A muscle model for hybrid muscle activation
-
Christian Klauer
 ,
Maximilian Irmer
,
Maximilian Irmer

Abstract
To develop model-based control strategies for Functional Electrical Stimulation (FES) in order to support weak voluntary muscle contractions, a hybrid model for describing joint motions induced by concurrent voluntary-and FES induced muscle activation is proposed. It is based on a Hammerstein model – as commonly used in feedback controlled FES – and exemplarily applied to describe the shoulder abduction joint angle. Main component of a Hammerstein muscle model is usually a static input nonlinearity depending on the stimulation intensity. To additionally incorporate voluntary contributions, we extended the static non-linearity by a second input describing the intensity of the voluntary contribution that is estimated by electromyography (EMG) measurements – even during active FES. An Artificial Neural Network (ANN) is used to describe the static input non-linearity. The output of the ANN drives a second-order linear dynamical system that describes the combined muscle activation and joint angle dynamics. The tunable parameters are adapted to the individual subject by a system identification approach using previously recorded I/O-data. The model has been validated in two healthy subjects yielding RMS values for the joint angle error of 3.56° and 3.44°, respectively.
1 Introduction
For the rehabilitation of stroke patients it has been found out that a synchronous muscle activation by FES in addition to the voluntary contribution improves motor re-learning [7]. It is expected that closed-loop concepts for adjusting the intensity of FES can significantly improve the rehabilitation outcome. However, up to now, most approaches for feedback controlled FES do not incorporate the residual voluntary contribution of the patient. In principle, the estimation of the voluntary activity, even in FES-activated muscles, is possible by means of EMG measurements processed by Digital Signal Processing (DSP) [1]. Despite DSP, the noise level of the estimated volitional muscle activity during active FES is usually higher than during normal EMG recording without FES due to incomplete removal of present stimulation artifacts and the occurring M-Waves (muscle activity caused by FES). Using noisy signals for feedback control usually limit the achievable control performance.
Only few approaches for controlling the stimulation intensity based on the voluntary activity exist; among them are strategies in which the behavior of the stimulation intensity is triggered by crossing pre-defined thresholds for the voluntary activity [1]. The most advanced approach so far is to set the stimulation intensity proportionally to the online estimated voluntary effort of the patient in order to amplify weak residual movements [6]. However, this approach is prone to oscillations (instability) caused by the closed-loop since a low-pass filter must be applied to the noisy voluntary activity.
To improve the estimation of the voluntary activity during FES, we propose the following approach: A model that maps the stimulation intensity and the voluntary activity (hybrid muscle activation) to the occurring joint angle is adapted to the individual person. In a next step, this model can then be used to estimate the voluntary activity by an input observer (an inverse calculation of the voluntary input), whereby measurements of the joint motion and the known stimulation intensity are used.
Previous investigations in modeling muscle behavior based on EMG measurements typically predict the muscle force – commonly only under isometric conditions. A recent example is given in [3], wherein a NARX recurrent neural network model is trained to predict the muscle torque under isometric conditions, however, without considering the voluntary contribution. In [4], a model for describing voluntary muscle activations even without the constraint of isometric conditions is proposed. However, no FES has been applied herein.
2 Experimental set-up
To demonstrate the feasibility of the proposed hybrid model, it is exemplarily applied to the shoulder abduction movement against gravity, as shown in Fig. 1 following local ethical guidelines. Biphasic pulses with 27 Hz were applied the medial deltoid muscle through surface self-adhesive electrodes (ValuTrode® CF4090 (4x9 cm), Axel-gaard Manufacturing Ltd.) using a current-controlled stimulator (Rehastim™, Hasomed GmbH). Using an inertial sensor (MTx, Xsens Technologies B.V.) the shoulder abduction angle was measured. Further, EMG signals were obtained from separate electrodes using the EMG amplifier (Porti 32™, TMS International).

Experimental Set-up.
The raw EMG-measurements in-between two stimulation pulses are filtered using the approach described in [2] yielding a normalized estimate y* (range [0,1]) for the intensity of the voluntary contribution. For later use in the model, this noisy volitional muscle activity is low-pass filtered by means of a non-causal fourth-order Butterworth filter with zero phase shift and a cut-off frequency of 27 Hz yielding the volitional activity level y (range [0,1]). The stimulation intensity v is applied in terms of a normalized charge yielding current amplitude and pulsewith of the applied bi-phasic stimulation pulses as described in [2].
The real-time implementation is based on a computer system running Linux. Development and evaluation was performed in Scilab 5.5.1 (http://www.scilab.org) using the real-time framework OpenRTDynamics (http://openrtdynamics.sf.net/).
3 Methods
In feedback controlled FES, often Hammerstein muscle models are employed that mainly consist of a non-linear static input function followed by linear transfer function. The input function, also called recruitment function, yields the muscle recruitment (amount of active motor units) depending on the normalized stimulation intensity v (range [0,1]). The dynamic model part (the transfer function) describes the muscle activation dynamics and the joint motion driven by the muscle recruitment. To consider hybrid muscle activations, we extend the static input function by adding a second input – the voluntary activity estimate . As shown in Fig. 2, this extended recruitment function is described by an Artificial Neural Network (ANN) that uses Local Linear Models (LLM) weighted by Radial Basis (RB) functions (c.f. Fig. 3). Four normalized radial basis functions

The used model consists of a static input function (artifi-cial neural network), that describe the motor unit recruitment, and linear transfer function model (AutoRegressive model with eXogenous input (ARX)), that captures the muscle activation dynamics and the joint motion.
based on standard radial basis functions
are used. The normalized RB functions are combined with four local linear models to yield the neurons whose outputs are superposed yielding the output of the ANN:

The used structure for the artificial neural network using four neurons.
The parameters of the radial basis functions are chosen with respect to [5] and summarized in Tab. 1.
Parameters of the ANN.
| i (neuron) | ci,v | ci,γ | σi,σ |
|---|---|---|---|
| 1 | 0.25 | 0.25 | 0.2167 |
| 2 | 0.25 | 0.75 | 0.2167 |
| 3 | 0.75 | 0.25 | 0.2167 |
| 4 | 0.75 | 0.75 | 0.2167 |
To describe the combined muscle activation dynamics and joint motion, an AutoRegressive model with eXogenous input (ARX)) [5] (a linear dynamic transfer function model) is used:
where
In order to adapt them to an individual subject and muscle condition, I/O data are recorded during an identification experiment and a successive linear least squares optimization is performed yielding the optimal parameter set Θ* that minimizes the cost function
where ϑ[k] is the recorded joint angle.
To obtain I/O data, an experimental procedure is proposed in which the stimulation intensity is increased stepwise (five levels, linear increase of the intensity) to the upper well tolerated intensity. During the time periods in which the stimulation intensity remains constant (lasting always 6 s), the subject is instructed to voluntarily elevate his arm to a given joint angle of approximately 50° for 2 s.
4 Results
The proposed experimental procedure has been performed twice for two healthy subjects yielding one training and one validation data-set for each subject.
The model parameters were identified and the output ϑ of the obtained model was then simulated (not predicted) for the inputs of the training dataset and compared to the measured output to asses the model fit. The result in terms of the Root Mean Square Error (RMS) is 3.3° for subject A and 2.67° for subject B.
To validate the model, the inputs of the validation dataset are used to simulate the output of the obtained model. The input signals as well as the simulated and measured output angle are shown in Fig. 4 and Fig. 5 for both subjects. In this validation, RMS errors of 3.56° and 3.44°for subject A and subject B have been obtained, respectively.
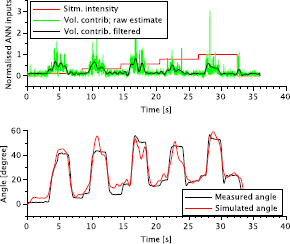
Result of the model validation for subject A.

Result of the model validation for subject B.
5 Conclusion
For the prediction and simulation of joint angle movements, an ANN-based dynamical model has been developed and tested in two healthy subjects. The obtained small RMS errors – both for model fit and validation – show the feasibility of the proposed joint angle prediction in the considered joint angle range of about 50 degree. The required time duration of approximately half a minute for the identification procedure is feasible to the time constraints in clinical environments. The observed model accuracy is high despite using a Hammerstein model structure that is usually applied to describe isometric muscle contractions only. A Hill-type muscle model structure can be considered as extension to this approach in case that the accuracy of the proposed model decreases for larger joint angle ranges.
Potential applications include the adaption of FES-support in trial to trial based training procedures. The primary target application will be the estimation of the voluntary activity. Therefor, we propose an input observer using the previously identified model that inversely calculates the input by using the known stimulation intensityv and the joint angle ϑ that can both be measured with low noise amplitude e.g. by means of inertial motion units (IMUs). The obtained model accuracy should be sufficient for the given applications.
Concerning the long-term accuracy, however, we expect difficulties caused by time-variances in the muscle’s behavior. Herein, important factors are the rapidly progressing muscle fatigue under FES and in case of stroke patients, a potential time-variant spasticity. To tackle these issues, we propose a periodic re-calibration of the model in trial to trial based training procedures. Therefor, we expect that I/O data obtained during FES-supported training for motor re-learning are also feasible to allow the parameter estimation. Another approach, worth to be investigated, would be a parameter estimation using Recursive Least Squares (RLS) during training. Both approaches would not require interventions or additional effort to be performed during training sessions.
Future work also considers multiple muscles acting on one joint and, finally, investigations in stroke and incomplete spinal cord injured patients are planned.
Funding: The research leading to these results has been funded by the German Federal Ministry of Education and Research (BMBF) within the project BeMobil (FKZ 16SV7069K).
Author’s Statement
Conflict of interest: Authors state no conflict of interest. Material and Methods: Informed consent: Informed consent has been obtained from all individuals included in this study. Ethical approval: The research related to human use has been complied with all the relevant national regulations, institutional policies and in accordance the tenets of the Helsinki Declaration, and has been approved by the authors’ institutional review board or equivalent committee.
References
[1] E. Ambrosini, S. Ferrante, T. Schauer, C. Klauer, M. Gaffuri, G. Ferrigno, and A. Pedrocchi. A myocontrolled neuropros-thesis integrated with a passive exoskeleton to support upper limb activities. Journal of Electromyography & Kinesiology, 24(2):307–317, 2014.10.1016/j.jelekin.2014.01.006Search in Google Scholar
[2] E. Ambrosini, T. Schauer, C. Klauer, A. Pedrocchi, G. Ferrigno, and S. Ferrante. Control system for neuro-prostheses integrating induced and volitional effort. In Proc. of 9th IFAC Symposium on Biological and Medical Systems, BMS 2015, Berlin, Germany, 2015.Search in Google Scholar
[3] Z. Li, M. Hayashibe, C. Fattal, and D. Guiraud. Muscle fatigue tracking with evoked EMG via recurrent neural network: toward personalized neuroprosthetics. Computational Intelligence Magazine, IEEE, 9(2):38–46, 2014.10.1109/MCI.2014.2307224Search in Google Scholar
[4] D. G. Lloyd and T. F. Besier. An EMG-driven musculoskeletal model to estimate muscle forces and knee joint moments in vivo. Journal of biomechanics, 36(6):765–776, 2003.10.1016/S0021-9290(03)00010-1Search in Google Scholar
[5] O. Nelles. Nonlinear system identification: from classical approaches to neural networks and fuzzy models. Springer Verlag, 2001.10.1007/978-3-662-04323-3Search in Google Scholar
[6] R. Shalaby. Development of an Electromyography Detection System for the Control of Functional Electrical Stimulation in Neurological Rehabilitation. PhD thesis, Technische Universität Berlin, 2011.Search in Google Scholar
[7] L. R. Sheffler and J. Chae. Neuromuscular electrical stimulation in neurorehabilitation. Muscle & nerve, 35(5):562–590, 2007.10.1002/mus.20758Search in Google Scholar PubMed
© 2015 by Walter de Gruyter GmbH, Berlin/Boston
This article is distributed under the terms of the Creative Commons Attribution Non-Commercial License, which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Articles in the same Issue
- Research Article
- Development and characterization of superparamagnetic coatings
- Research Article
- The development of an experimental setup to measure acousto-electric interaction signal
- Research Article
- Stability analysis of ferrofluids
- Research Article
- Investigation of endothelial growth using a sensors-integrated microfluidic system to simulate physiological barriers
- Research Article
- Energy harvesting for active implants: powering a ruminal pH-monitoring system
- Research Article
- New type of fluxgate magnetometer for the heart’s magnetic fields detection
- Research Article
- Field mapping of ballistic pressure pulse sources
- Research Article
- Development of a new homecare sleep monitor using body sounds and motion tracking
- Research Article
- Noise properties of textile, capacitive EEG electrodes
- Research Article
- Detecting phase singularities and rotor center trajectories based on the Hilbert transform of intraatrial electrograms in an atrial voxel model
- Research Article
- Spike sorting: the overlapping spikes challenge
- Research Article
- Separating the effect of respiration from the heart rate variability for cases of constant harmonic breathing
- Research Article
- Locating regions of arrhythmogenic substrate by analyzing the duration of triggered atrial activities
- Research Article
- Combining different ECG derived respiration tracking methods to create an optimal reconstruction of the breathing pattern
- Research Article
- Atrial and ventricular signal averaging electrocardiography in pacemaker and cardiac resynchronization therapy
- Research Article
- Estimation of a respiratory signal from a single-lead ECG using the 4th order central moments
- Research Article
- Compressed sensing of multi-lead ECG signals by compressive multiplexing
- Research Article
- Heart rate monitoring in ultra-high-field MRI using frequency information obtained from video signals of the human skin compared to electrocardiography and pulse oximetry
- Research Article
- Synchronization in wireless biomedical-sensor networks with Bluetooth Low Energy
- Research Article
- Automated classification of stages of anaesthesia by populations of evolutionary optimized fuzzy rules
- Research Article
- Effects of sampling rate on automated fatigue recognition in surface EMG signals
- Research Article
- Closed-loop transcranial alternating current stimulation of slow oscillations
- Research Article
- Cardiac index in atrio- and interventricular delay optimized cardiac resynchronization therapy and cardiac contractility modulation
- Research Article
- The role of expert evaluation for microsleep detection
- Research Article
- The impact of baseline wander removal techniques on the ST segment in simulated ischemic 12-lead ECGs
- Research Article
- Metal artifact reduction by projection replacements and non-local prior image integration
- Research Article
- A novel coaxial nozzle for in-process adjustment of electrospun scaffolds’ fiber diameter
- Research Article
- Processing of membranes for oxygenation using the Bellhouse-effect
- Research Article
- Inkjet printing of viable human dental follicle stem cells
- Research Article
- The use of an icebindingprotein out of the snowflea Hypogastrura harveyi as a cryoprotectant in the cryopreservation of mesenchymal stem cells
- Research Article
- New NIR spectroscopy based method to determine ischemia in vivo in liver – a first study on rats
- Research Article
- QRS and QT ventricular conduction times and permanent pacemaker therapy after transcatheter aortic valve implantation
- Research Article
- Adopting oculopressure tonometry as a transient in vivo rabbit glaucoma model
- Research Article
- Next-generation vision testing: the quick CSF
- Research Article
- Improving tactile sensation in laparoscopic surgery by overcoming size restrictions
- Research Article
- Design and control of a 3-DOF hydraulic driven surgical instrument
- Research Article
- Evaluation of endourological tools to improve the diagnosis and therapy of ureteral tumors – from model development to clinical application
- Research Article
- Frequency based assessment of surgical activities
- Research Article
- “Hands free for intervention”, a new approach for transoral endoscopic surgery
- Research Article
- Pseudo-haptic feedback in medical teleoperation
- Research Article
- Feasibility of interactive gesture control of a robotic microscope
- Research Article
- Towards structuring contextual information for workflow-driven surgical assistance functionalities
- Research Article
- Towards a framework for standardized semantic workflow modeling and management in the surgical domain
- Research Article
- Closed-loop approach for situation awareness of medical devices and operating room infrastructure
- Research Article
- Kinect based physiotherapy system for home use
- Research Article
- Evaluating the microsoft kinect skeleton joint tracking as a tool for home-based physiotherapy
- Research Article
- Integrating multimodal information for intraoperative assistance in neurosurgery
- Research Article
- Respiratory motion tracking using Microsoft’s Kinect v2 camera
- Research Article
- Using smart glasses for ultrasound diagnostics
- Research Article
- Measurement of needle susceptibility artifacts in magnetic resonance images
- Research Article
- Dimensionality reduction of medical image descriptors for multimodal image registration
- Research Article
- Experimental evaluation of different weighting schemes in magnetic particle imaging reconstruction
- Research Article
- Evaluation of CT capability for the detection of thin bone structures
- Research Article
- Towards contactless optical coherence elastography with acoustic tissue excitation
- Research Article
- Development and implementation of algorithms for automatic and robust measurement of the 2D:4D digit ratio using image data
- Research Article
- Automated high-throughput analysis of B cell spreading on immobilized antibodies with whole slide imaging
- Research Article
- Tissue segmentation from head MRI: a ground truth validation for feature-enhanced tracking
- Research Article
- Video tracking of swimming rodents on a reflective water surface
- Research Article
- MR imaging of model drug distribution in simulated vitreous
- Research Article
- Studying the extracellular contribution to the double wave vector diffusion-weighted signal
- Research Article
- Artifacts in field free line magnetic particle imaging in the presence of inhomogeneous and nonlinear magnetic fields
- Research Article
- Introducing a frequency-tunable magnetic particle spectrometer
- Research Article
- Imaging of aortic valve dynamics in 4D OCT
- Research Article
- Intravascular optical coherence tomography (OCT) as an additional tool for the assessment of stent structures
- Research Article
- Simple concept for a wide-field lensless digital holographic microscope using a laser diode
- Research Article
- Intraoperative identification of somato-sensory brain areas using optical imaging and standard RGB camera equipment – a feasibility study
- Research Article
- Respiratory surface motion measurement by Microsoft Kinect
- Research Article
- Improving image quality in EIT imaging by measurement of thorax excursion
- Research Article
- A clustering based dual model framework for EIT imaging: first experimental results
- Research Article
- Three-dimensional anisotropic regularization for limited angle tomography
- Research Article
- GPU-based real-time generation of large ultrasound volumes from freehand 3D sweeps
- Research Article
- Experimental computer tomograph
- Research Article
- US-tracked steered FUS in a respiratory ex vivo ovine liver phantom
- Research Article
- Contribution of brownian rotation and particle assembly polarisation to the particle response in magnetic particle spectrometry
- Research Article
- Preliminary investigations of magnetic modulated nanoparticles for microwave breast cancer detection
- Research Article
- Construction of a device for magnetic separation of superparamagnetic iron oxide nanoparticles
- Research Article
- An IHE-conform telecooperation platform supporting the treatment of dementia patients
- Research Article
- Automated respiratory therapy system based on the ARDSNet protocol with systemic perfusion control
- Research Article
- Identification of surgical instruments using UHF-RFID technology
- Research Article
- A generic concept for the development of model-guided clinical decision support systems
- Research Article
- Evaluation of local alterations in femoral bone mineral density measured via quantitative CT
- Research Article
- Creating 3D gelatin phantoms for experimental evaluation in biomedicine
- Research Article
- Influence of short-term fixation with mixed formalin or ethanol solution on the mechanical properties of human cortical bone
- Research Article
- Analysis of the release kinetics of surface-bound proteins via laser-induced fluorescence
- Research Article
- Tomographic particle image velocimetry of a water-jet for low volume harvesting of fat tissue for regenerative medicine
- Research Article
- Wireless medical sensors – context, robustness and safety
- Research Article
- Sequences for real-time magnetic particle imaging
- Research Article
- Speckle-based off-axis holographic detection for non-contact photoacoustic tomography
- Research Article
- A machine learning approach for planning valve-sparing aortic root reconstruction
- Research Article
- An in-ear pulse wave velocity measurement system using heart sounds as time reference
- Research Article
- Measuring different oxygenation levels in a blood perfusion model simulating the human head using NIRS
- Research Article
- Multisegmental fusion of the lumbar spine a curse or a blessing?
- Research Article
- Numerical analysis of the biomechanical complications accompanying the total hip replacement with NANOS-Prosthetic: bone remodelling and prosthesis migration
- Research Article
- A muscle model for hybrid muscle activation
- Research Article
- Mathematical, numerical and in-vitro investigation of cooling performance of an intra-carotid catheter for selective brain hypothermia
- Research Article
- An ideally parameterized unscented Kalman filter for the inverse problem of electrocardiography
- Research Article
- Interactive visualization of cardiac anatomy and atrial excitation for medical diagnosis and research
- Research Article
- Virtualizing clinical cases of atrial flutter in a fast marching simulation including conduction velocity and ablation scars
- Research Article
- Mesh structure-independent modeling of patient-specific atrial fiber orientation
- Research Article
- Accelerating mono-domain cardiac electrophysiology simulations using OpenCL
- Research Article
- Understanding the cellular mode of action of vernakalant using a computational model: answers and new questions
- Research Article
- A java based simulator with user interface to simulate ventilated patients
- Research Article
- Evaluation of an algorithm to choose between competing models of respiratory mechanics
- Research Article
- Numerical simulation of low-pulsation gerotor pumps for use in the pharmaceutical industry and in biomedicine
- Research Article
- Numerical and experimental flow analysis in centifluidic systems for rapid allergy screening tests
- Research Article
- Biomechanical parameter determination of scaffold-free cartilage constructs (SFCCs) with the hyperelastic material models Yeoh, Ogden and Demiray
- Research Article
- FPGA controlled artificial vascular system
- Research Article
- Simulation based investigation of source-detector configurations for non-invasive fetal pulse oximetry
- Research Article
- Test setup for characterizing the efficacy of embolic protection devices
- Research Article
- Impact of electrode geometry on force generation during functional electrical stimulation
- Research Article
- 3D-based visual physical activity assessment of children
- Research Article
- Realtime assessment of foot orientation by Accelerometers and Gyroscopes
- Research Article
- Image based reconstruction for cystoscopy
- Research Article
- Image guided surgery innovation with graduate students - a new lecture format
- Research Article
- Multichannel FES parameterization for controlling foot motion in paretic gait
- Research Article
- Smartphone supported upper limb prosthesis
- Research Article
- Use of quantitative tremor evaluation to enhance target selection during deep brain stimulation surgery for essential tremor
- Research Article
- Evaluation of adhesion promoters for Parylene C on gold metallization
- Research Article
- The influence of metallic ions from CoCr28Mo6 on the osteogenic differentiation and cytokine release of human osteoblasts
- Research Article
- Increasing the visibility of thin NITINOL vascular implants
- Research Article
- Possible reasons for early artificial bone failure in biomechanical tests of ankle arthrodesis systems
- Research Article
- Development of a bending test procedure for the characterization of flexible ECoG electrode arrays
- Research Article
- Tubular manipulators: a new concept for intracochlear positioning of an auditory prosthesis
- Research Article
- Investigation of the dynamic diameter deformation of vascular stents during fatigue testing with radial loading
- Research Article
- Electrospun vascular grafts with anti-kinking properties
- Research Article
- Integration of temperature sensors in polyimide-based thin-film electrode arrays
- Research Article
- Use cases and usability challenges for head-mounted displays in healthcare
- Research Article
- Device- and service profiles for integrated or systems based on open standards
- Research Article
- Risk management for medical devices in research projects
- Research Article
- Simulation of varying femoral attachment sites of medial patellofemoral ligament using a musculoskeletal multi-body model
- Research Article
- Does enhancing consciousness for strategic planning processes support the effectiveness of problem-based learning concepts in biomedical education?
- Research Article
- SPIO processing in macrophages for MPI: The breast cancer MPI-SNLB-concept
- Research Article
- Numerical simulations of airflow in the human pharynx of OSAHS patients
Articles in the same Issue
- Research Article
- Development and characterization of superparamagnetic coatings
- Research Article
- The development of an experimental setup to measure acousto-electric interaction signal
- Research Article
- Stability analysis of ferrofluids
- Research Article
- Investigation of endothelial growth using a sensors-integrated microfluidic system to simulate physiological barriers
- Research Article
- Energy harvesting for active implants: powering a ruminal pH-monitoring system
- Research Article
- New type of fluxgate magnetometer for the heart’s magnetic fields detection
- Research Article
- Field mapping of ballistic pressure pulse sources
- Research Article
- Development of a new homecare sleep monitor using body sounds and motion tracking
- Research Article
- Noise properties of textile, capacitive EEG electrodes
- Research Article
- Detecting phase singularities and rotor center trajectories based on the Hilbert transform of intraatrial electrograms in an atrial voxel model
- Research Article
- Spike sorting: the overlapping spikes challenge
- Research Article
- Separating the effect of respiration from the heart rate variability for cases of constant harmonic breathing
- Research Article
- Locating regions of arrhythmogenic substrate by analyzing the duration of triggered atrial activities
- Research Article
- Combining different ECG derived respiration tracking methods to create an optimal reconstruction of the breathing pattern
- Research Article
- Atrial and ventricular signal averaging electrocardiography in pacemaker and cardiac resynchronization therapy
- Research Article
- Estimation of a respiratory signal from a single-lead ECG using the 4th order central moments
- Research Article
- Compressed sensing of multi-lead ECG signals by compressive multiplexing
- Research Article
- Heart rate monitoring in ultra-high-field MRI using frequency information obtained from video signals of the human skin compared to electrocardiography and pulse oximetry
- Research Article
- Synchronization in wireless biomedical-sensor networks with Bluetooth Low Energy
- Research Article
- Automated classification of stages of anaesthesia by populations of evolutionary optimized fuzzy rules
- Research Article
- Effects of sampling rate on automated fatigue recognition in surface EMG signals
- Research Article
- Closed-loop transcranial alternating current stimulation of slow oscillations
- Research Article
- Cardiac index in atrio- and interventricular delay optimized cardiac resynchronization therapy and cardiac contractility modulation
- Research Article
- The role of expert evaluation for microsleep detection
- Research Article
- The impact of baseline wander removal techniques on the ST segment in simulated ischemic 12-lead ECGs
- Research Article
- Metal artifact reduction by projection replacements and non-local prior image integration
- Research Article
- A novel coaxial nozzle for in-process adjustment of electrospun scaffolds’ fiber diameter
- Research Article
- Processing of membranes for oxygenation using the Bellhouse-effect
- Research Article
- Inkjet printing of viable human dental follicle stem cells
- Research Article
- The use of an icebindingprotein out of the snowflea Hypogastrura harveyi as a cryoprotectant in the cryopreservation of mesenchymal stem cells
- Research Article
- New NIR spectroscopy based method to determine ischemia in vivo in liver – a first study on rats
- Research Article
- QRS and QT ventricular conduction times and permanent pacemaker therapy after transcatheter aortic valve implantation
- Research Article
- Adopting oculopressure tonometry as a transient in vivo rabbit glaucoma model
- Research Article
- Next-generation vision testing: the quick CSF
- Research Article
- Improving tactile sensation in laparoscopic surgery by overcoming size restrictions
- Research Article
- Design and control of a 3-DOF hydraulic driven surgical instrument
- Research Article
- Evaluation of endourological tools to improve the diagnosis and therapy of ureteral tumors – from model development to clinical application
- Research Article
- Frequency based assessment of surgical activities
- Research Article
- “Hands free for intervention”, a new approach for transoral endoscopic surgery
- Research Article
- Pseudo-haptic feedback in medical teleoperation
- Research Article
- Feasibility of interactive gesture control of a robotic microscope
- Research Article
- Towards structuring contextual information for workflow-driven surgical assistance functionalities
- Research Article
- Towards a framework for standardized semantic workflow modeling and management in the surgical domain
- Research Article
- Closed-loop approach for situation awareness of medical devices and operating room infrastructure
- Research Article
- Kinect based physiotherapy system for home use
- Research Article
- Evaluating the microsoft kinect skeleton joint tracking as a tool for home-based physiotherapy
- Research Article
- Integrating multimodal information for intraoperative assistance in neurosurgery
- Research Article
- Respiratory motion tracking using Microsoft’s Kinect v2 camera
- Research Article
- Using smart glasses for ultrasound diagnostics
- Research Article
- Measurement of needle susceptibility artifacts in magnetic resonance images
- Research Article
- Dimensionality reduction of medical image descriptors for multimodal image registration
- Research Article
- Experimental evaluation of different weighting schemes in magnetic particle imaging reconstruction
- Research Article
- Evaluation of CT capability for the detection of thin bone structures
- Research Article
- Towards contactless optical coherence elastography with acoustic tissue excitation
- Research Article
- Development and implementation of algorithms for automatic and robust measurement of the 2D:4D digit ratio using image data
- Research Article
- Automated high-throughput analysis of B cell spreading on immobilized antibodies with whole slide imaging
- Research Article
- Tissue segmentation from head MRI: a ground truth validation for feature-enhanced tracking
- Research Article
- Video tracking of swimming rodents on a reflective water surface
- Research Article
- MR imaging of model drug distribution in simulated vitreous
- Research Article
- Studying the extracellular contribution to the double wave vector diffusion-weighted signal
- Research Article
- Artifacts in field free line magnetic particle imaging in the presence of inhomogeneous and nonlinear magnetic fields
- Research Article
- Introducing a frequency-tunable magnetic particle spectrometer
- Research Article
- Imaging of aortic valve dynamics in 4D OCT
- Research Article
- Intravascular optical coherence tomography (OCT) as an additional tool for the assessment of stent structures
- Research Article
- Simple concept for a wide-field lensless digital holographic microscope using a laser diode
- Research Article
- Intraoperative identification of somato-sensory brain areas using optical imaging and standard RGB camera equipment – a feasibility study
- Research Article
- Respiratory surface motion measurement by Microsoft Kinect
- Research Article
- Improving image quality in EIT imaging by measurement of thorax excursion
- Research Article
- A clustering based dual model framework for EIT imaging: first experimental results
- Research Article
- Three-dimensional anisotropic regularization for limited angle tomography
- Research Article
- GPU-based real-time generation of large ultrasound volumes from freehand 3D sweeps
- Research Article
- Experimental computer tomograph
- Research Article
- US-tracked steered FUS in a respiratory ex vivo ovine liver phantom
- Research Article
- Contribution of brownian rotation and particle assembly polarisation to the particle response in magnetic particle spectrometry
- Research Article
- Preliminary investigations of magnetic modulated nanoparticles for microwave breast cancer detection
- Research Article
- Construction of a device for magnetic separation of superparamagnetic iron oxide nanoparticles
- Research Article
- An IHE-conform telecooperation platform supporting the treatment of dementia patients
- Research Article
- Automated respiratory therapy system based on the ARDSNet protocol with systemic perfusion control
- Research Article
- Identification of surgical instruments using UHF-RFID technology
- Research Article
- A generic concept for the development of model-guided clinical decision support systems
- Research Article
- Evaluation of local alterations in femoral bone mineral density measured via quantitative CT
- Research Article
- Creating 3D gelatin phantoms for experimental evaluation in biomedicine
- Research Article
- Influence of short-term fixation with mixed formalin or ethanol solution on the mechanical properties of human cortical bone
- Research Article
- Analysis of the release kinetics of surface-bound proteins via laser-induced fluorescence
- Research Article
- Tomographic particle image velocimetry of a water-jet for low volume harvesting of fat tissue for regenerative medicine
- Research Article
- Wireless medical sensors – context, robustness and safety
- Research Article
- Sequences for real-time magnetic particle imaging
- Research Article
- Speckle-based off-axis holographic detection for non-contact photoacoustic tomography
- Research Article
- A machine learning approach for planning valve-sparing aortic root reconstruction
- Research Article
- An in-ear pulse wave velocity measurement system using heart sounds as time reference
- Research Article
- Measuring different oxygenation levels in a blood perfusion model simulating the human head using NIRS
- Research Article
- Multisegmental fusion of the lumbar spine a curse or a blessing?
- Research Article
- Numerical analysis of the biomechanical complications accompanying the total hip replacement with NANOS-Prosthetic: bone remodelling and prosthesis migration
- Research Article
- A muscle model for hybrid muscle activation
- Research Article
- Mathematical, numerical and in-vitro investigation of cooling performance of an intra-carotid catheter for selective brain hypothermia
- Research Article
- An ideally parameterized unscented Kalman filter for the inverse problem of electrocardiography
- Research Article
- Interactive visualization of cardiac anatomy and atrial excitation for medical diagnosis and research
- Research Article
- Virtualizing clinical cases of atrial flutter in a fast marching simulation including conduction velocity and ablation scars
- Research Article
- Mesh structure-independent modeling of patient-specific atrial fiber orientation
- Research Article
- Accelerating mono-domain cardiac electrophysiology simulations using OpenCL
- Research Article
- Understanding the cellular mode of action of vernakalant using a computational model: answers and new questions
- Research Article
- A java based simulator with user interface to simulate ventilated patients
- Research Article
- Evaluation of an algorithm to choose between competing models of respiratory mechanics
- Research Article
- Numerical simulation of low-pulsation gerotor pumps for use in the pharmaceutical industry and in biomedicine
- Research Article
- Numerical and experimental flow analysis in centifluidic systems for rapid allergy screening tests
- Research Article
- Biomechanical parameter determination of scaffold-free cartilage constructs (SFCCs) with the hyperelastic material models Yeoh, Ogden and Demiray
- Research Article
- FPGA controlled artificial vascular system
- Research Article
- Simulation based investigation of source-detector configurations for non-invasive fetal pulse oximetry
- Research Article
- Test setup for characterizing the efficacy of embolic protection devices
- Research Article
- Impact of electrode geometry on force generation during functional electrical stimulation
- Research Article
- 3D-based visual physical activity assessment of children
- Research Article
- Realtime assessment of foot orientation by Accelerometers and Gyroscopes
- Research Article
- Image based reconstruction for cystoscopy
- Research Article
- Image guided surgery innovation with graduate students - a new lecture format
- Research Article
- Multichannel FES parameterization for controlling foot motion in paretic gait
- Research Article
- Smartphone supported upper limb prosthesis
- Research Article
- Use of quantitative tremor evaluation to enhance target selection during deep brain stimulation surgery for essential tremor
- Research Article
- Evaluation of adhesion promoters for Parylene C on gold metallization
- Research Article
- The influence of metallic ions from CoCr28Mo6 on the osteogenic differentiation and cytokine release of human osteoblasts
- Research Article
- Increasing the visibility of thin NITINOL vascular implants
- Research Article
- Possible reasons for early artificial bone failure in biomechanical tests of ankle arthrodesis systems
- Research Article
- Development of a bending test procedure for the characterization of flexible ECoG electrode arrays
- Research Article
- Tubular manipulators: a new concept for intracochlear positioning of an auditory prosthesis
- Research Article
- Investigation of the dynamic diameter deformation of vascular stents during fatigue testing with radial loading
- Research Article
- Electrospun vascular grafts with anti-kinking properties
- Research Article
- Integration of temperature sensors in polyimide-based thin-film electrode arrays
- Research Article
- Use cases and usability challenges for head-mounted displays in healthcare
- Research Article
- Device- and service profiles for integrated or systems based on open standards
- Research Article
- Risk management for medical devices in research projects
- Research Article
- Simulation of varying femoral attachment sites of medial patellofemoral ligament using a musculoskeletal multi-body model
- Research Article
- Does enhancing consciousness for strategic planning processes support the effectiveness of problem-based learning concepts in biomedical education?
- Research Article
- SPIO processing in macrophages for MPI: The breast cancer MPI-SNLB-concept
- Research Article
- Numerical simulations of airflow in the human pharynx of OSAHS patients