Research on contour feature extraction method of multiple sports images based on nonlinear mechanics
-
Jucui Wang
 ,
Mingzhi Li
,
Mingzhi Li
 ,
Uladzimir Hryneuski
and
Aleksandra Krylova
,
Uladzimir Hryneuski
and
Aleksandra Krylova

Abstract
This article solves the issue of long extraction time and low extraction accuracy in traditional moving image contour feature extraction methods. Here authors have explored deformable active contour model to research the image processing technology in scientific research and the application of multiple sports and the method. A B-spline active contour model based on dynamic programming method is proposed in this article. This article proposes a method of using it to face image processing and extracting computed tomography (CT) image data to establish a three-dimensional model. The Lyapunov exponent, correlation dimension and approximate entropy of the nonlinear dynamics algorithm were used to extract the features of eight types of motor imagination electroencephalogram (EEG) signals. The results show that the success rate of pose reconstruction is more than 97% when the contour extraction quality is relatively ideal. The method is also robust to image noise, and the success rate of pose reconstruction can reach 94% when the video image has large noise. The execution efficiency is sub-linear, which can basically meet the requirements of real-time processing in video-based human posture reconstruction. The proposed method has a low error rate in the calculation of curvature features, effectively reduces the time for extracting contour features of moving images, and improves the accuracy of feature information extraction.
1 Introduction
Contour extraction is an important research topic of computer vision. It has a wide application prospect in virtual reality, autonomous vehicle, robot environment analysis, object tracking, recognition in monitoring system, biomedical image processing, and industrial online automatic detection [1]. The reverse engineering technology has its domain in various fields. In the manufacturing field, reverse engineering is used for physical or model measurement to construct the geometric model of the object, and then used to improve the design and manufacturing. Reverse engineering technology is widely used in scientific research, engineering technology, and biomedical fields. This method helps in solving or helps to solve many problems such as geometric dimension measurement, deformation measurement, vibration mode testing, damage measurement, product quality monitoring, physical copy, computer aided design (CAD)/computer aided manufacturing (CAM), and medical diagnosis [2]. Deformable active contour model has brought new ideas and ways of thinking to traditional computer vision theory and application research, and has developed into one of the most active and successful research fields in computer vision and pattern recognition. Therefore, the study of image processing technology based on deformable active contour model is of great significance in scientific research and engineering application [3]. The basic steps for network parameter modification for computer vision application are provided in Figure 1 [4].
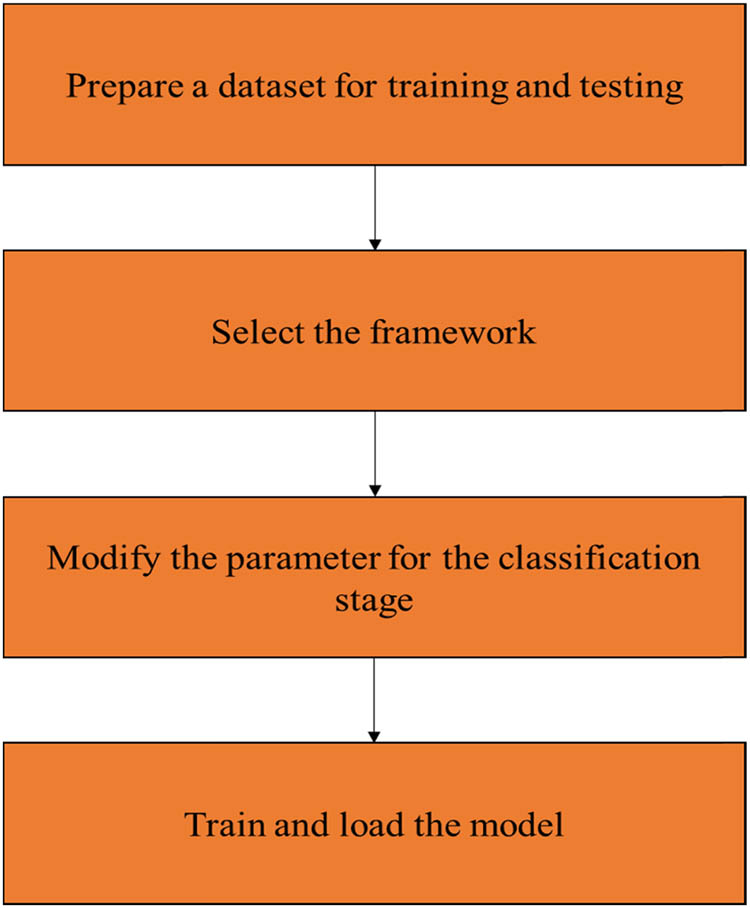
Basic steps for network parameter modification.
1.1 Literature review
Liu et al. used the deformable model to complete the segmentation and reconstruction of the left ventricle in 15 min, which is much less than the 1.5–2 h required by manual sketch [5]. In view of the deficiency that the traditional deformable surface could not accurately delineate the cerebral cortical groove [6], Gaur and Srivastav proposed a deforming surface based on the gradient vector flow force field for the reconstruction of the cerebral cortex, which improved the description of the cerebral cortex [7]. Rega et al. proposed a semi-automatic segmentation method combining user interaction with B-spline Snake (also known as B-Snake), which extracted hepatoma contour from ultrasound images and successfully applied it in the liver tumor surgery simulation system [8].
Nifa et al. proposed a B-spline deformable active contour model based on a dynamic programming method. The B-spline method is the most commonly used method for modeling free-form curves and surfaces, and dynamic programming is an effective method for solving discrete optimization problems. The model adopts the cubic B-spline curve segment controlled by the control point to represent the active contour, and then the control point is used to solve the dynamic programming method to realize the contour extraction of the image [9]. Anakhaev et al. stated that the model combines the advantages of the B-spline method and the dynamic programming method, and can converge to the target contour quickly and stably. The resulting B-spline profiles facilitate further surface reconstruction processing [10]. Rega et al. believed that with the continuous development of pattern recognition and image processing technology, contour feature extraction of moving images has received sufficient attention in the field of related sports [11]. Fischer and Neukamm indicated that the moving image is affected by a specific complex environment, which will cause problems such as blurred contour features and uneven curvature sign feature points [12]. Eremeyev et al. proposed that among the existing moving image contour feature extraction methods, the most widely used is the feature extraction method under threshold constraint. Setting the threshold value can quickly and accurately extract the information that the user is interested in the edge of the image, and it can automatically compensate for the inaccurate extraction caused by factors such as unclear images content [13]. Karaaal et al. proposed an image feature extraction method based on random forest algorithm, which uses the form of mathematical classification to set the threshold of the edge contour content information contained in the image, and adopts the optimized training random forest classification algorithm. The contour threshold is used for mapping and classification processing to achieve image contour feature extraction. However, this method processes the threshold in two parts, which leads to the long extraction time of the feature information of the algorithm [14]. Namnabat et al. proposed an image feature extraction method based on multi-scale fusion. The method uses a Gaussian pyramid to decompose moving images, divides the decomposition results into multi-scale spaces, and sets thresholds based on this to extract moving images’ multiscale features. This method has higher recognition rate, but lower segmentation accuracy [15]. Aiming at a series of problems existing in traditional methods, Georgievskii proposed a new feature extraction method – a method for extracting contour feature information of moving images with multi-threshold optimization [16]. Ruggeri et al. indicated that the feature boundaries of moving image contours are often blurred. The maximum inter-class variance method combined with the inter-class classification ability can be used to set multiple thresholds for moving image features, and the fuzzy membership function constraints are used to complete the multi-threshold calculation optimization [17]. Zhao et al. transformed the edges of moving images into image blur space according to the gray scale data space, and the moving image contour blur membership function can be replaced by a simpler linear function to obtain a fast and simple threshold [18].
1.2 Article contribution
This article solves the issue of long extraction time and low extraction accuracy in traditional moving image contour feature extraction methods. Deformable active contour is a hot research topic in the field of contour extraction. Feature extraction is a key step to ensure classification accuracy. Therefore, this work studies feature extraction methods for eight types of motor imagination tasks. Traditional analysis methods are usually difficult to ensure that data changes are within a controllable range when analyzing nonlinear systems, and at the same time, they cannot explain related problems [4]. With the continuous development of nonlinear dynamics, more and more evidences show that the brain is a nonlinear dynamic system, and the EEG signal can be regarded as its output. The introduction of nonlinear dynamics analysis method in the field of EEG signal processing can well explain the nonlinear characteristics of EEG sequence. Analysis methods of nonlinear dynamics include complexity, fractal dimension, Lyapunov exponent, correlation dimension (CD), etc., [5]. In this work, Lyapunov, CD, and approximate entropy methods were used to extract the features of eight types of motor imagination EEG signals, and the extraction effect of each method was analyzed. The execution efficiency is sub-linear and it can meet the requirements of real-time processing in video-based human posture reconstruction.
1.3 Article organization
The rest of this article is organized as: Section 2 presents the image contour features followed by experimental analysis in Section 3. Section 4 presents the concluding remarks of this article.
2 Methodology for image contour features
The classical snake model uses a set of discrete points to approximate the deformable contour, which will bring three obvious deficiencies. First, in the numerical calculation process, finite difference is used to directly approximate the derivation, resulting in numerical instability and reduced accuracy [19]. Second, the discrete characteristics of the model make the situation between two points on the contour uncertain, and the model lacks robustness. Third, in order to more approximately express the active contour, it is necessary to increase the number of discrete points, which will not only increase the calculation amount, but also cause “collision” between adjacent points in the convergence process, which reduces the operability of the contour [20]. The concept of B-spline was first proposed by Schoenberg in the 1940s: B-spline is a piecewise polynomial of degree K determined by a sequence u: u 0 ≤ u 1 ≤ … u i+k+1 of non-decreasing parameters u called node vector, that is, multinomial spline of degree K. Although scholars have different definition methods for B-spline, we decided to choose Clark’s definition method, which has the characteristics of visual and intuitive starting from geometric concept [21]. Clark defines the starting point of B-spline as follows: first, local approximation rather than interpolation is performed on the given point; second, there is a certain continuity requirement between adjacent approximate curve segments.
Let P i (t)(i = 1,2,…,n,t, ∈ [0,1]) point column A in the three-dimensional space be approximated by a sequence of curve segments P i (t)(i = 1,2,…,n,t, ∈ [0,1]), we require that the shape of each curve segment is only controlled by a number of sequential points in the point column (V 1, V 2,…,V 4), and has the following form (1):
Formula (1) is a one-time B-spline basis function [22]. If two basic functions are connected end to end, it is a one-order B-spline, as shown in Figure 2.
One-order B-spline basis function.
Lyapunov index is an important index to measure the dynamic characteristics of a system, which can measure the chaos or convergence between adjacent orbitals in phase space. When the maximum value of Lyapunov exponent is positive, the system is chaotic [23]. When Lyapunov exponents are all negative, the system converges. When the maximum Lyapunov exponent is 0, the system motion is periodic. When two or more Lyapunov exponentials are positive, the system is hyper chaotic. Lyapunov is defined as: take an n-dimensional infinitesimal sphere and let the sphere move along the trajectory with its own points as initial values [24]. Due to local deformation, the sphere will become an n-dimensional ellipsoid over time. Then, the ith Lyapunov exponent of orbital (
where P
i
(t) is the length of the ith spindle ellipsoid sphere axis at time
From the above derivation, it can be concluded that with the increase in the system dimension, the calculation amount will increase exponentially when calculating Lyapunov exponent [25]. Because the amount of data needed to calculate Lyapunov is very large, the application of Lyapunov is limited to some extent. CD is an extension of traditional dimension and is used to describe the degree of freedom of a system. CD has been widely used in the analysis of nonlinear dynamics. The EEG data collected in this work are one-dimensional sequences, and the phase space of the signal should be reconstructed before the calculation of CD algorithm [26]. The specific steps are as follows:
Construct the state space attractor through the single-time series of the original EEG signal, set the embedding dimension to m and the time delay to τ, and then the reconstructed phase space is shown in formula (4):
(4)where
Estimate the distance between attractor point pairs, taking Euclidean distance as the unit of measurement [29].
Evaluate the correlation integral
(5)where
(6)where ||V(i) − V(j)|| represents the Euclidean distance between two points.
When
Then, the CD is defined as formula (8):
When
3 Experimental analysis
In this work, the trampoline exercise is chosen as a research example. We used motion capture technology, namely, VICON8, to collect the trampoline instance data of the national team’s main athletes, covering all the prescribed and optional trampoline movements, and established a relatively complete trampoline standard action database [31]. In the motion database, human motion is represented by a time-varying function
Thus, in the 3D motion database, 3D human motion can be expressed as (9):
where P(t) ∈ R
3 and q
1(t) ∈ S
3, respectively, represent the position and (S
2 is the unit quaternion space) of root, and q
1(t) ∈ S
2 represents the orientation information of each joint center, and
We use contour-based method to reconstruct 3D human posture. First, we use motion segmentation method to extract 2D contour information of human body from video image. A general parameterized virtual human model is used to customize the human model according to the human in the video [34]. Then, the corresponding camera view information is extracted from the motion video, and the personalized human body model is used to conduct behavior driving and 2D projection on the motion data in the 3D motion database under the display view, so as to obtain the 2D human profile library. Finally, contour matching was performed in 2D moving contour database according to the contour similarity criterion to find the contour data with the highest similarity with the video contour to be reconstructed. The 3D attitude information corresponding to the contour is the preliminary reconstruction result. This is the basic idea of human posture reconstruction based on video in this article [35]. The processing process of human posture reconstruction is shown in Figure 3.
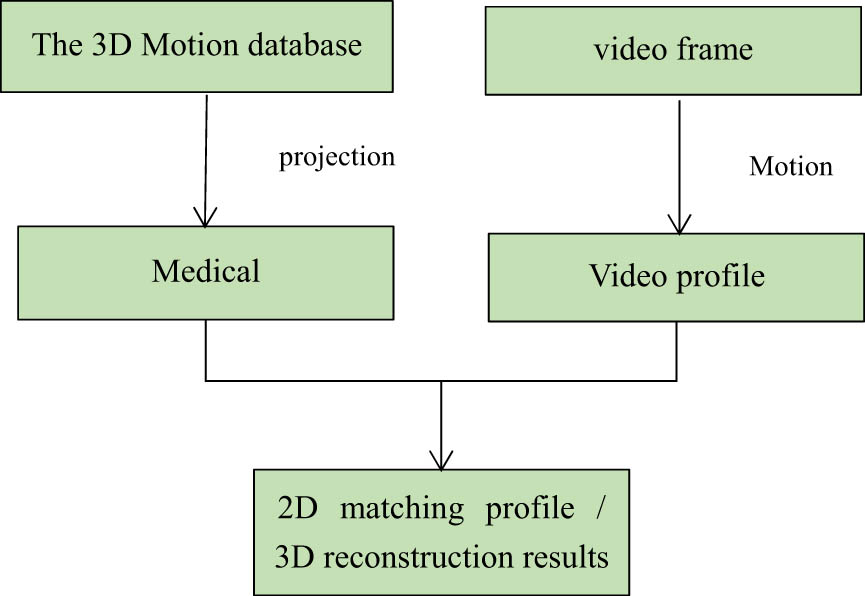
Basic flow chart of human posture reconstruction.
In order to further improve the accuracy and calculation efficiency of attitude reconstruction and achieve real-time calculation effect, we use the Earth-Mover’s distance (EMD) [PWR89] method to optimize the shape matching method. Meanwhile, for the second nearest neighbor retrieval problem, we use locality-sensitive hashing (LSH) to index the database. It has been proved by practice that the precision and processing efficiency of the reconstruction results have been improved greatly after this series of optimization. Since motion capture data can be collected at a frequency of 120 frames per second, the 3D pose library containing all trampoline motion data is large. In order to ensure the efficiency of reconstruction, it is necessary to cluster the data in the 3D attitude library [36]. At the same time, there is an important characteristic of the air movement type like trampoline, that is, although the height of the center of gravity of the human body is different in many stances, the stances are similar, and such data account for a considerable proportion. We omit the height position of the center of gravity of the attitude, and do c-means clustering on the data, and those data with approximate attitude belong to the same category. In our application, the pre-set initial classification is
As can be seen from Table 1, during the reconstruction phase, the total time taken to reconstruct 2,000 frames of data was about 811 s. The average time of single frame processing was 0.415 s. Even with the time of the entire pre-processing phase, the average time of the single frame processing is about 1.60 s. Compared with the Hu moment and AMIs method in the previous section, the computational efficiency is greatly improved.
Statistical table of attitude reconstruction processing time
| 2D profile library generation | Shape context & PCA | Embedding | LSH | |
|---|---|---|---|---|
| Top processing phase | ∼510 | ∼1,050 | ∼150 | ∼580 |
| Refactoring stage | ∼170 | ∼360 | ∼60 | ∼230 |
Human posture reconstruction based on video is a key step in the overall technical framework of this article. In order to further improve the accuracy and computational efficiency of pose reconstruction, in this chapter, we improve and implement a human pose reconstruction method based on EMD.
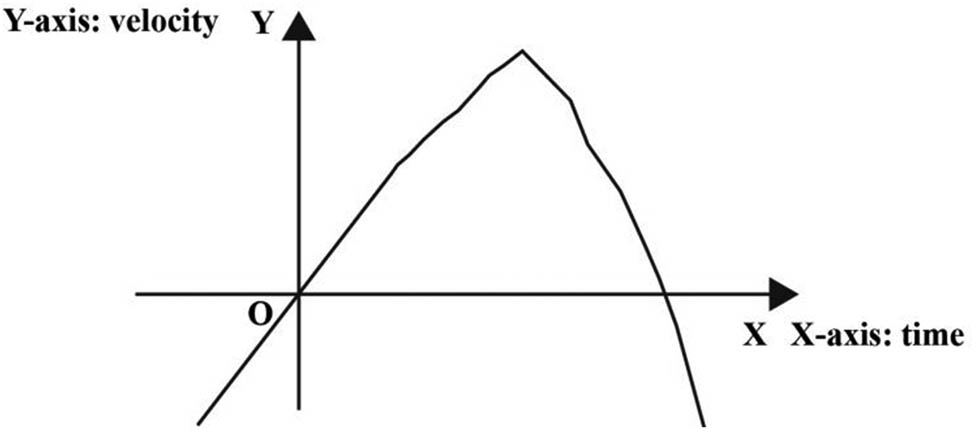
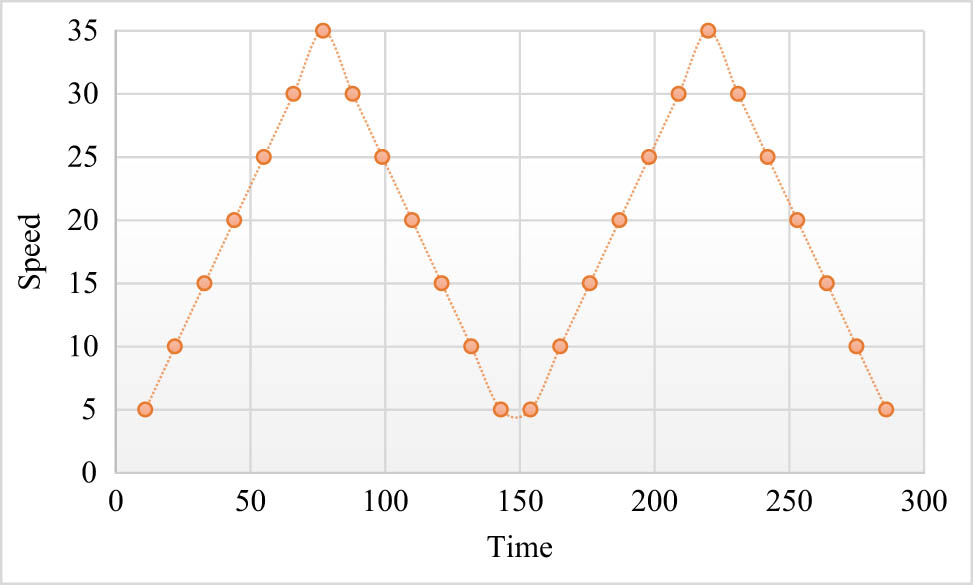
In order to verify the motion correlation of the reconstructed motion, we extracted the Y-component (height) and the velocity component of the root position of each attitude in the above reconstructed 3D motion sequence to verify the continuity of the reconstructed motion (Figure 4). It can be seen that the root position and velocity description curves of the reconstructed results have good smooth connectivity, indicating the good motion correlation characteristics of the reconstructed results [37]. Among them, the piecework discontinuity between the describing curves is caused by the fact that we only reconstructed the attitude data of the vacating part, but omitted the sequence of the contact between the person and the trampoline.
Motion correlation of root in motion reconstruction results.
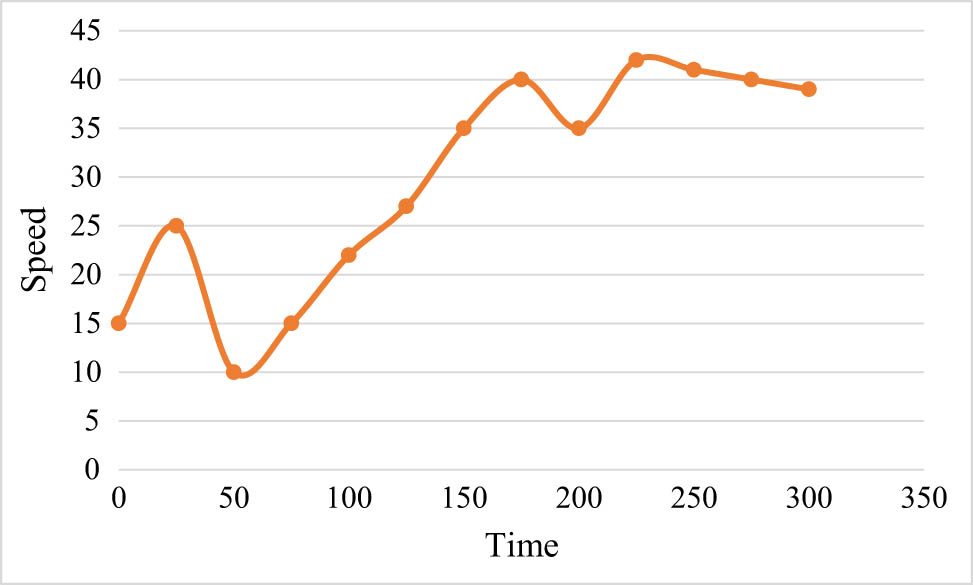
We use software Posers to generate the composite video data sequence, and the motion reconstruction of these composite. We added noise processing of closed operation (expansion first, corrosion later) to the contour of the synthesized data, and carried out motion reconstruction of the data after noise processing [38]. For example, we reconstructed a noisy synthesized motion sequence with a length of 440 frames, as shown in Figure 5.
Comparison of Y velocity component of root position between reconstructed results and real data.
Also, the comparative analysis of traditional and proposed methodology is done as shown in Figure 6 in terms of accuracy and success rate.
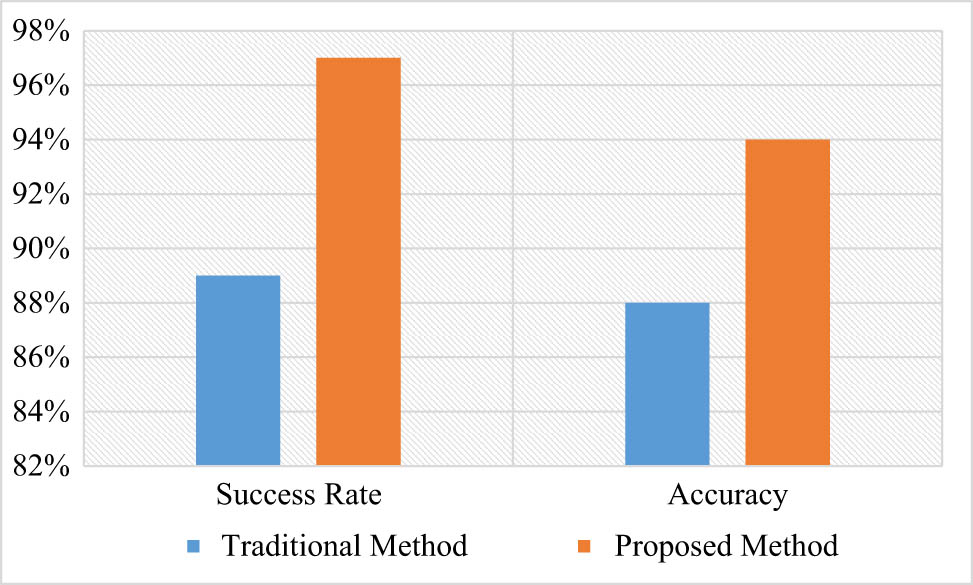
Comparative analysis of traditional and proposed methods.
Experiments show that after a series of optimization processing, the success rate of pose reconstruction is stable over 97% when the contour extraction quality is relatively ideal. The method is also robust to image noise, and the success rate of pose reconstruction can reach 94% when the video image has large noise. The execution efficiency is sub-linear, which can basically meet the requirements of real-time processing in video-based human posture reconstruction.
4 Conclusion
The theory and application of deformable models are reviewed. The theoretical research of deformable model is carried out from three aspects: geometric model, scale space, and algorithm realization, and its applications include image segmentation and surface reconstruction. A B-spline active contour model based on DP algorithm is proposed, and the B-spline deformable model is mainly studied for face contour extraction and medical tomography image contour extraction and surface reconstruction. The B-spline active contour model based on DP algorithm can combine the advantages of the two methods, which can quickly and stably converge to the target contour, and the obtained B-spline contour is beneficial to further surface reconstruction and other processing. The Lyapunov exponent, CD, and approximate entropy of the nonlinear dynamics algorithm were used to extract the features of eight types of motor imagination EEG signals, respectively. At present, the image potential energy of the model only contains the information of the object edge. The moving image contour feature pixels extracted by the method in this article are accurate and comprehensive. There are overlapping and missing problems. The calculation error rate of the curvature feature of the method in this article is kept at about 10%, and it has high extraction accuracy. It is revealed from experimentation that the proposed article has low error rate in the calculation of curvature features, effectively reduces the time for extracting contour features of moving images, and improves the accuracy of feature information extraction.
-
Funding information: The authors state no funding involved.
-
Author contributions: All authors have accepted responsibility for the entire content of this manuscript and approved its submission.
-
Conflict of interest: The authors state no conflict of interest.
References
[1] Hilarov VL. Identification of dynamic patterns of epileptic seizures in children by nonlinear mechanics methods. Tech Phys. 2020;65(3):485–91.10.1134/S106378422003007XSearch in Google Scholar
[2] Hayat FT. Darcy-Forchheimer flow with nonlinear mixed convection. Appl Math Mech (Engl Ed). 2020;41(11):89–100.10.1007/s10483-020-2680-8Search in Google Scholar
[3] Ebrahimi F, Hosseini S, Selvamani R. Thermo-electro-elastic nonlinear stability analysis of viscoelastic double-piezo nanoplates under magnetic field. Struct Eng Mech. 2020;73(5):565–84.Search in Google Scholar
[4] Tolmachev ST, Il’Chenko AV. The reciprocity principle for a nonlinear anisotropic medium without hysteresis: theory and practice of application. Electr Eng Electromech. 2020;2:40–5.10.20998/2074-272X.2020.2.06Search in Google Scholar
[5] Liu Z, Wei G, Wang Z. Geometrically nonlinear analysis of functionally graded materials based on reproducing kernel particle method. Int J Mech Mater Des. 2020;16:487–502.10.1007/s10999-019-09484-8Search in Google Scholar
[6] Anakhaev KN. Elliptic integrals in nonlinear problems of mechanics. Dokl Phys. 2020;65(4):142–6.10.1134/S1028335820040011Search in Google Scholar
[7] Gaur H, Srivastav A. A novel formulation of material nonlinear analysis in structural mechanics. Def Technol. 2021;17(1):36–49.10.1016/j.dt.2020.06.018Search in Google Scholar
[8] Rega G, Settimi V, Lenci S. Chaos in one-dimensional structural mechanics. Nonlinear Dyn. 2020;102(2):1–50.10.1007/s11071-020-05849-3Search in Google Scholar
[9] Nifa A, Bouali B. In the self-contact problem in nonlinear elasticity. Arch Ration Mech Anal. 2022;243(3):1433–48.10.1007/s00205-021-01752-2Search in Google Scholar
[10] Anakhaev KN. On the calculation of nonlinear buckling of a bar. Mech Solids. 2021;56(5):684–9.10.3103/S002565442105006XSearch in Google Scholar
[11] Rega G, Settimi V. Global dynamics perspective on macro- to nano-mechanics. Nonlinear Dyn. 2021;1:1–45.10.1007/s11071-020-06198-xSearch in Google Scholar
[12] Fischer J, Neukamm S. Optimal homogenization rates in stochastic homogenization of nonlinear uniformly elliptic equations and systems. Arch Ration Mech Anal. 2021;242(1):343–452.10.1007/s00205-021-01686-9Search in Google Scholar
[13] Eremeyev VA, Cazzani A, Dell’Isola F. On nonlinear dilatational strain gradient elasticity. Contin Mech Thermodyn. 2021;3:1–35.10.1007/s00161-021-00993-6Search in Google Scholar
[14] Karaaal T, Zgüven HN. Experimental quantification and validation of modal properties of geometrically nonlinear structures by using response-controlled stepped-sine testing. Exp Mech. 2021;62(2):199–211.10.1007/s11340-021-00784-9Search in Google Scholar
[15] Namnabat MS, Barzegar A, Barchiesi E, Javanbakht M. Nonlinear buckling analysis of double-layered graphene nanoribbons based on molecular mechanics. Carbon Lett. 2020;3:1–16.10.1007/s42823-020-00194-2Search in Google Scholar
[16] Georgievskii DV. Nonlinear tensor functions of two arguments and some “orthogonal effects” of the stress–strain state. Mech Solids. 2020;55(5):619–23.10.3103/S0025654420300020Search in Google Scholar
[17] Ruggeri T, Xiao Q, Zhao H. Nonlinear hyperbolic waves in relativistic gases of massive particles with Synge energy. Arch Ration Mech Anal. 2021;239(2):1061–109.10.1007/s00205-020-01590-8Search in Google Scholar
[18] Zhao M, Ma Z, Lu C, Zhang Q. Application of the homotopy analysis method to nonlinear characteristics of a piezoelectric semiconductor fiber. Appl Math Mech. 2021;42(5):665–76.10.1007/s10483-021-2726-5Search in Google Scholar
[19] Khoroshun AS. On global positional stabilization of a single-link manipulator with a nonlinear elastic joint*. Int Appl Mech. 2021;57(5):578–90.10.1007/s10778-021-01108-zSearch in Google Scholar
[20] Lipatov II, Fam VK. Nonlinear effects during perturbation propagation in strong supersonic interaction. J Appl Mech Tech Phys. 2020;61(3):436–8.10.1134/S0021894420030153Search in Google Scholar
[21] Dao NA, Díaz JI. Energy and large time estimates for nonlinear porous medium flow with nonlocal pressure in RN. Arch Ration Mech Anal. 2020;238(8):1–47.10.1007/s00205-020-01543-1Search in Google Scholar
[22] Cho H, Shin SJ, Kim H, Cho M. Enhanced model-order reduction approach via online adaptation for parametrized nonlinear structural problems. Comput Mech. 2020;65(2):331–53.10.1007/s00466-019-01771-7Search in Google Scholar
[23] Porubov AV, Belyaev AK, Polyanskiy VA. Nonlinear hybrid continuum–discrete dynamic model of influence of hydrogen concentration on strength of materials. Contin Mech Thermodyn. 2020;1:1–9.10.1007/s00161-020-00936-7Search in Google Scholar
[24] Zhang X, Rane K, Kakaravada I, Shabaz M. Research on vibration monitoring and fault diagnosis of rotating machinery based on Internet of Things technology. Nonlinear Eng. 2021;10(1):245–54.10.1515/nleng-2021-0019Search in Google Scholar
[25] Eftekhari M, Dashti-Rahmatabadi A, Mazidi A. Magnetic field effects on the nonlinear vibration of a rotor. Appl Math Mech(Engl Ed). 2020;41(2):101–24.10.1007/s10483-020-2567-6Search in Google Scholar
[26] Zubov LM. Universal solutions of nonlinear dislocation theory for elastic cylinder. Mech Solids. 2020;55(5):701–9.10.3103/S0025654420050167Search in Google Scholar
[27] Gholizadeh Pasha AH, Sadeghi A. Nonlinear vibrations of the immersed dagger-shaped atomic force microscope cantilever in different liquids studied by experimental and theoretical methods. J Appl Mech Tech Phys. 2020;61(4):652–60.10.1134/S0021894420040197Search in Google Scholar
[28] Huang R, Yan P, Yang X. Knowledge map visualization of technology hotspots and development trends in China’s textile manufacturing industry. IET Colla Intell Manuf. 2021;3(3):243–51.10.1049/cim2.12024Search in Google Scholar
[29] Bradha M, Balakrishnan N, Suvitha A, Arumanayagam T, Rekha M, Vivek P, et al. Experimental, computational analysis of Butein and Lanceoletin for natural dye-sensitized solar cells and stabilizing efficiency by IoT. Environ Dev Sustain. 2021;24:8807–22.10.1007/s10668-021-01810-5Search in Google Scholar
[30] Lomakin EV, Shchendrigina OP. Stresses and strains in a disk of physically nonlinear material with stress state dependent properties. Mech Solids. 2020;55(4):475–81.10.3103/S0025654420040081Search in Google Scholar
[31] Moradikia M, Samadi S, Hashempour HR, Cetin M. Video-SAR imaging of dynamic scenes using low-rank and sparse decomposition. IEEE Trans Comput Imaging. 2021;99:1.10.1109/TCI.2021.3069762Search in Google Scholar
[32] Liu X, Liu J, Chen J, Zhong F, Ma C. Study on treatment of printing and dyeing waste gas in the atmosphere with Ce-Mn/GF catalyst. Arab J Geosci. 2021;14(8):737.10.1007/s12517-021-07074-7Search in Google Scholar
[33] Zhang H, Zhao M, Liu L, Zhong H, Wang Y. Deep multimodel cascade method based on CNN and random forest for pharmaceutical particle detection. IEEE Trans Instrum Meas. 2020;99:1–7042.10.1109/TIM.2020.2973843Search in Google Scholar
[34] Veselov G, Tselykh A, Sharma A. Introduction to the Special Issue: Futuristic trends and emergence of technology in biomedical, nonlinear dynamics and control engineering. J Vibroeng. 2021;23(6):1315–7.10.21595/jve.2021.22226Search in Google Scholar
[35] Wu F, Zhu C, Xu J, Bhatt MW, Sharma A. Research on image text recognition based on canny edge detection algorithm and k-means algorithm. Int J Syst Assur Eng Manag. 2021;13:72–80.10.1007/s13198-021-01262-0Search in Google Scholar
[36] Jia Z, Sharma A. Review on engine vibration fault analysis based on data mining. J Vibroeng. 2021;23(6):1433–45.10.21595/jve.2021.21928Search in Google Scholar
[37] Chen Y, Zhang W, Dong L, Cengiz K, Sharma A. Study on vibration and noise influence for optimization of garden mower. Nonlinear Eng. 2021;10(1):428–35.10.1515/nleng-2021-0034Search in Google Scholar
[38] Kumar P, Kansal L, Gaba GS, Mounir M, Sharma A, Singh PK. Impact of peak to average power ratio reduction techniques on Generalized Frequency Division Multiplexing for 5th generation systems. Comput Electr Eng. 2021;95:107386.10.1016/j.compeleceng.2021.107386Search in Google Scholar
© 2022 Jucui Wang et al., published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Research Articles
- Fractal approach to the fluidity of a cement mortar
- Novel results on conformable Bessel functions
- The role of relaxation and retardation phenomenon of Oldroyd-B fluid flow through Stehfest’s and Tzou’s algorithms
- Damage identification of wind turbine blades based on dynamic characteristics
- Improving nonlinear behavior and tensile and compressive strengths of sustainable lightweight concrete using waste glass powder, nanosilica, and recycled polypropylene fiber
- Two-point nonlocal nonlinear fractional boundary value problem with Caputo derivative: Analysis and numerical solution
- Construction of optical solitons of Radhakrishnan–Kundu–Lakshmanan equation in birefringent fibers
- Dynamics and simulations of discretized Caputo-conformable fractional-order Lotka–Volterra models
- Research on facial expression recognition based on an improved fusion algorithm
- N-dimensional quintic B-spline functions for solving n-dimensional partial differential equations
- Solution of two-dimensional fractional diffusion equation by a novel hybrid D(TQ) method
- Investigation of three-dimensional hybrid nanofluid flow affected by nonuniform MHD over exponential stretching/shrinking plate
- Solution for a rotational pendulum system by the Rach–Adomian–Meyers decomposition method
- Study on the technical parameters model of the functional components of cone crushers
- Using Krasnoselskii's theorem to investigate the Cauchy and neutral fractional q-integro-differential equation via numerical technique
- Smear character recognition method of side-end power meter based on PCA image enhancement
- Significance of adding titanium dioxide nanoparticles to an existing distilled water conveying aluminum oxide and zinc oxide nanoparticles: Scrutinization of chemical reactive ternary-hybrid nanofluid due to bioconvection on a convectively heated surface
- An analytical approach for Shehu transform on fractional coupled 1D, 2D and 3D Burgers’ equations
- Exploration of the dynamics of hyperbolic tangent fluid through a tapered asymmetric porous channel
- Bond behavior of recycled coarse aggregate concrete with rebar after freeze–thaw cycles: Finite element nonlinear analysis
- Edge detection using nonlinear structure tensor
- Synchronizing a synchronverter to an unbalanced power grid using sequence component decomposition
- Distinguishability criteria of conformable hybrid linear systems
- A new computational investigation to the new exact solutions of (3 + 1)-dimensional WKdV equations via two novel procedures arising in shallow water magnetohydrodynamics
- A passive verses active exposure of mathematical smoking model: A role for optimal and dynamical control
- A new analytical method to simulate the mutual impact of space-time memory indices embedded in (1 + 2)-physical models
- Exploration of peristaltic pumping of Casson fluid flow through a porous peripheral layer in a channel
- Investigation of optimized ELM using Invasive Weed-optimization and Cuckoo-Search optimization
- Analytical analysis for non-homogeneous two-layer functionally graded material
- Investigation of critical load of structures using modified energy method in nonlinear-geometry solid mechanics problems
- Thermal and multi-boiling analysis of a rectangular porous fin: A spectral approach
- The path planning of collision avoidance for an unmanned ship navigating in waterways based on an artificial neural network
- Shear bond and compressive strength of clay stabilised with lime/cement jet grouting and deep mixing: A case of Norvik, Nynäshamn
- Communication
- Results for the heat transfer of a fin with exponential-law temperature-dependent thermal conductivity and power-law temperature-dependent heat transfer coefficients
- Special Issue: Recent trends and emergence of technology in nonlinear engineering and its applications - Part I
- Research on fault detection and identification methods of nonlinear dynamic process based on ICA
- Multi-objective optimization design of steel structure building energy consumption simulation based on genetic algorithm
- Study on modal parameter identification of engineering structures based on nonlinear characteristics
- On-line monitoring of steel ball stamping by mechatronics cold heading equipment based on PVDF polymer sensing material
- Vibration signal acquisition and computer simulation detection of mechanical equipment failure
- Development of a CPU-GPU heterogeneous platform based on a nonlinear parallel algorithm
- A GA-BP neural network for nonlinear time-series forecasting and its application in cigarette sales forecast
- Analysis of radiation effects of semiconductor devices based on numerical simulation Fermi–Dirac
- Design of motion-assisted training control system based on nonlinear mechanics
- Nonlinear discrete system model of tobacco supply chain information
- Performance degradation detection method of aeroengine fuel metering device
- Research on contour feature extraction method of multiple sports images based on nonlinear mechanics
- Design and implementation of Internet-of-Things software monitoring and early warning system based on nonlinear technology
- Application of nonlinear adaptive technology in GPS positioning trajectory of ship navigation
- Real-time control of laboratory information system based on nonlinear programming
- Software engineering defect detection and classification system based on artificial intelligence
- Vibration signal collection and analysis of mechanical equipment failure based on computer simulation detection
- Fractal analysis of retinal vasculature in relation with retinal diseases – an machine learning approach
- Application of programmable logic control in the nonlinear machine automation control using numerical control technology
- Application of nonlinear recursion equation in network security risk detection
- Study on mechanical maintenance method of ballasted track of high-speed railway based on nonlinear discrete element theory
- Optimal control and nonlinear numerical simulation analysis of tunnel rock deformation parameters
- Nonlinear reliability of urban rail transit network connectivity based on computer aided design and topology
- Optimization of target acquisition and sorting for object-finding multi-manipulator based on open MV vision
- Nonlinear numerical simulation of dynamic response of pile site and pile foundation under earthquake
- Research on stability of hydraulic system based on nonlinear PID control
- Design and simulation of vehicle vibration test based on virtual reality technology
- Nonlinear parameter optimization method for high-resolution monitoring of marine environment
- Mobile app for COVID-19 patient education – Development process using the analysis, design, development, implementation, and evaluation models
- Internet of Things-based smart vehicles design of bio-inspired algorithms using artificial intelligence charging system
- Construction vibration risk assessment of engineering projects based on nonlinear feature algorithm
- Application of third-order nonlinear optical materials in complex crystalline chemical reactions of borates
- Evaluation of LoRa nodes for long-range communication
- Secret information security system in computer network based on Bayesian classification and nonlinear algorithm
- Experimental and simulation research on the difference in motion technology levels based on nonlinear characteristics
- Research on computer 3D image encryption processing based on the nonlinear algorithm
- Outage probability for a multiuser NOMA-based network using energy harvesting relays
Articles in the same Issue
- Research Articles
- Fractal approach to the fluidity of a cement mortar
- Novel results on conformable Bessel functions
- The role of relaxation and retardation phenomenon of Oldroyd-B fluid flow through Stehfest’s and Tzou’s algorithms
- Damage identification of wind turbine blades based on dynamic characteristics
- Improving nonlinear behavior and tensile and compressive strengths of sustainable lightweight concrete using waste glass powder, nanosilica, and recycled polypropylene fiber
- Two-point nonlocal nonlinear fractional boundary value problem with Caputo derivative: Analysis and numerical solution
- Construction of optical solitons of Radhakrishnan–Kundu–Lakshmanan equation in birefringent fibers
- Dynamics and simulations of discretized Caputo-conformable fractional-order Lotka–Volterra models
- Research on facial expression recognition based on an improved fusion algorithm
- N-dimensional quintic B-spline functions for solving n-dimensional partial differential equations
- Solution of two-dimensional fractional diffusion equation by a novel hybrid D(TQ) method
- Investigation of three-dimensional hybrid nanofluid flow affected by nonuniform MHD over exponential stretching/shrinking plate
- Solution for a rotational pendulum system by the Rach–Adomian–Meyers decomposition method
- Study on the technical parameters model of the functional components of cone crushers
- Using Krasnoselskii's theorem to investigate the Cauchy and neutral fractional q-integro-differential equation via numerical technique
- Smear character recognition method of side-end power meter based on PCA image enhancement
- Significance of adding titanium dioxide nanoparticles to an existing distilled water conveying aluminum oxide and zinc oxide nanoparticles: Scrutinization of chemical reactive ternary-hybrid nanofluid due to bioconvection on a convectively heated surface
- An analytical approach for Shehu transform on fractional coupled 1D, 2D and 3D Burgers’ equations
- Exploration of the dynamics of hyperbolic tangent fluid through a tapered asymmetric porous channel
- Bond behavior of recycled coarse aggregate concrete with rebar after freeze–thaw cycles: Finite element nonlinear analysis
- Edge detection using nonlinear structure tensor
- Synchronizing a synchronverter to an unbalanced power grid using sequence component decomposition
- Distinguishability criteria of conformable hybrid linear systems
- A new computational investigation to the new exact solutions of (3 + 1)-dimensional WKdV equations via two novel procedures arising in shallow water magnetohydrodynamics
- A passive verses active exposure of mathematical smoking model: A role for optimal and dynamical control
- A new analytical method to simulate the mutual impact of space-time memory indices embedded in (1 + 2)-physical models
- Exploration of peristaltic pumping of Casson fluid flow through a porous peripheral layer in a channel
- Investigation of optimized ELM using Invasive Weed-optimization and Cuckoo-Search optimization
- Analytical analysis for non-homogeneous two-layer functionally graded material
- Investigation of critical load of structures using modified energy method in nonlinear-geometry solid mechanics problems
- Thermal and multi-boiling analysis of a rectangular porous fin: A spectral approach
- The path planning of collision avoidance for an unmanned ship navigating in waterways based on an artificial neural network
- Shear bond and compressive strength of clay stabilised with lime/cement jet grouting and deep mixing: A case of Norvik, Nynäshamn
- Communication
- Results for the heat transfer of a fin with exponential-law temperature-dependent thermal conductivity and power-law temperature-dependent heat transfer coefficients
- Special Issue: Recent trends and emergence of technology in nonlinear engineering and its applications - Part I
- Research on fault detection and identification methods of nonlinear dynamic process based on ICA
- Multi-objective optimization design of steel structure building energy consumption simulation based on genetic algorithm
- Study on modal parameter identification of engineering structures based on nonlinear characteristics
- On-line monitoring of steel ball stamping by mechatronics cold heading equipment based on PVDF polymer sensing material
- Vibration signal acquisition and computer simulation detection of mechanical equipment failure
- Development of a CPU-GPU heterogeneous platform based on a nonlinear parallel algorithm
- A GA-BP neural network for nonlinear time-series forecasting and its application in cigarette sales forecast
- Analysis of radiation effects of semiconductor devices based on numerical simulation Fermi–Dirac
- Design of motion-assisted training control system based on nonlinear mechanics
- Nonlinear discrete system model of tobacco supply chain information
- Performance degradation detection method of aeroengine fuel metering device
- Research on contour feature extraction method of multiple sports images based on nonlinear mechanics
- Design and implementation of Internet-of-Things software monitoring and early warning system based on nonlinear technology
- Application of nonlinear adaptive technology in GPS positioning trajectory of ship navigation
- Real-time control of laboratory information system based on nonlinear programming
- Software engineering defect detection and classification system based on artificial intelligence
- Vibration signal collection and analysis of mechanical equipment failure based on computer simulation detection
- Fractal analysis of retinal vasculature in relation with retinal diseases – an machine learning approach
- Application of programmable logic control in the nonlinear machine automation control using numerical control technology
- Application of nonlinear recursion equation in network security risk detection
- Study on mechanical maintenance method of ballasted track of high-speed railway based on nonlinear discrete element theory
- Optimal control and nonlinear numerical simulation analysis of tunnel rock deformation parameters
- Nonlinear reliability of urban rail transit network connectivity based on computer aided design and topology
- Optimization of target acquisition and sorting for object-finding multi-manipulator based on open MV vision
- Nonlinear numerical simulation of dynamic response of pile site and pile foundation under earthquake
- Research on stability of hydraulic system based on nonlinear PID control
- Design and simulation of vehicle vibration test based on virtual reality technology
- Nonlinear parameter optimization method for high-resolution monitoring of marine environment
- Mobile app for COVID-19 patient education – Development process using the analysis, design, development, implementation, and evaluation models
- Internet of Things-based smart vehicles design of bio-inspired algorithms using artificial intelligence charging system
- Construction vibration risk assessment of engineering projects based on nonlinear feature algorithm
- Application of third-order nonlinear optical materials in complex crystalline chemical reactions of borates
- Evaluation of LoRa nodes for long-range communication
- Secret information security system in computer network based on Bayesian classification and nonlinear algorithm
- Experimental and simulation research on the difference in motion technology levels based on nonlinear characteristics
- Research on computer 3D image encryption processing based on the nonlinear algorithm
- Outage probability for a multiuser NOMA-based network using energy harvesting relays