Application of nonlinear adaptive technology in GPS positioning trajectory of ship navigation
-
Haihui Dong
 ,
Hui Yin
,
Hui Yin

Abstract
This article addresses the challenges in the periodic law of high-frequency motion and effectively identifies the influence of high-frequency motion on ship dynamic positioning. The main aim of the article is to design a dynamic positioning filter by applying nonlinear adaptive technology to eliminate the disturbance to the ship’s dynamic propulsion system. This article proposes a method to control the ship’s dynamic positioning and apply nonlinear adaptive technology in the dynamic positioning control in order to obtain the ship’s state and reference coordinate system. Further, a mathematical model and a dynamic environmental model in ship dynamic positioning control are analyzed in this work. The control index model is located by the experimental data, and the control performance is improved within the allowable range. The experimental analysis revealed that if the initial position of the ship is (0, 0, 0), then the desired position is (100, 100, 0). The operating ranges of –0.6 × 107 to 0.6 × 107, –0.4 × 107 to 0.4 × 107, and –5.6 × 108 to 5.6 × 108 are used. The ranges of motion of –150 to 150, –130 to 130, and –5 to 5 are observed, respectively, along with a wind disturbance force of 8 m/s. The wave disturbance force of 1 m/s is observed along with 90° wind. It was observed from the experimentation that the ship could basically achieve a stable operation and control the environmental disturbance within the error range. The outcomes reveal that the proposed dynamic positioning model based on nonlinear adaptive technology has strong stability and accuracy.
1 Introduction
A ship trajectory tracking control system is a complex multi-input–multi-output uncertain nonlinear system. It is one of the important topics in nonlinear control system research to design a controller to realize ship trajectory tracking. This has attracted considerable attention from scholars at home and abroad [1]. In fact, nonlinear behavior is inherent in the ship. Using non-model-based intelligent control technology, a fuzzy-proportional integral and derivative (PID) track control automatic tracking controller is proposed, and a neural network track tracking controller is designed. With the development of control theory and the improvement of ship track tracking performance requirements, the nonlinear control technology developed on the basis of a higher-precision nonlinear ship motion mathematical model has achieved remarkable results. A dynamic positioning system is not limited by water depth, high positioning accuracy, strong mobility, etc. It is widely used in supply ships, pipe-laying ships, rescue ships, and oil drilling platforms [2,3,4]. There are obvious uncertainties in ship dynamics and environmental disturbances due to frequent changes in ship operating conditions and marine environment [5]. The major marine elements are involved in the workflow of dynamic positioning control are depicted in Figure 1.
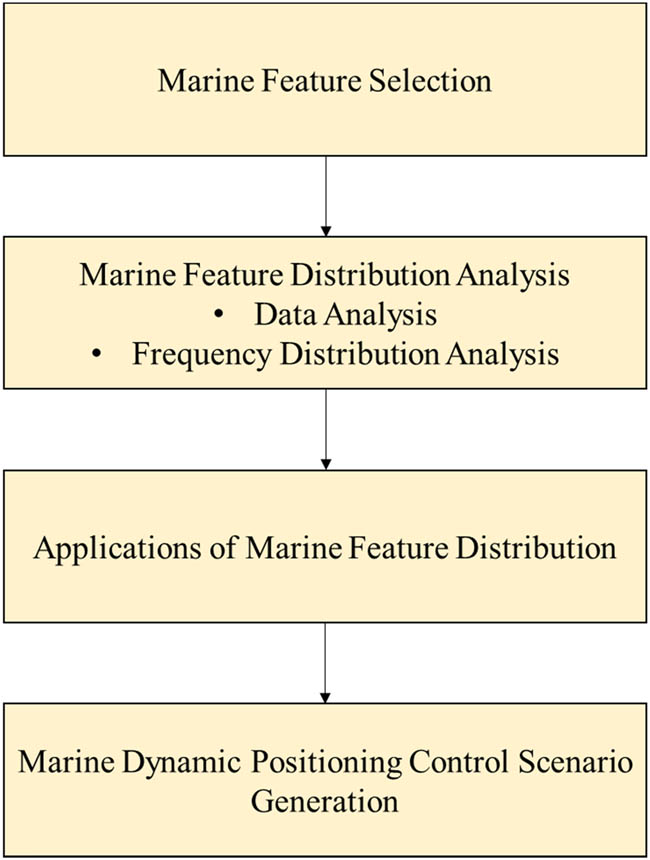
Elements of dynamic positioning control.
1.1 Contribution
This article addresses the problem of the periodic law of high-frequency motion by effectively identifying the influence of high-frequency motion on ship dynamic positioning. The article proposes a design for a dynamic positioning filter by applying nonlinear adaptive technology to eliminate the disturbance to the ship’s dynamic propulsion system. A method to control the ship’s dynamic positioning is proposed, and nonlinear adaptive technology in the dynamic positioning control is applied in order to obtain the ship’s state and reference coordinate system. Also, a mathematical model and a dynamic environmental model in ship dynamic positioning control are analyzed in this work. The control index model is located by the experimental data, and the control performance is improved to fit into an allowable range.
1.2 Organization
The rest of this article is organized as follows: Section 2 presents the literature review, followed by research methods used for dynamic positioning control in Section 3. Results are presented in Section 4 trailed by conclusion in Section 5.
2 Literature review
At present, considerable achievements have been made in the research of ship trajectory tracking control with the rapid development of nonlinear control theory. The inversion method proposed by Gao et al. can effectively avoid linearization of the ship model. It decomposes a complex nonlinear system into subsystems of no more than system order. The control law is designed, and the global exponential stability of the closed-loop system is obtained. However, the traditional inversion method needs to know the model parameters accurately, while the external environmental disturbances suffered by the actual system are often unknown. There may be an uncertainty of model parameters or completely unknown model parameters. Due to its strong robustness to unknown terms, sliding mode control has been widely used in various control problems [6]. Chen et al. adopted the exponential approach law to design the sliding mode controller and obtained accurate tracking of the ship’s straight and circular trajectory. However, this method is a little complicated to construct model transformation. The combination of sliding mode and inversion can enhance the robustness of the system and expand the application scope of inversion [7]. Yan et al. realized track tracking control of surface ships [8]. This assumption is too conservative, given the environment in which the ship is actually navigating. In addition, the sliding mode control needs to use symbolic functions and compensate for unknown terms by switching gain, which will inevitably cause a control jitter and damage system equipment [9]. To eliminate this conservative assumption, in the case of unknown terms and unknown bounds in the system, the robustness of the control system can be improved by using adaptive methods to estimate the bounds of unknown terms before designing the controller [10]. The chattering problem caused by sliding mode control can be effectively solved by using the boundary layer, filter, observer, and intelligent control methods. In the traditional boundary layer method, if the boundary layer thickness is small, then the control effect is good, but the chattering is large. However, if the boundary layer thickness is large, the opposite is true. Naglic et al. designed an improved integral boundary layer sliding mode surface. It can not only effectively prevent integral saturation, but also reduce the steady-state error and obtain a good control effect [11]. The hyperbolic tangent function is used to replace the traditional sign function of sliding mode to eliminate chattering effectively and realize the attitude tracking control of spacecraft. Through the low-pass filter at the output end of the controller, the high-frequency flutter signal of the controller is eliminated, and the chattering problem is effectively solved. The global exponential stability of the system is realized. The sliding mode buffeting problem is caused by the switching action to compensate for the unknown term of the system. The switching action can be avoided, thus avoiding the chattering problem [12]. El-Sabagh believed that the basic work for discovering abnormal ship trajectories is the prediction of the ship’s navigation dynamics. Through the prediction of the ship’s navigation trajectory, the changes in the ship’s trajectory can be found in time, which is conducive to the effective monitoring of ships. This method is also effective for the supervision of marine traffic, which is of great significance in the navigation domain. The nonlinear disturbance observer is designed, and the trajectory tracking control is realized by combining the inversion method and Lyapunov theory. The method approaches the switching part of the sliding mode controller to make the discontinuous control signals continuous to effectively reduce the chattering of the sliding mode [13].
Based on the current research, nonlinear adaptive technology is proposed to design the dynamic positioning filter. The system flowchart is depicted in Figure 2.
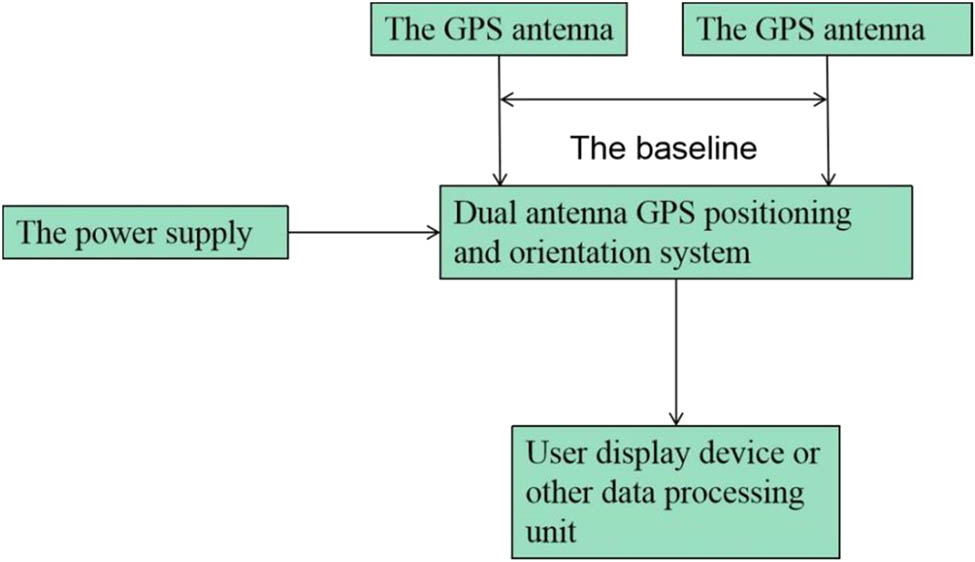
System working chart.
The control index model is positioned according to the experimental results. It was observed that the improved control performance is obtained for the proposed dynamic positioning model. The proposed model has strong stability and accuracy.
3 Research methods
3.1 Ship dynamic positioning control
3.1.1 Description of hull status
The dynamic positioning of a ship is affected by the state of the hull, which is mainly represented by the movement in six directions. They are swell, roll, heave, pitch, roll, and bow, and the motion modes produced by the six directional motions are different. The first three directions of motion act on linear motion, and the last three directions of motion act on torque rotation. When analyzing the ship’s dynamic positioning, only three directions of motion related to the state of motion need to be considered, namely, surge, roll, and bow [14]. In other words, as long as the three directions are well controlled, the ship’s dynamic positioning control can be completed.
3.1.2 Establish the reference coordinate system
In the course of navigation, the ship will be affected by environmental factors, which will cause disturbance to the ship’s dynamic positioning control. The environmental disturbance force directly acts on the position and heading of the ship, which can change the thrust distribution of the ship’s propeller [15]. Therefore, the ship’s mathematical model and reference coordinates should be established to analyze the movement of each axis, so as to facilitate the study of the ship’s dynamic positioning state and attitude.
3.1.3 Establish mathematical models
Ship dynamic positioning control should focus on studying force size and change of the ship under the state of motion. Under the influence of external factors, the motion law of the ship during navigation provides the ship motion that is a combination of high-frequency motion and low-frequency motion [16]. In high-frequency motion, the environmental disturbance will generate wave force on the ship motion, and affect the fuel consumption and performance of the ship’s dynamic positioning controller. However, in the control of high-frequency motion, a filter can be used for control. Further, for low-frequency motion, the wind force and the thrust of the hull itself are the main reasons for the low-frequency motion of the hull, so the ship should be kept at a low motion level to ensure the effectiveness of dynamic positioning control.
3.1.4 Establish the environment disturbance dynamic model
In ocean navigation, wind, wave, and current velocities are important disturbing factors that affect the navigation direction of ships. In the design of the ship’s dynamic positioning control system, it is necessary to consider the environmental disturbance force and establish the environmental disturbance force model. The influence of wind and waves on ship’s dynamic positioning is studied. In the wind model building, it is necessary to conduct wind tunnel tests and introduce previous research models to model the wind force, which is used to express the force change of the ship under the action of wind force. In the mathematical model of ocean waves, the force exerted by the waves on the heading of the ship is closely related to the high-frequency motion and heave motion of the ship. Therefore, the wave spectrum density formula can be used to describe waves, such as the Popper Newman spectrum, international towing tank conference two-parameter spectrum, etc. In the establishment of the mathematical model of ocean current, in order to simplify the calculation difficulty of the model, it is assumed that the ocean current flows uniformly, which mainly affects the hydrodynamic coefficient of ships. Thus, a mathematical model based on low speed and three degrees of freedom can be established.
3.2 Application of nonlinear adaptive technology in dynamic positioning control
3.2.1 Nonlinear adaptive technology
The development of nonlinear adaptive technology is closely related to the ship dynamic positioning control system. It is mainly reflected in the application of a dynamic positioning controller. In the nonlinear system, the Kalman filter can be used to build the nonlinear filtering method. By establishing the measurement model, the nonlinear function is introduced. Kalman’s fundamental equation is used to estimate the state, so as to improve the accuracy of the nonlinear adaptive system [17,18,19]. In order to ensure the effectiveness of nonlinear adaptive technology, a nonlinear estimation filter should be designed for the ship’s dynamic positioning control system to further enhance the stability and robustness of dynamic positioning control. It is assumed that the ship will encounter a variety of unpredictable factors in the course of navigation, and these factors are now taken as noise signals. The nonlinear model is established and the ship motion mathematical model is introduced to optimize the nonlinear filter model. The ship’s position and heading measurement system will generate disturbing forces without the influence of the ship. The filter is regarded as the thrust device, and the measured values of the position and heading sensors are given, and then the ship motion is estimated.
3.2.2 Dynamic positioning controller model based on nonlinear adaptive technology
In ship dynamic positioning control, the ship model can be transformed linearly. The model predictive control (MPC) algorithm is used to construct the mathematical model and play the role of the controller. MPC is to obtain the optimal solution in the rolling optimization and output the optimal solution as a component in the system to obtain the next measured value. This operation is repeated with the measurement to perform rolling optimization. Therefore, under the comprehensive consideration of ship motion factors, the following positioning control index model can be obtained, as shown in formula (1):
In the model, the linear system can obtain the optimal input sequence at time T; however, this solution is not the optimal global solution, and the optimization training needs to be repeated to obtain the output value at time T + 1. One must keep scrolling through the steps above to find the optimal position and trajectory. In order to simplify the process of obtaining the optimal solution, the restrictive conditions can be omitted, and the system errors can be optimized by means of feedback correction, so as to ensure the accuracy of the control results of ship dynamic positioning and make the system output value reach the expected value.
In the ship dynamic positioning control, nonlinear adaptive technology is applied to build a discrete model to improve the control performance, as shown in formula (2):
where A, C, and B are, respectively, the discrete coefficient matrix, combined with MPC algorithm, the prediction can be realized in any time domain state.
4 Results and analysis
In the ship dynamic positioning control, the ship model can be linearly transformed, and the mathematical model can be constructed with the help of the MPC algorithm to play the role of the controller. This section provides the parameter initialization and outcome computation for the ship’s dynamic positioning control.
Assuming that the hull construction mass is uniform and the hull coordinate system is located at the center of the hull, the mass center of the hull is regarded as the origin of the reference coordinate system. See Figure 3 for details.
Ship motion reference coordinate system based on dynamic positioning control.
The coordinate system is the plane coordinate system, the X-axis is perpendicular to the transverse section, the Y-axis is perpendicular to the longitudinal section, and the Z-axis is perpendicular to the horizontal plane. The research of the power controller needs to consider the ship as a rigid body, introduce the theory of mechanics and kinematics. It is necessary not only to analyze the current position and heading state of the ship from the geometric point of view. In addition, in order to study the relationship between the force and the change of ship motion direction under the influence of external factors from the perspective of mechanics, the law of moving ships in navigation is analyzed.
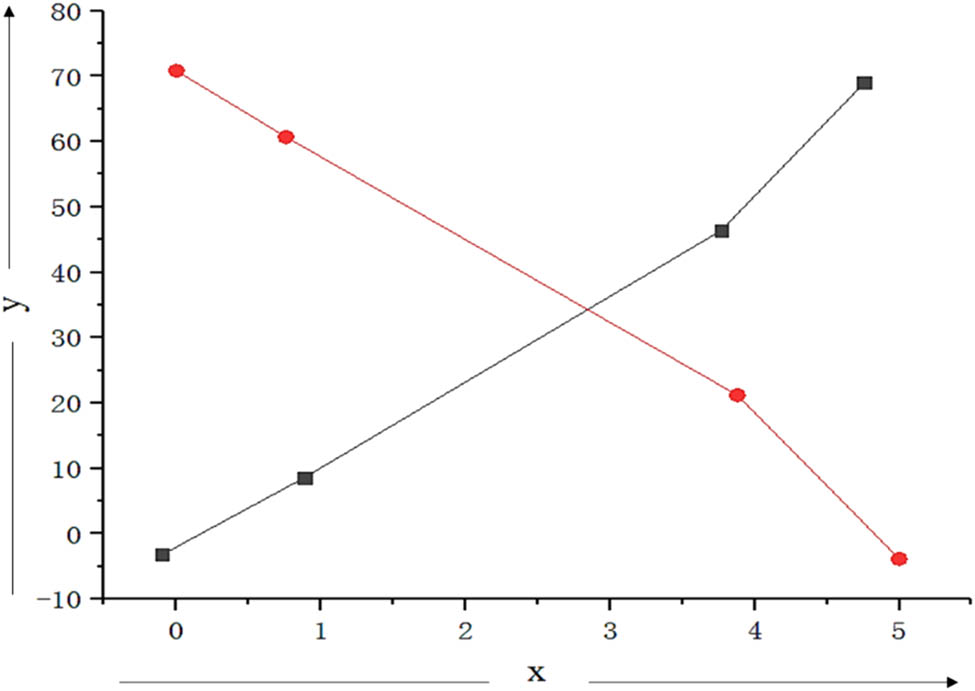
Under the influence of external factors, the motion law of the ship during navigation is shown in Figure 4.
The distribution of high- and low-frequency superposition motion of ships.
It can be seen that ship motion is actually a combination of high-frequency motion and low-frequency motion [16]. In high-frequency motion, the environmental disturbance will generate wave force on the ship motion, and affect the fuel consumption and performance of the ship’s dynamic positioning controller. However, it will not affect the position of the ship. In the control of high-frequency motion, filter can be used for control. For low-frequency motion, the wind force and the thrust of the hull are the main reasons for the low-frequency motion of the hull. Thus, in the case of dynamic positioning, the ship should be kept at a low motion level to ensure the effectiveness of dynamic positioning control.
MPC obtains the optimal solution in rolling optimization and outputs the optimal solution as a component in the system to obtain the next measured value. Then, the above operation for the measured value is repeated to perform rolling optimization. Ship’s dynamic positioning control is affected by the environment, its power, regional scope and other factors. In this simulation, nonlinear adaptive technology is used to verify the effectiveness of dynamic positioning control.
Parameter:
Take T = diag(1 × 103, 1 × 103, 1 × 103) and φ = diag(1 × 102, 1 × 102, 1 × 103).
Select the initial condition as η(0) = [20 m, 20 m, 10°]
T
, υ(0) = [0 n/s, 0 n/s, 0° n/s]
T
, b(0) = [10 kN, 10 kN, 100 kN m]
T
,
Dead zone breakpoint b 1 = b 2 = 8 × 10−3 and b 3 = 5 × 10−4.
The neural network
The designed DP control law makes the ship overcome the impact of marine environment disturbance after about 142 s, so it is positioned at the expected value η d = [0 m, 0 m, 0°] T , and the control signals τ 1, τ 2, and τ 3 are in line with the reality [20].
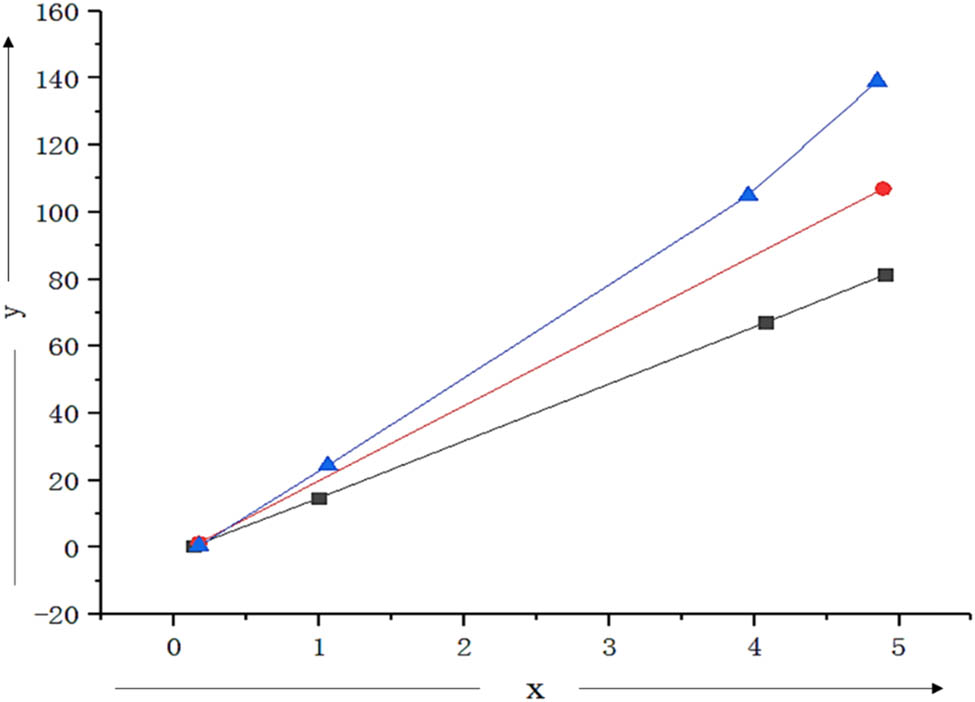
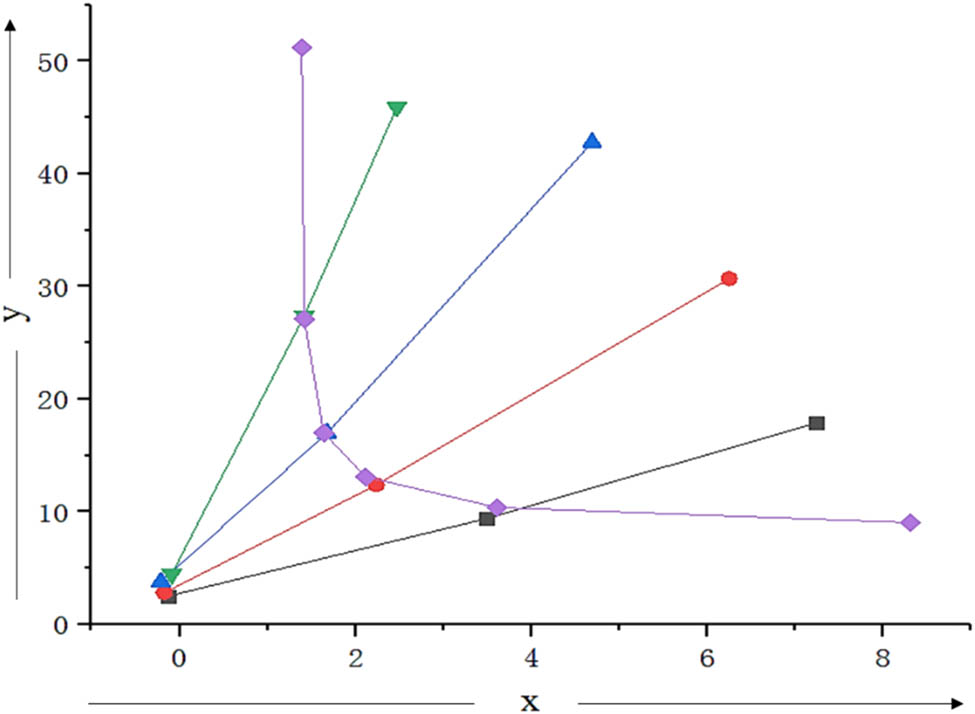
Let us say the initial position of the ship is (0, 0, 0), and the desired position is (100, 100, 0). The operation ranges are –0.6 × 107 to 0.6 × 107, –0.4 × 107 to 0.4 × 107, and –5.6 × 108 to 5.6 × 108. The range of motion is –150 to 150, –130 to 130, and –5 to 5. The wind disturbance force is 8 m/s, the wave disturbance force is 1 m/s, and the wind is 90 degrees. The MATLAB simulation platform is mainly used, and the simulation results are shown in Figures 5 and 6.
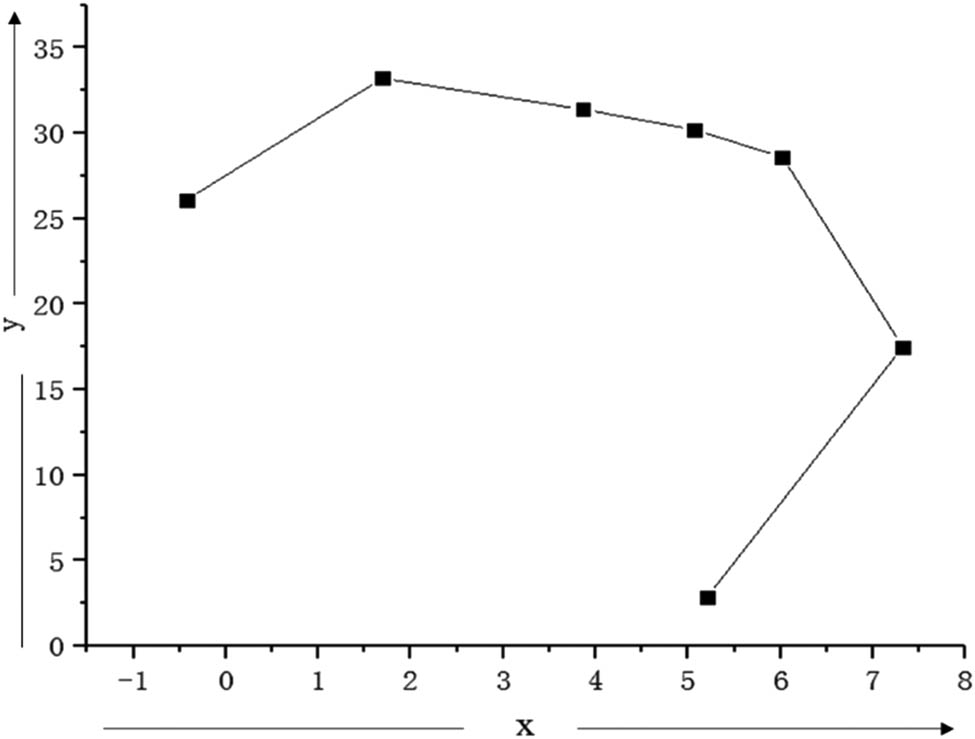
Change of ship movement and position under the dynamic positioning control model.
Change of heading angle under the dynamic positioning control.
It can be seen that, disturbed by environmental factors, the proposed dynamic positioning control model based on nonlinear adaptive technology can meet the requirements of ship dynamic positioning and enable the ship to reach the target position smoothly from the starting position [21,22,23]. Although there is some deviation, the deviation is small, within the allowable range [24,25]. After 90 s, the ship can basically achieve stable operation when the environmental disturbance is controlled within the error range. It shows that the proposed dynamic positioning model has strong stability.
5 Conclusions
In this paper, the ship’s state, reference coordinate system, mathematical model, and environmental dynamic model in ship’s dynamic positioning control are analyzed. The application of nonlinear adaptive technology in dynamic positioning control is proposed, and the simulation analysis is carried out. The control index model is located by the experimental data, and the improved control performance shows that the dynamic positioning model proposed in this paper has strong stability and accuracy. The article designs a robust nonlinear control law for dynamic positioning with the fault-tolerant capability of the ship propeller. The command of the designed dynamic positioning control law is the ship’s surge control force, roll control force, and bow rolling control moment, and the actual command signal executed by the ship is the command signal of the propeller. This paper considers the low-frequency motion mathematical model; the design of the control law ignores the high-frequency environmental disturbance. The influence of these factors on the system stability is discussed. The degree of impact and finding ways to effectively overcome these impacts are challenging research directions. In the subsequent research, the ship route can be predicted by combining the factors that affect the navigation, so that the trajectory of the ship can be predicted more accurately. The future direction for this work is to assess the abnormal navigation; the reasons can be analyzed in terms of time delay and saturation constraints of the control variables time to avoid shipping accidents that may occur in the process. Further, the research in the future can focus on designing reasonable performance evaluation indexes by considering the ship’s energy conservation and emission reduction and safe navigation. This will be beneficial for the optimization of command control force distribution and torque to give the command signal of each propeller.
-
Funding information: The authors state no funding involved.
-
Author contributions: All authors have accepted responsibility for the entire content of this manuscript and approved its submission.
-
Conflict of interest: The authors state no conflict of interest.
References
[1] Guo MZ, Guo C, Zhang C. Sins/gnss-integrated navigation of surface vessels based on various nonlinear kalman filters and large ship dynamics. J Electr Eng Technol. 2020;16(2):1–16.10.1007/s42835-020-00537-zSearch in Google Scholar
[2] Liu Y, Bu R, Gao X. Ship trajectory tracking control system design based on sliding mode control algorithm. Pol Marit Res. 2018;25(3):26–34.10.2478/pomr-2018-0093Search in Google Scholar
[3] Stateczny A, Burdziakowski P, Najdecka K, Domagalska-Stateczna B. Accuracy of trajectory tracking based on nonlinear guidance logic for hydrographic unmanned surface vessels. Sensors. 2020;20(3):832.10.3390/s20030832Search in Google Scholar PubMed PubMed Central
[4] Veselov G, Tselykh A, Sharma A. Introduction to the Special Issue: Futuristic trends and emergence of technology in biomedical, nonlinear dynamics and control engineering. J Vibroengineering. 2021;23(6):1315–7.10.21595/jve.2021.22226Search in Google Scholar
[5] Wu F, Zhu C, Xu J, Bhatt MW, Sharma A. Research on image text recognition based on canny edge detection algorithm and k-means algorithm. Int J Syst Assur Eng Manag. 2022;13:72–80.10.1007/s13198-021-01262-0Search in Google Scholar
[6] Gao B, Cai K, Qu T, Hu Y, Chen H. Personalized adaptive cruise control based on online driving style recognition technology and model predictive control. IEEE Trans Vehicular Technol. 2020;69(11):12482–96.10.1109/TVT.2020.3020335Search in Google Scholar
[7] Chen YW, Zhang R, Hsu CW, Chang GK. Key enabling technologies for the post-5g era: fully adaptive, all-spectra coordinated radio access network with function decoupling. IEEE Commun Mag. 2020;58(9):60–6.10.1109/MCOM.001.2000186Search in Google Scholar
[8] Yan Q, Li W, Li J, Zhang J, Sheng H. Real-time air-to-ground data communication technology of aeroengine health management system with adaptive rate in the whole airspace. Math Probl Eng. 2021;2021(7):1–13.10.1155/2021/9912574Search in Google Scholar
[9] Rouhani S, Deters R. Data trust framework using blockchain technology and adaptive transaction validation. IEEE Access. 2021;9:90379–91.10.1109/ACCESS.2021.3091327Search in Google Scholar
[10] Barclay N, Westine CD, Claris A, Martin F. Development and implementation of adaptive learning to engage learners in engineering technology. J Form Des Learn. 2020;4(2):107–18.10.1007/s41686-020-00050-6Search in Google Scholar
[11] Naglic M, Popov M, van der Meijden Mart AMM, Terzija V. Synchronized measurement technology supported online generator slow coherency identification and adaptive tracking. IEEE Trans Smart Grid. 2020;11(4):3405–17.10.1109/TSG.2019.2962246Search in Google Scholar
[12] Huang R, Yan P, Yang X. Knowledge map visualization of technology hotspots and development trends in China’s textile manufacturing industry. IET Collab Intell Manuf. 2021;3(3):243–51.10.1049/cim2.12024Search in Google Scholar
[13] El-Sabagh HA. Adaptive e-learning environment based on learning styles and its impact on development students’ engagement. Int J Educ Technol High Educ. 2021;18(1):1–24.10.1186/s41239-021-00289-4Search in Google Scholar
[14] Xin L, Chengyu M, Yang C. Power station flue gas desulfurization system based on automatic online monitoring platform. J Digital Inf Manag. 2015;13(6):480–8.Search in Google Scholar
[15] Chen G, Wu T, Zhou Z. Research on ship meteorological route based on a-star algorithm. Math Probl Eng. 2021;2021(7):1–8.10.1155/2021/9989731Search in Google Scholar
[16] Xu C, Yin C, Wang D, Han W. Fast ship detection combining visual saliency and a cascade CNN in SAR images. IET Radar Sonar Navig. 2020;14(12):1879–87.10.1049/iet-rsn.2020.0113Search in Google Scholar
[17] Fan M, Sharma A. Design and implementation of construction cost prediction model based on svm and lssvm in industries 4.0. Int J Intell Comput Cybern. 2021;14:145–57. (ahead-of-print).10.1108/IJICC-10-2020-0142Search in Google Scholar
[18] Jia Z, Sharma A. Review on engine vibration fault analysis based on data mining. J Vibroengineering. 2021;23(6):1433–45.10.21595/jve.2021.21928Search in Google Scholar
[19] Paga PG, Nagaraj HC, Shashidhara KS, Dakulagi V, Yeap KH. Design and analysis of printed monopole antenna with and without CSRR in the ground plane for GSM 900 and Wi-Fi. Electrica. 2022:22(1):92–100.10.5152/electrica.2021.21080Search in Google Scholar
[20] Jayakumar J, Chacko S, Ajay P. Conceptual implementation of artificial intelligent based E-Mobility controller in smart city environment. Wirel Commun Mob Comput. 2021;2021:1–8.10.1155/2021/5325116Search in Google Scholar
[21] Ren X, Li C, Ma X, Chen F, Wang H, Sharma A, et al. Design of multi-information fusion based intelligent electrical fire detection system for green buildings. Sustainability. 2021;13(6):3405.10.3390/su13063405Search in Google Scholar
[22] Dokur E, Ceyhan S, Kurban M. Analysis of wind speed data using finsler, weibull, and rayleigh distribution functions. Electrica. 2022;22(1):52–60.10.5152/electrica.2021.21044Search in Google Scholar
[23] Chen Y, Zhang W, Dong L, Cengiz K, Sharma A. Study on vibration and noise influence for optimization of garden mower. Nonlinear Eng. 2021;10(1):428–35.10.1515/nleng-2021-0034Search in Google Scholar
[24] Dong J, Sharma A, Sharma P. Mathematical model analysis of axisymmetric nozzle performance prediction for complex system based on numerical simulation. Int J Syst Assur Eng Manag. 2021;1:1884–2023.10.1007/s13198-021-01117-8Search in Google Scholar
[25] Wang J, Xiao Y, Li T, Chen CP. Impacts of GPS Spoofing on path planning of unmanned surface ships. Electronics. 2022;11(5):801.10.3390/electronics11050801Search in Google Scholar
© 2022 Haihui Dong et al., published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Research Articles
- Fractal approach to the fluidity of a cement mortar
- Novel results on conformable Bessel functions
- The role of relaxation and retardation phenomenon of Oldroyd-B fluid flow through Stehfest’s and Tzou’s algorithms
- Damage identification of wind turbine blades based on dynamic characteristics
- Improving nonlinear behavior and tensile and compressive strengths of sustainable lightweight concrete using waste glass powder, nanosilica, and recycled polypropylene fiber
- Two-point nonlocal nonlinear fractional boundary value problem with Caputo derivative: Analysis and numerical solution
- Construction of optical solitons of Radhakrishnan–Kundu–Lakshmanan equation in birefringent fibers
- Dynamics and simulations of discretized Caputo-conformable fractional-order Lotka–Volterra models
- Research on facial expression recognition based on an improved fusion algorithm
- N-dimensional quintic B-spline functions for solving n-dimensional partial differential equations
- Solution of two-dimensional fractional diffusion equation by a novel hybrid D(TQ) method
- Investigation of three-dimensional hybrid nanofluid flow affected by nonuniform MHD over exponential stretching/shrinking plate
- Solution for a rotational pendulum system by the Rach–Adomian–Meyers decomposition method
- Study on the technical parameters model of the functional components of cone crushers
- Using Krasnoselskii's theorem to investigate the Cauchy and neutral fractional q-integro-differential equation via numerical technique
- Smear character recognition method of side-end power meter based on PCA image enhancement
- Significance of adding titanium dioxide nanoparticles to an existing distilled water conveying aluminum oxide and zinc oxide nanoparticles: Scrutinization of chemical reactive ternary-hybrid nanofluid due to bioconvection on a convectively heated surface
- An analytical approach for Shehu transform on fractional coupled 1D, 2D and 3D Burgers’ equations
- Exploration of the dynamics of hyperbolic tangent fluid through a tapered asymmetric porous channel
- Bond behavior of recycled coarse aggregate concrete with rebar after freeze–thaw cycles: Finite element nonlinear analysis
- Edge detection using nonlinear structure tensor
- Synchronizing a synchronverter to an unbalanced power grid using sequence component decomposition
- Distinguishability criteria of conformable hybrid linear systems
- A new computational investigation to the new exact solutions of (3 + 1)-dimensional WKdV equations via two novel procedures arising in shallow water magnetohydrodynamics
- A passive verses active exposure of mathematical smoking model: A role for optimal and dynamical control
- A new analytical method to simulate the mutual impact of space-time memory indices embedded in (1 + 2)-physical models
- Exploration of peristaltic pumping of Casson fluid flow through a porous peripheral layer in a channel
- Investigation of optimized ELM using Invasive Weed-optimization and Cuckoo-Search optimization
- Analytical analysis for non-homogeneous two-layer functionally graded material
- Investigation of critical load of structures using modified energy method in nonlinear-geometry solid mechanics problems
- Thermal and multi-boiling analysis of a rectangular porous fin: A spectral approach
- The path planning of collision avoidance for an unmanned ship navigating in waterways based on an artificial neural network
- Shear bond and compressive strength of clay stabilised with lime/cement jet grouting and deep mixing: A case of Norvik, Nynäshamn
- Communication
- Results for the heat transfer of a fin with exponential-law temperature-dependent thermal conductivity and power-law temperature-dependent heat transfer coefficients
- Special Issue: Recent trends and emergence of technology in nonlinear engineering and its applications - Part I
- Research on fault detection and identification methods of nonlinear dynamic process based on ICA
- Multi-objective optimization design of steel structure building energy consumption simulation based on genetic algorithm
- Study on modal parameter identification of engineering structures based on nonlinear characteristics
- On-line monitoring of steel ball stamping by mechatronics cold heading equipment based on PVDF polymer sensing material
- Vibration signal acquisition and computer simulation detection of mechanical equipment failure
- Development of a CPU-GPU heterogeneous platform based on a nonlinear parallel algorithm
- A GA-BP neural network for nonlinear time-series forecasting and its application in cigarette sales forecast
- Analysis of radiation effects of semiconductor devices based on numerical simulation Fermi–Dirac
- Design of motion-assisted training control system based on nonlinear mechanics
- Nonlinear discrete system model of tobacco supply chain information
- Performance degradation detection method of aeroengine fuel metering device
- Research on contour feature extraction method of multiple sports images based on nonlinear mechanics
- Design and implementation of Internet-of-Things software monitoring and early warning system based on nonlinear technology
- Application of nonlinear adaptive technology in GPS positioning trajectory of ship navigation
- Real-time control of laboratory information system based on nonlinear programming
- Software engineering defect detection and classification system based on artificial intelligence
- Vibration signal collection and analysis of mechanical equipment failure based on computer simulation detection
- Fractal analysis of retinal vasculature in relation with retinal diseases – an machine learning approach
- Application of programmable logic control in the nonlinear machine automation control using numerical control technology
- Application of nonlinear recursion equation in network security risk detection
- Study on mechanical maintenance method of ballasted track of high-speed railway based on nonlinear discrete element theory
- Optimal control and nonlinear numerical simulation analysis of tunnel rock deformation parameters
- Nonlinear reliability of urban rail transit network connectivity based on computer aided design and topology
- Optimization of target acquisition and sorting for object-finding multi-manipulator based on open MV vision
- Nonlinear numerical simulation of dynamic response of pile site and pile foundation under earthquake
- Research on stability of hydraulic system based on nonlinear PID control
- Design and simulation of vehicle vibration test based on virtual reality technology
- Nonlinear parameter optimization method for high-resolution monitoring of marine environment
- Mobile app for COVID-19 patient education – Development process using the analysis, design, development, implementation, and evaluation models
- Internet of Things-based smart vehicles design of bio-inspired algorithms using artificial intelligence charging system
- Construction vibration risk assessment of engineering projects based on nonlinear feature algorithm
- Application of third-order nonlinear optical materials in complex crystalline chemical reactions of borates
- Evaluation of LoRa nodes for long-range communication
- Secret information security system in computer network based on Bayesian classification and nonlinear algorithm
- Experimental and simulation research on the difference in motion technology levels based on nonlinear characteristics
- Research on computer 3D image encryption processing based on the nonlinear algorithm
- Outage probability for a multiuser NOMA-based network using energy harvesting relays
Articles in the same Issue
- Research Articles
- Fractal approach to the fluidity of a cement mortar
- Novel results on conformable Bessel functions
- The role of relaxation and retardation phenomenon of Oldroyd-B fluid flow through Stehfest’s and Tzou’s algorithms
- Damage identification of wind turbine blades based on dynamic characteristics
- Improving nonlinear behavior and tensile and compressive strengths of sustainable lightweight concrete using waste glass powder, nanosilica, and recycled polypropylene fiber
- Two-point nonlocal nonlinear fractional boundary value problem with Caputo derivative: Analysis and numerical solution
- Construction of optical solitons of Radhakrishnan–Kundu–Lakshmanan equation in birefringent fibers
- Dynamics and simulations of discretized Caputo-conformable fractional-order Lotka–Volterra models
- Research on facial expression recognition based on an improved fusion algorithm
- N-dimensional quintic B-spline functions for solving n-dimensional partial differential equations
- Solution of two-dimensional fractional diffusion equation by a novel hybrid D(TQ) method
- Investigation of three-dimensional hybrid nanofluid flow affected by nonuniform MHD over exponential stretching/shrinking plate
- Solution for a rotational pendulum system by the Rach–Adomian–Meyers decomposition method
- Study on the technical parameters model of the functional components of cone crushers
- Using Krasnoselskii's theorem to investigate the Cauchy and neutral fractional q-integro-differential equation via numerical technique
- Smear character recognition method of side-end power meter based on PCA image enhancement
- Significance of adding titanium dioxide nanoparticles to an existing distilled water conveying aluminum oxide and zinc oxide nanoparticles: Scrutinization of chemical reactive ternary-hybrid nanofluid due to bioconvection on a convectively heated surface
- An analytical approach for Shehu transform on fractional coupled 1D, 2D and 3D Burgers’ equations
- Exploration of the dynamics of hyperbolic tangent fluid through a tapered asymmetric porous channel
- Bond behavior of recycled coarse aggregate concrete with rebar after freeze–thaw cycles: Finite element nonlinear analysis
- Edge detection using nonlinear structure tensor
- Synchronizing a synchronverter to an unbalanced power grid using sequence component decomposition
- Distinguishability criteria of conformable hybrid linear systems
- A new computational investigation to the new exact solutions of (3 + 1)-dimensional WKdV equations via two novel procedures arising in shallow water magnetohydrodynamics
- A passive verses active exposure of mathematical smoking model: A role for optimal and dynamical control
- A new analytical method to simulate the mutual impact of space-time memory indices embedded in (1 + 2)-physical models
- Exploration of peristaltic pumping of Casson fluid flow through a porous peripheral layer in a channel
- Investigation of optimized ELM using Invasive Weed-optimization and Cuckoo-Search optimization
- Analytical analysis for non-homogeneous two-layer functionally graded material
- Investigation of critical load of structures using modified energy method in nonlinear-geometry solid mechanics problems
- Thermal and multi-boiling analysis of a rectangular porous fin: A spectral approach
- The path planning of collision avoidance for an unmanned ship navigating in waterways based on an artificial neural network
- Shear bond and compressive strength of clay stabilised with lime/cement jet grouting and deep mixing: A case of Norvik, Nynäshamn
- Communication
- Results for the heat transfer of a fin with exponential-law temperature-dependent thermal conductivity and power-law temperature-dependent heat transfer coefficients
- Special Issue: Recent trends and emergence of technology in nonlinear engineering and its applications - Part I
- Research on fault detection and identification methods of nonlinear dynamic process based on ICA
- Multi-objective optimization design of steel structure building energy consumption simulation based on genetic algorithm
- Study on modal parameter identification of engineering structures based on nonlinear characteristics
- On-line monitoring of steel ball stamping by mechatronics cold heading equipment based on PVDF polymer sensing material
- Vibration signal acquisition and computer simulation detection of mechanical equipment failure
- Development of a CPU-GPU heterogeneous platform based on a nonlinear parallel algorithm
- A GA-BP neural network for nonlinear time-series forecasting and its application in cigarette sales forecast
- Analysis of radiation effects of semiconductor devices based on numerical simulation Fermi–Dirac
- Design of motion-assisted training control system based on nonlinear mechanics
- Nonlinear discrete system model of tobacco supply chain information
- Performance degradation detection method of aeroengine fuel metering device
- Research on contour feature extraction method of multiple sports images based on nonlinear mechanics
- Design and implementation of Internet-of-Things software monitoring and early warning system based on nonlinear technology
- Application of nonlinear adaptive technology in GPS positioning trajectory of ship navigation
- Real-time control of laboratory information system based on nonlinear programming
- Software engineering defect detection and classification system based on artificial intelligence
- Vibration signal collection and analysis of mechanical equipment failure based on computer simulation detection
- Fractal analysis of retinal vasculature in relation with retinal diseases – an machine learning approach
- Application of programmable logic control in the nonlinear machine automation control using numerical control technology
- Application of nonlinear recursion equation in network security risk detection
- Study on mechanical maintenance method of ballasted track of high-speed railway based on nonlinear discrete element theory
- Optimal control and nonlinear numerical simulation analysis of tunnel rock deformation parameters
- Nonlinear reliability of urban rail transit network connectivity based on computer aided design and topology
- Optimization of target acquisition and sorting for object-finding multi-manipulator based on open MV vision
- Nonlinear numerical simulation of dynamic response of pile site and pile foundation under earthquake
- Research on stability of hydraulic system based on nonlinear PID control
- Design and simulation of vehicle vibration test based on virtual reality technology
- Nonlinear parameter optimization method for high-resolution monitoring of marine environment
- Mobile app for COVID-19 patient education – Development process using the analysis, design, development, implementation, and evaluation models
- Internet of Things-based smart vehicles design of bio-inspired algorithms using artificial intelligence charging system
- Construction vibration risk assessment of engineering projects based on nonlinear feature algorithm
- Application of third-order nonlinear optical materials in complex crystalline chemical reactions of borates
- Evaluation of LoRa nodes for long-range communication
- Secret information security system in computer network based on Bayesian classification and nonlinear algorithm
- Experimental and simulation research on the difference in motion technology levels based on nonlinear characteristics
- Research on computer 3D image encryption processing based on the nonlinear algorithm
- Outage probability for a multiuser NOMA-based network using energy harvesting relays