Design of motion-assisted training control system based on nonlinear mechanics
-
Yong Ma


Abstract
In order to improve the level of intelligent rehabilitation training equipment and assist patients to effectively restore the walking function, a motion-assisted training control system based on nonlinear mechanics is proposed. According to the robot direction of lower limb rehabilitation equipment studied in this article, a stable, safe, and reliable mechanical structure system is designed to optimize the structure, and the anti-overturning stability of the robot static system and dynamic system is analyzed. Then, through the human-computer interaction system, the robot automatically realizes the automatic forward and backward, left and right turn, anti-overspeed, anti-fall, and other functions. A joint simulation platform of rehabilitation robot speed control was built using MATLAB and ADAMS to verify the effectiveness of the designed control algorithm. The results showed that users slowly increased their training speed from 1 to 5, walking at approximately 0.3 m/s. The user adapts slowly during the use process, and through training, and the walking speed is improved slowly. Therefore, the lower limb rehabilitation equipment training robot is highly applicable, convenient for operation, with good robot control performance, high stability, and good mobility ability.
1 Introduction
How can robot-assisted sports training help athletes or the general population improve their sports ability, or even repair their damaged sports function, and establish efficient sports training methods [1]. Improving the level of training characteristics and the efficiency of brain-machine-body matching and establishing an objective training evaluation and prediction system are both hot and difficult points in the field of physical training [2]. The mechanical structure design of the lower limb rehabilitation training robot is mainly designed in ref. [3]. The stability of the system is studied, and the kinematics and dynamics of the robot are expounded in ref. [4]. First, the structure of the robot is designed according to the working environment, demand, and the gait characteristics of the disabled. Then, the anti-overturning stability analysis of static system and dynamic system is carried out to optimize the mechanical structure of the designed robot. In the research of lower limb rehabilitation training robot, the reasonable design and optimization of mechanical structure are of great significance for the comfort of users, the accuracy of information collection, and the effectiveness of lower limb rehabilitation walking training [5].
In the process of lower limb rehabilitation training robot structure design, using modern institutional design method, in order to reduce costs and the development cycle, we use computer aided design, mechanism principle design, strength design, machining process design, and assembly process design, which can be completed in 3-D software. The mechanical structure development flow chart of this project is shown in Figure 1.
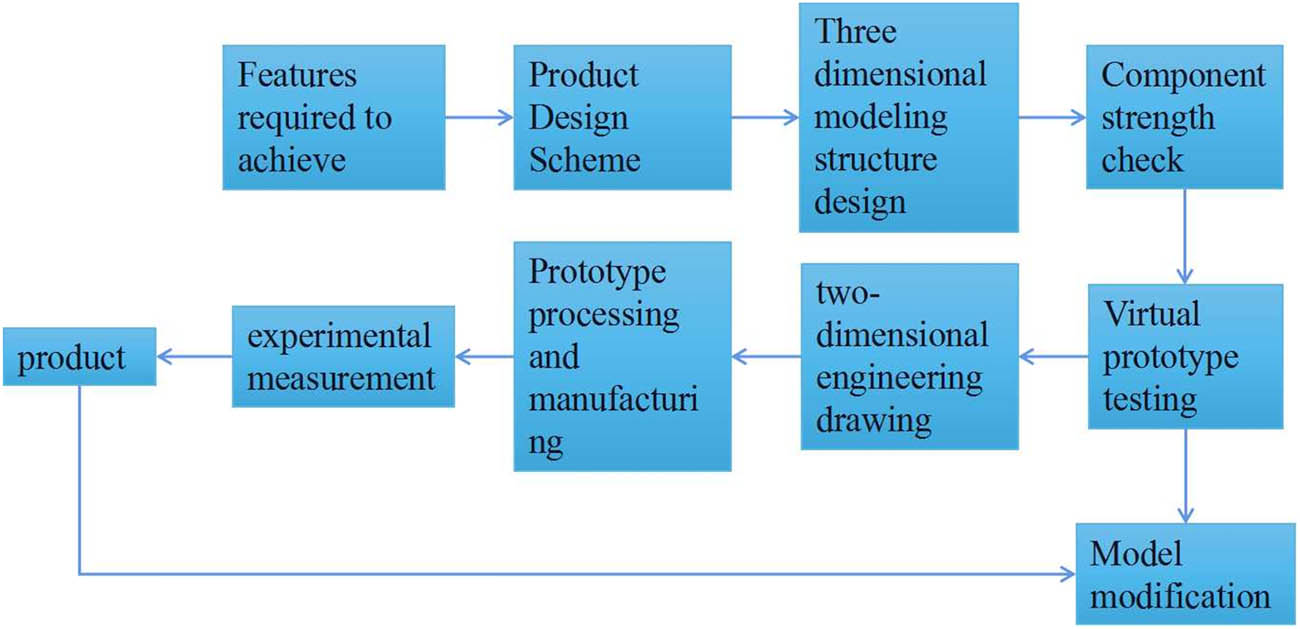
Mechanical structure development.
This article proposes the design of motion-assisted training control system based on nonlinear mechanics. The specific track training was carried out in the experiment site, and the time of several movements was recorded during the experiment, and the data were analyzed. As shown in Table 1, it can be seen that the training speed of users gradually increased from the first to the fifth time. Relatively speaking, the turning process takes a longer time than the straight process, which indicates that the user gradually adapts to the use process and improves the walking speed slowly through training. According to the analysis of experimental data, the walking speed of general lower limb disabled people is about 0.3 m/s. It is proved that the method has good reliability and stability, sensitivity, and accuracy when executing commands.
Experimental data and analysis
| Movement/Times | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| Forward | 49 s | 45 s | 43 s | 43 s | 38 s |
| Turn left | 41 s | 35 s | 26 s | 25 s | 27 s |
| Turn right | 39 s | 31 s | 29 s | 24 s | 24 s |
| Backward | 50 s | 46 s | 45 s | 42 s | 35 s |
| Average velocity (km/h) | 0.72 | 0.76 | 0.77 | 0.71 | 0.69 |
2 Literature review
With the development of science and technology, the technology of intelligent rehabilitation equipment has been constantly improved, and robotic lower limb rehabilitation training equipment has become the trend of future development. Therefore, it is of great practical significance to design reasonable and comfortable lower limb rehabilitation training equipment to help disabled patients recover health, return to normal life, and reduce the burden of family and society.
Ali-Akbari et al. aiming at the pelvic motion control mechanism, established the kinematics model of the system under the condition of full drive to plan the motion trajectory of the operating end, and analyzed the precision of the control output under the condition of underdrive. On this basis, the influence of mechanism inertia on driving characteristics is analyzed [6]. Koyasako et al. achieved the access edge of performing real-time motion control on the edge server located in the central office. An access edge configuration and control method for providing time-varying time delay compensation based on delay information is proposed. The control performance of the method is evaluated in a high network load environment when delay increase and packet loss occur. When the downstream flow changes from 9 to 10 Gbps, the motor control stabilization times are 2.7 and 8.0 s, respectively, and the conventional methods cannot control the motor in either case [7]. For the difficulties in motion control and performance analysis of hexaped robots, Jin et al. used the stm32 embedded controller to drive the 18-channel steering gear control board to control the movement of the robot. The CAM Shift algorithm was designed to track the centroid target of the motion robot and calculate the motion velocity. Gait test and performance analysis of linear motion and steering motion are carried out on a self-developed prototype. The results show that the design combines machine vision tracking technology with motion control technology of hexpedal robot to achieve control and motion analysis functions [8]. A digital cam servo motion system based on a digital twin was designed by Xu et al. Using the virtual and real interaction capability of the digital twin technology, the trajectory planning, state monitoring, and precise control of the electronic cam motion are realized by using the multi-dimensional simulation software. The results show that the digital twin-driven electronic cam servo motion control is well observable, robust, and adaptive. Its feasibility and practicability provide a reference for the design, manufacture, and application of electronic cams using digital twin technology [9].
3 Research methods
3.1 Mechanical system construction of human lower limb walking rehabilitation training robot
3.1.1 Overall mechanical structure design of the robot
In the whole robot system development, the structural design of mechanical system is very critical, if you want to achieve the function of the robot, the first thing to design is a good mechanical structure [10,11]. For the human lower limb walking rehabilitation training robot, according to the research target group’s working environment, the user’s lower limb gait analysis, as well as the needs generated according to personal physical conditions, and considering the characteristics of lower limb rehabilitation equipment at home and abroad, it is concluded that the robot needs to meet the following basic principles:
The size of the contour should meet the physiological structure needs of the target group and the needs of the working environment;
The body weight of most patients should be supported stably to prevent capsizing;
The structure of parts should be easy to measure and process, the overall structure should be easy to install and disassemble, and to test and debug at ordinary times;
Under the condition of ensuring stability and strength, should be lightweight as far as possible.
3.1.2 The walking pattern of the robot
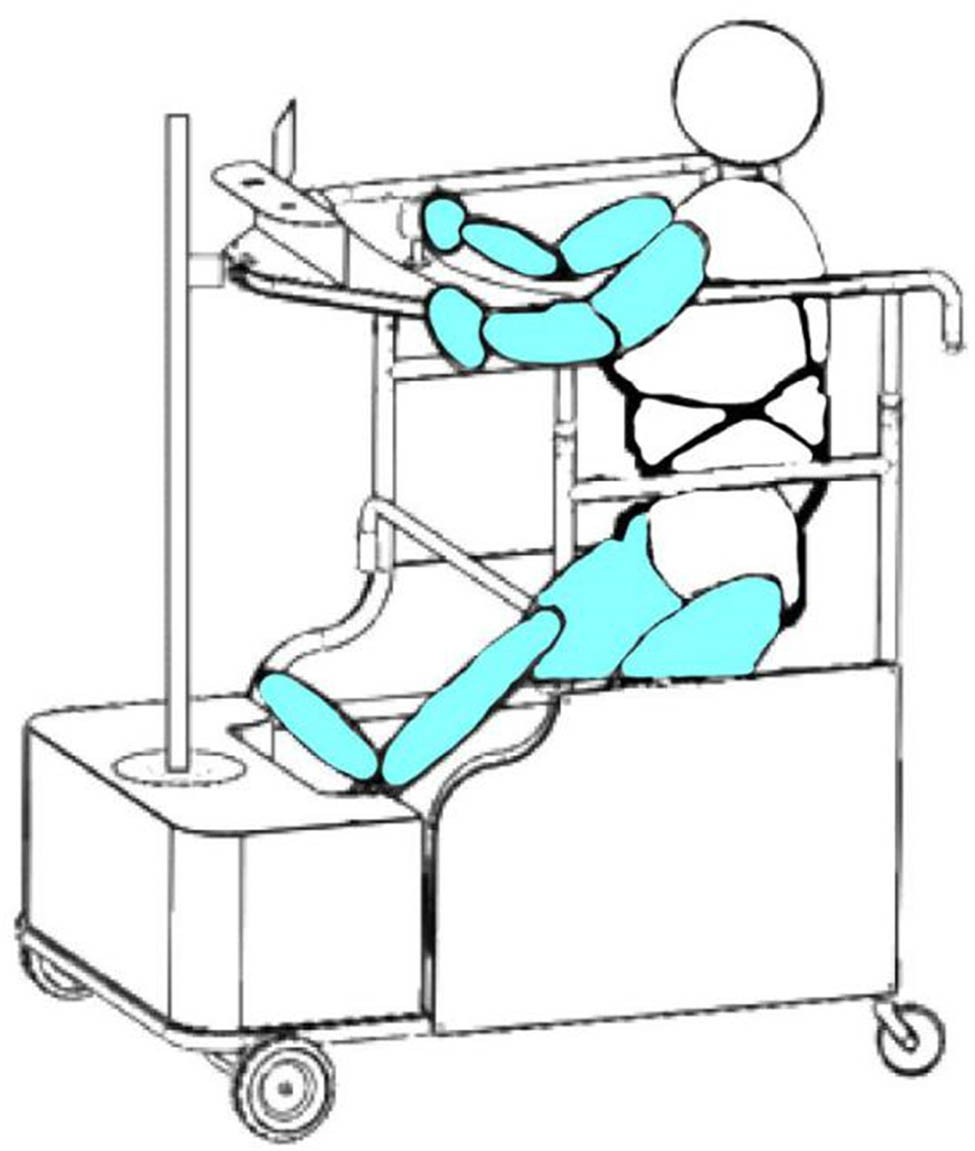
In the process of using the robot, the main behavior is divided into automatic forward, backward, left, right, and so on. The robot can collect the user’s will and automatically control its behavior robot [12]. When encountering obstacles or the user falls due to physical discomfort, a tension sensor attached to the patient’s waist detects a change in the value of the tension, and then goes into protective mode, stopping the robot. Figure 2 shows the normal lower limb training. Figure 3 shows the use mode of falling.

Normal walking pattern.
Fall protection mode.
3.1.3 Structure of robot mobility system
In this system, the mobile chassis is mainly composed of the driving wheel which provides power to the system and the universal wheel which plays a supporting role, when running in the opposite direction, make a left or right turn, which is achieved by the system differential. At the same time, the speed of the system is proportional to the amplitude of the auxiliary armrest. In the system, the forward and backward thrust is f l, and the left and right turn thrust is f s, as shown in Eqs. (1) and (2):
Among them,
where v is the movement speed of each driving wheel, and K v is the amplification factor.
3.2 Research on anti-overturning stability of robot
When the elderly or hemiplegic patients use the lower limb rehabilitation training robot, the user may fall down on the robot due to the physical condition or because of the uphill, downhill, or uneven road, which may make the robot overturn. A robot should increase its stability by adjusting its center of gravity through changes in configuration, posture, or dimensional structure, and prevent the robot from capsizing. When we design the robot, the system must provide a stable support to prevent the user from being hurt. First, a max value is set for the robot speed (V) (V max). When V ≥ V max, the system brakes and provides a stable support for device users, such as the elderly or people with hemiplegia. In this case, the brake is not an emergency stop to avoid slamming into the user, and the brake is not too slow to drag the user.
3.2.1 Stability analysis of static system
When a patient or a hemiplegic accidentally falls, the user will collide, will lean sideways on the robot – when the whole system is static, the patient tilts to the right and leans against the side of the robot. The robot is subjected to forces as shown in Figure 4, which are calculated and analyzed, where Mg is the gravity of the robot body, and h and L are the height and width of the robot, respectively. F is the pressure on the robot as the patient dumps on it, θ is the included angle between the pressure and the vertical Y direction during dumping, F decomposes into F
x
and F
y
. In addition, the robot receives the support force of the ground F
N
and the static friction force F
f, while the user receives the support force of the ground F
hN
and the friction force of the ground F
hf
. The reaction force F′ of the robot on the user is decomposed into
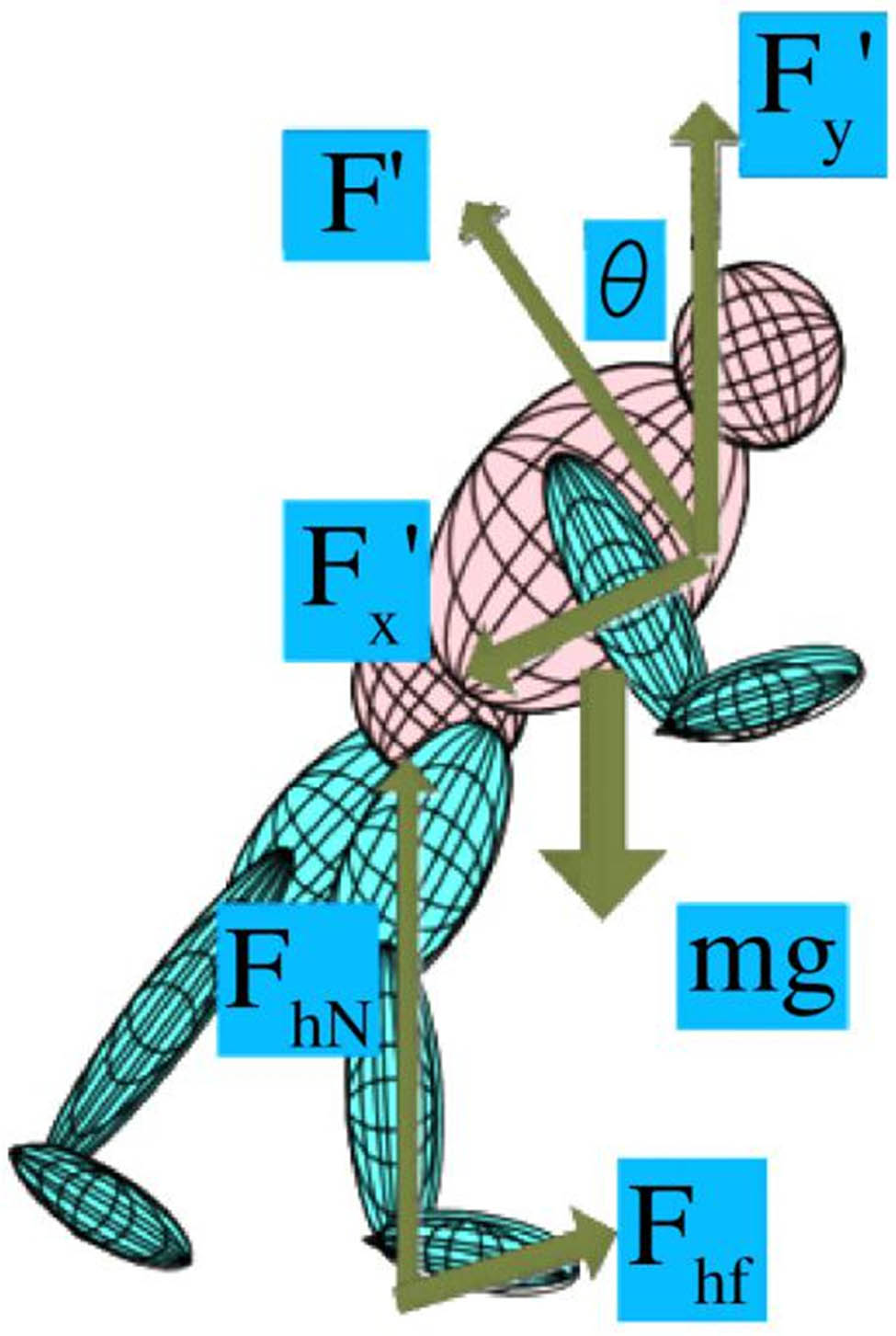
Static system robot force diagram.
Since there is a braking distance when the robot stops, then
According to the force analysis, the force is analyzed in the Y direction. When it is in a static system, the following conditions are established according to the force, as shown in Eqs. (5) and (6):
According to the analysis of torque balance, the system will not overturn when the Eq. (7) is established:
When Eq. (8) is established, the system will overturn and turn to the right:
According to Figure 4, the force analysis is carried out when the user does not fall, and it is established as shown in Eqs. (9) and (10):
The possibility of dumping at the limit position is analyzed as follows. When it is in the critical condition limit position, that is, θ = 90°, the following conditions of no dumping must be met, as shown in Eq. (11):
Therefore, according to the above analysis, we can clearly see the various factors that affect the stability of the robot. We can summarize the factors that cause the robot to overturn as follows:
The quality of the robot;
Patient quality;
Width and height of the robot;
The friction coefficient of the ground.
Therefore, in this project, when analyzing the structure of the robot, attention should be paid to the position of the center of gravity of the robot, which must be on the left and right symmetry axis of the robot, and the height should be as low as possible, and the larger the width of the robot, the better [13,14].
3.3 Kinematics and nonlinear mechanics analysis of the robot
Kinematics shows the changing law of robot speed and motion direction, and can reveal the changing law of the system essentially. The study of the kinematic model is also the basis of the motion simulation, and the characteristics of the system can be displayed more intuitively in the subsequent simulation. Since the lower limb rehabilitation training robot contains two driving wheels and two driven wheels, only the driving wheel at the front of the mobility system is considered here, because the two universal driven wheels only play the role of auxiliary support in the process of system operation and have no other constraints on the movement of the whole system.
The kinematic description of the robot is shown in Eqs. (12) and (13):
Inverse kinematics solution:
Forward kinematics solution:
Referring to the dynamic modeling of the two-wheeled mobile robot, the dynamic description of the robot is shown in Eq. (14):
where,
4 Result analysis
4.1 Motor proportion-integral-differential (PID) control strategy
According to the structure and signal transmission characteristics, the control system has two methods: Open-loop control does not need to consider the output quantity, nor does it need to feedback the controlled quantity to the input end to compare with the input quantity. The control function directly gives the output, the controlled quantity has no influence on the system, and the signal is transmitted in one direction. For each given quantity, there is a definite working state in response to each other, but the output cannot automatically produce the corresponding control effect to be corrected, the anti-interference ability of the system is poor, and the control precision is not high [15,16]. Compared with the open-loop control system, the closed-loop control system has a complex structure, but its anti-interference ability is strong, high precision, and good dynamic performance can be achieved. In the case of consistency with the input calibration accuracy, the control system with relatively high precision can be composed of components and devices with low precision. If the control part of the robot can be well designed, the human lower limb walking rehabilitation training robot will be more effective in function realization [17,18].
The position and speed control of the motor is the underlying drive of the actuator. PID control algorithm is adopted. Theory and practice have proved that PID is a better control algorithm for the controlled object. Its control formula is shown below:
4.2 Robot speed control based on fuzzy logic
4.2.1 Working principle of Fuzzy controller system
Fuzzy controller is a kind of language controller which adopts fuzzy control rules and takes fuzzy mathematics as the fundamental and computer as the realization method, it is also an innovative computer research method [19]. Advantages of fuzzy control system:
Because it is never possible to get the characteristics of fuzzy control system, it is not suitable for accurate mathematical model, but better for relatively complex systems or fuzzy objects.
Fuzzy controller is usually implemented by computer and can accurately realize digital control and convenient real programming.
The fuzzy control knowledge base which is composed of the knowledge reserve of many experts or the effective experience accumulated by the experienced operators can be improved continuously in the process of oral learning and continuous update to make the fuzzy control more intelligent.
It has very good robustness and adaptability, because it can effectively process and analyze any environment and any controlled object.
The characteristics of the human-machine interface of the fuzzy control system are easy to master, easy to learn, and are friendly human-machine interaction [20].
4.2.2 The basic structure of fuzzy controller
The basic structure of the fuzzy controller is shown in Figure 5.
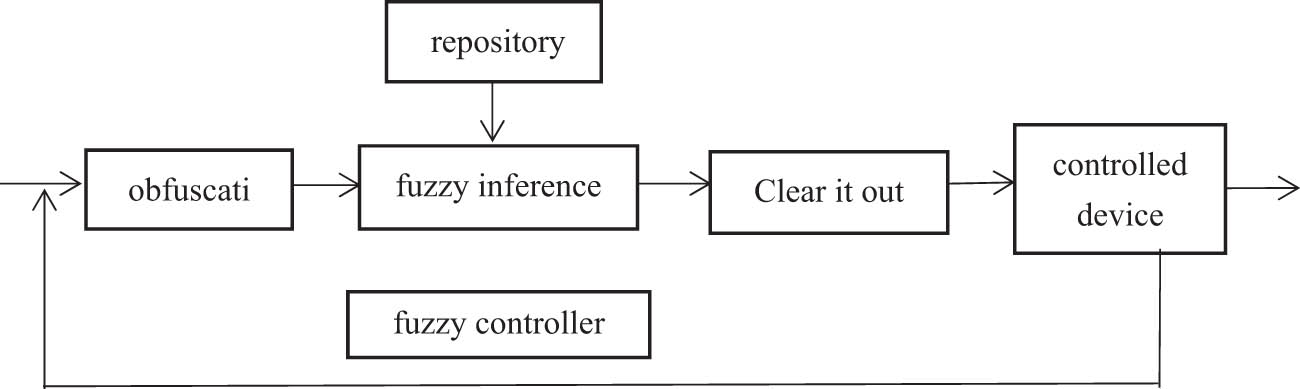
Basic structure of fuzzy controller.
4.3 Experiment test of robot turning and walking
In the process of turning and walking experiment, experiments of turning left and right of the robot were carried out. The human-computer interaction method was the control handle, which sends data to the main control board every 10 ms. When turning left, the left-hand speed of the robot increases with the increase in the voltage signal by manipulating the handle to the left; when turning right, the right-hand speed of the robot increases with the decrease in the voltage signal by manipulating the handle to the right. In the process of the robot turning left and right, the data of the output voltage signal of the control handle are fed back through the wireless serial port and analyzed, as shown in Figure 6.
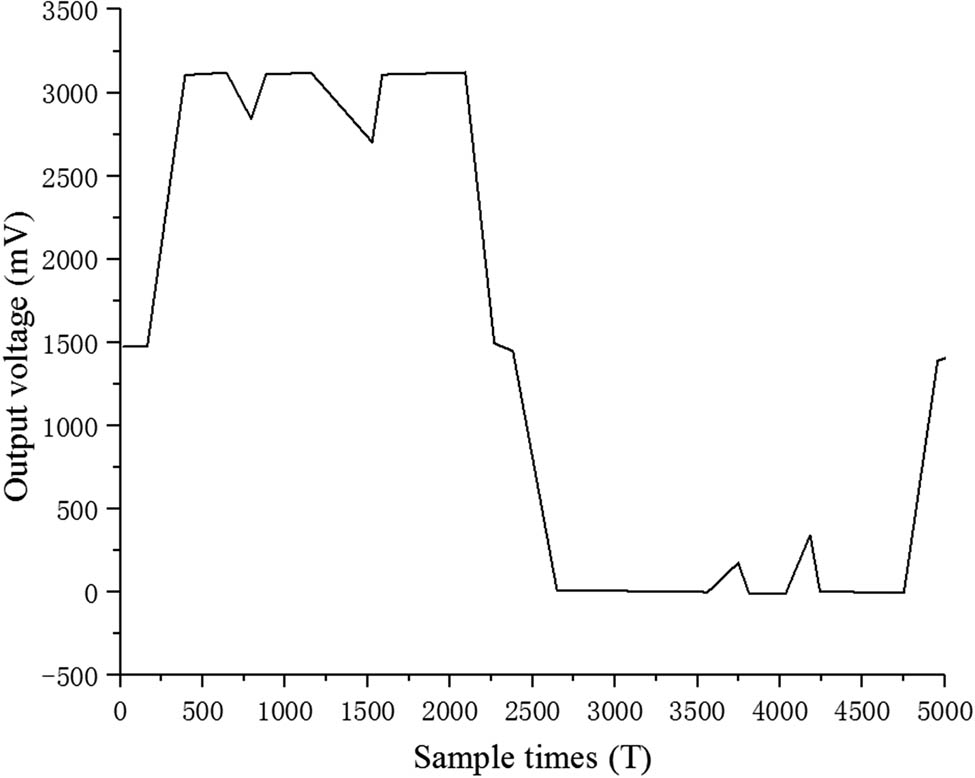
Robot turning and walking experiment.
As shown in Figure 6, the running time of the robot in the whole experiment is 50 s, and the number of information sampling by the control handle is about 5,000 times. During 0–25 s, the robot makes a left turn, the output voltage signal range is approximately 1,500–3,200 mV. During the period of 25–50 s, the robot makes a right turn and the output voltage signal range is approximately 0–1,500 mV. In the process of control, the user needs to adjust the speed according to the actual turning situation, so the output voltage signal will be changed according to the user’s operation.
4.4 Examples of clinical application of robots
In order to better verify the experimental effect of this device in practical application, we conducted more systematic experimental training in China Rehabilitation Research Center, the specific track training was carried out in the experiment site, and the time of several movements was recorded during the experiment, and the data were analyzed. As shown in Table 1, it can be seen that from the first time to the fifth time, the training speed of the user gradually improves, and the turning process takes longer than the straight process, this shows that the user slowly adapts to the use, and through training, the walking speed gradually improves. According to the analysis of experimental data, the walking speed of general lower limb disabled people is about 0.3 m/s.
According to the feedback from the user, it can be concluded that the robot has strong applicability, convenient operation, good control performance, high stability, can act timely and accurately according to the user’s instructions to make the corresponding action, and has good maneuvering ability.
5 Conclusion
With the development of artificial intelligence technology, robot technology, and rehabilitation medicine, rehabilitation robot has become a new means of motor nerve rehabilitation therapy, and is an effective supplement to the traditional conventional rehabilitation therapy. Whether the robot is stable or not depends on the high-sensitivity and high-precision control system and sensors. The research shows that the hardware platform and software module of the lower limb rehabilitation robot have good reliability and stability, as well as the sensitivity and accuracy when executing commands, at the same time, it can effectively improve the treatment efficiency, shorten the treatment cycle, and save the medical cost. The user slowly adapts during the use process, and through training, the walking speed slowly improves. According to experimental data analysis, the walking speed of people with general lower limb disabilities is about 0.3 m/s.
-
Funding information: The author states no funding involved.
-
Author contributions: Author has accepted responsibility for the entire content of this manuscript and approved its submission.
-
Conflict of interest: The author states no conflict of interest.
References
[1] Wu Y, Song Y, Huang H, Ye F, Xie X, Jin H. Enhancing graph neural networks via auxiliary training for semi-supervised node classification. Knowl Syst. 2021;220(7513):106884.10.1016/j.knosys.2021.106884Search in Google Scholar
[2] Liu X, Lin Z, Lin Z. An auxiliary system for rehabilitation training. J Phys: Conf Ser. 2021;1920:012078.10.1088/1742-6596/1920/1/012078Search in Google Scholar
[3] Shen H, Zhang J, Yang B, Jia B. Development of an educational virtual reality training system for marine engineers. Computer Appl Eng Educ. 2019;27(3):580–602.10.1002/cae.22099Search in Google Scholar
[4] Ambridge B, Rowland CF, Gummery A. Teaching the unlearnable: a training study of complex yes/no questions. Lang Cognition. 2020;12(2):1–26.10.1017/langcog.2020.5Search in Google Scholar
[5] Samala RK, Chan HP, Hadjiiski L, Helvie MA, Richter CD, Cha KH. Breast cancer diagnosis in digital breast tomosynthesis: effects of training sample size on multi-stage transfer learning using deep neural nets. IEEE Trans Med Imaging. 2019;38(3):686–96.10.1109/TMI.2018.2870343Search in Google Scholar PubMed PubMed Central
[6] Ali-Akbari HR, Ceballes S, Abdelkefi A. Nonlinear performance analysis of forced carbon nanotube-based bio-mass sensors. Int J Mech Mater Des. 2019;15(2):291–315.10.1007/s10999-018-9414-9Search in Google Scholar
[7] Koyasako Y, Suzuki T, Kim SY, Kani JI, Terada J. Motion control system with time-varying delay compensation for access edge computing. IEEE Access. 2021;9:90669–76.10.1109/ACCESS.2021.3091707Search in Google Scholar
[8] Jin Y, Li D, Qian F, Wang B. Design of control system and motion analysis of vision capture for small hexapod robot. MATEC Web Conf. 2021;336(18):03004.10.1051/matecconf/202133603004Search in Google Scholar
[9] Xu J, Guo T. Application and research on digital twin in electronic cam servo motion control system. Int J Adv Manuf Technol. 2021;112(1):1–14.10.1007/s00170-020-06553-7Search in Google Scholar
[10] Jung SW, Jung YG, Yang TS. Development of auxiliary learning data application (app) for psychological skill training of gymnast. J Korean Soc Study Phys Educ. 2019;24(3):189–202.10.15831/JKSSPE.2019.24.3.189Search in Google Scholar
[11] Gauba A. Assess the effectivness of training programme on auxiliary nurse midwives related to new born care. Indian J Public Health Res Dev. 2021;12(1):26–9.Search in Google Scholar
[12] Li C, Cui J. Intelligent sports training system based on artificial intelligence and big data. Mob Inf Syst. 2021;2021(1):1–11.10.1155/2021/9929650Search in Google Scholar
[13] Tian K, Xu Y, Guan J, Zhou S. Network as regularization for training deep neural networks: framework, model and performance. Proceedings of the AAAI Conference on Artificial Intelligence; 2020 Feb 7–12; New York (NY), USA. AAAI Press; 2020. p. 6013–20.10.1609/aaai.v34i04.6063Search in Google Scholar
[14] Zhang S. Research on servo motor motion control system based on Beckhoff PLC. J Phys Conf Ser. 2021;1852(2):022002.10.1088/1742-6596/1852/2/022002Search in Google Scholar
[15] Farkh R, Jaloud KA, Alhuwaimel S, Quasim MT, Ksouri M. A deep learning approach for the mobile-robot motion control system. Intell Autom Soft Comput. 2021;29(2):423–35.10.32604/iasc.2021.016219Search in Google Scholar
[16] Lin Y, Qu Q, Lin Y, He J, Jia J. Customizing robot-assisted passive neurorehabilitation exercise based on teaching training mechanism. BioMed Res Int. 2021;2021(31):1–10.10.1155/2021/9972560Search in Google Scholar PubMed PubMed Central
[17] Yoon MH, Oh DW. Effects of robot-assisted gait training with active motion visual feedback induced by guidance force on walking speed in patients with chronic stroke: a pilot study. Physiotherapy Q. 2020;28(3):56–61.10.5114/pq.2020.95776Search in Google Scholar
[18] Rodgers H, Bosomworth H, Krebs HI, Wijck FV, Shaw L. Robot-assisted training compared with an enhanced upper limb therapy programme and with usual care for upper limb functional limitation after stroke: the RATULS three-group RCT. Health Technol Assess (Winchester, Engl). 2020;24(54):1–232.10.3310/hta24540Search in Google Scholar PubMed PubMed Central
[19] Su Y, Su L. Intelligent medical rehabilitation training instrument based on movement coordination. IEEE Access. 2020;8:73373–87.10.1109/ACCESS.2020.2986800Search in Google Scholar
[20] Kwak J, Choi W, Chan L, Oh S. Gravity and impedance compensation of body weight support system driven by two series elastic actuators. IEEE/ASME Trans Mechatron. 2021;27(1):190–201.10.1109/TMECH.2021.3060394Search in Google Scholar
© 2022 Yong Ma, published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Research Articles
- Fractal approach to the fluidity of a cement mortar
- Novel results on conformable Bessel functions
- The role of relaxation and retardation phenomenon of Oldroyd-B fluid flow through Stehfest’s and Tzou’s algorithms
- Damage identification of wind turbine blades based on dynamic characteristics
- Improving nonlinear behavior and tensile and compressive strengths of sustainable lightweight concrete using waste glass powder, nanosilica, and recycled polypropylene fiber
- Two-point nonlocal nonlinear fractional boundary value problem with Caputo derivative: Analysis and numerical solution
- Construction of optical solitons of Radhakrishnan–Kundu–Lakshmanan equation in birefringent fibers
- Dynamics and simulations of discretized Caputo-conformable fractional-order Lotka–Volterra models
- Research on facial expression recognition based on an improved fusion algorithm
- N-dimensional quintic B-spline functions for solving n-dimensional partial differential equations
- Solution of two-dimensional fractional diffusion equation by a novel hybrid D(TQ) method
- Investigation of three-dimensional hybrid nanofluid flow affected by nonuniform MHD over exponential stretching/shrinking plate
- Solution for a rotational pendulum system by the Rach–Adomian–Meyers decomposition method
- Study on the technical parameters model of the functional components of cone crushers
- Using Krasnoselskii's theorem to investigate the Cauchy and neutral fractional q-integro-differential equation via numerical technique
- Smear character recognition method of side-end power meter based on PCA image enhancement
- Significance of adding titanium dioxide nanoparticles to an existing distilled water conveying aluminum oxide and zinc oxide nanoparticles: Scrutinization of chemical reactive ternary-hybrid nanofluid due to bioconvection on a convectively heated surface
- An analytical approach for Shehu transform on fractional coupled 1D, 2D and 3D Burgers’ equations
- Exploration of the dynamics of hyperbolic tangent fluid through a tapered asymmetric porous channel
- Bond behavior of recycled coarse aggregate concrete with rebar after freeze–thaw cycles: Finite element nonlinear analysis
- Edge detection using nonlinear structure tensor
- Synchronizing a synchronverter to an unbalanced power grid using sequence component decomposition
- Distinguishability criteria of conformable hybrid linear systems
- A new computational investigation to the new exact solutions of (3 + 1)-dimensional WKdV equations via two novel procedures arising in shallow water magnetohydrodynamics
- A passive verses active exposure of mathematical smoking model: A role for optimal and dynamical control
- A new analytical method to simulate the mutual impact of space-time memory indices embedded in (1 + 2)-physical models
- Exploration of peristaltic pumping of Casson fluid flow through a porous peripheral layer in a channel
- Investigation of optimized ELM using Invasive Weed-optimization and Cuckoo-Search optimization
- Analytical analysis for non-homogeneous two-layer functionally graded material
- Investigation of critical load of structures using modified energy method in nonlinear-geometry solid mechanics problems
- Thermal and multi-boiling analysis of a rectangular porous fin: A spectral approach
- The path planning of collision avoidance for an unmanned ship navigating in waterways based on an artificial neural network
- Shear bond and compressive strength of clay stabilised with lime/cement jet grouting and deep mixing: A case of Norvik, Nynäshamn
- Communication
- Results for the heat transfer of a fin with exponential-law temperature-dependent thermal conductivity and power-law temperature-dependent heat transfer coefficients
- Special Issue: Recent trends and emergence of technology in nonlinear engineering and its applications - Part I
- Research on fault detection and identification methods of nonlinear dynamic process based on ICA
- Multi-objective optimization design of steel structure building energy consumption simulation based on genetic algorithm
- Study on modal parameter identification of engineering structures based on nonlinear characteristics
- On-line monitoring of steel ball stamping by mechatronics cold heading equipment based on PVDF polymer sensing material
- Vibration signal acquisition and computer simulation detection of mechanical equipment failure
- Development of a CPU-GPU heterogeneous platform based on a nonlinear parallel algorithm
- A GA-BP neural network for nonlinear time-series forecasting and its application in cigarette sales forecast
- Analysis of radiation effects of semiconductor devices based on numerical simulation Fermi–Dirac
- Design of motion-assisted training control system based on nonlinear mechanics
- Nonlinear discrete system model of tobacco supply chain information
- Performance degradation detection method of aeroengine fuel metering device
- Research on contour feature extraction method of multiple sports images based on nonlinear mechanics
- Design and implementation of Internet-of-Things software monitoring and early warning system based on nonlinear technology
- Application of nonlinear adaptive technology in GPS positioning trajectory of ship navigation
- Real-time control of laboratory information system based on nonlinear programming
- Software engineering defect detection and classification system based on artificial intelligence
- Vibration signal collection and analysis of mechanical equipment failure based on computer simulation detection
- Fractal analysis of retinal vasculature in relation with retinal diseases – an machine learning approach
- Application of programmable logic control in the nonlinear machine automation control using numerical control technology
- Application of nonlinear recursion equation in network security risk detection
- Study on mechanical maintenance method of ballasted track of high-speed railway based on nonlinear discrete element theory
- Optimal control and nonlinear numerical simulation analysis of tunnel rock deformation parameters
- Nonlinear reliability of urban rail transit network connectivity based on computer aided design and topology
- Optimization of target acquisition and sorting for object-finding multi-manipulator based on open MV vision
- Nonlinear numerical simulation of dynamic response of pile site and pile foundation under earthquake
- Research on stability of hydraulic system based on nonlinear PID control
- Design and simulation of vehicle vibration test based on virtual reality technology
- Nonlinear parameter optimization method for high-resolution monitoring of marine environment
- Mobile app for COVID-19 patient education – Development process using the analysis, design, development, implementation, and evaluation models
- Internet of Things-based smart vehicles design of bio-inspired algorithms using artificial intelligence charging system
- Construction vibration risk assessment of engineering projects based on nonlinear feature algorithm
- Application of third-order nonlinear optical materials in complex crystalline chemical reactions of borates
- Evaluation of LoRa nodes for long-range communication
- Secret information security system in computer network based on Bayesian classification and nonlinear algorithm
- Experimental and simulation research on the difference in motion technology levels based on nonlinear characteristics
- Research on computer 3D image encryption processing based on the nonlinear algorithm
- Outage probability for a multiuser NOMA-based network using energy harvesting relays
Articles in the same Issue
- Research Articles
- Fractal approach to the fluidity of a cement mortar
- Novel results on conformable Bessel functions
- The role of relaxation and retardation phenomenon of Oldroyd-B fluid flow through Stehfest’s and Tzou’s algorithms
- Damage identification of wind turbine blades based on dynamic characteristics
- Improving nonlinear behavior and tensile and compressive strengths of sustainable lightweight concrete using waste glass powder, nanosilica, and recycled polypropylene fiber
- Two-point nonlocal nonlinear fractional boundary value problem with Caputo derivative: Analysis and numerical solution
- Construction of optical solitons of Radhakrishnan–Kundu–Lakshmanan equation in birefringent fibers
- Dynamics and simulations of discretized Caputo-conformable fractional-order Lotka–Volterra models
- Research on facial expression recognition based on an improved fusion algorithm
- N-dimensional quintic B-spline functions for solving n-dimensional partial differential equations
- Solution of two-dimensional fractional diffusion equation by a novel hybrid D(TQ) method
- Investigation of three-dimensional hybrid nanofluid flow affected by nonuniform MHD over exponential stretching/shrinking plate
- Solution for a rotational pendulum system by the Rach–Adomian–Meyers decomposition method
- Study on the technical parameters model of the functional components of cone crushers
- Using Krasnoselskii's theorem to investigate the Cauchy and neutral fractional q-integro-differential equation via numerical technique
- Smear character recognition method of side-end power meter based on PCA image enhancement
- Significance of adding titanium dioxide nanoparticles to an existing distilled water conveying aluminum oxide and zinc oxide nanoparticles: Scrutinization of chemical reactive ternary-hybrid nanofluid due to bioconvection on a convectively heated surface
- An analytical approach for Shehu transform on fractional coupled 1D, 2D and 3D Burgers’ equations
- Exploration of the dynamics of hyperbolic tangent fluid through a tapered asymmetric porous channel
- Bond behavior of recycled coarse aggregate concrete with rebar after freeze–thaw cycles: Finite element nonlinear analysis
- Edge detection using nonlinear structure tensor
- Synchronizing a synchronverter to an unbalanced power grid using sequence component decomposition
- Distinguishability criteria of conformable hybrid linear systems
- A new computational investigation to the new exact solutions of (3 + 1)-dimensional WKdV equations via two novel procedures arising in shallow water magnetohydrodynamics
- A passive verses active exposure of mathematical smoking model: A role for optimal and dynamical control
- A new analytical method to simulate the mutual impact of space-time memory indices embedded in (1 + 2)-physical models
- Exploration of peristaltic pumping of Casson fluid flow through a porous peripheral layer in a channel
- Investigation of optimized ELM using Invasive Weed-optimization and Cuckoo-Search optimization
- Analytical analysis for non-homogeneous two-layer functionally graded material
- Investigation of critical load of structures using modified energy method in nonlinear-geometry solid mechanics problems
- Thermal and multi-boiling analysis of a rectangular porous fin: A spectral approach
- The path planning of collision avoidance for an unmanned ship navigating in waterways based on an artificial neural network
- Shear bond and compressive strength of clay stabilised with lime/cement jet grouting and deep mixing: A case of Norvik, Nynäshamn
- Communication
- Results for the heat transfer of a fin with exponential-law temperature-dependent thermal conductivity and power-law temperature-dependent heat transfer coefficients
- Special Issue: Recent trends and emergence of technology in nonlinear engineering and its applications - Part I
- Research on fault detection and identification methods of nonlinear dynamic process based on ICA
- Multi-objective optimization design of steel structure building energy consumption simulation based on genetic algorithm
- Study on modal parameter identification of engineering structures based on nonlinear characteristics
- On-line monitoring of steel ball stamping by mechatronics cold heading equipment based on PVDF polymer sensing material
- Vibration signal acquisition and computer simulation detection of mechanical equipment failure
- Development of a CPU-GPU heterogeneous platform based on a nonlinear parallel algorithm
- A GA-BP neural network for nonlinear time-series forecasting and its application in cigarette sales forecast
- Analysis of radiation effects of semiconductor devices based on numerical simulation Fermi–Dirac
- Design of motion-assisted training control system based on nonlinear mechanics
- Nonlinear discrete system model of tobacco supply chain information
- Performance degradation detection method of aeroengine fuel metering device
- Research on contour feature extraction method of multiple sports images based on nonlinear mechanics
- Design and implementation of Internet-of-Things software monitoring and early warning system based on nonlinear technology
- Application of nonlinear adaptive technology in GPS positioning trajectory of ship navigation
- Real-time control of laboratory information system based on nonlinear programming
- Software engineering defect detection and classification system based on artificial intelligence
- Vibration signal collection and analysis of mechanical equipment failure based on computer simulation detection
- Fractal analysis of retinal vasculature in relation with retinal diseases – an machine learning approach
- Application of programmable logic control in the nonlinear machine automation control using numerical control technology
- Application of nonlinear recursion equation in network security risk detection
- Study on mechanical maintenance method of ballasted track of high-speed railway based on nonlinear discrete element theory
- Optimal control and nonlinear numerical simulation analysis of tunnel rock deformation parameters
- Nonlinear reliability of urban rail transit network connectivity based on computer aided design and topology
- Optimization of target acquisition and sorting for object-finding multi-manipulator based on open MV vision
- Nonlinear numerical simulation of dynamic response of pile site and pile foundation under earthquake
- Research on stability of hydraulic system based on nonlinear PID control
- Design and simulation of vehicle vibration test based on virtual reality technology
- Nonlinear parameter optimization method for high-resolution monitoring of marine environment
- Mobile app for COVID-19 patient education – Development process using the analysis, design, development, implementation, and evaluation models
- Internet of Things-based smart vehicles design of bio-inspired algorithms using artificial intelligence charging system
- Construction vibration risk assessment of engineering projects based on nonlinear feature algorithm
- Application of third-order nonlinear optical materials in complex crystalline chemical reactions of borates
- Evaluation of LoRa nodes for long-range communication
- Secret information security system in computer network based on Bayesian classification and nonlinear algorithm
- Experimental and simulation research on the difference in motion technology levels based on nonlinear characteristics
- Research on computer 3D image encryption processing based on the nonlinear algorithm
- Outage probability for a multiuser NOMA-based network using energy harvesting relays