
Adaptation to driver-assistance systems depending on experience
-
Monika Ucińska


Abstract
Many tasks that until recently could only be performed by humans are now entrusted to machines. Automation plays an increasingly important role in many areas of life, and its special role is observed in broadly understood transport, affecting the mobility, behaviour, and safety of drivers. Faced with the threat of a large number of accidents, deaths, and injuries, vehicles equipped with driver-assistance systems, the so-called ADAS (advanced driver-assistance system), are a significant support for the driver in reacting to the unexpected situations. The studies conducted so far indicate that the experience of using these systems may increase not only the comfort but most of all the safety of road users. In Poland, such analyses are still a challenge. The aim of the study designed by scientists from the Motor Transport Institute was to analyse the impact of the experience in using a vehicle equipped with systems on the speedy adaptation to the use of new driver-assistance systems. The adaptation process for the use of three systems was taken into account: adaptive cruise control, blind spot detection system, and lane keeping assistant. The research was carried out in real traffic. Particular attention was paid to the reactions of people who have no experience with the use of driver-assistance systems in vehicles, compared to those who have used these systems before. Proprietary questionnaires on the drivers’ feelings were used for the analyses. As expected, the analyses showed that experience with driver-assistance systems is an important factor influencing the speed of adaptation and the sense of comfort in using the systems.
1 Introduction
Demographic analyses of road accidents in Poland conducted every year show that about 90% of them are caused by inappropriate behaviour of a person (usually the driver). The introduction of advanced driver-assistance systems (ADAS) in modern vehicles seems to provide an opportunity to increase the level of road safety [1,22]. Depending on the degree of automation, they can warn the driver about the danger or take control of the vehicle. Automation of the vehicle mainly concerns the basic tasks related to manoeuvring the vehicle (braking and accelerating) as well as all other manoeuvres that have been performed by the driver so far [2]. Four classes of functions that have so far been implemented by the driver are subject to automation [3]:
obtaining the information.
processing of information.
making a decision.
performing of control activities.
For all classes, automation can range from low to high level [4,5]. To date, several classifications have been developed to determine the level of vehicle automation. The most widely used is the classification developed by the International Society of Automotive Engineers [6].
It defines six levels of automation:
Level 0 (no automation) – total driver control in all aspects of dynamic driving.
Level 1 (driver assistance) – presence of driver-assistance systems involving steering or accelerating/braking the vehicle. All other aspects of the dynamic driving task are performed by the driver.
Level 2 (partial automation) – the driver assistance is specific to a given driving mode, involving steering or accelerating/braking using information about the driving environment and with the expectation that the driver will perform all other aspects of the dynamic driving task. The driver is responsible for the supervision and implementation of the remaining driving elements.
Level 3 (conditional automation) – the system is able to take control of driving. Expectation that the driver will respond appropriately to a request for intervention (taking control).
Level 4 (high automation) – the system is able to control the vehicle by itself under certain conditions, although this does not mean full automation.
Level 5 (full automation) – no driver intervention is required, independent driving in all road and environmental conditions.
It should be noted that as vehicle automation increases, human participation in the control process decreases. Certain activities are performed by the system and the role of the driver is to control the traffic situation and to appropriately (as quickly as possible) react in an emergency. Although one should not take the responsibility away from the driver, in order to ensure the highest possible level of safety, it is necessary to know how the system works and its capabilities.
Past research shows that age and driving experience have a significant impact on on-road behaviour and its impact on adaptation to automation [7–9]. Also, the driver’s experience in driving with ADAS may affect the adaptation to their use [1]. Most of the research conducted around the world on ADAS relates to the adaptive cruise control (ACC) system. It is one of the most important systems analysed in terms of road safety. Since not adapting the speed to traffic conditions has been one of the main causes of road accidents for many years, both in Poland and around the world, using the ACC system, the task of which is to maintain a constant speed determined by the driver while maintaining a safe distance from the vehicle in front, may potentially prevent them. The results of the research by Bianchi et al. [10] confirm that ACC users with experience in using the system drive more slowly and maintain safer distances from the vehicle in front compared to the inexperienced people. Similar conclusions can be drawn from the study described by Larsson et al. [11] conducted under simulation conditions. The results obtained showed that experienced ACC users were half a second faster when braking compared to novice users. Driving in the simulator without the use of ACC, with the use of ACC, and ACC with steering assistance was compared. The study involved 31 participants, in a repeated measurement system, including 10 drivers who had not used ACC before and 21 experienced drivers. As expected, when comparing the experienced and novice ACC users, it was found that both user groups had longer brake response times for automation compared to the manual control. However, this effect was much smaller in people previously experienced with ACC. The ACC-experienced individuals responded faster than novices. In other words, experienced ACC users respond faster to critical situations when the ACC is engaged, possibly because they have learned to react to the system rather than the situation itself. These results suggest that some level of ACC experience may influence the degree to which drivers appear capable of responding to unforeseen events.
The influence of the driver’s experience and familiarity with automation on the control of autonomous systems is shown by the research of Larsson [12]. The reactions of drivers (experienced and inexperienced ACC users) to dangerous road incidents while driving using ACC were checked. Drivers who had less experience driving with ACC showed a tendency to be more cautious, i.e. not handing over control to the system or constantly monitoring system operation and taking manual control even before the ACC began to respond to a critical situation. It was found that previous experience with ACC influenced not only drivers’ knowledge of system limitations but also their reaction time to undesirable system behaviour. Drivers reacted more slowly when the automation was turned on than without ACC while driving in the simulator. In contrast, by examining drivers’ reaction times in the off-road test, drivers reacted faster to the situation with ACC active than without.
One of the key issues with automation is the drivers’ confidence in the automated driving. Dikmen and Burns [13] conducted a survey of Tesla drivers about their experiences with two advanced driver-assistance systems: autopilot (a system that detects signs and which stops and starts when entering an intersection when the situation allows it; cameras and sensors observe not only road situations but also the side of the road; in the event of an emergency, the car slows down or stops completely) and summon (which guarantees recalling the vehicle from a short distance using the application). The drivers declared great confidence in both systems; while with the autopilot, a decrease in confidence with age was evident. Additionally, the drivers who experienced unexpected behaviour of their vehicles reported lower levels of confidence in autopilot. Over time, confidence in these systems grew, regardless of the amount of experience. Additionally, confidence was correlated with several attitudes and behavioural factors such as the frequency of use, self-assessment of the knowledge about these systems, and the ease of learning.
The analyses presented here show that, apart from the experience in use, confidence in autonomous systems differs among individuals depending on age. Young drivers are less dependent on automation and usually spend less time verifying information from the system, while older people have more confidence in the automation but have a greater cognitive load; and it takes them more time to adjust their behaviour to the operation of the system [14,15]. Other studies have shown that older people do not take full advantage of new technologies because they do not see the need, do not know the devices, and find them too inaccessible. In addition, many older drivers generally express a desire to use partial automation, declaring less interest than younger drivers in full autonomy [16,17].
In the context of age and automation, it was also checked [18] whether advanced technologies in vehicles can contribute to supporting the functioning of older people on the road, thus increasing safety. The focus was on three areas: (1) use (how older drivers use technology), (2) perception (what they think about technology), and (3) results (benefits of using technology). Twelve technologies were selected for review and grouped into three categories: crash avoidance systems (lane departure warning, curve speed warning, forward collision warning, blind spot detection [BSD], and parking assistance); in-vehicle information systems (navigation assistance and intelligent speed adaptation); and other systems (ACC, automatic crash notification, night vision enhancement, adaptive headlight, and voice-activated control). Some of these technologies have been shown to help older drivers avoid accidents, improve driving comfort, make driving easier, and drive to places they would normally avoid.
2 Methodology
The aim of the study designed at the Motor Transport Institute, conducted under the conditions of the national road infrastructure, was, inter alia, to analyse the importance of experience in using driver-assistance systems for adaptation to their use. The sense of comfort related to the use of the systems was also analysed.
Based on the theoretical implications, the following research hypotheses were made:
Drivers who are experienced in using driver-assistance systems observe fewer difficulties in operating the systems.
Drivers who are experienced in using driver-assistance systems show greater confidence in the systems.
Drivers who are experienced in using systems adapt faster to driver-assistance systems.
The research experiment was designed in such a way that it was possible to analyse both the user and the observer.
From among the existing driver-assistance systems, three were selected and evaluated in a real traffic test: (1) lane keeping assist (LKA), (2) ACC, and (3) BSD, as those that have a potentially high impact on traffic safety. The aforementioned systems were designed to maintain the right track on the expressway, maintain a safe distance from the vehicles in front, and, if necessary, brake the vehicle as well as to detect the presence of an object in the blind spot and signal danger to the driver when changing lanes. The participants’ task was to perform manoeuvres on the road indicated by the researcher-observer (acceleration, braking, lane changes, etc.). During the trip, the test subjects performed a total of 10 tests (4 – LKA, 3 – ACC, 3 – BSD) in one vehicle. Five models of different brands of vehicles were used for the research.
The diagram of the test procedure is shown in Figure 1.
Diagram of the planned procedure to perform tests in traffic. Source: author’s own study.
Prior to beginning the tests, the person tested was thoroughly instructed about the course of the procedure followed by a short test drive on a dedicated road (an access road near the expressway). The test drive itself took place on a designated expressway, with good road conditions, between 10 am and 2 pm. During the test, the normal traffic of other vehicles was observed. Each of the subjects during the test run performed 4 tests of the LKA system, 3 ACC tests, and 3 BSD tests, i.e. a total of 10 tests in a given vehicle.
The assessment of the dependence of the adaptation speed, understood as the time after which the person felt comfortable, was made based on two tools: proprietary questionnaires to assess the systems operation and driver’s feelings, collectively for all respondents, and then a more detailed analysis broken down by experience in using a given system.
One questionnaire (1) was filled in by the observer accompanying the driver while driving in the vehicle, based on his/her responses, comments, and the observer’s own observations. The examined person assessed the comfort and safety when performing a manoeuvre with the interaction of a given system after each completed test (after each performed manoeuvre), separately for a particular system. The driver responded to the questions by assessing the given aspect on a scale of 1–5, where 1 was the lowest and 5 the highest. The second questionnaire (2) was filled in by the driver after completing the drive, where the respondent assessed the systems by responding to individual questions. The respondent assessed the adaptation to driver-assistance systems, which is understood as the time needed to feel comfortable using each of the systems separately. He/she also assessed the level of difficulty in his/her operation, pointing to the elements that caused problems. The driver responded to most issues by assessing a given aspect related to a particular system on a scale of 1–5, where 1 was the lowest and 5 the highest. The respondents also expressed their opinion on whether the presented systems can improve road safety in Poland.
2.1 Description of the research group
Forty-one drivers (29% women and 71% men) participated in the study. The gender distribution reflects the dominant division in the driving population. The mean age of the study participants was M = 44.78 (SD = 10.4). The youngest respondent was 30 years old, and the oldest was 70. In terms of education, most of the respondents (85%) had higher education followed by secondary education (10%). The definite minority of the respondents was drivers with incomplete higher education (2.4%) and basic vocational education (also 2.4%).
One of the main selection criteria for the research was the possession of a category B driving licence; moreover, 17.1% of the respondents was holders of the A and C driving licence categories, 7.3% was B + E category, and 4.9% C + E category holders. Two drivers had additional licences (e.g. ADR). The drivers surveyed were characterised by extensive driving experience, because the average number of years in terms of the time of holding the licence was 21 years (M = 21.41, SD = 9.86).
The drivers also assessed their driving skills. More than half of the surveyed drivers (65.9%) assessed them as good, 17.1% (7 people) as very good, and the same number considered their skills to be average. None of the respondents assessed their skills as low or very low.
In the context of driving frequency, all respondents are active drivers – 38 respondents (92.7%) said that they were everyday road users as drivers, and 7.3% drive a vehicle several times a week. One-fifth of them (22%) travel between 260 and 850 km a month; 41.5% (N = 17) of the respondents travel between 860 and 1,700 km, 2.5% (N = 1) less than 250 km, and one in three respondents (34.1%, N = 14) travels more than 1,800 km per month.
From the point of view of the subject of this article, it was important to check the knowledge of the respondents about what they are and how driver-assistance systems work as well as whether the drivers have driver-assistance systems in their own vehicles and how often they have used or happened to use them. The analysis of the aforementioned declarations of the respondents showed that most of the surveyed group of drivers (about 80%) had knowledge of the driver-assistance systems used in the study (they know what a given system is and how it works). At the same time, nearly 90% of respondents did not have driver-assistance systems in their own vehicles. It is therefore mainly theoretical knowledge.
Nineteen drivers (46%) had no previous experience with driver-assistance systems (inexperienced), and 22 (54%) of the study participants had experience in using them.
3 Results of analyses
To increase the reliability of the study, a twin-track approach was taken. Qualitative assessment was made on the basis of observations (in a systematic and standardised manner), converted into quantitative data, and transferred to the SPSS statistical package in order to increase the accuracy of the observations.
At the beginning, the results were summarised in the context of the entire research group (N = 41); in order to analyse in more detail the issue of adaptation to the driver-assistance systems while driving, the difficulty in operating the systems, confidence in automation, and the speed of adaptation were assessed, depending on the experience in using a given system (N = 19 – inexperienced and N = 22 – experienced). The analyses, due to the non-uniform distribution of variables (no normal distribution), were performed using the non-parametric Mann–Whitney U test.
The respondents assessed the difficulty in operating the systems after the trip was completed (after all system tests). This level was assessed on a scale of 1–5 (where 1 meant that the system was very difficult – the person was not able to understand how the system works and 5 – very easy – nothing was a problem; Figure 2).
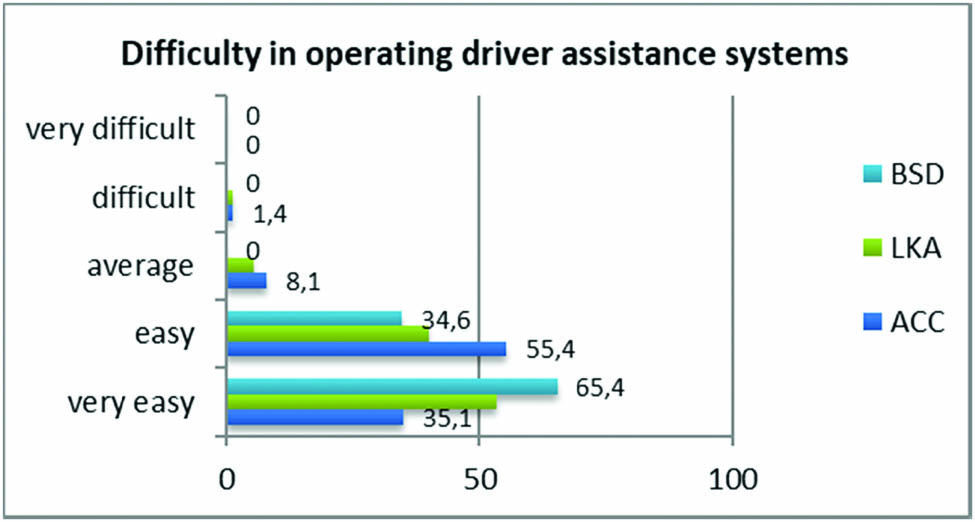
Difficulty level in operating driver-assistance systems (%). Source: author’s own study.
The analyses showed that, according to the respondents, the systems used in the study were easy or very easy to use. Most often, only a short instruction was sufficient to use them. None of the respondents had a problem understanding the system’s operation. However, it should be borne in mind that the description was clearly given by the experimenter immediately before starting the drive. Therefore, the driver did not have to independently think how to start a given system and be sure that it would work. This was verified while driving when the tested person had to activate the ACC system during the trips. As it turned out, it was not an easy moment, despite the earlier declaration of the ease of turning the system on.
Detailed analyses in this area were made for the experienced and inexperienced drivers. The results are shown in Figure 3.
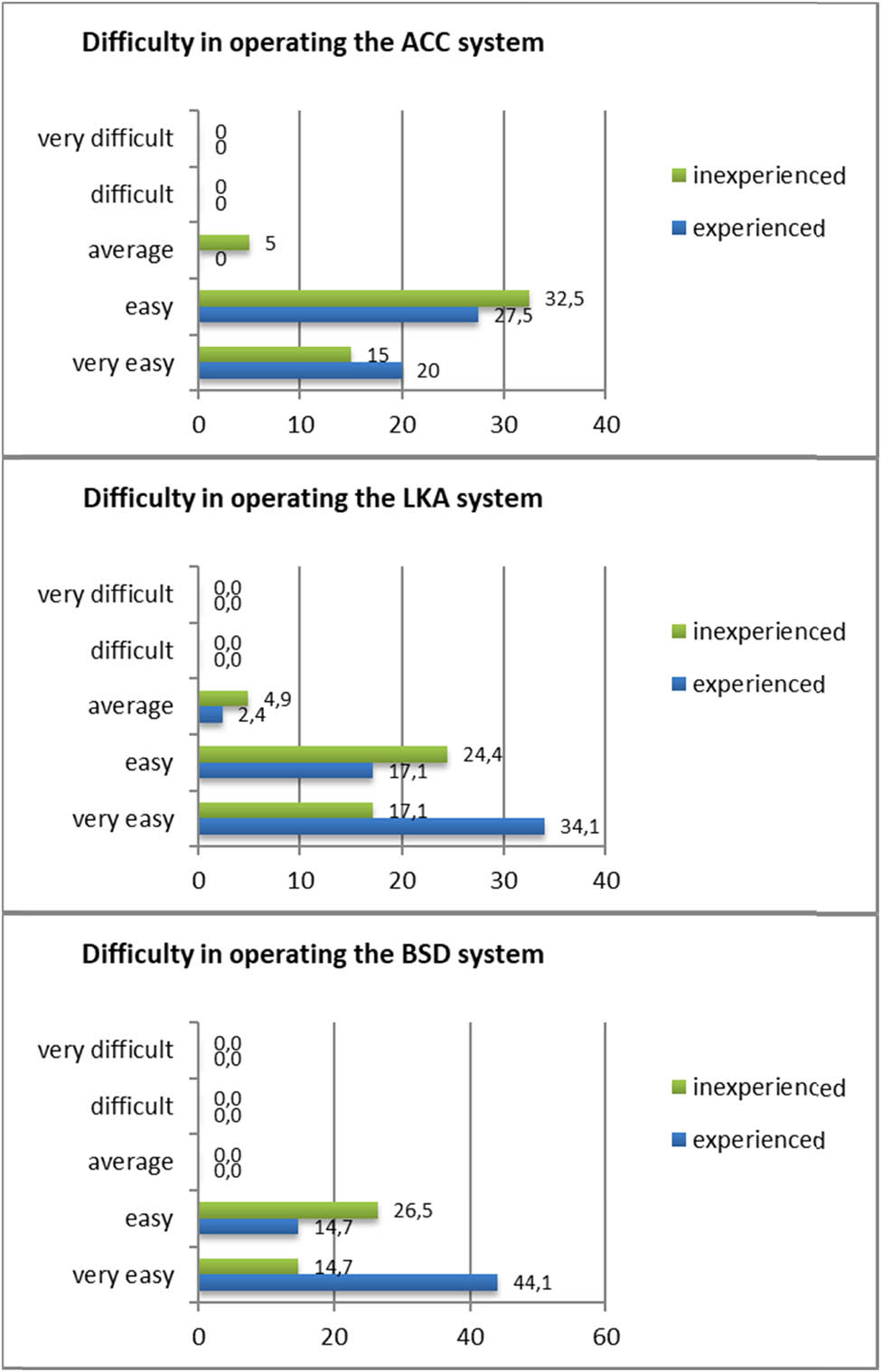
Difficulty level in operating driver-assistance systems by experienced and inexperienced drivers (%). Source: author’s own study.
Although more experienced drivers compared to inexperienced drivers considered the systems (LKA and BSD) to be very easy or easy to use, statistical analyses of the difficulty assessment during the ACC and LKA system trials did not show significant differences between the experienced and inexperienced groups. The only significant differences between the experienced and the inexperienced were found in the analyses of the BSD, U = 85.000, Z = −2.257, and p = 0.024. The system was more difficult to operate for inexperienced drivers. The ACC system was rated at a comparable level. According to inexperienced drivers, the ACC system was the least unreliable (compared with BSC, LKA) and most appreciated by them.
Next the confidence in driver-assistance systems, which the respondents assessed after completing the trip, was tested. The answers are presented in Figure 4.
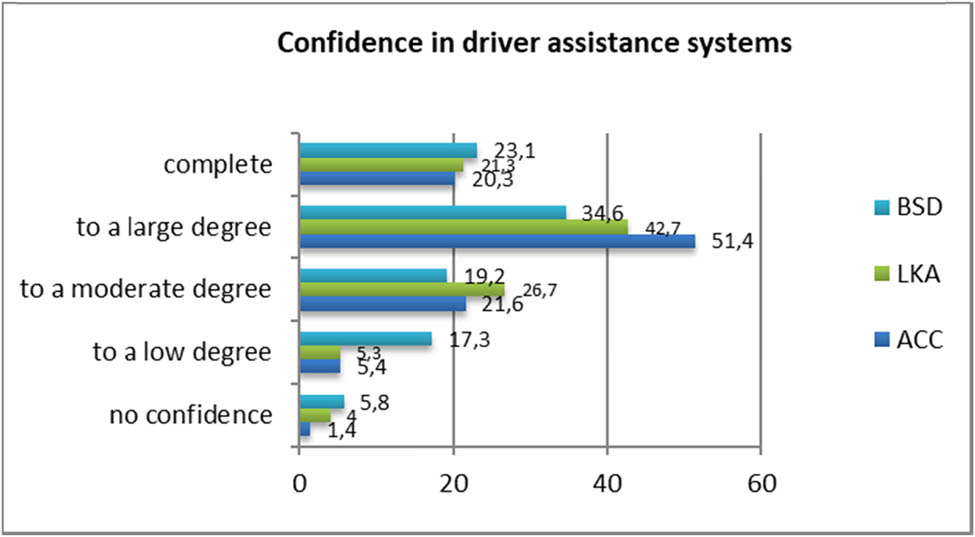
Confidence in driver-assistance systems (%). Source: author’s own study.
The analysis of data on the drivers’ confidence in individual systems revealed that the respondents trusted the systems while using them. The hardest part was trusting the BSD system. It was noted that during nearly 6% of the test trips, the system was not trusted at all, and drivers felt little confidence in 17.3% of the trips. During 23% of the test drives, the test subjects trusted the BSD system. The greatest confidence was in relation to adaptive cruise control. As many as 70.7% of trips was made with a feeling of total or great confidence. Despite the declared confidence in the operation of the systems, also in this area, the respondents reported various observations. Many drivers indicated that they had limited confidence in the systems because they like to control how the vehicle behaves. Moreover, they emphasised in their statements that the awareness of having active systems, as well as full confidence in their infallibility, may affect drivers’ vigilance, ‘putting them to sleep’. In this context, they expressed their belief in the possibility of a system failure. Additionally, not knowing when and under what circumstances the system can turn itself off and lack of carefulness can lead to hazardous situations on the road.
The sense of confidence was also checked separately for experienced and inexperienced drivers. The data, shown in the graphs below, indicate that driver’s express confidence in the systems when using them. A complete confidence in the LKA system was indicated in the vast majority of experienced drivers after the test runs. The inexperienced, however, trusted it only to a large extent. In the case of the ACC system, inexperienced drivers’ confidence was greater than that of the experienced drivers. This is because this system is responsible for safety to the greatest extent, as compared to the others, and takes the responsibility away from the driver (the vehicle accelerates and brakes itself). This may indicate that drivers who have not used this system before feel fascinated by it. The least confidence was shown for the BSD system, but it was higher in the experienced drivers (Figure 5).
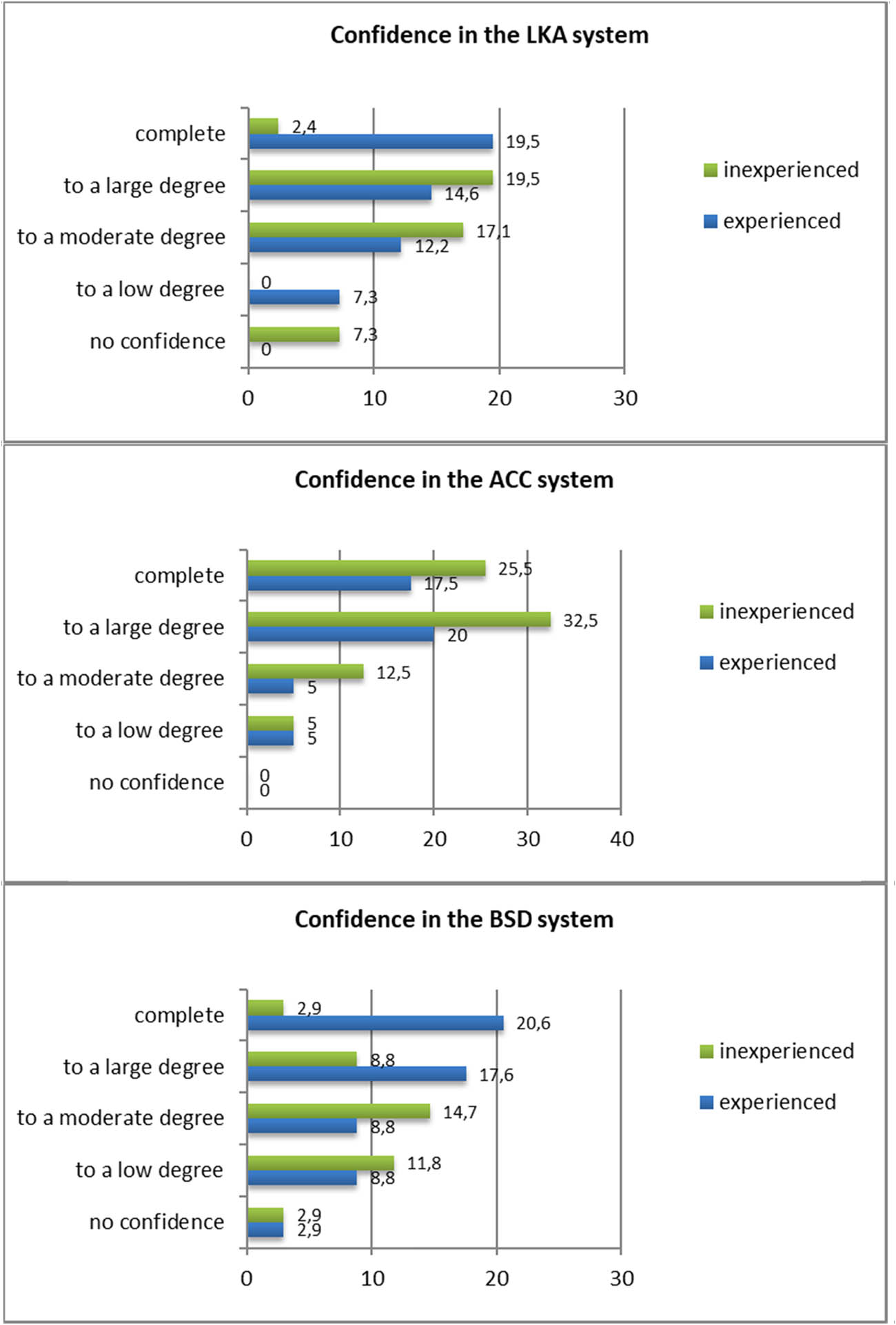
Confidence in driver-assistance systems of experienced and inexperienced drivers (%). Source: author’s own study.
Analyses regarding the confidence felt during the LKA trials showed no significant differences between the experienced and inexperienced groups. In the case of ACC, there were differences at the level of the statistical trend between the experienced and inexperienced groups, U = 136.500, Z = −1.860, and p = 0.063. The experienced ones trusted the system slightly less. Dependencies were also found during analyses of the system warning about an object in the blind spot. The level of confidence during these tests differed between experienced and inexperienced drivers, U = 84.500, Z = −1.995, and p = 0.046. Experienced persons trusted the BSD system more.
The study examined the adaptation to automation, i.e. the time it took the driver to feel comfortable using the driver-assistance system (Figure 6).
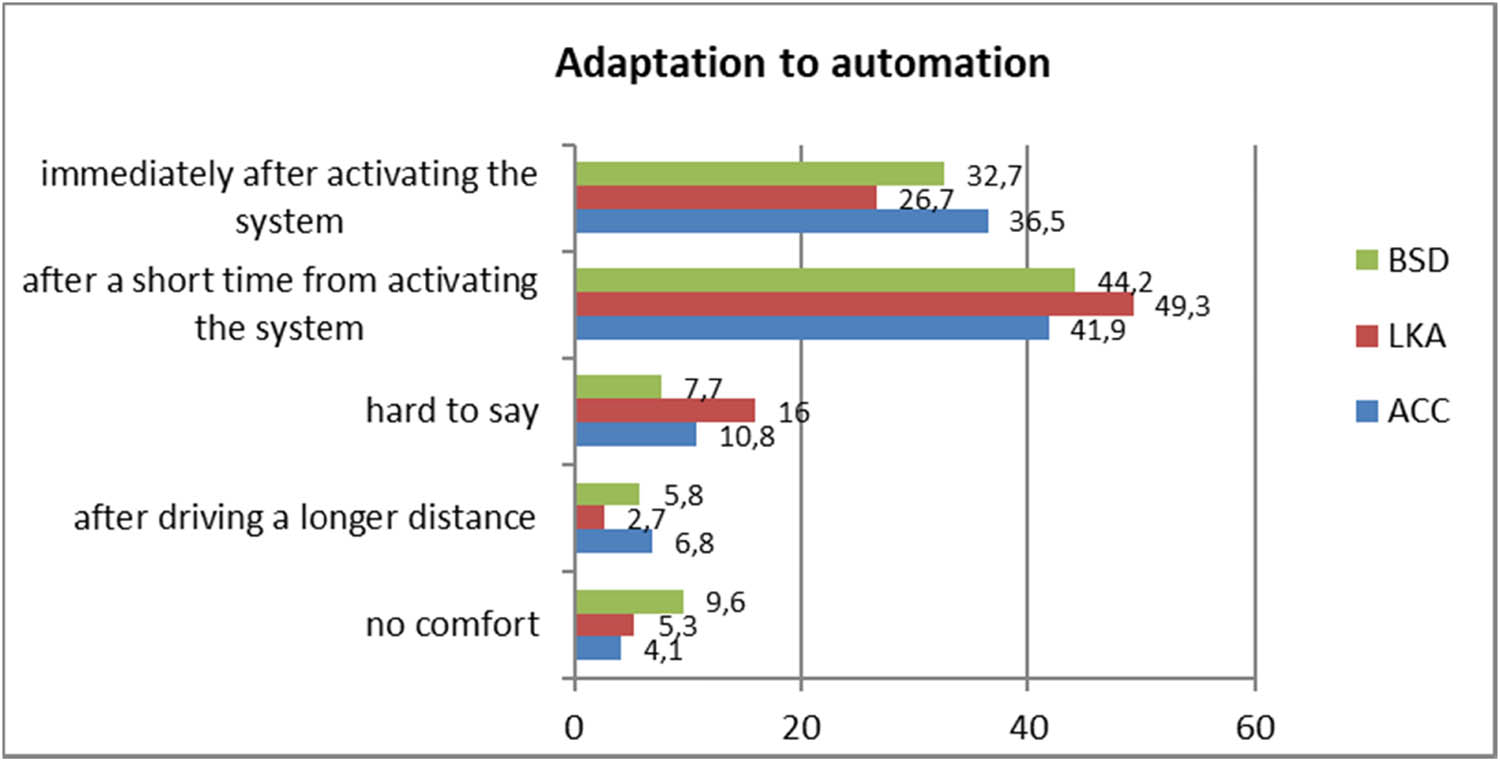
Adaptation to automation – Feeling of comfort in using the various driver-assistance systems (%). Source: author’s own study.
In terms of the time needed to adapt to the system and the resulting sense of comfort, the ACC and LKA systems were rated the highest. During 78.4% of drives with the ACC system, the respondents felt comfortable immediately or shortly after activating the system. Similar results were obtained for LKA. In 76% of trips, the respondents needed little or no time to adapt.
The next chart shows the relationship between the level of experience in using a given system and adaptation. Assessments were made on a scale of 1–5, where 1 meant the greatest problems in adaptation (and at the same time the least comfort in using the system) and 5 the greatest ease in adapting to the assistance system (Figure 7).
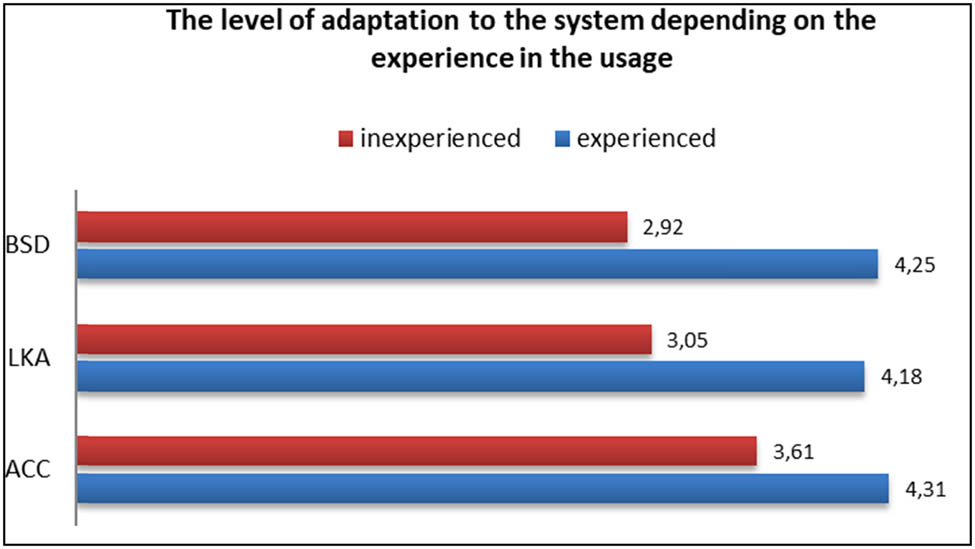
The experience of drivers and the level of adaptation to the use of systems. Source: author’s own study.
As the chart below shows, drivers who had been familiar with the operation of the system earlier (with experience in using the system) adapted much faster to driving with a working system. It should be noted that this did not mean that the operation of the system tested by drivers was the same as the previous system used by them. This ease resulted from the knowledge of the system’s functionality, not the operating skills. The level of difficulty was analysed in the next step of the research. Here, too, it turned out that experience is a key element for the ease of adaptation to the new driver-assistance system (Figure 8).
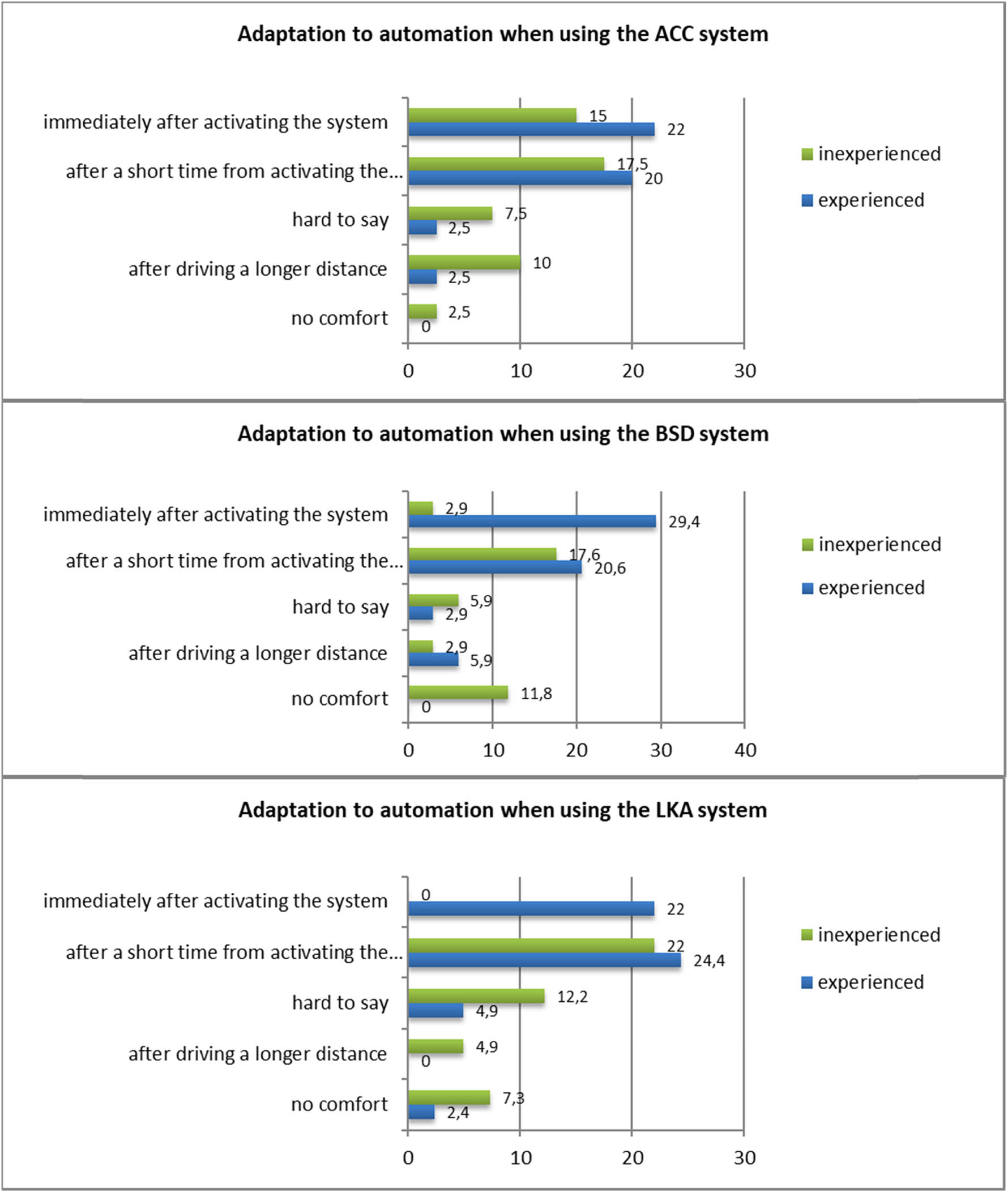
Adaptation to automation when using individual driver-assistance systems in the experienced and inexperienced drivers (%). Source: author’s own study.
Analyses of the speed of adaptation during tests of the adaptive cruise control (ACC) showed no significant differences between the experienced and inexperienced groups. Differences were only noted at the level of the statistical trend, U = 135.500, Z = −1.835, and p = 0.066. Experienced drivers needed slightly less time than inexperienced drivers to adapt to the system – they felt comfortable in less time after activating the system on.
In the analyses of the speed of adaptation during the LKA tests, significant differences were found between the experienced and inexperienced groups, U = 275.500, Z = −3.433, and p = 0.001. Experienced users needed less time to adapt to the system.
Analyses of the speed of adaptation during tests of the BSD system also showed differences between the experienced and inexperienced groups, U = 60.000, Z = −2.938, and p = 0.003. Experienced drivers felt comfortable in a shorter time after activating the system compared to inexperienced drivers.
The assumption for the use of driver-assistance systems is to improve road safety. Therefore, the respondents were asked about their evaluation of the impact of the tested systems on the improvement of road safety in Poland (Figure 9).
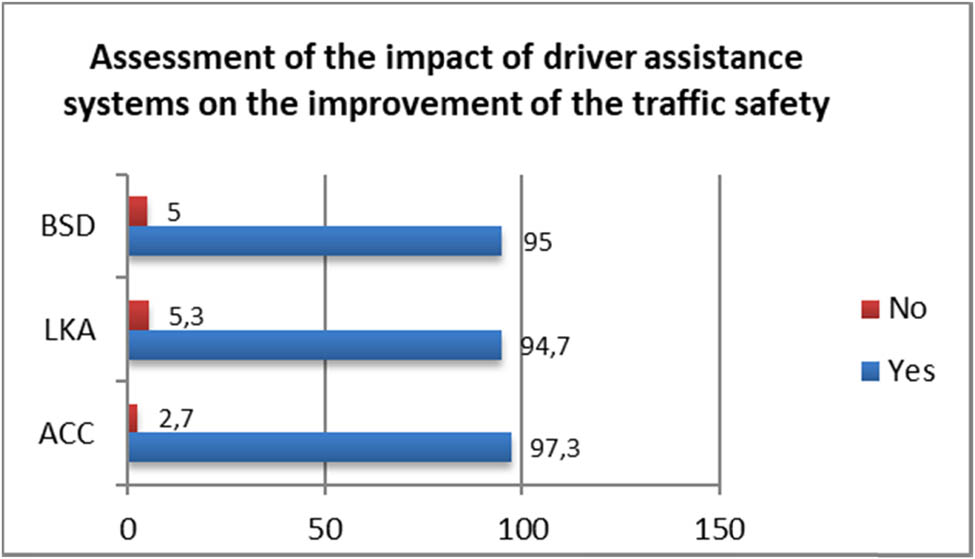
Assessment of the impact of driver-assistance systems on the improvement of the traffic safety (%). Source: author’s own study.
According to the majority of the respondents (95%), the systems can improve road safety. A few commented that the systems could improve BSD, but not in the present form, and only when they are improved. Many also emphasised that an important element that could improve road safety is the sound signal informing about the operation of the system.
3.1 Additional analyses
During the experiment, additional elements were also controlled between trials. Among other things, the sense of comfort when performing a manoeuvre with the system’s interaction was checked. This was performed for each test run, separately for each system. The data are presented in Figure 10.
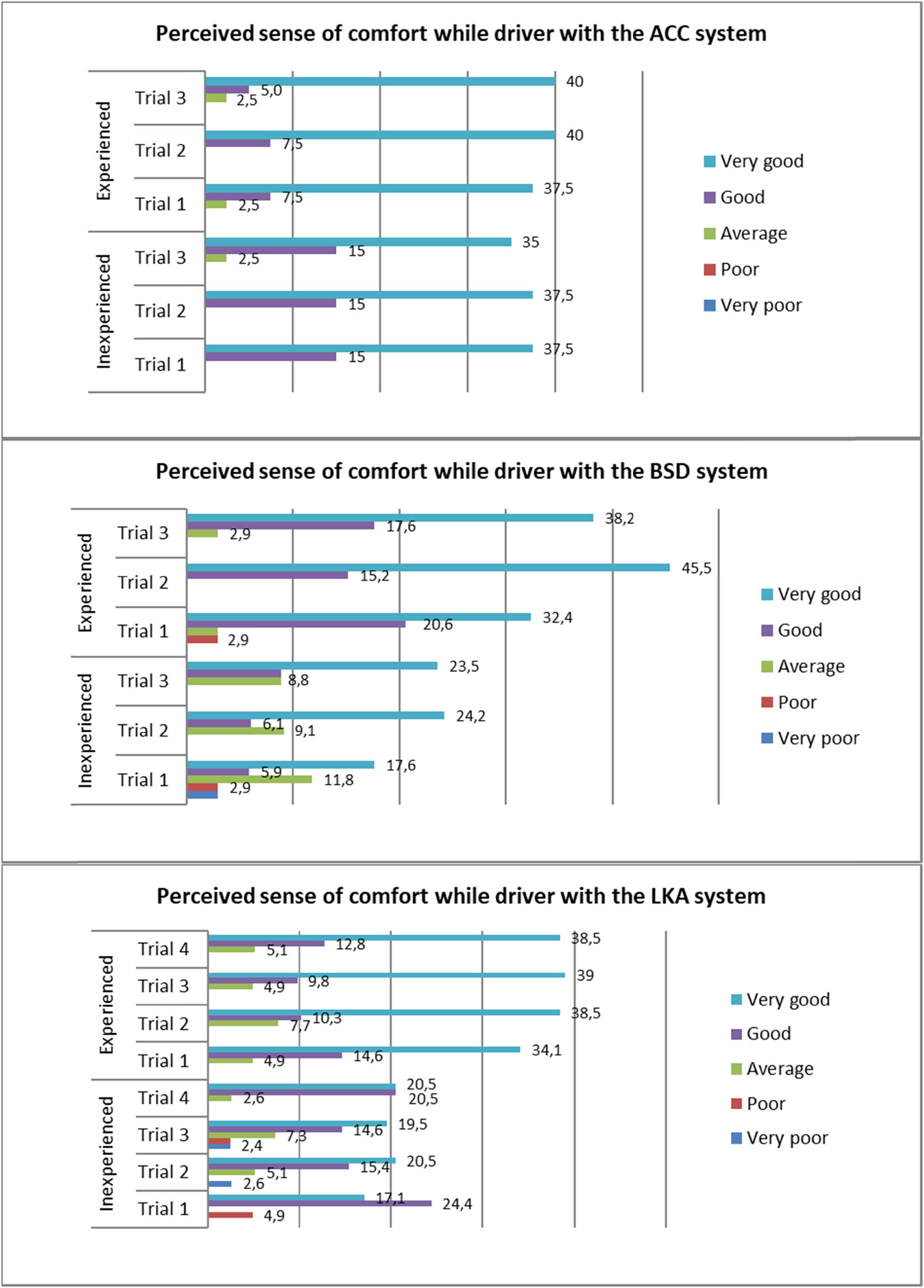
The sense of comfort felt by the experienced and inexperienced drivers during research drive (%). Source: author’s own study.
Despite the fact that, regardless of experience, both groups of drivers felt comfortable when using the ACC system, no statistically significant correlation was found between experience and the perceived sense of comfort, declared just after test runs with active cruise control. Differences were also not shown in the case of the BSD system, although declarations that the least comfort was felt when using this system were observed here. The analyses of the relationship between the sense of comfort and experience showed significant dependencies in trial 3 of the LKA system, U = 139.000, Z = −2.068, and p = 0.039. Those inexperienced with the use of assistance systems had a lower sense of comfort than the drivers familiar with the LKA system.
Additionally, the relationship between the drivers’ age and various variables was analysed. For this purpose, the variable was dichotomised and the respondents were divided into three groups – young people (30–39 years, N = 14), middle-aged people (40–54 years, N = 16), and older people (55+ years, N = 11).
In the context of the sense of comfort, no statistically significant relationships were found. Differences were only observed between consecutive trials. Correlation analyses showed that the older the subject, the weaker the feeling of comfort in trial 2, r = −0.381 and p = 0.017, and trial 3, r = −0.318 and p = 0.043, of the LKA system. In the case of the other trials of the systems (ACC and BSD), no significant correlation was found with the perceived sense of comfort in the individual trials.
In the case of the level of difficulty, the analyses of the ratings of the respondents during the trials of ACC showed significant differences between the groups (p = 0.037). The post hoc tests performed with the Mann–Whitney U test showed that in the ACC trial, the elderly (age group 3) differed significantly from middle-aged people (U = 48.500, Z = −2.289, and p = 0.02) and the youngest (U = 38.000, Z = −2.269, and p = 0.023). This was confirmed by correlation analyses, which showed that the level of difficulty was positively related to the age of the respondents, r = 0.402 and p = 0.01 in the active cruise control test, so the older the respondent, the greater the difficulty assessed.
Analyses of the speed of adaptation during the trials of ACC, LKA, and BSD in the three age groups showed no significant differences between the groups. Similarly, the analysis of the correlation between age (quantitative variable) and the variable concerning the speed of adaptation did not show any significant relationships.
4 Discussion of the results
In the literature on the subject, a deficit of analyses in this area was observed. In the presented research, in accordance with the assumptions of the research hypotheses, it was proved that experience in the use of driver-assistance systems may have an impact on automation, including difficulty in operating, confidence in systems, speed of adaptation, and the sense of comfort associated with it.
The analysis of the general level of difficulty of individual systems shows that, according to the respondents, the systems used in the study were easy or very easy to use. Most often, only a short instruction was sufficient to use them. In the division into experienced and inexperienced drivers, the only significant correlation was found in the case of the BSD system. This system was more difficult to use for inexperienced drivers. These results partially support the first hypothesis, which says that “Drivers who are experienced in using driver-assistance systems observe fewer difficulties in operating the systems.”
In the case of the ACC, LKA, or BSD system operation, the level of difficulty in operation depended on the familiarity with the operation of the system. People who had previous knowledge and experience of what a given system is for, how it works, and its functionality had no difficulties in operating the system. This is important in the context of the analyses of other researchers [19] who see systems training as a potential preventive strategy that could minimise the negative effects of the behavioural adaptation associated with the introduction of new driver-assistance systems.
The second hypothesis was only partially confirmed. Despite the fact that the greatest confidence among drivers was aroused by ACC – adaptive cruise control (most of the respondents declared their confidence in it to a large extent, and in almost 1/4 of the trips there was complete trust in the system), depending on the experience in the case of this system, dependencies were found at the trend level. A significant relationship was shown only in the case of the BSD system. Experienced persons trusted this system more. However, this was the system on which respondents relied the least. This may be due to the fact that both drivers need more time to adapt to the BSD system than in the case of the other two systems and it is also a habit of drivers to look in the mirrors when performing a lane change manoeuvre.
Excessive trust in automation, in the context of adaptation (behavioural adaptation), is also discussed in publications by other researchers [19,20]. They refer to the ACC and LKA systems but they take into account driving experience, not experience in using the systems. They suggest that both experienced and novice users may over-trust automation. Their confidence increases with the exposure to ACC and appears insensitive to failure. Similar trends were also noted in the case of the LKA systems.
However, the results confirmed the third hypothesis which assumed that experienced drivers adapt faster to the use of new driver-assistance systems. The results showed that skilled drivers needed less time to feel comfortable. In the case of the BSD and LKA systems, the relationships were statistically significant, while in the case of the ACC system, the dependencies were at the trend level.
Additional age analyses were performed to provide a broader context analysis. These analyses did not show a relationship between age and the following variables: confidence in systems, difficulty in handling, and adaptation. This allows the conclusion that it is not age but experience in using systems that is a key element for adaptation to the use of LKA, ACC, and BSD systems. These results contradict the analysis by Mann et al. [14] and Sanchez et al. [15], according to whom older drivers take longer to adapt their behaviour to the system operation. The reasons for this state of affairs should be sought in further investigations.
5 Conclusion
The research conducted has shown that vehicle users are generally positive and understand the benefits of modern driver-assistance systems. In addition to increasing the driving comfort, they have the potential to contribute to reducing the number of accidents and collisions, thereby reducing the number of fatalities and injuries and the severity of injuries and damages caused.
The results presented in the analysis were burdened with the so-called experiment effect, and the attitudes of drivers towards individual systems (level of confidence and comfort of use) may be different as a result of more frequent use of these systems (e.g. daily use in their own vehicles). However, the conclusions described above represent an important pointer on the way to the successful adoption of these technologies by drivers, especially in the initial stages of using them.
Despite the fact that safety systems in vehicles, designed to support, among others monitoring the environment, making decisions, or performing various activities related to driving are being developed ever more intensively, it is still human beings, as users of ever-better roads and safer vehicles, who are key elements responsible for causing accidents. The realisation that a vehicle is equipped with advanced safety systems can create over-confidence in its performance. In such cases, drivers may not be attentive and vigilant enough and may engage in additional activities not related to driving (sending text messages, browsing the Internet, etc.) because they assume that the car, in an emergency situation, will react to a given event anyway. Meanwhile, the results of the analyses clearly show that the car is not able to replace the driver in every situation, and appropriate reactions to the dynamically changing road situation may be beyond the scope of its capabilities. In this context, users’ awareness of the actual capabilities of the system and the knowledge of the need to exercise constant control over the vehicle is extremely important.
An experiment in real traffic has shown that the systems used in the research are not infallible. Despite many successful attempts, there were times when the system did not work. This caused the subject great discomfort and a loss of the sense of security in connection with this. It is worth adding that the planned scenarios concerned experimental conditions and therefore excluded unpredictable road situations.
The conducted analyses lead to conclusions that have an impact on road safety. According to almost all respondents (95% of affirmative answers), the systems, despite the fact that they require improvement, can improve road safety, which is consistent with the research [21] conducted in this area around the world.
To sum up, as expected, the experiment conducted proves that experience in the use of driver-assistance systems in vehicles is an important factor in terms of adaptation to driver-assistance systems. For this reason, knowledge about them should be an essential element of driver training and psychoeducation.
-
Funding information: The publication presents fragments of analyses performed as part of the AV-PL-ROAD “Polish Road to Automation of Road Transport” project, financed by the National Centre for Research and Development (Agreement Gospostrateg1/388495/26/NCBR/2019).
-
Conflict of interest: Authors state no conflict of interest.
References
[1] Pereira M, Beggiato M, Petzoldt T. Use of adaptive cruise control functions on motorways and urban roads: changes over time in an on-road study. Appl Ergon. 2015;50:105–12.10.1016/j.apergo.2015.03.002Search in Google Scholar PubMed
[2] Komenda Główna Policji. Wypadki drogowe w Polsce w 2019 roku, Warszawa; 2020.Search in Google Scholar
[3] Meyer J. Personal vehicle transportation. In: Pew R, Hemel SV, editors. Technology for adaptive aging. Washington, DC: The National Academies Press; 2004. p. 253–81.Search in Google Scholar
[4] Choromański W, Grabarek I, Spirzewska A. Systemy human machine interface (HMI) dedykowane samochodom poziomów L2/L3. Prace Naukowe Politechniki Warszawskiej, z. 115, Warszawa; 2017.Search in Google Scholar
[5] Parasuraman R, Riley V. Humans and automation: use, misuse, disuse, abuse. Hum Factors. 1997;39(2):230–53.10.1518/001872097778543886Search in Google Scholar
[6] SAE International. On-road automated vehicle standards committee, taxonomy and definitions for terms; 2014.Search in Google Scholar
[7] Li S, Blythe P, Guo W, Namdeo A. Investigating the effects of age and disengagement in driving on driver’s takeover control performance in highly automated vehicles. Transp Plan Technol. 2019;42(5):470–97.10.1080/03081060.2019.1609221Search in Google Scholar
[8] Ucińska M, Odachowska E, Gąsiorek K, Kruszewski M. Age and experience in driving a vehicle and psychomotor skills in the context of automation. Open Eng. 2020 (in the process of publication).10.1515/eng-2021-0045Search in Google Scholar
[9] Wolfe B, Seppelt BD, Mehler B, Reimer B, Rosenholtz R. Rapid holistic perception and evasion of road hazards. J Exp Psychol Gen. 2019;149(3):490. 10.1037/xge0000665.Search in Google Scholar PubMed
[10] Bianchi Piccinini GF, Rodrigues CM, Leitão M, Simões A. Driver’s behavioral adaptation to adaptive cruise control (ACC): the case of speed and time headway. J Saf Res. 2014;49:77e71–84. 10.1016/j.jsr.2014.02.010.Search in Google Scholar PubMed
[11] Larsson A, Kircher K, Andersson Hultgren J. Learning from experience: familiarity with ACC and responding to a cut-in situation in automated driving. Transp Res Part F. 2014;27:229–37.10.1016/j.trf.2014.05.008Search in Google Scholar
[12] Larsson AFL. Automation and the nature of driving. The effect of adaptive cruise control on drivers’ tactical driving decisions. PhD thesis presented at the Lund University, Lund; 2013.Search in Google Scholar
[13] Dikmen M, Burns C. Trust in autonomous vehicles: the case of Tesla autopilot and summon. 2017 IEEE International conference on systems, man, and cybernetics (SMC); 2017.10.1109/SMC.2017.8122757Search in Google Scholar
[14] Mann WC, Belchior P, Tomita MR. Older adults’ perception and use of PDAs, home automation system, and home health monitoring system. Top Geriatr Rehabil. 2007;23:35–46.10.1097/00013614-200701000-00006Search in Google Scholar
[15] Sanchez J, Rogers WA, Fisk AD, Rovira E. Understanding reliance on automation: effects of error type, error distribution, age and experience. Theor Issues Ergon Sci. 2011;15(2):1–27.10.1080/1463922X.2011.611269Search in Google Scholar PubMed PubMed Central
[16] Abraham H, Lee C, Brady S, Fitzgerald C, Mehler B, Reimer B, et al. Autonomous vehicles and alternatives to driving: trust, preferences, and effects of age. Proceedings of the transportation research board 96th annual meeting, Washington, DC; 2017.Search in Google Scholar
[17] McBride SE, Rogers WA, Fisk AD. Do younger and older adults differentially depend on an automated system? Presented at the human factors and ergonomics society 54th annual meeting; 2010.10.1037/e578632012-008Search in Google Scholar
[18] Eby DW, Molnar LJ, Zhang L, St Louis RM, Zanier N, Kostyniuk LP, et al. Use, perceptions, and benefits of automotive technologies among aging drivers. Injury Epidemiol. 2016;3(1):28.10.1186/s40621-016-0093-4Search in Google Scholar PubMed PubMed Central
[19] Rudin-Brown C, Parker H. Behavioural adaptation to adaptive cruise control (ACC): implications for preventive strategies. Transp Res Part F Traffic Psychol Behav. 2004;7(2):59–76.10.1016/j.trf.2004.02.001Search in Google Scholar
[20] Rudin-Brown C, Noy Y. Investigation of behavioral adaptation to lane departure warnings. Transp Res Rec J Transp Res Board. 2002;1803(1):30–37.10.3141/1803-05Search in Google Scholar
[21] Dotzauer M, de Waard D, Caljouw SR, Pöhler G, Brouwer WH. Behavioral adaptation of young and older drivers to an intersection crossing advisory system. Accid Anal Prev. 2015;74:24–32.10.1016/j.aap.2014.09.030Search in Google Scholar PubMed
[22] Pędzierska M, Pawlak P, Kruszewski M, Jamson S. Estimated assessment of the potential impact of driver assistance systems used in automated vehicles on the level of road safety in Poland. Transp Probl. 2021 (in the process of publication).10.21307/tp-2020-070Search in Google Scholar
© 2021 Monika Ucińska, published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Regular Articles
- Electrochemical studies of the synergistic combination effect of thymus mastichina and illicium verum essential oil extracts on the corrosion inhibition of low carbon steel in dilute acid solution
- Adoption of Business Intelligence to Support Cost Accounting Based Financial Systems — Case Study of XYZ Company
- Techno-Economic Feasibility Analysis of a Hybrid Renewable Energy Supply Options for University Buildings in Saudi Arabia
- Optimized design of a semimetal gasket operating in flange-bolted joints
- Behavior of non-reinforced and reinforced green mortar with fibers
- Field measurement of contact forces on rollers for a large diameter pipe conveyor
- Development of Smartphone-Controlled Hand and Arm Exoskeleton for Persons with Disability
- Investigation of saturation flow rate using video camera at signalized intersections in Jordan
- The features of Ni2MnIn polycrystalline Heusler alloy thin films formation by pulsed laser deposition
- Selection of a workpiece clamping system for computer-aided subtractive manufacturing of geometrically complex medical models
- Development of Solar-Powered Water Pump with 3D Printed Impeller
- Identifying Innovative Reliable Criteria Governing the Selection of Infrastructures Construction Project Delivery Systems
- Kinetics of Carbothermal Reduction Process of Different Size Phosphate Rocks
- Plastic forming processes of transverse non-homogeneous composite metallic sheets
- Accelerated aging of WPCs Based on Polypropylene and Birch plywood Sanding Dust
- Effect of water flow and depth on fatigue crack growth rate of underwater wet welded low carbon steel SS400
- Non-invasive attempts to extinguish flames with the use of high-power acoustic extinguisher
- Filament wound composite fatigue mechanisms investigated with full field DIC strain monitoring
- Structural Timber In Compartment Fires – The Timber Charring and Heat Storage Model
- Technical and economic aspects of starting a selected power unit at low ambient temperatures
- Car braking effectiveness after adaptation for drivers with motor dysfunctions
- Adaptation to driver-assistance systems depending on experience
- A SIMULINK implementation of a vector shift relay with distributed synchronous generator for engineering classes
- Evaluation of measurement uncertainty in a static tensile test
- Errors in documenting the subsoil and their impact on the investment implementation: Case study
- Comparison between two calculation methods for designing a stand-alone PV system according to Mosul city basemap
- Reduction of transport-related air pollution. A case study based on the impact of the COVID-19 pandemic on the level of NOx emissions in the city of Krakow
- Driver intervention performance assessment as a key aspect of L3–L4 automated vehicles deployment
- A new method for solving quadratic fractional programming problem in neutrosophic environment
- Effect of fish scales on fabrication of polyester composite material reinforcements
- Impact of the operation of LNG trucks on the environment
- The effectiveness of the AEB system in the context of the safety of vulnerable road users
- Errors in controlling cars cause tragic accidents involving motorcyclists
- Deformation of designed steel plates: An optimisation of the side hull structure using the finite element approach
- Thermal-strength analysis of a cross-flow heat exchanger and its design improvement
- Effect of thermal collector configuration on the photovoltaic heat transfer performance with 3D CFD modeling
- Experimental identification of the subjective reception of external stimuli during wheelchair driving
- Failure analysis of motorcycle shock breakers
- Experimental analysis of nonlinear characteristics of absorbers with wire rope isolators
- Experimental tests of the antiresonance vibratory mill of a sectional movement trajectory
- Experimental and theoretical investigation of CVT rubber belt vibrations
- Is the cubic parabola really the best railway transition curve?
- Transport properties of the new vibratory conveyor at operations in the resonance zone
- Assessment of resistance to permanent deformations of asphalt mixes of low air void content
- COVID-19 lockdown impact on CERN seismic station ambient noise levels
- Review Articles
- FMEA method in operational reliability of forest harvesters
- Examination of preferences in the field of mobility of the city of Pila in terms of services provided by the Municipal Transport Company in Pila
- Enhancement stability and color fastness of natural dye: A review
- Special Issue: ICE-SEAM 2019 - Part II
- Lane Departure Warning Estimation Using Yaw Acceleration
- Analysis of EMG Signals during Stance and Swing Phases for Controlling Magnetorheological Brake applications
- Sensor Number Optimization Using Neural Network for Ankle Foot Orthosis Equipped with Magnetorheological Brake
- Special Issue: Recent Advances in Civil Engineering - Part II
- Comparison of STM’s reliability system on the example of selected element
- Technical analysis of the renovation works of the wooden palace floors
- Special Issue: TRANSPORT 2020
- Simulation assessment of the half-power bandwidth method in testing shock absorbers
- Predictive analysis of the impact of the time of day on road accidents in Poland
- User’s determination of a proper method for quantifying fuel consumption of a passenger car with compression ignition engine in specific operation conditions
- Analysis and assessment of defectiveness of regulations for the yellow signal at the intersection
- Streamlining possibility of transport-supply logistics when using chosen Operations Research techniques
- Permissible distance – safety system of vehicles in use
- Study of the population in terms of knowledge about the distance between vehicles in motion
- UAVs in rail damage image diagnostics supported by deep-learning networks
- Exhaust emissions of buses LNG and Diesel in RDE tests
- Measurements of urban traffic parameters before and after road reconstruction
- The use of deep recurrent neural networks to predict performance of photovoltaic system for charging electric vehicles
- Analysis of dangers in the operation of city buses at the intersections
- Psychological factors of the transfer of control in an automated vehicle
- Testing and evaluation of cold-start emissions from a gasoline engine in RDE test at two different ambient temperatures
- Age and experience in driving a vehicle and psychomotor skills in the context of automation
- Consumption of gasoline in vehicles equipped with an LPG retrofit system in real driving conditions
- Laboratory studies of the influence of the working position of the passenger vehicle air suspension on the vibration comfort of children transported in the child restraint system
- Route optimization for city cleaning vehicle
- Efficiency of electric vehicle interior heating systems at low ambient temperatures
- Model-based imputation of sound level data at thoroughfare using computational intelligence
- Research on the combustion process in the Fiat 1.3 Multijet engine fueled with rapeseed methyl esters
- Overview of the method and state of hydrogenization of road transport in the world and the resulting development prospects in Poland
- Tribological characteristics of polymer materials used for slide bearings
- Car reliability analysis based on periodic technical tests
- Special Issue: Terotechnology 2019 - Part II
- DOE Application for Analysis of Tribological Properties of the Al2O3/IF-WS2 Surface Layers
- The effect of the impurities spaces on the quality of structural steel working at variable loads
- Prediction of the parameters and the hot open die elongation forging process on an 80 MN hydraulic press
- Special Issue: AEVEC 2020
- Vocational Student's Attitude and Response Towards Experiential Learning in Mechanical Engineering
- Virtual Laboratory to Support a Practical Learning of Micro Power Generation in Indonesian Vocational High Schools
- The impacts of mediating the work environment on the mode choice in work trips
- Utilization of K-nearest neighbor algorithm for classification of white blood cells in AML M4, M5, and M7
- Car braking effectiveness after adaptation for drivers with motor dysfunctions
- Case study: Vocational student’s knowledge and awareness level toward renewable energy in Indonesia
- Contribution of collaborative skill toward construction drawing skill for developing vocational course
- Special Issue: Annual Engineering and Vocational Education Conference - Part II
- Vocational teachers’ perspective toward Technological Pedagogical Vocational Knowledge
- Special Issue: ICIMECE 2020 - Part I
- Profile of system and product certification as quality infrastructure in Indonesia
- Prediction Model of Magnetorheological (MR) Fluid Damper Hysteresis Loop using Extreme Learning Machine Algorithm
- A review on the fused deposition modeling (FDM) 3D printing: Filament processing, materials, and printing parameters
- Facile rheological route method for LiFePO4/C cathode material production
- Mosque design strategy for energy and water saving
- Epoxy resins thermosetting for mechanical engineering
- Estimating the potential of wind energy resources using Weibull parameters: A case study of the coastline region of Dar es Salaam, Tanzania
- Special Issue: CIRMARE 2020
- New trends in visual inspection of buildings and structures: Study for the use of drones
- Special Issue: ISERT 2021
- Alleviate the contending issues in network operating system courses: Psychomotor and troubleshooting skill development with Raspberry Pi
- Special Issue: Actual Trends in Logistics and Industrial Engineering - Part II
- The Physical Internet: A means towards achieving global logistics sustainability
- Special Issue: Modern Scientific Problems in Civil Engineering - Part I
- Construction work cost and duration analysis with the use of agent-based modelling and simulation
- Corrosion rate measurement for steel sheets of a fuel tank shell being in service
- The influence of external environment on workers on scaffolding illustrated by UTCI
- Allocation of risk factors for geodetic tasks in construction schedules
- Pedestrian fatality risk as a function of tram impact speed
- Technological and organizational problems in the construction of the radiation shielding concrete and suggestions to solve: A case study
- Finite element analysis of train speed effect on dynamic response of steel bridge
- New approach to analysis of railway track dynamics – Rail head vibrations
- Special Issue: Trends in Logistics and Production for the 21st Century - Part I
- Design of production lines and logistic flows in production
- The planning process of transport tasks for autonomous vans
- Modeling of the two shuttle box system within the internal logistics system using simulation software
- Implementation of the logistics train in the intralogistics system: A case study
- Assessment of investment in electric buses: A case study of a public transport company
- Assessment of a robot base production using CAM programming for the FANUC control system
- Proposal for the flow of material and adjustments to the storage system of an external service provider
- The use of numerical analysis of the injection process to select the material for the injection molding
- Economic aspect of combined transport
- Solution of a production process with the application of simulation: A case study
- Speedometer reliability in regard to road traffic sustainability
- Design and construction of a scanning stand for the PU mini-acoustic sensor
- Utilization of intelligent vehicle units for train set dispatching
- Special Issue: ICRTEEC - 2021 - Part I
- LVRT enhancement of DFIG-driven wind system using feed-forward neuro-sliding mode control
- Special Issue: Automation in Finland 2021 - Part I
- Prediction of future paths of mobile objects using path library
- Model predictive control for a multiple injection combustion model
- Model-based on-board post-injection control development for marine diesel engine
- Intelligent temporal analysis of coronavirus statistical data
Articles in the same Issue
- Regular Articles
- Electrochemical studies of the synergistic combination effect of thymus mastichina and illicium verum essential oil extracts on the corrosion inhibition of low carbon steel in dilute acid solution
- Adoption of Business Intelligence to Support Cost Accounting Based Financial Systems — Case Study of XYZ Company
- Techno-Economic Feasibility Analysis of a Hybrid Renewable Energy Supply Options for University Buildings in Saudi Arabia
- Optimized design of a semimetal gasket operating in flange-bolted joints
- Behavior of non-reinforced and reinforced green mortar with fibers
- Field measurement of contact forces on rollers for a large diameter pipe conveyor
- Development of Smartphone-Controlled Hand and Arm Exoskeleton for Persons with Disability
- Investigation of saturation flow rate using video camera at signalized intersections in Jordan
- The features of Ni2MnIn polycrystalline Heusler alloy thin films formation by pulsed laser deposition
- Selection of a workpiece clamping system for computer-aided subtractive manufacturing of geometrically complex medical models
- Development of Solar-Powered Water Pump with 3D Printed Impeller
- Identifying Innovative Reliable Criteria Governing the Selection of Infrastructures Construction Project Delivery Systems
- Kinetics of Carbothermal Reduction Process of Different Size Phosphate Rocks
- Plastic forming processes of transverse non-homogeneous composite metallic sheets
- Accelerated aging of WPCs Based on Polypropylene and Birch plywood Sanding Dust
- Effect of water flow and depth on fatigue crack growth rate of underwater wet welded low carbon steel SS400
- Non-invasive attempts to extinguish flames with the use of high-power acoustic extinguisher
- Filament wound composite fatigue mechanisms investigated with full field DIC strain monitoring
- Structural Timber In Compartment Fires – The Timber Charring and Heat Storage Model
- Technical and economic aspects of starting a selected power unit at low ambient temperatures
- Car braking effectiveness after adaptation for drivers with motor dysfunctions
- Adaptation to driver-assistance systems depending on experience
- A SIMULINK implementation of a vector shift relay with distributed synchronous generator for engineering classes
- Evaluation of measurement uncertainty in a static tensile test
- Errors in documenting the subsoil and their impact on the investment implementation: Case study
- Comparison between two calculation methods for designing a stand-alone PV system according to Mosul city basemap
- Reduction of transport-related air pollution. A case study based on the impact of the COVID-19 pandemic on the level of NOx emissions in the city of Krakow
- Driver intervention performance assessment as a key aspect of L3–L4 automated vehicles deployment
- A new method for solving quadratic fractional programming problem in neutrosophic environment
- Effect of fish scales on fabrication of polyester composite material reinforcements
- Impact of the operation of LNG trucks on the environment
- The effectiveness of the AEB system in the context of the safety of vulnerable road users
- Errors in controlling cars cause tragic accidents involving motorcyclists
- Deformation of designed steel plates: An optimisation of the side hull structure using the finite element approach
- Thermal-strength analysis of a cross-flow heat exchanger and its design improvement
- Effect of thermal collector configuration on the photovoltaic heat transfer performance with 3D CFD modeling
- Experimental identification of the subjective reception of external stimuli during wheelchair driving
- Failure analysis of motorcycle shock breakers
- Experimental analysis of nonlinear characteristics of absorbers with wire rope isolators
- Experimental tests of the antiresonance vibratory mill of a sectional movement trajectory
- Experimental and theoretical investigation of CVT rubber belt vibrations
- Is the cubic parabola really the best railway transition curve?
- Transport properties of the new vibratory conveyor at operations in the resonance zone
- Assessment of resistance to permanent deformations of asphalt mixes of low air void content
- COVID-19 lockdown impact on CERN seismic station ambient noise levels
- Review Articles
- FMEA method in operational reliability of forest harvesters
- Examination of preferences in the field of mobility of the city of Pila in terms of services provided by the Municipal Transport Company in Pila
- Enhancement stability and color fastness of natural dye: A review
- Special Issue: ICE-SEAM 2019 - Part II
- Lane Departure Warning Estimation Using Yaw Acceleration
- Analysis of EMG Signals during Stance and Swing Phases for Controlling Magnetorheological Brake applications
- Sensor Number Optimization Using Neural Network for Ankle Foot Orthosis Equipped with Magnetorheological Brake
- Special Issue: Recent Advances in Civil Engineering - Part II
- Comparison of STM’s reliability system on the example of selected element
- Technical analysis of the renovation works of the wooden palace floors
- Special Issue: TRANSPORT 2020
- Simulation assessment of the half-power bandwidth method in testing shock absorbers
- Predictive analysis of the impact of the time of day on road accidents in Poland
- User’s determination of a proper method for quantifying fuel consumption of a passenger car with compression ignition engine in specific operation conditions
- Analysis and assessment of defectiveness of regulations for the yellow signal at the intersection
- Streamlining possibility of transport-supply logistics when using chosen Operations Research techniques
- Permissible distance – safety system of vehicles in use
- Study of the population in terms of knowledge about the distance between vehicles in motion
- UAVs in rail damage image diagnostics supported by deep-learning networks
- Exhaust emissions of buses LNG and Diesel in RDE tests
- Measurements of urban traffic parameters before and after road reconstruction
- The use of deep recurrent neural networks to predict performance of photovoltaic system for charging electric vehicles
- Analysis of dangers in the operation of city buses at the intersections
- Psychological factors of the transfer of control in an automated vehicle
- Testing and evaluation of cold-start emissions from a gasoline engine in RDE test at two different ambient temperatures
- Age and experience in driving a vehicle and psychomotor skills in the context of automation
- Consumption of gasoline in vehicles equipped with an LPG retrofit system in real driving conditions
- Laboratory studies of the influence of the working position of the passenger vehicle air suspension on the vibration comfort of children transported in the child restraint system
- Route optimization for city cleaning vehicle
- Efficiency of electric vehicle interior heating systems at low ambient temperatures
- Model-based imputation of sound level data at thoroughfare using computational intelligence
- Research on the combustion process in the Fiat 1.3 Multijet engine fueled with rapeseed methyl esters
- Overview of the method and state of hydrogenization of road transport in the world and the resulting development prospects in Poland
- Tribological characteristics of polymer materials used for slide bearings
- Car reliability analysis based on periodic technical tests
- Special Issue: Terotechnology 2019 - Part II
- DOE Application for Analysis of Tribological Properties of the Al2O3/IF-WS2 Surface Layers
- The effect of the impurities spaces on the quality of structural steel working at variable loads
- Prediction of the parameters and the hot open die elongation forging process on an 80 MN hydraulic press
- Special Issue: AEVEC 2020
- Vocational Student's Attitude and Response Towards Experiential Learning in Mechanical Engineering
- Virtual Laboratory to Support a Practical Learning of Micro Power Generation in Indonesian Vocational High Schools
- The impacts of mediating the work environment on the mode choice in work trips
- Utilization of K-nearest neighbor algorithm for classification of white blood cells in AML M4, M5, and M7
- Car braking effectiveness after adaptation for drivers with motor dysfunctions
- Case study: Vocational student’s knowledge and awareness level toward renewable energy in Indonesia
- Contribution of collaborative skill toward construction drawing skill for developing vocational course
- Special Issue: Annual Engineering and Vocational Education Conference - Part II
- Vocational teachers’ perspective toward Technological Pedagogical Vocational Knowledge
- Special Issue: ICIMECE 2020 - Part I
- Profile of system and product certification as quality infrastructure in Indonesia
- Prediction Model of Magnetorheological (MR) Fluid Damper Hysteresis Loop using Extreme Learning Machine Algorithm
- A review on the fused deposition modeling (FDM) 3D printing: Filament processing, materials, and printing parameters
- Facile rheological route method for LiFePO4/C cathode material production
- Mosque design strategy for energy and water saving
- Epoxy resins thermosetting for mechanical engineering
- Estimating the potential of wind energy resources using Weibull parameters: A case study of the coastline region of Dar es Salaam, Tanzania
- Special Issue: CIRMARE 2020
- New trends in visual inspection of buildings and structures: Study for the use of drones
- Special Issue: ISERT 2021
- Alleviate the contending issues in network operating system courses: Psychomotor and troubleshooting skill development with Raspberry Pi
- Special Issue: Actual Trends in Logistics and Industrial Engineering - Part II
- The Physical Internet: A means towards achieving global logistics sustainability
- Special Issue: Modern Scientific Problems in Civil Engineering - Part I
- Construction work cost and duration analysis with the use of agent-based modelling and simulation
- Corrosion rate measurement for steel sheets of a fuel tank shell being in service
- The influence of external environment on workers on scaffolding illustrated by UTCI
- Allocation of risk factors for geodetic tasks in construction schedules
- Pedestrian fatality risk as a function of tram impact speed
- Technological and organizational problems in the construction of the radiation shielding concrete and suggestions to solve: A case study
- Finite element analysis of train speed effect on dynamic response of steel bridge
- New approach to analysis of railway track dynamics – Rail head vibrations
- Special Issue: Trends in Logistics and Production for the 21st Century - Part I
- Design of production lines and logistic flows in production
- The planning process of transport tasks for autonomous vans
- Modeling of the two shuttle box system within the internal logistics system using simulation software
- Implementation of the logistics train in the intralogistics system: A case study
- Assessment of investment in electric buses: A case study of a public transport company
- Assessment of a robot base production using CAM programming for the FANUC control system
- Proposal for the flow of material and adjustments to the storage system of an external service provider
- The use of numerical analysis of the injection process to select the material for the injection molding
- Economic aspect of combined transport
- Solution of a production process with the application of simulation: A case study
- Speedometer reliability in regard to road traffic sustainability
- Design and construction of a scanning stand for the PU mini-acoustic sensor
- Utilization of intelligent vehicle units for train set dispatching
- Special Issue: ICRTEEC - 2021 - Part I
- LVRT enhancement of DFIG-driven wind system using feed-forward neuro-sliding mode control
- Special Issue: Automation in Finland 2021 - Part I
- Prediction of future paths of mobile objects using path library
- Model predictive control for a multiple injection combustion model
- Model-based on-board post-injection control development for marine diesel engine
- Intelligent temporal analysis of coronavirus statistical data