Analysis of EMG Signals during Stance and Swing Phases for Controlling Magnetorheological Brake applications
-
 ,
,

Abstract
The development of ankle foot orthoses (AFO) for lower limb rehabilitation have received significant attention over the past decades. Recently, passive AFO equipped with magnetorheological brake had been developed based on ankle angle and electromyography (EMG) signals. Nonetheless, the EMG signals were categorized in stance and swing phases through visual observation as the signals are stochastic. Therefore, this study aims to classify the pattern of EMG signals during stance and swing phases. Seven-time domains features will be extracted and fed into artificial neural network (ANN) as a classifier. Two different training algorithms of ANN namely Levenberg-Marquardt (LM) and Scaled Conjugate Gradient (SCG) will be applied. As number of inputs will affect the classification performance of ANN, different number of input features will be employed. In this study, three participants were recruited and walk on the treadmills for 60 seconds by constant the speed. The ANN model was designed with 2, 10, 12, and 14 inputs features with LM and SCG training algorithms. Then, the ANN was trained ten times and the performances of each inputs features were measured using classification rate of training, testing, validation and overall. This study found that all the inputs with LM training algorithm gained more than 2% average classification rate than SCG training algorithm. On the other hand, classification accuracy of 10, 12 and 14 inputs were 5% higher than 2 inputs. It can be concluded that LM training algorithm of ANN was performed better than SCG algorithm with at least 10 inputs.
1 Introduction
Stroke may cause locomotion impairment and affect human body in different ways that can lead to cause of death. According to National Stroke Association of Malaysia, approximately 40,000 of stroke cases are reported each year [1]. A syndrome known as foot drop frequently occurs unilaterally in connection with stroke. It happens due to partial or total central paralysis of the muscles on lower leg. Foot drop patients unable to control the movement at the ankle inward and outward as they suffered from uncontrolled plantar flexion and dysfunctional dorsiflexion that effect the gait pattern. The swinging action and inclination of a body for foot drop patients become larger than normal gait during swing phase in order to avoid a losing balance on the ground. Consequently, the stance phase is not detected. An enhancement on gait pattern of foot drop patients could be done through physical therapy during rehabilitations.
Rehabilitation is a major therapeutic approach as the motor performance functional deficits of patient can be maximized and minimized, respectively. Generally, physiotherapy and rehabilitation are carried out through repeating the exercises many times with the assistance of one or more physiotherapists. Yet, the process of recovery might be delayed due to the limited number of therapists. Moher [2] discovered that an assistance through automated technical system enhance the physical activities especially during rehabilitation. He introduced the control system through Human Machine Interface (HMI) and effectively demonstrated the systems used in the mechanism of lower-limb orthoses. HMI such as orthoses have been designed with different types of actuators, interfaces, and mechanical structures as practical complementary systems for therapists to handle impaired joints or limbs [3].
Nowadays, ankle foot orthoses (AFO) is mostly prescribed to support the movement of lower leg which help individuals to balance their body and walk in a more natural way. It was found an improvement was observed on the ankle kinematics in early stance, toe-off and swing phase but no effects were seen for knee kinematics in terms of swing or hip kinematics [4]. In addition, there exists a short-term effect on ankle movement early after stroke using AFO [5]. The development of AFO can be grouped into three types of joint such as rigid, flexible rigid, and articulated AFO. For rigid and flexible AFO ankle joint, the joint was fixed and more flexible, respectively.On the other hand, the articulated AFO has a freely rotating ankle joint. The mechanical properties of the articulated AFO are more controllable compared to rigid and flexible rigid of AFO as it equipped with an actuator [6].
The development of AFO based on the selection of actuator that can be divided into two types namely active and passive. Active AFO support the leg movement using electronic actuators such as direct current motors, pneumatics, solenoids, and springs. Meanwhile, the passive AFO assist the leg movements using actuators such as magnetorheological (MR) dampers and brakes. Passive AFO are had advantages in terms of weight optimization compared with active AFO. In preventing the foot drop, passive AFO become the main concern as the movement generator is not needed as because the foot drop patient able to move it by itself except during dorsiflexion. Therefore, a controllable AFO with a compact MR fluid brake had been developed based on accelerometer and angle of ankle for gait training purpose [7]. By using similar approach of control, work done by Adiputra et al. [8] replaced the accelerometer with electromyography (EMG) signals and reduced the gait phases from three to two and demonstrated the system was applicable in prevention of foot drop. Nonetheless, the main issue arises on interpretation of EMG signals during two phases namely stance and swing phases as they categorized the signals through visual observation.
The EMG signals was reported to be useful for gait phase detection since the lower extremity muscle activity occurs in a repeatable way during gait cycle [9]. They developed an EMG based control system for passive AFO as shown in Figure 1. The EMG signals reflect the electric current that emanate from body muscles during contraction and/or relaxation. For signal processing, there are three stages namely pre-processing, feature extraction and classification. In order to obtain higher classification accuracy, the selected features are the main kernel used in analyzing EMG signals [10]. Although many research works have mainly tried to explore and propose numerous EMG signals classification, there are only a few works that examined the appropriate features set to be extracted especially for gait event, stance and swing phases.

Overview of EMG based control system
Features in time domain (TD) have been widely adopted because they do not need a transformation, as they are calculated based on the raw EMG time series and computational complexity is low. Previous work had reported that different accuracies were obtained with single and multiple of TD features. For single feature, mean absolute value (MAV) is the most popular features and recommended in classifying EMG signals [11]. Another TD feature such as maximum amplitude (MAX), standard deviation (SD), and root mean square (RMS) had shown a good relationship with contractions of EMG signals [12]. Meanwhile, multiple feature of MAV, variance (VAR),wave-form length (WL), slope sign changes and 4th autoregressive model identified the boundary locations for different gait cycles [13]. In classifying the EMG signals during stance and swing phases, it was found that five TD features, MAV, SD, RMS, integrated EMG (IEMG), and WL gained higher accuracy than single feature of MAV based on artificial neural network (ANN) classifier [9]. However, combination of MAV, SD, RMS, IEMG, WL, VAR, and MAX features have not been explored. Thus, this study aims to extend the research by added another two TD features, VAR and MAX and fed into ANN. As the different number of inputs and training algorithm effect the performance of ANN, the single and multiple feature sets are compared with Levenberg-Marquardt (LM) and Scaled Conjugate Gradient (SCG) training algorithm.
2 Methodology
Three healthy male subject age between 22 to 25 years old from Shibaura Institute of Technology’s student population were recruited with no history of nerve injuries that may affected the walking pattern. This investigation focused on the lower leg and the participants were asked to do some movements related to the selected muscles. In this study, the detection of stance and swing phases are based on the heel strike (HS) and toe off (TO) collected from the footswitch data. Two force sensing resistors (FSR) of footswitch devices were placed under the sole of the foot beneath the hallux and heel after cleaning with wet tissues. A tape was placed around the FSR for extra protection. The footswitch data were recorded using Load Switch System (DKH, Japan) device with an input range of ± 10V and activation force 0.3 N. The placement of both footswitch and EMG signals are shown in Figure 2.
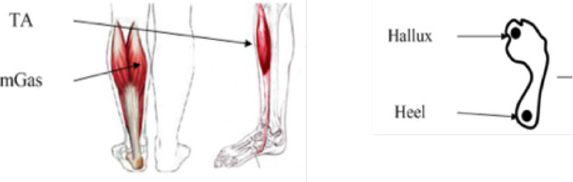
Electrode placement of footswitch and EMG signals
Moving on, the EMG signals were recorded from tibialis anterior (TA) and medial gastrocnemius (mGas) muscles with a reference electrode at the patella, following the Surface Electromyography for the Non-Invasive Assessment recommendations. To detect the activation of muscle contraction and verify the accuracy of the footswitch’s outputs, the subjects had to perform dorsiflexion and plantar flexion. The output of footswitch data become the reference of stance and swing phases for EMG signals. The EMG signals were collected by using two-channelled EMG device (Nihon Kohden, Japan) and amplified by multichannel amplifier with bandwidth filtering from 15 to 1000 Hz. Both EMG signals and footswitch data were connected to 64 Ch analog-to-digital converters (Model ZO-928, NAC, Japan) and the sampling rate were set at 1000 Hz using the Cortex software. Then, the participants were instructed to walk on the treadmills for 60 seconds with a constant speed as shown Figure 3.

Experimental setup of this study
The classification accuracy of EMG signals depends greatly on the features extracted. There are seven TD features were incorporated into this study which are RMS, SD, MAV, IEMG, WL, VAR and MAX. As Oskoei and Hu [14] proved that the performance of four combined features are better than a single or two features for upper limb movement, a single MAV features were compared with multiple set of TD features and the details are shown in Table 1. The TD features of TA and mGas muscles during stance and swing phases in 30 cycles for each subject were extracted. In total, 35000 datasets were computed and fed into the classifier.
All TD feature sets used in this study
| TD Features | Symbol |
|---|---|
| MAV | C |
| RMS, SD, MAV, IEMG, WL | Group 1 |
| RMS, SD, MAV, IEMG, WL, VAR | Group 4 |
| RMS, MAV, SD, IEMG, WL, MAX | Group 5 |
| RMS, MAV, SD, IEMG, WL, MAX, VAR | Group 6 |
The information extracted from the features serves as input for the classifiers. A classifier function is to map the pattern and match the EMG signals appropriately in determining the final output. Machine learning is closely related with the study and construction of algorithms that can learn from building model and make predictions on data. An application of ANN began to appear for pattern recognition and classification tasks as it is suitable for modelling nonlinear data especially for EMG signals due to its ability to cover the distinctions among different conditions. The capability of ANN had been proven for upper limb movement with 91.2% classification accuracy by using five TD features [15]. ANN also able to discriminate different hand motions [16], neuromuscular diseases [17], and risk of preterm deliveries using EMG signals [18].
Multilayer perceptron of ANN was used in this study to evaluate the performance of each TD features. The ANN model consists three layers of nodes needed which are input layer, hidden layer and output layer. Input vector I with L rows can be denoted by i1, i2, . . . , iR. Each input was weighted by correlative component w1,1, w2,1, . . . , wS1,L of the weight matrix, W1 which S1 is neurons number. As aforementioned, two types of training algorithm that were employed in this study; LM and SCG. The training input data were randomly divided: 70% for training, 15% for validation and 15% for testing. The ANN model was designed with 2, 10, 12, and 14 inputs features with LM and SCG training algorithm. The ANN network for each of the TD features was trained ten times and the classification performances for training, testing, validation and overall were recorded.
3 Results and discussions
An example confusion matrix for LM and SCG training algorithm of ANN model for Group 6 are shown in Figure 4. The target class of the confusion matrix were denoted as number 1 and 2 to represent the output class as stance and swing phases, respectively. The light green cells provide the number of correctly classified while red cells for unclassified numbers. In addition, average classification was showed in grey cell while the total average of classification rate showed in blue cells. The percentage in each cell shows the ratio of the number with total number of movements. It can be seen that the percentage difference for training, test, validation and overall were small.

The confusion matrix for Group 6 of (a) LM and (b) SCG training algorithm
Table 2 and 3 represent the classification accuracy of each TD feature sets for ten times by using LM and SCG training algorithm, respectively. In the table, the classification rate was divided into four; training, validation, test and overall. The highest value of each train for each TD feature sets were bolded. For both LM and SCG training algorithm, the highest value was gained by Group 6 TD features with 96.0% and 92.9%, respectively. Meanwhile, the classification accuracy of was the lowest with 88.8% and 87.9% for LM and SCG training algorithm, respectively.
Classification accuracy for each TD feature sets using LM training algorithm
| Classification Rate (%) |
||||
|---|---|---|---|---|
| TD Features | Training | Validation | Testing | Overall |
| 88.1 | 87.9 | 87.9 | 88.1 | |
| 88.9 | 88.9 | 88.3 | 88.8 | |
| 87.9 | 88.2 | 86.9 | 87.8 | |
| 88.5 | 87.8 | 87.6 | 88.2 | |
| C | 88.2 | 87.7 | 87.9 | 88.1 |
| 88.0 | 88.4 | 87.9 | 88.1 | |
| 88.4 | 87.8 | 87.8 | 88.2 | |
| 88.1 | 88.6 | 88.6 | 88.2 | |
| 88.3 | 88.3 | 87.3 | 88.1 | |
| 88.4 | 88.4 | 88.0 | 88.3 | |
| 93.8 | 93.4 | 93.3 | 93.7 | |
| 94.7 | 93.8 | 94.7 | 94.6 | |
| 93.9 | 94.3 | 93.6 | 93.9 | |
| 93.9 | 93.7 | 94.1 | 93.9 | |
| GROUP 1 | 94.0 | 94.4 | 93.9 | 94.0 |
| 93.4 | 93.6 | 93.2 | 93.4 | |
| 94.4 | 94.0 | 93.4 | 94.2 | |
| 93.8 | 94.3 | 94.4 | 94.0 | |
| 93.8 | 93.4 | 94.0 | 93.8 | |
| 95.0 | 95.0 | 94.4 | 94.9 | |
| 94.6 | 94.5 | 94.3 | 94.5 | |
| 94.2 | 94.5 | 93.7 | 94.2 | |
| 91.6 | 91.3 | 91.9 | 91.6 | |
| 94.8 | 94.9 | 94.7 | 94.7 | |
| GROUP 4 | 94.6 | 94.9 | 94.1 | 94.6 |
| 95.0 | 94.8 | 94.4 | 94.9 | |
| 94.6 | 94.5 | 94.4 | 94.6 | |
| 94.2 | 94.2 | 94.0 | 94.2 | |
| 94.7 | 94.9 | 94.1 | 94.6 | |
| 94.5 | 94.6 | 93.6 | 94.4 | |
| 92.9 | 93.3 | 92.9 | 93.0 | |
| 94.8 | 94.6 | 94.6 | 94.8 | |
| 94.2 | 93.5 | 93.4 | 94.0 | |
| 94.9 | 94.7 | 94.4 | 94.8 | |
| GROUP 5 | 94.3 | 93.9 | 94.0 | 94.2 |
| 94.1 | 94.2 | 93.6 | 94.1 | |
| 95.1 | 94.9 | 94.3 | 94.8 | |
| 94.6 | 94.0 | 94.0 | 94.4 | |
| 94.3 | 94.4 | 94.0 | 94.2 | |
| 94.1 | 93.9 | 93.9 | 94.0 | |
| 95.5 | 95.4 | 95.4 | 95.5 | |
| 94.4 | 94.0 | 93.7 | 94.2 | |
| 94.2 | 93.3 | 93.9 | 94.0 | |
| 95.8 | 96.1 | 95.5 | 95.8 | |
| GROUP 6 | 96.1 | 95.8 | 95.6 | 96.0 |
| 95.0 | 94.7 | 94.9 | 95.0 | |
| 94.2 | 93.8 | 94.0 | 94.1 | |
| 95.9 | 95.3 | 94.6 | 95.6 | |
| 93.7 | 93.1 | 93.5 | 93.6 | |
| 94.5 | 94.9 | 94.4 | 94.6 | |
Classification accuracy for each TD feature sets using SCG training algorithm
| TD Features | Classification Rate (%) |
|||
|---|---|---|---|---|
| Training | Validation | Testing | Overall | |
| 85.4 | 85.4 | 85.4 | 85.4 | |
| 87.1 | 87.3 | 87.9 | 87.3 | |
| 87.9 | 87.5 | 88.4 | 87.9 | |
| 87.8 | 87.4 | 87.7 | 87.7 | |
| C | 86.2 | 86.2 | 85.9 | 86.2 |
| 85.7 | 85.7 | 86.4 | 85.8 | |
| 85.6 | 86.1 | 85.9 | 85.7 | |
| 87.6 | 87.7 | 87.0 | 87.6 | |
| 87.8 | 87.8 | 87.7 | 87.8 | |
| 85.2 | 84.5 | 85.1 | 85.1 | |
| 92.1 | 92.6 | 92.2 | 92.2 | |
| 92.6 | 92.5 | 92.0 | 92.5 | |
| 92.6 | 92.5 | 92.7 | 92.6 | |
| 91.7 | 91.6 | 91.8 | 91.7 | |
| GROUP 1 | 92.6 | 92.2 | 92.3 | 92.5 |
| 92.0 | 91.9 | 92.4 | 92.5 | |
| 92.6 | 91.7 | 91.2 | 91.8 | |
| 92.5 | 92.5 | 91.6 | 92.4 | |
| 93.4 | 93.0 | 93.5 | 93.4 | |
| 92.9 | 92.4 | 92.1 | 92.7 | |
| 92.0 | 92.1 | 92.0 | 92.0 | |
| 91.9 | 91.6 | 92.1 | 91.9 | |
| 92.8 | 92.8 | 92.9 | 92.9 | |
| 91.9 | 91.6 | 91.8 | 91.9 | |
| GROUP 4 | 92.8 | 92.4 | 92.6 | 92.7 |
| 92.5 | 92.6 | 92.7 | 92.5 | |
| 93.0 | 93.4 | 93.0 | 93.0 | |
| 91.8 | 91.9 | 92.0 | 91.8 | |
| 92.0 | 91.5 | 92.8 | 92.1 | |
| 90.9 | 90.7 | 90.6 | 90.8 | |
| 92.3 | 91.9 | 92.2 | 92.2 | |
| 92.7 | 92.7 | 91.9 | 92.6 | |
| 91.9 | 92.2 | 92.5 | 92.0 | |
| 91.3 | 91.1 | 91.5 | 91.3 | |
| GROUP 5 | 91.5 | 91.8 | 91.5 | 91.5 |
| 91.6 | 92.0 | 91.7 | 91.7 | |
| 92.5 | 92.5 | 91.6 | 92.4 | |
| 91.9 | 92.0 | 92.1 | 91.9 | |
| 92.0 | 92.1 | 91.9 | 92.0 | |
| 92.0 | 92.4 | 91.7 | 92.0 | |
| 92.5 | 92.3 | 93.1 | 92.6 | |
| 92.1 | 92.3 | 92.9 | 92.3 | |
| 92.6 | 92.7 | 92.5 | 92.6 | |
| 92.7 | 91.7 | 92.9 | 92.6 | |
| GROUP 6 | 92.3 | 92.2 | 91.9 | 92.2 |
| 92.0 | 92.4 | 92.2 | 92.1 | |
| 92.2 | 91.5 | 91.9 | 92.1 | |
| 92.2 | 92 | 91.9 | 92.0 | |
| 92.0 | 91.8 | 92.1 | 92.0 | |
| 93.0 | 93.0 | 92.6 | 92.9 | |
Figure 5 compared the average classification performance of all TD features with different training algorithm of ANN. Group 1, Group 4, Group 5 and Group 6 features gained more than 92% of classification accuracy while C features gained less than 87% for SCG training algorithm. With 5% of difference, it can be concluded that C features was not suggested for represent the EMG signals for gait phases but performed well for hand movement as reported by Phinyomark et al. [11]. Consistent with the literature, this research found that multiple TD features performed better than single TD features [9]. One interesting finding of this study is the difference of classification accuracy between a combination of 5, 6 and 7 TD features were less than 1%. Thus, the combination of 5 TD features which 10 inputs would be enough to discriminate the stance and swing phases. In other words, increasing the number of inputs more than 10 does not affect the performance of ANN model. Nevertheless, the training algorithm of ANN model influenced the classification accuracy as LM training algorithm was approximately more than 2% higher than SCG training algorithm for all TD features. These results are in agreement with work done by Ibrahimy et al. for discriminate the hand movement [16].

Classification accuracy for all TD features
4 Conclusions
The aim of the current study was to propose a new TD features sets in classifying EMG signals during stance and swing phases. This study has identified multiple TD features, RMS, MAV, SD, IEMG, WL, MAX and VAR were suggested than a single TD feature especially MAV. Additionally, the LM training algorithm of ANN was performed better than SCG algorithm with at least 10 inputs. This approach will prove useful in expanding our understanding of ANN model with different number of inputs. Also, the findings will be of interest in development of AFO to control the actuator. Even though ANN has shown its usefulness in classifying EMG signals for gait event detection, further research might improve the classification accuracy using other TD features with different multiple feature sets and explore other classifier such as support vector machines.
Acknowledgement
The work presented in this study is funded by Ministry of Higher Education Malaysia under Fundamental Research Grant Scheme, FRGS/1/2019/TK08/UTM/02/10 (Vot No. 5F204) and Universiti Teknologi Malaysia Encouragement Grant, UTMER (Vot No. 18J26).
References
[1] nasam.org. [Internet]. NASAM: Stroke prevention [cited 2017 Dec 25]. Available from: https://www.nasam.org/what-is-stroke/Search in Google Scholar
[2] Mosher R. Handyman to Hardiman. Technical Report, SAE Technical Paper; 1967. https://doi.org/10.4271/67008810.4271/670088Search in Google Scholar
[3] Yan T, Cempini M, Oddo CM, Vitiello N. Review of assistive strategies in powered lower-limb orthoses and exoskeletons. Robotics and Autonomous Sys; 2015. pp. 120–36.10.1016/j.robot.2014.09.032Search in Google Scholar
[4] Tyson SF, Sadeghi-Demneh E, Nester CJ. A systematic review and meta-analysis of the effect of an ankle-foot orthosis on gait biomechanics after stroke. Clin Rehabil. 2013 Oct;27(10):879–91.10.1177/0269215513486497Search in Google Scholar PubMed
[5] Nikamp CD, Hobbelink MS, van der Palen J, Hermens HJ, Rietman JS, Buurke JH. A randomized controlled trial on providing ankle-foot orthoses in patients with (sub-)acute stroke: short-term kinematic and spatiotemporal effects and effects of timing. Gait Posture. 2017 Jun;55:15–22.10.1016/j.gaitpost.2017.03.028Search in Google Scholar PubMed
[6] Adiputra D, Nazmi N, Bahiuddin I, Ubaidillah U, Imaduddin F, Rahman MA, et al. Review on Ankle Foot Orthosis Mechanical Properties Control for Gait Assistance. Actuators. 2019;1–28.10.3390/act8010010Search in Google Scholar
[7] Kikuchi T, Tanida S, Otsuki K, Yasuda T, Furusho J. Development of Third-Generation Intelligently Controllable Ankle-Foot Orthosis with Compact MR Fluid Brake. IEEE International Conference on Robotics and Automation. 2010;2209–2214.10.1109/ROBOT.2010.5509729Search in Google Scholar
[8] Adiputra D, Rahman MA. Ubaidillah, Mazlan SA, Nazmi N, Shabdin MK, Kobayashi J, Mohammed Ariff MH. Control Reference Parameter for Stance Assistance Using a Passive Controlled Ankle Foot Orthosis—A Preliminary Study. Appl Sci (Basel). 2019;•••:1–13.10.3390/app9204416Search in Google Scholar
[9] Nazmi N, Rahman MA, Ariff MH, Ahmad SA. Generalization of ANN Model in Classifying Stance and Swing Phases of Gait using EMG Signals. IEEE-EMBS Conference on Biomedical Engineering and Sciences, 2018;461-466.10.1109/IECBES.2018.8626626Search in Google Scholar
[10] Nazmi N, Mazlan SA, Zamzuri H, Rahman MA. Fitting distribution for electromyography and electroencephalography signals based on goodness-of-fit tests. Procedia Comput Sci. 2015;76:468–73.10.1016/j.procs.2015.12.317Search in Google Scholar
[11] Phinyomark A, Phukpattaranont P, Limsakul C. Feature reduction and selection for EMG signal classification. Expert Syst Appl. 2012;39(8):7420–31.10.1016/j.eswa.2012.01.102Search in Google Scholar
[12] Daud WMBW, Yahya AB, Horng CS, Sulaima MF, Sudirman R. Features Extraction of Electromyography Signals in Time Domain on Biceps Brachii Muscle. International Journal of Modeling and Optimization. 2013;515–519. https://doi.org/10.7763/IJMO.2013.V3.33210.7763/IJMO.2013.V3.332Search in Google Scholar
[13] Joshi CD, Lahiri U, Thakor N. Classification of gait phases from lower limb EMG Application to exoskeleton orthosis. IEEE Point-of-Care Healthcare Technologies; 2013. pp. 228–31.10.1109/PHT.2013.6461326Search in Google Scholar
[14] Oskoei MA, Hu H. Support vector machine-based classification scheme for myoelectric control applied to upper limb. IEEE Trans Biomed Eng. 2008 Aug;55(8):1956–65.10.1109/TBME.2008.919734Search in Google Scholar PubMed
[15] Hudgins B, Parker P, Scott RN. A new strategy for multifunction myoelectric control. IEEE Trans Biomed Eng. 1993 Jan;40(1):82–94.10.1109/10.204774Search in Google Scholar PubMed
[16] Ibrahimy MI, Ahsan MR, Khalifa OO. Design and Optimization of Levenberg-Marquardt based Neural Network Classifier for EMG Signals to Identify Hand Motions. Meas Sci Rev. 2013;13(3):142–51.10.2478/msr-2013-0023Search in Google Scholar
[17] Elamvazuthi I, Duy N, Ali Z, Su S, Ahamed Khan M, Parasuraman S. Electromyography (EMG) based Classification of Neuromuscular Disorders using Multi-Layer Perceptron. Procedia Comput Sci. 2015;76:223–8.10.1016/j.procs.2015.12.346Search in Google Scholar
[18] Diab MO, El-Merhie A, El-Halabi N, Khoder L. Classification of uterine EMG signals using supervised classification method. J Biomed Sci Eng. 2010;03(09):837–42.10.4236/jbise.2010.39113Search in Google Scholar
© 2021 N. Nazmi et al., published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Regular Articles
- Electrochemical studies of the synergistic combination effect of thymus mastichina and illicium verum essential oil extracts on the corrosion inhibition of low carbon steel in dilute acid solution
- Adoption of Business Intelligence to Support Cost Accounting Based Financial Systems — Case Study of XYZ Company
- Techno-Economic Feasibility Analysis of a Hybrid Renewable Energy Supply Options for University Buildings in Saudi Arabia
- Optimized design of a semimetal gasket operating in flange-bolted joints
- Behavior of non-reinforced and reinforced green mortar with fibers
- Field measurement of contact forces on rollers for a large diameter pipe conveyor
- Development of Smartphone-Controlled Hand and Arm Exoskeleton for Persons with Disability
- Investigation of saturation flow rate using video camera at signalized intersections in Jordan
- The features of Ni2MnIn polycrystalline Heusler alloy thin films formation by pulsed laser deposition
- Selection of a workpiece clamping system for computer-aided subtractive manufacturing of geometrically complex medical models
- Development of Solar-Powered Water Pump with 3D Printed Impeller
- Identifying Innovative Reliable Criteria Governing the Selection of Infrastructures Construction Project Delivery Systems
- Kinetics of Carbothermal Reduction Process of Different Size Phosphate Rocks
- Plastic forming processes of transverse non-homogeneous composite metallic sheets
- Accelerated aging of WPCs Based on Polypropylene and Birch plywood Sanding Dust
- Effect of water flow and depth on fatigue crack growth rate of underwater wet welded low carbon steel SS400
- Non-invasive attempts to extinguish flames with the use of high-power acoustic extinguisher
- Filament wound composite fatigue mechanisms investigated with full field DIC strain monitoring
- Structural Timber In Compartment Fires – The Timber Charring and Heat Storage Model
- Technical and economic aspects of starting a selected power unit at low ambient temperatures
- Car braking effectiveness after adaptation for drivers with motor dysfunctions
- Adaptation to driver-assistance systems depending on experience
- A SIMULINK implementation of a vector shift relay with distributed synchronous generator for engineering classes
- Evaluation of measurement uncertainty in a static tensile test
- Errors in documenting the subsoil and their impact on the investment implementation: Case study
- Comparison between two calculation methods for designing a stand-alone PV system according to Mosul city basemap
- Reduction of transport-related air pollution. A case study based on the impact of the COVID-19 pandemic on the level of NOx emissions in the city of Krakow
- Driver intervention performance assessment as a key aspect of L3–L4 automated vehicles deployment
- A new method for solving quadratic fractional programming problem in neutrosophic environment
- Effect of fish scales on fabrication of polyester composite material reinforcements
- Impact of the operation of LNG trucks on the environment
- The effectiveness of the AEB system in the context of the safety of vulnerable road users
- Errors in controlling cars cause tragic accidents involving motorcyclists
- Deformation of designed steel plates: An optimisation of the side hull structure using the finite element approach
- Thermal-strength analysis of a cross-flow heat exchanger and its design improvement
- Effect of thermal collector configuration on the photovoltaic heat transfer performance with 3D CFD modeling
- Experimental identification of the subjective reception of external stimuli during wheelchair driving
- Failure analysis of motorcycle shock breakers
- Experimental analysis of nonlinear characteristics of absorbers with wire rope isolators
- Experimental tests of the antiresonance vibratory mill of a sectional movement trajectory
- Experimental and theoretical investigation of CVT rubber belt vibrations
- Is the cubic parabola really the best railway transition curve?
- Transport properties of the new vibratory conveyor at operations in the resonance zone
- Assessment of resistance to permanent deformations of asphalt mixes of low air void content
- COVID-19 lockdown impact on CERN seismic station ambient noise levels
- Review Articles
- FMEA method in operational reliability of forest harvesters
- Examination of preferences in the field of mobility of the city of Pila in terms of services provided by the Municipal Transport Company in Pila
- Enhancement stability and color fastness of natural dye: A review
- Special Issue: ICE-SEAM 2019 - Part II
- Lane Departure Warning Estimation Using Yaw Acceleration
- Analysis of EMG Signals during Stance and Swing Phases for Controlling Magnetorheological Brake applications
- Sensor Number Optimization Using Neural Network for Ankle Foot Orthosis Equipped with Magnetorheological Brake
- Special Issue: Recent Advances in Civil Engineering - Part II
- Comparison of STM’s reliability system on the example of selected element
- Technical analysis of the renovation works of the wooden palace floors
- Special Issue: TRANSPORT 2020
- Simulation assessment of the half-power bandwidth method in testing shock absorbers
- Predictive analysis of the impact of the time of day on road accidents in Poland
- User’s determination of a proper method for quantifying fuel consumption of a passenger car with compression ignition engine in specific operation conditions
- Analysis and assessment of defectiveness of regulations for the yellow signal at the intersection
- Streamlining possibility of transport-supply logistics when using chosen Operations Research techniques
- Permissible distance – safety system of vehicles in use
- Study of the population in terms of knowledge about the distance between vehicles in motion
- UAVs in rail damage image diagnostics supported by deep-learning networks
- Exhaust emissions of buses LNG and Diesel in RDE tests
- Measurements of urban traffic parameters before and after road reconstruction
- The use of deep recurrent neural networks to predict performance of photovoltaic system for charging electric vehicles
- Analysis of dangers in the operation of city buses at the intersections
- Psychological factors of the transfer of control in an automated vehicle
- Testing and evaluation of cold-start emissions from a gasoline engine in RDE test at two different ambient temperatures
- Age and experience in driving a vehicle and psychomotor skills in the context of automation
- Consumption of gasoline in vehicles equipped with an LPG retrofit system in real driving conditions
- Laboratory studies of the influence of the working position of the passenger vehicle air suspension on the vibration comfort of children transported in the child restraint system
- Route optimization for city cleaning vehicle
- Efficiency of electric vehicle interior heating systems at low ambient temperatures
- Model-based imputation of sound level data at thoroughfare using computational intelligence
- Research on the combustion process in the Fiat 1.3 Multijet engine fueled with rapeseed methyl esters
- Overview of the method and state of hydrogenization of road transport in the world and the resulting development prospects in Poland
- Tribological characteristics of polymer materials used for slide bearings
- Car reliability analysis based on periodic technical tests
- Special Issue: Terotechnology 2019 - Part II
- DOE Application for Analysis of Tribological Properties of the Al2O3/IF-WS2 Surface Layers
- The effect of the impurities spaces on the quality of structural steel working at variable loads
- Prediction of the parameters and the hot open die elongation forging process on an 80 MN hydraulic press
- Special Issue: AEVEC 2020
- Vocational Student's Attitude and Response Towards Experiential Learning in Mechanical Engineering
- Virtual Laboratory to Support a Practical Learning of Micro Power Generation in Indonesian Vocational High Schools
- The impacts of mediating the work environment on the mode choice in work trips
- Utilization of K-nearest neighbor algorithm for classification of white blood cells in AML M4, M5, and M7
- Car braking effectiveness after adaptation for drivers with motor dysfunctions
- Case study: Vocational student’s knowledge and awareness level toward renewable energy in Indonesia
- Contribution of collaborative skill toward construction drawing skill for developing vocational course
- Special Issue: Annual Engineering and Vocational Education Conference - Part II
- Vocational teachers’ perspective toward Technological Pedagogical Vocational Knowledge
- Special Issue: ICIMECE 2020 - Part I
- Profile of system and product certification as quality infrastructure in Indonesia
- Prediction Model of Magnetorheological (MR) Fluid Damper Hysteresis Loop using Extreme Learning Machine Algorithm
- A review on the fused deposition modeling (FDM) 3D printing: Filament processing, materials, and printing parameters
- Facile rheological route method for LiFePO4/C cathode material production
- Mosque design strategy for energy and water saving
- Epoxy resins thermosetting for mechanical engineering
- Estimating the potential of wind energy resources using Weibull parameters: A case study of the coastline region of Dar es Salaam, Tanzania
- Special Issue: CIRMARE 2020
- New trends in visual inspection of buildings and structures: Study for the use of drones
- Special Issue: ISERT 2021
- Alleviate the contending issues in network operating system courses: Psychomotor and troubleshooting skill development with Raspberry Pi
- Special Issue: Actual Trends in Logistics and Industrial Engineering - Part II
- The Physical Internet: A means towards achieving global logistics sustainability
- Special Issue: Modern Scientific Problems in Civil Engineering - Part I
- Construction work cost and duration analysis with the use of agent-based modelling and simulation
- Corrosion rate measurement for steel sheets of a fuel tank shell being in service
- The influence of external environment on workers on scaffolding illustrated by UTCI
- Allocation of risk factors for geodetic tasks in construction schedules
- Pedestrian fatality risk as a function of tram impact speed
- Technological and organizational problems in the construction of the radiation shielding concrete and suggestions to solve: A case study
- Finite element analysis of train speed effect on dynamic response of steel bridge
- New approach to analysis of railway track dynamics – Rail head vibrations
- Special Issue: Trends in Logistics and Production for the 21st Century - Part I
- Design of production lines and logistic flows in production
- The planning process of transport tasks for autonomous vans
- Modeling of the two shuttle box system within the internal logistics system using simulation software
- Implementation of the logistics train in the intralogistics system: A case study
- Assessment of investment in electric buses: A case study of a public transport company
- Assessment of a robot base production using CAM programming for the FANUC control system
- Proposal for the flow of material and adjustments to the storage system of an external service provider
- The use of numerical analysis of the injection process to select the material for the injection molding
- Economic aspect of combined transport
- Solution of a production process with the application of simulation: A case study
- Speedometer reliability in regard to road traffic sustainability
- Design and construction of a scanning stand for the PU mini-acoustic sensor
- Utilization of intelligent vehicle units for train set dispatching
- Special Issue: ICRTEEC - 2021 - Part I
- LVRT enhancement of DFIG-driven wind system using feed-forward neuro-sliding mode control
- Special Issue: Automation in Finland 2021 - Part I
- Prediction of future paths of mobile objects using path library
- Model predictive control for a multiple injection combustion model
- Model-based on-board post-injection control development for marine diesel engine
- Intelligent temporal analysis of coronavirus statistical data
Articles in the same Issue
- Regular Articles
- Electrochemical studies of the synergistic combination effect of thymus mastichina and illicium verum essential oil extracts on the corrosion inhibition of low carbon steel in dilute acid solution
- Adoption of Business Intelligence to Support Cost Accounting Based Financial Systems — Case Study of XYZ Company
- Techno-Economic Feasibility Analysis of a Hybrid Renewable Energy Supply Options for University Buildings in Saudi Arabia
- Optimized design of a semimetal gasket operating in flange-bolted joints
- Behavior of non-reinforced and reinforced green mortar with fibers
- Field measurement of contact forces on rollers for a large diameter pipe conveyor
- Development of Smartphone-Controlled Hand and Arm Exoskeleton for Persons with Disability
- Investigation of saturation flow rate using video camera at signalized intersections in Jordan
- The features of Ni2MnIn polycrystalline Heusler alloy thin films formation by pulsed laser deposition
- Selection of a workpiece clamping system for computer-aided subtractive manufacturing of geometrically complex medical models
- Development of Solar-Powered Water Pump with 3D Printed Impeller
- Identifying Innovative Reliable Criteria Governing the Selection of Infrastructures Construction Project Delivery Systems
- Kinetics of Carbothermal Reduction Process of Different Size Phosphate Rocks
- Plastic forming processes of transverse non-homogeneous composite metallic sheets
- Accelerated aging of WPCs Based on Polypropylene and Birch plywood Sanding Dust
- Effect of water flow and depth on fatigue crack growth rate of underwater wet welded low carbon steel SS400
- Non-invasive attempts to extinguish flames with the use of high-power acoustic extinguisher
- Filament wound composite fatigue mechanisms investigated with full field DIC strain monitoring
- Structural Timber In Compartment Fires – The Timber Charring and Heat Storage Model
- Technical and economic aspects of starting a selected power unit at low ambient temperatures
- Car braking effectiveness after adaptation for drivers with motor dysfunctions
- Adaptation to driver-assistance systems depending on experience
- A SIMULINK implementation of a vector shift relay with distributed synchronous generator for engineering classes
- Evaluation of measurement uncertainty in a static tensile test
- Errors in documenting the subsoil and their impact on the investment implementation: Case study
- Comparison between two calculation methods for designing a stand-alone PV system according to Mosul city basemap
- Reduction of transport-related air pollution. A case study based on the impact of the COVID-19 pandemic on the level of NOx emissions in the city of Krakow
- Driver intervention performance assessment as a key aspect of L3–L4 automated vehicles deployment
- A new method for solving quadratic fractional programming problem in neutrosophic environment
- Effect of fish scales on fabrication of polyester composite material reinforcements
- Impact of the operation of LNG trucks on the environment
- The effectiveness of the AEB system in the context of the safety of vulnerable road users
- Errors in controlling cars cause tragic accidents involving motorcyclists
- Deformation of designed steel plates: An optimisation of the side hull structure using the finite element approach
- Thermal-strength analysis of a cross-flow heat exchanger and its design improvement
- Effect of thermal collector configuration on the photovoltaic heat transfer performance with 3D CFD modeling
- Experimental identification of the subjective reception of external stimuli during wheelchair driving
- Failure analysis of motorcycle shock breakers
- Experimental analysis of nonlinear characteristics of absorbers with wire rope isolators
- Experimental tests of the antiresonance vibratory mill of a sectional movement trajectory
- Experimental and theoretical investigation of CVT rubber belt vibrations
- Is the cubic parabola really the best railway transition curve?
- Transport properties of the new vibratory conveyor at operations in the resonance zone
- Assessment of resistance to permanent deformations of asphalt mixes of low air void content
- COVID-19 lockdown impact on CERN seismic station ambient noise levels
- Review Articles
- FMEA method in operational reliability of forest harvesters
- Examination of preferences in the field of mobility of the city of Pila in terms of services provided by the Municipal Transport Company in Pila
- Enhancement stability and color fastness of natural dye: A review
- Special Issue: ICE-SEAM 2019 - Part II
- Lane Departure Warning Estimation Using Yaw Acceleration
- Analysis of EMG Signals during Stance and Swing Phases for Controlling Magnetorheological Brake applications
- Sensor Number Optimization Using Neural Network for Ankle Foot Orthosis Equipped with Magnetorheological Brake
- Special Issue: Recent Advances in Civil Engineering - Part II
- Comparison of STM’s reliability system on the example of selected element
- Technical analysis of the renovation works of the wooden palace floors
- Special Issue: TRANSPORT 2020
- Simulation assessment of the half-power bandwidth method in testing shock absorbers
- Predictive analysis of the impact of the time of day on road accidents in Poland
- User’s determination of a proper method for quantifying fuel consumption of a passenger car with compression ignition engine in specific operation conditions
- Analysis and assessment of defectiveness of regulations for the yellow signal at the intersection
- Streamlining possibility of transport-supply logistics when using chosen Operations Research techniques
- Permissible distance – safety system of vehicles in use
- Study of the population in terms of knowledge about the distance between vehicles in motion
- UAVs in rail damage image diagnostics supported by deep-learning networks
- Exhaust emissions of buses LNG and Diesel in RDE tests
- Measurements of urban traffic parameters before and after road reconstruction
- The use of deep recurrent neural networks to predict performance of photovoltaic system for charging electric vehicles
- Analysis of dangers in the operation of city buses at the intersections
- Psychological factors of the transfer of control in an automated vehicle
- Testing and evaluation of cold-start emissions from a gasoline engine in RDE test at two different ambient temperatures
- Age and experience in driving a vehicle and psychomotor skills in the context of automation
- Consumption of gasoline in vehicles equipped with an LPG retrofit system in real driving conditions
- Laboratory studies of the influence of the working position of the passenger vehicle air suspension on the vibration comfort of children transported in the child restraint system
- Route optimization for city cleaning vehicle
- Efficiency of electric vehicle interior heating systems at low ambient temperatures
- Model-based imputation of sound level data at thoroughfare using computational intelligence
- Research on the combustion process in the Fiat 1.3 Multijet engine fueled with rapeseed methyl esters
- Overview of the method and state of hydrogenization of road transport in the world and the resulting development prospects in Poland
- Tribological characteristics of polymer materials used for slide bearings
- Car reliability analysis based on periodic technical tests
- Special Issue: Terotechnology 2019 - Part II
- DOE Application for Analysis of Tribological Properties of the Al2O3/IF-WS2 Surface Layers
- The effect of the impurities spaces on the quality of structural steel working at variable loads
- Prediction of the parameters and the hot open die elongation forging process on an 80 MN hydraulic press
- Special Issue: AEVEC 2020
- Vocational Student's Attitude and Response Towards Experiential Learning in Mechanical Engineering
- Virtual Laboratory to Support a Practical Learning of Micro Power Generation in Indonesian Vocational High Schools
- The impacts of mediating the work environment on the mode choice in work trips
- Utilization of K-nearest neighbor algorithm for classification of white blood cells in AML M4, M5, and M7
- Car braking effectiveness after adaptation for drivers with motor dysfunctions
- Case study: Vocational student’s knowledge and awareness level toward renewable energy in Indonesia
- Contribution of collaborative skill toward construction drawing skill for developing vocational course
- Special Issue: Annual Engineering and Vocational Education Conference - Part II
- Vocational teachers’ perspective toward Technological Pedagogical Vocational Knowledge
- Special Issue: ICIMECE 2020 - Part I
- Profile of system and product certification as quality infrastructure in Indonesia
- Prediction Model of Magnetorheological (MR) Fluid Damper Hysteresis Loop using Extreme Learning Machine Algorithm
- A review on the fused deposition modeling (FDM) 3D printing: Filament processing, materials, and printing parameters
- Facile rheological route method for LiFePO4/C cathode material production
- Mosque design strategy for energy and water saving
- Epoxy resins thermosetting for mechanical engineering
- Estimating the potential of wind energy resources using Weibull parameters: A case study of the coastline region of Dar es Salaam, Tanzania
- Special Issue: CIRMARE 2020
- New trends in visual inspection of buildings and structures: Study for the use of drones
- Special Issue: ISERT 2021
- Alleviate the contending issues in network operating system courses: Psychomotor and troubleshooting skill development with Raspberry Pi
- Special Issue: Actual Trends in Logistics and Industrial Engineering - Part II
- The Physical Internet: A means towards achieving global logistics sustainability
- Special Issue: Modern Scientific Problems in Civil Engineering - Part I
- Construction work cost and duration analysis with the use of agent-based modelling and simulation
- Corrosion rate measurement for steel sheets of a fuel tank shell being in service
- The influence of external environment on workers on scaffolding illustrated by UTCI
- Allocation of risk factors for geodetic tasks in construction schedules
- Pedestrian fatality risk as a function of tram impact speed
- Technological and organizational problems in the construction of the radiation shielding concrete and suggestions to solve: A case study
- Finite element analysis of train speed effect on dynamic response of steel bridge
- New approach to analysis of railway track dynamics – Rail head vibrations
- Special Issue: Trends in Logistics and Production for the 21st Century - Part I
- Design of production lines and logistic flows in production
- The planning process of transport tasks for autonomous vans
- Modeling of the two shuttle box system within the internal logistics system using simulation software
- Implementation of the logistics train in the intralogistics system: A case study
- Assessment of investment in electric buses: A case study of a public transport company
- Assessment of a robot base production using CAM programming for the FANUC control system
- Proposal for the flow of material and adjustments to the storage system of an external service provider
- The use of numerical analysis of the injection process to select the material for the injection molding
- Economic aspect of combined transport
- Solution of a production process with the application of simulation: A case study
- Speedometer reliability in regard to road traffic sustainability
- Design and construction of a scanning stand for the PU mini-acoustic sensor
- Utilization of intelligent vehicle units for train set dispatching
- Special Issue: ICRTEEC - 2021 - Part I
- LVRT enhancement of DFIG-driven wind system using feed-forward neuro-sliding mode control
- Special Issue: Automation in Finland 2021 - Part I
- Prediction of future paths of mobile objects using path library
- Model predictive control for a multiple injection combustion model
- Model-based on-board post-injection control development for marine diesel engine
- Intelligent temporal analysis of coronavirus statistical data