On the derivation of solitary wave solutions for the time-fractional Rosenau equation through two analytical techniques
-
Nauman Ahmed
 ,
Siegfried Macías
,
Siegfried Macías

Abstract
An analytical study of the Rosenau equation, which is crucial for analyzing wave phenomena in a variety of physical systems where nonlinear dynamics and dispersion are significant, includes fluid dynamics, plasma physics, and materials science. This equation was proposed to explain the dynamic behavior of dense discrete systems. We employed the Sardar subequation approach and the generalized Riccati equation mapping method to derive analytical solutions. By applying the fractional wave transformation and the conformal fractional derivative, we were able to obtain these solutions. Using these techniques, we obtained a variety of solutions in the form of exponential, trigonometric, mixed hyperbolic, rational, and hyperbolic functions. The solutions include numerous solitary wave solutions, as well as bright and dark soliton solutions. By varying the parameter values, the analytical soliton solutions are further visualized through 2D, 3D, and contour plots using Mathematica 13.0.
1 Introduction
Nonlinear partial differential equations (NLPDEs) are powerful mathematical tools for modeling complex and uncertain natural processes. Many systems in fields, such as biology [1], engineering [2], and physics [3], rely on nonlinear effects and variables that cannot be adequately described by linear differential equations. NLPDEs are widely used in numerous scientific and industrial disciplines [4], including materials science [5], astronautics [6], reaction–diffusion systems [7], chaotic systems [8], medicine [9], fluid dynamics [10], and wave propagation equilibria [11]. Although NLPDEs model a vast number of physical phenomena, these phenomena can only be fully understood by obtaining their exact solutions [12]. Several analytical methods have been proposed in the literature, including the unified algebraic method [13], the modified subequation extended method [14], the modified Exp-function method [15], variational principles [16], the tanh–coth method [17], the generalized Kudryashov method [18], the new auxiliary equation method [19], the amplitude ansatz technique [20], the sinh-Gordon expansion method [21], the first integral method [22], and the Jacobi elliptic function method [23]. These dynamic approaches [24] have been developed to effectively solve NLPDEs.
On the other hand, ordinary fractional differential equations and, more generally, fractional partial differential equations (FPDEs) have gained significant attention due to their broad applications in fields such as fluid mechanics, biology, physics, and engineering [25]. Consequently, solving fractional ordinary differential equations [26], FPDEs, and integral equations [27] in real-world physical contexts has become a major focus. Research has shown that FPDEs are essential for describing a wide range of nonlinear natural and physical systems. In this context, the present study focuses on the nonlinear Rosenau equation [28]:
where
Definition 1.1
Assume
for all
The key properties of the conformable fractional derivative are summarized in the following.
Theorem 1.2
Let
If q is differentiable, then
Various numerical and analytical methods have been used to investigate the dynamics of different Rosenau equations. Park [28] investigated whether the Rosenau equation can be solved, and he definitely gave the exact answer. Chung and Ha [29] studied existence and uniqueness of the exact solutions, as well as the error estimates, using Galerkin finite element methods for a Rosenau equation similar to KdV. Zuo [30] employed sine–cosine and tanh techniques to obtain solitonic and periodic solutions of the Rosenau-KdV equation. Wang and Dai [31] presented a numerical solution to the Rosenau-KdV-RLW problem using quintic B-splines and finite element techniques.
A widely used analytical method for a variety of differential equations, especially nonlinear equations, is the generalized Riccati equation mapping (GREM) method [32], valued for its flexibility and simplicity [33], generality [34], nonlinearity [35], and the ability to simplify and solve challenges. GREM allows for systematic treatment of nonlinear PDEs, but its effectiveness depends on familiarity with the method, the characteristics of the problem, and an appropriate level of analytical precision. Nonlinear PDEs have numerous real-world applications. Numerical models based on complex nonlinear polynomial structures are used to generate nightly TV weather reports. It is important to note that the main advantage of the Sardar subequation method (SSM) [36] is its ability to generate a wide variety of soliton solutions, including periodic singular solitons, combined dark–bright solitons, and mixed dark–singular solitons. The method is notable for its simplicity, reliability, and adaptability to nonlinear equations.
Before closing this stage, it is worth pointing out that there are more analytical techniques which have been used to derive soliton solutions for NLPDEs. For example, recently, Chatziafratis et al. [37] discovered a novel long-range instability phenomenon which is a previously unknown type for the inhomogeneous linear Schrödinger equation on the vacuum spacetime quarter-plane by developing the linear Fokas’ unified transform method. Additionally, by developing the Dbar-steepest descent method, with respect to deriving the solutions of Wadati–Konno–Ichikawa equation, the authors of [38,39] have performed some interesting work. They solved the long-time asymptotic behavior of the solutions of the equation, and proved the soliton resolution conjecture and the asymptotic stability of solutions of the equation. Besides, Wu et al. [40] employed the recursion operator from the bi-Hamiltonian structure and diagonalized the non-diagonal matrix form in the second variation of the Lyapunov functional, thereby proving the stability of exact smooth multi-solitons for the two-component Camassa–Holm system.
2 Description of methods
In this section, we describe two analytical techniques – SSM and GREM – for solving the nonlinear Rosenau equation. The general form of the NLPDE is
where
with
where
2.1 SSM
The steps of the SSM are as follows:
Step 1. Let us assume that Eq. (2.3) has a solution
where the coefficients
Eq. (2.5) has the following solutions:
where
where
where
where
Step 2. Determine the degree
Step 3. Substitute (2.4) and (2.5) into (2.3), and expand the result in powers of
Step 4. Set the coefficients of like powers of
2.2 GREM method
We propose that the solution to Eq. (2.3) takes the form
where
with
The 27 solutions of Eq. (2.6) can subsequently be obtained.
Type 1. When
where
Type 2. When
where
Type 3. When
where
Type 4. When
where
3 Solutions via SSM
Now, substituting Eq. (2.2) into Eq. (1.1), we obtain the ordinary differential equation
Applying the homogeneous balance principle to Eq. (3.1), we find
where
The system of equations is solved numerically using Mathematica to find the values of the parameters:
Case 1: If
Case 2: If
Case 3: If
Case 4: If
4 Solutions via the GREM method
Applying the balancing principle to Eq. (1.2), we obtain
where
The system of algebraic equations was solved numerically using Mathematica, yielding the following values for the parameters
We define
Next, we analyze each of the possible cases.
Case 1: When
Case 2: When
Case 3: When
Case 4: When
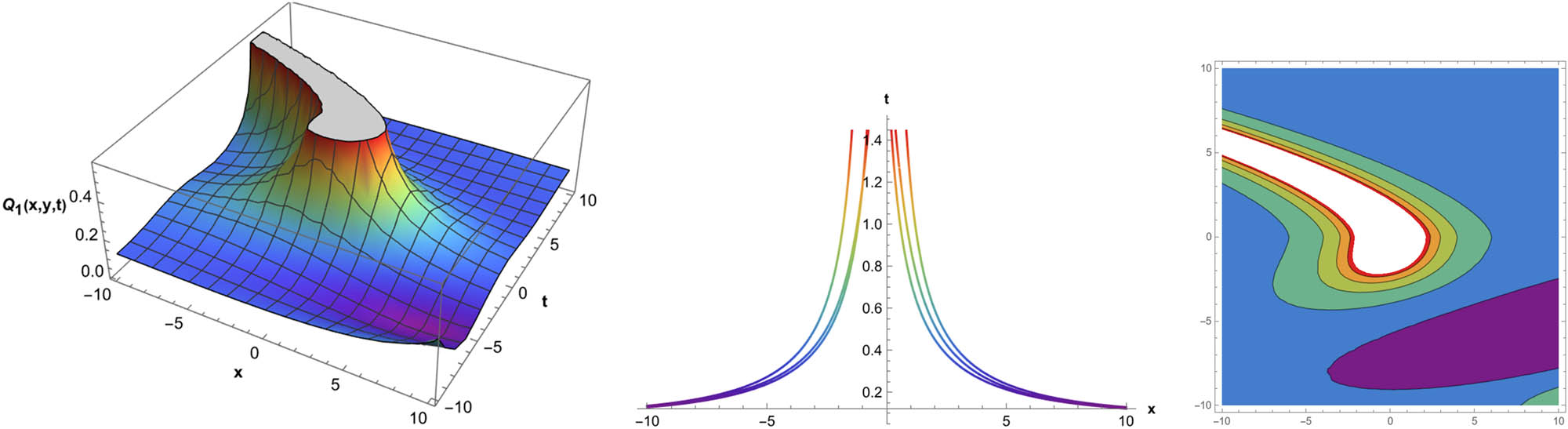
The solution analysis reveals distinct characteristics for each method: the SSM generated 14 exact solutions, while the GREM method produced 27 exact solutions. Moreover, their solution profiles differ significantly – SSM yields solutions exclusively in trigonometric and hyperbolic forms, whereas GREM provides a broader spectrum, including trigonometric, hyperbolic, and rational solutions (Figure 1).

Graphical behavior of
The graphical representations provide valuable insights into the dynamics of wave propagation. By selecting appropriate parameters, we visualize several solution profiles that exhibit different wave behaviors. Several remarkable patterns emerge: the graphical behavior of

Graphical behavior of

Graphical behavior of

Graphical behavior of

Graphical behavior of
Graphical behavior of
5 Conclusion
In this study, analytical solutions of the Rosenau model were obtained using two methods: SSM and GREM method. The mathematical model is a fractional extension [41,42] of the classical Rosenau equation, and several solutions representing solitary waves and solitons were successfully derived in the form of trigonometric, mixed trigonometric, hyperbolic, mixed hyperbolic, rational, and exponential functions. The analytical results include various solitary wave solutions, as well as bright and dark soliton profiles. Fractional derivatives and fractional wave transformations were employed to obtain these solutions. By selecting appropriate parameter values, 3D, 2D, and corresponding contour plots are presented to illustrate the physical behavior of the analytical results. This approach provides a versatile tool for research and experimentation, allowing researchers to adjust parameters to explore a wide range of wave phenomena.
Acknowledgments
The authors wish to acknowledge the support from Ms. Paola Daniela Ibarra-Villa. Moreover, the authors wish to thank the anonymous reviewers and the editor in charge of handling this manuscript for all their invaluable comments. Their constructive criticisms and suggestions enabled us to improve the quality of this work.
-
Funding information: The authors state no funding involved.
-
Author contributions: All authors have accepted responsibility for the entire content of this manuscript and approved its submission.
-
Conflict of interest: Jorge E. Macías-Díaz, who is the co-author of this article, is a current Editorial Board member of Open Physics. This fact did not affect the peer-review process. The authors state no other conflict of interest.
-
Data availability statement: The code/datasets generated and/or analysed during the current study are available from the corresponding author on reasonable request.
References
[1] Woese CR. A new biology for a new century. Microbiol Mol Biol Rev. 2004;68(2):173–86. 10.1128/MMBR.68.2.173-186.2004Search in Google Scholar PubMed PubMed Central
[2] Papoutsakis ET. Engineering solventogenic clostridia. Current Opinion Biotech. 2008;19(5):420–9. 10.1016/j.copbio.2008.08.003Search in Google Scholar PubMed
[3] Eichten E, Hinchliffe I, Lane K, Quigg C. Supercollider physics. Rev Modern Phys. 1984;56(4):579. 10.1103/RevModPhys.56.579Search in Google Scholar
[4] Talavera JM, Tobón LE, Gómez JA, Culman MA, Aranda JM, Parra DT, et al. Review of IoT applications in agro-industrial and environmental fields. Comput Electron Agricult. 2017;142:283–97. 10.1016/j.compag.2017.09.015Search in Google Scholar
[5] Kakani SL. Material science. New Delhi, India: New Age International (P) Ltd., Publishers; 2004. Search in Google Scholar
[6] Walter U, Walter U. Astronautics. Weinheim: Wiley-VCH; 2008. p. 201–20. Search in Google Scholar
[7] Soh S, Byrska M, Kandere-Grzybowska K, Grzybowski BA. Reaction-diffusion systems in intracellular molecular transport and control. Angewandte Chem Int Edition. 2010;49(25):4170–98. 10.1002/anie.200905513Search in Google Scholar PubMed PubMed Central
[8] Boccaletti S, Kurths J, Osipov G, Valladares DL, Zhou CS. The synchronization of chaotic systems. Phys Reports. 2002;366(1–2):1–101. 10.1016/S0370-1573(02)00137-0Search in Google Scholar
[9] Caruthers SD, Wickline SA, Lanza GM. Nanotechnological applications in medicine. Current Opinion Biotech. 2007;18(1):26–30. 10.1016/j.copbio.2007.01.006Search in Google Scholar PubMed
[10] Drelich J, Fang C, White CL. Measurement of interfacial tension in fluid-fluid systems. Encyclopedia Surface Colloid Sci. 2002;3:3158–63. Search in Google Scholar
[11] Kuramoto Y, Tsuzuki T. Persistent propagation of concentration waves in dissipative media far from thermal equilibrium. Progress Theoret Phys. 1976;55(2):356–69. 10.1143/PTP.55.356Search in Google Scholar
[12] Baxter RJ. Hard hexagons: exact solution. J Phys A Math General. 1980;13(3):L61. 10.1088/0305-4470/13/3/007Search in Google Scholar
[13] Bai C. A unified algebraic approach to the classical YangBaxter equation. J Phys A Math Theoret. 2007;40(36):11073. 10.1088/1751-8113/40/36/007Search in Google Scholar
[14] Yomba E. The modified extended Fan subequation method and its application to the (2+1)-dimensional BroerKauoKupershmidt equation. Chaos Solitons Fractals. 2006;27(1):187–96. 10.1016/j.chaos.2005.03.021Search in Google Scholar
[15] Shakeel M, Shah NA, Chung JD. Application of modified exp-function method for strain wave equation for finding analytical solutions. Ain Shams Eng J. 2023;14(3):101883. 10.1016/j.asej.2022.101883Search in Google Scholar
[16] Bishop CM. Variational principal components. In 1999 Ninth International Conference on Artificial Neural Networks ICANN 99. (Conf. Publ. No. 470) Vol. 1. IET; 1999. p. 509–14. 10.1049/cp:19991160Search in Google Scholar
[17] Parkex EJ. Observations on the tanhcoth expansion method for finding solutions to nonlinear evolution equations. Appl Math Comput. 2010;217(4):1749–54. 10.1016/j.amc.2009.11.037Search in Google Scholar
[18] Kudryashov NA. Method for finding optical solitons of generalized nonlinear Schrödinger equations. Optik. 2022;261:169163. 10.1016/j.ijleo.2022.169163Search in Google Scholar
[19] Rezazadeh H, Korkmaz A, Eslami M, Mirhosseini-Alizamini SM. A large family of optical solutions to KunduEckhaus model by a new auxiliary equation method. Opt Quantum Electron. 2019;51:1–12. 10.1007/s11082-019-1801-4Search in Google Scholar
[20] Roberts RA. The asymptotic computational ansatz: Application to critical angle beam transmission boundary integral equation solution. J Acoust Soc Am. 1994;95(4):1711–25. 10.1121/1.408690Search in Google Scholar
[21] Yan Z. A sinh-Gordon equation expansion method to construct doubly periodic solutions for nonlinear differential equations. Chaos Solitons Fractals. 2003;16(2):291–7. 10.1016/S0960-0779(02)00321-1Search in Google Scholar
[22] Eslami M, Fathi Vajargah B, Mirzazadeh M, Biswas A. Application of first integral method to fractional partial differential equations. Indian J Phys. 2014;88:177–84. 10.1007/s12648-013-0401-6Search in Google Scholar
[23] Fan E, Zhang J. Applications of the Jacobi elliptic function method to special-type nonlinear equations. Phys Lett A. 2002;305(6):383–92. 10.1016/S0375-9601(02)01516-5Search in Google Scholar
[24] Beer RD. Dynamical approaches to cognitive science. Trends Cognitive Sci. 2000;4(3):91–9. 10.1016/S1364-6613(99)01440-0Search in Google Scholar
[25] Spurk J, Aksel N. Fluid mechanics. Springer Science and Business Media; 2007. Search in Google Scholar
[26] Li C, Chen A, Ye J. Numerical approaches to fractional calculus and fractional ordinary differential equation. J Comput Phys. 2011;230(9):3352–68. 10.1016/j.jcp.2011.01.030Search in Google Scholar
[27] Tricomi FG. Integral equations. Vol. 5, San Francisco, USA: Courier Corporation; 1985. Search in Google Scholar
[28] Park MA. On the Rosenau equation. Math Appl Comput. 1990;9(2):145–52. Search in Google Scholar
[29] Chung SK, Ha SN. Finite element Galerkin solutions for the Rosenau equation. Appl Anal. 1994;54(1–2):39–56. 10.1080/00036819408840267Search in Google Scholar
[30] Zuo JM. Solitons and periodic solutions for the Rosenau-KdV and Rosenau-Kawahara equations. Appl Math Comput. 2009;215(2):835–40. 10.1016/j.amc.2009.06.011Search in Google Scholar
[31] Wang X, Dai W. A three-level linear implicit conservative scheme for the RosenauKdVRLW equation. J Comput Appl Math. 2018;330:295–306. 10.1016/j.cam.2017.09.009Search in Google Scholar
[32] Naher H, Abdullah FA. The modified Benjamin-Bona-Mahony equation via the extended generalized Riccati equation mapping method. Appl Math Sci. 2012;6(111):5495–512. 10.1155/2012/486458Search in Google Scholar
[33] Grandin T. Animal handling. Veterinary Clinics North America Food Animal Practice. 1987;3(2):323–38. 10.1016/S0749-0720(15)31155-5Search in Google Scholar
[34] McCarthy J. Generality in artificial intelligence. Commun ACM. 1987;30(12):1030–5. 10.1145/33447.33448Search in Google Scholar
[35] Deidda L, Fattouh B. Non-linearity between finance and growth. Econ Lett. 2002;74(3):339–45. 10.1016/S0165-1765(01)00571-7Search in Google Scholar
[36] Rehman HU, Akber R, Wazwaz AM, Alshehri HM, Osman MS. Analysis of Brownian motion in stochastic Schrödinger wave equation using Sardar sub-equation method. Optik. 2023;289:171305. 10.1016/j.ijleo.2023.171305Search in Google Scholar
[37] Chatziafratis A, Ozawa T, Tian SF. Rigorous analysis of the unified transform method and long-range instabilities for the inhomogeneous time-dependent Schrödinger equation on the quarter-plane. Math Ann. 2024;389(4):3535–602. 10.1007/s00208-023-02698-4Search in Google Scholar
[38] Li ZQ, Tian SF, Yang JJ. On the soliton resolution and the asymptotic stability of N-soliton solution for the Wadati-Konno-Ichikawa equation with finite density initial data in space-time solitonic regions. Adv Math. 2022;409:108639. 10.1016/j.aim.2022.108639Search in Google Scholar
[39] Li ZQ, Tian SF, Yang JJ. Soliton resolution for the Wadati-Konno-Ichikawa equation with weighted Sobolev initial data. In: Annales Henri Poincaré. Vol. 23. No. 7. Cham: Springer International Publishing; 2022. p. 2611–55. 10.1007/s00023-021-01143-zSearch in Google Scholar
[40] Wu ZJ, Tian SF, Liu Y, Wang Z. Stability of smooth multisolitons for the two-component Camassa-Holm system. J London Math Soc. 2025;111(4):e70158. 10.1112/jlms.70158Search in Google Scholar
[41] Baleanu D, Karaca Y, Vázquez L, Macías-Díaz JE. Advanced fractional calculus, differential equations and neural networks: Analysis, modeling and numerical computations. Phys Scr. 2023;98(11):110201. 10.1088/1402-4896/acfe73Search in Google Scholar
[42] Delgado BB, Macías-Díaz JE. On the general solutions of some non-homogeneous Div-Curl systems with Riemann-Liouville and Caputo fractional derivatives. Fractal Fract. 2021;5(3):117. 10.3390/fractalfract5030117Search in Google Scholar
© 2025 the author(s), published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Research Articles
- Single-step fabrication of Ag2S/poly-2-mercaptoaniline nanoribbon photocathodes for green hydrogen generation from artificial and natural red-sea water
- Abundant new interaction solutions and nonlinear dynamics for the (3+1)-dimensional Hirota–Satsuma–Ito-like equation
- A novel gold and SiO2 material based planar 5-element high HPBW end-fire antenna array for 300 GHz applications
- Explicit exact solutions and bifurcation analysis for the mZK equation with truncated M-fractional derivatives utilizing two reliable methods
- Optical and laser damage resistance: Role of periodic cylindrical surfaces
- Numerical study of flow and heat transfer in the air-side metal foam partially filled channels of panel-type radiator under forced convection
- Water-based hybrid nanofluid flow containing CNT nanoparticles over an extending surface with velocity slips, thermal convective, and zero-mass flux conditions
- Dynamical wave structures for some diffusion--reaction equations with quadratic and quartic nonlinearities
- Solving an isotropic grey matter tumour model via a heat transfer equation
- Study on the penetration protection of a fiber-reinforced composite structure with CNTs/GFP clip STF/3DKevlar
- Influence of Hall current and acoustic pressure on nanostructured DPL thermoelastic plates under ramp heating in a double-temperature model
- Applications of the Belousov–Zhabotinsky reaction–diffusion system: Analytical and numerical approaches
- AC electroosmotic flow of Maxwell fluid in a pH-regulated parallel-plate silica nanochannel
- Interpreting optical effects with relativistic transformations adopting one-way synchronization to conserve simultaneity and space–time continuity
- Modeling and analysis of quantum communication channel in airborne platforms with boundary layer effects
- Theoretical and numerical investigation of a memristor system with a piecewise memductance under fractal–fractional derivatives
- Tuning the structure and electro-optical properties of α-Cr2O3 films by heat treatment/La doping for optoelectronic applications
- High-speed multi-spectral explosion temperature measurement using golden-section accelerated Pearson correlation algorithm
- Dynamic behavior and modulation instability of the generalized coupled fractional nonlinear Helmholtz equation with cubic–quintic term
- Study on the duration of laser-induced air plasma flash near thin film surface
- Exploring the dynamics of fractional-order nonlinear dispersive wave system through homotopy technique
- The mechanism of carbon monoxide fluorescence inside a femtosecond laser-induced plasma
- Numerical solution of a nonconstant coefficient advection diffusion equation in an irregular domain and analyses of numerical dispersion and dissipation
- Numerical examination of the chemically reactive MHD flow of hybrid nanofluids over a two-dimensional stretching surface with the Cattaneo–Christov model and slip conditions
- Impacts of sinusoidal heat flux and embraced heated rectangular cavity on natural convection within a square enclosure partially filled with porous medium and Casson-hybrid nanofluid
- Stability analysis of unsteady ternary nanofluid flow past a stretching/shrinking wedge
- Solitonic wave solutions of a Hamiltonian nonlinear atom chain model through the Hirota bilinear transformation method
- Bilinear form and soltion solutions for (3+1)-dimensional negative-order KdV-CBS equation
- Solitary chirp pulses and soliton control for variable coefficients cubic–quintic nonlinear Schrödinger equation in nonuniform management system
- Influence of decaying heat source and temperature-dependent thermal conductivity on photo-hydro-elasto semiconductor media
- Dissipative disorder optimization in the radiative thin film flow of partially ionized non-Newtonian hybrid nanofluid with second-order slip condition
- Bifurcation, chaotic behavior, and traveling wave solutions for the fractional (4+1)-dimensional Davey–Stewartson–Kadomtsev–Petviashvili model
- New investigation on soliton solutions of two nonlinear PDEs in mathematical physics with a dynamical property: Bifurcation analysis
- Mathematical analysis of nanoparticle type and volume fraction on heat transfer efficiency of nanofluids
- Creation of single-wing Lorenz-like attractors via a ten-ninths-degree term
- Optical soliton solutions, bifurcation analysis, chaotic behaviors of nonlinear Schrödinger equation and modulation instability in optical fiber
- Chaotic dynamics and some solutions for the (n + 1)-dimensional modified Zakharov–Kuznetsov equation in plasma physics
- Fractal formation and chaotic soliton phenomena in nonlinear conformable Heisenberg ferromagnetic spin chain equation
- Single-step fabrication of Mn(iv) oxide-Mn(ii) sulfide/poly-2-mercaptoaniline porous network nanocomposite for pseudo-supercapacitors and charge storage
- Novel constructed dynamical analytical solutions and conserved quantities of the new (2+1)-dimensional KdV model describing acoustic wave propagation
- Tavis–Cummings model in the presence of a deformed field and time-dependent coupling
- Spinning dynamics of stress-dependent viscosity of generalized Cross-nonlinear materials affected by gravitationally swirling disk
- Design and prediction of high optical density photovoltaic polymers using machine learning-DFT studies
- Robust control and preservation of quantum steering, nonlocality, and coherence in open atomic systems
- Coating thickness and process efficiency of reverse roll coating using a magnetized hybrid nanomaterial flow
- Dynamic analysis, circuit realization, and its synchronization of a new chaotic hyperjerk system
- Decoherence of steerability and coherence dynamics induced by nonlinear qubit–cavity interactions
- Finite element analysis of turbulent thermal enhancement in grooved channels with flat- and plus-shaped fins
- Modulational instability and associated ion-acoustic modulated envelope solitons in a quantum plasma having ion beams
- Statistical inference of constant-stress partially accelerated life tests under type II generalized hybrid censored data from Burr III distribution
- On solutions of the Dirac equation for 1D hydrogenic atoms or ions
- Entropy optimization for chemically reactive magnetized unsteady thin film hybrid nanofluid flow on inclined surface subject to nonlinear mixed convection and variable temperature
- Stability analysis, circuit simulation, and color image encryption of a novel four-dimensional hyperchaotic model with hidden and self-excited attractors
- A high-accuracy exponential time integration scheme for the Darcy–Forchheimer Williamson fluid flow with temperature-dependent conductivity
- Novel analysis of fractional regularized long-wave equation in plasma dynamics
- Development of a photoelectrode based on a bismuth(iii) oxyiodide/intercalated iodide-poly(1H-pyrrole) rough spherical nanocomposite for green hydrogen generation
- Investigation of solar radiation effects on the energy performance of the (Al2O3–CuO–Cu)/H2O ternary nanofluidic system through a convectively heated cylinder
- Quantum resources for a system of two atoms interacting with a deformed field in the presence of intensity-dependent coupling
- Studying bifurcations and chaotic dynamics in the generalized hyperelastic-rod wave equation through Hamiltonian mechanics
- A new numerical technique for the solution of time-fractional nonlinear Klein–Gordon equation involving Atangana–Baleanu derivative using cubic B-spline functions
- Interaction solutions of high-order breathers and lumps for a (3+1)-dimensional conformable fractional potential-YTSF-like model
- Hydraulic fracturing radioactive source tracing technology based on hydraulic fracturing tracing mechanics model
- Numerical solution and stability analysis of non-Newtonian hybrid nanofluid flow subject to exponential heat source/sink over a Riga sheet
- Numerical investigation of mixed convection and viscous dissipation in couple stress nanofluid flow: A merged Adomian decomposition method and Mohand transform
- Effectual quintic B-spline functions for solving the time fractional coupled Boussinesq–Burgers equation arising in shallow water waves
- Analysis of MHD hybrid nanofluid flow over cone and wedge with exponential and thermal heat source and activation energy
- Solitons and travelling waves structure for M-fractional Kairat-II equation using three explicit methods
- Impact of nanoparticle shapes on the heat transfer properties of Cu and CuO nanofluids flowing over a stretching surface with slip effects: A computational study
- Computational simulation of heat transfer and nanofluid flow for two-sided lid-driven square cavity under the influence of magnetic field
- Irreversibility analysis of a bioconvective two-phase nanofluid in a Maxwell (non-Newtonian) flow induced by a rotating disk with thermal radiation
- Hydrodynamic and sensitivity analysis of a polymeric calendering process for non-Newtonian fluids with temperature-dependent viscosity
- Exploring the peakon solitons molecules and solitary wave structure to the nonlinear damped Kortewege–de Vries equation through efficient technique
- Modeling and heat transfer analysis of magnetized hybrid micropolar blood-based nanofluid flow in Darcy–Forchheimer porous stenosis narrow arteries
- Activation energy and cross-diffusion effects on 3D rotating nanofluid flow in a Darcy–Forchheimer porous medium with radiation and convective heating
- Insights into chemical reactions occurring in generalized nanomaterials due to spinning surface with melting constraints
- Influence of a magnetic field on double-porosity photo-thermoelastic materials under Lord–Shulman theory
- Soliton-like solutions for a nonlinear doubly dispersive equation in an elastic Murnaghan's rod via Hirota's bilinear method
- Analytical and numerical investigation of exact wave patterns and chaotic dynamics in the extended improved Boussinesq equation
- Nonclassical correlation dynamics of Heisenberg XYZ states with (x, y)-spin--orbit interaction, x-magnetic field, and intrinsic decoherence effects
- Exact traveling wave and soliton solutions for chemotaxis model and (3+1)-dimensional Boiti–Leon–Manna–Pempinelli equation
- Unveiling the transformative role of samarium in ZnO: Exploring structural and optical modifications for advanced functional applications
- On the derivation of solitary wave solutions for the time-fractional Rosenau equation through two analytical techniques
- Analyzing the role of length and radius of MWCNTs in a nanofluid flow influenced by variable thermal conductivity and viscosity considering Marangoni convection
- Advanced mathematical analysis of heat and mass transfer in oscillatory micropolar bio-nanofluid flows via peristaltic waves and electroosmotic effects
- Review Article
- Examination of the gamma radiation shielding properties of different clay and sand materials in the Adrar region
- Special Issue on Fundamental Physics from Atoms to Cosmos - Part II
- Possible explanation for the neutron lifetime puzzle
- Special Issue on Nanomaterial utilization and structural optimization - Part III
- Numerical investigation on fluid-thermal-electric performance of a thermoelectric-integrated helically coiled tube heat exchanger for coal mine air cooling
- Special Issue on Nonlinear Dynamics and Chaos in Physical Systems
- Analysis of the fractional relativistic isothermal gas sphere with application to neutron stars
- Abundant wave symmetries in the (3+1)-dimensional Chafee–Infante equation through the Hirota bilinear transformation technique
- Successive midpoint method for fractional differential equations with nonlocal kernels: Error analysis, stability, and applications
Articles in the same Issue
- Research Articles
- Single-step fabrication of Ag2S/poly-2-mercaptoaniline nanoribbon photocathodes for green hydrogen generation from artificial and natural red-sea water
- Abundant new interaction solutions and nonlinear dynamics for the (3+1)-dimensional Hirota–Satsuma–Ito-like equation
- A novel gold and SiO2 material based planar 5-element high HPBW end-fire antenna array for 300 GHz applications
- Explicit exact solutions and bifurcation analysis for the mZK equation with truncated M-fractional derivatives utilizing two reliable methods
- Optical and laser damage resistance: Role of periodic cylindrical surfaces
- Numerical study of flow and heat transfer in the air-side metal foam partially filled channels of panel-type radiator under forced convection
- Water-based hybrid nanofluid flow containing CNT nanoparticles over an extending surface with velocity slips, thermal convective, and zero-mass flux conditions
- Dynamical wave structures for some diffusion--reaction equations with quadratic and quartic nonlinearities
- Solving an isotropic grey matter tumour model via a heat transfer equation
- Study on the penetration protection of a fiber-reinforced composite structure with CNTs/GFP clip STF/3DKevlar
- Influence of Hall current and acoustic pressure on nanostructured DPL thermoelastic plates under ramp heating in a double-temperature model
- Applications of the Belousov–Zhabotinsky reaction–diffusion system: Analytical and numerical approaches
- AC electroosmotic flow of Maxwell fluid in a pH-regulated parallel-plate silica nanochannel
- Interpreting optical effects with relativistic transformations adopting one-way synchronization to conserve simultaneity and space–time continuity
- Modeling and analysis of quantum communication channel in airborne platforms with boundary layer effects
- Theoretical and numerical investigation of a memristor system with a piecewise memductance under fractal–fractional derivatives
- Tuning the structure and electro-optical properties of α-Cr2O3 films by heat treatment/La doping for optoelectronic applications
- High-speed multi-spectral explosion temperature measurement using golden-section accelerated Pearson correlation algorithm
- Dynamic behavior and modulation instability of the generalized coupled fractional nonlinear Helmholtz equation with cubic–quintic term
- Study on the duration of laser-induced air plasma flash near thin film surface
- Exploring the dynamics of fractional-order nonlinear dispersive wave system through homotopy technique
- The mechanism of carbon monoxide fluorescence inside a femtosecond laser-induced plasma
- Numerical solution of a nonconstant coefficient advection diffusion equation in an irregular domain and analyses of numerical dispersion and dissipation
- Numerical examination of the chemically reactive MHD flow of hybrid nanofluids over a two-dimensional stretching surface with the Cattaneo–Christov model and slip conditions
- Impacts of sinusoidal heat flux and embraced heated rectangular cavity on natural convection within a square enclosure partially filled with porous medium and Casson-hybrid nanofluid
- Stability analysis of unsteady ternary nanofluid flow past a stretching/shrinking wedge
- Solitonic wave solutions of a Hamiltonian nonlinear atom chain model through the Hirota bilinear transformation method
- Bilinear form and soltion solutions for (3+1)-dimensional negative-order KdV-CBS equation
- Solitary chirp pulses and soliton control for variable coefficients cubic–quintic nonlinear Schrödinger equation in nonuniform management system
- Influence of decaying heat source and temperature-dependent thermal conductivity on photo-hydro-elasto semiconductor media
- Dissipative disorder optimization in the radiative thin film flow of partially ionized non-Newtonian hybrid nanofluid with second-order slip condition
- Bifurcation, chaotic behavior, and traveling wave solutions for the fractional (4+1)-dimensional Davey–Stewartson–Kadomtsev–Petviashvili model
- New investigation on soliton solutions of two nonlinear PDEs in mathematical physics with a dynamical property: Bifurcation analysis
- Mathematical analysis of nanoparticle type and volume fraction on heat transfer efficiency of nanofluids
- Creation of single-wing Lorenz-like attractors via a ten-ninths-degree term
- Optical soliton solutions, bifurcation analysis, chaotic behaviors of nonlinear Schrödinger equation and modulation instability in optical fiber
- Chaotic dynamics and some solutions for the (n + 1)-dimensional modified Zakharov–Kuznetsov equation in plasma physics
- Fractal formation and chaotic soliton phenomena in nonlinear conformable Heisenberg ferromagnetic spin chain equation
- Single-step fabrication of Mn(iv) oxide-Mn(ii) sulfide/poly-2-mercaptoaniline porous network nanocomposite for pseudo-supercapacitors and charge storage
- Novel constructed dynamical analytical solutions and conserved quantities of the new (2+1)-dimensional KdV model describing acoustic wave propagation
- Tavis–Cummings model in the presence of a deformed field and time-dependent coupling
- Spinning dynamics of stress-dependent viscosity of generalized Cross-nonlinear materials affected by gravitationally swirling disk
- Design and prediction of high optical density photovoltaic polymers using machine learning-DFT studies
- Robust control and preservation of quantum steering, nonlocality, and coherence in open atomic systems
- Coating thickness and process efficiency of reverse roll coating using a magnetized hybrid nanomaterial flow
- Dynamic analysis, circuit realization, and its synchronization of a new chaotic hyperjerk system
- Decoherence of steerability and coherence dynamics induced by nonlinear qubit–cavity interactions
- Finite element analysis of turbulent thermal enhancement in grooved channels with flat- and plus-shaped fins
- Modulational instability and associated ion-acoustic modulated envelope solitons in a quantum plasma having ion beams
- Statistical inference of constant-stress partially accelerated life tests under type II generalized hybrid censored data from Burr III distribution
- On solutions of the Dirac equation for 1D hydrogenic atoms or ions
- Entropy optimization for chemically reactive magnetized unsteady thin film hybrid nanofluid flow on inclined surface subject to nonlinear mixed convection and variable temperature
- Stability analysis, circuit simulation, and color image encryption of a novel four-dimensional hyperchaotic model with hidden and self-excited attractors
- A high-accuracy exponential time integration scheme for the Darcy–Forchheimer Williamson fluid flow with temperature-dependent conductivity
- Novel analysis of fractional regularized long-wave equation in plasma dynamics
- Development of a photoelectrode based on a bismuth(iii) oxyiodide/intercalated iodide-poly(1H-pyrrole) rough spherical nanocomposite for green hydrogen generation
- Investigation of solar radiation effects on the energy performance of the (Al2O3–CuO–Cu)/H2O ternary nanofluidic system through a convectively heated cylinder
- Quantum resources for a system of two atoms interacting with a deformed field in the presence of intensity-dependent coupling
- Studying bifurcations and chaotic dynamics in the generalized hyperelastic-rod wave equation through Hamiltonian mechanics
- A new numerical technique for the solution of time-fractional nonlinear Klein–Gordon equation involving Atangana–Baleanu derivative using cubic B-spline functions
- Interaction solutions of high-order breathers and lumps for a (3+1)-dimensional conformable fractional potential-YTSF-like model
- Hydraulic fracturing radioactive source tracing technology based on hydraulic fracturing tracing mechanics model
- Numerical solution and stability analysis of non-Newtonian hybrid nanofluid flow subject to exponential heat source/sink over a Riga sheet
- Numerical investigation of mixed convection and viscous dissipation in couple stress nanofluid flow: A merged Adomian decomposition method and Mohand transform
- Effectual quintic B-spline functions for solving the time fractional coupled Boussinesq–Burgers equation arising in shallow water waves
- Analysis of MHD hybrid nanofluid flow over cone and wedge with exponential and thermal heat source and activation energy
- Solitons and travelling waves structure for M-fractional Kairat-II equation using three explicit methods
- Impact of nanoparticle shapes on the heat transfer properties of Cu and CuO nanofluids flowing over a stretching surface with slip effects: A computational study
- Computational simulation of heat transfer and nanofluid flow for two-sided lid-driven square cavity under the influence of magnetic field
- Irreversibility analysis of a bioconvective two-phase nanofluid in a Maxwell (non-Newtonian) flow induced by a rotating disk with thermal radiation
- Hydrodynamic and sensitivity analysis of a polymeric calendering process for non-Newtonian fluids with temperature-dependent viscosity
- Exploring the peakon solitons molecules and solitary wave structure to the nonlinear damped Kortewege–de Vries equation through efficient technique
- Modeling and heat transfer analysis of magnetized hybrid micropolar blood-based nanofluid flow in Darcy–Forchheimer porous stenosis narrow arteries
- Activation energy and cross-diffusion effects on 3D rotating nanofluid flow in a Darcy–Forchheimer porous medium with radiation and convective heating
- Insights into chemical reactions occurring in generalized nanomaterials due to spinning surface with melting constraints
- Influence of a magnetic field on double-porosity photo-thermoelastic materials under Lord–Shulman theory
- Soliton-like solutions for a nonlinear doubly dispersive equation in an elastic Murnaghan's rod via Hirota's bilinear method
- Analytical and numerical investigation of exact wave patterns and chaotic dynamics in the extended improved Boussinesq equation
- Nonclassical correlation dynamics of Heisenberg XYZ states with (x, y)-spin--orbit interaction, x-magnetic field, and intrinsic decoherence effects
- Exact traveling wave and soliton solutions for chemotaxis model and (3+1)-dimensional Boiti–Leon–Manna–Pempinelli equation
- Unveiling the transformative role of samarium in ZnO: Exploring structural and optical modifications for advanced functional applications
- On the derivation of solitary wave solutions for the time-fractional Rosenau equation through two analytical techniques
- Analyzing the role of length and radius of MWCNTs in a nanofluid flow influenced by variable thermal conductivity and viscosity considering Marangoni convection
- Advanced mathematical analysis of heat and mass transfer in oscillatory micropolar bio-nanofluid flows via peristaltic waves and electroosmotic effects
- Review Article
- Examination of the gamma radiation shielding properties of different clay and sand materials in the Adrar region
- Special Issue on Fundamental Physics from Atoms to Cosmos - Part II
- Possible explanation for the neutron lifetime puzzle
- Special Issue on Nanomaterial utilization and structural optimization - Part III
- Numerical investigation on fluid-thermal-electric performance of a thermoelectric-integrated helically coiled tube heat exchanger for coal mine air cooling
- Special Issue on Nonlinear Dynamics and Chaos in Physical Systems
- Analysis of the fractional relativistic isothermal gas sphere with application to neutron stars
- Abundant wave symmetries in the (3+1)-dimensional Chafee–Infante equation through the Hirota bilinear transformation technique
- Successive midpoint method for fractional differential equations with nonlocal kernels: Error analysis, stability, and applications