Complex dynamics of a sub-quadratic Lorenz-like system
-
Zhenpeng Li
 ,
Guiyao Ke
,
Haijun Wang
,
Jun Pan
,
Guiyao Ke
,
Haijun Wang
,
Jun Pan

Abstract
Motivated by the generic dynamical property of most quadratic Lorenz-type systems that the unstable manifolds of the origin tending to the stable manifold of nontrivial symmetrical equilibria forms a pair of heteroclinic orbits, this technical note reports a new 3D sub-quadratic Lorenz-like system:
1 Introduction
Since Li et al. [1,2] introduced the method for proving the existence of heteroclinic orbits of the Chen system: Lyapunov function combining the definitions of both
However, in neighboring Lorenz-type systems, the scenario for the unstable manifolds of nontrivial symmetrical equilibria tending to the stable manifold of the origin that creates a pair of heteroclinic orbits has seldom been considered in any publications to the best of our knowledge. Therefore, the following questions naturally arise:
Whether does there exist such a model with a pair of heteroclinic orbits to stable origin and a pair of non trivial symmetrical equilibria?
If there is such a model, whether is the aforementioned technique (combining the definitions of both
Except for the heteroclinic orbit, whether do there exist other rich dynamics like the quadratic Lorenz-type system family [3,5,7,13,25,26] – for example, chaotic attractors, sustained or transient chaotic sets, Hopf bifurcation, invariant algebraic surfaces, ultimate bound sets, globally exponentially attractive sets, homoclinic orbits, singularly degenerate heteroclinic cycles, and so on.
There exist another heteroclinic orbits to a pair of unstable equilibria and another pair of stable equilibria.
On the invariant algebraic surface
2 New sub-quadratic Lorenz-like system and main results
In this section, we introduce the following sub-quadratic Lorenz-like system
where the dot denotes the derivative with respect to the time
Remark 2.1
On the one hand, for
The goal of the present article will mainly devote to investigating the complex dynamics of system (2.1) as the quadratic analog [5], especially the role played by the term
The first result of this article deals with the local behaviors of system (2.1) and is summarized in the following propositions.
Proposition 2.1
The distribution of the equilibrium points of system (2.1) is summarized in
Table 1
when the parameters
The distribution of the equilibrium points
|
|
|
|
|
Distribution of equilibria |
|---|---|---|---|---|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|||
|
|
|
|||
|
|
|
|
||
|
|
|
Remark 2.2
Remarkably, system (2.1) is continuous but not smooth at
Proposition 2.2
When
The dynamical behaviors of
|
|
|
|
Type of
|
Property of
|
|---|---|---|---|---|
|
|
|
|
Saddle-focus | A 3D
|
|
|
Saddle | A 1D
|
||
|
|
|
Nonhyperbolic | A 2D
|
|
|
|
Saddle | A 1D
|
||
|
|
|
Node-focus | A 2D
|
|
|
|
Saddle | A 1D
|
||
|
|
|
|
Nonhyperbolic | A 1D
|
|
|
A 1D
|
|||
|
|
|
A 3D
|
||
|
|
A 1D
|
|||
|
|
|
A 2D
|
||
|
|
A 1D
|
|||
|
|
|
|
Saddle-focus | A 1D
|
|
|
Saddle | A 2D
|
||
|
|
|
Nonhyperbolic | A 1D
|
|
|
|
Saddle | A 2D
|
||
|
|
|
Node-focus | A 3D
|
|
|
|
Saddle | A 2D
|
The dynamical behaviors of
|
|
|
Property of
|
|---|---|---|
|
|
A 1D
|
|
|
|
|
A 2D
|
|
|
A 3D
|
|
|
|
A 1D
|
Proposition 2.3
When
Proposition 2.4
Set
where
Remark 2.3
On the one hand, the existence of hidden or transient chaotic attractors involves the dynamics of
Our second result on the global boundedness of system (2.1) can be summarized as follows.
Proposition 2.5
For
is the ultimate bound and positively invariant set of system (2.1), where
In fact, Proposition 2.5 suggests the following Proposition 2.6, implying that the ultimate bound and positively invariant sets coincide with globally exponentially attractive sets.
Proposition 2.6
Set
By the definition, the sets
are globally exponentially attractive sets of system (2.1), where
The proof of Propositions 2.5 and 2.6 involves Lagrange multiplier method, Lyapunov function and comparison principle.
Our last result can be stated as the following proposition.
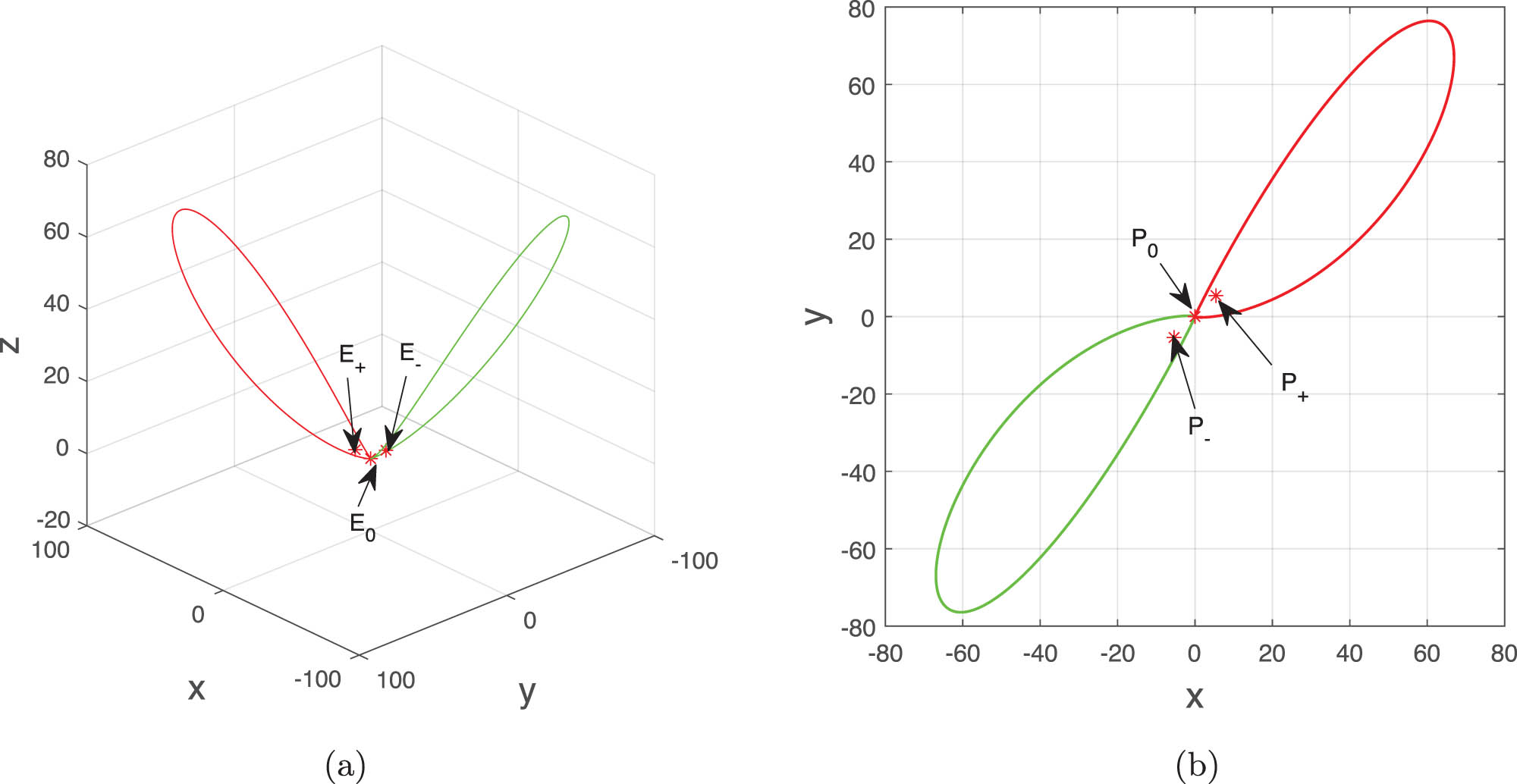
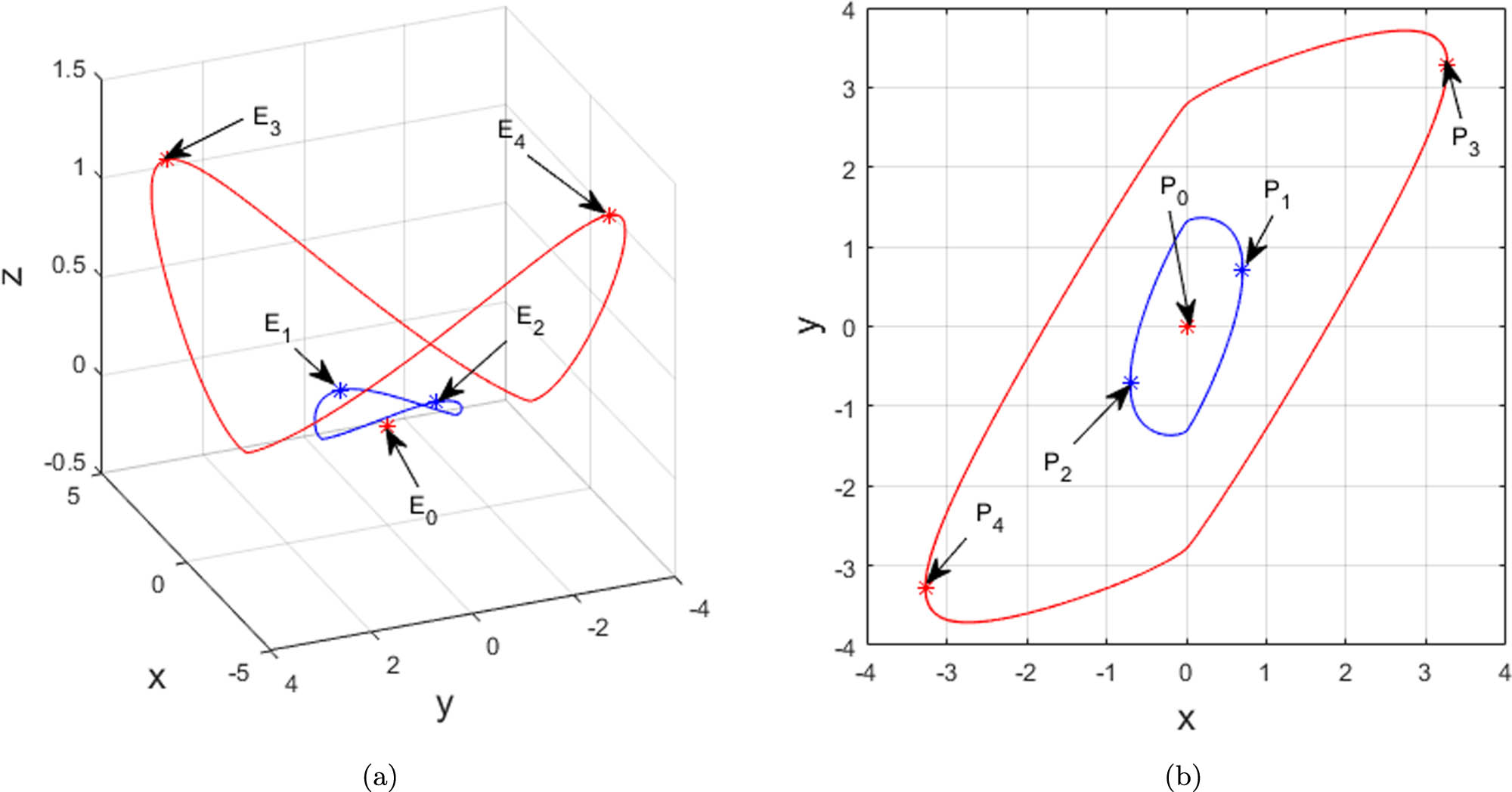
Proposition 2.7
Assume
System (2.1) has no homoclinic orbits but only four heteroclinic orbits: the two ones are
The proof of Proposition 2.7 is based on the Lyapunov function, concepts of both
This article is organized as follows. In Section 3, we discuss the local dynamics of system (2.1) and prove Propositions 2.2–2.4, such as the distribution of the equilibrium points, stability and Hopf bifurcation. In Sections 4 and 5, the existence of ultimate bound sets, globally exponentially attractive sets and invariant algebraic surfaces are studied, and the proofs of Propositions 2.5 and 2.6 are finished. The proof of Proposition 2.7 is given in Section 6. Section 7 illustrates the singularly degenerate heteroclinic cycles and nearby chaotic attractors. In Section 8, we present a short discussion about the future work, especially the relationship between power of the polynomials and chaos.
3 Local behaviors and proofs of Propositions 2.2–2.4
The sketch of proofs of Propositions 2.2–2.4 is presented as follows.
Proof of Proposition 2.2
The proof of Proposition 2.2 easily follows from linear analysis and is omitted here.□
Proof of Proposition 2.3
Due to the symmetry of
Let us prove that
Suppose
If not, the condition
The proof is finished.□
Proof of Proposition 2.4
Due to the symmetry of
According to Routh-Hurwitz criterion and Eq. (3.2),
For
where
Next, by applying the project method [29,30], we compute the Lyapunov coefficients to determine the stability of the Hopf bifurcation at
First, by the time and coordinate transformations
one transforms system (2.1) into the resulting equivalent system
Obviously,
In fact, the characteristic equation of
from which,
where
Second, the following transformation
converts system (3.3) into the resulting equivalent one
From Eq. (3.5), we arrive at the following multilinear symmetric functions:
Owing to the complex algebraic structure of system (3.5) itself, it is a taxing work to compute the explicit form of its first coefficient
Proposition 3.1
For
Proof
In accordance with the procedures of the project method [29, 30], we perform computations and obtain
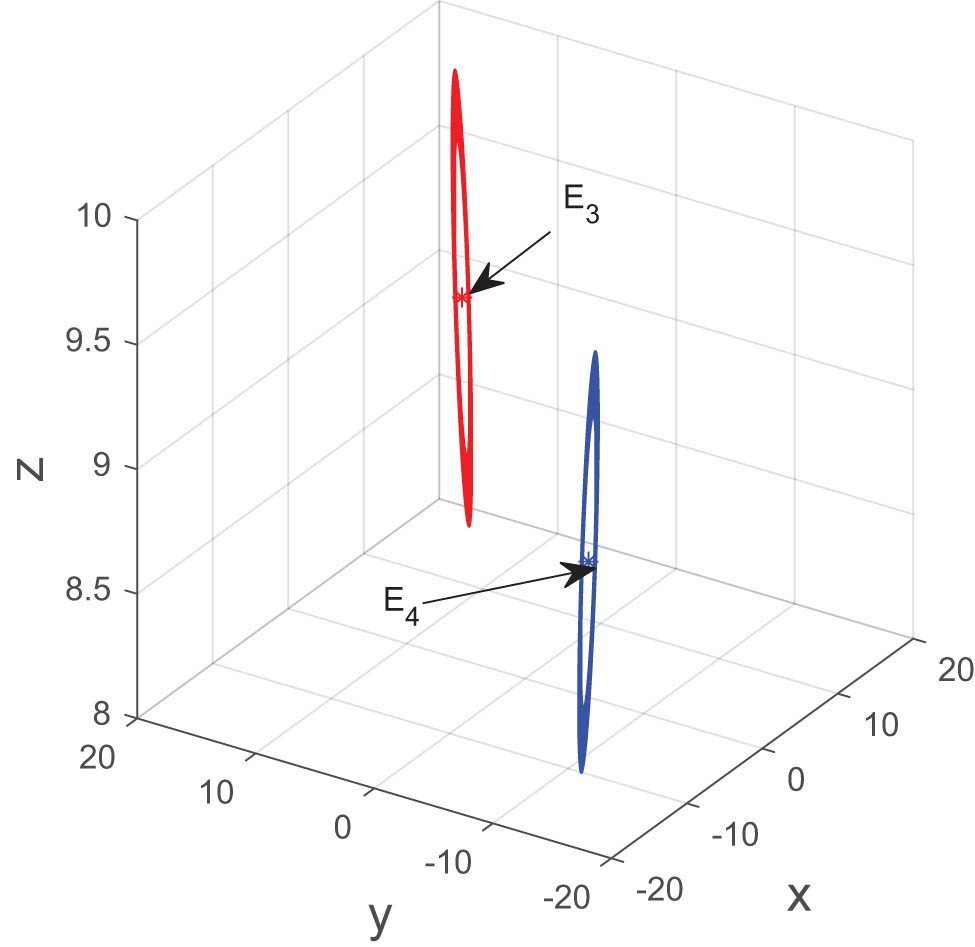
Phase portrait of system (3.3) with
Remark 3.1
For the case of
4 The ultimate boundedness and the proof of Proposition 2.5
In this section, one considers the ultimate bound sets of system (2.1). First, we prove the global stability of
Proposition 4.1
Consider system (2.1) and assume
Proof
Set
with the derivatives
for
with
for
Furthermore, it follows Eqs. (4.1) and (4.2) that
As a fact,
Since
Therefore,
To prove Proposition 2.5, we consider the following two propositions in advance.
Proposition 4.2
Define a set
and
Proof of Proposition 4.2
The statement directly follows from the Lagrange multiplier method.□
Proposition 4.3
If
and
Proof of Proposition 4.3
The proof is easily proved by using Proposition 4.2.
Let us take
Then we have
By solving the following conditional extremum problem of
According to Proposition 4.1, we can easily obtain the aforementioned conditional extremum problem (4.5) as follows:
Proof of Proposition 2.5
The ultimate boundedness of solutions of system (2.1) follows from Proposition 4.2 and 4.3.
Define the following positively definite and radially unbound Lyapunov function:
The derivative of
Let
is an ellipsoid in
Obviously,
According to Proposition 2.2, we can easily obtain the aforementioned conditional extremum problem (4.9) as follows:
This completes the proof.□
5 Global attractive set and the proof of Proposition 2.6
By aid of comparison principle and Lyapunov function, one in this section considers the globally exponentially attractive set of system (2.1) and the proof of Proposition 2.6 follows.
Proof of Proposition 2.6
It follows Eq. (4.7) that one has
(1) If
(2) If
(3) If
In all, we have
By the definition, taking upper limit on both sides of the above inequality (5.1) as
Namely, the sets
are the globally exponentially attractive sets of system (2.1), where
Remark 5.1
When
When
While
Remark 5.2
When
6 Homoclinic and heteroclinic orbit
For the sake of discussion, let
Put the first Lyapunov function
for
for
It follows that
and
respectively,
Combining Lyapunov functions
First, we formulate the following conclusion.
Proposition 6.1
Consider
If
If
Proof
(i) For
In fact,
Since
(ii) First, we prove the fact:
Based on Proposition 6.1, the proof of Proposition 2.7 easily follows.
Proof of Proposition 2.7
(a) Because of
for
Therefore,
(b) Assume
i.e.,
According to statement (a), each branch of the unstable manifold
Because of
Next, we discuss global bifurcation of the invariant algebraic surface:
For
When
At this time, system (6.6) has the equilibrium points:
for
for
Proposition 6.2
If
Proposition 6.3
(1) If
(2) While
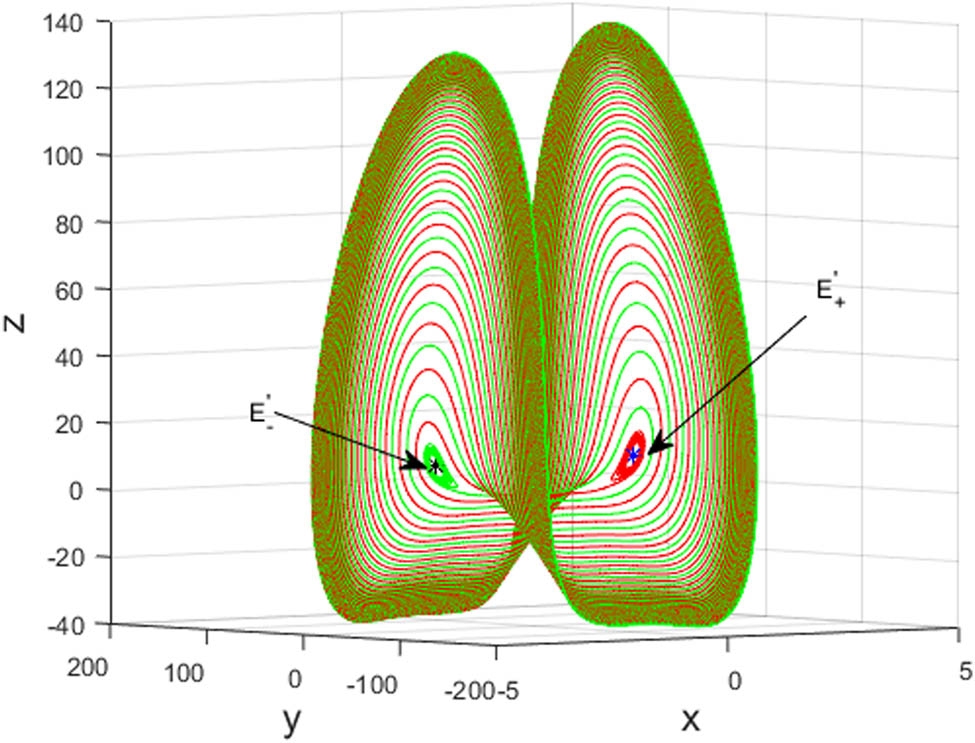
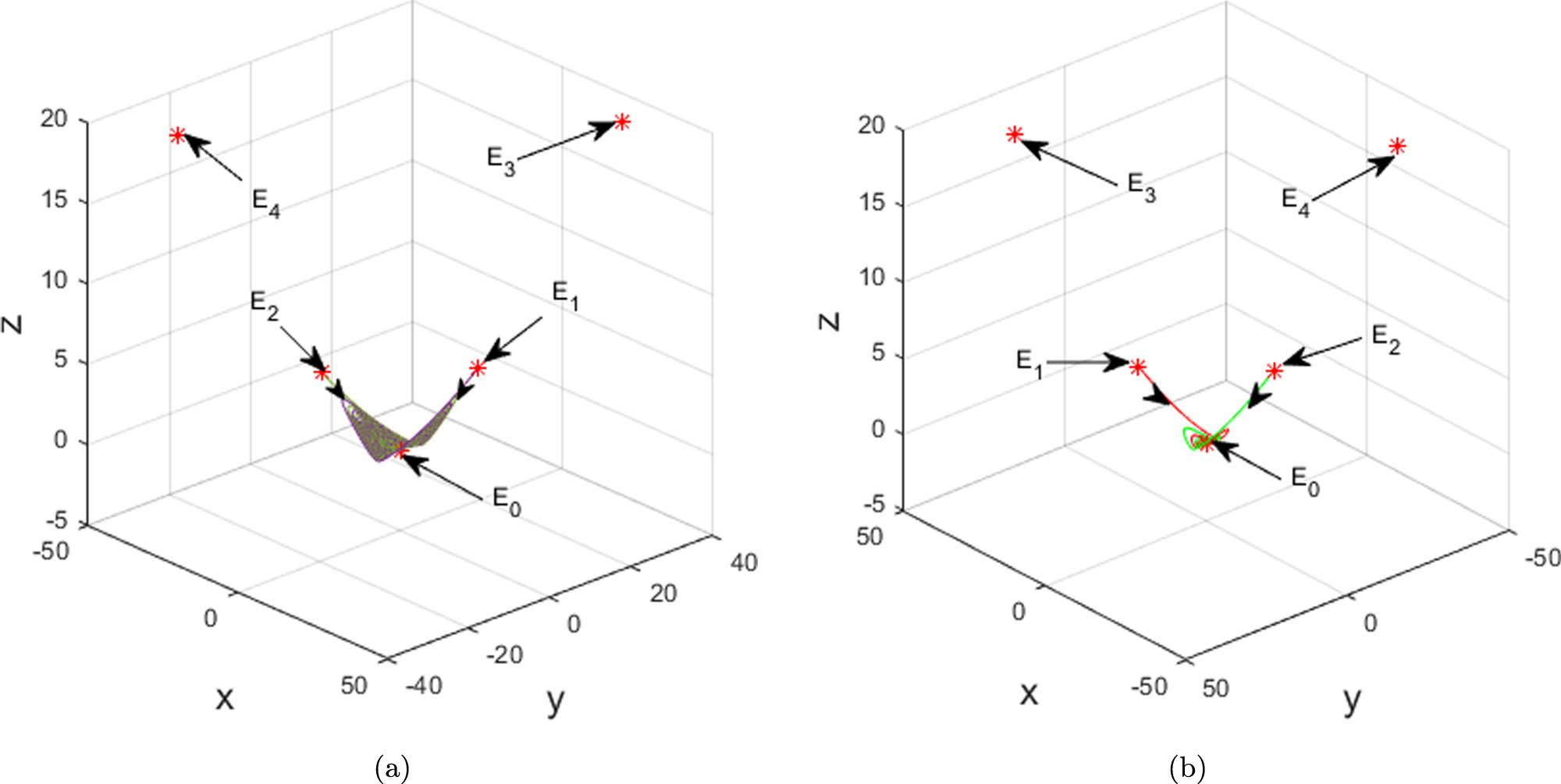
7 Singularly degenerate heteroclinic cycle
A singularly degenerate heteroclinic cycle is an important concept when studying quadratic Lorenz-like system family, the collapse of which is one route to chaos or hyperchaos [7,8,10,11,25,26,31,32]. However, the occurrence of this scenario does not happen in the cubic Lorenz-type system [12]. Therefore, a question naturally arises: Whether does there exist such dynamical behavior in a sub-quadratic Lorenz-like system?
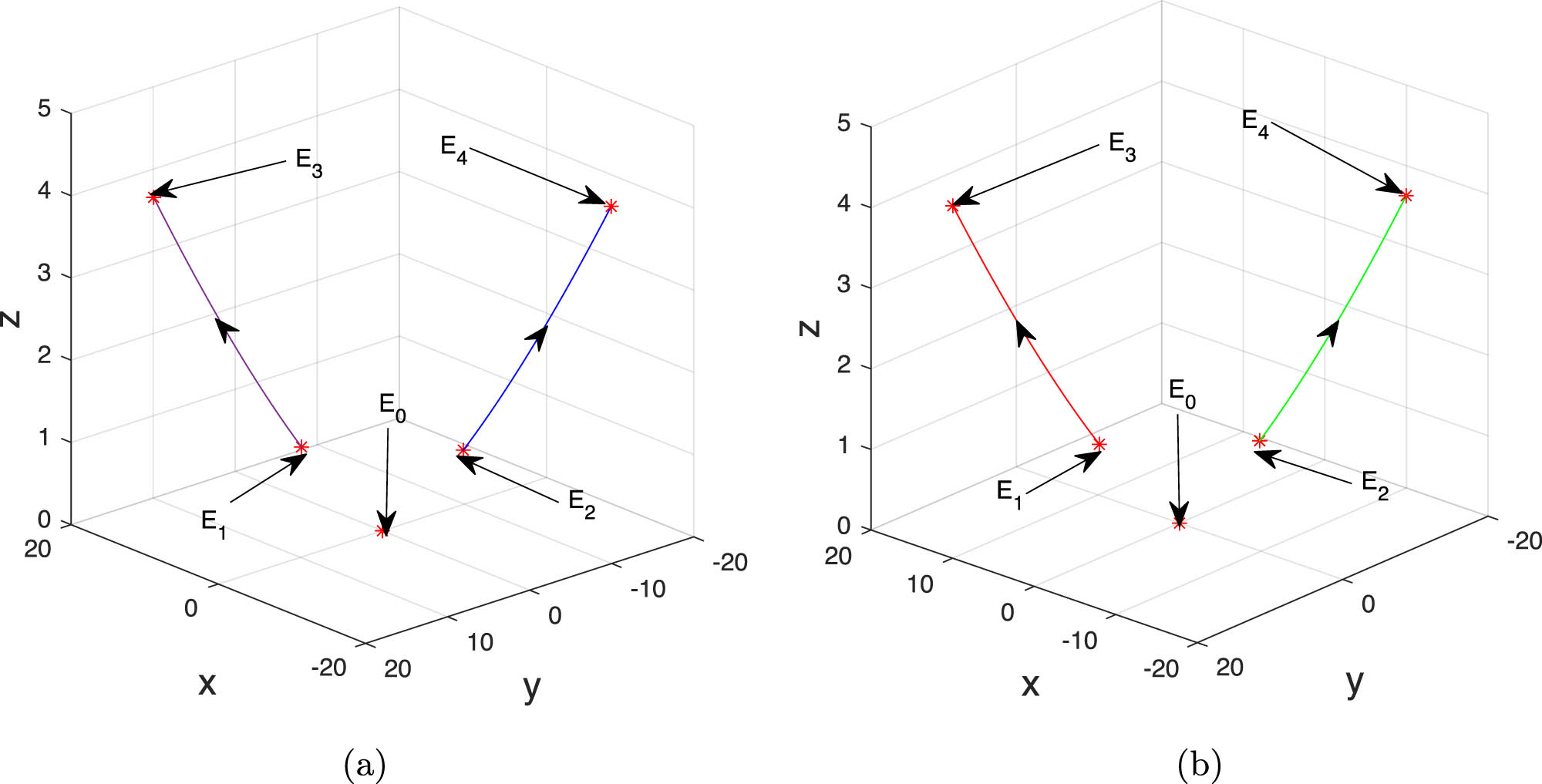
In this section, we illustrate strange attractors through collapse of singularly degenerate heteroclinic cycles and explosions of stable isolated equilibria
Numerical result 7.1. Assume
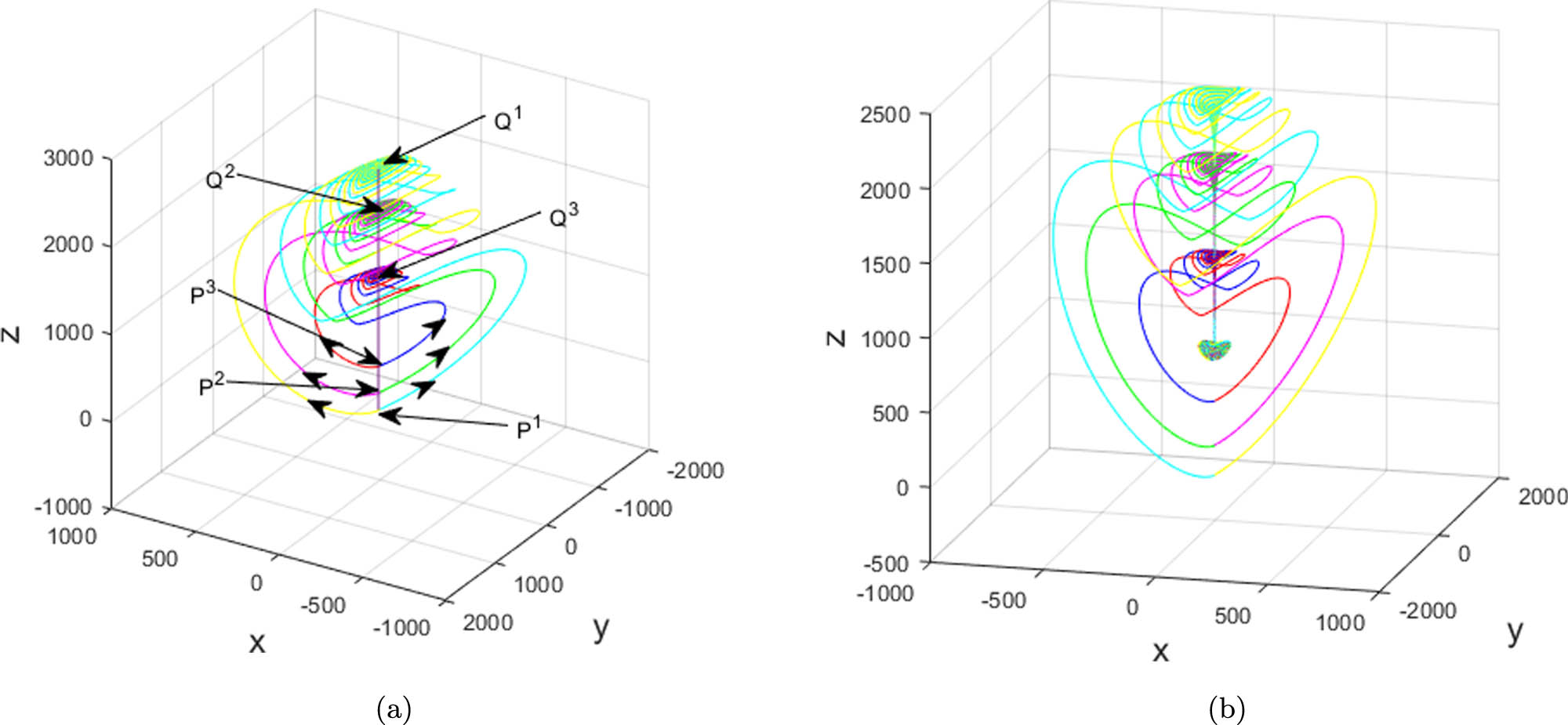
For (a)
Numerical result 7.2. Assume
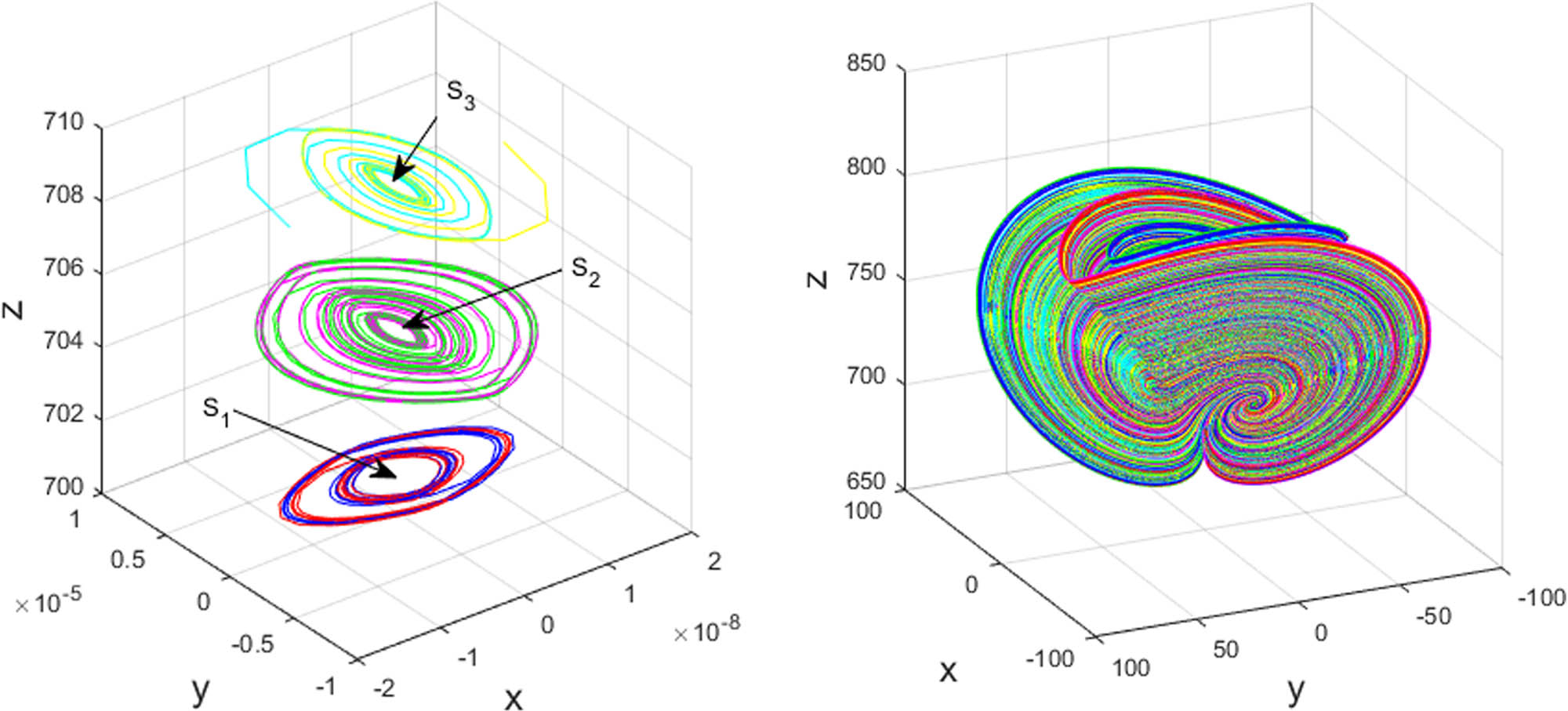
For (a)
8 Conclusion
In contrast to most existing quadratic Lorenz-type system family with a pair of heteroclinic orbits to a saddle in the origin and a pair of nontrivial symmetrical stable equilibria, little seems to be known about the ones with heteroclinic orbits to the stable origin and a pair of nontrivial symmetrical unstable equilibria. To achieve this target, this article proposed a new 3D sub-quadratic Lorenz-like system and proved the existence of heteroclinic orbits of the type just described. Meanwhile, the existence of another two pairs of heteroclinic orbits to the corresponding two pairs of nontrivial symmetrical equilibria was also proved by utilizing the same Lyapunov function. By applying a Hamiltonian function, the existence of homoclinic and heteroclinic orbits was also discussed on the invariant algebraic surface
It should be noticed that the term
-
Funding information: This work was supported by National Natural Science Foundation of China (12001489), Natural Science Foundation of Zhejiang Guangsha Vocational and Technical University of construction (2022KYQD-KGY), Zhejiang Public Welfare Technology Application Research Project of China (LGN21F020003), Natural Science Foundation of Taizhou University (T20210906033), and Natural Science Foundation of Zhejiang Province (LY20A020001, LQ18A010001). At the same time, the authors wish to express their sincere thanks to the anonymous editors and reviewers for their conscientious reading and numerous valuable comments which extremely improve the presentation of this article.
-
Author contributions: All authors have accepted responsibility for the entire content of this manuscript and approved its submission.
-
Conflict of interest: The authors state no conflict of interest.
-
Data availability statement: There are no data because the results obtained in this article can be reproduced based on the information given in this article.
References
[1] Li TC, Chen GT, Chen GR. On homoclinic and heteroclinic orbits of the Chen’s system. Int J Bifurcat Chaos. 2006;16(10):3035–41. 10.1142/S021812740601663XSuche in Google Scholar
[2] Tigan G, Llibre J. Heteroclinic homoclinic and closed orbits in the Chen system. Int J Bifurcat Chaos. 2016;26(4):1650072-1-6. 10.1142/S0218127416500723Suche in Google Scholar
[3] Liu Y, Yang Q. Dynamics of a new Lorenz-like chaotic system. Nonlinear Anal-Real. 2010;11(4):2563–72. 10.1016/j.nonrwa.2009.09.001Suche in Google Scholar
[4] Tigan G, Constantinescu D. Heteroclinic orbits in the T and the Lü system. Chaos Solitons Fractals. 2009;42(1):20–3. 10.1016/j.chaos.2008.10.024Suche in Google Scholar
[5] Liu Y, Pang W. Dynamics of the general Lorenz family. Nonlinear Dyn. 2012;67:1595–611. 10.1007/s11071-011-0090-7Suche in Google Scholar
[6] Wang H, Li C, Li X. New heteroclinic orbits coined. Int J Bifurcat Chaos. 2016;26(12):1650194-1-13. 10.1142/S0218127416501947Suche in Google Scholar
[7] Wang H, Zhang F. Bifurcations ultimate boundedness and singular orbits in a unified hyperchaotic Lorenz-type system. Discrete Contin Dyn Syst Ser B. 2020;25(5):1791–820. 10.3934/dcdsb.2020003Suche in Google Scholar
[8] Wang H, Fan H, Pan J. Complex dynamics of a four-dimensional circuitsystem. Int J Bifurcation Chaos. 2021;31(14):2150208-1–31. 10.1142/S0218127421502084Suche in Google Scholar
[9] Wang H, Ke G, Pan J, Hu F, Fan H. Multitudinous potential hidden Lorenz-like attractors coined. Eur Phys J Spec Top. 2022;231:359–68. 10.1140/epjs/s11734-021-00423-3Suche in Google Scholar
[10] Wang H, Li X. Infinitely many heteroclinic orbits of a complex Lorenz system. Int J Bifurcat Chaos. 2017;27(7):1750110-1-14. 10.1142/S0218127417501103Suche in Google Scholar
[11] Wang H, Li X. A novel hyperchaotic system with infinitely many heteroclinic orbits coined. Chaos Solitons Fractals. 2018;106:5–15. 10.1016/j.chaos.2017.10.029Suche in Google Scholar
[12] Li X, Wang H. A three-dimensional nonlinear system with a single heteroclinic trajectory. J Appl Anal Comput. 2020;10(1):249–66. 10.11948/20190135Suche in Google Scholar
[13] Chen Y, Yang Q. Dynamics of a hyperchaotic Lorenz-type system. Nonlinear Dyn. 2014;77(3):569–81. 10.1007/s11071-014-1318-0Suche in Google Scholar
[14] Leonov GA. Fishing principle for homoclinic and heteroclinic trajectories. Nonlinear Dyn. 2014;78:2751–8. 10.1007/s11071-014-1622-8Suche in Google Scholar
[15] Wiggins S. Introduction to applied nonlinear dynamical system and chaos. New York: Springer; 2003. Suche in Google Scholar
[16] Shilnikov LP, Shilnikov AL, Turaev DV, Chua LO. Methods of qualitative theory in nonlinear dynamics (part II). Singapore: World Scientific; 2001. 10.1142/4221Suche in Google Scholar
[17] Guckenheimer J, Holmes P. Nonlinear oscillations, dynamical systems, and bifurcations of vector fields. 3th ed. Berlin: Springer; 1983. 10.1007/978-1-4612-1140-2Suche in Google Scholar
[18] Tigan G, Turaev D. Analytical search for homoclinic bifurcations in the Shimizu-Morioka model. Phys D. 2011;240:985–9. 10.1016/j.physd.2011.02.013Suche in Google Scholar
[19] Freire E, Rodriguez-Luis AJ, Gamero E, Ponce E. A case study for homoclinicchaos in an autonomous electronic circuit: A trip from Takens-Bogdanov to Hopf-Shilnikov. Phys D. 1993;62:230–53. 10.1016/0167-2789(93)90284-8Suche in Google Scholar
[20] Glendinning P, Sparrow C. Local and global behaviour near homoclinic orbit. J Stat Phys. 1984;35:645–96. 10.1007/BF01010828Suche in Google Scholar
[21] Hunt GW, Peletier MA, Champneys AR, Woods PD, Wadee MA, Budd CJ, et al. Cellular buckling in longstructures. Nonlinear Dyn. 2000;21:3–29. 10.1023/A:1008398006403Suche in Google Scholar
[22] Koon WS, Lo MW, Marsden JE, Ross SD. Heteroclinic connections between periodic orbits and resonance transitions in celestial mechanics. Chaos. 2000;10:427–69. 10.1063/1.166509Suche in Google Scholar PubMed
[23] Wilczak D, Zgliczyński P. Heteroclinic connections between periodic orbitsin planar restricted circular three body problem-A computer assisted proof. Commun Math Phys. 2003;234:37–75. 10.1007/s00220-002-0709-0Suche in Google Scholar
[24] Wilczak D, Zgliczyński P. Heteroclinic connections between periodic orbitsin planar restricted circular three body problem (part II). Commun Math Phys. 2005;259:561–76. 10.1007/s00220-005-1374-xSuche in Google Scholar
[25] Wang H, Dong G. New dynamics coined in a 4-D quadratic autonomous hyper-chaotic system. Appl Math Comput. 2019;346:272–86. 10.1016/j.amc.2018.10.006Suche in Google Scholar
[26] Messias M. Dynamics at infinity and the existence of singularly degenerate heteroclinic cycles in the Lorenz system. J Phys A Math Theor. 2009;42(11):115101-1-18. 10.1088/1751-8113/42/11/115101Suche in Google Scholar
[27] Zhang X, Chen G. Constructing an autonomous system with infinitely many chaotic attractors. Chaos Interdiscip J Nonlinear Sci. 2017;27(7):0711011–5. 10.1063/1.4986356Suche in Google Scholar PubMed
[28] Kuznetsov NV, Mokaev TN, Kuznetsova OA, Kudryashova EV. The Lorenz system: hidden boundary of practical stability and the Lyapunov dimension. Nonlinear Dyn. 2020;102:713–32. 10.1007/s11071-020-05856-4Suche in Google Scholar
[29] Kuzenetsov YA. Elements of applied bifurcation theory. 3rd ed. New York: Springer-Verlag; 2004. Suche in Google Scholar
[30] Sotomayor J, Mello LF, Braga DC. Lyapunov coefficients for degenerate Hopf bifurcations. arXiv:0709.3949v1 [Preprint]. 2007 [cited 2007 Sep 25]: [16 p.]. https://arxiv.org/abs/0709.3949. Suche in Google Scholar
[31] Wang H, Fan H, Pan J. A true three-scroll chaotic attractor coined. Discrete Contin Dyn Syst Ser B. 2022;27(5):2891–915. 10.3934/dcdsb.2021165Suche in Google Scholar
[32] Wang H, Ke G, Dong G, Su Q, Pan J. Singularly degenerate heteroclinic cycles with nearby apple-shape attractors. Int J Bifurcat Chaos. 2023;31(1):2350011-1–23. 10.1142/S0218127423500116Suche in Google Scholar
© 2023 the author(s), published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Artikel in diesem Heft
- Regular Articles
- Dynamic properties of the attachment oscillator arising in the nanophysics
- Parametric simulation of stagnation point flow of motile microorganism hybrid nanofluid across a circular cylinder with sinusoidal radius
- Fractal-fractional advection–diffusion–reaction equations by Ritz approximation approach
- Behaviour and onset of low-dimensional chaos with a periodically varying loss in single-mode homogeneously broadened laser
- Ammonia gas-sensing behavior of uniform nanostructured PPy film prepared by simple-straightforward in situ chemical vapor oxidation
- Analysis of the working mechanism and detection sensitivity of a flash detector
- Flat and bent branes with inner structure in two-field mimetic gravity
- Heat transfer analysis of the MHD stagnation-point flow of third-grade fluid over a porous sheet with thermal radiation effect: An algorithmic approach
- Weighted survival functional entropy and its properties
- Bioconvection effect in the Carreau nanofluid with Cattaneo–Christov heat flux using stagnation point flow in the entropy generation: Micromachines level study
- Study on the impulse mechanism of optical films formed by laser plasma shock waves
- Analysis of sweeping jet and film composite cooling using the decoupled model
- Research on the influence of trapezoidal magnetization of bonded magnetic ring on cogging torque
- Tripartite entanglement and entanglement transfer in a hybrid cavity magnomechanical system
- Compounded Bell-G class of statistical models with applications to COVID-19 and actuarial data
- Degradation of Vibrio cholerae from drinking water by the underwater capillary discharge
- Multiple Lie symmetry solutions for effects of viscous on magnetohydrodynamic flow and heat transfer in non-Newtonian thin film
- Thermal characterization of heat source (sink) on hybridized (Cu–Ag/EG) nanofluid flow via solid stretchable sheet
- Optimizing condition monitoring of ball bearings: An integrated approach using decision tree and extreme learning machine for effective decision-making
- Study on the inter-porosity transfer rate and producing degree of matrix in fractured-porous gas reservoirs
- Interstellar radiation as a Maxwell field: Improved numerical scheme and application to the spectral energy density
- Numerical study of hybridized Williamson nanofluid flow with TC4 and Nichrome over an extending surface
- Controlling the physical field using the shape function technique
- Significance of heat and mass transport in peristaltic flow of Jeffrey material subject to chemical reaction and radiation phenomenon through a tapered channel
- Complex dynamics of a sub-quadratic Lorenz-like system
- Stability control in a helicoidal spin–orbit-coupled open Bose–Bose mixture
- Research on WPD and DBSCAN-L-ISOMAP for circuit fault feature extraction
- Simulation for formation process of atomic orbitals by the finite difference time domain method based on the eight-element Dirac equation
- A modified power-law model: Properties, estimation, and applications
- Bayesian and non-Bayesian estimation of dynamic cumulative residual Tsallis entropy for moment exponential distribution under progressive censored type II
- Computational analysis and biomechanical study of Oldroyd-B fluid with homogeneous and heterogeneous reactions through a vertical non-uniform channel
- Predictability of machine learning framework in cross-section data
- Chaotic characteristics and mixing performance of pseudoplastic fluids in a stirred tank
- Isomorphic shut form valuation for quantum field theory and biological population models
- Vibration sensitivity minimization of an ultra-stable optical reference cavity based on orthogonal experimental design
- Effect of dysprosium on the radiation-shielding features of SiO2–PbO–B2O3 glasses
- Asymptotic formulations of anti-plane problems in pre-stressed compressible elastic laminates
- A study on soliton, lump solutions to a generalized (3+1)-dimensional Hirota--Satsuma--Ito equation
- Tangential electrostatic field at metal surfaces
- Bioconvective gyrotactic microorganisms in third-grade nanofluid flow over a Riga surface with stratification: An approach to entropy minimization
- Infrared spectroscopy for ageing assessment of insulating oils via dielectric loss factor and interfacial tension
- Influence of cationic surfactants on the growth of gypsum crystals
- Study on instability mechanism of KCl/PHPA drilling waste fluid
- Analytical solutions of the extended Kadomtsev–Petviashvili equation in nonlinear media
- A novel compact highly sensitive non-invasive microwave antenna sensor for blood glucose monitoring
- Inspection of Couette and pressure-driven Poiseuille entropy-optimized dissipated flow in a suction/injection horizontal channel: Analytical solutions
- Conserved vectors and solutions of the two-dimensional potential KP equation
- The reciprocal linear effect, a new optical effect of the Sagnac type
- Optimal interatomic potentials using modified method of least squares: Optimal form of interatomic potentials
- The soliton solutions for stochastic Calogero–Bogoyavlenskii Schiff equation in plasma physics/fluid mechanics
- Research on absolute ranging technology of resampling phase comparison method based on FMCW
- Analysis of Cu and Zn contents in aluminum alloys by femtosecond laser-ablation spark-induced breakdown spectroscopy
- Nonsequential double ionization channels control of CO2 molecules with counter-rotating two-color circularly polarized laser field by laser wavelength
- Fractional-order modeling: Analysis of foam drainage and Fisher's equations
- Thermo-solutal Marangoni convective Darcy-Forchheimer bio-hybrid nanofluid flow over a permeable disk with activation energy: Analysis of interfacial nanolayer thickness
- Investigation on topology-optimized compressor piston by metal additive manufacturing technique: Analytical and numeric computational modeling using finite element analysis in ANSYS
- Breast cancer segmentation using a hybrid AttendSeg architecture combined with a gravitational clustering optimization algorithm using mathematical modelling
- On the localized and periodic solutions to the time-fractional Klein-Gordan equations: Optimal additive function method and new iterative method
- 3D thin-film nanofluid flow with heat transfer on an inclined disc by using HWCM
- Numerical study of static pressure on the sonochemistry characteristics of the gas bubble under acoustic excitation
- Optimal auxiliary function method for analyzing nonlinear system of coupled Schrödinger–KdV equation with Caputo operator
- Analysis of magnetized micropolar fluid subjected to generalized heat-mass transfer theories
- Does the Mott problem extend to Geiger counters?
- Stability analysis, phase plane analysis, and isolated soliton solution to the LGH equation in mathematical physics
- Effects of Joule heating and reaction mechanisms on couple stress fluid flow with peristalsis in the presence of a porous material through an inclined channel
- Bayesian and E-Bayesian estimation based on constant-stress partially accelerated life testing for inverted Topp–Leone distribution
- Dynamical and physical characteristics of soliton solutions to the (2+1)-dimensional Konopelchenko–Dubrovsky system
- Study of fractional variable order COVID-19 environmental transformation model
- Sisko nanofluid flow through exponential stretching sheet with swimming of motile gyrotactic microorganisms: An application to nanoengineering
- Influence of the regularization scheme in the QCD phase diagram in the PNJL model
- Fixed-point theory and numerical analysis of an epidemic model with fractional calculus: Exploring dynamical behavior
- Computational analysis of reconstructing current and sag of three-phase overhead line based on the TMR sensor array
- Investigation of tripled sine-Gordon equation: Localized modes in multi-stacked long Josephson junctions
- High-sensitivity on-chip temperature sensor based on cascaded microring resonators
- Pathological study on uncertain numbers and proposed solutions for discrete fuzzy fractional order calculus
- Bifurcation, chaotic behavior, and traveling wave solution of stochastic coupled Konno–Oono equation with multiplicative noise in the Stratonovich sense
- Thermal radiation and heat generation on three-dimensional Casson fluid motion via porous stretching surface with variable thermal conductivity
- Numerical simulation and analysis of Airy's-type equation
- A homotopy perturbation method with Elzaki transformation for solving the fractional Biswas–Milovic model
- Heat transfer performance of magnetohydrodynamic multiphase nanofluid flow of Cu–Al2O3/H2O over a stretching cylinder
- ΛCDM and the principle of equivalence
- Axisymmetric stagnation-point flow of non-Newtonian nanomaterial and heat transport over a lubricated surface: Hybrid homotopy analysis method simulations
- HAM simulation for bioconvective magnetohydrodynamic flow of Walters-B fluid containing nanoparticles and microorganisms past a stretching sheet with velocity slip and convective conditions
- Coupled heat and mass transfer mathematical study for lubricated non-Newtonian nanomaterial conveying oblique stagnation point flow: A comparison of viscous and viscoelastic nanofluid model
- Power Topp–Leone exponential negative family of distributions with numerical illustrations to engineering and biological data
- Extracting solitary solutions of the nonlinear Kaup–Kupershmidt (KK) equation by analytical method
- A case study on the environmental and economic impact of photovoltaic systems in wastewater treatment plants
- Application of IoT network for marine wildlife surveillance
- Non-similar modeling and numerical simulations of microploar hybrid nanofluid adjacent to isothermal sphere
- Joint optimization of two-dimensional warranty period and maintenance strategy considering availability and cost constraints
- Numerical investigation of the flow characteristics involving dissipation and slip effects in a convectively nanofluid within a porous medium
- Spectral uncertainty analysis of grassland and its camouflage materials based on land-based hyperspectral images
- Application of low-altitude wind shear recognition algorithm and laser wind radar in aviation meteorological services
- Investigation of different structures of screw extruders on the flow in direct ink writing SiC slurry based on LBM
- Harmonic current suppression method of virtual DC motor based on fuzzy sliding mode
- Micropolar flow and heat transfer within a permeable channel using the successive linearization method
- Different lump k-soliton solutions to (2+1)-dimensional KdV system using Hirota binary Bell polynomials
- Investigation of nanomaterials in flow of non-Newtonian liquid toward a stretchable surface
- Weak beat frequency extraction method for photon Doppler signal with low signal-to-noise ratio
- Electrokinetic energy conversion of nanofluids in porous microtubes with Green’s function
- Examining the role of activation energy and convective boundary conditions in nanofluid behavior of Couette-Poiseuille flow
- Review Article
- Effects of stretching on phase transformation of PVDF and its copolymers: A review
- Special Issue on Transport phenomena and thermal analysis in micro/nano-scale structure surfaces - Part IV
- Prediction and monitoring model for farmland environmental system using soil sensor and neural network algorithm
- Special Issue on Advanced Topics on the Modelling and Assessment of Complicated Physical Phenomena - Part III
- Some standard and nonstandard finite difference schemes for a reaction–diffusion–chemotaxis model
- Special Issue on Advanced Energy Materials - Part II
- Rapid productivity prediction method for frac hits affected wells based on gas reservoir numerical simulation and probability method
- Special Issue on Novel Numerical and Analytical Techniques for Fractional Nonlinear Schrodinger Type - Part III
- Adomian decomposition method for solution of fourteenth order boundary value problems
- New soliton solutions of modified (3+1)-D Wazwaz–Benjamin–Bona–Mahony and (2+1)-D cubic Klein–Gordon equations using first integral method
- On traveling wave solutions to Manakov model with variable coefficients
- Rational approximation for solving Fredholm integro-differential equations by new algorithm
- Special Issue on Predicting pattern alterations in nature - Part I
- Modeling the monkeypox infection using the Mittag–Leffler kernel
- Spectral analysis of variable-order multi-terms fractional differential equations
- Special Issue on Nanomaterial utilization and structural optimization - Part I
- Heat treatment and tensile test of 3D-printed parts manufactured at different build orientations
Artikel in diesem Heft
- Regular Articles
- Dynamic properties of the attachment oscillator arising in the nanophysics
- Parametric simulation of stagnation point flow of motile microorganism hybrid nanofluid across a circular cylinder with sinusoidal radius
- Fractal-fractional advection–diffusion–reaction equations by Ritz approximation approach
- Behaviour and onset of low-dimensional chaos with a periodically varying loss in single-mode homogeneously broadened laser
- Ammonia gas-sensing behavior of uniform nanostructured PPy film prepared by simple-straightforward in situ chemical vapor oxidation
- Analysis of the working mechanism and detection sensitivity of a flash detector
- Flat and bent branes with inner structure in two-field mimetic gravity
- Heat transfer analysis of the MHD stagnation-point flow of third-grade fluid over a porous sheet with thermal radiation effect: An algorithmic approach
- Weighted survival functional entropy and its properties
- Bioconvection effect in the Carreau nanofluid with Cattaneo–Christov heat flux using stagnation point flow in the entropy generation: Micromachines level study
- Study on the impulse mechanism of optical films formed by laser plasma shock waves
- Analysis of sweeping jet and film composite cooling using the decoupled model
- Research on the influence of trapezoidal magnetization of bonded magnetic ring on cogging torque
- Tripartite entanglement and entanglement transfer in a hybrid cavity magnomechanical system
- Compounded Bell-G class of statistical models with applications to COVID-19 and actuarial data
- Degradation of Vibrio cholerae from drinking water by the underwater capillary discharge
- Multiple Lie symmetry solutions for effects of viscous on magnetohydrodynamic flow and heat transfer in non-Newtonian thin film
- Thermal characterization of heat source (sink) on hybridized (Cu–Ag/EG) nanofluid flow via solid stretchable sheet
- Optimizing condition monitoring of ball bearings: An integrated approach using decision tree and extreme learning machine for effective decision-making
- Study on the inter-porosity transfer rate and producing degree of matrix in fractured-porous gas reservoirs
- Interstellar radiation as a Maxwell field: Improved numerical scheme and application to the spectral energy density
- Numerical study of hybridized Williamson nanofluid flow with TC4 and Nichrome over an extending surface
- Controlling the physical field using the shape function technique
- Significance of heat and mass transport in peristaltic flow of Jeffrey material subject to chemical reaction and radiation phenomenon through a tapered channel
- Complex dynamics of a sub-quadratic Lorenz-like system
- Stability control in a helicoidal spin–orbit-coupled open Bose–Bose mixture
- Research on WPD and DBSCAN-L-ISOMAP for circuit fault feature extraction
- Simulation for formation process of atomic orbitals by the finite difference time domain method based on the eight-element Dirac equation
- A modified power-law model: Properties, estimation, and applications
- Bayesian and non-Bayesian estimation of dynamic cumulative residual Tsallis entropy for moment exponential distribution under progressive censored type II
- Computational analysis and biomechanical study of Oldroyd-B fluid with homogeneous and heterogeneous reactions through a vertical non-uniform channel
- Predictability of machine learning framework in cross-section data
- Chaotic characteristics and mixing performance of pseudoplastic fluids in a stirred tank
- Isomorphic shut form valuation for quantum field theory and biological population models
- Vibration sensitivity minimization of an ultra-stable optical reference cavity based on orthogonal experimental design
- Effect of dysprosium on the radiation-shielding features of SiO2–PbO–B2O3 glasses
- Asymptotic formulations of anti-plane problems in pre-stressed compressible elastic laminates
- A study on soliton, lump solutions to a generalized (3+1)-dimensional Hirota--Satsuma--Ito equation
- Tangential electrostatic field at metal surfaces
- Bioconvective gyrotactic microorganisms in third-grade nanofluid flow over a Riga surface with stratification: An approach to entropy minimization
- Infrared spectroscopy for ageing assessment of insulating oils via dielectric loss factor and interfacial tension
- Influence of cationic surfactants on the growth of gypsum crystals
- Study on instability mechanism of KCl/PHPA drilling waste fluid
- Analytical solutions of the extended Kadomtsev–Petviashvili equation in nonlinear media
- A novel compact highly sensitive non-invasive microwave antenna sensor for blood glucose monitoring
- Inspection of Couette and pressure-driven Poiseuille entropy-optimized dissipated flow in a suction/injection horizontal channel: Analytical solutions
- Conserved vectors and solutions of the two-dimensional potential KP equation
- The reciprocal linear effect, a new optical effect of the Sagnac type
- Optimal interatomic potentials using modified method of least squares: Optimal form of interatomic potentials
- The soliton solutions for stochastic Calogero–Bogoyavlenskii Schiff equation in plasma physics/fluid mechanics
- Research on absolute ranging technology of resampling phase comparison method based on FMCW
- Analysis of Cu and Zn contents in aluminum alloys by femtosecond laser-ablation spark-induced breakdown spectroscopy
- Nonsequential double ionization channels control of CO2 molecules with counter-rotating two-color circularly polarized laser field by laser wavelength
- Fractional-order modeling: Analysis of foam drainage and Fisher's equations
- Thermo-solutal Marangoni convective Darcy-Forchheimer bio-hybrid nanofluid flow over a permeable disk with activation energy: Analysis of interfacial nanolayer thickness
- Investigation on topology-optimized compressor piston by metal additive manufacturing technique: Analytical and numeric computational modeling using finite element analysis in ANSYS
- Breast cancer segmentation using a hybrid AttendSeg architecture combined with a gravitational clustering optimization algorithm using mathematical modelling
- On the localized and periodic solutions to the time-fractional Klein-Gordan equations: Optimal additive function method and new iterative method
- 3D thin-film nanofluid flow with heat transfer on an inclined disc by using HWCM
- Numerical study of static pressure on the sonochemistry characteristics of the gas bubble under acoustic excitation
- Optimal auxiliary function method for analyzing nonlinear system of coupled Schrödinger–KdV equation with Caputo operator
- Analysis of magnetized micropolar fluid subjected to generalized heat-mass transfer theories
- Does the Mott problem extend to Geiger counters?
- Stability analysis, phase plane analysis, and isolated soliton solution to the LGH equation in mathematical physics
- Effects of Joule heating and reaction mechanisms on couple stress fluid flow with peristalsis in the presence of a porous material through an inclined channel
- Bayesian and E-Bayesian estimation based on constant-stress partially accelerated life testing for inverted Topp–Leone distribution
- Dynamical and physical characteristics of soliton solutions to the (2+1)-dimensional Konopelchenko–Dubrovsky system
- Study of fractional variable order COVID-19 environmental transformation model
- Sisko nanofluid flow through exponential stretching sheet with swimming of motile gyrotactic microorganisms: An application to nanoengineering
- Influence of the regularization scheme in the QCD phase diagram in the PNJL model
- Fixed-point theory and numerical analysis of an epidemic model with fractional calculus: Exploring dynamical behavior
- Computational analysis of reconstructing current and sag of three-phase overhead line based on the TMR sensor array
- Investigation of tripled sine-Gordon equation: Localized modes in multi-stacked long Josephson junctions
- High-sensitivity on-chip temperature sensor based on cascaded microring resonators
- Pathological study on uncertain numbers and proposed solutions for discrete fuzzy fractional order calculus
- Bifurcation, chaotic behavior, and traveling wave solution of stochastic coupled Konno–Oono equation with multiplicative noise in the Stratonovich sense
- Thermal radiation and heat generation on three-dimensional Casson fluid motion via porous stretching surface with variable thermal conductivity
- Numerical simulation and analysis of Airy's-type equation
- A homotopy perturbation method with Elzaki transformation for solving the fractional Biswas–Milovic model
- Heat transfer performance of magnetohydrodynamic multiphase nanofluid flow of Cu–Al2O3/H2O over a stretching cylinder
- ΛCDM and the principle of equivalence
- Axisymmetric stagnation-point flow of non-Newtonian nanomaterial and heat transport over a lubricated surface: Hybrid homotopy analysis method simulations
- HAM simulation for bioconvective magnetohydrodynamic flow of Walters-B fluid containing nanoparticles and microorganisms past a stretching sheet with velocity slip and convective conditions
- Coupled heat and mass transfer mathematical study for lubricated non-Newtonian nanomaterial conveying oblique stagnation point flow: A comparison of viscous and viscoelastic nanofluid model
- Power Topp–Leone exponential negative family of distributions with numerical illustrations to engineering and biological data
- Extracting solitary solutions of the nonlinear Kaup–Kupershmidt (KK) equation by analytical method
- A case study on the environmental and economic impact of photovoltaic systems in wastewater treatment plants
- Application of IoT network for marine wildlife surveillance
- Non-similar modeling and numerical simulations of microploar hybrid nanofluid adjacent to isothermal sphere
- Joint optimization of two-dimensional warranty period and maintenance strategy considering availability and cost constraints
- Numerical investigation of the flow characteristics involving dissipation and slip effects in a convectively nanofluid within a porous medium
- Spectral uncertainty analysis of grassland and its camouflage materials based on land-based hyperspectral images
- Application of low-altitude wind shear recognition algorithm and laser wind radar in aviation meteorological services
- Investigation of different structures of screw extruders on the flow in direct ink writing SiC slurry based on LBM
- Harmonic current suppression method of virtual DC motor based on fuzzy sliding mode
- Micropolar flow and heat transfer within a permeable channel using the successive linearization method
- Different lump k-soliton solutions to (2+1)-dimensional KdV system using Hirota binary Bell polynomials
- Investigation of nanomaterials in flow of non-Newtonian liquid toward a stretchable surface
- Weak beat frequency extraction method for photon Doppler signal with low signal-to-noise ratio
- Electrokinetic energy conversion of nanofluids in porous microtubes with Green’s function
- Examining the role of activation energy and convective boundary conditions in nanofluid behavior of Couette-Poiseuille flow
- Review Article
- Effects of stretching on phase transformation of PVDF and its copolymers: A review
- Special Issue on Transport phenomena and thermal analysis in micro/nano-scale structure surfaces - Part IV
- Prediction and monitoring model for farmland environmental system using soil sensor and neural network algorithm
- Special Issue on Advanced Topics on the Modelling and Assessment of Complicated Physical Phenomena - Part III
- Some standard and nonstandard finite difference schemes for a reaction–diffusion–chemotaxis model
- Special Issue on Advanced Energy Materials - Part II
- Rapid productivity prediction method for frac hits affected wells based on gas reservoir numerical simulation and probability method
- Special Issue on Novel Numerical and Analytical Techniques for Fractional Nonlinear Schrodinger Type - Part III
- Adomian decomposition method for solution of fourteenth order boundary value problems
- New soliton solutions of modified (3+1)-D Wazwaz–Benjamin–Bona–Mahony and (2+1)-D cubic Klein–Gordon equations using first integral method
- On traveling wave solutions to Manakov model with variable coefficients
- Rational approximation for solving Fredholm integro-differential equations by new algorithm
- Special Issue on Predicting pattern alterations in nature - Part I
- Modeling the monkeypox infection using the Mittag–Leffler kernel
- Spectral analysis of variable-order multi-terms fractional differential equations
- Special Issue on Nanomaterial utilization and structural optimization - Part I
- Heat treatment and tensile test of 3D-printed parts manufactured at different build orientations