Improving tactile sensation in laparoscopic surgery by overcoming size restrictions
-
 ,
,

Abstract
Hepatic tumors appear as stiff inclusions within the surrounding soft, healthy tissue. In open surgery they are searched for by manual palpation with the gloved fingertip. However, to exploit the benefits of MIS it is mandatory to implement a substitution for the human sense of touch. Therefore, a tactile instrument has been developed with the aim of enlarging the sensing area at the tool tip once it enters the abdominal cavity through the trocar. The provision of a large sensitive surface enables the detection of nearly all sizes of tumors and decreases the time needed for the performance of this task. A prototype was manufactured by laser sintering in PA serving as a carrier for an existing flexible silicone sensor. Automated as well as manual subject palpation tests have shown that a prototypical instrument with a laterally opening lid would be a suitable device for tumor detection in laparoscopic liver surgery.
1 Introduction
Minimally invasive surgery is often preferred to an open procedure to reduce trauma, haemorrhage and recovery time for the patient. The diagnosis and localization of liver tumors, however, is performed by stroking across the surface of the diseased organ as the cancerous nodes can be felt as stiff inclusions within the soft, healthy tissue. Due to the sealed peritoneum with only small access ports at the trocars this method cannot be adopted in laparoscopy. Therefore, tactile probes have been developed by different research groups, e.g. Trejos [1] and Schostek [2]. However, they all exploit merely the limited space determined by the diameter of a 10mm trocar as the sensor unit of these devices is simply placed at the tip of a long slender probe without a mechanism for enlargement of the palpation area.
Therefore, a laparoscopic instrument equipped with a laterally opening lid has been developed to provide a large sensitive area for palpation of hepatic cancerous lumps. Mechanical requirements have been determined as guidelines for the design. Thereby, the most important target was to create a large sensing area despite the size constraints of a 10mm trocar. Furthermore, it was prescribed to keep the mechanics as simple as possible to maintain low effort and costs for manufacturing. Storage for the sensor unit plus the associated electronics had to be provided within the concept and, additionally, the design had to combine compliance and rigidity, thus, a solid structure around the flexible sensor as palpation would otherwise not be possible.
The prototypical version laser sintered in polyamide (PA) is pictured in Figure 1. Its diameter is 10 mm in the closed state so that it fits through a standard trocar. However, when opened it provides a tactile surface of 18 mm × 20 mm which is unique in terms of minimally invasive tactile tools. The prototype could already be used for test series to evaluate the suitability of the innovative construction.
2 Experiments
During the experimental phase automated and manual subject palpation tests were performed to evaluate the innovative instrument design which was selected out of various concepts. Therefore, a flexible silicone sensor developed by Strohmayr [3] was mounted to the tip of the prototypical tool. The sensory system consists of two silicone foil substrates which both carry parallel polymer based circuit tracks (PBCTs) including conductive particles. By merging the two layers the orthogonally arranged PBCTs create crossing points, so called tactile sensing elements or taxels. Thus, an externally applied force can be measured according to the decrease of resistivity between the approximated conductive lines as it can be seen in Figure 2. For restoring the original state of the sensor after an indentation polymer spacers are located within the empty spaces of the PBCT lattice structure.
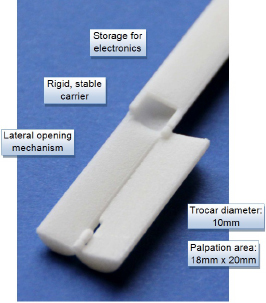
A prototypical version of the laparoscopic instrument was laser sintered in polyamide (PA). It provides storage for the electronic parts of the sensor, e.g. the wires, a rigid carrier for the sensory unit and a laterall opening mechanism for enlargement of the palaption area despite the size restrictions of the trocar.
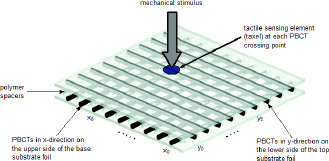
The detection of externally applied forces with the flexible silicone sensor is based on a decrease of resistivity through the approximation of the conductive polymer based circuit tracks (PBCTs) at their crossing points (taxel).
For the testing phase the sensor was attached to the mechanical part of the instrument by use of a nonconductive adhesive tape in order to avoid unintended contact of the PBCTs among each other. For the automated test series the prototype was mounted onto a linear rail. Tumor samples were created on the base of the research of Fröhlich [4] by equipping soft silicone as well as porcine liver specimen with hard silicone nodules. They were placed directly underneath the tactile area of the tool and on top of a scale so that the forces which have been applied during the palpation tests could subsequently be calculated from the gathered weight data. The instrument was automatically driven down onto the tumor samples for palpation as it can be seen in Figure 3. Thereby, the sensor signals were recorded so that they could later be processed in MATLAB and displayed within a 3D bar graph array for better visualization of the effects occurring at the sensory tool tip. Finally, the data has been evaluated and compared for different tumor sample sizes and positions.

The prototypical tactile instrument was mounted to a linear rail for automated palpation tests on soft silicone and liver samples equipped with artificial tumor inclusions made of hard silicone.
The setup for the manually performed palpation tests is pictured in Figure 4. Subjects were asked to explore liver samples equipped with three or four artificial tumors using the tactile instrument. Their task was to determine the number of hidden lumps by interpreting the sensor signal displayed on a screen in front of them in real time. Moreover, they were asked to rate their confidence about the detection of a tumor and to assess the handling of the tool. In addition, the time which elapsed until the detection of a lump was noted for each candidate. The samples have again been placed on top of a scale so that the forces applied during manual palpation could be calculated from the collected weight data after the tests were completed.
3 Results
The sensor data recorded during the automated experiments was evaluated and displayed as a 3D color-coded bar graph. Blue color stands for low, red for high external load, thus, forces applied onto the sensor through palpation. As higher forces occur for higher spring constants at equal indentation depth stiff inclusions can be detected within the surrounding soft matrix by use of the developed

For the series of manual palpation tests the subjects were asked to detect the hidden tumors inside the liver samples by using the developed tactile tool. Therefore, the sensor data was displayed on a screen in real time besides the video image of the palpation field and the scale data.
tactile tool. Figure 5 shows the comparison of the results for a blank liver sample and one equipped with a hard silicone node (Shore A40, Ř 7 mm). Both images show sensor data acquired at an applied pressure of 4.0·10−3 N/mm2 which was calculated by use of the weight values and the size of the sensor area. It can clearly be seen that a stiff inclusion was present within the second sample as high values are present in the lower left corner and the middle of the bar graphs.
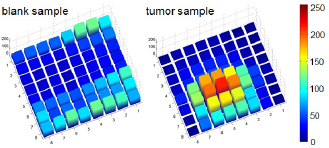
3D bar graphs showing the sensor output for palpation tests on hepatic specimen. It is obvious that the left graphic shows the results for a blank sample without an inclusion whereas the presence of a tumor can clearly be confirmed for the right graphic due to the increased values occuring at the taxels in the middle and the lower left corner of the sensor.
Moreover, the manually performed tests revealed that seven of the eight subjects localized all the artificial tumors hidden within the liver samples with high confidence as shown in Figure 6. They took 18s to 80s to find a lump and mostly described the handling as “intuitive” or “simple after getting used to”.
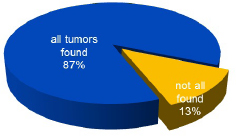
Seven out of eight subjects found all the artificial tumor lumps hidden within the hepatic specimen. Only one test person missed one of the inclusions.
Subjects had to figure out the optimal amount of pressure for palpation on their own to achieve a suitable sensor output. However, they all rapidly noticed that too little forces lead to improper or incomplete contact with the examined tissue, thus, to a weak and inexpressive signal. Furthermore, it was immediately recognized by all of the test persons that when forces were chosen too high, artifacts were caused within the visualized output. These “ghost” tumors could easily be excluded by reducing the load and consequently noticing the simultaneous decrease of the sensor signal over the complete area without any bar graphs remaining at high level. It was calculated that they generally applied pressure values between 6.37·10−3 N/mm2 and 6.51·10−3 N/mm2 with a median value of 6.48·10−3 N/mm2. For one of the subjects an extreme value of 8.15·10−3 N/mm2 was noted which is visualized as a cross above the boxplot in Figure 7.
4 Discussion and future work
The results of the automated palpation tests revealed that it was not possible to distinguish different sizes of stiff inclusions. Moreover, very small artificial nodes (Ř 3.5 mm) were not visible at all within the output signal of the sensor. This is due to the fact that the PBCTs of the sensor array are located in a distance of 2.5 mm which means that the resolution of the sensor is not high enough to recognize variations of only a few millimeters and small inclusions are not detected as they may be located in between the sensitive lines. It is important to improve the sensor resolution as especially tumors with a diameter less than 5 mm cannot be visualized by medical imaging [5].
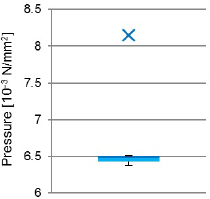
During the tests in which subjects utilized the prototypical tactile instrument for palpation pressure values between 6.37·10−3 N/mm2 and 6.51·10−3 N/mm2 have been recorded. Only one outlier occured at 8.15·10−3 N/mm2 for one subject.
Trejos et al. [6, 7] stated that with their tactile probe 4N were the optimal amount of force for the detection of hepatic cancer whereas 6N were the maximum load before damage occurred to the delicate tissue. For better comparability the associated pressure values were calculated based on the measurements of their sensitive tool tip. Hence, according to these parameters the optimal pressure is 16.7·10−3 N/mm2 and the maximum 25.0·10−3 N/mm2. Comparing these values to the data acquired during the test series with eight subjects using the instrument with the laterally opening lid it can be said that the new design requires less pressure to achieve suitable sensor signals for tumor detection. More precisely, the median pressure of the subject tests was only 38.8% of the optimal and 25.9% of the maximum determined pressure value. Even the extreme value was only half of the optimal pressure, thus, the applied palpation forces are not critical in terms of causing damage to the examined liver tissue.
It was noticed that artifacts or “ghost” tumors may occur when forces are too high during palpation. Although the test persons did not complain about this fact and were able to distinguish an artifact from a real hard inclusion it should be considered to integrate a warning system for future designs which informs the user about overabundantly applied pressure.
Furthermore, it must be taken into account that currently raw data has been used to create the 3D color-coded bar graphs as well as the real-time visualization of the sensor output for the subject tests. Other groups [1, 2, 8, 9] use filters and image processing to improve the outcome, however, for the experiments with the new laterally opening lid concept it was decided not to affect the acquired data in order to achieve genuine results.
Concerning the mechanical requirements mentioned at the beginning the mechanical structure of the developed instrument has to be enhanced with an articulating head in a future version. The long, slender laparoscopic devices are not easy to handle through the small ports provided by the trocars. Hence, the tool design must incorporate features such as articulating joints to simplify their maneuverability for the surgeon.
It has been shown that the basic mechanical design of the developed prototype can carry a tactile sensor that allows the detection and localization of hard silicone spheres (Shore A40) embedded in a soft silicone matrix and porcine liver specimen. Based on the promising results of this preliminary study a commercially available device can be implemented additionally taking biocompatibility and sterilizability into account. Furthermore, the sensor design must be adapted to the mechanical restrictions, e.g. the wires must run through the hollow shaft of the instrument and none of the sensor components may exceed the edges of the mechanical structure. This is especially important in the closed state of the device as it would otherwise not fit through a 10 mm trocar. Additionally, the tactile tool has to be adapted to the medical environment, e.g. the electronics must be compatible to the human body and vice versa.
Author’s Statement
Conflict of interest: Authors state no conflict of interest. Material and Methods: Informed consent: Informed consent has been obtained from all individuals included in this study. Ethical approval: The research related to human use has been complied with all the relevant national regulations, institutional policies and in accordance the tenets of the Helsinki Declaration, and has been approved by the authors’ institutional review board or equivalent committee.
References
[1] Trejos, A. A Sensorized Instrument for Minimally Invasive Surgery for the Measurement of Forces during Training and Surgery: Development and Applications. Dissertation. The University of Western Ontario 2012, 218 p.Search in Google Scholar
[2] Schostek, S. Taktile Sensorik in der laparoskopischen Chirurgie, Systementwicklung und experimentelle Evaluierung. Dissertation. Eberhard-Karls-Universität zu Tübingen 2010, 136 p.Search in Google Scholar
[3] Strohmayr, M.W. Artificial Skin in Robotics - A Comprehensive Interface for System-Environment Interaction. Dissertation. Karlsruher Institut für Technologie (KIT) 2012, 217 p.Search in Google Scholar
[4] Fröhlich, M. Towards realistic haptic organ phantoms for medical training on minimally invasive robotic surgery systems. Diploma thesis. Technical University Munich 2012, 115 p.Search in Google Scholar
[5] Perri, M., Trejos, A., Naish, M., et al. Short Papers System for Minimally Invasive Tumor Localization. IEEE/ASME Transactions on Mechatronics 2010, 15(6), p. 925 – 931Search in Google Scholar
[6] Trejos, A., Jayender, J., Perri, M., et al. Experimental Evaluation of Robot-Assisted Tactile Sensing for Minimally Invasive Surgery. IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics 2008, p. 971-97610.1109/BIOROB.2008.4762808Search in Google Scholar
[7] Trejos, A., Jayender, J., Perri, M., et al. Robot-Assisted Tactile Sensing for Minimally Invasive Tumor Localization.The International Journal of Robotics Research 2009, 28(9), p.1118-113310.1177/0278364909101136Search in Google Scholar
[8] Deml, B., Ortmaier, T., Seibold, U. The Touch and Feel in Minimally Invasive Surgery. IEEE International Workshop on Haptic Audio Visual Environments and their Applications, Ottawa 2005, p.33-3810.1109/HAVE.2005.1545648Search in Google Scholar
[9] Miller, A., Peine, W., Son, J., et al. Tactile Imaging System for Localizing Lung Nodules during Video Assisted Thoracoscopic Surgery. IEEE International Conference on Robotics and Automation 2007, p.2996-300110.1109/ROBOT.2007.363927Search in Google Scholar
© 2015 by Walter de Gruyter GmbH, Berlin/Boston
This article is distributed under the terms of the Creative Commons Attribution Non-Commercial License, which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Articles in the same Issue
- Research Article
- Development and characterization of superparamagnetic coatings
- Research Article
- The development of an experimental setup to measure acousto-electric interaction signal
- Research Article
- Stability analysis of ferrofluids
- Research Article
- Investigation of endothelial growth using a sensors-integrated microfluidic system to simulate physiological barriers
- Research Article
- Energy harvesting for active implants: powering a ruminal pH-monitoring system
- Research Article
- New type of fluxgate magnetometer for the heart’s magnetic fields detection
- Research Article
- Field mapping of ballistic pressure pulse sources
- Research Article
- Development of a new homecare sleep monitor using body sounds and motion tracking
- Research Article
- Noise properties of textile, capacitive EEG electrodes
- Research Article
- Detecting phase singularities and rotor center trajectories based on the Hilbert transform of intraatrial electrograms in an atrial voxel model
- Research Article
- Spike sorting: the overlapping spikes challenge
- Research Article
- Separating the effect of respiration from the heart rate variability for cases of constant harmonic breathing
- Research Article
- Locating regions of arrhythmogenic substrate by analyzing the duration of triggered atrial activities
- Research Article
- Combining different ECG derived respiration tracking methods to create an optimal reconstruction of the breathing pattern
- Research Article
- Atrial and ventricular signal averaging electrocardiography in pacemaker and cardiac resynchronization therapy
- Research Article
- Estimation of a respiratory signal from a single-lead ECG using the 4th order central moments
- Research Article
- Compressed sensing of multi-lead ECG signals by compressive multiplexing
- Research Article
- Heart rate monitoring in ultra-high-field MRI using frequency information obtained from video signals of the human skin compared to electrocardiography and pulse oximetry
- Research Article
- Synchronization in wireless biomedical-sensor networks with Bluetooth Low Energy
- Research Article
- Automated classification of stages of anaesthesia by populations of evolutionary optimized fuzzy rules
- Research Article
- Effects of sampling rate on automated fatigue recognition in surface EMG signals
- Research Article
- Closed-loop transcranial alternating current stimulation of slow oscillations
- Research Article
- Cardiac index in atrio- and interventricular delay optimized cardiac resynchronization therapy and cardiac contractility modulation
- Research Article
- The role of expert evaluation for microsleep detection
- Research Article
- The impact of baseline wander removal techniques on the ST segment in simulated ischemic 12-lead ECGs
- Research Article
- Metal artifact reduction by projection replacements and non-local prior image integration
- Research Article
- A novel coaxial nozzle for in-process adjustment of electrospun scaffolds’ fiber diameter
- Research Article
- Processing of membranes for oxygenation using the Bellhouse-effect
- Research Article
- Inkjet printing of viable human dental follicle stem cells
- Research Article
- The use of an icebindingprotein out of the snowflea Hypogastrura harveyi as a cryoprotectant in the cryopreservation of mesenchymal stem cells
- Research Article
- New NIR spectroscopy based method to determine ischemia in vivo in liver – a first study on rats
- Research Article
- QRS and QT ventricular conduction times and permanent pacemaker therapy after transcatheter aortic valve implantation
- Research Article
- Adopting oculopressure tonometry as a transient in vivo rabbit glaucoma model
- Research Article
- Next-generation vision testing: the quick CSF
- Research Article
- Improving tactile sensation in laparoscopic surgery by overcoming size restrictions
- Research Article
- Design and control of a 3-DOF hydraulic driven surgical instrument
- Research Article
- Evaluation of endourological tools to improve the diagnosis and therapy of ureteral tumors – from model development to clinical application
- Research Article
- Frequency based assessment of surgical activities
- Research Article
- “Hands free for intervention”, a new approach for transoral endoscopic surgery
- Research Article
- Pseudo-haptic feedback in medical teleoperation
- Research Article
- Feasibility of interactive gesture control of a robotic microscope
- Research Article
- Towards structuring contextual information for workflow-driven surgical assistance functionalities
- Research Article
- Towards a framework for standardized semantic workflow modeling and management in the surgical domain
- Research Article
- Closed-loop approach for situation awareness of medical devices and operating room infrastructure
- Research Article
- Kinect based physiotherapy system for home use
- Research Article
- Evaluating the microsoft kinect skeleton joint tracking as a tool for home-based physiotherapy
- Research Article
- Integrating multimodal information for intraoperative assistance in neurosurgery
- Research Article
- Respiratory motion tracking using Microsoft’s Kinect v2 camera
- Research Article
- Using smart glasses for ultrasound diagnostics
- Research Article
- Measurement of needle susceptibility artifacts in magnetic resonance images
- Research Article
- Dimensionality reduction of medical image descriptors for multimodal image registration
- Research Article
- Experimental evaluation of different weighting schemes in magnetic particle imaging reconstruction
- Research Article
- Evaluation of CT capability for the detection of thin bone structures
- Research Article
- Towards contactless optical coherence elastography with acoustic tissue excitation
- Research Article
- Development and implementation of algorithms for automatic and robust measurement of the 2D:4D digit ratio using image data
- Research Article
- Automated high-throughput analysis of B cell spreading on immobilized antibodies with whole slide imaging
- Research Article
- Tissue segmentation from head MRI: a ground truth validation for feature-enhanced tracking
- Research Article
- Video tracking of swimming rodents on a reflective water surface
- Research Article
- MR imaging of model drug distribution in simulated vitreous
- Research Article
- Studying the extracellular contribution to the double wave vector diffusion-weighted signal
- Research Article
- Artifacts in field free line magnetic particle imaging in the presence of inhomogeneous and nonlinear magnetic fields
- Research Article
- Introducing a frequency-tunable magnetic particle spectrometer
- Research Article
- Imaging of aortic valve dynamics in 4D OCT
- Research Article
- Intravascular optical coherence tomography (OCT) as an additional tool for the assessment of stent structures
- Research Article
- Simple concept for a wide-field lensless digital holographic microscope using a laser diode
- Research Article
- Intraoperative identification of somato-sensory brain areas using optical imaging and standard RGB camera equipment – a feasibility study
- Research Article
- Respiratory surface motion measurement by Microsoft Kinect
- Research Article
- Improving image quality in EIT imaging by measurement of thorax excursion
- Research Article
- A clustering based dual model framework for EIT imaging: first experimental results
- Research Article
- Three-dimensional anisotropic regularization for limited angle tomography
- Research Article
- GPU-based real-time generation of large ultrasound volumes from freehand 3D sweeps
- Research Article
- Experimental computer tomograph
- Research Article
- US-tracked steered FUS in a respiratory ex vivo ovine liver phantom
- Research Article
- Contribution of brownian rotation and particle assembly polarisation to the particle response in magnetic particle spectrometry
- Research Article
- Preliminary investigations of magnetic modulated nanoparticles for microwave breast cancer detection
- Research Article
- Construction of a device for magnetic separation of superparamagnetic iron oxide nanoparticles
- Research Article
- An IHE-conform telecooperation platform supporting the treatment of dementia patients
- Research Article
- Automated respiratory therapy system based on the ARDSNet protocol with systemic perfusion control
- Research Article
- Identification of surgical instruments using UHF-RFID technology
- Research Article
- A generic concept for the development of model-guided clinical decision support systems
- Research Article
- Evaluation of local alterations in femoral bone mineral density measured via quantitative CT
- Research Article
- Creating 3D gelatin phantoms for experimental evaluation in biomedicine
- Research Article
- Influence of short-term fixation with mixed formalin or ethanol solution on the mechanical properties of human cortical bone
- Research Article
- Analysis of the release kinetics of surface-bound proteins via laser-induced fluorescence
- Research Article
- Tomographic particle image velocimetry of a water-jet for low volume harvesting of fat tissue for regenerative medicine
- Research Article
- Wireless medical sensors – context, robustness and safety
- Research Article
- Sequences for real-time magnetic particle imaging
- Research Article
- Speckle-based off-axis holographic detection for non-contact photoacoustic tomography
- Research Article
- A machine learning approach for planning valve-sparing aortic root reconstruction
- Research Article
- An in-ear pulse wave velocity measurement system using heart sounds as time reference
- Research Article
- Measuring different oxygenation levels in a blood perfusion model simulating the human head using NIRS
- Research Article
- Multisegmental fusion of the lumbar spine a curse or a blessing?
- Research Article
- Numerical analysis of the biomechanical complications accompanying the total hip replacement with NANOS-Prosthetic: bone remodelling and prosthesis migration
- Research Article
- A muscle model for hybrid muscle activation
- Research Article
- Mathematical, numerical and in-vitro investigation of cooling performance of an intra-carotid catheter for selective brain hypothermia
- Research Article
- An ideally parameterized unscented Kalman filter for the inverse problem of electrocardiography
- Research Article
- Interactive visualization of cardiac anatomy and atrial excitation for medical diagnosis and research
- Research Article
- Virtualizing clinical cases of atrial flutter in a fast marching simulation including conduction velocity and ablation scars
- Research Article
- Mesh structure-independent modeling of patient-specific atrial fiber orientation
- Research Article
- Accelerating mono-domain cardiac electrophysiology simulations using OpenCL
- Research Article
- Understanding the cellular mode of action of vernakalant using a computational model: answers and new questions
- Research Article
- A java based simulator with user interface to simulate ventilated patients
- Research Article
- Evaluation of an algorithm to choose between competing models of respiratory mechanics
- Research Article
- Numerical simulation of low-pulsation gerotor pumps for use in the pharmaceutical industry and in biomedicine
- Research Article
- Numerical and experimental flow analysis in centifluidic systems for rapid allergy screening tests
- Research Article
- Biomechanical parameter determination of scaffold-free cartilage constructs (SFCCs) with the hyperelastic material models Yeoh, Ogden and Demiray
- Research Article
- FPGA controlled artificial vascular system
- Research Article
- Simulation based investigation of source-detector configurations for non-invasive fetal pulse oximetry
- Research Article
- Test setup for characterizing the efficacy of embolic protection devices
- Research Article
- Impact of electrode geometry on force generation during functional electrical stimulation
- Research Article
- 3D-based visual physical activity assessment of children
- Research Article
- Realtime assessment of foot orientation by Accelerometers and Gyroscopes
- Research Article
- Image based reconstruction for cystoscopy
- Research Article
- Image guided surgery innovation with graduate students - a new lecture format
- Research Article
- Multichannel FES parameterization for controlling foot motion in paretic gait
- Research Article
- Smartphone supported upper limb prosthesis
- Research Article
- Use of quantitative tremor evaluation to enhance target selection during deep brain stimulation surgery for essential tremor
- Research Article
- Evaluation of adhesion promoters for Parylene C on gold metallization
- Research Article
- The influence of metallic ions from CoCr28Mo6 on the osteogenic differentiation and cytokine release of human osteoblasts
- Research Article
- Increasing the visibility of thin NITINOL vascular implants
- Research Article
- Possible reasons for early artificial bone failure in biomechanical tests of ankle arthrodesis systems
- Research Article
- Development of a bending test procedure for the characterization of flexible ECoG electrode arrays
- Research Article
- Tubular manipulators: a new concept for intracochlear positioning of an auditory prosthesis
- Research Article
- Investigation of the dynamic diameter deformation of vascular stents during fatigue testing with radial loading
- Research Article
- Electrospun vascular grafts with anti-kinking properties
- Research Article
- Integration of temperature sensors in polyimide-based thin-film electrode arrays
- Research Article
- Use cases and usability challenges for head-mounted displays in healthcare
- Research Article
- Device- and service profiles for integrated or systems based on open standards
- Research Article
- Risk management for medical devices in research projects
- Research Article
- Simulation of varying femoral attachment sites of medial patellofemoral ligament using a musculoskeletal multi-body model
- Research Article
- Does enhancing consciousness for strategic planning processes support the effectiveness of problem-based learning concepts in biomedical education?
- Research Article
- SPIO processing in macrophages for MPI: The breast cancer MPI-SNLB-concept
- Research Article
- Numerical simulations of airflow in the human pharynx of OSAHS patients
Articles in the same Issue
- Research Article
- Development and characterization of superparamagnetic coatings
- Research Article
- The development of an experimental setup to measure acousto-electric interaction signal
- Research Article
- Stability analysis of ferrofluids
- Research Article
- Investigation of endothelial growth using a sensors-integrated microfluidic system to simulate physiological barriers
- Research Article
- Energy harvesting for active implants: powering a ruminal pH-monitoring system
- Research Article
- New type of fluxgate magnetometer for the heart’s magnetic fields detection
- Research Article
- Field mapping of ballistic pressure pulse sources
- Research Article
- Development of a new homecare sleep monitor using body sounds and motion tracking
- Research Article
- Noise properties of textile, capacitive EEG electrodes
- Research Article
- Detecting phase singularities and rotor center trajectories based on the Hilbert transform of intraatrial electrograms in an atrial voxel model
- Research Article
- Spike sorting: the overlapping spikes challenge
- Research Article
- Separating the effect of respiration from the heart rate variability for cases of constant harmonic breathing
- Research Article
- Locating regions of arrhythmogenic substrate by analyzing the duration of triggered atrial activities
- Research Article
- Combining different ECG derived respiration tracking methods to create an optimal reconstruction of the breathing pattern
- Research Article
- Atrial and ventricular signal averaging electrocardiography in pacemaker and cardiac resynchronization therapy
- Research Article
- Estimation of a respiratory signal from a single-lead ECG using the 4th order central moments
- Research Article
- Compressed sensing of multi-lead ECG signals by compressive multiplexing
- Research Article
- Heart rate monitoring in ultra-high-field MRI using frequency information obtained from video signals of the human skin compared to electrocardiography and pulse oximetry
- Research Article
- Synchronization in wireless biomedical-sensor networks with Bluetooth Low Energy
- Research Article
- Automated classification of stages of anaesthesia by populations of evolutionary optimized fuzzy rules
- Research Article
- Effects of sampling rate on automated fatigue recognition in surface EMG signals
- Research Article
- Closed-loop transcranial alternating current stimulation of slow oscillations
- Research Article
- Cardiac index in atrio- and interventricular delay optimized cardiac resynchronization therapy and cardiac contractility modulation
- Research Article
- The role of expert evaluation for microsleep detection
- Research Article
- The impact of baseline wander removal techniques on the ST segment in simulated ischemic 12-lead ECGs
- Research Article
- Metal artifact reduction by projection replacements and non-local prior image integration
- Research Article
- A novel coaxial nozzle for in-process adjustment of electrospun scaffolds’ fiber diameter
- Research Article
- Processing of membranes for oxygenation using the Bellhouse-effect
- Research Article
- Inkjet printing of viable human dental follicle stem cells
- Research Article
- The use of an icebindingprotein out of the snowflea Hypogastrura harveyi as a cryoprotectant in the cryopreservation of mesenchymal stem cells
- Research Article
- New NIR spectroscopy based method to determine ischemia in vivo in liver – a first study on rats
- Research Article
- QRS and QT ventricular conduction times and permanent pacemaker therapy after transcatheter aortic valve implantation
- Research Article
- Adopting oculopressure tonometry as a transient in vivo rabbit glaucoma model
- Research Article
- Next-generation vision testing: the quick CSF
- Research Article
- Improving tactile sensation in laparoscopic surgery by overcoming size restrictions
- Research Article
- Design and control of a 3-DOF hydraulic driven surgical instrument
- Research Article
- Evaluation of endourological tools to improve the diagnosis and therapy of ureteral tumors – from model development to clinical application
- Research Article
- Frequency based assessment of surgical activities
- Research Article
- “Hands free for intervention”, a new approach for transoral endoscopic surgery
- Research Article
- Pseudo-haptic feedback in medical teleoperation
- Research Article
- Feasibility of interactive gesture control of a robotic microscope
- Research Article
- Towards structuring contextual information for workflow-driven surgical assistance functionalities
- Research Article
- Towards a framework for standardized semantic workflow modeling and management in the surgical domain
- Research Article
- Closed-loop approach for situation awareness of medical devices and operating room infrastructure
- Research Article
- Kinect based physiotherapy system for home use
- Research Article
- Evaluating the microsoft kinect skeleton joint tracking as a tool for home-based physiotherapy
- Research Article
- Integrating multimodal information for intraoperative assistance in neurosurgery
- Research Article
- Respiratory motion tracking using Microsoft’s Kinect v2 camera
- Research Article
- Using smart glasses for ultrasound diagnostics
- Research Article
- Measurement of needle susceptibility artifacts in magnetic resonance images
- Research Article
- Dimensionality reduction of medical image descriptors for multimodal image registration
- Research Article
- Experimental evaluation of different weighting schemes in magnetic particle imaging reconstruction
- Research Article
- Evaluation of CT capability for the detection of thin bone structures
- Research Article
- Towards contactless optical coherence elastography with acoustic tissue excitation
- Research Article
- Development and implementation of algorithms for automatic and robust measurement of the 2D:4D digit ratio using image data
- Research Article
- Automated high-throughput analysis of B cell spreading on immobilized antibodies with whole slide imaging
- Research Article
- Tissue segmentation from head MRI: a ground truth validation for feature-enhanced tracking
- Research Article
- Video tracking of swimming rodents on a reflective water surface
- Research Article
- MR imaging of model drug distribution in simulated vitreous
- Research Article
- Studying the extracellular contribution to the double wave vector diffusion-weighted signal
- Research Article
- Artifacts in field free line magnetic particle imaging in the presence of inhomogeneous and nonlinear magnetic fields
- Research Article
- Introducing a frequency-tunable magnetic particle spectrometer
- Research Article
- Imaging of aortic valve dynamics in 4D OCT
- Research Article
- Intravascular optical coherence tomography (OCT) as an additional tool for the assessment of stent structures
- Research Article
- Simple concept for a wide-field lensless digital holographic microscope using a laser diode
- Research Article
- Intraoperative identification of somato-sensory brain areas using optical imaging and standard RGB camera equipment – a feasibility study
- Research Article
- Respiratory surface motion measurement by Microsoft Kinect
- Research Article
- Improving image quality in EIT imaging by measurement of thorax excursion
- Research Article
- A clustering based dual model framework for EIT imaging: first experimental results
- Research Article
- Three-dimensional anisotropic regularization for limited angle tomography
- Research Article
- GPU-based real-time generation of large ultrasound volumes from freehand 3D sweeps
- Research Article
- Experimental computer tomograph
- Research Article
- US-tracked steered FUS in a respiratory ex vivo ovine liver phantom
- Research Article
- Contribution of brownian rotation and particle assembly polarisation to the particle response in magnetic particle spectrometry
- Research Article
- Preliminary investigations of magnetic modulated nanoparticles for microwave breast cancer detection
- Research Article
- Construction of a device for magnetic separation of superparamagnetic iron oxide nanoparticles
- Research Article
- An IHE-conform telecooperation platform supporting the treatment of dementia patients
- Research Article
- Automated respiratory therapy system based on the ARDSNet protocol with systemic perfusion control
- Research Article
- Identification of surgical instruments using UHF-RFID technology
- Research Article
- A generic concept for the development of model-guided clinical decision support systems
- Research Article
- Evaluation of local alterations in femoral bone mineral density measured via quantitative CT
- Research Article
- Creating 3D gelatin phantoms for experimental evaluation in biomedicine
- Research Article
- Influence of short-term fixation with mixed formalin or ethanol solution on the mechanical properties of human cortical bone
- Research Article
- Analysis of the release kinetics of surface-bound proteins via laser-induced fluorescence
- Research Article
- Tomographic particle image velocimetry of a water-jet for low volume harvesting of fat tissue for regenerative medicine
- Research Article
- Wireless medical sensors – context, robustness and safety
- Research Article
- Sequences for real-time magnetic particle imaging
- Research Article
- Speckle-based off-axis holographic detection for non-contact photoacoustic tomography
- Research Article
- A machine learning approach for planning valve-sparing aortic root reconstruction
- Research Article
- An in-ear pulse wave velocity measurement system using heart sounds as time reference
- Research Article
- Measuring different oxygenation levels in a blood perfusion model simulating the human head using NIRS
- Research Article
- Multisegmental fusion of the lumbar spine a curse or a blessing?
- Research Article
- Numerical analysis of the biomechanical complications accompanying the total hip replacement with NANOS-Prosthetic: bone remodelling and prosthesis migration
- Research Article
- A muscle model for hybrid muscle activation
- Research Article
- Mathematical, numerical and in-vitro investigation of cooling performance of an intra-carotid catheter for selective brain hypothermia
- Research Article
- An ideally parameterized unscented Kalman filter for the inverse problem of electrocardiography
- Research Article
- Interactive visualization of cardiac anatomy and atrial excitation for medical diagnosis and research
- Research Article
- Virtualizing clinical cases of atrial flutter in a fast marching simulation including conduction velocity and ablation scars
- Research Article
- Mesh structure-independent modeling of patient-specific atrial fiber orientation
- Research Article
- Accelerating mono-domain cardiac electrophysiology simulations using OpenCL
- Research Article
- Understanding the cellular mode of action of vernakalant using a computational model: answers and new questions
- Research Article
- A java based simulator with user interface to simulate ventilated patients
- Research Article
- Evaluation of an algorithm to choose between competing models of respiratory mechanics
- Research Article
- Numerical simulation of low-pulsation gerotor pumps for use in the pharmaceutical industry and in biomedicine
- Research Article
- Numerical and experimental flow analysis in centifluidic systems for rapid allergy screening tests
- Research Article
- Biomechanical parameter determination of scaffold-free cartilage constructs (SFCCs) with the hyperelastic material models Yeoh, Ogden and Demiray
- Research Article
- FPGA controlled artificial vascular system
- Research Article
- Simulation based investigation of source-detector configurations for non-invasive fetal pulse oximetry
- Research Article
- Test setup for characterizing the efficacy of embolic protection devices
- Research Article
- Impact of electrode geometry on force generation during functional electrical stimulation
- Research Article
- 3D-based visual physical activity assessment of children
- Research Article
- Realtime assessment of foot orientation by Accelerometers and Gyroscopes
- Research Article
- Image based reconstruction for cystoscopy
- Research Article
- Image guided surgery innovation with graduate students - a new lecture format
- Research Article
- Multichannel FES parameterization for controlling foot motion in paretic gait
- Research Article
- Smartphone supported upper limb prosthesis
- Research Article
- Use of quantitative tremor evaluation to enhance target selection during deep brain stimulation surgery for essential tremor
- Research Article
- Evaluation of adhesion promoters for Parylene C on gold metallization
- Research Article
- The influence of metallic ions from CoCr28Mo6 on the osteogenic differentiation and cytokine release of human osteoblasts
- Research Article
- Increasing the visibility of thin NITINOL vascular implants
- Research Article
- Possible reasons for early artificial bone failure in biomechanical tests of ankle arthrodesis systems
- Research Article
- Development of a bending test procedure for the characterization of flexible ECoG electrode arrays
- Research Article
- Tubular manipulators: a new concept for intracochlear positioning of an auditory prosthesis
- Research Article
- Investigation of the dynamic diameter deformation of vascular stents during fatigue testing with radial loading
- Research Article
- Electrospun vascular grafts with anti-kinking properties
- Research Article
- Integration of temperature sensors in polyimide-based thin-film electrode arrays
- Research Article
- Use cases and usability challenges for head-mounted displays in healthcare
- Research Article
- Device- and service profiles for integrated or systems based on open standards
- Research Article
- Risk management for medical devices in research projects
- Research Article
- Simulation of varying femoral attachment sites of medial patellofemoral ligament using a musculoskeletal multi-body model
- Research Article
- Does enhancing consciousness for strategic planning processes support the effectiveness of problem-based learning concepts in biomedical education?
- Research Article
- SPIO processing in macrophages for MPI: The breast cancer MPI-SNLB-concept
- Research Article
- Numerical simulations of airflow in the human pharynx of OSAHS patients