Feasibility of interactive gesture control of a robotic microscope
-
Sven-Thomas Antoni
 ,
Christian Sonnenburg
,
Christian Sonnenburg

Abstract
Robotic devices become increasingly available in the clinics. One example are motorized surgical microscopes. While there are different scenarios on how to use the devices for autonomous tasks, simple and reliable interaction with the device is a key for acceptance by surgeons. We study, how gesture tracking can be integrated within the setup of a robotic microscope. In our setup, a Leap Motion Controller is used to track hand motion and adjust the field of view accordingly. We demonstrate with a survey that moving the field of view over a specified course is possible even for untrained subjects. Our results indicate that touch-less interaction with robots carrying small, near field gesture sensors is feasible and can be of use in clinical scenarios, where robotic devices are used in direct proximity of patient and physicians.
1 Introduction
Interaction with robotic assistance devices is particularly interesting in medical applications, where physicians are typically confronted with a number of different tools and instruments they need to control. One example are robotic cameras and microscopes. For example, operating microscopes are frequently used in neurosurgery, where the physician sits close to the patient’s head, looking at the surgical field through a microscope while performing precise surgery, e.g., along nerves. Given the small field of view, the clinical scenario typically involves frequent manual adjustments, i.e., grasping the handles and moving the microscope to the next region of interest. Clearly, removing the instruments from the surgical field, placing them outside and manually positioning the microscope interrupts the surgical workflow.
Different approaches for interaction and control of devices in the operating room (OR) have been proposed. Conventionally, switches and pedals are widely used for control, e.g., of patient couch and imaging systems. Limitations include the available space, complexity of the control, the degrees of freedom representable, and the need to maintain sterile surfaces. The latter is also an issue for touch interfaces. In contrast, voice control does not require changes in the clinical workflow [6, 8]. However, the results have been mixed, particularly with respect to robust and fail safe operation in an actual OR setting. In addition to voice control, switches, touch panels and pointers have been studied to realize interaction with devices [3, 6]. An approach that recently gained interest is gesture control [5, 9, 10]. Advantages include touch free interaction and simple integration.
While not widely used in clinical practice, a number of robotic surgical microscopes have been developed [2, 4, 7]. One possible use of these devices is to perform automated tasks like scanning resection cavities [1]. However, most of the time the microscope remains a tool in the hands of the physician, and improving the workflow has been another objective.
We consider gesture tracking for motion control of a robotic microscope. Using a Leap Motion camera (LMC) we present a setup illustrating how gesture tracking could be integrated. We studied the feasibility and precision to move the microscope using finger gestures. Our results indicate, that tracking and motion control are feasible.
2 System setup
We propose a setup where the sensor is embedded in a surgical microscope. A clear advantage is the unobstructed view on the surgical field. However, the sensor needs to be small, which holds true for the LMC. The device primarily consists of two cameras and three infrared light emitting diodes illuminating the scene. It is intended to track finger motion in a range of 25 to 600 mm above the device. Given that all processing is done on a computer, the device is small and lightweight, measuring just 75 mm by 25 mm by 6.2 mm. Another advantage is the high temporal resolution. The software interface provides information on hand gestures and can be configured to track different points, e.g., the centroid of the hand, or a finger.
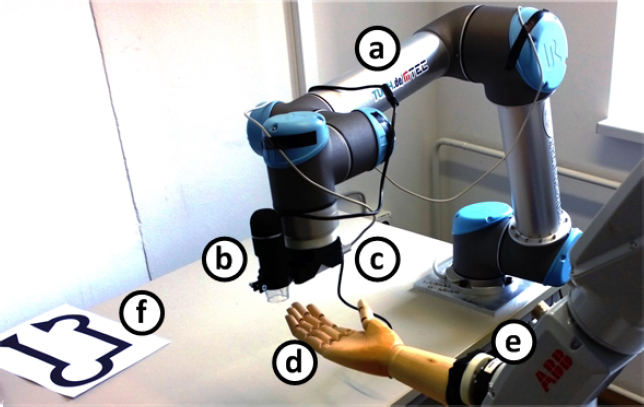
Our experimental setup with a) microscopy robot, b) USB microscope, c) leap motion controller, d) hand phantom, e) hand motion robot, and f) track for manual motion experiments.
To assess the feasibility of tracking and gesture control we have realized a simplified setup consisting of a UR5 (Universal Robots, Denmark) robotic arm, a USB microscope, and the leap motion controller. A second robot (ABB IRB120, Sweden) is used for some experiments evaluating the tracking performance by moving a hand phantom with adjustable fingers. A computer with an Xeon E3-1225v3 CPU and 16 GB RAM running Windows 8.1 Professional is used to process the LMC data and to control the UR5. Figure 1 shows the setup.
The LMC defines a coordinate frame with the x axis along the long centerline, the z axis along the short centerline, and the y axis normal to form a right hand system (see Fig. 2). For the purpose of our experiments, the height of the microscope with respect to the base plane was not changed. The LMC and the microscope were aligned and placed into an adapter and mounted to the tool flange such that the orientation of the coordinate axes was aligned. We did not need to obtain the actual transformation, i.e., particularly the translation, as all motions are relative to the last position of the microscope.
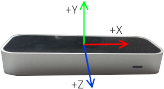
The LMC coordinate system.
3 Experimental evaluation
In our analysis we were primarily interested in the possibility to track motion for interaction with a robotic microscope. We studied two different scenarios. First, the actual microscopy setup was used, but the motion was mimicked with the hand phantom mounted to a second robot (compare Fig. 1). Second, a pattern denoting a corridor for a target trajectory was printed, and 14 test persons were asked to move the center of the microscope image along the pattern. The center was highlighted by a cross-hair and the motion was solely controled by moving the hand.
In the first experiment, the trajectories of the robot representing the microscope and of the robot moving the hand are compared. This is evaluated by calculating the root mean squared error (RMSE)
of the difference in the xy-plane between both TCP positions
In the second experiment the quotient
between the total moved distance Δtotal and the distance Δoutside moved outside the course is calculated for evaluation. In addition the time of the subjects to finish the course is measured.
During the experiments the room temperature was constant at approximately 22 degrees Celsius and the LMC and the UR5 robot worked under normal operating conditions.
4 Results
4.1 Motion tracking
We measured the motion tracking performance for squares of edge length 50mm and 100mm at speeds ranging from 5mm/s to 20mm/s. An example of a resulting trajectory is shown in Fig. 3. The RMSE between the TCP positions is displayed in Table 1. The LMC was mounted with its longer centerline and hence its x-axis is parallel to the y-axis in the image. In the data this is represented by higher errors in y-direction of the example trajectory. Besides, the results are pretty straightforward with RMSE increasing for higher speeds and squares.
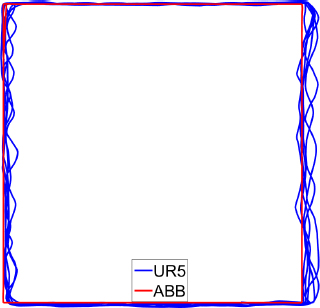
Example of the trajectories resulting from motion tracking. The square has an edge length of 50mm and the ABB moves at 5mm/s.
RMSE of the motion tracking.
| speed (mm/s) | edge length (mm) | RMSE (mm) |
|---|---|---|
| 5 | 50 | 6.8183 |
| 10 | 50 | 6.9378 |
| 10 | 100 | 11.6893 |
| 20 | 50 | 8.9277 |
| 20 | 100 | 13.9469 |
4.2 Microscope survey
The survey was completed by 14 untrained participants with one to three tries with the majority completing two tries. The results are displayed in Tab. 2. An example of a resulting trajectory is shown in Fig. 4. Clearly most of the subjects delivered very good results for not being familiar with the system before. Only two participants could not achieve comparable results. The data shows a pretty steep learning curve with most of the participants improving their results in a second run either in accuracy of their movement or in speed. In at least one try 9 of 13 achieved results of pquote < 0.1. As with motion tracking we achieved a sampling frequency greater than 100Hz.
5 Discussion
Our results indicate that the general tracking performance of the LMC using the standard software interface has to be carefully considered when using the device in clinical scenarios. The RMSE for robot hand motion was between 6.8mm and 13.9mm but some delay in the control is defi-nitely measured here, too. Following the course, most test persons performed well with 9 of 14 having a pquote below 0.1 in at least one try. The results for both, the robotic hand motion and the human trajectory following indicate that the errors are small enough to realize interactive motion control.
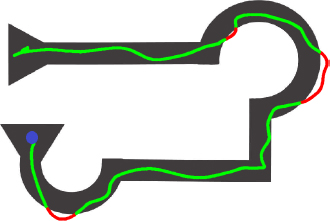
Course of the survey and an example of a trajectory with pquote = 0.085 and a runtime of 21.2s. While on the course the trajectory is green, when outside it is red. The start is denoted by a blue dot.
Results of the different participants in the survey.
| participant | try | pquote | time (s) |
|---|---|---|---|
| subject 1 | 1 | 0.0207 | 61.2 |
| 2 | 0 | 45.5 | |
| 3 | 0.0300 | 21.0 | |
| subject 2 | 1 | 0.3891 | 37.9 |
| 2 | 0.1274 | 19.2 | |
| 3 | 0.0415 | 20.5 | |
| subject 3 | 1 | 0 | 31.6 |
| 2 | 0 | 34.8 | |
| subject 4 | 1 | 0.0396 | 33.9 |
| 2 | 0.0526 | 45.2 | |
| 3 | 0.0523 | 21.5 | |
| subject 5 | 1 | 0.1712 | 35.6 |
| 2 | 0.2368 | 40.0 | |
| subject 6 | 1 | 0.1666 | 39.4 |
| subject 7 | 1 | 0.0094 | 74.8 |
| 2 | 0.0231 | 56.9 | |
| subject 8 | 1 | 0.0691 | 42.3 |
| 2 | 0.0862 | 38.3 | |
| subject 9 | 1 | 0.2206 | 25.9 |
| 2 | 0.1647 | 20.9 | |
| subject 10 | 1 | 0.7358 | 34.4 |
| 2 | 0.5645 | 61.0 | |
| subject 11 | 1 | 0.2379 | 43.2 |
| 2 | 0.2406 | 30.0 | |
| subject 12 | 1 | 0.2273 | 87.8 |
| 2 | 0.0961 | 56.1 | |
| subject 13 | 1 | 0.1578 | 25.9 |
| 2 | 0.0313 | 26.3 | |
| subject 14 | 1 | 0.0850 | 21.2 |
| 2 | 0.0091 | 21.0 | |
| 3 | 0.2031 | 12.3 |
Currently, few motorized microscopes are available, with their practical advantages being questionable. We have shown that interactive gesture control of a robotic microscope is feasible. Embedding the sensor in the device would avoid extra setup effort and line of sight problems while adding no extra complexity to the workflow.
Author’s Statement
Conflict of interest: Authors state no conflict of interest. Material and Methods: Informed consent: Informed consent has been obtained from all individuals included in this study. Ethical approval: The conducted research is not related to either human or animals use.
References
[1] Finke, M., Kantelhardt, S., Schlaefer, A., Bruder, R., Lankenau, E., Giese, A., Schweikard, A.: Automatic scanning of large tissue areas in neurosurgery using optical coherence tomography. In: Int J Med Robot 8 (2012), Sep, Nr. 3, S. 327–33610.1002/rcs.1425Search in Google Scholar PubMed
[2] Finke, M., Schweikard, A.: Motorization of a surgical microscope for intra-operative navigation and intuitive control. In: Int J Med Robot 6 (2010), Sep, Nr. 3, S. 269–28010.1002/rcs.314Search in Google Scholar PubMed
[3] Finke, Markus, Stender, Birgit, Bruder, Ralf, Schlaefer, Alexander, Schweikard, Achim: An experimental comparison of control devices for automatic movements of a surgical microscope. In: Proceedings of the 24th International Conference and Exhibition on Computer Assisted Radiology and Surgery (CARS’10), 2010, S. 311–312Search in Google Scholar
[4] Giorgi, C., Eisenberg, H., Costi, G., Gallo, E., Garibotto, G., Casolino, D. S.: Robot-assisted microscope for neurosurgery. In: J Image Guid Surg 1 (1995), Nr. 3, S. 158–16310.1002/(SICI)1522-712X(1995)1:3<158::AID-IGS5>3.0.CO;2-9Search in Google Scholar
[5] Hartmann, Florian, Schlaefer, Alexander: Feasibility of touchless control of operating room lights. In: Int J Comput Assist Radiol Surg 8 (2013), Mar, Nr. 2, S. 259–26810.1007/s11548-012-0778-2Search in Google Scholar
[6] Kassell, N. F., Downs, JH 3rd, Graves, B. S.: Telepresence in neurosurgery: the integrated remote neurosurgical system. In: Stud Health Technol Inform 39 (1997), S. 411–419Search in Google Scholar
[7] Oppenlander, Mark E., Chowdhry, Shakeel A., Merkl, Brandon, Hattendorf, Guido M., Nakaji, Peter, Spetzler, Robert F.: Robotic autopositioning of the operating microscope. In: Neurosurgery 10 Suppl 2 (2014), Jun, S. 214–9; discussion 21910.1227/NEU.0000000000000276Search in Google Scholar PubMed
[8] Punt, Marius M., Stefels, Coen N., Grimbergen, Cornelis A., Dankelman, Jenny: Evaluation of voice control, touch panel control and assistant control during steering of an endoscope. In: Minim Invasive Ther Allied Technol 14 (2005), Nr. 3, S. 181– 18710.1080/13645700510033967Search in Google Scholar PubMed
[9] Rossol, Nathaniel, Cheng, Irene, Rui Shen, Basu, Anup: Touchfree medical interfaces. In: Conf Proc IEEE Eng Med Biol Soc 2014 (2014), S. 6597–660010.1109/EMBC.2014.6945140Search in Google Scholar PubMed
[10] Yoshimitsu, Kitaro, Muragaki, Yoshihiro, Maruyama, Takashi, Yamato, Masayuki, Iseki, Hiroshi: Development and initial clinical testing of ”OPECT”: an innovative device for fully intangible control of the intraoperative image-displaying monitor by the surgeon. In: Neurosurgery 10 Suppl 1 (2014), Mar, S. 46–50; discussion 5010.1227/NEU.0000000000000214Search in Google Scholar PubMed
© 2015 by Walter de Gruyter GmbH, Berlin/Boston
This article is distributed under the terms of the Creative Commons Attribution Non-Commercial License, which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Articles in the same Issue
- Research Article
- Development and characterization of superparamagnetic coatings
- Research Article
- The development of an experimental setup to measure acousto-electric interaction signal
- Research Article
- Stability analysis of ferrofluids
- Research Article
- Investigation of endothelial growth using a sensors-integrated microfluidic system to simulate physiological barriers
- Research Article
- Energy harvesting for active implants: powering a ruminal pH-monitoring system
- Research Article
- New type of fluxgate magnetometer for the heart’s magnetic fields detection
- Research Article
- Field mapping of ballistic pressure pulse sources
- Research Article
- Development of a new homecare sleep monitor using body sounds and motion tracking
- Research Article
- Noise properties of textile, capacitive EEG electrodes
- Research Article
- Detecting phase singularities and rotor center trajectories based on the Hilbert transform of intraatrial electrograms in an atrial voxel model
- Research Article
- Spike sorting: the overlapping spikes challenge
- Research Article
- Separating the effect of respiration from the heart rate variability for cases of constant harmonic breathing
- Research Article
- Locating regions of arrhythmogenic substrate by analyzing the duration of triggered atrial activities
- Research Article
- Combining different ECG derived respiration tracking methods to create an optimal reconstruction of the breathing pattern
- Research Article
- Atrial and ventricular signal averaging electrocardiography in pacemaker and cardiac resynchronization therapy
- Research Article
- Estimation of a respiratory signal from a single-lead ECG using the 4th order central moments
- Research Article
- Compressed sensing of multi-lead ECG signals by compressive multiplexing
- Research Article
- Heart rate monitoring in ultra-high-field MRI using frequency information obtained from video signals of the human skin compared to electrocardiography and pulse oximetry
- Research Article
- Synchronization in wireless biomedical-sensor networks with Bluetooth Low Energy
- Research Article
- Automated classification of stages of anaesthesia by populations of evolutionary optimized fuzzy rules
- Research Article
- Effects of sampling rate on automated fatigue recognition in surface EMG signals
- Research Article
- Closed-loop transcranial alternating current stimulation of slow oscillations
- Research Article
- Cardiac index in atrio- and interventricular delay optimized cardiac resynchronization therapy and cardiac contractility modulation
- Research Article
- The role of expert evaluation for microsleep detection
- Research Article
- The impact of baseline wander removal techniques on the ST segment in simulated ischemic 12-lead ECGs
- Research Article
- Metal artifact reduction by projection replacements and non-local prior image integration
- Research Article
- A novel coaxial nozzle for in-process adjustment of electrospun scaffolds’ fiber diameter
- Research Article
- Processing of membranes for oxygenation using the Bellhouse-effect
- Research Article
- Inkjet printing of viable human dental follicle stem cells
- Research Article
- The use of an icebindingprotein out of the snowflea Hypogastrura harveyi as a cryoprotectant in the cryopreservation of mesenchymal stem cells
- Research Article
- New NIR spectroscopy based method to determine ischemia in vivo in liver – a first study on rats
- Research Article
- QRS and QT ventricular conduction times and permanent pacemaker therapy after transcatheter aortic valve implantation
- Research Article
- Adopting oculopressure tonometry as a transient in vivo rabbit glaucoma model
- Research Article
- Next-generation vision testing: the quick CSF
- Research Article
- Improving tactile sensation in laparoscopic surgery by overcoming size restrictions
- Research Article
- Design and control of a 3-DOF hydraulic driven surgical instrument
- Research Article
- Evaluation of endourological tools to improve the diagnosis and therapy of ureteral tumors – from model development to clinical application
- Research Article
- Frequency based assessment of surgical activities
- Research Article
- “Hands free for intervention”, a new approach for transoral endoscopic surgery
- Research Article
- Pseudo-haptic feedback in medical teleoperation
- Research Article
- Feasibility of interactive gesture control of a robotic microscope
- Research Article
- Towards structuring contextual information for workflow-driven surgical assistance functionalities
- Research Article
- Towards a framework for standardized semantic workflow modeling and management in the surgical domain
- Research Article
- Closed-loop approach for situation awareness of medical devices and operating room infrastructure
- Research Article
- Kinect based physiotherapy system for home use
- Research Article
- Evaluating the microsoft kinect skeleton joint tracking as a tool for home-based physiotherapy
- Research Article
- Integrating multimodal information for intraoperative assistance in neurosurgery
- Research Article
- Respiratory motion tracking using Microsoft’s Kinect v2 camera
- Research Article
- Using smart glasses for ultrasound diagnostics
- Research Article
- Measurement of needle susceptibility artifacts in magnetic resonance images
- Research Article
- Dimensionality reduction of medical image descriptors for multimodal image registration
- Research Article
- Experimental evaluation of different weighting schemes in magnetic particle imaging reconstruction
- Research Article
- Evaluation of CT capability for the detection of thin bone structures
- Research Article
- Towards contactless optical coherence elastography with acoustic tissue excitation
- Research Article
- Development and implementation of algorithms for automatic and robust measurement of the 2D:4D digit ratio using image data
- Research Article
- Automated high-throughput analysis of B cell spreading on immobilized antibodies with whole slide imaging
- Research Article
- Tissue segmentation from head MRI: a ground truth validation for feature-enhanced tracking
- Research Article
- Video tracking of swimming rodents on a reflective water surface
- Research Article
- MR imaging of model drug distribution in simulated vitreous
- Research Article
- Studying the extracellular contribution to the double wave vector diffusion-weighted signal
- Research Article
- Artifacts in field free line magnetic particle imaging in the presence of inhomogeneous and nonlinear magnetic fields
- Research Article
- Introducing a frequency-tunable magnetic particle spectrometer
- Research Article
- Imaging of aortic valve dynamics in 4D OCT
- Research Article
- Intravascular optical coherence tomography (OCT) as an additional tool for the assessment of stent structures
- Research Article
- Simple concept for a wide-field lensless digital holographic microscope using a laser diode
- Research Article
- Intraoperative identification of somato-sensory brain areas using optical imaging and standard RGB camera equipment – a feasibility study
- Research Article
- Respiratory surface motion measurement by Microsoft Kinect
- Research Article
- Improving image quality in EIT imaging by measurement of thorax excursion
- Research Article
- A clustering based dual model framework for EIT imaging: first experimental results
- Research Article
- Three-dimensional anisotropic regularization for limited angle tomography
- Research Article
- GPU-based real-time generation of large ultrasound volumes from freehand 3D sweeps
- Research Article
- Experimental computer tomograph
- Research Article
- US-tracked steered FUS in a respiratory ex vivo ovine liver phantom
- Research Article
- Contribution of brownian rotation and particle assembly polarisation to the particle response in magnetic particle spectrometry
- Research Article
- Preliminary investigations of magnetic modulated nanoparticles for microwave breast cancer detection
- Research Article
- Construction of a device for magnetic separation of superparamagnetic iron oxide nanoparticles
- Research Article
- An IHE-conform telecooperation platform supporting the treatment of dementia patients
- Research Article
- Automated respiratory therapy system based on the ARDSNet protocol with systemic perfusion control
- Research Article
- Identification of surgical instruments using UHF-RFID technology
- Research Article
- A generic concept for the development of model-guided clinical decision support systems
- Research Article
- Evaluation of local alterations in femoral bone mineral density measured via quantitative CT
- Research Article
- Creating 3D gelatin phantoms for experimental evaluation in biomedicine
- Research Article
- Influence of short-term fixation with mixed formalin or ethanol solution on the mechanical properties of human cortical bone
- Research Article
- Analysis of the release kinetics of surface-bound proteins via laser-induced fluorescence
- Research Article
- Tomographic particle image velocimetry of a water-jet for low volume harvesting of fat tissue for regenerative medicine
- Research Article
- Wireless medical sensors – context, robustness and safety
- Research Article
- Sequences for real-time magnetic particle imaging
- Research Article
- Speckle-based off-axis holographic detection for non-contact photoacoustic tomography
- Research Article
- A machine learning approach for planning valve-sparing aortic root reconstruction
- Research Article
- An in-ear pulse wave velocity measurement system using heart sounds as time reference
- Research Article
- Measuring different oxygenation levels in a blood perfusion model simulating the human head using NIRS
- Research Article
- Multisegmental fusion of the lumbar spine a curse or a blessing?
- Research Article
- Numerical analysis of the biomechanical complications accompanying the total hip replacement with NANOS-Prosthetic: bone remodelling and prosthesis migration
- Research Article
- A muscle model for hybrid muscle activation
- Research Article
- Mathematical, numerical and in-vitro investigation of cooling performance of an intra-carotid catheter for selective brain hypothermia
- Research Article
- An ideally parameterized unscented Kalman filter for the inverse problem of electrocardiography
- Research Article
- Interactive visualization of cardiac anatomy and atrial excitation for medical diagnosis and research
- Research Article
- Virtualizing clinical cases of atrial flutter in a fast marching simulation including conduction velocity and ablation scars
- Research Article
- Mesh structure-independent modeling of patient-specific atrial fiber orientation
- Research Article
- Accelerating mono-domain cardiac electrophysiology simulations using OpenCL
- Research Article
- Understanding the cellular mode of action of vernakalant using a computational model: answers and new questions
- Research Article
- A java based simulator with user interface to simulate ventilated patients
- Research Article
- Evaluation of an algorithm to choose between competing models of respiratory mechanics
- Research Article
- Numerical simulation of low-pulsation gerotor pumps for use in the pharmaceutical industry and in biomedicine
- Research Article
- Numerical and experimental flow analysis in centifluidic systems for rapid allergy screening tests
- Research Article
- Biomechanical parameter determination of scaffold-free cartilage constructs (SFCCs) with the hyperelastic material models Yeoh, Ogden and Demiray
- Research Article
- FPGA controlled artificial vascular system
- Research Article
- Simulation based investigation of source-detector configurations for non-invasive fetal pulse oximetry
- Research Article
- Test setup for characterizing the efficacy of embolic protection devices
- Research Article
- Impact of electrode geometry on force generation during functional electrical stimulation
- Research Article
- 3D-based visual physical activity assessment of children
- Research Article
- Realtime assessment of foot orientation by Accelerometers and Gyroscopes
- Research Article
- Image based reconstruction for cystoscopy
- Research Article
- Image guided surgery innovation with graduate students - a new lecture format
- Research Article
- Multichannel FES parameterization for controlling foot motion in paretic gait
- Research Article
- Smartphone supported upper limb prosthesis
- Research Article
- Use of quantitative tremor evaluation to enhance target selection during deep brain stimulation surgery for essential tremor
- Research Article
- Evaluation of adhesion promoters for Parylene C on gold metallization
- Research Article
- The influence of metallic ions from CoCr28Mo6 on the osteogenic differentiation and cytokine release of human osteoblasts
- Research Article
- Increasing the visibility of thin NITINOL vascular implants
- Research Article
- Possible reasons for early artificial bone failure in biomechanical tests of ankle arthrodesis systems
- Research Article
- Development of a bending test procedure for the characterization of flexible ECoG electrode arrays
- Research Article
- Tubular manipulators: a new concept for intracochlear positioning of an auditory prosthesis
- Research Article
- Investigation of the dynamic diameter deformation of vascular stents during fatigue testing with radial loading
- Research Article
- Electrospun vascular grafts with anti-kinking properties
- Research Article
- Integration of temperature sensors in polyimide-based thin-film electrode arrays
- Research Article
- Use cases and usability challenges for head-mounted displays in healthcare
- Research Article
- Device- and service profiles for integrated or systems based on open standards
- Research Article
- Risk management for medical devices in research projects
- Research Article
- Simulation of varying femoral attachment sites of medial patellofemoral ligament using a musculoskeletal multi-body model
- Research Article
- Does enhancing consciousness for strategic planning processes support the effectiveness of problem-based learning concepts in biomedical education?
- Research Article
- SPIO processing in macrophages for MPI: The breast cancer MPI-SNLB-concept
- Research Article
- Numerical simulations of airflow in the human pharynx of OSAHS patients
Articles in the same Issue
- Research Article
- Development and characterization of superparamagnetic coatings
- Research Article
- The development of an experimental setup to measure acousto-electric interaction signal
- Research Article
- Stability analysis of ferrofluids
- Research Article
- Investigation of endothelial growth using a sensors-integrated microfluidic system to simulate physiological barriers
- Research Article
- Energy harvesting for active implants: powering a ruminal pH-monitoring system
- Research Article
- New type of fluxgate magnetometer for the heart’s magnetic fields detection
- Research Article
- Field mapping of ballistic pressure pulse sources
- Research Article
- Development of a new homecare sleep monitor using body sounds and motion tracking
- Research Article
- Noise properties of textile, capacitive EEG electrodes
- Research Article
- Detecting phase singularities and rotor center trajectories based on the Hilbert transform of intraatrial electrograms in an atrial voxel model
- Research Article
- Spike sorting: the overlapping spikes challenge
- Research Article
- Separating the effect of respiration from the heart rate variability for cases of constant harmonic breathing
- Research Article
- Locating regions of arrhythmogenic substrate by analyzing the duration of triggered atrial activities
- Research Article
- Combining different ECG derived respiration tracking methods to create an optimal reconstruction of the breathing pattern
- Research Article
- Atrial and ventricular signal averaging electrocardiography in pacemaker and cardiac resynchronization therapy
- Research Article
- Estimation of a respiratory signal from a single-lead ECG using the 4th order central moments
- Research Article
- Compressed sensing of multi-lead ECG signals by compressive multiplexing
- Research Article
- Heart rate monitoring in ultra-high-field MRI using frequency information obtained from video signals of the human skin compared to electrocardiography and pulse oximetry
- Research Article
- Synchronization in wireless biomedical-sensor networks with Bluetooth Low Energy
- Research Article
- Automated classification of stages of anaesthesia by populations of evolutionary optimized fuzzy rules
- Research Article
- Effects of sampling rate on automated fatigue recognition in surface EMG signals
- Research Article
- Closed-loop transcranial alternating current stimulation of slow oscillations
- Research Article
- Cardiac index in atrio- and interventricular delay optimized cardiac resynchronization therapy and cardiac contractility modulation
- Research Article
- The role of expert evaluation for microsleep detection
- Research Article
- The impact of baseline wander removal techniques on the ST segment in simulated ischemic 12-lead ECGs
- Research Article
- Metal artifact reduction by projection replacements and non-local prior image integration
- Research Article
- A novel coaxial nozzle for in-process adjustment of electrospun scaffolds’ fiber diameter
- Research Article
- Processing of membranes for oxygenation using the Bellhouse-effect
- Research Article
- Inkjet printing of viable human dental follicle stem cells
- Research Article
- The use of an icebindingprotein out of the snowflea Hypogastrura harveyi as a cryoprotectant in the cryopreservation of mesenchymal stem cells
- Research Article
- New NIR spectroscopy based method to determine ischemia in vivo in liver – a first study on rats
- Research Article
- QRS and QT ventricular conduction times and permanent pacemaker therapy after transcatheter aortic valve implantation
- Research Article
- Adopting oculopressure tonometry as a transient in vivo rabbit glaucoma model
- Research Article
- Next-generation vision testing: the quick CSF
- Research Article
- Improving tactile sensation in laparoscopic surgery by overcoming size restrictions
- Research Article
- Design and control of a 3-DOF hydraulic driven surgical instrument
- Research Article
- Evaluation of endourological tools to improve the diagnosis and therapy of ureteral tumors – from model development to clinical application
- Research Article
- Frequency based assessment of surgical activities
- Research Article
- “Hands free for intervention”, a new approach for transoral endoscopic surgery
- Research Article
- Pseudo-haptic feedback in medical teleoperation
- Research Article
- Feasibility of interactive gesture control of a robotic microscope
- Research Article
- Towards structuring contextual information for workflow-driven surgical assistance functionalities
- Research Article
- Towards a framework for standardized semantic workflow modeling and management in the surgical domain
- Research Article
- Closed-loop approach for situation awareness of medical devices and operating room infrastructure
- Research Article
- Kinect based physiotherapy system for home use
- Research Article
- Evaluating the microsoft kinect skeleton joint tracking as a tool for home-based physiotherapy
- Research Article
- Integrating multimodal information for intraoperative assistance in neurosurgery
- Research Article
- Respiratory motion tracking using Microsoft’s Kinect v2 camera
- Research Article
- Using smart glasses for ultrasound diagnostics
- Research Article
- Measurement of needle susceptibility artifacts in magnetic resonance images
- Research Article
- Dimensionality reduction of medical image descriptors for multimodal image registration
- Research Article
- Experimental evaluation of different weighting schemes in magnetic particle imaging reconstruction
- Research Article
- Evaluation of CT capability for the detection of thin bone structures
- Research Article
- Towards contactless optical coherence elastography with acoustic tissue excitation
- Research Article
- Development and implementation of algorithms for automatic and robust measurement of the 2D:4D digit ratio using image data
- Research Article
- Automated high-throughput analysis of B cell spreading on immobilized antibodies with whole slide imaging
- Research Article
- Tissue segmentation from head MRI: a ground truth validation for feature-enhanced tracking
- Research Article
- Video tracking of swimming rodents on a reflective water surface
- Research Article
- MR imaging of model drug distribution in simulated vitreous
- Research Article
- Studying the extracellular contribution to the double wave vector diffusion-weighted signal
- Research Article
- Artifacts in field free line magnetic particle imaging in the presence of inhomogeneous and nonlinear magnetic fields
- Research Article
- Introducing a frequency-tunable magnetic particle spectrometer
- Research Article
- Imaging of aortic valve dynamics in 4D OCT
- Research Article
- Intravascular optical coherence tomography (OCT) as an additional tool for the assessment of stent structures
- Research Article
- Simple concept for a wide-field lensless digital holographic microscope using a laser diode
- Research Article
- Intraoperative identification of somato-sensory brain areas using optical imaging and standard RGB camera equipment – a feasibility study
- Research Article
- Respiratory surface motion measurement by Microsoft Kinect
- Research Article
- Improving image quality in EIT imaging by measurement of thorax excursion
- Research Article
- A clustering based dual model framework for EIT imaging: first experimental results
- Research Article
- Three-dimensional anisotropic regularization for limited angle tomography
- Research Article
- GPU-based real-time generation of large ultrasound volumes from freehand 3D sweeps
- Research Article
- Experimental computer tomograph
- Research Article
- US-tracked steered FUS in a respiratory ex vivo ovine liver phantom
- Research Article
- Contribution of brownian rotation and particle assembly polarisation to the particle response in magnetic particle spectrometry
- Research Article
- Preliminary investigations of magnetic modulated nanoparticles for microwave breast cancer detection
- Research Article
- Construction of a device for magnetic separation of superparamagnetic iron oxide nanoparticles
- Research Article
- An IHE-conform telecooperation platform supporting the treatment of dementia patients
- Research Article
- Automated respiratory therapy system based on the ARDSNet protocol with systemic perfusion control
- Research Article
- Identification of surgical instruments using UHF-RFID technology
- Research Article
- A generic concept for the development of model-guided clinical decision support systems
- Research Article
- Evaluation of local alterations in femoral bone mineral density measured via quantitative CT
- Research Article
- Creating 3D gelatin phantoms for experimental evaluation in biomedicine
- Research Article
- Influence of short-term fixation with mixed formalin or ethanol solution on the mechanical properties of human cortical bone
- Research Article
- Analysis of the release kinetics of surface-bound proteins via laser-induced fluorescence
- Research Article
- Tomographic particle image velocimetry of a water-jet for low volume harvesting of fat tissue for regenerative medicine
- Research Article
- Wireless medical sensors – context, robustness and safety
- Research Article
- Sequences for real-time magnetic particle imaging
- Research Article
- Speckle-based off-axis holographic detection for non-contact photoacoustic tomography
- Research Article
- A machine learning approach for planning valve-sparing aortic root reconstruction
- Research Article
- An in-ear pulse wave velocity measurement system using heart sounds as time reference
- Research Article
- Measuring different oxygenation levels in a blood perfusion model simulating the human head using NIRS
- Research Article
- Multisegmental fusion of the lumbar spine a curse or a blessing?
- Research Article
- Numerical analysis of the biomechanical complications accompanying the total hip replacement with NANOS-Prosthetic: bone remodelling and prosthesis migration
- Research Article
- A muscle model for hybrid muscle activation
- Research Article
- Mathematical, numerical and in-vitro investigation of cooling performance of an intra-carotid catheter for selective brain hypothermia
- Research Article
- An ideally parameterized unscented Kalman filter for the inverse problem of electrocardiography
- Research Article
- Interactive visualization of cardiac anatomy and atrial excitation for medical diagnosis and research
- Research Article
- Virtualizing clinical cases of atrial flutter in a fast marching simulation including conduction velocity and ablation scars
- Research Article
- Mesh structure-independent modeling of patient-specific atrial fiber orientation
- Research Article
- Accelerating mono-domain cardiac electrophysiology simulations using OpenCL
- Research Article
- Understanding the cellular mode of action of vernakalant using a computational model: answers and new questions
- Research Article
- A java based simulator with user interface to simulate ventilated patients
- Research Article
- Evaluation of an algorithm to choose between competing models of respiratory mechanics
- Research Article
- Numerical simulation of low-pulsation gerotor pumps for use in the pharmaceutical industry and in biomedicine
- Research Article
- Numerical and experimental flow analysis in centifluidic systems for rapid allergy screening tests
- Research Article
- Biomechanical parameter determination of scaffold-free cartilage constructs (SFCCs) with the hyperelastic material models Yeoh, Ogden and Demiray
- Research Article
- FPGA controlled artificial vascular system
- Research Article
- Simulation based investigation of source-detector configurations for non-invasive fetal pulse oximetry
- Research Article
- Test setup for characterizing the efficacy of embolic protection devices
- Research Article
- Impact of electrode geometry on force generation during functional electrical stimulation
- Research Article
- 3D-based visual physical activity assessment of children
- Research Article
- Realtime assessment of foot orientation by Accelerometers and Gyroscopes
- Research Article
- Image based reconstruction for cystoscopy
- Research Article
- Image guided surgery innovation with graduate students - a new lecture format
- Research Article
- Multichannel FES parameterization for controlling foot motion in paretic gait
- Research Article
- Smartphone supported upper limb prosthesis
- Research Article
- Use of quantitative tremor evaluation to enhance target selection during deep brain stimulation surgery for essential tremor
- Research Article
- Evaluation of adhesion promoters for Parylene C on gold metallization
- Research Article
- The influence of metallic ions from CoCr28Mo6 on the osteogenic differentiation and cytokine release of human osteoblasts
- Research Article
- Increasing the visibility of thin NITINOL vascular implants
- Research Article
- Possible reasons for early artificial bone failure in biomechanical tests of ankle arthrodesis systems
- Research Article
- Development of a bending test procedure for the characterization of flexible ECoG electrode arrays
- Research Article
- Tubular manipulators: a new concept for intracochlear positioning of an auditory prosthesis
- Research Article
- Investigation of the dynamic diameter deformation of vascular stents during fatigue testing with radial loading
- Research Article
- Electrospun vascular grafts with anti-kinking properties
- Research Article
- Integration of temperature sensors in polyimide-based thin-film electrode arrays
- Research Article
- Use cases and usability challenges for head-mounted displays in healthcare
- Research Article
- Device- and service profiles for integrated or systems based on open standards
- Research Article
- Risk management for medical devices in research projects
- Research Article
- Simulation of varying femoral attachment sites of medial patellofemoral ligament using a musculoskeletal multi-body model
- Research Article
- Does enhancing consciousness for strategic planning processes support the effectiveness of problem-based learning concepts in biomedical education?
- Research Article
- SPIO processing in macrophages for MPI: The breast cancer MPI-SNLB-concept
- Research Article
- Numerical simulations of airflow in the human pharynx of OSAHS patients