Resectoscope with an easy to use twist mechanism for improved handling
-
Holger Fritzsche
 ,
Martin Schostak
,
Martin Schostak

Abstract
One of the oldest methods used in minimally invasive surgeries is the transurethral resection. This is an operation technique in which diseased tissue from the bladder or the prostate is removed using a resectoscope through the urethra [Schostak M, Blana A, Hrsg. Alternative operative Therapien in der Uroonkologie. Berlin, Heidelberg, Springer Berlin Heidelberg; 2016]. A resectoscope has a channel for the view of the surgeon, a liquid supply, a working channel and a hand piece which could rotate up to 360 degrees. A RF- electrode on the tip of the resectoscope is used to cut out pathological growths. For diseased tissue which is located in the bladder on the ventral side, a rotation of the resectoscope up to 180 degrees is necessary. This means on the one side tiring of the hands, wrist pain and a change of the position of the operating surgeon. On the other side a reorganization of the connected tubes and cables is necessary. To avoid these problems and integrate additional features a standard resectoscope was adapted with an easy to use twist mechanism. After discussion with experienced urological surgeons a complete new design of the resectoscope with a twist mechanism in combination with a gyro sensor and a reference display was realized.
1 Introduction
The resectoscope is a combined cystoscope and an electrosurgical instrument that allows the resection of prostate tissue, or diseased tissue of the bladder under direct vision by using an electric resection loop. Due to prostate bleeding, the resection is only possible by continuous irrigation [2].
There are a significant number of transurethral interventions. According to the Robert Koch Institute, in the year 2010, about 21,550 men and 7240 women were diagnosed with bladder cancer in Germany [3]. Bladder cancer is the 5th most common category of cancer for men in Germany. The average age of men diagnosed is approximately 74 years, and for woman 72 years. In addition, approx. 60,000 TUR-P (transurethral resection of the prostate) are performed for benign prostatic hyperplasia [4]. Relevant developments in the area of endoscopic interventions have a market with a nationwide commercial network for sale and trade.
2 Methods
2.1 Identification of clinical need
Based on observed clinical TUR-B procedures (transurethral resection of the bladder) an unmet clinical need in handling optimisation of the resectoscope was identified [5] (Figure 1).

Observation of a TUR-B procedure (KURO, University Hospital Magdeburg).
The surgeon has to re-grab and twists the hand piece to about 180 degrees to reach every section of the bladder. Twisting of the resectoscope brings the surgeon in uncomfortable posture and aggravates the execution of the procedure. Additionally the line of sight on the endoscopic monitor is limited. Due to the movement of the surgeon, the monitor is sometimes hard to see during the procedure. Figure 2 shows a standard resectoscope that has to be rotated.
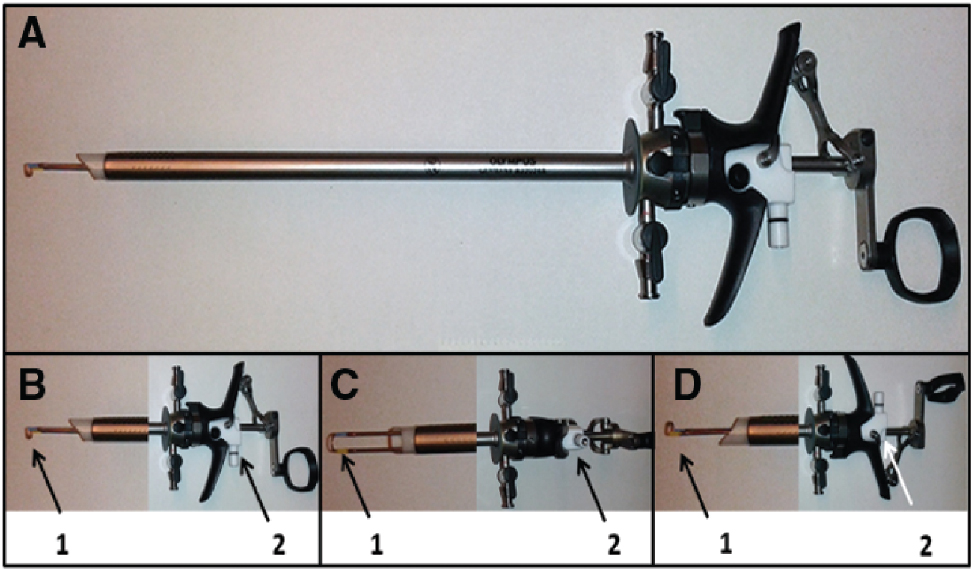
Standard resectoscope Olympus Surgemaster (A); in different rotation angles, (B) electrode loop downward, (C) electrode loop sideward, (D) electrode loop upward; 1: electrode loop, 2: connector for power supply.
2.2 Definition of the essential functionalities
Figure 3 shows the standard parts of a resectoscope (Surgemaster, Olympus Winter & Ibe GmbH, Hamburg, Germany).
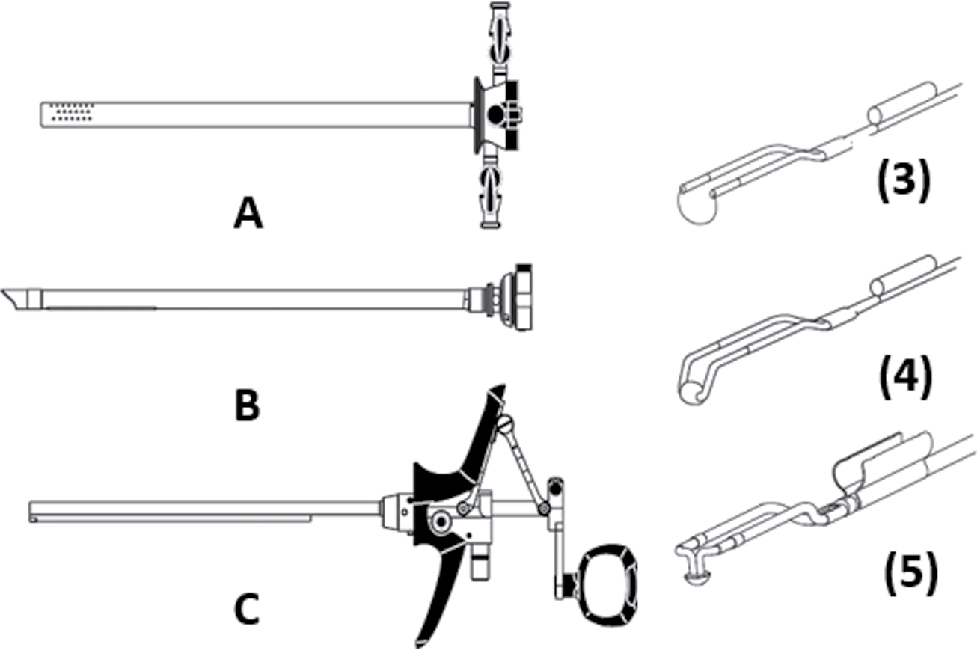
Olympus resectoscope on the left with outer shaft- A22026A (A), inner shaft- A22040 (B) and working element – WA22066A (C); on the right the different electrodes for HF-surgery: resection loop (3), roller (4) and button (5).
The outer shaft enables irrigation of the surgery side. The inner shaft covers the electrode on the working element. The working element carries the hand piece with agitation mechanism. A central pipe allows the access of an endoscope for imaging. Different shapes of resection loops can be combined with the resectoscope.
Beside the standard features like resection, flushing, and the combination with optical imaging, the following additional functionalities were recognized according to the user feedback:
Twist mechanism for improved handling,
Sensing of the loop position for mapping and documentation,
Visualization of the camera image in a user friendly position to overcome line of sight issues.
2.3 Conceptual design
To avoid twisting of the hand and uncomfortable posture an intermediate piece was designed as an adapter interface. This adapter allows a corresponding translation of the movement between 1 and 360 degrees. The challenge in this design is a safe realization of the electrical interface between the moving parts. The adapter interface obviously should be integrated into the standard device. Therefore the connecting dimensions have to be considered.
Mapping the resection areas in the bladder during the procedure can be an advantageous feature for quality insurance. Thus a gyro sensor should be integrated into the new adapter interface. The sensor measures the rotation and the translation of the resection loop. Combined with an external tracking, future mapping of the procedure and staging could become feasible.
To overcome the identified line of sight issue, an additional small monitor is planned. This monitor can be placed in a comfortable position e.g. on the wrist of the surgeon or directly on the endoscope.
2.4 Set up of a first prototype
A standard resectoscope (OES Pro-2, Olympus Winter & Ibe GmbH, Hamburg, Germany) was modified to integrate the described twist mechanism as the basic feature. The parts of the hand piece were manufactured by rapid prototyping. Stainless steel pipes in the dimensions of the original resectoscope are used as carrier for the twist mechanism. Thus the compatibility to established imaging and therapy devices is ensured.
Figure 4 shows the assembly of this first prototype. The acting hand is holding the resectoscope. The translational movement is executed by a grasping movement of the acting hand. For rotation of the loop the other hand has to operate the rotation wheel.

Assembly of the first prototype with twist mechanism; rotational wheel- (A); cable reel- (B); lock mechanism- (C); connector for cable- (D).
2.5 Evaluation with clinical user
The first prototype of the twist mechanism was demonstrated to an experienced clinical user and also tested by himself. The additional rotation was confirmed as useful feature to simplify the intervention. But the operation of the twisting mechanism with the second hand is difficult during the actual therapy. Another important feedback was a critic on the standard hand grip of the resectoscope. The operation by the thumb is tiring for the surgical hand with falling asleep fingers. In additional motion tests for one-hand-handling a complete new concept for the design of a resectoscope based on the design of single use laparoscopic graspers was proposed.
2.6 Redesign of the prototype
A pistol like hand piece with a lever for operating the translational movement of the resection loop was designed. The shape was oriented on established interventional devices. The lever can be moved by two or three fingers of the acting hand. The rotation wheel was integrated directly in the housing of the grip. Thus, an easy operation with the thumb or the forefinger of the same hand is easily possible (Figure 5). The grip provides space for integration of a gyro sensor inside the housing on the shaft of the rotation wheel therefore the rotational movement, back and forth movement could be detected. Electrical conduction of the sensor was carried out directly beside the cable of the connection of the resection loop. For attachment of a miniaturized monitor as a reference display for the sensor data, a plain area on the back of the grip is provided.

Revision of the Prototype with twist mechanism; (A) pistol grip, (B) lever for translational movement, (C) rotation wheel, (D) resection loop.
2.7 Test of the prototype
The manufactured prototype was tested on a porcine sample. An endoscope connected to an endoscopic video processor and light source (Exera III, Olympus) was inserted through the imaging pipe for visualization. The resectoscope was connected to a HF generator (ESG 400, Olympus). The sample was placed on a reusable silicone electrode (Erbe Medizintechnik). The mode coagulation and cut were tested (Figure 6). The twist mechanism could be operated with the thumb for left rotation and the forefinger for right rotation during resection procedure. The translational movement of the electrode is manipulated by the hand lever of the pistol grip.

Test of the prototype on a porcine sample combined with endoscopic imaging.
3 Results
A prototype of the twistable resectoscope was designed and manufactured. The electrical interface was realized by an encapsulated flexible connector. The functionality and handling of the resectoscope was tested in clinical environment on phantoms. To receive feedback from real users, the prototype was demonstrated and discussed with experienced surgeons. For mapping and position detection a gyro sensor was implemented. An external miniature monitor can be attached on the back of the resectoscope easily (Figure 7).

(A) Integration of gyro sensor into the housing; (B) reference display attached to the back end of resectoscope.
4 Discussion
Observation of clinical procedures is an excellent method for generating new ideas for improvement of interventions and devices. The observed clinical needs were addressed by a user integrated design approach. By this, conceptual flaws were detected early in the first design stage. In the second design a user friendly resectoscope with a new twisting mechanism was drafted and manufactured. The proposed and well perceived twist mechanism can now be operated with only one hand. The pistol grip avoids tiring of the hands. Beside the possibility of rotation of the resection loop, a gyro sensor was integrated to measure angulation and movement. In a future development step, that was simulated, it is planned to firmly integrate a small monitor to overcome line of sight issues.
5 Conclusion
The integrated adaption of the resectoscope with a twist mechanism allows a simplified handling of the instrument in combination with the attached cables und tubes. The principle workflow of the procedure has not been changed. The additional small monitor that is in the line of the therapy could further improve the workflow and procedure comfort. With additional gyro sensors and instrument tracking a mapping of the bladder could be obtained for future references and as quality assurance measure.
Author’s Statement
Research funding: Supported by BMBF Germany INKA (03IPT7100X). Conflict of interest: Authors state no conflict of interest. Material and Methods: Informed consent: Informed consent has been obtained from all individuals included in this study. Ethical approval: The research related to human use complies with all the relevant national regulations, institutional policies and was performed in accordance with the tenets of the Helsinki Declaration, and has been approved by the authors’ institutional review board or equivalent committee.
References
[1] Schostak M, Blana A, Hrsg. Alternative operative Therapien in der Uroonkologie. Berlin, Heidelberg: Springer Berlin Heidelberg; 2016.10.1007/978-3-662-44420-7Search in Google Scholar
[2] Manski D. Urologielehrbuch.de Ausgabe 2015., Ausgabe 2015. Dr. Dirk Manski, 2014.Search in Google Scholar
[3] Kaatsch P, Spix C. ”Krebs in Deutschland 2009/2010.“ Robert Koch-Institut Berlin; 2013.Search in Google Scholar
[4] Hautmann R. Urologie. Springer-Verlag; 2010.10.1007/978-3-642-01159-7Search in Google Scholar
[5] Boese A, Grote K-H. “Workflow Analysis as Tool for Development of Medical Devices, a white Paper”, in Proceedings of The World Congress on Engineering 2010, Vol III, pp. 2149–2152, London, UK, 2010.Search in Google Scholar
©2016 Axel Boese et al., licensee De Gruyter.
This work is licensed under the Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 License.
Articles in the same Issue
- Synthesis and characterization of PIL/pNIPAAm hybrid hydrogels
- Novel blood protein based scaffolds for cardiovascular tissue engineering
- Cell adhesion and viability of human endothelial cells on electrospun polymer scaffolds
- Effects of heat treatment and welding process on superelastic behaviour and microstructure of micro electron beam welded NiTi
- Long-term stable modifications of silicone elastomer for improved hemocompatibility
- The effect of thermal treatment on the mechanical properties of PLLA tubular specimens
- Biocompatible wear-resistant thick ceramic coating
- Protection of active implant electronics with organosilicon open air plasma coating for plastic overmolding
- Examination of dielectric strength of thin Parylene C films under various conditions
- Open air plasma deposited antimicrobial SiOx/TiOx composite films for biomedical applications
- Systemic analysis about residual chloroform in PLLA films
- A macrophage model of osseointegration
- Towards in silico prognosis using big data
- Technical concept and evaluation of a novel shoulder simulator with adaptive muscle force generation and free motion
- Usability evaluation of a locomotor therapy device considering different strategies
- Hypoxia-on-a-chip
- Integration of a semi-automatic in-vitro RFA procedure into an experimental setup
- Fabrication of MEMS-based 3D-μECoG-MEAs
- High speed digital interfacing for a neural data acquisition system
- Bionic forceps for the handling of sensitive tissue
- Experimental studies on 3D printing of barium titanate ceramics for medical applications
- Patient specific root-analogue dental implants – additive manufacturing and finite element analysis
- 3D printing – a key technology for tailored biomedical cell culture lab ware
- 3D printing of hydrogels in a temperature controlled environment with high spatial resolution
- Biocompatibility of photopolymers for additive manufacturing
- Biochemical piezoresistive sensors based on pH- and glucose-sensitive hydrogels for medical applications
- Novel wireless measurement system of pressure dedicated to in vivo studies
- Portable auricular device for real-time swallow and chew detection
- Detection of miRNA using a surface plasmon resonance biosensor and antibody amplification
- Simulation and evaluation of stimulation scenarios for targeted vestibular nerve excitation
- Deep brain stimulation: increasing efficiency by alternative waveforms
- Prediction of immediately occurring microsleep events from brain electric signals
- Determining cardiac vagal threshold from short term heart rate complexity
- Classification of cardiac excitation patterns during atrial fibrillation
- An algorithm to automatically determine the cycle length coverage to identify rotational activity during atrial fibrillation – a simulation study
- Deriving respiration from high resolution 12-channel-ECG during cycling exercise
- Reducing of gradient induced artifacts on the ECG signal during MRI examinations using Wilcoxon filter
- Automatic detection and mapping of double potentials in intracardiac electrograms
- Modeling the pelvic region for non-invasive pelvic intraoperative neuromonitoring
- Postprocessing algorithm for automated analysis of pelvic intraoperative neuromonitoring signals
- Best practice: surgeon driven application in pelvic operations
- Vasomotor assessment by camera-based photoplethysmography
- Classification of morphologic changes in photoplethysmographic waveforms
- Novel computation of pulse transit time from multi-channel PPG signals by wavelet transform
- Efficient design of FIR filter based low-pass differentiators for biomedical signal processing
- Nonlinear causal influences assessed by mutual compression entropy
- Comparative study of methods for solving the correspondence problem in EMD applications
- fNIRS for future use in auditory diagnostics
- Semi-automated detection of fractional shortening in zebrafish embryo heart videos
- Blood pressure measurement on the cheek
- Derivation of the respiratory rate from directly and indirectly measured respiratory signals using autocorrelation
- Left cardiac atrioventricular delay and inter-ventricular delay in cardiac resynchronization therapy responder and non-responder
- An automatic systolic peak detector of blood pressure waveforms using 4th order cumulants
- Real-time QRS detection using integrated variance for ECG gated cardiac MRI
- Preprocessing of unipolar signals acquired by a novel intracardiac mapping system
- In-vitro experiments to characterize ventricular electromechanics
- Continuous non-invasive monitoring of blood pressure in the operating room: a cuffless optical technology at the fingertip
- Application of microwave sensor technology in cardiovascular disease for plaque detection
- Artificial blood circulatory and special Ultrasound Doppler probes for detecting and sizing gaseous embolism
- Detection of microsleep events in a car driving simulation study using electrocardiographic features
- A method to determine the kink resistance of stents and stent delivery systems according to international standards
- Comparison of stented bifurcation and straight vessel 3D-simulation with a prior simulated velocity profile inlet
- Transient Euler-Lagrange/DEM simulation of stent thrombosis
- Automated control of the laser welding process of heart valve scaffolds
- Automation of a test bench for accessing the bendability of electrospun vascular grafts
- Influence of storage conditions on the release of growth factors in platelet-rich blood derivatives
- Cryopreservation of cells using defined serum-free cryoprotective agents
- New bioreactor vessel for tissue engineering of human nasal septal chondrocytes
- Determination of the membrane hydraulic permeability of MSCs
- Climate retainment in carbon dioxide incubators
- Multiple factors influencing OR ventilation system effectiveness
- Evaluation of an app-based stress protocol
- Medication process in Styrian hospitals
- Control tower to surgical theater
- Development of a skull phantom for the assessment of implant X-ray visibility
- Surgical navigation with QR codes
- Investigation of the pressure gradient of embolic protection devices
- Computer assistance in femoral derotation osteotomy: a bottom-up approach
- Automatic depth scanning system for 3D infrared thermography
- A service for monitoring the quality of intraoperative cone beam CT images
- Resectoscope with an easy to use twist mechanism for improved handling
- In vitro simulation of distribution processes following intramuscular injection
- Adjusting inkjet printhead parameters to deposit drugs into micro-sized reservoirs
- A flexible standalone system with integrated sensor feedback for multi-pad electrode FES of the hand
- Smart control for functional electrical stimulation with optimal pulse intensity
- Tactile display on the remaining hand for unilateral hand amputees
- Effects of sustained electrical stimulation on spasticity assessed by the pendulum test
- An improved tracking framework for ultrasound probe localization in image-guided radiosurgery
- Improvement of a subviral particle tracker by the use of a LAP-Kalman-algorithm
- Learning discriminative classification models for grading anal intraepithelial neoplasia
- Regularization of EIT reconstruction based on multi-scales wavelet transforms
- Assessing MRI susceptibility artefact through an indicator of image distortion
- EyeGuidance – a computer controlled system to guide eye movements
- A framework for feedback-based segmentation of 3D image stacks
- Doppler optical coherence tomography as a promising tool for detecting fluid in the human middle ear
- 3D Local in vivo Environment (LivE) imaging for single cell protein analysis of bone tissue
- Inside-Out access strategy using new trans-vascular catheter approach
- US/MRI fusion with new optical tracking and marker approach for interventional procedures inside the MRI suite
- Impact of different registration methods in MEG source analysis
- 3D segmentation of thyroid ultrasound images using active contours
- Designing a compact MRI motion phantom
- Cerebral cortex classification by conditional random fields applied to intraoperative thermal imaging
- Classification of indirect immunofluorescence images using thresholded local binary count features
- Analysis of muscle fatigue conditions using time-frequency images and GLCM features
- Numerical evaluation of image parameters of ETR-1
- Fabrication of a compliant phantom of the human aortic arch for use in Particle Image Velocimetry (PIV) experimentation
- Effect of the number of electrodes on the reconstructed lung shape in electrical impedance tomography
- Hardware dependencies of GPU-accelerated beamformer performances for microwave breast cancer detection
- Computer assisted assessment of progressing osteoradionecrosis of the jaw for clinical diagnosis and treatment
- Evaluation of reconstruction parameters of electrical impedance tomography on aorta detection during saline bolus injection
- Evaluation of open-source software for the lung segmentation
- Automatic determination of lung features of CF patients in CT scans
- Image analysis of self-organized multicellular patterns
- Effect of key parameters on synthesis of superparamagnetic nanoparticles (SPIONs)
- Radiopacity assessment of neurovascular implants
- Development of a desiccant based dielectric for monitoring humidity conditions in miniaturized hermetic implantable packages
- Development of an artifact-free aneurysm clip
- Enhancing the regeneration of bone defects by alkalizing the peri-implant zone – an in vitro approach
- Rapid prototyping of replica knee implants for in vitro testing
- Protecting ultra- and hyperhydrophilic implant surfaces in dry state from loss of wettability
- Advanced wettability analysis of implant surfaces
- Patient-specific hip prostheses designed by surgeons
- Plasma treatment on novel carbon fiber reinforced PEEK cages to enhance bioactivity
- Wear of a total intervertebral disc prosthesis
- Digital health and digital biomarkers – enabling value chains on health data
- Usability in the lifecycle of medical software development
- Influence of different test gases in a non-destructive 100% quality control system for medical devices
- Device development guided by user satisfaction survey on auricular vagus nerve stimulation
- Empirical assessment of the time course of innovation in biomedical engineering: first results of a comparative approach
- Effect of left atrial hypertrophy on P-wave morphology in a computational model
- Simulation of intracardiac electrograms around acute ablation lesions
- Parametrization of activation based cardiac electrophysiology models using bidomain model simulations
- Assessment of nasal resistance using computational fluid dynamics
- Resistance in a non-linear autoregressive model of pulmonary mechanics
- Inspiratory and expiratory elastance in a non-linear autoregressive model of pulmonary mechanics
- Determination of regional lung function in cystic fibrosis using electrical impedance tomography
- Development of parietal bone surrogates for parietal graft lift training
- Numerical simulation of mechanically stimulated bone remodelling
- Conversion of engineering stresses to Cauchy stresses in tensile and compression tests of thermoplastic polymers
- Numerical examinations of simplified spondylodesis models concerning energy absorption in magnetic resonance imaging
- Principle study on the signal connection at transabdominal fetal pulse oximetry
- Influence of Siluron® insertion on model drug distribution in the simulated vitreous body
- Evaluating different approaches to identify a three parameter gas exchange model
- Effects of fibrosis on the extracellular potential based on 3D reconstructions from histological sections of heart tissue
- From imaging to hemodynamics – how reconstruction kernels influence the blood flow predictions in intracranial aneurysms
- Flow optimised design of a novel point-of-care diagnostic device for the detection of disease specific biomarkers
- Improved FPGA controlled artificial vascular system for plethysmographic measurements
- Minimally spaced electrode positions for multi-functional chest sensors: ECG and respiratory signal estimation
- Automated detection of alveolar arches for nasoalveolar molding in cleft lip and palate treatment
- Control scheme selection in human-machine- interfaces by analysis of activity signals
- Event-based sampling for reducing communication load in realtime human motion analysis by wireless inertial sensor networks
- Automatic pairing of inertial sensors to lower limb segments – a plug-and-play approach
- Contactless respiratory monitoring system for magnetic resonance imaging applications using a laser range sensor
- Interactive monitoring system for visual respiratory biofeedback
- Development of a low-cost senor based aid for visually impaired people
- Patient assistive system for the shoulder joint
- A passive beating heart setup for interventional cardiology training
Articles in the same Issue
- Synthesis and characterization of PIL/pNIPAAm hybrid hydrogels
- Novel blood protein based scaffolds for cardiovascular tissue engineering
- Cell adhesion and viability of human endothelial cells on electrospun polymer scaffolds
- Effects of heat treatment and welding process on superelastic behaviour and microstructure of micro electron beam welded NiTi
- Long-term stable modifications of silicone elastomer for improved hemocompatibility
- The effect of thermal treatment on the mechanical properties of PLLA tubular specimens
- Biocompatible wear-resistant thick ceramic coating
- Protection of active implant electronics with organosilicon open air plasma coating for plastic overmolding
- Examination of dielectric strength of thin Parylene C films under various conditions
- Open air plasma deposited antimicrobial SiOx/TiOx composite films for biomedical applications
- Systemic analysis about residual chloroform in PLLA films
- A macrophage model of osseointegration
- Towards in silico prognosis using big data
- Technical concept and evaluation of a novel shoulder simulator with adaptive muscle force generation and free motion
- Usability evaluation of a locomotor therapy device considering different strategies
- Hypoxia-on-a-chip
- Integration of a semi-automatic in-vitro RFA procedure into an experimental setup
- Fabrication of MEMS-based 3D-μECoG-MEAs
- High speed digital interfacing for a neural data acquisition system
- Bionic forceps for the handling of sensitive tissue
- Experimental studies on 3D printing of barium titanate ceramics for medical applications
- Patient specific root-analogue dental implants – additive manufacturing and finite element analysis
- 3D printing – a key technology for tailored biomedical cell culture lab ware
- 3D printing of hydrogels in a temperature controlled environment with high spatial resolution
- Biocompatibility of photopolymers for additive manufacturing
- Biochemical piezoresistive sensors based on pH- and glucose-sensitive hydrogels for medical applications
- Novel wireless measurement system of pressure dedicated to in vivo studies
- Portable auricular device for real-time swallow and chew detection
- Detection of miRNA using a surface plasmon resonance biosensor and antibody amplification
- Simulation and evaluation of stimulation scenarios for targeted vestibular nerve excitation
- Deep brain stimulation: increasing efficiency by alternative waveforms
- Prediction of immediately occurring microsleep events from brain electric signals
- Determining cardiac vagal threshold from short term heart rate complexity
- Classification of cardiac excitation patterns during atrial fibrillation
- An algorithm to automatically determine the cycle length coverage to identify rotational activity during atrial fibrillation – a simulation study
- Deriving respiration from high resolution 12-channel-ECG during cycling exercise
- Reducing of gradient induced artifacts on the ECG signal during MRI examinations using Wilcoxon filter
- Automatic detection and mapping of double potentials in intracardiac electrograms
- Modeling the pelvic region for non-invasive pelvic intraoperative neuromonitoring
- Postprocessing algorithm for automated analysis of pelvic intraoperative neuromonitoring signals
- Best practice: surgeon driven application in pelvic operations
- Vasomotor assessment by camera-based photoplethysmography
- Classification of morphologic changes in photoplethysmographic waveforms
- Novel computation of pulse transit time from multi-channel PPG signals by wavelet transform
- Efficient design of FIR filter based low-pass differentiators for biomedical signal processing
- Nonlinear causal influences assessed by mutual compression entropy
- Comparative study of methods for solving the correspondence problem in EMD applications
- fNIRS for future use in auditory diagnostics
- Semi-automated detection of fractional shortening in zebrafish embryo heart videos
- Blood pressure measurement on the cheek
- Derivation of the respiratory rate from directly and indirectly measured respiratory signals using autocorrelation
- Left cardiac atrioventricular delay and inter-ventricular delay in cardiac resynchronization therapy responder and non-responder
- An automatic systolic peak detector of blood pressure waveforms using 4th order cumulants
- Real-time QRS detection using integrated variance for ECG gated cardiac MRI
- Preprocessing of unipolar signals acquired by a novel intracardiac mapping system
- In-vitro experiments to characterize ventricular electromechanics
- Continuous non-invasive monitoring of blood pressure in the operating room: a cuffless optical technology at the fingertip
- Application of microwave sensor technology in cardiovascular disease for plaque detection
- Artificial blood circulatory and special Ultrasound Doppler probes for detecting and sizing gaseous embolism
- Detection of microsleep events in a car driving simulation study using electrocardiographic features
- A method to determine the kink resistance of stents and stent delivery systems according to international standards
- Comparison of stented bifurcation and straight vessel 3D-simulation with a prior simulated velocity profile inlet
- Transient Euler-Lagrange/DEM simulation of stent thrombosis
- Automated control of the laser welding process of heart valve scaffolds
- Automation of a test bench for accessing the bendability of electrospun vascular grafts
- Influence of storage conditions on the release of growth factors in platelet-rich blood derivatives
- Cryopreservation of cells using defined serum-free cryoprotective agents
- New bioreactor vessel for tissue engineering of human nasal septal chondrocytes
- Determination of the membrane hydraulic permeability of MSCs
- Climate retainment in carbon dioxide incubators
- Multiple factors influencing OR ventilation system effectiveness
- Evaluation of an app-based stress protocol
- Medication process in Styrian hospitals
- Control tower to surgical theater
- Development of a skull phantom for the assessment of implant X-ray visibility
- Surgical navigation with QR codes
- Investigation of the pressure gradient of embolic protection devices
- Computer assistance in femoral derotation osteotomy: a bottom-up approach
- Automatic depth scanning system for 3D infrared thermography
- A service for monitoring the quality of intraoperative cone beam CT images
- Resectoscope with an easy to use twist mechanism for improved handling
- In vitro simulation of distribution processes following intramuscular injection
- Adjusting inkjet printhead parameters to deposit drugs into micro-sized reservoirs
- A flexible standalone system with integrated sensor feedback for multi-pad electrode FES of the hand
- Smart control for functional electrical stimulation with optimal pulse intensity
- Tactile display on the remaining hand for unilateral hand amputees
- Effects of sustained electrical stimulation on spasticity assessed by the pendulum test
- An improved tracking framework for ultrasound probe localization in image-guided radiosurgery
- Improvement of a subviral particle tracker by the use of a LAP-Kalman-algorithm
- Learning discriminative classification models for grading anal intraepithelial neoplasia
- Regularization of EIT reconstruction based on multi-scales wavelet transforms
- Assessing MRI susceptibility artefact through an indicator of image distortion
- EyeGuidance – a computer controlled system to guide eye movements
- A framework for feedback-based segmentation of 3D image stacks
- Doppler optical coherence tomography as a promising tool for detecting fluid in the human middle ear
- 3D Local in vivo Environment (LivE) imaging for single cell protein analysis of bone tissue
- Inside-Out access strategy using new trans-vascular catheter approach
- US/MRI fusion with new optical tracking and marker approach for interventional procedures inside the MRI suite
- Impact of different registration methods in MEG source analysis
- 3D segmentation of thyroid ultrasound images using active contours
- Designing a compact MRI motion phantom
- Cerebral cortex classification by conditional random fields applied to intraoperative thermal imaging
- Classification of indirect immunofluorescence images using thresholded local binary count features
- Analysis of muscle fatigue conditions using time-frequency images and GLCM features
- Numerical evaluation of image parameters of ETR-1
- Fabrication of a compliant phantom of the human aortic arch for use in Particle Image Velocimetry (PIV) experimentation
- Effect of the number of electrodes on the reconstructed lung shape in electrical impedance tomography
- Hardware dependencies of GPU-accelerated beamformer performances for microwave breast cancer detection
- Computer assisted assessment of progressing osteoradionecrosis of the jaw for clinical diagnosis and treatment
- Evaluation of reconstruction parameters of electrical impedance tomography on aorta detection during saline bolus injection
- Evaluation of open-source software for the lung segmentation
- Automatic determination of lung features of CF patients in CT scans
- Image analysis of self-organized multicellular patterns
- Effect of key parameters on synthesis of superparamagnetic nanoparticles (SPIONs)
- Radiopacity assessment of neurovascular implants
- Development of a desiccant based dielectric for monitoring humidity conditions in miniaturized hermetic implantable packages
- Development of an artifact-free aneurysm clip
- Enhancing the regeneration of bone defects by alkalizing the peri-implant zone – an in vitro approach
- Rapid prototyping of replica knee implants for in vitro testing
- Protecting ultra- and hyperhydrophilic implant surfaces in dry state from loss of wettability
- Advanced wettability analysis of implant surfaces
- Patient-specific hip prostheses designed by surgeons
- Plasma treatment on novel carbon fiber reinforced PEEK cages to enhance bioactivity
- Wear of a total intervertebral disc prosthesis
- Digital health and digital biomarkers – enabling value chains on health data
- Usability in the lifecycle of medical software development
- Influence of different test gases in a non-destructive 100% quality control system for medical devices
- Device development guided by user satisfaction survey on auricular vagus nerve stimulation
- Empirical assessment of the time course of innovation in biomedical engineering: first results of a comparative approach
- Effect of left atrial hypertrophy on P-wave morphology in a computational model
- Simulation of intracardiac electrograms around acute ablation lesions
- Parametrization of activation based cardiac electrophysiology models using bidomain model simulations
- Assessment of nasal resistance using computational fluid dynamics
- Resistance in a non-linear autoregressive model of pulmonary mechanics
- Inspiratory and expiratory elastance in a non-linear autoregressive model of pulmonary mechanics
- Determination of regional lung function in cystic fibrosis using electrical impedance tomography
- Development of parietal bone surrogates for parietal graft lift training
- Numerical simulation of mechanically stimulated bone remodelling
- Conversion of engineering stresses to Cauchy stresses in tensile and compression tests of thermoplastic polymers
- Numerical examinations of simplified spondylodesis models concerning energy absorption in magnetic resonance imaging
- Principle study on the signal connection at transabdominal fetal pulse oximetry
- Influence of Siluron® insertion on model drug distribution in the simulated vitreous body
- Evaluating different approaches to identify a three parameter gas exchange model
- Effects of fibrosis on the extracellular potential based on 3D reconstructions from histological sections of heart tissue
- From imaging to hemodynamics – how reconstruction kernels influence the blood flow predictions in intracranial aneurysms
- Flow optimised design of a novel point-of-care diagnostic device for the detection of disease specific biomarkers
- Improved FPGA controlled artificial vascular system for plethysmographic measurements
- Minimally spaced electrode positions for multi-functional chest sensors: ECG and respiratory signal estimation
- Automated detection of alveolar arches for nasoalveolar molding in cleft lip and palate treatment
- Control scheme selection in human-machine- interfaces by analysis of activity signals
- Event-based sampling for reducing communication load in realtime human motion analysis by wireless inertial sensor networks
- Automatic pairing of inertial sensors to lower limb segments – a plug-and-play approach
- Contactless respiratory monitoring system for magnetic resonance imaging applications using a laser range sensor
- Interactive monitoring system for visual respiratory biofeedback
- Development of a low-cost senor based aid for visually impaired people
- Patient assistive system for the shoulder joint
- A passive beating heart setup for interventional cardiology training