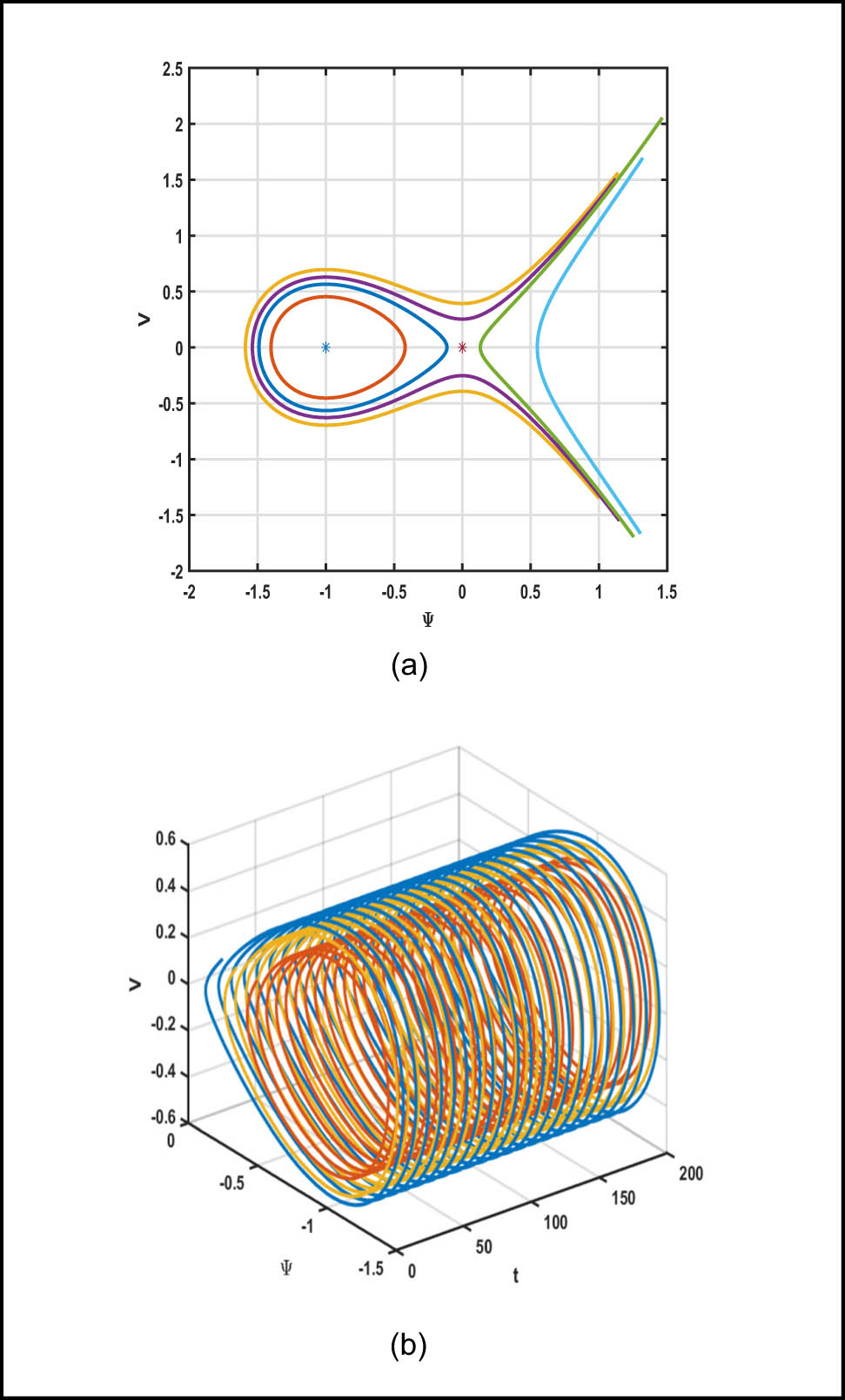
By employing analysis of vector fields in 2D dynamics, one can investigate the system’s (36) phase path. The phase trajectories of (36) vary depending on the selected nonzero parameters
To compute the Jacobian matrix of system (36), the following method can be utilized:
By analyzing the equilibria
Setting the parameters of system (36) to fixed values leads to different classifications of the equilibrium points under various cases:
Case 1: With

The 2D (a) and 3D (b) phase orbits for case 1 are displayed. Equilibria are in star symbols, where
Case 2: With
The 2D (a) and 3D (b) phase orbits for case 2 are displayed. Equilibria are in star symbols, where
Case 3: With

The 2D (a) and 3D (b) phase orbits for case 3 are displayed. Equilibria are in star symbols, where
Case 4: With

The 2D (a) and 3D (b) phase orbits for case 4 are displayed. Equilibria are in star symbols, where
Figure 10(a) and (b) respectively display the maximum Lyapunov exponents when different initial conditions are taken. The initial values for Figure 10(a) is (1, 0.4), while for Figure 10(b), it is (

The maximum Lyapunov exponent when taking different initial values. For (a)
In the physical research of the GHRWE model, Figures 6–10 hold crucial significance. Figures 6–9 illustrate the classification of the system’s equilibrium points and the situations of the phase trajectories under different parameter settings. The existence of centers and saddle points reflects the different dynamic characteristics of the system under various parameter combinations. In the field of elasticity mechanics, this corresponds to the stable and unstable states of the hyperelastic rod under different loading and material parameter conditions. For example, in practical engineering, for flexible components such as the deployable arms and antennas of satellites, during different stages like launch, orbital operation, and working, the internal stress and strain distributions will change continuously. The analysis of the equilibrium points and phase trajectories in the GHRWE model can be analogized to the mechanical responses of these components under different working conditions, helping engineers understand their stability and potential deformation trends.
Figure 10, through the analysis of the maximum Lyapunov exponent, shows that the system is stable at the center, which provides a quantitative basis for judging the stability of the system at a specific point. When studying the wave propagation of the hyperelastic rod, a stable point means that the wave can propagate continuously and regularly in this state without sudden changes or instability. From an energy perspective, at the stable point, the transfer and distribution of energy are relatively balanced, while near the unstable points (such as around the saddle points), rapid changes and redistribution of energy will occur, which is closely related to the conversion of internal energy and wave propagation when the hyperelastic rod is under force. Taken together, these figures provide intuitive and crucial physical information for a deep understanding of the dynamic behavior of the hyperelastic rod described by the GHRWE model in elasticity mechanics, and contribute to predicting and optimizing the performance of hyperelastic materials in practical applications.
3.4 Sensitivity analysis with respect to initials
We explore how Eq. (36) reacts to changes in the initial value by examining the scenarios outlined in cases 1 and case 2. The outcomes are illustrated in Figure 11(a) and (b) with the system settings

Sensitivity analysis for case 1: (a) time series and (b) phase orbits.

Sensitivity analysis for case 2: (a) time series and (b) phase orbits.
By studying trajectories from several initial setups, the effect of sensitivity can be assessed. This behavior is clearly demonstrated by the difference observed in Figures 11(a) and (b) and 12(a) and (b), where the blue and red curves are shown. The results clearly demonstrate that significant changes in the initial conditions profoundly affect the system’s behavior, provided that all other parameters remain constant.
Our research further explored how variations in parameters affect the system. This analysis is demonstrated by comparing Figures 11(a) and (b) with Figure 12(a) and (b). The findings reveal that the dynamic system is highly responsive to parameter variations, suggesting that even minor modifications can lead to considerable effects on the system’s performance.
Figures 11 and 12 display the time series and phase trajectories of the GHRWE model under different initial conditions. Their physical significance lies in revealing the sensitivity of the system to initial values. By comparing the curves under different initial conditions, it is clearly shown that a slight change in the initial values can significantly affect the system behavior. This is closely related to the fact that in practice, differences in the initial states of the hyperelastic rod lead to different dynamic responses. It provides a crucial basis for analyzing the mechanical properties of the hyperelastic rod described by the GHRWE model, such as the influence of different states at the initial stage of loading on subsequent fluctuations and stability.
3.5 Analysis of chaos
The interpretation of chaotic behaviors primarily revolves around the system’s unpredictable nature and extreme sensitivity to initial conditions over long time scales. This behavior arises from complex interactions within nonlinear dynamical systems, where even though the system follows deterministic mathematical rules, its behavior can exhibit seemingly random characteristics. The unpredictability in chaotic systems makes long-term prediction highly challenging, although short-term predictions remain feasible to some extent. Grasping the dynamic behaviors of system (7) is crucial. At this point, we thoroughly explores how Eq. (36) reacts to noise perturbations and evaluates its manifestation of chaotic behavior. The study utilizes the model below: Grasping the dynamic behaviors of system (7) is crucial. At this point, we thoroughly explores how Eq. (36) reacts to noise perturbations and evaluates its manifestation of chaotic behavior. The study utilizes the model below:
To conduct the chaos evaluation, we will explore how sensitivity to noise varies from two angles. The analysis will concentrate on the variable
First, let us analyze how the amplitude parameter affects Eq. (36) with the frequency while keeping the frequency constant. Figure 13(a) and (b) present the simulation results, providing insights into how variations in the amplitude

Chaotic analysis for case 1: (a) the time series and (b) the phase orbits.
Next, the effect of the frequency parameter

In case 1, we examine the chaotic behavior of the system. (a) the time series and (b) the phase plot.
Under the same experimental conditions as in case 1, starting from (0.25, 0.2), Figure 13(a) and (b) analyze the system’s response with a fixed frequency of
The impact of frequency
Figures 13 and 14 are used to analyze the chaotic behavior of the GHRWE model. By changing the amplitude and the frequency of the noise perturbation, they present the changes in the time series and phase trajectories of the system under different parameters. Their physical significance lies in revealing the sensitivity of the system to noise and the characteristics of chaotic dynamics. This helps to understand the uncertainty and complexity of the dynamic behavior of the hyperelastic rod in complex and disturbed real-world environments, such as when it is subjected to external random forces. It provides an important reference for studying the mechanical properties of the hyperelastic rod described by the GHRWE model under nonideal conditions.
3.6 Numerical results
In the realm of numerical analysis, the derivation of numerical solutions can be approached through various methodologies. One such approach is to furnish approximate analytical solutions, which are often derived through sophisticated decomposition techniques. Notably, the adomian decomposition method (ADM) and its variant, the modified adomian decomposition method, are frequently employed for this purpose. In addition, the reduced differential transform method and the residual power series method are also recognized for their efficacy in yielding approximate solutions. For a comprehensive discourse on these approximate solutions, the reader is directed to the relevant literature [57–60].
Conversely, an alternative strategy involves the direct computation of numerical results. In the present study, we have opted to employ the Chebyshev spectral collocation method to obtain the numerical results. This method is chosen for its demonstrated accuracy and efficiency in approximating solutions to differential equations.
In this part, we will verify the analytical results that were obtained in the previous part with the Chebyshev spectral collocation method. The Chebyshev nodes we used in this part are
where
By combining the representation form of
The initial and boundary conditions are constrained by the exact solution
At each step of the iteration process, we have
where
During the iteration process, we set the starting numerical solution is
Numerical results for case one:
Table 1 and Figure 14 present the comparison between the analytical results and the numerical results. From Table 1 and Figure 14(a), the numerical solutions with the method we proposed are in excellent agreement with the analytical solutions. Figure 14(b) shows the comparison between the numerical results and the analytical results when the variable
Comparison between the numerical solution
|
|
|
|
|
|---|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 0.2 |
|
|
|
| 0.6 |
|
|
|
| 1.0 |
|
|
|
| 1.4 |
|
|
|
| 1.8 |
|
|
|
Numerical results for case two:
![Figure 15
(a) The absolute error between numerical and analytical results of
U
4
(
x
,
t
)
{U}_{4}\left(x,t)
, where
x
∈
[
−
2
,
2
]
x\in \left[-2,2]
and
t
∈
[
0
,
2
]
t\in \left[0,2]
and (b)
∣
U
4
(
x
,
t
)
∣
| {U}_{4}\left(x,t)|
and
∣
U
ˆ
4
(
x
,
t
)
∣
| {\hat{U}}_{4}\left(x,t)|
at
t
=
1.2
t=1.2
, where
x
∈
[
−
2
,
2
]
x\in \left[-2,2]
.](/document/doi/10.1515/phys-2025-0183/asset/graphic/j_phys-2025-0183_fig_015.jpg)
(a) The absolute error between numerical and analytical results of
Table 2 and Figure 15 present the comparison between the analytical results
Comparison between the numerical solution
|
|
|
|
|
|---|---|---|---|
|
|
0.902897235 | 0.902897238 |
|
|
|
0.634193693 | 0.634193759 |
|
|
|
0.38032516 | 0.380325155 |
|
|
|
0.158580563 | 0.158580339 |
|
|
|
|
|
|
| 0.1 |
|
|
|
| 0.3 |
|
|
|
| 0.5 |
|
|
|
| 0.7 | 0.012853578 | 0.012853252 |
|
| 0.9 | 0.195003973 | 0.195003957 |
|
![Figure 16
(a) The absolute error between numerical and analytical results of
U
9
(
x
,
t
)
{U}_{9}\left(x,t)
, where
x
∈
[
−
1
,
1
]
x\in \left[-1,1]
and
t
∈
[
0
,
2
]
t\in \left[0,2]
and (b)
∣
U
9
(
x
,
t
)
∣
| {U}_{9}\left(x,t)|
and
∣
U
ˆ
9
(
x
,
t
)
∣
| {\hat{U}}_{9}\left(x,t)|
at
t
=
1.0
t=1.0
, where
x
∈
[
−
1
,
1
]
x\in \left[-1,1]
.](/document/doi/10.1515/phys-2025-0183/asset/graphic/j_phys-2025-0183_fig_016.jpg)
(a) The absolute error between numerical and analytical results of
4 Conclusions
4.1 The overall advantages of this article
The method employed in our study, which combines the Hamiltonian structure and modified
First and foremost, our approach provides a comprehensive and systematic framework for examining the GHRWE. Traditionally, constructing a Hamiltonian framework for Eq. (5) within the context of GHRWE has been deemed infeasible. However, drawing from our pioneering work, we have successfully employed the trial equation technique to modify Eq. (5), resulting in an equivalent formulation, Eq. (7), which is a novel approach not previously addressed in the literature [42–44]. This modification is not just a theoretical advancement; it is a practical one as well. By establishing a Hamiltonian framework, we can tap into the rich body of knowledge that Hamiltonian mechanics provides, particularly regarding the principle of energy conservation. This principle allows us to analyze the dynamics of the system with precision, focusing on the trajectories of energy within the system. This approach not only enhances our understanding of the underlying dynamics but also equips professionals with a valuable tool for assessing energy-related aspects of their specific challenges. Furthermore, it opens up new avenues for research, as it offers a structured way to study the complex interplay of fractal and chaotic dynamics within the GHRWE, which is critical for understanding the full spectrum of nonlinear phenomena present in such systems.
Secondly, we have employed the modified
Building upon our exploration of the impact of different fractional-order derivative forms on solutions, our research delves into the nuances that these derivatives introduce to the system’s dynamics. Fractional calculus, which deals with integrals and derivatives of noninteger order, has gained increasing recognition for its ability to model complex systems with memory and nonlocality effects that traditional integer-order calculus cannot fully capture. Our comparative analysis has revealed how these fractional derivatives, with their inherent nonlocal properties, can significantly alter the system’s behavior, particularly in the context of nonlinear phenomena and soliton propagation. This insight is crucial for advancing our understanding of complex systems, as it allows us to account for the long-term dependencies and hereditary properties that are often present in real-world applications. By doing so, our work not only fills a gap in the existing literature [42–44] but also paves the way for more sophisticated modeling techniques that can better predict and control system transitions and instabilities within the GHRWE. This enhanced predictive capability is a significant stride towards managing the intricacies of nonlinear dynamics in practical applications.
Finally, we have particularly emphasized the importance of verifying the accuracy of our analytical solutions to the equation. To this end, we have employed the Chebyshev spectral collocation method, which is renowned for its high precision and numerical stability. Through this method, we have conducted a detailed comparison between the partial analytical solutions obtained in the previous section and the numerical solutions. We calculated the errors between the two. The results show that the errors between our analytical solutions and numerical solutions are extremely small, which verifies the high precision of our analytical solutions. This finding not only confirms the effectiveness of our method but also provides a solid foundation for subsequent theoretical research and practical applications. Moreover, this high-precision verification process itself is a highlight of this study, demonstrating the potential and reliability of our method in dealing with nonlinear complex dynamic systems.
4.2 Underlying shortcomings of this article
Although this article boasts numerous benefits, it comes with specific constraints that users should consider for its practical use.
A significant limitation lies in the complexity of the mathematical model we employ. Utilizing the Hamiltonian alongside the modified
Another consideration is the computational intensity associated with numerical simulations. Depending on the problem’s complexity and the available computing resources, running simulations can be time consuming and resource–intensive. Engineers and researchers should be prepared for this aspect and allocate sufficient computational resources accordingly.
The computational demands of numerical modeling are also a factor to consider. The time and resources required for simulations can vary significantly with the intricacy of the problem and the computational assets at hand. It is crucial for professionals to anticipate this and ensure they have adequate computational capacity for their needs.
Summing up, our technique presents a robust and adaptable framework for examining GHRWE, excelling in energy preservation, evaluating the stability of critical points, and deriving wave solutions. Although it might entail complexity and computational effort, its practical value is underscored by its capacity to shed light on system dynamics, stability, and soliton dynamics. We anticipate that this overview of the method’s advantages and limitations will guide readers in effectively harnessing it for their own challenges across various fields.
4.3 Achievements and future outlook
In our research, we have successfully implemented the enhanced
Our research methodology has not only achieved a theoretical breakthrough but also demonstrated its unique value in practical applications. Compared to the previous studies, our method shows clear advantages and innovativeness in the following aspects:
Establishment of the Hamiltonian framework: In the study of nonlinear dynamics, the establishment of a Hamiltonian framework has always been a challenge. By applying the trial equation method, we have successfully transformed Eq. (5) into a new form suitable for Hamiltonian analysis, which has not been attempted in previous studies [42– 44].
Precise verification of analytical solutions: We have emphasized the importance of validating the precision of our analytical solutions for the equation. By harnessing the power of the Chebyshev spectral collocation method, an approach celebrated for its exceptional accuracy and numerical robustness, we have meticulously compared the partial analytical solutions derived in the preceding sections with their numerical counterparts, quantifying the discrepancies between them. The findings reveal that the discrepancies are minuscule, thereby affirming the high fidelity of our analytical solutions.
Through these comparisons, it is evident that our research provides not only new perspectives and methods on a theoretical level but also demonstrates significant potential and reliability in practical applications. Our work not only fills the gaps in the existing literature but also offers new directions and tools for future research, which is of great importance in advancing scientific inquiry and the discovery of new knowledge.
We have underscored the critical role of validating the precision of our analytical solutions for the equation. To achieve this, we have harnessed the power of the Chebyshev spectral collocation method, an approach celebrated for its exceptional accuracy and numerical robustness. By utilizing this technique, we have meticulously compared the partial analytical solutions derived in the preceding sections with their numerical counterparts, quantifying the discrepancies between them. The findings reveal that the discrepancies are minuscule, thereby affirming the high fidelity of our analytical solutions.
This significant outcome not only substantiates the efficacy of our methodology but also lays a robust groundwork for future theoretical explorations and practical implementations. The meticulous verification process itself is a notable accomplishment of this research, underscoring the method’s potential and dependability in addressing the complexities of nonlinear dynamic systems. By extending the scope of our investigation, we have not only enriched the theoretical understanding of the GHRWE but also provided a powerful analytical tool that can be applied to a broader spectrum of nonlinear dynamical systems. Our findings not only deepen the comprehension of GHRWE but also demonstrate the applicability and effectiveness of our analytical method in dealing with complex nonlinear phenomena. These results contribute new perspectives and potential applications to the ongoing discourse in the field, potentially stimulating further developments in related areas of research. This work stands as a testament to the importance of innovative methodologies in pushing the boundaries of scientific inquiry and underscores the value of interdisciplinary approaches in the pursuit of new knowledge. Our research not only offers in-depth theoretical insights into GHRWE but also provides a reliable analytical framework for the study of nonlinear dynamics through precise analytical solutions and numerical validation.
In our forthcoming research, we are contemplating the extension of the polynomial in Eq. (16) to a rational function format:
where the coefficients
-
Funding information: The work presented in this article was supported by the scientific research project of Shanghai Dianji University (23B0405).
-
Author contributions: Hongwei Ma: writing – original draft, validation, supervision, writing – review, editing. Ziming Liu: formal analysis, method-conclusion. Yiqun Sun: writing – original draft. Peng Guo: conceptualization, supervision. Jianming Qi: writing – review, editing. All authors have accepted responsibility for the entire content of this manuscript and approved its submission.
-
Conflict of interest: The authors state no conflict of interest.
-
Data availability statement: Data sharing is not applicable to this article as no data sets were generated or analyzed during the current study.
References
[1] Iqbal MS, Seadawy AR, Baber MZ, Qasim M. Application of modified exponential rational function method to Jaulent-Miodek system leading to exact classical solutions. Chaos Soliton Fract. 2022;164:112600. 10.1016/j.chaos.2022.112600Search in Google Scholar
[2] Iqbal MS, Seadawy AR, Baber MZ. Demonstration of unique problems from Soliton solutions to nonlinear Selkov-Schnakenberg system. Chaos Soliton Fract. 2022;162:112485. 10.1016/j.chaos.2022.112485Search in Google Scholar
[3] Tajadodi H, Khan ZA, Irshad AR, Gómez-Aguilar JF, Khan A, Khan H. Exact solutions of conformable fractional differential equations. Results Phys. 2021;22:103916. 10.1016/j.rinp.2021.103916Search in Google Scholar
[4] Kaplan M, Butt AR, Thabet H, Akbulut A, Raza N, Kumar D. An effective computational approach and sensitivity analysis to pseudo-parabolic-type equations. Wave Random Complex. 2021;34(5):4172–86. 10.1080/17455030.2021.1989081Search in Google Scholar
[5] Az-Zo’bi EA, Akinyemi L, Alleddawi AO. Construction of optical solitons for conformable generalized model in nonlinear media. Mod Phys Lett B. 2021;35:2150409. 10.1142/S0217984921504091Search in Google Scholar
[6] Az-Zo’bi EA, Dawoud KA, Marashdeh M. Numeric-analytic solutions of mixed-type systems of balance laws. Appl Math Comput. 2015;265:133–43. 10.1016/j.amc.2015.04.119Search in Google Scholar
[7] Inc M, Az-Zo’bi EA, Jhangeer A, Rezazadeh H, Ali MN, Kaabar MKA. New soliton solutions for the higher-dimensional non-local Ito equation. Nonlinear Eng. 2021;10(1):374–84. 10.1515/nleng-2021-0029Search in Google Scholar
[8] Iqbal M, Alam MN, Lu D, Seadawy A, Alsubaie NE, Ibrahim S. On the exploration of dynamical optical solitons to the modify unstable nonlinear Schrödinger equation arising in optical fbers. Opt Quantum Electron. 2024;56:765. 10.1007/s11082-024-06468-7Search in Google Scholar
[9] Taghizadeh N, Mirzazadeh M. The direct algebraic method to complex nonlinear partial differential equations. Int J Appl Math Comput. 2013;5(3):12–6. Search in Google Scholar
[10] Sulaiman TA, Bulut H, Yokus A, Baskonus HM. On the exact and numerical solutions to the coupled Boussinesq equation arising in ocean engineering. Indian J Phys. 2019;93:647–56. 10.1007/s12648-018-1322-1Search in Google Scholar
[11] Hirota R. The direct method in soliton theory. CUP. 2004;155:1–200. 10.1017/CBO9780511543043Search in Google Scholar
[12] Seadawy AR, Younis M, Baber MZ, Rizvi STR, Iqbal MS. Diverse acoustic wave propagation to confirmable time-space fractional KP equation arising in dusty plasma. Commun Theor Phys. 2021;73(11):115004. 10.1088/1572-9494/ac18bbSearch in Google Scholar
[13] Soliman AA. The modified extended direct algebraic method for solving nonlinear partial differential equations. Int J Nonlinear Sci. 2008;6(2):136–44. Search in Google Scholar
[14] Cheemaa N, Younis M. New and more general traveling wave solutions for nonlinear Schrödinger equation. Wave Random Complex. 2016;26(1):30–41. 10.1080/17455030.2015.1099761Search in Google Scholar
[15] Yao SW, Behera S, Inc M, Rezazadeh H, Virdi JPS, Mahmoud W, et al. Analytical solutions of conformable Drinfelad-Sokolov-Wilson and Boiti Leon Pempinelli equations via sine-cosine method. Results Phys. 2022;42:105990. 10.1016/j.rinp.2022.105990Search in Google Scholar
[16] Feng Q. A new approach for seeking coefficient function solutions of conformable fractional partial differential equations based on the Jacobi elliptic equation. Chin J Phys. 2018;56(6):2817–28. 10.1016/j.cjph.2018.08.006Search in Google Scholar
[17] Cohen D, Raynaud X. Geometric finite difference schemes for the generalized hyperelastic-rod wave equation. J Comput Appl Math. 2011;235(8):1925–40. 10.1016/j.cam.2010.09.015Search in Google Scholar
[18] Tian C, Yan W, Zhang H. The Cauchy problem for the generalized hyperelastic rod wave equation. Math Nachr. 2014;287(17–18):2116–37. 10.1002/mana.201200243Search in Google Scholar
[19] Lv N, Li J, Yuan X, Wang R. Controllable rogue waves in a compressible hyperelastic plate. Phys Lett A. 2023;461:128639. 10.1016/j.physleta.2023.128639Search in Google Scholar
[20] Demray ŞT. Solutions for KMM System and generalized hyperelastic-rod wave equation. OKÜ Fen Bil. Ens. Dergisi. 2022;5(3):1690–703. 10.47495/okufbed.1164007Search in Google Scholar
[21] Novruzov E, Bayrak V. Blow-up criteria for a two-component nonlinear dispersive wave system. J Funct Anal. 2022;282(12):109454. 10.1016/j.jfa.2022.109454Search in Google Scholar
[22] Houwe A, Abbagari S, Akinyemi L, Saliou Y, Justin M, Doka SY. Modulation instability, bifurcation analysis and solitonic waves in nonlinear optical media with odd-order dispersion. Phys Lett A. 2023;488:129134. 10.1016/j.physleta.2023.129134Search in Google Scholar
[23] Akinyemi L, Houwe A, Abbagari S, Wazwaz AM, Alshehri HM, Osman MS. Effects of the higher-order dispersion on solitary waves and modulation instability in a monomode fiber. Optik. 2023;288:171202. 10.1016/j.ijleo.2023.171202Search in Google Scholar
[24] Mathanaranjan T, Hashemi MS, Rezazadeh H, Akinyemi L, Bekir A. Chirped optical solitons and stability analysis of the nonlinear Schrödinger equation with nonlinear chromatic dispersion. Commun Theor Phys. 2023;75(8):085005. 10.1088/1572-9494/ace3b0Search in Google Scholar
[25] Akinyemi L, Rezazadeh H, Yao SW, Akbar MA, Khater MMA, Jhangeer A, et al. Nonlinear dispersion in parabolic law medium and its optical solitons. Results Phys. 2021;26:104411. 10.1016/j.rinp.2021.104411Search in Google Scholar
[26] Debin K, Rezazadeh H, Ullah N, Vahidi J, Tariq KU, Akinyemi L. New soliton wave solutions of a (2+1)-dimensional Sawada-Kotera equation. 2023;8(5):527–32. 10.1016/j.joes.2022.03.007Search in Google Scholar
[27] Wazwaz AM, Kaur L. Optical solitons and Peregrine solitons for nonlinear Schrödinger equation by variational iteration method. Optik. 2019;179:804–9. 10.1016/j.ijleo.2018.11.004Search in Google Scholar
[28] Wazwaz AM, Kaur L. Optical solitons for nonlinear Schrödinger (NLS) equation in normal dispersive regimes. Optik. 2019;184:428–35. 10.1016/j.ijleo.2019.04.118Search in Google Scholar
[29] Kaur L, Wazwaz AM. Bright-dark optical solitons for Schrödinger-Hirota equation with variable coefficients. Optik. 2019;179:479–84. 10.1016/j.ijleo.2018.09.035Search in Google Scholar
[30] Wazwaz AM, Kaur L. New integrable Boussinesq equations of distinct dimensions with diverse variety of soliton solutions. Nonlinear Dyn. 2019;97:83–94. 10.1007/s11071-019-04955-1Search in Google Scholar
[31] Raut S, Saha S, Das AN, Talukder P. Complete discrimination system method for finding exact solutions, dynamical properties of combined Zakharsov-Kuznetsov-modified Zakarsov-Kuznetsov equation. Alex Eng J. 2023;76:247–57. 10.1016/j.aej.2023.06.020Search in Google Scholar
[32] Raut S, Barman R, Sarkar T. Integrability, breather, lump and quasi-periodic waves of non-autonomous Kadomtsev-Petviashvili equation based on Bell-polynomial approach. Wave Motion. 2023;119:103125. 10.1016/j.wavemoti.2023.103125Search in Google Scholar
[33] Raut S, Ma WX, Barman R, Roy S. A non-autonomous Gardner equation and its integrability: Solitons, positons and breathers. Chaos Soliton Fract. 2023;176:114089. 10.1016/j.chaos.2023.114089Search in Google Scholar
[34] Raut S, Roy S, Saha S, Saha S, Das AN. Effect of kinematic viscosity on ion acoustic waves in superthermal plasma comprising cylindrical and spherical geometry. Int J Appl Comput Math. 2022;8(4):196. 10.1007/s40819-022-01418-xSearch in Google Scholar
[35] Roy S, Raut S, Kairi RR, Chatterjee P. Bilinear Bäcklund, Lax pairs, breather waves, lump waves and soliton interaction of (2+1)-dimensional non-autonomous Kadomtsev-Petviashvili equation. Nonlinear Dyn. 2023;111(6):5721–41. 10.1007/s11071-022-08126-7Search in Google Scholar
[36] Sarkar T, Roy S, Raut S, Mali PC. Studies on the dust acoustic shock, solitary, and periodic waves in an unmagnetized viscous dusty plasma with two-temperature ions. Braz J Phys. 2023;53(1):12. 10.1007/s13538-022-01221-5Search in Google Scholar
[37] Mahdy AMS. Stability, existence, and uniqueness for solving fractional glioblastoma multiforme using a Caputo-Fabrizio derivative. Math Meth Appl Sci. 2025;48(7):7360–77. 10.1002/mma.9038Search in Google Scholar
[38] Morales-Delgado VF, Gómez-Aguilar JF, Escobar-Jiménez RF, Taneco-Hernández MA. Fractional conformable derivatives of Liouville-Caputo type with low-fractionality. Phys A. 2018;503:424–38. 10.1016/j.physa.2018.03.018Search in Google Scholar
[39] Pérez JES, Gómez-Aguilar JF, Baleanu D, Tchier F. Chaotic attractors with fractional conformable derivatives in the Liouville-Caputo sense and its dynamical behaviors. Entropy-Switz. 2018;20(5):384. 10.3390/e20050384Search in Google Scholar PubMed PubMed Central
[40] Yépez-Martínez H, Gómez-Aguilar J F, Atangana A. First integral method for non-linear differential equations with conformable derivative. Math. Model. Nat Phenom. 2018;13(1):14. 10.1051/mmnp/2018012Search in Google Scholar
[41] Yao SW, Shahzad T, Ahmed MO, Baber MZ, Iqbal MS, Inc M. Extraction of soliton solutions for the time-space fractional order nonclassical Sobolev-type equation with unique physical problems. Results Phys. 2023;45:106256. 10.1016/j.rinp.2023.106256Search in Google Scholar
[42] Shahzad T, Ahmad MO, Baber MZ, Ahmed N, Ali SM, Akgül A, et al. Extraction of soliton for the confirmable time-fractional nonlinear Sobolev-type equations in semiconductor by phi6-modal expansion method. Results Phys. 2023;46:106299. 10.1016/j.rinp.2023.106299Search in Google Scholar
[43] Simbanefayi I, Gandarias ML, Khalique CM. Travelling wave solutions, symmetry reductions and conserved vectors of a generalized hyper-elastic rod wave equation. Partial Differ Equ Appl Math. 2023;7:100501. 10.1016/j.padiff.2023.100501Search in Google Scholar
[44] Shahzad T, Ahmad MO, Baber MZ, Ahmed M, Akgül A, Abdeljawad T, et al. Explicit solitary wave structures for the fractional-order Sobolev-type equations and their stability analysis. Alex Eng J. 2024;92:24–38. 10.1016/j.aej.2024.02.032Search in Google Scholar
[45] Han TY, Li Z, Li CY. Bifurcation analysis, stationary optical solitons and exact solutions for generalized nonlinear Schrödinger equation with nonlinear chromatic dispersion and quintuple power-law of refractive index in optical fibers. Phys A. 2023;615:128599. 10.1016/j.physa.2023.128599Search in Google Scholar
[46] Han TY, Jiang YY, Lyu JJ. Chaotic behavior and optical soliton for the concatenated model arising in optical communication. Results Phys. 2024;58:107467. 10.1016/j.rinp.2024.107467Search in Google Scholar
[47] Qiii JM, Cui QH, Bai LQ, Sun YQ. Investigating exact solutions, sensitivity, and chaotic behavior of multi-fractional order stochastic Davey-Sewartson equations for hydrodynamics research applications. Chaos Soliton Fract. 2024;180:114491. 10.1016/j.chaos.2024.114491Search in Google Scholar
[48] Qi JM, Wang X, Sun YQ. Investigating bifurcation and Chaos in lossy electrical transmission line models with Hamiltonian dynamics. Nonlinear Dyn. 2024;112:17551–84. 10.1007/s11071-024-09981-2Search in Google Scholar
[49] Altawallbeh Z, Az-Zo’bi E, Alleddawi OA, Šenol M, Akinyemi L Novel liquid crystals model and its nematicons. Opt Quantum Electron. 2022;54:861. 10.1007/s11082-022-04279-2Search in Google Scholar
[50] Alam MN. Exact solutions to the foam drainage equation by using the new generalized G′G-expansion method. Results Phys. 2015;5:168–77. 10.1016/j.rinp.2015.07.001Search in Google Scholar
[51] Shakeel M, Zafar A, Alameri A, Rehman MJU, Awrejcewicz J, Umer M, et al. Noval soliton solution, sensitivity and stability analysis to the fractional gKdV-ZK equation. Sci Rep. 2024;14:3770. 10.1038/s41598-024-51577-8Search in Google Scholar PubMed PubMed Central
[52] Saboor A, Shakeel M, Liu X, Zafar A, Ashraf M. A comparative study of two fractional nonlinear optical model via modifed G′G2-expansion method. Opt Quantum Electron. 2024;56:259. 10.1007/s11082-023-05824-3Search in Google Scholar
[53] Alam MN, Rahman MA. Study of the parametric effect of the wave profiles of the time-space fractional soliton neuron model equation arising in the topic of neuroscience. Partial Differ Equ Appl Math. 2024;12:100985. 10.1016/j.padiff.2024.100985Search in Google Scholar
[54] Alam MN, Iqbal M, Hassan M, Fayz-Al-Asad M, Hossain MS, Tunç C. Bifurcation, phase plane analysis and exact soliton solutions in the nonlinear Schrödinger equation with Atanganaas conformable derivative. Chaos Soliton Fract. 2024;182:114724. 10.1016/j.chaos.2024.114724Search in Google Scholar
[55] Ali AR, Alam MN, Parven MW. Unveiling optical soliton solutions and bifurcation analysis in the space-time fractional Fokas-Lenells equation via SSE approach. Sci Rep. 2024;14:2000. 10.1038/s41598-024-52308-9Search in Google Scholar PubMed PubMed Central
[56] Rosenstein MT, Collins JJ, Luca CJD. A practical method for calculating largest Lyapunov exponents from small data sets. Phys D. 1993;65(1–2):117–34. 10.1016/0167-2789(93)90009-PSearch in Google Scholar
[57] Az-Zo’bi EA. Construction of solutions for mixed hyperbolic elliptic Riemann initial value system of conservation laws. Appl Math Model. 2013;37(8):6018–24. 10.1016/j.apm.2012.12.006Search in Google Scholar
[58] Az-Zo’bi EA. On the reduced differential transform method and its application to the generalized Burgers-Huxley equation. Appl Math Sci. 2014;8:8823–31. 10.12988/ams.2014.410835Search in Google Scholar
[59] Az-Zo’bi EA. Exact analytic solutions for nonlinear diffusion equations via generalized residual power series method. Int J Math Comput Sci. 2019;14:69–78. Search in Google Scholar
[60] Az-Zo’bi EA. An approximate analytic solution for isentropic flow by an inviscid gas model. Arch Mech. 2014;66(3):203–12. Search in Google Scholar
[61] Weideman JA, Reddy SC. A matlab differentiation matrix suite. ACM TOMS. 2000;26:465–519. 10.1145/365723.365727Search in Google Scholar
[62] Trefethen LN. Spectral methods in MATLAB. SIAM: Tsinghua University Press; 2000. p. 1–160. 10.1137/1.9780898719598Search in Google Scholar
© 2025 the author(s), published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Research Articles
- Single-step fabrication of Ag2S/poly-2-mercaptoaniline nanoribbon photocathodes for green hydrogen generation from artificial and natural red-sea water
- Abundant new interaction solutions and nonlinear dynamics for the (3+1)-dimensional Hirota–Satsuma–Ito-like equation
- A novel gold and SiO2 material based planar 5-element high HPBW end-fire antenna array for 300 GHz applications
- Explicit exact solutions and bifurcation analysis for the mZK equation with truncated M-fractional derivatives utilizing two reliable methods
- Optical and laser damage resistance: Role of periodic cylindrical surfaces
- Numerical study of flow and heat transfer in the air-side metal foam partially filled channels of panel-type radiator under forced convection
- Water-based hybrid nanofluid flow containing CNT nanoparticles over an extending surface with velocity slips, thermal convective, and zero-mass flux conditions
- Dynamical wave structures for some diffusion--reaction equations with quadratic and quartic nonlinearities
- Solving an isotropic grey matter tumour model via a heat transfer equation
- Study on the penetration protection of a fiber-reinforced composite structure with CNTs/GFP clip STF/3DKevlar
- Influence of Hall current and acoustic pressure on nanostructured DPL thermoelastic plates under ramp heating in a double-temperature model
- Applications of the Belousov–Zhabotinsky reaction–diffusion system: Analytical and numerical approaches
- AC electroosmotic flow of Maxwell fluid in a pH-regulated parallel-plate silica nanochannel
- Interpreting optical effects with relativistic transformations adopting one-way synchronization to conserve simultaneity and space–time continuity
- Modeling and analysis of quantum communication channel in airborne platforms with boundary layer effects
- Theoretical and numerical investigation of a memristor system with a piecewise memductance under fractal–fractional derivatives
- Tuning the structure and electro-optical properties of α-Cr2O3 films by heat treatment/La doping for optoelectronic applications
- High-speed multi-spectral explosion temperature measurement using golden-section accelerated Pearson correlation algorithm
- Dynamic behavior and modulation instability of the generalized coupled fractional nonlinear Helmholtz equation with cubic–quintic term
- Study on the duration of laser-induced air plasma flash near thin film surface
- Exploring the dynamics of fractional-order nonlinear dispersive wave system through homotopy technique
- The mechanism of carbon monoxide fluorescence inside a femtosecond laser-induced plasma
- Numerical solution of a nonconstant coefficient advection diffusion equation in an irregular domain and analyses of numerical dispersion and dissipation
- Numerical examination of the chemically reactive MHD flow of hybrid nanofluids over a two-dimensional stretching surface with the Cattaneo–Christov model and slip conditions
- Impacts of sinusoidal heat flux and embraced heated rectangular cavity on natural convection within a square enclosure partially filled with porous medium and Casson-hybrid nanofluid
- Stability analysis of unsteady ternary nanofluid flow past a stretching/shrinking wedge
- Solitonic wave solutions of a Hamiltonian nonlinear atom chain model through the Hirota bilinear transformation method
- Bilinear form and soltion solutions for (3+1)-dimensional negative-order KdV-CBS equation
- Solitary chirp pulses and soliton control for variable coefficients cubic–quintic nonlinear Schrödinger equation in nonuniform management system
- Influence of decaying heat source and temperature-dependent thermal conductivity on photo-hydro-elasto semiconductor media
- Dissipative disorder optimization in the radiative thin film flow of partially ionized non-Newtonian hybrid nanofluid with second-order slip condition
- Bifurcation, chaotic behavior, and traveling wave solutions for the fractional (4+1)-dimensional Davey–Stewartson–Kadomtsev–Petviashvili model
- New investigation on soliton solutions of two nonlinear PDEs in mathematical physics with a dynamical property: Bifurcation analysis
- Mathematical analysis of nanoparticle type and volume fraction on heat transfer efficiency of nanofluids
- Creation of single-wing Lorenz-like attractors via a ten-ninths-degree term
- Optical soliton solutions, bifurcation analysis, chaotic behaviors of nonlinear Schrödinger equation and modulation instability in optical fiber
- Chaotic dynamics and some solutions for the (n + 1)-dimensional modified Zakharov–Kuznetsov equation in plasma physics
- Fractal formation and chaotic soliton phenomena in nonlinear conformable Heisenberg ferromagnetic spin chain equation
- Single-step fabrication of Mn(iv) oxide-Mn(ii) sulfide/poly-2-mercaptoaniline porous network nanocomposite for pseudo-supercapacitors and charge storage
- Novel constructed dynamical analytical solutions and conserved quantities of the new (2+1)-dimensional KdV model describing acoustic wave propagation
- Tavis–Cummings model in the presence of a deformed field and time-dependent coupling
- Spinning dynamics of stress-dependent viscosity of generalized Cross-nonlinear materials affected by gravitationally swirling disk
- Design and prediction of high optical density photovoltaic polymers using machine learning-DFT studies
- Robust control and preservation of quantum steering, nonlocality, and coherence in open atomic systems
- Coating thickness and process efficiency of reverse roll coating using a magnetized hybrid nanomaterial flow
- Dynamic analysis, circuit realization, and its synchronization of a new chaotic hyperjerk system
- Decoherence of steerability and coherence dynamics induced by nonlinear qubit–cavity interactions
- Finite element analysis of turbulent thermal enhancement in grooved channels with flat- and plus-shaped fins
- Modulational instability and associated ion-acoustic modulated envelope solitons in a quantum plasma having ion beams
- Statistical inference of constant-stress partially accelerated life tests under type II generalized hybrid censored data from Burr III distribution
- On solutions of the Dirac equation for 1D hydrogenic atoms or ions
- Entropy optimization for chemically reactive magnetized unsteady thin film hybrid nanofluid flow on inclined surface subject to nonlinear mixed convection and variable temperature
- Stability analysis, circuit simulation, and color image encryption of a novel four-dimensional hyperchaotic model with hidden and self-excited attractors
- A high-accuracy exponential time integration scheme for the Darcy–Forchheimer Williamson fluid flow with temperature-dependent conductivity
- Novel analysis of fractional regularized long-wave equation in plasma dynamics
- Development of a photoelectrode based on a bismuth(iii) oxyiodide/intercalated iodide-poly(1H-pyrrole) rough spherical nanocomposite for green hydrogen generation
- Investigation of solar radiation effects on the energy performance of the (Al2O3–CuO–Cu)/H2O ternary nanofluidic system through a convectively heated cylinder
- Quantum resources for a system of two atoms interacting with a deformed field in the presence of intensity-dependent coupling
- Studying bifurcations and chaotic dynamics in the generalized hyperelastic-rod wave equation through Hamiltonian mechanics
- A new numerical technique for the solution of time-fractional nonlinear Klein–Gordon equation involving Atangana–Baleanu derivative using cubic B-spline functions
- Interaction solutions of high-order breathers and lumps for a (3+1)-dimensional conformable fractional potential-YTSF-like model
- Hydraulic fracturing radioactive source tracing technology based on hydraulic fracturing tracing mechanics model
- Numerical solution and stability analysis of non-Newtonian hybrid nanofluid flow subject to exponential heat source/sink over a Riga sheet
- Numerical investigation of mixed convection and viscous dissipation in couple stress nanofluid flow: A merged Adomian decomposition method and Mohand transform
- Effectual quintic B-spline functions for solving the time fractional coupled Boussinesq–Burgers equation arising in shallow water waves
- Analysis of MHD hybrid nanofluid flow over cone and wedge with exponential and thermal heat source and activation energy
- Solitons and travelling waves structure for M-fractional Kairat-II equation using three explicit methods
- Impact of nanoparticle shapes on the heat transfer properties of Cu and CuO nanofluids flowing over a stretching surface with slip effects: A computational study
- Computational simulation of heat transfer and nanofluid flow for two-sided lid-driven square cavity under the influence of magnetic field
- Irreversibility analysis of a bioconvective two-phase nanofluid in a Maxwell (non-Newtonian) flow induced by a rotating disk with thermal radiation
- Hydrodynamic and sensitivity analysis of a polymeric calendering process for non-Newtonian fluids with temperature-dependent viscosity
- Exploring the peakon solitons molecules and solitary wave structure to the nonlinear damped Kortewege–de Vries equation through efficient technique
- Modeling and heat transfer analysis of magnetized hybrid micropolar blood-based nanofluid flow in Darcy–Forchheimer porous stenosis narrow arteries
- Activation energy and cross-diffusion effects on 3D rotating nanofluid flow in a Darcy–Forchheimer porous medium with radiation and convective heating
- Insights into chemical reactions occurring in generalized nanomaterials due to spinning surface with melting constraints
- Influence of a magnetic field on double-porosity photo-thermoelastic materials under Lord–Shulman theory
- Soliton-like solutions for a nonlinear doubly dispersive equation in an elastic Murnaghan's rod via Hirota's bilinear method
- Analytical and numerical investigation of exact wave patterns and chaotic dynamics in the extended improved Boussinesq equation
- Nonclassical correlation dynamics of Heisenberg XYZ states with (x, y)-spin--orbit interaction, x-magnetic field, and intrinsic decoherence effects
- Exact traveling wave and soliton solutions for chemotaxis model and (3+1)-dimensional Boiti–Leon–Manna–Pempinelli equation
- Unveiling the transformative role of samarium in ZnO: Exploring structural and optical modifications for advanced functional applications
- On the derivation of solitary wave solutions for the time-fractional Rosenau equation through two analytical techniques
- Analyzing the role of length and radius of MWCNTs in a nanofluid flow influenced by variable thermal conductivity and viscosity considering Marangoni convection
- Advanced mathematical analysis of heat and mass transfer in oscillatory micropolar bio-nanofluid flows via peristaltic waves and electroosmotic effects
- Exact bound state solutions of the radial Schrödinger equation for the Coulomb potential by conformable Nikiforov–Uvarov approach
- Some anisotropic and perfect fluid plane symmetric solutions of Einstein's field equations using killing symmetries
- Nonlinear dynamics of the dissipative ion-acoustic solitary waves in anisotropic rotating magnetoplasmas
- Curves in multiplicative equiaffine plane
- Exact solution of the three-dimensional (3D) Z2 lattice gauge theory
- Propagation properties of Airyprime pulses in relaxing nonlinear media
- Symbolic computation: Analytical solutions and dynamics of a shallow water wave equation in coastal engineering
- Wave propagation in nonlocal piezo-photo-hygrothermoelastic semiconductors subjected to heat and moisture flux
- Comparative reaction dynamics in rotating nanofluid systems: Quartic and cubic kinetics under MHD influence
- Laplace transform technique and probabilistic analysis-based hypothesis testing in medical and engineering applications
- Physical properties of ternary chloro-perovskites KTCl3 (T = Ge, Al) for optoelectronic applications
- Gravitational length stretching: Curvature-induced modulation of quantum probability densities
- The search for the cosmological cold dark matter axion – A new refined narrow mass window and detection scheme
- A comparative study of quantum resources in bipartite Lipkin–Meshkov–Glick model under DM interaction and Zeeman splitting
- PbO-doped K2O–BaO–Al2O3–B2O3–TeO2-glasses: Mechanical and shielding efficacy
- Nanospherical arsenic(iii) oxoiodide/iodide-intercalated poly(N-methylpyrrole) composite synthesis for broad-spectrum optical detection
- Sine power Burr X distribution with estimation and applications in physics and other fields
- Numerical modeling of enhanced reactive oxygen plasma in pulsed laser deposition of metal oxide thin films
- Dynamical analyses and dispersive soliton solutions to the nonlinear fractional model in stratified fluids
- Computation of exact analytical soliton solutions and their dynamics in advanced optical system
- An innovative approximation concerning the diffusion and electrical conductivity tensor at critical altitudes within the F-region of ionospheric plasma at low latitudes
- An analytical investigation to the (3+1)-dimensional Yu–Toda–Sassa–Fukuyama equation with dynamical analysis: Bifurcation
- Swirling-annular-flow-induced instability of a micro shell considering Knudsen number and viscosity effects
- Numerical analysis of non-similar convection flows of a two-phase nanofluid past a semi-infinite vertical plate with thermal radiation
- MgO NPs reinforced PCL/PVC nanocomposite films with enhanced UV shielding and thermal stability for packaging applications
- Optimal conditions for indoor air purification using non-thermal Corona discharge electrostatic precipitator
- Investigation of thermal conductivity and Raman spectra for HfAlB, TaAlB, and WAlB based on first-principles calculations
- Tunable double plasmon-induced transparency based on monolayer patterned graphene metamaterial
- DSC: depth data quality optimization framework for RGBD camouflaged object detection
- A new family of Poisson-exponential distributions with applications to cancer data and glass fiber reliability
- Numerical investigation of couple stress under slip conditions via modified Adomian decomposition method
- Monitoring plateau lake area changes in Yunnan province, southwestern China using medium-resolution remote sensing imagery: applicability of water indices and environmental dependencies
- Heterodyne interferometric fiber-optic gyroscope
- Exact solutions of Einstein’s field equations via homothetic symmetries of non-static plane symmetric spacetime
- A widespread study of discrete entropic model and its distribution along with fluctuations of energy
- Empirical model integration for accurate charge carrier mobility simulation in silicon MOSFETs
- The influence of scattering correction effect based on optical path distribution on CO2 retrieval
- Anisotropic dissociation and spectral response of 1-Bromo-4-chlorobenzene under static directional electric fields
- Role of tungsten oxide (WO3) on thermal and optical properties of smart polymer composites
- Analysis of iterative deblurring: no explicit noise
- The influence of anisotropy of InP on its elasticity and phonon properties
- Review Article
- Examination of the gamma radiation shielding properties of different clay and sand materials in the Adrar region
- Erratum
- Erratum to “On Soliton structures in optical fiber communications with Kundu–Mukherjee–Naskar model (Open Physics 2021;19:679–682)”
- Special Issue on Fundamental Physics from Atoms to Cosmos - Part II
- Possible explanation for the neutron lifetime puzzle
- Special Issue on Nanomaterial utilization and structural optimization - Part III
- Numerical investigation on fluid-thermal-electric performance of a thermoelectric-integrated helically coiled tube heat exchanger for coal mine air cooling
- Special Issue on Nonlinear Dynamics and Chaos in Physical Systems
- Analysis of the fractional relativistic isothermal gas sphere with application to neutron stars
- Abundant wave symmetries in the (3+1)-dimensional Chafee–Infante equation through the Hirota bilinear transformation technique
- Successive midpoint method for fractional differential equations with nonlocal kernels: Error analysis, stability, and applications
- Novel exact solitons to the fractional modified mixed-Korteweg--de Vries model with a stability analysis
Articles in the same Issue
- Research Articles
- Single-step fabrication of Ag2S/poly-2-mercaptoaniline nanoribbon photocathodes for green hydrogen generation from artificial and natural red-sea water
- Abundant new interaction solutions and nonlinear dynamics for the (3+1)-dimensional Hirota–Satsuma–Ito-like equation
- A novel gold and SiO2 material based planar 5-element high HPBW end-fire antenna array for 300 GHz applications
- Explicit exact solutions and bifurcation analysis for the mZK equation with truncated M-fractional derivatives utilizing two reliable methods
- Optical and laser damage resistance: Role of periodic cylindrical surfaces
- Numerical study of flow and heat transfer in the air-side metal foam partially filled channels of panel-type radiator under forced convection
- Water-based hybrid nanofluid flow containing CNT nanoparticles over an extending surface with velocity slips, thermal convective, and zero-mass flux conditions
- Dynamical wave structures for some diffusion--reaction equations with quadratic and quartic nonlinearities
- Solving an isotropic grey matter tumour model via a heat transfer equation
- Study on the penetration protection of a fiber-reinforced composite structure with CNTs/GFP clip STF/3DKevlar
- Influence of Hall current and acoustic pressure on nanostructured DPL thermoelastic plates under ramp heating in a double-temperature model
- Applications of the Belousov–Zhabotinsky reaction–diffusion system: Analytical and numerical approaches
- AC electroosmotic flow of Maxwell fluid in a pH-regulated parallel-plate silica nanochannel
- Interpreting optical effects with relativistic transformations adopting one-way synchronization to conserve simultaneity and space–time continuity
- Modeling and analysis of quantum communication channel in airborne platforms with boundary layer effects
- Theoretical and numerical investigation of a memristor system with a piecewise memductance under fractal–fractional derivatives
- Tuning the structure and electro-optical properties of α-Cr2O3 films by heat treatment/La doping for optoelectronic applications
- High-speed multi-spectral explosion temperature measurement using golden-section accelerated Pearson correlation algorithm
- Dynamic behavior and modulation instability of the generalized coupled fractional nonlinear Helmholtz equation with cubic–quintic term
- Study on the duration of laser-induced air plasma flash near thin film surface
- Exploring the dynamics of fractional-order nonlinear dispersive wave system through homotopy technique
- The mechanism of carbon monoxide fluorescence inside a femtosecond laser-induced plasma
- Numerical solution of a nonconstant coefficient advection diffusion equation in an irregular domain and analyses of numerical dispersion and dissipation
- Numerical examination of the chemically reactive MHD flow of hybrid nanofluids over a two-dimensional stretching surface with the Cattaneo–Christov model and slip conditions
- Impacts of sinusoidal heat flux and embraced heated rectangular cavity on natural convection within a square enclosure partially filled with porous medium and Casson-hybrid nanofluid
- Stability analysis of unsteady ternary nanofluid flow past a stretching/shrinking wedge
- Solitonic wave solutions of a Hamiltonian nonlinear atom chain model through the Hirota bilinear transformation method
- Bilinear form and soltion solutions for (3+1)-dimensional negative-order KdV-CBS equation
- Solitary chirp pulses and soliton control for variable coefficients cubic–quintic nonlinear Schrödinger equation in nonuniform management system
- Influence of decaying heat source and temperature-dependent thermal conductivity on photo-hydro-elasto semiconductor media
- Dissipative disorder optimization in the radiative thin film flow of partially ionized non-Newtonian hybrid nanofluid with second-order slip condition
- Bifurcation, chaotic behavior, and traveling wave solutions for the fractional (4+1)-dimensional Davey–Stewartson–Kadomtsev–Petviashvili model
- New investigation on soliton solutions of two nonlinear PDEs in mathematical physics with a dynamical property: Bifurcation analysis
- Mathematical analysis of nanoparticle type and volume fraction on heat transfer efficiency of nanofluids
- Creation of single-wing Lorenz-like attractors via a ten-ninths-degree term
- Optical soliton solutions, bifurcation analysis, chaotic behaviors of nonlinear Schrödinger equation and modulation instability in optical fiber
- Chaotic dynamics and some solutions for the (n + 1)-dimensional modified Zakharov–Kuznetsov equation in plasma physics
- Fractal formation and chaotic soliton phenomena in nonlinear conformable Heisenberg ferromagnetic spin chain equation
- Single-step fabrication of Mn(iv) oxide-Mn(ii) sulfide/poly-2-mercaptoaniline porous network nanocomposite for pseudo-supercapacitors and charge storage
- Novel constructed dynamical analytical solutions and conserved quantities of the new (2+1)-dimensional KdV model describing acoustic wave propagation
- Tavis–Cummings model in the presence of a deformed field and time-dependent coupling
- Spinning dynamics of stress-dependent viscosity of generalized Cross-nonlinear materials affected by gravitationally swirling disk
- Design and prediction of high optical density photovoltaic polymers using machine learning-DFT studies
- Robust control and preservation of quantum steering, nonlocality, and coherence in open atomic systems
- Coating thickness and process efficiency of reverse roll coating using a magnetized hybrid nanomaterial flow
- Dynamic analysis, circuit realization, and its synchronization of a new chaotic hyperjerk system
- Decoherence of steerability and coherence dynamics induced by nonlinear qubit–cavity interactions
- Finite element analysis of turbulent thermal enhancement in grooved channels with flat- and plus-shaped fins
- Modulational instability and associated ion-acoustic modulated envelope solitons in a quantum plasma having ion beams
- Statistical inference of constant-stress partially accelerated life tests under type II generalized hybrid censored data from Burr III distribution
- On solutions of the Dirac equation for 1D hydrogenic atoms or ions
- Entropy optimization for chemically reactive magnetized unsteady thin film hybrid nanofluid flow on inclined surface subject to nonlinear mixed convection and variable temperature
- Stability analysis, circuit simulation, and color image encryption of a novel four-dimensional hyperchaotic model with hidden and self-excited attractors
- A high-accuracy exponential time integration scheme for the Darcy–Forchheimer Williamson fluid flow with temperature-dependent conductivity
- Novel analysis of fractional regularized long-wave equation in plasma dynamics
- Development of a photoelectrode based on a bismuth(iii) oxyiodide/intercalated iodide-poly(1H-pyrrole) rough spherical nanocomposite for green hydrogen generation
- Investigation of solar radiation effects on the energy performance of the (Al2O3–CuO–Cu)/H2O ternary nanofluidic system through a convectively heated cylinder
- Quantum resources for a system of two atoms interacting with a deformed field in the presence of intensity-dependent coupling
- Studying bifurcations and chaotic dynamics in the generalized hyperelastic-rod wave equation through Hamiltonian mechanics
- A new numerical technique for the solution of time-fractional nonlinear Klein–Gordon equation involving Atangana–Baleanu derivative using cubic B-spline functions
- Interaction solutions of high-order breathers and lumps for a (3+1)-dimensional conformable fractional potential-YTSF-like model
- Hydraulic fracturing radioactive source tracing technology based on hydraulic fracturing tracing mechanics model
- Numerical solution and stability analysis of non-Newtonian hybrid nanofluid flow subject to exponential heat source/sink over a Riga sheet
- Numerical investigation of mixed convection and viscous dissipation in couple stress nanofluid flow: A merged Adomian decomposition method and Mohand transform
- Effectual quintic B-spline functions for solving the time fractional coupled Boussinesq–Burgers equation arising in shallow water waves
- Analysis of MHD hybrid nanofluid flow over cone and wedge with exponential and thermal heat source and activation energy
- Solitons and travelling waves structure for M-fractional Kairat-II equation using three explicit methods
- Impact of nanoparticle shapes on the heat transfer properties of Cu and CuO nanofluids flowing over a stretching surface with slip effects: A computational study
- Computational simulation of heat transfer and nanofluid flow for two-sided lid-driven square cavity under the influence of magnetic field
- Irreversibility analysis of a bioconvective two-phase nanofluid in a Maxwell (non-Newtonian) flow induced by a rotating disk with thermal radiation
- Hydrodynamic and sensitivity analysis of a polymeric calendering process for non-Newtonian fluids with temperature-dependent viscosity
- Exploring the peakon solitons molecules and solitary wave structure to the nonlinear damped Kortewege–de Vries equation through efficient technique
- Modeling and heat transfer analysis of magnetized hybrid micropolar blood-based nanofluid flow in Darcy–Forchheimer porous stenosis narrow arteries
- Activation energy and cross-diffusion effects on 3D rotating nanofluid flow in a Darcy–Forchheimer porous medium with radiation and convective heating
- Insights into chemical reactions occurring in generalized nanomaterials due to spinning surface with melting constraints
- Influence of a magnetic field on double-porosity photo-thermoelastic materials under Lord–Shulman theory
- Soliton-like solutions for a nonlinear doubly dispersive equation in an elastic Murnaghan's rod via Hirota's bilinear method
- Analytical and numerical investigation of exact wave patterns and chaotic dynamics in the extended improved Boussinesq equation
- Nonclassical correlation dynamics of Heisenberg XYZ states with (x, y)-spin--orbit interaction, x-magnetic field, and intrinsic decoherence effects
- Exact traveling wave and soliton solutions for chemotaxis model and (3+1)-dimensional Boiti–Leon–Manna–Pempinelli equation
- Unveiling the transformative role of samarium in ZnO: Exploring structural and optical modifications for advanced functional applications
- On the derivation of solitary wave solutions for the time-fractional Rosenau equation through two analytical techniques
- Analyzing the role of length and radius of MWCNTs in a nanofluid flow influenced by variable thermal conductivity and viscosity considering Marangoni convection
- Advanced mathematical analysis of heat and mass transfer in oscillatory micropolar bio-nanofluid flows via peristaltic waves and electroosmotic effects
- Exact bound state solutions of the radial Schrödinger equation for the Coulomb potential by conformable Nikiforov–Uvarov approach
- Some anisotropic and perfect fluid plane symmetric solutions of Einstein's field equations using killing symmetries
- Nonlinear dynamics of the dissipative ion-acoustic solitary waves in anisotropic rotating magnetoplasmas
- Curves in multiplicative equiaffine plane
- Exact solution of the three-dimensional (3D) Z2 lattice gauge theory
- Propagation properties of Airyprime pulses in relaxing nonlinear media
- Symbolic computation: Analytical solutions and dynamics of a shallow water wave equation in coastal engineering
- Wave propagation in nonlocal piezo-photo-hygrothermoelastic semiconductors subjected to heat and moisture flux
- Comparative reaction dynamics in rotating nanofluid systems: Quartic and cubic kinetics under MHD influence
- Laplace transform technique and probabilistic analysis-based hypothesis testing in medical and engineering applications
- Physical properties of ternary chloro-perovskites KTCl3 (T = Ge, Al) for optoelectronic applications
- Gravitational length stretching: Curvature-induced modulation of quantum probability densities
- The search for the cosmological cold dark matter axion – A new refined narrow mass window and detection scheme
- A comparative study of quantum resources in bipartite Lipkin–Meshkov–Glick model under DM interaction and Zeeman splitting
- PbO-doped K2O–BaO–Al2O3–B2O3–TeO2-glasses: Mechanical and shielding efficacy
- Nanospherical arsenic(iii) oxoiodide/iodide-intercalated poly(N-methylpyrrole) composite synthesis for broad-spectrum optical detection
- Sine power Burr X distribution with estimation and applications in physics and other fields
- Numerical modeling of enhanced reactive oxygen plasma in pulsed laser deposition of metal oxide thin films
- Dynamical analyses and dispersive soliton solutions to the nonlinear fractional model in stratified fluids
- Computation of exact analytical soliton solutions and their dynamics in advanced optical system
- An innovative approximation concerning the diffusion and electrical conductivity tensor at critical altitudes within the F-region of ionospheric plasma at low latitudes
- An analytical investigation to the (3+1)-dimensional Yu–Toda–Sassa–Fukuyama equation with dynamical analysis: Bifurcation
- Swirling-annular-flow-induced instability of a micro shell considering Knudsen number and viscosity effects
- Numerical analysis of non-similar convection flows of a two-phase nanofluid past a semi-infinite vertical plate with thermal radiation
- MgO NPs reinforced PCL/PVC nanocomposite films with enhanced UV shielding and thermal stability for packaging applications
- Optimal conditions for indoor air purification using non-thermal Corona discharge electrostatic precipitator
- Investigation of thermal conductivity and Raman spectra for HfAlB, TaAlB, and WAlB based on first-principles calculations
- Tunable double plasmon-induced transparency based on monolayer patterned graphene metamaterial
- DSC: depth data quality optimization framework for RGBD camouflaged object detection
- A new family of Poisson-exponential distributions with applications to cancer data and glass fiber reliability
- Numerical investigation of couple stress under slip conditions via modified Adomian decomposition method
- Monitoring plateau lake area changes in Yunnan province, southwestern China using medium-resolution remote sensing imagery: applicability of water indices and environmental dependencies
- Heterodyne interferometric fiber-optic gyroscope
- Exact solutions of Einstein’s field equations via homothetic symmetries of non-static plane symmetric spacetime
- A widespread study of discrete entropic model and its distribution along with fluctuations of energy
- Empirical model integration for accurate charge carrier mobility simulation in silicon MOSFETs
- The influence of scattering correction effect based on optical path distribution on CO2 retrieval
- Anisotropic dissociation and spectral response of 1-Bromo-4-chlorobenzene under static directional electric fields
- Role of tungsten oxide (WO3) on thermal and optical properties of smart polymer composites
- Analysis of iterative deblurring: no explicit noise
- The influence of anisotropy of InP on its elasticity and phonon properties
- Review Article
- Examination of the gamma radiation shielding properties of different clay and sand materials in the Adrar region
- Erratum
- Erratum to “On Soliton structures in optical fiber communications with Kundu–Mukherjee–Naskar model (Open Physics 2021;19:679–682)”
- Special Issue on Fundamental Physics from Atoms to Cosmos - Part II
- Possible explanation for the neutron lifetime puzzle
- Special Issue on Nanomaterial utilization and structural optimization - Part III
- Numerical investigation on fluid-thermal-electric performance of a thermoelectric-integrated helically coiled tube heat exchanger for coal mine air cooling
- Special Issue on Nonlinear Dynamics and Chaos in Physical Systems
- Analysis of the fractional relativistic isothermal gas sphere with application to neutron stars
- Abundant wave symmetries in the (3+1)-dimensional Chafee–Infante equation through the Hirota bilinear transformation technique
- Successive midpoint method for fractional differential equations with nonlocal kernels: Error analysis, stability, and applications
- Novel exact solitons to the fractional modified mixed-Korteweg--de Vries model with a stability analysis