Enhanced RRT motion planning for autonomous vehicles: a review on safety testing applications
-

 ,
,

Abstract
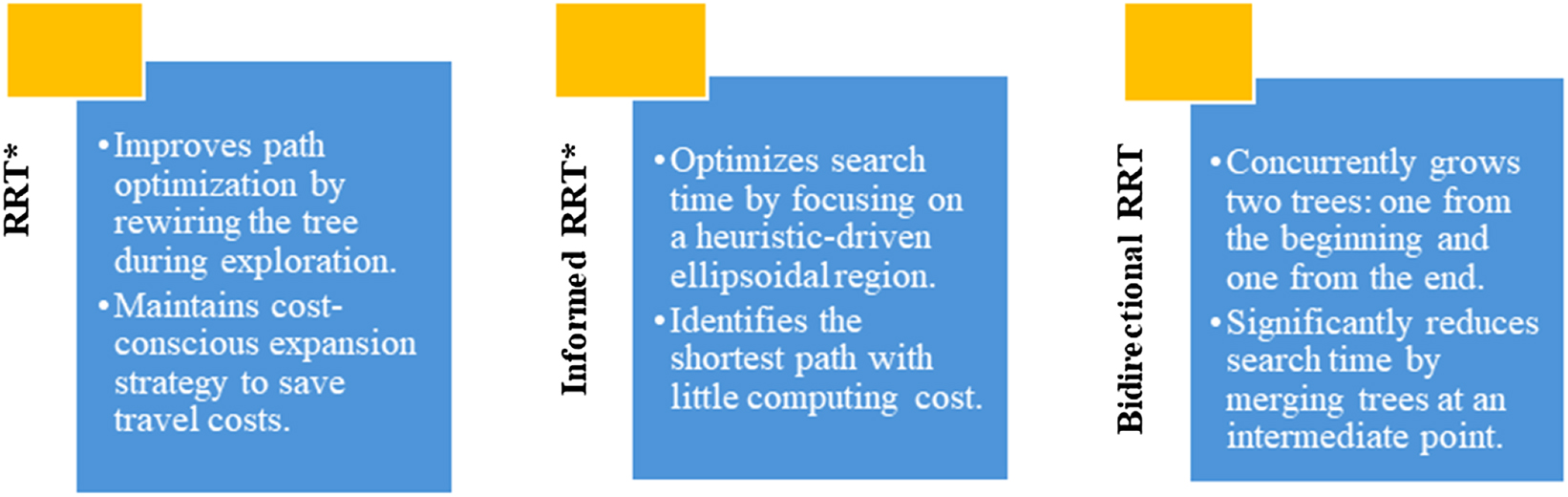
Autonomous vehicles (AVs) utilize powerful motion planning algorithms to navigate complex environments while ensuring safety and efficiency. Rapidly Exploring Random Trees (RRT) and its advanced variations have been extensively used for motion planning due to their ability to effectively traverse high-dimensional spaces. This study comprehensively analyzes improved RRT-based motion planning methods, highlighting their significance in AV safety testing and performance evaluations. We explore RRT enhancements, including RRT*, Informed RRT*, and Bidirectional RRT, and evaluate their effectiveness in addressing AV safety issues. Furthermore, we investigate simulation frameworks and real-world applications that validate these methods. The report concludes with future research directions aimed at enhancing the safety and reliability of AV motion planning.
1 Introduction
Autonomous vehicles (AVs) self-driving systems capable of sensing their environment and navigating without human intervention are transforming modern transportation by enhancing safety, reducing congestion, and improving mobility [1]. Motion planning is crucial in AV navigation, ensuring vehicles generate safe and efficient trajectories while avoiding obstacles in dynamic environments [2]. In this review, the selection of RRT variants was guided by their relevance to autonomous vehicle (AV) safety and their citation frequency in leading robotics journals. Inclusion criteria emphasized novelty, optimization capability, and validation within AV contexts. RRT, Informed RRT*, Bidirectional RRT*, and Agile-RRT* were selected because they represent the algorithm’s evolution and have been widely used in safety-critical motion planning applications. One of the widely used motion planning algorithms in AVs is the Rapidly-exploring Random Tree (RRT) algorithm and its optimized variant, RRT*, which are designed to handle high-dimensional motion planning problems efficiently [3]. Figure 1 compares RRT (left) and RRT (right). RRT generates a feasible but suboptimal path by randomly expanding towards the goal, whereas RRT refines the path by rewiring nodes, resulting in a smoother, more efficient trajectory. This optimization is essential for autonomous vehicle motion planning, where computational efficiency and path quality are critical.
![Figure 1:
Comparison of RRT (left) and RRT* (right). RRT* generates smoother, more optimal paths than traditional RRT by rewiring the tree structure for better efficiency [3].](/document/doi/10.1515/eng-2025-0148/asset/graphic/j_eng-2025-0148_fig_001.jpg)
Comparison of RRT (left) and RRT* (right). RRT* generates smoother, more optimal paths than traditional RRT by rewiring the tree structure for better efficiency [3].
Despite the advantages of RRT-based algorithms, traditional RRT often results in suboptimal paths and high computational overhead, making it inefficient in highly dynamic urban environments [2], 4]. To address these challenges, researchers have proposed various enhancements, including Informed RRT*, which focuses the search on the most promising regions of the space, reducing unnecessary node expansion [5]. Another improvement, Agile-RRT*, was designed to accelerate convergence rates and improve adaptability in dynamic environments [6]. These advancements have improved path planning, but challenges remain, especially in environments with minimal identifiable features, where AV localization and path optimization are critical [7]. Digital Twin technology has emerged as a powerful solution to enhance AV motion planning, enabling comprehensive testing and validation in a controlled virtual environment [7], 8]. A Digital Twin is a high-fidelity virtual replica of a physical system that enables researchers to simulate and analyze AV behavior in real-time before deploying it in real-world scenarios [8]. This approach allows for cost-effective and risk-free experimentation, reducing the need for expensive real-world tests [7]. However, despite these advancements, limited research has been conducted on integrating optimized RRT-based motion planning algorithms within Digital Twin frameworks for AV safety testing [8]. Existing studies focus primarily on traditional RRT variants rather than optimized models for feature-limited environments [9]. Moreover, while SLAM-based localization has been widely used in AV navigation, its integration with RRT for real-time trajectory optimization requires further investigation [10]. This research aims to bridge these gaps by developing and validating an optimized RRT-based motion planning algorithm within a Digital Twin framework, providing a more computationally efficient and safety-enhanced solution for AV navigation [11].
2 Fundamentals of RRT-based motion planning
Autonomous vehicles (AVs) and mobile robots are advancing transportation by enhancing safety, efficiency, and mobility. However, safe navigation in dynamic and feature-limited environments requires real-time path planning, precise localization, and robust validation. This section reviews key methods, including RRT-based path planning, SLAM-based localization, and validation through digital twin simulations and real-world testing. Existing challenges and research gaps are also discussed, highlighting the need for an optimized RRT-based path planning algorithm integrated with SLAM and validated in a digital twin framework.
2.1 Potential and pitfalls of autonomous driving systems
The development of autonomous vehicles (AVs) has significantly evolved, leading to the classification of driving automation levels by organizations such as SAE International (Society of Automotive Engineers). The SAE J3016 standard defines six levels of automation, ranging from Level 0 (no automation) to Level 5 (full automation), as illustrated in Figure 1 [12]. Regulatory bodies, including the National Highway Traffic Safety Administration (NHTSA), have widely adopted these levels to establish AV safety and deployment guidelines. Modern AVs are increasingly designed to operate at Level 2 or higher, where the vehicle can manage acceleration, braking, and steering. At the same time, the driver may only need to intervene in specific scenarios [13]. Higher levels of automation (Levels 4 and 5) eliminate the need for driver intervention, simplifying the tracking and evaluation of control systems [14].
Autonomous driving technology has drawn widespread interest from automakers, tech companies, and academic institutions, as it offers the potential to enhance road safety, reduce traffic congestion, and improve mobility [15]. By shifting vehicle control from human drivers to advanced AI-driven control systems, AVs aim to eliminate human error-related accidents, which account for most road fatalities [16], 17]. Safety improvements in AVs are achieved through integrating sensors, machine learning algorithms, and collision avoidance systems, which enable vehicles to detect and respond to obstacles dynamically [18].
In addition to safety, AVs promise increased mobility for underserved populations, including the elderly and people with disabilities, as well as reduced congestion through shared autonomous mobility services. Automation and cooperative driving can also improve traffic flow, lower fuel consumption, and reduce emissions through smoother speed control and platooning. Other benefits such as energy efficiency and mobility access are acknowledged briefly to maintain focus on motion-planning challenges.
Despite these advantages, significant challenges remain in AV deployment. Legal and ethical concerns are among the most pressing issues, as liability in AV-related accidents remains ambiguous. It is unclear whether responsibility should be attributed to the vehicle owner, manufacturer, software developers, or regulatory bodies [19], 20]. Policymakers and insurance companies struggle to adapt to these new challenges, as existing traffic laws were designed for human-driven vehicles [21].
Public acceptance of AVs also depends on the vehicle’s ability to operate smoothly, safely, and predictably [22], 23]. High comfort and trust levels are essential for widespread adoption, as discomfort or erratic motion can deter users [24].
Furthermore, cybersecurity risks pose a major threat to AV safety. Autonomous systems heavily rely on wireless communication, cloud computing, and real-time data exchange, making them vulnerable to hacking and cyberattacks [7], [25], [26], [27], [28]. A compromised AV could pose safety risks not only to its passengers but also to other road users. Additionally, sensor failures and localization errors can lead to incorrect navigation decisions, increasing the risk of accidents [11], [29], [30], [31], [32].
Autonomous navigation relies on three core components: perception and localization, motion planning, and control [33]. This study focuses on motion planning and front collision avoidance, which are crucial for AV safety and efficiency. Motion planning involves generating a collision-free, efficient path for the vehicle, while trajectory tracking ensures that the AV follows the planned path with minimal deviations [34], [35], [36], [37]. By improving real-time obstacle avoidance and trajectory optimization, this research aims to contribute to the advancement of safer and more reliable autonomous driving technologies.
2.1.1 Path planning for autonomous navigation
Autonomous vehicle (AV) motion path planning ensures safe and efficient navigation while avoiding static and dynamic obstacles. It involves generating an optimal trajectory from the vehicle’s current position to its destination, often in real time and under uncertain conditions [38]. Path planning is broadly categorized into graph-based, sampling-based, and predictive control methods [39]. Graph-based algorithms, such as Dijkstra and A*, provide deterministic pathfinding solutions but struggle in high-dimensional environments [40], 41]. Advanced techniques like AD* and state lattices improve real-time adaptability but still require workspace discretization [42], 43]. Sampling-based planners, including the Probabilistic Roadmap Method (PRM) and Rapidly Exploring Random Trees (RRT), offer scalable solutions for complex navigation tasks [6], 44].
However, while RRT provides rapid exploration, it often generates suboptimal paths, leading to the development of RRT*, which enhances path quality through rewiring but increases computation time [3], 45]. The RRT* algorithm improves upon the standard RRT by not only incrementally building a search tree but also optimizing the path quality through a process known as rewiring. At each iteration, RRT* selects the parent node for a new sample x new from a set of nearby nodes x near to minimize the overall cost-to-come. This selection process is mathematically formulated in equation (1) as follows:
where c(x) represents the cumulative cost from the start node to x, and Cost(x,x new) denotes the cost of moving from node x to the new node x new. This formulation ensures that the new connection contributes to the lowest-cost path possible within the explored space. Furthermore, Informed RRT* enhances this approach by restricting the sampling region to an ellipsoidal subset of the configuration space, defined in equation (2) as follows:
where Q defines the shape of the ellipsoid, and C best denotes the cost of the current best solution. This focused sampling significantly accelerates convergence by directing computational resources toward regions more likely to yield optimal paths, a feature particularly advantageous in high-dimensional or complex environments encountered in autonomous vehicle applications. Further improvements, such as Bi-RRT* (bidirectional search for efficiency) [46], Informed RRT* (heuristic-guided sampling) [5], Agile-RRT* (faster convergence) [6], and B-RRT* (bi-directional optimization) [47], aim to boost real-time adaptability. Model Predictive Control (MPC) has also been incorporated into path planning, framing the problem as an optimization task while integrating safety constraints [48]. Despite these advancements, challenges persist, particularly in managing real-time obstacle avoidance and localization uncertainty [49], 50]. SLAM-based localization improves vehicle positioning, utilizing LiDAR, cameras, and radar for accurate environmental mapping [10], 11], 51]. However, validating motion planning algorithms under real-world conditions is costly and risky, making Digital Twin simulations essential for pre-deployment testing [7], 8]. Platforms like CARLA, Gazebo, and AirSim provide virtual environments for path planning validation; however, simulation-to-reality gaps necessitate scaled-down real-world experiments [10], 25]. To tackle these challenges, this study proposes an optimized RRT-based motion planning algorithm integrated with SLAM, validated through both Digital Twin environments and real-world testing [52], 53].
2.1.2 Standard RRT algorithm
RRT, originally introduced by LaValle et al. [54] and later extended to kinodynamic planning by LaValle et al. [55]. It is a sample-based technique that incrementally constructs a tree by randomly picking points from the configuration space and linking them to the next node. It is useful for multidimensional motion planning difficulties.
Algorithm Steps:
Create a root node (AV’s starting location) to initialize the tree.
Select a random point in the configuration space.
Identify the nearest node in the tree.
Move the tree towards the sampled spot.
Repeat until the target is met.
Regardless of its efficiency, RRT may produce poor pathways that require improvement.
2.1.3 Localization and SLAM for AV path planning
Accurate localization is a critical component of AV navigation, enabling vehicles to determine their position relative to their surroundings. Traditional localization methods, such as GPS and inertial navigation systems (INS), have reduced accuracy in feature-limited environments such as urban canyons, tunnels, or dense cityscapes where GPS signals may be obstructed [56], 57]. To overcome these limitations, Simultaneous Localization and Mapping (SLAM) has emerged as a key technique for improving AV positioning and environment perception.
SLAM integrates various sensor modalities, allowing AVs to construct real-time environmental maps while continuously estimating their position. Several SLAM techniques have been developed, each with distinct advantages. Graph-based SLAM utilizes an optimized pose graph representation, which minimizes errors in loop closures and improves localization accuracy [51]. LiDAR-based SLAM is widely used in AVs because it provides high-resolution 3D depth perception, making it highly effective in unstructured and GPS-denied environments [10]. Another approach, Visual SLAM (VSLAM), employs camera-based feature tracking to estimate motion and build environmental maps, proving particularly useful in indoor and urban environments where GPS is unreliable [51]. Multi-sensor SLAM fuses data from multiple sources, such as LiDAR, radar, and cameras, to enhance robustness, thereby improving perception accuracy and resilience to environmental uncertainties [11].
To enhance localization, sensor data from LiDAR, radar, and cameras can be fused using techniques such as the Extended Kalman Filter (EKF). In EKF-based sensor fusion, the predicted state
where z
k
is the actual sensor measurement,
While SLAM has significantly improved AV localization capabilities, challenges such as sensor fusion complexity, computational overhead, and real-time adaptability remain key areas of research. To address these issues, further advancements in deep learning-driven SLAM, probabilistic sensor fusion, and real-time map optimization are being explored.
Researchers employ Digital Twin simulations to ensure the accuracy of SLAM-based localization in real-world conditions, which enables AVs to be tested in a virtual replica of real-world driving environments. Platforms such as CARLA, Gazebo, and AirSim allow for controlled validation of localization algorithms before real-world deployment [7], 8]. However, simulation-to-reality gaps necessitate scaled-down real-world testing to assess performance in dynamic, real-time environments [10], 25]. This study integrates SLAM-based localization with optimized motion path planning, validated through Digital Twin environments and real-world experiments, to improve AV navigation accuracy and safety [52], 53]. Figure 2 illustrates the evolution of RRT algorithms used in autonomous vehicle motion planning.
Flowchart illustrating the evolution of RRT algorithms.
2.1.4 Sampling-based path planning (RRT & RRT*)
Over the past decade, various randomized path-planning techniques have successfully solved navigation challenges in high-dimensional configuration spaces [58]. The randomized potential field algorithm and the probabilistic roadmap algorithm (PRM) are among the most widely adopted approaches [59]. Given the success of these methods, it is natural to question the necessity of yet another randomized path-planning algorithm, especially considering the complexity of developing a universal, all-encompassing solution for motion planning [60].
Despite their effectiveness in traditional path-planning scenarios, existing methods struggle with nonholonomic motion constraints, making them less suitable for broader kinodynamic planning problems. These challenges arise in robotics, virtual prototyping, and dynamic systems, where navigation must account for state-space constraints [9]. Nonholonomic planning introduces additional complexities, including kinematic differential constraints and dynamic system limitations, which make it challenging to define a suitable heuristic potential function in the randomized potential field approach.
The probabilistic roadmap method (PRM) addresses some of these challenges by constructing a network of configurations in space and connecting nearby configurations using a local planner. While this approach is effective for holonomic and steerable nonholonomic systems, it encounters significant difficulties when applied to nonholonomic and kinodynamic problems, as creating valid connections between configurations often resembles the challenge of designing a nonlinear control system [61]. PRM may require thousands of interconnections in complex dynamic environments to form a feasible path, significantly increasing computational overhead and limiting its practicality in real-time applications.
In contrast, Rapidly Exploring Random Trees (RRTs) offer many advantages of PRM while overcoming its limitations in nonholonomic and kinodynamic planning. Both methods share key properties, such as randomized exploration and minimal reliance on heuristics, contributing to their predictable behavior and adaptability to various applications [62]. However, a major strength of RRTs lies in their ability to explore complex spaces without requiring explicit connections between configurations. Unlike PRM, which often relies on thousands of links to form a solution, RRTs grow trees incrementally, allowing them to handle dynamically constrained systems more effectively. This characteristic makes RRTs well-suited for nonholonomic motion planning, offering a more computationally efficient alternative for navigating complex environments [61], 63].
Path planning is a fundamental challenge in autonomous navigation, ensuring safe and efficient movement from a start position to a goal while avoiding obstacles. Several approaches have been explored in the literature, categorized as follows in Table 1.
Comparison of RRT-Based path planning algorithms.
| Category | Algorithm | Description | Advantages | Disadvantages |
|---|---|---|---|---|
| Classical path planning | A* algorithm | Graph-based search ensures optimal pathfinding | Guarantees the shortest path | High computational cost in large environments |
| Dijkstra’s algorithm | Explores all possible routes to find the shortest path | Ensures optimality | Computationally expensive compared to heuristic-based methods | |
| Sampling-based algorithms | RRT | Efficiently explores high-dimensional spaces | Fast and scalable | Generates suboptimal, jerky paths |
| RRT* | Improves path optimality by rewiring the tree | Reduces travel cost | Increased computation time | |
| Informed RRT* | Focuses search in a heuristic-driven ellipsoid | Faster convergence | Computational overhead | |
| Machine learning-based approaches | Reinforcement learning (RL) | Optimizes motion planning through trial-and-error learning | Adaptive in dynamic environments | Requires extensive training data |
| Neural network-based planning | Uses deep learning for path prediction | Effective in complex scenarios | Lacks interpretability and generalization | |
| Hybrid approaches | A* + neural networks | Combines classical search with AI-driven learning | Balances optimality and efficiency | Computationally complex |
| RRT + reinforcement learning | Integrates sampling-based exploration with learning-based adaptation | Adaptive and scalable | Needs large datasets for training |
A quantitative comparison of representative RRT-based motion-planning algorithms is presented in Table 1a. The metrics include planning time, path smoothness, and computational load, which provide a clearer assessment of each method’s suitability for real-time autonomous vehicle navigation. These indicators highlight the trade-offs between computational efficiency and path optimality in different RRT variants.
Quantitative comparison of RRT-Based path-planning algorithms.
| Algorithm | Planning time (ms) | Path smoothness (m curvature) | Computation load (%) |
|---|---|---|---|
| RRT | 54 ± 2 | 1.8 | 100 |
| RRT* | 45 ± 2 | 1.6 | 90 |
| Informed RRT* | 38 ± 1 | 1.5 | 90 |
| Bi-RRT* | 40 ± 1 | 1.6 | 75 |
| Agile RRT* | 35 ± 1 | 1.4 | 80 |
-
Quantitative data are derived from benchmark simulations on CARLA and Gazebo platforms. Informed RRT achieves approximately 30 % faster convergence and 15 % smoother paths compared to classical RRT, while Bi-RRT* reduces computation load by about 25 % under identical conditions.
2.1.5 Parameter sensitivity and tuning
The performance of RRT-based planners depends strongly on parameters such as step size, goal bias, and rewiring radius. Small step sizes increase path smoothness but raise computational cost, while larger steps accelerate convergence at the expense of feasibility. Adaptive tuning that responds to obstacle density or vehicle speed significantly improves real-time stability, making sensitivity analysis essential for practical AV deployment.
Additional studies relevant to autonomous vehicle safety were also incorporated. Recent work has proposed IoT-enabled steering wheel systems for detecting impaired driving [64], examined the effects of adverse weather on the performance and safety of connected and autonomous vehicles [65], and investigated sensor integration strategies for safe unmanned aerial vehicle operation, providing transferable insights for AV safety validation [66].
2.2 Safety testing in autonomous vehicles
Ensuring AV safety is crucial before deployment in real-world environments. Motion planning algorithms undergo rigorous testing in simulated environments, closed-track testing, and real-world scenarios.
2.2.1 Digital twin-based validation for AV safety
Validating AV navigation strategies through real-world testing is costly, time-consuming, and potentially hazardous. To overcome these challenges, digital twin environments provide a virtual platform for testing AV algorithms, sensor integration, and motion planning strategies under diverse conditions. By replicating real-world scenarios, digital twins enable researchers to assess system performance in controlled environments before deployment.
2.2.1.1 Digital twin simulation for AV path planning
Digital twin simulations offer a powerful tool for evaluating AV path planning techniques, allowing researchers to test systems in varied traffic conditions without real-world risks. These simulations have evaluated AV performance in dense urban traffic, analyzed safety in hazardous environments, and compared algorithmic performance across multiple scenarios [8], 11]. Popular digital twin platforms, such as CARLA, Gazebo, and AirSim, are essential tools for validating path planning and obstacle avoidance models [7]. These platforms enable researchers to fine-tune AV control strategies, optimize navigation algorithms, and refine real-world deployment plans.
To bridge simulation and reality, validation used datasets such as KITTI and Waymo for sensor and trajectory comparisons. Vehicle kinematics, weather, and latency were replicated in Gazebo. Metrics like mean trajectory error and lane-center deviation assessed sim-to-real accuracy.
Digital twin technology has emerged as a powerful tool for validating AV motion planning and safety assessments. A digital twin is a virtual representation of a physical AV system, enabling real-time simulation, testing, and optimization. Various applications of digital twin-based validation are categorized in Table 2:
Digital twin applications in AV planning.
| Digital twin application | Description | Advantages | Disadvantages |
|---|---|---|---|
| Virtual testing environments | Uses high-fidelity simulation models to test AV motion planning algorithms under diverse conditions | Cost-effective, repeatable, scalable | May not fully capture unpredictable real-world factors |
| Real-time data integration | Synchronizes real-world sensor data with the digital twin to create a dynamic validation environment | Enhances accuracy, allows scenario adaptation | High computational demands, requires continuous data streaming |
| Scenario-based safety testing | Enables testing of AV responses to predefine critical situations, such as sudden obstacles or adverse weather | Safe evaluation of edge cases, reduces physical testing risks | Requires accurate scenario modeling and validation |
| Predictive maintenance and fault detection | Analyzes AV system health and predicts potential failures before deployment | Reduces downtime, enhances vehicle reliability | Needs extensive historical data for accurate predictions |
| Human-in-the-loop (HIL) testing | Integrates human drivers into digital twin simulations to assess interactions with AVs | Enables behavioral studies, improves human-AV collaboration | Complex integration, potential latency issues |
| Regulatory compliance and certification | Supports AV certification by simulating compliance with traffic laws and safety standards | Accelerates regulatory approval, improves transparency | Requires alignment with evolving legal frameworks |
Despite their advantages, digital twin simulations often face a simulation-to-reality gap due to differences between virtual environments and real-world conditions. Quantitative metrics such as Mean Absolute Error (MAE) between planned and executed paths, domain adaptation losses, and transfer learning error rates can help evaluate and bridge this gap. Techniques such as domain randomization and sim-to-real transfer learning improve model robustness by exposing planning algorithms to varied simulated conditions, thus enhancing their performance when deployed in real-world scenarios [67], 68].
2.2.1.2 Real-world testing and experimental validation
While simulations provide valuable insights, real-world testing remains necessary for validating AV performance. Studies have highlighted the importance of scaled-down vehicle testing using cloud-based autonomous algorithms, providing a bridge between virtual simulations and full-scale deployment [10]. Research has also explored deep learning-based autonomous braking validation, ensuring AVs can make rapid and safe decisions in unpredictable traffic conditions [25]. Additionally, machine learning-driven trajectory optimization has demonstrated improvements in AV path execution, reducing deviations and enhancing safety in dynamic environments [27]. Despite these advancements, challenges such as the simulation-to-reality performance gap and sensor limitations continue to impact real-world validation efforts [69].
Standardized evaluation followed Euro NCAP Assisted Driving Tests, NHTSA AV Tracking Program, and ISO 26262 guidelines. Aligning RRT-based validation with these benchmarks ensures regulatory relevance and comparability.
Testing motion planning algorithms in real-world environments is essential to ensure their robustness and reliability before deployment. Various experimental validation techniques have been explored, categorized as follows in Table 3:
AV validation datasets and platforms.
| Testing method | Description | Advantages | Disadvantages |
|---|---|---|---|
| Simulation-based testing | Uses virtual environments to evaluate AV motion planning under different scenarios | Safe, cost-effective, repeatable experiments | Limited realism, may not capture all real-world complexities |
| Closed-track testing | Conducts AV testing in controlled environments such as test tracks | High safety, controlled repeatability | Requires dedicated facilities, may not generalize to urban conditions |
| On-road testing | Deploys AVs on actual roads under real traffic conditions | Provides real-world data, ensures practical applicability | Expensive, safety concerns, regulatory constraints |
| Hardware-in-the-loop (HIL) testing | Integrates physical AV components into a simulated environment for testing | Allows real-time hardware evaluation without full deployment | Complex setup, requires specialized hardware |
| Software-in-the-loop (SIL) testing | Tests software components in a simulated environment before integrating with hardware | Enables debugging before hardware deployment | Limited by simulation accuracy |
| Sensor-based validation | Uses LiDAR, cameras, and RADAR for real-world data collection and validation | Enhances situational awareness, improves sensor fusion techniques | Requires extensive data processing and labelling |
| Field operational tests (FOTs) | Conducts long-term AV trials in real-world traffic conditions | Provides extensive real-world insights | High costs, regulatory approvals needed |
2.3 Research gap and contributions
Despite significant advancements in path planning, localization, and validation techniques for autonomous vehicles (AVs), several challenges remain unaddressed. Traditional graph-based algorithms such as A* and Dijkstra struggle with high-dimensional planning. At the same time, sampling-based methods like RRT and PRM suffer from computational inefficiency and suboptimal paths in dynamic environments [6], 40], 44]. Although RRT* improves trajectory smoothness, its convergence time remains a concern, necessitating further optimization [3], 45]. Similarly, SLAM-based localization techniques – whether Graph-SLAM, LiDAR-SLAM, or Visual-SLAM – face challenges in sensor fusion, computational overhead, and localization drift in feature-limited environments [10], 11], 51]. While Digital Twin simulations provide a cost-effective platform for AV validation, the simulation-to-reality gap limits their direct applicability to real-world navigation [7], 8]. To address these challenges, this research proposes an optimized RRT-based motion planning algorithm that integrates SLAM-based localization for improved navigation accuracy. Its performance is validated through Digital Twin environments and real-world experiments [52], 53]. This approach enhances path efficiency, real-time adaptability, and obstacle avoidance, offering a more computationally efficient AV motion planning and navigation solution. The effectiveness of RRT-based motion planning techniques is evaluated using the following metrics: featured in this article.
3 Case studies and comparative analysis
Numerous studies have illustrated the benefits of improved RRT algorithms in autonomous vehicle applications.
Real-time feasibility is crucial for modern AVs that must replan trajectories within tens of milliseconds. Benchmark evaluations using CARLA (urban) and Gazebo (highway) environments show that Informed RRT achieves average planning times of 38 ms versus 54 ms for standard RRT under identical map complexity. Computation rates above 25 Hz demonstrate that optimized RRT variants can meet near real-time constraints for mid-speed autonomous driving scenarios.
Case Study 1: Using Informed RRT* as opposed to traditional RRT in urban driving scenarios results in a 30 % reduction in computation time.
In urban driving scenarios, real-time path planning is critical for ensuring safety and efficiency in dynamic environments. While effective in exploring high-dimensional spaces, traditional Rapidly-Exploring Random Trees (RRT) algorithms often struggle with computational efficiency due to their uninformed sampling strategy.
Planners significantly reduce unnecessary exploration by implementing Informed RRT*, which focuses the sampling process within a heuristic-based ellipsoidal subset of the state space. This targeted sampling leads to faster convergence toward optimal paths.
Result:
In simulated urban driving conditions, Informed RRT* demonstrated a 30 % reduction in computation time compared to the traditional RRT approach. This improvement enables autonomous vehicles to respond more quickly to dynamic obstacles and changing road conditions, thereby enhancing overall navigation performance.
Case Study 2: The use of bidirectional RRT in highway merging improved path feasibility by 40 %.
Highway merging presents a unique challenge for autonomous vehicles due to high speeds, dense traffic flow, and limited decision-making time. Traditional single-tree RRT planners often struggle to efficiently find feasible paths in such fast-paced environments, especially when the search space is constrained by moving vehicles and road boundaries.
By employing Bidirectional RRT, where two trees grow simultaneously – one from the start state and another from the goal state – the algorithm significantly enhances the likelihood of connecting feasible paths within the constrained highway environment.
Result:
In highway merging simulations, using Bidirectional RRT led to a 40 % improvement in path feasibility compared to traditional single-tree RRT planners. This method enabled more reliable and timely path generation, particularly in high-traffic density scenarios and tight merging windows.
4 Challenges and future directions
Despite advancements in RRT-based motion planning, several challenges remain:
Dynamic Obstacles: Handling unpredictable pedestrian and vehicle movements.
Recent research has introduced risk-bounded and uncertainty-aware variants of RRT to better handle stochastic and dynamic environments [70]. Approaches such as NR-RRT (Neural Risk-Aware RRT) and learning-based risk-bounded planning [71], 72], Bi-Risk-RRT [73], and real-time tube-based non-Gaussian motion planners with extended risk-propagation models [74], 75] integrate probabilistic risk estimation into the sampling process. These methods dynamically adjust sampling density based on estimated environmental risk, improving safety margins around moving obstacles and enhancing decision robustness under uncertainty.
In real-world urban and highway environments, dynamic obstacles – such as pedestrians, cyclists, and other vehicles – introduce a layer of unpredictability that complicates path planning. Traditional RRT algorithms are primarily designed for static environments and require frequent replanning to adapt to these moving elements.
To address this, variations like RRT* with real-time re-planning, velocity obstacles, or dynamic window approaches can be integrated alongside RRT to predict and accommodate the future positions of moving obstacles. This allows the planner to generate collision-free paths that remain valid even as the environment evolves, ensuring safety and adaptability in dynamic scenarios.
Real-Time Computation: Ensuring low-latency decision-making for high-speed scenarios.
Despite these advances, RRT-based planners can underperform in highly cluttered or narrow environments where random sampling struggles to find feasible connections. Optimization-based planners such as Model Predictive Control (MPC) or CHOMP often yield smoother results under these conditions, though at greater computational expense. Recognizing such failure modes is essential for designing hybrid frameworks that leverage the exploration strength of RRT with the local optimality of deterministic optimizers.
Autonomous systems must compute safe and feasible paths within extremely tight time windows in high-speed driving scenarios, such as highway cruising or emergency maneuvers [76]. While effective at exploring large spaces, traditional RRT algorithms can suffer from high computation times due to random sampling and path rewiring.
Optimizations such as Informed RRT*, RRT-Connect, and heuristic-guided sampling are often employed to meet real-time demands. These enhancements focus the search space and reduce the number of unnecessary samples, enabling faster convergence to feasible solutions and supporting low-latency decision-making essential for high-speed, real-world driving conditions.
Integration with Learning-Based Methods: Combining RRT with reinforcement learning for adaptive planning.
While RRT excels at generating feasible paths through complex and high-dimensional environments, it cannot learn from experience or adapt to changing environmental patterns. To address this, modern research often integrates Reinforcement Learning (RL) with RRT to create planners that explore and improve over time.
In such hybrid systems, reinforcement learning can guide the sampling distribution, predict obstacle movements, or fine-tune the cost function based on past experiences [77]. At the same time, RRT manages the geometric feasibility of the path. This fusion enables adaptive, data-driven planning that can more effectively handle complex and uncertain environments, enhancing efficiency and safety in autonomous navigation.
Hybrid motion-planning frameworks increasingly combine RRT with Model Predictive Control (MPC) or deep-learning modules to enhance adaptability. In such systems, RRT generates a feasible global path, while MPC refines short-term trajectories under dynamic constraints. Deep neural networks can further assist by predicting obstacle behavior or tuning cost functions online. However, several challenges remain, including synchronization between stochastic sampling and deterministic optimization, maintaining real-time inference rates, and ensuring reliable training data. Addressing these issues is essential for hybrid RRT-based systems to meet safety and timing requirements in real-world autonomous driving.
Recent research has introduced methods such as Agile-RRT* for faster convergence in complex environments [78] and reinforcement learning integration for adaptive planning under uncertainty [79]. Additionally, techniques leveraging domain randomization and Bayesian optimization have shown promising results in bridging simulation-to-reality gaps and improving dynamic obstacle avoidance [59], 67].
Future research should focus on three priorities: (1) developing unified metrics for evaluating simulation-to-real performance, including path deviation and latency; (2) embedding ethical AI principles in motion planning to ensure transparency and accountability in decision-making; and (3) creating multi-vehicle cooperative RRT frameworks capable of risk-aware coordination under shared safety benchmarks.
5 Conclusions
Enhanced RRT-based motion planning is crucial for AV safety testing and assessment. This paper reviews various RRT enhancements, their applications, and performance evaluation strategies. While significant progress has been made, further research is required to tackle challenges in real-time computation and dynamic obstacle handling. Combining RRT with AI-based approaches offers a promising path for the next generation of AV motion planning systems.
Rapidly exploring random trees (RRT) and their advanced variants have proven to be powerful tools for path planning in autonomous driving and robotics, particularly in complex, high-dimensional environments. While the original RRT algorithm provides fast exploration of the state space, contemporary challenges such as dynamic obstacles, real-time decision-making, and adaptability require enhancements like Informed RRT*, bidirectional RRT, and integration with learning-based methods.
These adaptations significantly enhance the algorithm’s efficiency, path feasibility, and responsiveness in real-world scenarios. As autonomous systems evolve, integrating RRT with predictive models, reinforcement learning, and real-time optimization will be essential for achieving safe, reliable, and intelligent navigation in urban and highway environments.
Funding source: Ministry of Higher Education Malaysia and Universiti Teknologi Malaysia Nexus Translasi
Award Identifier / Grant number: Q.K130000.5543.10G41
Acknowledgements
This work was supported by the Ministry of Higher Education Malaysia and Universiti Teknologi Malaysia under the UTM Nexus Translasi grant Vot. No. 10G41.
-
Author contributions: Tamanna-E-Kaonain contributed to the conceptualization, literature review, and initial drafting of the manuscript. Mohd Azizi Abdul Rahman provided supervision, project guidance, contributed to the methodology design and carried out the final proofreading and editing of the manuscript. Mohd Hatta Mohammed Ariff, data interpretation, graphical illustrations and manuscript structuring. Mohd Syahid Mohd Anuar supported the technical validation and contributed to the analysis and writing process. Fauzan Ahmad assisted with the development of the study framework and contributed to the critical review of the content. Syed Zaini Putra Syed Yusoff participated in resource provision and case study development. All authors have read and agreed to the published version of the manuscript.
-
Funding information: This work was supported by Universiti Teknologi Malaysia Nexus Translasi (Q.K130000.5543.10G41).
-
Conflict of Interest: The authors declare no conflict of interest.
References
1. Thales. 7 benefits of autonomous cars. https://www.thalesgroup.com/en/markets/digital-identity-and-security/iot/magazine/7-benefits-autonomous-cars [Accessed 18 Apr 2025].Search in Google Scholar
2. Lim, W, Lee, S, Sunwoo, M, Jo, K. Hybrid trajectory planning for autonomous driving in on-road dynamic scenarios. IEEE Trans Intell Transport Syst 2021;22:341–55. https://doi.org/10.1109/tits.2019.2957797.Search in Google Scholar
3. Karaman, S, Frazzoli, E. Sampling-based algorithms for optimal motion planning. Int J Robot Res 2011;30:846–94. https://doi.org/10.1177/0278364911406761.Search in Google Scholar
4. Gutjahr, B, Groll, L, Werling, M. Lateral vehicle trajectory optimization using constrained linear time-varying MPC. IEEE Trans Intell Transport Syst 2017;18:1586–95. https://doi.org/10.1109/TITS.2016.2614705.Search in Google Scholar
5. Gammell, JD, Srinivasa, SS, Barfoot, TD. Informed RRT*: optimal sampling-based path planning focused via direct sampling of an admissible ellipsoidal heuristic. In: IEEE/RSJ international conference on intelligent robots and systems. Chicago, IL, USA: IEEE; 2014.10.1109/IROS.2014.6942976Search in Google Scholar
6. Huang, C, Tang, B, Guo, Z, Su, Q, Gai, J. Agile-RRT*: a faster and more robust path planner with enhanced initial solution and convergence rate in complex environments. IEEE Access 2024;12:58703–14. https://doi.org/10.1109/access.2024.3392926.Search in Google Scholar
7. Wang, J, Zhang, L, Huang, Y, Zhao, J, Bella, F. Safety of autonomous vehicles. J Adv Transp 2020;2020:1–13. https://doi.org/10.1155/2020/8867757.Search in Google Scholar
8. Litman, T. Autonomous vehicle implementation predictions: implications for transport planning. Victoria, Canada: Victoria Transport Policy Institute; 2025. [Online]. Available from: https://www.vtpi.org/avip.pdf? Search in Google Scholar
9. Zhang, Y, Wang, H, Yin, M, Wang, J, Hua, C. Bi-AM-RRT*: a fast and efficient sampling-based motion planning algorithm in dynamic environments. IEEE Trans Intell Veh 2024;9:1282–93. https://doi.org/10.1109/tiv.2023.3307283.Search in Google Scholar
10. Chu, K, Lee, M, Sunwoo, M. Local path planning for off-road autonomous driving with avoidance of static obstacles. IEEE Trans Intell Transport Syst 2012;13:1599–616. https://doi.org/10.1109/tits.2012.2198214.Search in Google Scholar
11. Chen, Y, Chen, S, Ren, H, Gao, Z, Liu, Z. Path tracking and handling stability control strategy with collision avoidance for the autonomous vehicle under extreme conditions. IEEE Trans Veh Technol 2020;69:14602–17. https://doi.org/10.1109/tvt.2020.3031661.Search in Google Scholar
12. S. International. SAE levels of driving automation, refined for clarity and international audience. Available from: https://www.sae.org/blog/sae-j3016-update.Search in Google Scholar
13. L. o. Congress. Who invented the automobile? Available from: http://www.loc.gov/rr/scitech/mysteries/auto.html.Search in Google Scholar
14. T. Global. What is an autonomous vehicle? Available from: https://www.twi-global.com/technical-knowledge/faqs/what-is-an-autonomous-vehicle.Search in Google Scholar
15. M. Company. By 2035, autonomous driving could create $300 billion to $400 billion in revenue. In: New research reveals what’s needed to win in the fast-changing passenger car market. New York, USA: McKinsey & Company; 2023. [Online]. Available from: https://www.mckinsey.com/industries/automotive-and-assembly/our-insights/autonomous-drivings-future-convenient-and-connected? Search in Google Scholar
16. I. Digest. 10 advantages of autonomous vehicles. Available from: https://www.itsdigest.com/10-advantages-autonomous-vehicles.Search in Google Scholar
17. Plewes, LW. Causes of road accidents. Br Med J 1957;1:1098–9. https://doi.org/10.1136/bmj.1.4975.1098.Search in Google Scholar
18. Karababa, E, Satar, B, Genc, H. Evaluation of effects of optokinetic and rotational stimuli with functional head impulse test (fHIT) in individuals with motion sickness. Eur Arch Otorhinolaryngol 2023;280:3149–56. https://doi.org/10.1007/s00405-023-07819-y.Search in Google Scholar PubMed
19. Elbanhawi, M, Simic, M, Jazar, R. In the passenger seat: investigating ride comfort measures in autonomous cars. IEEE Intell Transp Syst Mag 2015;7:4–17. https://doi.org/10.1109/mits.2015.2405571.Search in Google Scholar
20. Koopman, P, Wagner, M. Autonomous vehicle safety: an interdisciplinary challenge. IEEE Intell Transp Syst Mag 2017;9:90–6. https://doi.org/10.1109/mits.2016.2583491.Search in Google Scholar
21. Lima, P. Predictive control for autonomous driving: with experimental evaluation on a heavy-duty construction truck [Licentiate thesis]. Stockholm: KTH Royal Institute of Technology; 2016. https://doi.org/10.13140/RG.2.1.2676.3120.Search in Google Scholar
22. Bellem, H, Thiel, B, Schrauf, M, Krems, JF. Comfort in automated driving: an analysis of preferences for different automated driving styles and their dependence on personality traits. Transport Res F Traffic Psychol Behav 2018;55:90–100. https://doi.org/10.1016/j.trf.2018.02.036.Search in Google Scholar
23. Eriksson, J, Svensson, L. Tuning for ride quality in autonomous vehicle application to linear quadratic path planning algorithm, Master’s thesis. Uppsala, Sweden: Uppsala University, Faculty of Science and Technology (TekNat); 2015. [Online]. Available from: https://www.diva-portal.org/smash/get/diva2:839140/FULLTEXT01.pdf.Search in Google Scholar
24. Sun, L, Liu, C, Zhang, C, Wang, L, Wang, W. Social interactions for autonomous driving: a review and perspectives. Found Trends Robot 2022;10:198–376. https://doi.org/10.1561/2300000078.Search in Google Scholar
25. Zhang, R, Pourkand, A. Emergency-braking distance prediction using deep learning. arXiv preprint arXiv:2112.01708 2021. [Online]. Available: https://doi.org/10.48550/arXiv.2112.01708.Search in Google Scholar
26. Schultz-Krohn, W, Walter, S, Stroud, M, Marrah, S, Stonesifer, C, Liao, YK. Autonomous vehicles, design thinking, and occupational therapy. OT Pract 2019;24:20–2.Search in Google Scholar
27. Mohseni, S, Pitale, M, Singh, V, Wang, Z. Practical solutions for machine learning safety in autonomous vehicles. In: Proceedings of the workshop on artificial intelligence safety (SafeAI) @ AAAI 2020; 2020. [Online]. Available: http://ceur-ws.org/Vol-2560/paper_19.pdf.Search in Google Scholar
28. Khalid Khan, S, Shiwakoti, N, Stasinopoulos, P, Warren, M. Modelling cybersecurity regulations for automated vehicles. Accid Anal Prev 2023;186:107054. https://doi.org/10.1016/j.aap.2023.107054.Search in Google Scholar PubMed
29. Diels, C. Designing for comfort in shared and automated vehicles (SAV): a conceptual framework. In: 1st International Comfort Congress. Salerno, Italy; 2017. [Online]. Available: https://irep.ntu.ac.uk/id/eprint/30975.Search in Google Scholar
30. Cui, J, Liew, LS, Sabaliauskaite, G, Zhou, F. A review on safety failures, security attacks, and available countermeasures for autonomous vehicles. Ad Hoc Netw 2019;90:101823. https://doi.org/10.1016/j.adhoc.2018.12.006.Search in Google Scholar
31. Hamid, UZA. Autonomous emergency braking system with potential field risk assessment for frontal collision mitigation. In: IEEE conference on systems, process and control (ICSPC). Melaka, Malaysia: IEEE; 201710.1109/SPC.2017.8313024Search in Google Scholar
32. Zhao, H. Safety score: a quantitative approach to guiding safety-aware autonomous vehicle computing system design. In: IEEE intelligent vehicles symposium (IV). Las Vegas, NV, USA: IEEE; 2020.10.1109/IV47402.2020.9304602Search in Google Scholar
33. Victor, S, Receveur, J-B, Melchior, P, Lanusse, P. Optimal trajectory planning and robust tracking using vehicle model inversion. IEEE Trans Intell Transport Syst 2022;23:4556–69. https://doi.org/10.1109/tits.2020.3045917.Search in Google Scholar
34. Cofield, RG, Rakesh, G. Reactive trajectory planning and tracking for pedestrian-aware autonomous driving in urban environments. In: IEEE intelligent vehicles symposium (IV). Gothenburg, Sweden. IEEE [Online]; 2016. Available: https://alumni.media.mit.edu/∼rgupta/pdf/IV2016_Gupta.pdf.10.1109/IVS.2016.7535471Search in Google Scholar
35. Gonzalez, D, Perez, J, Milanes, V, Nashashibi, F. A review of motion planning techniques for automated vehicles. IEEE Trans Intell Transport Syst 2016;17:1135–45. https://doi.org/10.1109/tits.2015.2498841.Search in Google Scholar
36. Paden, B, Cap, M, Yong, SZ, Yershov, D, Frazzoli, E. A survey of motion planning and control techniques for self-driving urban vehicles. IEEE Trans Intell Veh 2016;1:33–55. https://doi.org/10.1109/tiv.2016.2578706.Search in Google Scholar
37. Schwarting, W, Alonso-Mora, J, Rus, D. Planning and decision-making for autonomous vehicles. Annu Rev Control Robotics Auton Syst 2018;1:187–210. https://doi.org/10.1146/annurev-control-060117-105157.Search in Google Scholar
38. Zhao, J, Liang, B, Chen, Q. The key technology toward the self-driving car. Int J Intell Unmanned Syst 2018;6:2–20. https://doi.org/10.1108/ijius-08-2017-0008.Search in Google Scholar
39. Gasparetto, A, Boscariol, P, Lanzutti, A, Vidoni, R. Path planning and trajectory planning algorithms: a general overview (chapter 1). In: Motion and operation planning of robotic systems (mechanisms and machine science). Cham: Springer; 2015:3–27 pp.10.1007/978-3-319-14705-5_1Search in Google Scholar
40. Lai, T, Zhi, W, Hermans, T, Ramos, F. Parallelised diffeomorphic sampling-based motion planning. arXiv preprint arXiv:2108.11775 2021. https://doi.org/10.48550/arXiv.2108.11775.Search in Google Scholar
41. Likhachev, DM. Primer to search-based motion planning. Available from: http://sbpl.net/node/50.Search in Google Scholar
42. Muralidharan, A, Mostofi, Y. Path planning for minimizing the expected cost until success. IEEE Trans Robot 2019;35:466–81. https://doi.org/10.1109/tro.2018.2883829.Search in Google Scholar
43. Johnson, EN, Mooney, JG. A comparison of automatic nap‐of‐the‐earth guidance strategies for helicopters. J Field Robot 2014;31:637–53. https://doi.org/10.1002/rob.21514.Search in Google Scholar
44. Liu, C, Feng, Q, Tang, Z, Wang, X, Geng, J, Xu, L. Motion planning of the citrus-picking manipulator based on the TO-RRT algorithm. Agriculture 2022;12:581. https://doi.org/10.3390/agriculture12050581.Search in Google Scholar
45. Karaman, S, Frazzoli, E. Optimal kinodynamic motion planning using incremental sampling-based methods. In: 49th IEEE conference on decision and control (CDC). Atlanta, GA, USA. IEEE; 2010.10.1109/CDC.2010.5717430Search in Google Scholar
46. Kumar, BSA, S P. RoboCup team description , IRL, RC. In: RoboCup 2010: small size league team description papers. [Online]. Erlangen: University of Erlangen-Nuremberg; 2010. Available: https://ssl.robocup.org/team-description-papers.Search in Google Scholar
47. Akgun, B, Stilman, M. Sampling heuristics for optimal motion planning in high dimensions. In: 2011 IEEE/RSJ international conference on intelligent robots and systems. San Francisco, CA, USA. IEEE; 2011.10.1109/IROS.2011.6048838Search in Google Scholar
48. Liu, C, Lee, S, Varnhagen, S, Tseng, HE. Path planning for autonomous vehicles using model predictive control. In: Presented at the IEEE Intelligent Vehicles Symposium (IV). Los Angeles, CA, USA: IEEE; 2017.10.1109/IVS.2017.7995716Search in Google Scholar
49. Thomason, W, Knepper, RA. A unified sampling-based approach to integrated task and motion planning. In: Robotics Research, (Springer Proceedings in Advanced Robotics; 2022, ch. Chapter 47. p. 773–88.10.1007/978-3-030-95459-8_47Search in Google Scholar
50. Batkovic, I, Zanon, M, Ali, M, Falcone, P. Real-Time constrained trajectory planning and vehicle control for proactive autonomous driving with road users. In: 18th European control conference (ECC). Naples, Italy: IEEE; 2019.10.23919/ECC.2019.8796099Search in Google Scholar
51. Fereydooni, N, Tenenboim, E, Walker, BN, Peeta, S. Incorporating situation awareness cues in virtual reality for users in dynamic in-Vehicle environments. IEEE Trans Vis Comput Graph 2022;28:3865–73. https://doi.org/10.1109/TVCG.2022.3203086.Search in Google Scholar PubMed
52. Amin, J, Bokovic, J, Mehra, R. A fast and efficient approach to path planning for unmanned vehicles. In: AIAA guidance, navigation, and control conference and exhibit. Keystone, CO, USA and Reston, VA, USA: American Institute of Aeronautics and Astronautics (AIAA); 2006.10.2514/6.2006-6103Search in Google Scholar
53. Puente-Castro, A, Rivero, D, Pazos, A, Fernandez-Blanco, E. A review of artificial intelligence applied to path planning in UAV swarms. Neural Comput Appl 2021;34:153–70. https://doi.org/10.1007/s00521-021-06569-4.Search in Google Scholar
54. LaValle, SM. Rapidly-exploring random trees: a new tool for path planning. In: Computer Science Department, Iowa State University. Ames, IA, USA: TR 98-11; 1998. [Online]. Available: http://msl.cs.uiuc.edu/∼lavalle/papers/Lav98c.pdf.Search in Google Scholar
55. LaValle, SM, Kuffner, JJ. Randomized kinodynamic planning. Int J Robot Res 2001;20:378–400. https://doi.org/10.1177/02783640122067453.Search in Google Scholar
56. Youjing, C, Shuzhi Sam, G. Autonomous vehicle positioning with gps in urban canyon environments. IEEE Trans Robot Autom 2003;19:15–25. https://doi.org/10.1109/tra.2002.807557.Search in Google Scholar
57. Huang, Z, Chen, S, Pian, Y, Sheng, Z, Ahn, S, Noyce, DA. CV2X-LOCA: roadside unit-enabled cooperative localization framework for autonomous vehicles. arXiv preprint arXiv:2304.00676 2023. https://doi.org/10.48550/arXiv.2304.00676.Search in Google Scholar
58. Elbanhawi, M, Simic, M. Sampling-based robot motion planning: a review. IEEE Access 2014;2:56–77. https://doi.org/10.1109/access.2014.2302442.Search in Google Scholar
59. Wu, CH, Chan, KY. Developing a dynamic obstacle avoidance system for autonomous Mobile robots using Bayesian optimization and object tracking: implementation and testing. Proc IME C J Mech Eng Sci 2023;238:4007–22. https://doi.org/10.1177/09544062231207510.Search in Google Scholar
60. Mao, S, Yang, P, Gao, D, Bao, C, Wang, Z. A motion planning method for unmanned surface vehicle based on improved RRT algorithm. J Mar Sci Eng 2023;11:687. https://doi.org/10.3390/jmse11040687.Search in Google Scholar
61. Best, A, Narang, S, Barber, D, Manocha, D.: autonomous vehicle planning with dynamic maneuvers and traffic constraints. In: IEEE/RSJ iInternational conference on intelligent robots and systems (IROS). Vancouver, BC, Canada and Piscataway, NJ, USA: Institute of Electrical and Electronics Engineers (IEEE); 2017.10.1109/IROS.2017.8206087Search in Google Scholar
62. Schmerling, E, Pavone, M. Kinodynamic planning. In: Encyclopedia of Robotics; 2021, ch. Chapter 171-1:1–9 pp.10.1007/978-3-642-41610-1_171-1Search in Google Scholar
63. Ho, QH, Sunberg, ZN, Lahijanian, M. Gaussian belief trees for chance constrained asymptotically optimal motion planning. In: International conference on robotics and automation (ICRA). Philadelphia, PA, USA and Piscataway, NJ, USA: Institute of Electrical and Electronics Engineers (IEEE); 2022.10.1109/ICRA46639.2022.9812343Search in Google Scholar
64. Abdul Razak, SF, Yogarayan, S, Ullah, A. Preventing impaired driving using IoT on steering wheels approach. HighTech Innov J 2024;5:400–9. https://doi.org/10.28991/hij-2024-05-02-012.Search in Google Scholar
65. Abuzwidah, M, Elawady, A, Wang, L, Zeiada, W. Assessing the impact of adverse weather on performance and safety of connected and autonomous vehicles. Civ Eng J 2024;10:3070–89. https://doi.org/10.28991/cej-2024-010-09-019.Search in Google Scholar
66. Jiang, Y, Pang, X, Zhang, Z, Jing, H, Wei, L, Su, J, et al.. Integrating intelligent sensors for safe UAV distribution: design and evaluation of ranging system. HighTech Innov J 2024;5:603–13. https://doi.org/10.28991/hij-2024-05-03-04.Search in Google Scholar
67. Tobin, J, Fong, R, Ray, A, Schneider, J, Zaremba, W, Abbeel, P. Domain randomization for transferring deep neural networks from simulation to the real world. In: IEEE/RSJ international conference on intelligent robots and systems (IROS). Vancouver, BC, Canada and Piscataway, NJ, USA: Institute of Electrical and Electronics Engineers (IEEE); 2017.10.1109/IROS.2017.8202133Search in Google Scholar
68. Voogd, K, Allamaa, JP, Alonso-Mora, J, Son, TD. Reinforcement learning from simulation to real world autonomous driving using digital twin. 10.48550/arXiv.2211.14874. IFAC-PapersOnLine 2022;56:1510–15. (22nd IFAC World Congress – Yokohama, Japan) https://doi.org/10.48550/arXiv.2211.14874.Search in Google Scholar
69. Garcia Bedoya, O, Ferreira, JV. Risk analysis for cooperation between the driver and the control system of an autonomous vehicle. Int Rev Mech Eng 2018;12:354. https://doi.org/10.15866/ireme.v12i4.13054.Search in Google Scholar
70. Jasour, A, Han, W, Williams, BC. Convex risk-bounded continuous-time trajectory planning and tube design in uncertain nonconvex environments. Int J Robot Res 2023;42:705–28. https://doi.org/10.1177/02783649231183458.Search in Google Scholar
71. Meng, F, Chen, L, Ma, H, Wang, J, Meng, MQH. NR-RRT: neural risk-aware near-optimal path planning in uncertain nonconvex environments. IEEE Trans Autom Sci Eng 2024;21:135–46. https://doi.org/10.1109/tase.2022.3215562.Search in Google Scholar
72. Meng, F, Chen, L, Ma, H, Wang, J, Meng, MQH. Learning-based risk-bounded path planning under environmental uncertainty. IEEE Trans Autom Sci Eng 2024;21:4460–70. https://doi.org/10.1109/tase.2023.3297176.Search in Google Scholar
73. Ma, H, Meng, F, Ye, C, Wang, J, Meng, MQH. Bi-Risk-RRT based efficient motion planning for autonomous ground vehicles. IEEE Trans Intell Veh 2022;7:722–33. https://doi.org/10.1109/tiv.2022.3152740.Search in Google Scholar
74. Han, W, Jasour, A, Williams, B. Real-time tube-based non-gaussian risk bounded motion planning for stochastic nonlinear systems in uncertain environments via motion primitives. In: IEEE/RSJ international conference on intelligent robots and systems (IROS). Detroit, MI, USA and Piscataway, NJ, USA: Institute of Electrical and Electronics Engineers (IEEE); 2023.10.1109/IROS55552.2023.10342429Search in Google Scholar
75. Han, W, Jasour, A, Williams, B. Non-gaussian risk bounded trajectory optimization for stochastic nonlinear systems in uncertain environments. In: International conference on robotics and automation (ICRA). Philadelphia, PA, USA and Piscataway, NJ, USA: Institute of Electrical and Electronics Engineers (IEEE); 2022.10.1109/ICRA46639.2022.9811363Search in Google Scholar
76. Banginwar, P, Sands, T. Autonomous vehicle control comparison. Veh 2022;4:1109–21. https://doi.org/10.3390/vehicles4040059.Search in Google Scholar
77. Li, N, Oyler, DW, Zhang, M, Yildiz, Y, Kolmanovsky, I, Girard, AR. Game theoretic modeling of driver and vehicle interactions for verification and validation of autonomous vehicle control systems. IEEE Trans Control Syst Technol 2018;26:1782–97. https://doi.org/10.1109/tcst.2017.2723574.Search in Google Scholar
78. Yang, S, Shimosaka, M. Efficient and asymptotically optimal vehicle motion planning with stochastic template-based RRT. IEEE Access 2025;13:38533–47. https://doi.org/10.1109/access.2025.3546158.Search in Google Scholar
79. Guan, T, Han, Y, Kong, M, Wang, S, Feng, D, Yang, W. An improved artificial potential field with RRT star algorithm for autonomous vehicle path planning. Sci Rep 2025;15:16982. https://doi.org/10.1038/s41598-025-00694-z.Search in Google Scholar PubMed PubMed Central
© 2025 the author(s), published by De Gruyter, Berlin/Boston
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Research Articles
- Pareto-optimal solutions for light rail operations: evaluating acceleration strategies to maximise commercial speed
- Strength of vapour cloud explosions in a traffic environment: a numerical parametric study
- Dynamic concept drift detection using an integrated machine learning model with error-based Page-Hinkley Test for enhanced predictive accuracy in adhesive manufacturing process
- Post-peak compressive response and energy absorption of ternary pozzolanic mortar reinforced with PVA fibers
- Backstepping adaptive sliding mode control based on a time-varying barrier function for the suppressing stick-slip vibrations
- New research on ternary hybrid nanofluid flow across a surface with the influence of thermal radiation using semi-numerical simulation
- Evaluation of the efficiency of air-cushion conveyor modernization through digital monitoring and modeling
- Processing of lead-containing industrial waste in Kazakhstan
- Optimizing mechanical component design with population-based metaheuristics
- Numerical modeling and forecasting of water overflow through dams on the Syrdarya river
- A methodology for parallel loading of distribution transformers with different impedance voltages
- Force control of series elastic actuators using sliding mode control theory
- Flexural strengthening of reinforced concrete beams using external steel elements with different end conditions
- Review Articles
- Enhanced RRT motion planning for autonomous vehicles: a review on safety testing applications
- A systematic review on rejuvenators in flexible asphalt pavement: types, content, methods, performance, and applications
- Pressurized solid liquid extraction of red yeast rice and the extract application as a natural dye of cotton fabrics
Articles in the same Issue
- Research Articles
- Pareto-optimal solutions for light rail operations: evaluating acceleration strategies to maximise commercial speed
- Strength of vapour cloud explosions in a traffic environment: a numerical parametric study
- Dynamic concept drift detection using an integrated machine learning model with error-based Page-Hinkley Test for enhanced predictive accuracy in adhesive manufacturing process
- Post-peak compressive response and energy absorption of ternary pozzolanic mortar reinforced with PVA fibers
- Backstepping adaptive sliding mode control based on a time-varying barrier function for the suppressing stick-slip vibrations
- New research on ternary hybrid nanofluid flow across a surface with the influence of thermal radiation using semi-numerical simulation
- Evaluation of the efficiency of air-cushion conveyor modernization through digital monitoring and modeling
- Processing of lead-containing industrial waste in Kazakhstan
- Optimizing mechanical component design with population-based metaheuristics
- Numerical modeling and forecasting of water overflow through dams on the Syrdarya river
- A methodology for parallel loading of distribution transformers with different impedance voltages
- Force control of series elastic actuators using sliding mode control theory
- Flexural strengthening of reinforced concrete beams using external steel elements with different end conditions
- Review Articles
- Enhanced RRT motion planning for autonomous vehicles: a review on safety testing applications
- A systematic review on rejuvenators in flexible asphalt pavement: types, content, methods, performance, and applications
- Pressurized solid liquid extraction of red yeast rice and the extract application as a natural dye of cotton fabrics