Controlling the physical field using the shape function technique
-
ThanhTrung Trang
 ,
ThanhLong Pham
,
ThanhLong Pham

Abstract
A field is described as a region under the influence of some physical force, such as electricity, magnetism, or heat. It is a continuous distribution in the space of continuous quantities. The characteristics of the field are that the values vary continuously between neighboring points. However, because of the continuous nature of the field, it is possible to approximate a physical field of interpolation operations to reduce the cost of sampling and simplify the calculation. This article introduces the modeling of the parametric intensity of physical fields in a general form based on the interpolation shape function technique. Besides the node points with sample data, there are interpolation points, whose accuracy depends significantly on the type of interpolation function and the number of node points sampled. Therefore, a comparative analysis of theoretical shape functions (TSFs) and experimental shape functions (ESFs) is carried out to choose a more suitable type of shape function when interpolating. Specifically, the temperature field is the quantity selected to apply, analyze, and conduct experiments. Theoretical computations, experiments, and comparisons of results have been obtained for each type of shape function in the same physical model under the same experimental conditions. The results show that ESF has an accuracy (error of 0.66%) much better than TSF (error of 10.34%). Moreover, the field model surveyed by a generalized reduced gradient algorithm allows for identifying points with the required parameter values presented in detail. The illustrated calculations on temperature field control in the article show that the solution for both forward and reverse problems can be determined very quickly with high accuracy and stability. Therefore, this technique is expected to be entirely feasible when applied to thermal control processes such as drying in paint technology, kilns, and heat dissipation in practice.
1 Introduction
In engineering, the presence of physical fields such as temperature, electromagnetism, sound, and light is prevalent. They are continuous quantities whose values vary in space. Except in realistic situations, these physical fields are intentionally created by technology. They are usually maintained by controlled emitters to control the field’s energy for the design engineer’s specific purpose. The values of these quantities gradually decrease from the emitter’s source to the field’s boundary. There are also complex superposition effects for fields with multiple sources, in which specific rules determine the parameter intensity at points in the field.
Due to the invisible nature of these fields, when one wants to determine a physical field area with specific characteristics, it is necessary to have specialized equipment, which is often expensive to measure, or many sensors to arrange to obtain accurate results. Oktavia has used this approach in his research. They used five sensors combined with a spatial interpolation concept to control the temperature and humidity of the data center environment [1]. Riederer et al. presented the mathematical model choices suitable for studying the influence of sensor position in the construction of temperature field control [2]. C-Bam-bang-Dwi et al. researched an automatic intelligent wireless climate sensor button to control indoor temperature and humidity to improve the quality of life [3]. By using the same idea, Silveira et al. used a wireless sensor network to control room temperature [4]. Kumar et al. also developed a sensor button system, but unlike Silveira, they used the IEEE 1,451 standards to monitor room temperature [5]. Kim et al. developed an outdoor air temperature fault sensor for machine learning based air handler fault detection and diagnosis [6]. The model is applied to control the temperature of the outdoor air.
The second most common way is to investigate these fields through hypothetical mathematical models. Some prominent recent studies based on this idea include that of Ertuk et al., who used the theory of fractional analysis to study the motion of a beam on a bent nanowire [7]. Jajarmi et al. used the classical Lagrange method to study the complex displacement and charge of a microdynamics condenser system [8]. Most recently, Baleanu et al. used the structure of fractional and integral derivatives to investigate the general fractional model of COVID-19, studying the effects of isolation and quarantine [9]. Similarly, Jajarmi et al. investigated the asymptotic behavior of immune tumor dynamics using the general fractional model [10].
As mentioned above, temperature is one of many physical quantities associated with life around us. Therefore, the study of temperature field control has received the attention of many researchers. Piotr and Je Drysiak investigated the problem of heat conduction in a two-phase laminate made of microplates periodically distributed along one direction [11]. Francesco and Pierre-Louis investigated strategies to control nanoclusters’ shape change by varying the external environment’s optimal temperature [12]. Jiang et al. used the radial integration boundary element method in conjunction with a modified Levenberg-Marquardt algorithm to reconstruct the shape in transient thermal conduction problems [13]. Yang et al. studied the finite element electrothermal coupling method based on the radial point interpolation method (RPIM) to monitor the efficiency of thermoelectric coupling [14]. In this problem, Joule heat is often used as the sole heat source in the heat field, and the calculation of Joule heat depends on the intensity of the first-order variation of the electric field. Therefore, the idea of the study is to use the first-order continuous RPIM to interpolate variables in the survey domain. Feppon et al. used Hadamard’s method of shape differentiation to optimize the shape and topology for weakly coupled three physics problems, including heat propagation, fluid flow, and structural deformation [15]. Hobiny and Abbas used the finite element technique to study the thermal diffusion interaction in an unbound material with the cavity sphere in the context of a double-phase hysteresis model [16].
The general idea of thermal field research and control methods is to model the properties of the thermal field and use different algorithms that combine measurements at several key points to control the thermal field. Every model is an idealization of the real world; as George Box said, “All models are wrong, some are useful” [17]. One of the ideal solutions for modeling and controlling thermal field data is the use of the spatial shape function interpolation method. It is a method of estimating the value of unknown data points within the range of a discrete set containing several known data points with an estimated accuracy. The use of this method to control the temperature field has attracted the attention of many researchers. Wang et al. used the surface spline interpolation method with non-uniform thermal sensor placement to study and control the temperature in integrated circuits. The researchers experimented with reconstructing the full thermal status of a 16-core processor. [18]; Bullo et al. used quadratic interpolation to accurately calculate the thermal field distribution computation, especially in complex biological structures, which are easily encountered in predictions of heat distributions obtained in hyperthermic treatments [19]; and Thanh et al. used the shape function to compute the distribution for the temperature field. However, the reversibility problem has not been mentioned or solved yet [20]. Tang et al. uses continuous gradient smoothed GFEM (SGFEM) combined with a higher-order finite element shape function to solve the problems of heat transfer and thermoelectricity [21]. The higher-order finite element shape function ensures the continuity of the gradient between the elements. Through four typical numerical examples, including stable, transient, and thermoplastic heat transfer, the advantages of the method have been demonstrated in terms of accuracy, convergence rate, stability, and efficiency. Klimczak and Cecot used a multiscale finite element method (FEM) based on the particular shape function assessment model of steady-state heat transfer in heterogeneous materials. However, the result is still imperfect, and the method error is approximately 2% [22]. Most recently, Pucciarelli and Ambrosini used the shape function approach to predict degraded heat transfer to supercritical pressure fluids in nuclear reactors [23].
As summarized and analyzed above, it can be seen that all the research to control thermal field control has only addressed the one-dimensional problem (also known as the forward problem) without any research simultaneously solving the thermal field control for both forward and reverse problems. Specifically, the content of this reversibility problem will be detailed in Section 4. Therefore, supplementation of this deficiency reverse problem is the first motivation for the authors to carry out this study.
Furthermore, the precision of interpolation strongly depends on the continuity of the interpolated quantity, the density of the sample points, and especially the type of function used in the calculation process [1,18,19]. The error caused by the function form when interpolating is a method error. Determining the correct approximation function form is essential when the density of the sample points is not large enough. This is especially important when the cost of sampling is high. To the authors’ knowledge, other studies have yet to delve into comparative analysis to choose which approximation function form is the most suitable for thermal field interpolation. According to Thanh et al. [20], the theoretical shape function (TSF) is applied effectively to machine tool error interpolation, but there is no verification in the field of thermal interpolation. According to Hoe [24], the experimental shape function (ESF) has a rather complicated process, but what is the result compared to the TSF in solving the thermal field parameter control problem? Answering this question is the second motivation for the authors to carry out this research.
The content of this article focuses on the following aspects: First, to model a multisource field using a shape function method, namely the temperature field, design and implement experiments, and compare and verify the accuracy of TSF and ESF. Second, solve the problem of reversibility for the temperature field to find the coordinates of the points with a given intensity. Third, use the generalized reduced gradient algorithm (GRG) to find the temperature field’s maximum and minimum intensity points with high accuracy and stability.
The novelty of this article is the analysis of results from practical experiments to select the kind of shape function with high accuracy that is more suitable for the thermal control problem. In our previous articles, when applying the shape function method to model and graph the Wi-Fi wave field [25], based on experimental results, we also commented on the difference in results when using two kinds of shape function forms. However, the authors have yet to go into deep research and analysis to find the reasons for this deviation. Therefore, the authors continue to investigate and apply it to the heat transfer phenomenon to find the answer.
The second novelty is that it confirms which types of shape functions, with high accuracy and practical application, solve heat transfer issues in both forward and reverse directions. The research team also applies the GRG method to calculate the points with the maximum and minimum temperature intensity in quick time for high accuracy and stability, which is entirely feasible when applied in practice to control the thermal field.
The article is organized as follows: Section 2 introduces the concepts of the shape function, the TSF, and the ESF. Section 3 presents a case study on the temperature field’s design and experimentation for selecting the appropriate shape function form and discusses why there is a difference in accuracy between TSF and ESF. Next, forward and reverse problems of the physical field’s control and solutions are detailed in Section 4. Then, the temperature field experiment is again used to calculate the illustration of the control reversibility issue and compare and verify the design. Finally, Section 6 is the conclusion of this study and the proposal for further research.
2 TSF and ESF
2.1 Concept of a shape function
The shape function is the function that interpolates the solution between the discrete values obtained at the mesh nodes. This form of function is very commonly used in interpolation [26], and especially for FEM, the role of the shape function (also known as the trial function or the basis function) is essential. Depending on different problems, the shape function will have many different forms. Low-order polynomials are typically chosen as shape functions. The higher the order of the shape function, the more complex the shape of the element, the stronger the adaptability of the element, the fewer the number of elements needed to solve the interpolation problem, and the fewer balanced equations. Hence, the order of the balanced equations is lower, and it takes less time to solve the system of equations. However, when the order of the shape function is increased, the calculation of the discrete matrix becomes more complicated. Therefore, there is a most suitable order for each problem, which can make the total calculation time more economical. This generally needs to be determined based on the engineer’s computational experience.
Consider a field consisting of
Describe the influence of key points on the survey point through the shape function.
Let
where
At node
It can guarantee the continuity between adjacent units of the unknown quantity (
It should contain any linear term, and the element defined by it can only satisfy the constant strain condition.
There are two ways to determine the functions of the form
2.2 TSFs
For three-dimensional finite element simulations, it is convenient to discretize the simulation domain using tetrahedrons or boxes, as depicted in Figure 2.

The key points and reference systems in the survey area. (a) Tetrahedral original coordinate system, (b) tetrahedral transformed coordinate system, and (c) box finite elements.
In this article, the author presents the simulation domain of the survey area as a box. The tetrahedron is implemented similarly.
According to Hoe [24], the TSF for the eight key points of the box-shaped survey area is as follows:
The formula for transforming the axis to the reference system
where
It can be seen that the values
2.3 ESFs
The
Function
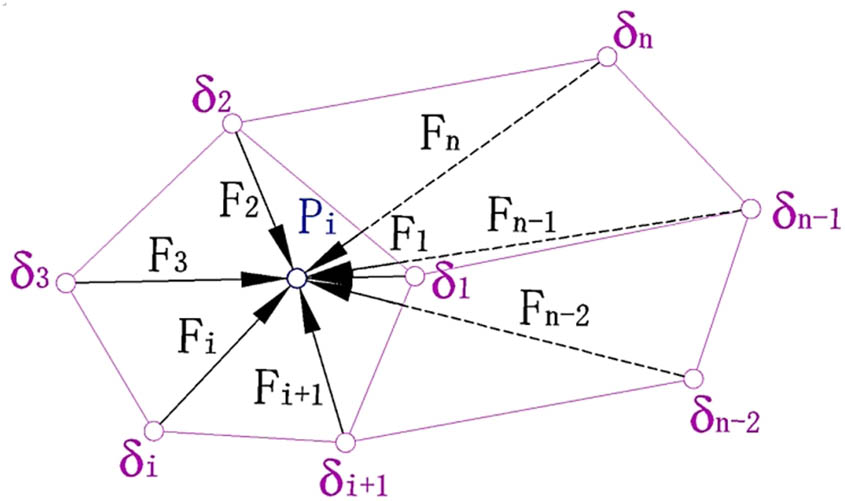
Suppose to investigate a point
The relationship of the intensity of known key points with the data components of the survey point
The influence coefficients of the ESF of
The general ESF cannot be determined by a single set of influence coefficients as Eq. (7). Therefore, it is necessary to investigate more than
After determining
3 Case study and select the appropriate shape function form
As analyzed above, there are two ways to determine the shape function for a physical field, but which type of function has higher accuracy and which type of function is more convenient to use? The content of this section will help us obtain the most suitable answer. It is easy to see that the interpolated value (Eq. (1)) calculated according to TSF (Eq. (2)) and ESF (Eq. (9)) with the same intensity survey key points will be difficult to equal. If we design an experiment to compare these two types of functions and independently verify the interpolation results, we will know the accuracy of each kind of function.
3.1 Experiment design
Design a box-shaped survey space as shown in Figure 2(c) with the following dimensions:
Two cooling fans are arranged at both ends of the greenhouse with a capacity of 2.5 W/unit.
Eight thermal sources were set up at eight peaks of the greenhouse model, using 10 W/bulb halogen bulbs to generate heat. The light bulb is constantly on and running at total capacity. Furthermore, eight temperature sensors are placed close to the eight peaks of the greenhouse model, which coincides with the location of eight thermal sources. This allows for continuous monitoring of the installed temperature.
Use an internal portable thermal sensor to measure the temperature at any point in the survey space to calculate and compare the interpolated results (Figure 3(a)).
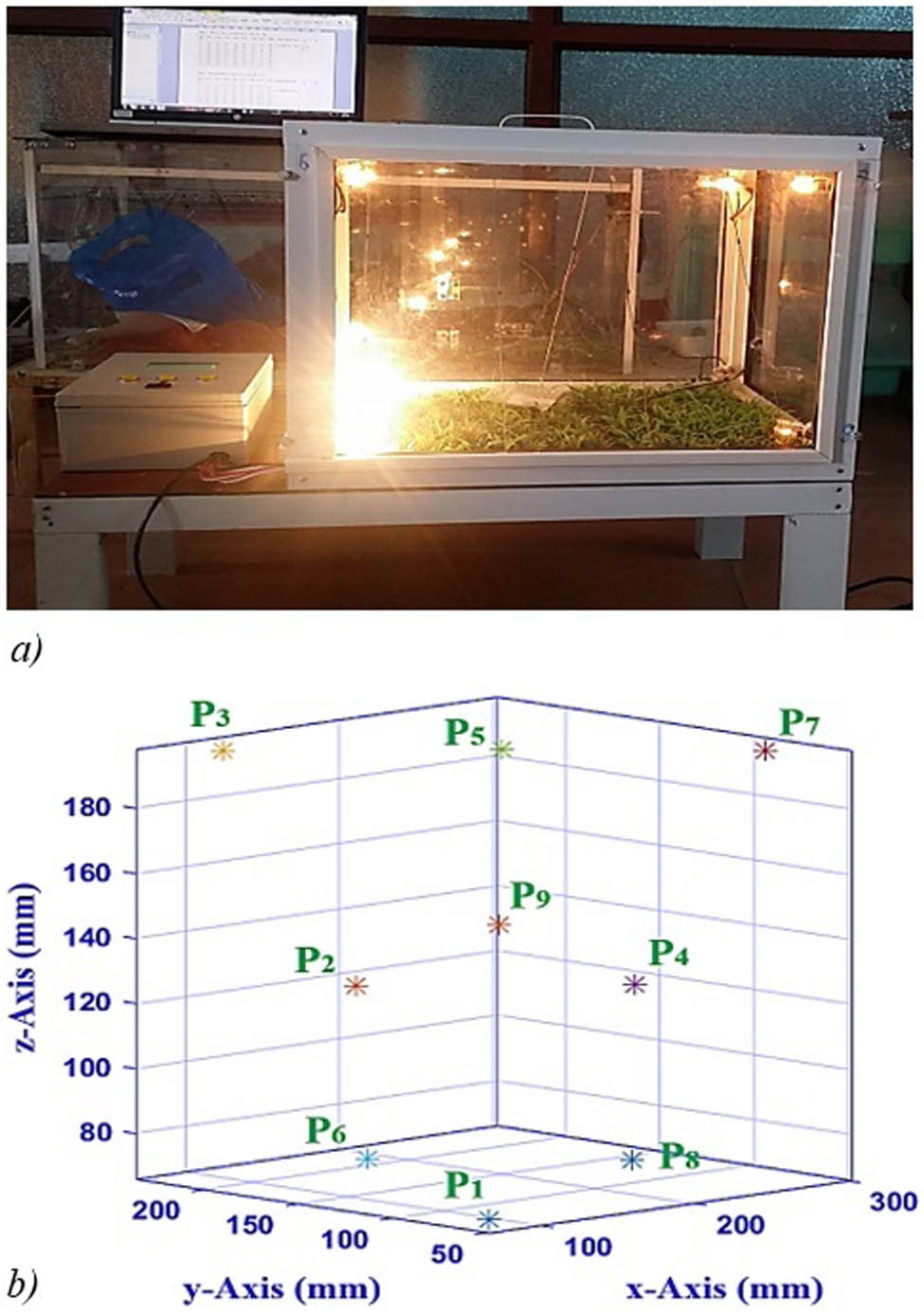
(a) Experimental model and (b) nine internal temperature survey points.
3.2 Measurement sensor
The LM35 sensor is a precision integrated circuit temperature device, and its robust construction makes it suitable for various environmental conditions. The output voltage is linearly proportional to the temperature in degrees Celsius. It does not require any external component to calibrate the circuit and has a typical accuracy of ±1/4°C at room temperature and ±3/4°C over a whole −55 to 155°C temperature range. It has an operating voltage of 4–30 V, and since the LM35 device draws only
The LM35 temperature sensor uses the basic principle of a diode to measure known temperature values. As we all know from semiconductor physics, the voltage across a diode increases at a known rate as the temperature increases. By accurately amplifying the voltage change, we can quickly generate a voltage signal directly proportional to the surrounding temperature. The internal schematic of the LM35 temperature sensor IC is according to the datasheet, as shown in Figure 4.
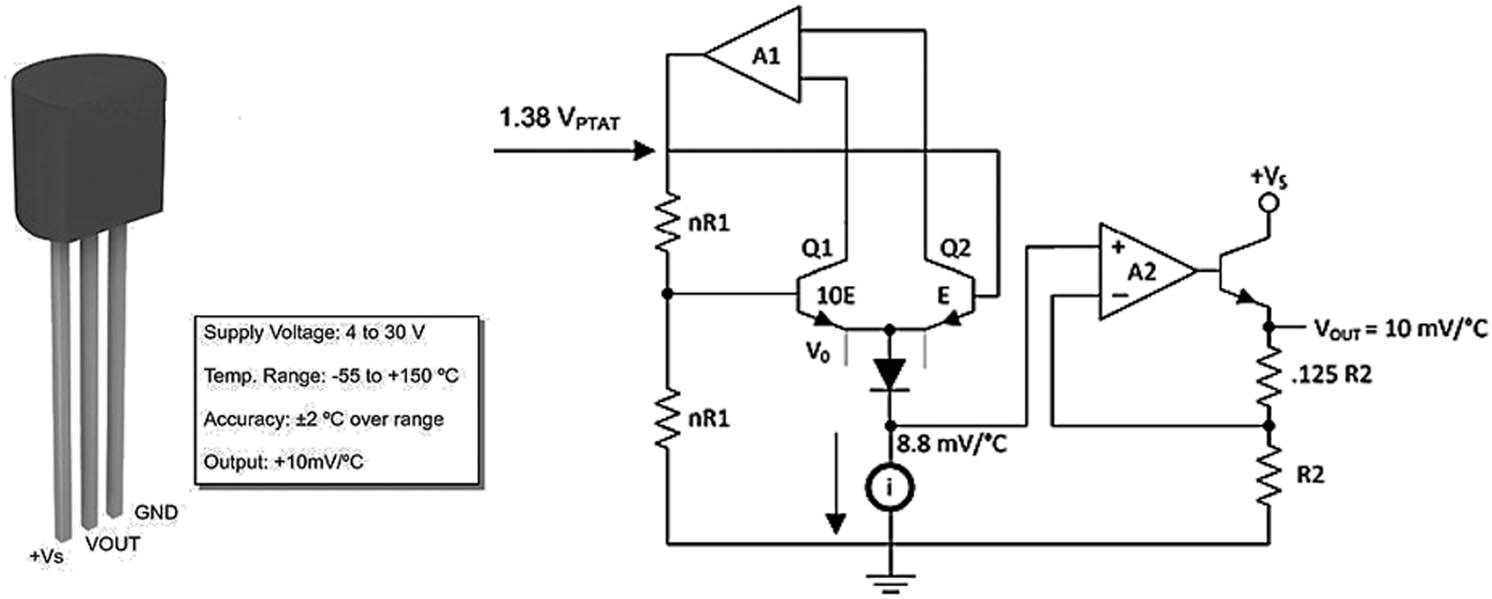
Temperature sensor used in the experiment.
Figure 5 is a circuit that displays temperature parameters using LM35 and Arduino UNO.

Circuit to display temperature parameters using LM35 and Arduino UNO.
With the above advantages and thermal errors, compared to the measurement using expensive thermal imaging cameras, the experiment using the LM35 temperature sensor with Arduino UNO completely meets the desired accuracy.
3.3 Experiment and results
Conduct a survey to measure the temperature at nine points
The interpolation results calculated according to TSF and ESF; the average experiment results and error of each function form
| Points |
|
|
|
TSF (°C) | ESF (°C) | The average experiment results (°C) | Error of TSF (%) | Error of ESF (%) |
|---|---|---|---|---|---|---|---|---|
| P1 | 95 | 71 | 66 | 33.72 | 31.09 | 31.12 | 7.71 | 0.1 |
| P2 | 95 | 142 | 132 | 35.5 | 31.3 | 31.64 | 10.87 | 1.09 |
| P3 | 95 | 213 | 198 | 35.81 | 30.38 | 30.14 | 15.83 | 0.79 |
| P4 | 190 | 71 | 132 | 35.26 | 31.35 | 31.66 | 10.21 | 0.99 |
| P5 | 190 | 142 | 198 | 36.06 | 32.54 | 32.76 | 9.15 | 0.68 |
| P6 | 190 | 213 | 66 | 34.73 | 31.48 | 31.4 | 9.59 | 0.25 |
| P7 | 275 | 71 | 198 | 35.76 | 31.9 | 31.72 | 11.3 | 0.56 |
| P8 | 275 | 142 | 66 | 36.2 | 31.26 | 31.55 | 12.85 | 0.93 |
| P9 | 275 | 213 | 132 | 33.05 | 31.4 | 31.23 | 5.51 | 0.54 |
| Average error | 10.34 | 0.66 | ||||||
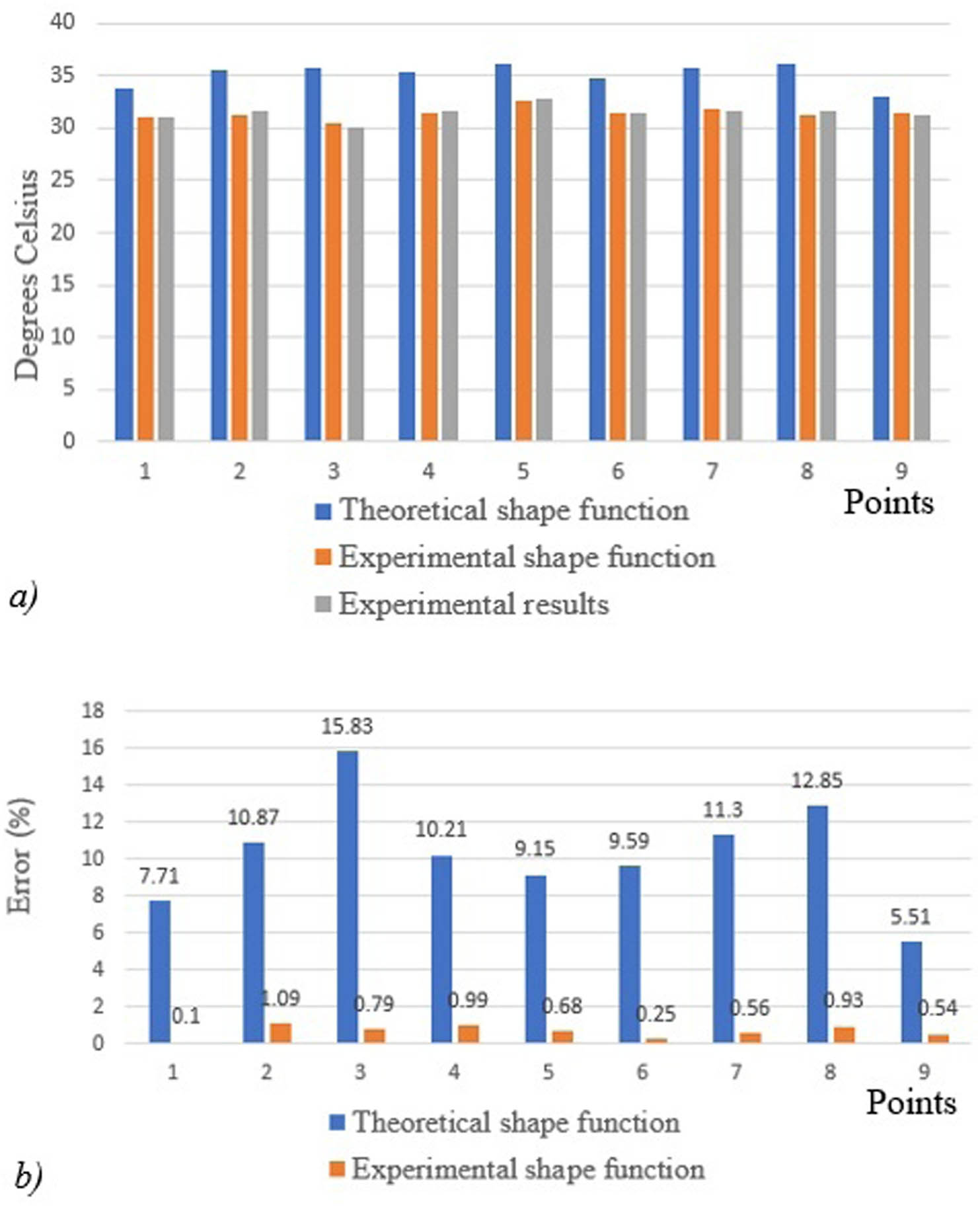
The interpolation results calculated according to TSF and ESF, compared with (a) experimental results and (b) accuracy of each function form.
3.4 Discussion
At the interpolation points in Figure 6, because no key points are shown, it can be seen that there is no overlap in values between TSF and ESF, which can be realized from the mathematical model as analyzed in Section 2.
The TSF exhibits symmetry in the interpolation spatial texture, which is very convenient to use due to its availability. However, in practice, the key points are not always symmetrically arranged in the survey space, and not all fields are symmetrical in the influence region. Moreover, the experimental results show that, in the same field of influence under the same conditions, the accuracy of the ESF (an error of 0.66%) is always superior to that of the TSF (an error of 10.34%). The results will always be the same at the measurement sampling points. Therefore, it can be seen that the error is due to using an incorrect calculation functional form.
4 Forward and reverse problems of the physical field’s control
In Section 3, it was proved that the field model using ESF would give results with higher accuracy than TSF. After determining the general expression of the shape functions from Eq. (9), this mathematical model will have two reversible problems.
4.1 Forward problem
Given each key point’s coordinates and parametric intensity, determine the parameter intensity at any given point.
The manner to solve the forward problem is as follows: to know the coordinates of a point
4.2 Reverse problem
Given each key point’s coordinates and parametric intensity, find the coordinates of the points with a given intensity and the field’s maximum and minimum parameter strengths.
The way to solve the reverse problem is as follows: as shown in Figure 1, when
The problem requires determining a point or a set of points with an intensity
Let the point
The expanded form of this expression is as follows:
The problem is converted to the equivalent form using the GRG [27] method as Eq. (13):
The solution of problem Eq. (13) is the set of points
5 Case study with temperature problem
Return to the temperature-space survey as illustrated in Section 3. Assume that these heat sources are always constant and equal to the preset value (no loss in heat exchange with the environment) and that the sampling time is long enough for good heat transfer. Conduct experiments at any eight points in the survey space to build a system of equations to determine the influence coefficients of the ESF such as Eq. (7). The results are presented in Table 2.
Relationship between the survey point and the influence coefficient in the stationary state
|
|
|
|
F1 | F2 | F3 | F4 | F5 | F6 | F7 | F8 |
|---|---|---|---|---|---|---|---|---|---|---|
| 125 | 100 | 0 | 0.189 | 0.0792 | 0.1933 | 0.5619 | 0.0024 | −0.0095 | −0.0033 | −0.0059 |
| 375 | 300 | 0 | 0.1929 | 0.5603 | 0.1869 | 0.0602 | −0.0011 | 0.0014 | −0.0001 | 0.0002 |
| 375 | 300 | −380 | 0.0002 | 0.0002 | −0.0006 | −0.0004 | 0.1881 | 0.5626 | 0.1871 | 0.0624 |
| 125 | 100 | −380 | 0.002 | 0 | 0 | 0 | 0.187 | 0.062 | 0.188 | 0.562 |
| 250 | 200 | −280 | 0.0671 | 0.0679 | 0.0676 | 0.063 | 0.1838 | 0.1829 | 0.1836 | 0.1854 |
| 250 | 200 | −122.97 | 0.169 | 0.1677 | 0.1692 | 0.1688 | 0.0841 | 0.082 | 0.0792 | 0.0817 |
| 166.67 | 266.67 | −266 | 0.0334 | 0.0666 | 0.1334 | 0.0657 | 0.078 | 0.1559 | 0.3116 | 0.1555 |
| 333.33 | 133.33 | −190 | 0.2209 | 0.1094 | 0.0557 | 0.1105 | 0.224 | 0.1129 | 0.0543 | 0.1118 |
Using OriginLab software, determine the regression functions as Eq. (9) to add the combined effects
Shape functions obtained after regression
| Fi | Shape functions |
|---|---|
| F1 |
|
| F2 |
|
| F3 |
|
| F4 |
|
| F5 |
|
| F6 |
|
| F7 |
|
| F8 |
|
5.1 Forward problem
According to the diagram in Figure 7, the temperature arranged at each source has an intensity as shown in Table 4.

Set of eight thermal points sources and nine points of interpolation calculation.
Heat intensity at each source (assuming no loss)
| Points |
|
|
|
|
|---|---|---|---|---|
| P1 | 500 | 0 | 0 | 15 |
| P2 | 500 | 400 | 0 | 15.5 |
| P3 | 0 | 400 | 0 | 26 |
| P4 | 0 | 0 | 0 | 30 |
| P5 | 500 | 0 | −380 | 12 |
| P6 | 500 | 400 | −380 | 19 |
| P7 | 0 | 400 | −380 | 35 |
| P8 | 0 | 0 | −380 | 7 |
Survey nine points with given coordinates
Theoretical computation of the forward problem and experiments result
| Survey point |
|
|
|
Computational interpolation value (°C) | Verification measurement (°C) | Error (%) |
|---|---|---|---|---|---|---|
| P1 | 450 | 40 |
|
16.0955 | 16.36 | 1.64 |
| P2 | 400 | 80 |
|
16.984 | 16.79 | 1.14 |
| P3 | 350 | 120 |
|
17.8185 | 17.55 | 1.51 |
| P4 | 300 | 160 |
|
18.752 | 18.47 | 1.5 |
| P5 | 250 | 200 |
|
19.9375 | 19.66 | 1.39 |
| P6 | 200 | 240 |
|
21.528 | 21.78 | 1.17 |
| P7 | 150 | 280 |
|
23.6765 | 23.43 | 1.04 |
| P8 | 100 | 320 |
|
26.536 | 26.75 | 0.81 |
| P9 | 50 | 360 |
|
30.2595 | 30.4 | 0.46 |
5.2 Inverse problem
Assuming you need to locate the coordinates of the points with a temperature as shown in Table 6, in the survey field as presented in the forward problem. According to Eq. (13), the optimization problem has the following form:
Theoretical computation of the inverse problem and experiments result
| Point |
|
|
|
Optimum function value | Theoretical temperature | The average experiment results (°C) | Error (%) |
|---|---|---|---|---|---|---|---|
| P1 | 168.75 | 17.98 |
|
|
16.5 | 16.65 | 0.91 |
| P2 | 450.1 | 152.03 |
|
|
16 | 15.9 | 0.62 |
| P3 | 194.4 | 4.96 |
|
|
18 | 17.85 | 0.83 |
| P4 | 167.11 | 68.21 |
|
|
20 | 20.25 | 1.25 |
| P5 | 162.02 | 5.041 |
|
|
22 | 22.25 | 1.14 |
| P6 | 116.75 | 5.06 |
|
|
24 | 23.85 | 0.62 |
| P7 | 76.17 | 5.08 |
|
|
26 | 25.83 | 0.65 |
| P8 | 157.64 | 209.11 |
|
|
29 | 28.85 | 0.52 |
| P9 | 2.26 | 0.9 |
|
|
30 | 29.75 | 0.83 |
Using the GRG method [27] to solve the above inverse problem, find the coordinates of the points with the required temperature in the survey area. Then, conduct the actual temperature measurement experiment to verify. The theoretical calculation result and the average results after ten times of experiments measurements, and the error result of the inverse problem are shown in Table 6.
Scanning the
The result of minimum and maximum temperature values of the thermal field
| Point |
|
|
|
Optimum function value | Theoretical temperature (°C) | Average experiments result (°C) |
|---|---|---|---|---|---|---|
| Temperature min | 500 | 399.99 |
|
|
13.9 | 13.99 |
| Temperature max | 500 | 399.87 |
|
|
54.5 | 54.15 |
It can be seen that the minimum temperature limit (13.9°C) is greater than the minimum heat value at source number 8 (7°C), and the maximum temperature value (54.5°C) is larger than the maximum value of the heat source at source 7 (35°C) can be provided. These are the limits where this heat field’s min and max temperature thresholds remain the same even with more extended heat exchange. This will not happen if the thermal sources lose heat that due to heat exchange with the surrounding environment. The model we propose here is not an isolated system. Instead, it is constantly energized so that the thermal sources maintain stability at the initial set value and do not control the thermal parameter feedback from the surveying environment. When thermal sources are not energized to maintain initial intensity, knowing their cooling law will solve the problem Eq. (13) by simply adding constraints to the mathematical model. However, in this case, the maximum and minimum temperatures received will differ from the experimental results discussed above.
6 Conclusion
Temperature monitoring and control are important problems in heat transfer, drying, kiln, etc. Due to the object’s physical aspects to be monitored and the properties of temperature and environment, the control field requires multiple sensors to obtain accurate thermal data. The arrangement of the number of thermal sensors is limited in practice, so spatial interpolation using shape function form is an ideal solution to predict and control thermal data without needing additional sensors, as is customary. Most previous research was only related to monitoring and evaluating the performance of the interpolation space without performing control and finding the points with minimum or maximum temperature in that space.
This article uses the shape function technique to model the spatially interpolated field. The authors have evaluated the performance of TSF and ESF techniques based on the same thermal transfer model in closed space. The experimental results show that under the same conditions, ESFs (with an error of 0.66%) give better results than the TSFs (with an error of 10.34%) because the parameter field in practice is not always as ideally symmetric as the TSFs form. This result also coincides with the opinion of the research team when applying the shape function method to model and graph the Wi-Fi wave field in another published article [25]. Although the ESFs may have a higher setup cost due to the higher sampling cost, they are well worth the accuracy of the results they bring.
As presented in the article, the mathematical model, methods, and tools allow the determination of the parameter intensity coordinate relationship between the node points and the control point in two reversible directions. In addition, it also allows for determining the maximum and minimum values of parameter intensity over the entire survey field. This is another innovation of this study that other researchers have not yet mentioned. With different types of parameters, the survey of spaces with different shapes and sizes needs to redefine the shape function form of the space itself. The technique implemented is the same as in this article.
However, quantities with a wave nature, such as light, sound, the superposition principle, and interference, take place entirely differently than temperature, so the application of the model proposed here is no longer accurate. These topics are not within the scope of this article. Therefore, this content is also the next research direction for the research team.
Acknowledgments
The authors would like to acknowledge the Postdoctoral Science Foundation of China (Grant No. 2021M703780).
-
Funding information: Postdoctoral Science Foundation of China (Grant No. 2021M703780).
-
Author contributions: All authors have accepted responsibility for the entire content of this manuscript and approved its submission.
-
Conflict of interest: The authors state no conflict of interest.
References
[1] Oktavia E, Mustika IW. Inverse distance weighting and kriging spatial interpolation for data center thermal monitoring. Proc. 1st Int. Conf. Inf. Technol. Inf. Syst. Electr. Eng. ICITISEE; 2016. p. 69–74. 10.1109/ICITISEE.2016.7803050Search in Google Scholar
[2] Riederer P, Marchio D, Visier JC. Influence of sensor position in building thermal control: criteria for zone models. Energy Buildings. 2002;34(8):785–98. 10.1016/S0378-7788(02)00097-XSearch in Google Scholar
[3] C-Bam-bang-Dwi K, Permana A, Asyikin M, Adristi C. Smart wireless climate sensor node for indoor comfort quality monitoring application. Energies. 2022;15:29–39. 10.3390/en15082939Search in Google Scholar
[4] Silveira E, Bonho S. Temperature monitoring through wireless sensor network using an 802.15.4/802.11 gateway. IFAC-PapersOnLine. 2016;49(30):120–5. 10.1016/j.ifacol.2016.11.139Search in Google Scholar
[5] Kumar A, Hancke G. An energy-efficient smart comfort sensing system based on the IEEE 1451 standard for green buildings. IEEE Sens J. 2014;14:4245–52. 10.1109/JSEN.2014.2356651Search in Google Scholar
[6] Kim C, Lee S, Park K, Lee KH. Analysis of thermal environment and energy performance by biased economizer outdoor air temperature sensor fault. J Mech Sci Technol. 2022;36:2083–94. 10.1007/s12206-022-0342-0Search in Google Scholar
[7] Erturk VS, Godwe E, Baleanu D, Kumar P, Asad J, Jajarmi A. Novel fractional-order Lagrangian to describe motion of beam on nanowire. Acta Physica Polonica A. 2021;140(3):265–72. 10.12693/APhysPolA.140.265Search in Google Scholar
[8] Jajarmi A, Baleanu D, Zarghami Vahid K, Mohammadi Pirouz H, Asad JH. A new and general fractional Lagrangian approach: a capacitor microphone case study. Results Phys. 2021;31:104950. 10.1016/j.rinp.2021.104950Search in Google Scholar
[9] Baleanu D, Hassan Abadi M, Jajarmi A, Zarghami Vahid K, Nieto JJ. Nieto. A new comparative study on the general fractional model of COVID-19 with isolation and quarantine effects. Alexandr Eng J. 2022;61(6):4779–91. 10.1016/j.aej.2021.10.030Search in Google Scholar
[10] Jajarmi A, Baleanu D, Vahid K, Mobayen S. A general fractional formulation and tracking control for immunogenic tumor dynamics. Math Meth Appl Sci. 2022;45(2):667–80. 10.1002/mma.7804Search in Google Scholar
[11] Piotr O, Je Drysiak J. Heat conduction in periodic laminates with probabilistic distribution of material properties. Heat Mass Transfer. 2017;53:1425–37. 10.1007/s00231-016-1908-0Search in Google Scholar
[12] Francesco B, Pierre-Louis O. Controlling the shape of small clusters with and without macroscopic fields. Phys Rev Lett. 2022;128:256102. 10.1103/PhysRevLett.128.256102Search in Google Scholar PubMed
[13] Jiang GH, Tan CH, Jiang WW, Yang K, Wang WZ, Gao XW. Shape reconstruction in transient heat conduction problems based on radial integration boundary element method. Int J Heat Mass Transfer. 2022;191(1):122830. 10.1016/j.ijheatmasstransfer.2022.122830Search in Google Scholar
[14] Yang Y, Qiao M, Zheng W, Li Z. Improved finite element method based on radial point interpolation method (RPIM) for electro-thermal coupling. Energy Reports. 2022;8(5):1322–30. 10.1016/j.egyr.2022.02.215Search in Google Scholar
[15] Feppon F, Allaire G, Bordeu F, Cortial J, Dapogny C. Shape optimization of a coupled thermal fluid-structure problem in a level set mesh evolution framework. SeMA J Boletin de la Sociedad Española de Matemática Aplicada. 2019;76(3):413–58. 10.1007/s40324-018-00185-4Search in Google Scholar
[16] Hobiny AD, Abbas IA. Finite element analysis of thermal-diffusions problem for unbounded elastic medium containing spherical cavity under DPL model. Mathematics. 2021;9(21):1–11. 10.3390/math9212782Search in Google Scholar
[17] Felippa CA. Introduction to finite element methods. Boulder, USA: University of Colorado; 2004. p. 1–10. Search in Google Scholar
[18] Wang R-L, Li X, Liu W-J, Liu T, Rong M-T, Zhou L. Surface spline interpolation method for thermal reconstruction with limited sensor data of non-uniform placements. J Shanghai Jiaotong Univ. 2014;19(1):65–71. 10.1007/s12204-013-1469-zSearch in Google Scholar
[19] Bullo M, D’Ambrosio V, Dughiero F, Guarnieri M. Coupled electrical and thermal transient conduction problems with a quadratic interpolation cell method approach. IEEE Trans Magn. 2006;42(4):1003–6. 10.1109/TMAG.2006.872471Search in Google Scholar
[20] Thanh LP, Thu TL, Huu TN. Determining the parameter area at the request of a physical field based on shape function technique. International Conference on Engineering Research and Applications ICERA. Thai Nguyen, Vietnam, ICERA; vol. 63. 2018. p. 270–7. 10.1007/978-3-030-04792-4_36Search in Google Scholar
[21] Tang J, Qian L, Chen G. A gradient continuous smoothed GFEM for heat transfer and thermoelasticity analyses. Acta Mech. 2021;232:3737–65. 10.1007/s00707-021-03018-0Search in Google Scholar
[22] Klimczak M, Cecot W. Higher order multiscale finite element method for heat transfer modeling. Materials. 2021;14:3827. 10.3390/ma14143827Search in Google Scholar PubMed PubMed Central
[23] Pucciarelli A, Ambrosini W. A shape function approach for predicting deteriorated heat transfer to supercritical pressure fluids on account of a thermal entry length phenomenon. Nuclear Eng Design. 2022;397:111923. 10.1016/j.nucengdes.2022.111923Search in Google Scholar
[24] Hoe N-D. Volumetric error compensation for multi-axis machine by using shape function interpolation. J Sci Technol Tech Univ. Vietnam, 2004;48–9. Search in Google Scholar
[25] Trang T, Pham T, Hu Y, Li W, Lin S. Modelling and and graphing the Wi-Fi wave field using the shape function. Open Phys. 2022;20:1–7. 10.1515/phys-2022-0196Search in Google Scholar
[26] Zienkiewicz OC, Taylor RL, Zhu JZ. The finite element method: its basis and fundamentals-Chapter 6 : Shape Functions. Derivatives and Integration. Jordan Hill, Oxford: Elsevier Butterworth-Heinemann Linacre House; 2013. 10.1016/B978-1-85617-633-0.00006-XSearch in Google Scholar
[27] Trang TT, Li WG, Pham TL. Method to solve the kinematic problems of parallel robots using generalized reduced gradient algorithm. J Robotics Mechatronic. 2016;28(3):404–17. 10.20965/jrm.2016.p0404Search in Google Scholar
© 2023 the author(s), published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Regular Articles
- Dynamic properties of the attachment oscillator arising in the nanophysics
- Parametric simulation of stagnation point flow of motile microorganism hybrid nanofluid across a circular cylinder with sinusoidal radius
- Fractal-fractional advection–diffusion–reaction equations by Ritz approximation approach
- Behaviour and onset of low-dimensional chaos with a periodically varying loss in single-mode homogeneously broadened laser
- Ammonia gas-sensing behavior of uniform nanostructured PPy film prepared by simple-straightforward in situ chemical vapor oxidation
- Analysis of the working mechanism and detection sensitivity of a flash detector
- Flat and bent branes with inner structure in two-field mimetic gravity
- Heat transfer analysis of the MHD stagnation-point flow of third-grade fluid over a porous sheet with thermal radiation effect: An algorithmic approach
- Weighted survival functional entropy and its properties
- Bioconvection effect in the Carreau nanofluid with Cattaneo–Christov heat flux using stagnation point flow in the entropy generation: Micromachines level study
- Study on the impulse mechanism of optical films formed by laser plasma shock waves
- Analysis of sweeping jet and film composite cooling using the decoupled model
- Research on the influence of trapezoidal magnetization of bonded magnetic ring on cogging torque
- Tripartite entanglement and entanglement transfer in a hybrid cavity magnomechanical system
- Compounded Bell-G class of statistical models with applications to COVID-19 and actuarial data
- Degradation of Vibrio cholerae from drinking water by the underwater capillary discharge
- Multiple Lie symmetry solutions for effects of viscous on magnetohydrodynamic flow and heat transfer in non-Newtonian thin film
- Thermal characterization of heat source (sink) on hybridized (Cu–Ag/EG) nanofluid flow via solid stretchable sheet
- Optimizing condition monitoring of ball bearings: An integrated approach using decision tree and extreme learning machine for effective decision-making
- Study on the inter-porosity transfer rate and producing degree of matrix in fractured-porous gas reservoirs
- Interstellar radiation as a Maxwell field: Improved numerical scheme and application to the spectral energy density
- Numerical study of hybridized Williamson nanofluid flow with TC4 and Nichrome over an extending surface
- Controlling the physical field using the shape function technique
- Significance of heat and mass transport in peristaltic flow of Jeffrey material subject to chemical reaction and radiation phenomenon through a tapered channel
- Complex dynamics of a sub-quadratic Lorenz-like system
- Stability control in a helicoidal spin–orbit-coupled open Bose–Bose mixture
- Research on WPD and DBSCAN-L-ISOMAP for circuit fault feature extraction
- Simulation for formation process of atomic orbitals by the finite difference time domain method based on the eight-element Dirac equation
- A modified power-law model: Properties, estimation, and applications
- Bayesian and non-Bayesian estimation of dynamic cumulative residual Tsallis entropy for moment exponential distribution under progressive censored type II
- Computational analysis and biomechanical study of Oldroyd-B fluid with homogeneous and heterogeneous reactions through a vertical non-uniform channel
- Predictability of machine learning framework in cross-section data
- Chaotic characteristics and mixing performance of pseudoplastic fluids in a stirred tank
- Isomorphic shut form valuation for quantum field theory and biological population models
- Vibration sensitivity minimization of an ultra-stable optical reference cavity based on orthogonal experimental design
- Effect of dysprosium on the radiation-shielding features of SiO2–PbO–B2O3 glasses
- Asymptotic formulations of anti-plane problems in pre-stressed compressible elastic laminates
- A study on soliton, lump solutions to a generalized (3+1)-dimensional Hirota--Satsuma--Ito equation
- Tangential electrostatic field at metal surfaces
- Bioconvective gyrotactic microorganisms in third-grade nanofluid flow over a Riga surface with stratification: An approach to entropy minimization
- Infrared spectroscopy for ageing assessment of insulating oils via dielectric loss factor and interfacial tension
- Influence of cationic surfactants on the growth of gypsum crystals
- Study on instability mechanism of KCl/PHPA drilling waste fluid
- Analytical solutions of the extended Kadomtsev–Petviashvili equation in nonlinear media
- A novel compact highly sensitive non-invasive microwave antenna sensor for blood glucose monitoring
- Inspection of Couette and pressure-driven Poiseuille entropy-optimized dissipated flow in a suction/injection horizontal channel: Analytical solutions
- Conserved vectors and solutions of the two-dimensional potential KP equation
- The reciprocal linear effect, a new optical effect of the Sagnac type
- Optimal interatomic potentials using modified method of least squares: Optimal form of interatomic potentials
- The soliton solutions for stochastic Calogero–Bogoyavlenskii Schiff equation in plasma physics/fluid mechanics
- Research on absolute ranging technology of resampling phase comparison method based on FMCW
- Analysis of Cu and Zn contents in aluminum alloys by femtosecond laser-ablation spark-induced breakdown spectroscopy
- Nonsequential double ionization channels control of CO2 molecules with counter-rotating two-color circularly polarized laser field by laser wavelength
- Fractional-order modeling: Analysis of foam drainage and Fisher's equations
- Thermo-solutal Marangoni convective Darcy-Forchheimer bio-hybrid nanofluid flow over a permeable disk with activation energy: Analysis of interfacial nanolayer thickness
- Investigation on topology-optimized compressor piston by metal additive manufacturing technique: Analytical and numeric computational modeling using finite element analysis in ANSYS
- Breast cancer segmentation using a hybrid AttendSeg architecture combined with a gravitational clustering optimization algorithm using mathematical modelling
- On the localized and periodic solutions to the time-fractional Klein-Gordan equations: Optimal additive function method and new iterative method
- 3D thin-film nanofluid flow with heat transfer on an inclined disc by using HWCM
- Numerical study of static pressure on the sonochemistry characteristics of the gas bubble under acoustic excitation
- Optimal auxiliary function method for analyzing nonlinear system of coupled Schrödinger–KdV equation with Caputo operator
- Analysis of magnetized micropolar fluid subjected to generalized heat-mass transfer theories
- Does the Mott problem extend to Geiger counters?
- Stability analysis, phase plane analysis, and isolated soliton solution to the LGH equation in mathematical physics
- Effects of Joule heating and reaction mechanisms on couple stress fluid flow with peristalsis in the presence of a porous material through an inclined channel
- Bayesian and E-Bayesian estimation based on constant-stress partially accelerated life testing for inverted Topp–Leone distribution
- Dynamical and physical characteristics of soliton solutions to the (2+1)-dimensional Konopelchenko–Dubrovsky system
- Study of fractional variable order COVID-19 environmental transformation model
- Sisko nanofluid flow through exponential stretching sheet with swimming of motile gyrotactic microorganisms: An application to nanoengineering
- Influence of the regularization scheme in the QCD phase diagram in the PNJL model
- Fixed-point theory and numerical analysis of an epidemic model with fractional calculus: Exploring dynamical behavior
- Computational analysis of reconstructing current and sag of three-phase overhead line based on the TMR sensor array
- Investigation of tripled sine-Gordon equation: Localized modes in multi-stacked long Josephson junctions
- High-sensitivity on-chip temperature sensor based on cascaded microring resonators
- Pathological study on uncertain numbers and proposed solutions for discrete fuzzy fractional order calculus
- Bifurcation, chaotic behavior, and traveling wave solution of stochastic coupled Konno–Oono equation with multiplicative noise in the Stratonovich sense
- Thermal radiation and heat generation on three-dimensional Casson fluid motion via porous stretching surface with variable thermal conductivity
- Numerical simulation and analysis of Airy's-type equation
- A homotopy perturbation method with Elzaki transformation for solving the fractional Biswas–Milovic model
- Heat transfer performance of magnetohydrodynamic multiphase nanofluid flow of Cu–Al2O3/H2O over a stretching cylinder
- ΛCDM and the principle of equivalence
- Axisymmetric stagnation-point flow of non-Newtonian nanomaterial and heat transport over a lubricated surface: Hybrid homotopy analysis method simulations
- HAM simulation for bioconvective magnetohydrodynamic flow of Walters-B fluid containing nanoparticles and microorganisms past a stretching sheet with velocity slip and convective conditions
- Coupled heat and mass transfer mathematical study for lubricated non-Newtonian nanomaterial conveying oblique stagnation point flow: A comparison of viscous and viscoelastic nanofluid model
- Power Topp–Leone exponential negative family of distributions with numerical illustrations to engineering and biological data
- Extracting solitary solutions of the nonlinear Kaup–Kupershmidt (KK) equation by analytical method
- A case study on the environmental and economic impact of photovoltaic systems in wastewater treatment plants
- Application of IoT network for marine wildlife surveillance
- Non-similar modeling and numerical simulations of microploar hybrid nanofluid adjacent to isothermal sphere
- Joint optimization of two-dimensional warranty period and maintenance strategy considering availability and cost constraints
- Numerical investigation of the flow characteristics involving dissipation and slip effects in a convectively nanofluid within a porous medium
- Spectral uncertainty analysis of grassland and its camouflage materials based on land-based hyperspectral images
- Application of low-altitude wind shear recognition algorithm and laser wind radar in aviation meteorological services
- Investigation of different structures of screw extruders on the flow in direct ink writing SiC slurry based on LBM
- Harmonic current suppression method of virtual DC motor based on fuzzy sliding mode
- Micropolar flow and heat transfer within a permeable channel using the successive linearization method
- Different lump k-soliton solutions to (2+1)-dimensional KdV system using Hirota binary Bell polynomials
- Investigation of nanomaterials in flow of non-Newtonian liquid toward a stretchable surface
- Weak beat frequency extraction method for photon Doppler signal with low signal-to-noise ratio
- Electrokinetic energy conversion of nanofluids in porous microtubes with Green’s function
- Examining the role of activation energy and convective boundary conditions in nanofluid behavior of Couette-Poiseuille flow
- Review Article
- Effects of stretching on phase transformation of PVDF and its copolymers: A review
- Special Issue on Transport phenomena and thermal analysis in micro/nano-scale structure surfaces - Part IV
- Prediction and monitoring model for farmland environmental system using soil sensor and neural network algorithm
- Special Issue on Advanced Topics on the Modelling and Assessment of Complicated Physical Phenomena - Part III
- Some standard and nonstandard finite difference schemes for a reaction–diffusion–chemotaxis model
- Special Issue on Advanced Energy Materials - Part II
- Rapid productivity prediction method for frac hits affected wells based on gas reservoir numerical simulation and probability method
- Special Issue on Novel Numerical and Analytical Techniques for Fractional Nonlinear Schrodinger Type - Part III
- Adomian decomposition method for solution of fourteenth order boundary value problems
- New soliton solutions of modified (3+1)-D Wazwaz–Benjamin–Bona–Mahony and (2+1)-D cubic Klein–Gordon equations using first integral method
- On traveling wave solutions to Manakov model with variable coefficients
- Rational approximation for solving Fredholm integro-differential equations by new algorithm
- Special Issue on Predicting pattern alterations in nature - Part I
- Modeling the monkeypox infection using the Mittag–Leffler kernel
- Spectral analysis of variable-order multi-terms fractional differential equations
- Special Issue on Nanomaterial utilization and structural optimization - Part I
- Heat treatment and tensile test of 3D-printed parts manufactured at different build orientations
Articles in the same Issue
- Regular Articles
- Dynamic properties of the attachment oscillator arising in the nanophysics
- Parametric simulation of stagnation point flow of motile microorganism hybrid nanofluid across a circular cylinder with sinusoidal radius
- Fractal-fractional advection–diffusion–reaction equations by Ritz approximation approach
- Behaviour and onset of low-dimensional chaos with a periodically varying loss in single-mode homogeneously broadened laser
- Ammonia gas-sensing behavior of uniform nanostructured PPy film prepared by simple-straightforward in situ chemical vapor oxidation
- Analysis of the working mechanism and detection sensitivity of a flash detector
- Flat and bent branes with inner structure in two-field mimetic gravity
- Heat transfer analysis of the MHD stagnation-point flow of third-grade fluid over a porous sheet with thermal radiation effect: An algorithmic approach
- Weighted survival functional entropy and its properties
- Bioconvection effect in the Carreau nanofluid with Cattaneo–Christov heat flux using stagnation point flow in the entropy generation: Micromachines level study
- Study on the impulse mechanism of optical films formed by laser plasma shock waves
- Analysis of sweeping jet and film composite cooling using the decoupled model
- Research on the influence of trapezoidal magnetization of bonded magnetic ring on cogging torque
- Tripartite entanglement and entanglement transfer in a hybrid cavity magnomechanical system
- Compounded Bell-G class of statistical models with applications to COVID-19 and actuarial data
- Degradation of Vibrio cholerae from drinking water by the underwater capillary discharge
- Multiple Lie symmetry solutions for effects of viscous on magnetohydrodynamic flow and heat transfer in non-Newtonian thin film
- Thermal characterization of heat source (sink) on hybridized (Cu–Ag/EG) nanofluid flow via solid stretchable sheet
- Optimizing condition monitoring of ball bearings: An integrated approach using decision tree and extreme learning machine for effective decision-making
- Study on the inter-porosity transfer rate and producing degree of matrix in fractured-porous gas reservoirs
- Interstellar radiation as a Maxwell field: Improved numerical scheme and application to the spectral energy density
- Numerical study of hybridized Williamson nanofluid flow with TC4 and Nichrome over an extending surface
- Controlling the physical field using the shape function technique
- Significance of heat and mass transport in peristaltic flow of Jeffrey material subject to chemical reaction and radiation phenomenon through a tapered channel
- Complex dynamics of a sub-quadratic Lorenz-like system
- Stability control in a helicoidal spin–orbit-coupled open Bose–Bose mixture
- Research on WPD and DBSCAN-L-ISOMAP for circuit fault feature extraction
- Simulation for formation process of atomic orbitals by the finite difference time domain method based on the eight-element Dirac equation
- A modified power-law model: Properties, estimation, and applications
- Bayesian and non-Bayesian estimation of dynamic cumulative residual Tsallis entropy for moment exponential distribution under progressive censored type II
- Computational analysis and biomechanical study of Oldroyd-B fluid with homogeneous and heterogeneous reactions through a vertical non-uniform channel
- Predictability of machine learning framework in cross-section data
- Chaotic characteristics and mixing performance of pseudoplastic fluids in a stirred tank
- Isomorphic shut form valuation for quantum field theory and biological population models
- Vibration sensitivity minimization of an ultra-stable optical reference cavity based on orthogonal experimental design
- Effect of dysprosium on the radiation-shielding features of SiO2–PbO–B2O3 glasses
- Asymptotic formulations of anti-plane problems in pre-stressed compressible elastic laminates
- A study on soliton, lump solutions to a generalized (3+1)-dimensional Hirota--Satsuma--Ito equation
- Tangential electrostatic field at metal surfaces
- Bioconvective gyrotactic microorganisms in third-grade nanofluid flow over a Riga surface with stratification: An approach to entropy minimization
- Infrared spectroscopy for ageing assessment of insulating oils via dielectric loss factor and interfacial tension
- Influence of cationic surfactants on the growth of gypsum crystals
- Study on instability mechanism of KCl/PHPA drilling waste fluid
- Analytical solutions of the extended Kadomtsev–Petviashvili equation in nonlinear media
- A novel compact highly sensitive non-invasive microwave antenna sensor for blood glucose monitoring
- Inspection of Couette and pressure-driven Poiseuille entropy-optimized dissipated flow in a suction/injection horizontal channel: Analytical solutions
- Conserved vectors and solutions of the two-dimensional potential KP equation
- The reciprocal linear effect, a new optical effect of the Sagnac type
- Optimal interatomic potentials using modified method of least squares: Optimal form of interatomic potentials
- The soliton solutions for stochastic Calogero–Bogoyavlenskii Schiff equation in plasma physics/fluid mechanics
- Research on absolute ranging technology of resampling phase comparison method based on FMCW
- Analysis of Cu and Zn contents in aluminum alloys by femtosecond laser-ablation spark-induced breakdown spectroscopy
- Nonsequential double ionization channels control of CO2 molecules with counter-rotating two-color circularly polarized laser field by laser wavelength
- Fractional-order modeling: Analysis of foam drainage and Fisher's equations
- Thermo-solutal Marangoni convective Darcy-Forchheimer bio-hybrid nanofluid flow over a permeable disk with activation energy: Analysis of interfacial nanolayer thickness
- Investigation on topology-optimized compressor piston by metal additive manufacturing technique: Analytical and numeric computational modeling using finite element analysis in ANSYS
- Breast cancer segmentation using a hybrid AttendSeg architecture combined with a gravitational clustering optimization algorithm using mathematical modelling
- On the localized and periodic solutions to the time-fractional Klein-Gordan equations: Optimal additive function method and new iterative method
- 3D thin-film nanofluid flow with heat transfer on an inclined disc by using HWCM
- Numerical study of static pressure on the sonochemistry characteristics of the gas bubble under acoustic excitation
- Optimal auxiliary function method for analyzing nonlinear system of coupled Schrödinger–KdV equation with Caputo operator
- Analysis of magnetized micropolar fluid subjected to generalized heat-mass transfer theories
- Does the Mott problem extend to Geiger counters?
- Stability analysis, phase plane analysis, and isolated soliton solution to the LGH equation in mathematical physics
- Effects of Joule heating and reaction mechanisms on couple stress fluid flow with peristalsis in the presence of a porous material through an inclined channel
- Bayesian and E-Bayesian estimation based on constant-stress partially accelerated life testing for inverted Topp–Leone distribution
- Dynamical and physical characteristics of soliton solutions to the (2+1)-dimensional Konopelchenko–Dubrovsky system
- Study of fractional variable order COVID-19 environmental transformation model
- Sisko nanofluid flow through exponential stretching sheet with swimming of motile gyrotactic microorganisms: An application to nanoengineering
- Influence of the regularization scheme in the QCD phase diagram in the PNJL model
- Fixed-point theory and numerical analysis of an epidemic model with fractional calculus: Exploring dynamical behavior
- Computational analysis of reconstructing current and sag of three-phase overhead line based on the TMR sensor array
- Investigation of tripled sine-Gordon equation: Localized modes in multi-stacked long Josephson junctions
- High-sensitivity on-chip temperature sensor based on cascaded microring resonators
- Pathological study on uncertain numbers and proposed solutions for discrete fuzzy fractional order calculus
- Bifurcation, chaotic behavior, and traveling wave solution of stochastic coupled Konno–Oono equation with multiplicative noise in the Stratonovich sense
- Thermal radiation and heat generation on three-dimensional Casson fluid motion via porous stretching surface with variable thermal conductivity
- Numerical simulation and analysis of Airy's-type equation
- A homotopy perturbation method with Elzaki transformation for solving the fractional Biswas–Milovic model
- Heat transfer performance of magnetohydrodynamic multiphase nanofluid flow of Cu–Al2O3/H2O over a stretching cylinder
- ΛCDM and the principle of equivalence
- Axisymmetric stagnation-point flow of non-Newtonian nanomaterial and heat transport over a lubricated surface: Hybrid homotopy analysis method simulations
- HAM simulation for bioconvective magnetohydrodynamic flow of Walters-B fluid containing nanoparticles and microorganisms past a stretching sheet with velocity slip and convective conditions
- Coupled heat and mass transfer mathematical study for lubricated non-Newtonian nanomaterial conveying oblique stagnation point flow: A comparison of viscous and viscoelastic nanofluid model
- Power Topp–Leone exponential negative family of distributions with numerical illustrations to engineering and biological data
- Extracting solitary solutions of the nonlinear Kaup–Kupershmidt (KK) equation by analytical method
- A case study on the environmental and economic impact of photovoltaic systems in wastewater treatment plants
- Application of IoT network for marine wildlife surveillance
- Non-similar modeling and numerical simulations of microploar hybrid nanofluid adjacent to isothermal sphere
- Joint optimization of two-dimensional warranty period and maintenance strategy considering availability and cost constraints
- Numerical investigation of the flow characteristics involving dissipation and slip effects in a convectively nanofluid within a porous medium
- Spectral uncertainty analysis of grassland and its camouflage materials based on land-based hyperspectral images
- Application of low-altitude wind shear recognition algorithm and laser wind radar in aviation meteorological services
- Investigation of different structures of screw extruders on the flow in direct ink writing SiC slurry based on LBM
- Harmonic current suppression method of virtual DC motor based on fuzzy sliding mode
- Micropolar flow and heat transfer within a permeable channel using the successive linearization method
- Different lump k-soliton solutions to (2+1)-dimensional KdV system using Hirota binary Bell polynomials
- Investigation of nanomaterials in flow of non-Newtonian liquid toward a stretchable surface
- Weak beat frequency extraction method for photon Doppler signal with low signal-to-noise ratio
- Electrokinetic energy conversion of nanofluids in porous microtubes with Green’s function
- Examining the role of activation energy and convective boundary conditions in nanofluid behavior of Couette-Poiseuille flow
- Review Article
- Effects of stretching on phase transformation of PVDF and its copolymers: A review
- Special Issue on Transport phenomena and thermal analysis in micro/nano-scale structure surfaces - Part IV
- Prediction and monitoring model for farmland environmental system using soil sensor and neural network algorithm
- Special Issue on Advanced Topics on the Modelling and Assessment of Complicated Physical Phenomena - Part III
- Some standard and nonstandard finite difference schemes for a reaction–diffusion–chemotaxis model
- Special Issue on Advanced Energy Materials - Part II
- Rapid productivity prediction method for frac hits affected wells based on gas reservoir numerical simulation and probability method
- Special Issue on Novel Numerical and Analytical Techniques for Fractional Nonlinear Schrodinger Type - Part III
- Adomian decomposition method for solution of fourteenth order boundary value problems
- New soliton solutions of modified (3+1)-D Wazwaz–Benjamin–Bona–Mahony and (2+1)-D cubic Klein–Gordon equations using first integral method
- On traveling wave solutions to Manakov model with variable coefficients
- Rational approximation for solving Fredholm integro-differential equations by new algorithm
- Special Issue on Predicting pattern alterations in nature - Part I
- Modeling the monkeypox infection using the Mittag–Leffler kernel
- Spectral analysis of variable-order multi-terms fractional differential equations
- Special Issue on Nanomaterial utilization and structural optimization - Part I
- Heat treatment and tensile test of 3D-printed parts manufactured at different build orientations