A review of safety test methods for new car assessment program in Southeast Asian countries
-
Siti Nur Atiqah Halimi
 ,
Mohd Hatta Mohammed Ariff
,
Mohd Hatta Mohammed Ariff

Abstract
Vehicles with advanced active safety technology can decrease the significant traffic accidents that can lead to death. This active safety frontier falls under primary safety in the European New Car Assessment Program (Euro NCAP) 2025 Roadmap, which has become one of the overall safety rating initiatives toward safer vehicles. Some frontier active safety technologies will be assessed, including autonomous emergency steering (AES) and autonomous emergency braking (AEB). However, the New Car Assessment Program in Southeast Asian Countries (ASEAN NCAP) only focuses on AEB technologies. Hence, this work discusses the existing papers on AES assessment, AES demand, AES control, AES system with Artificial intelligence, and AES testing methodology. Three articles from the industry discussing the AES function in passenger automobiles were found as a result of an article search using the Google search platform. Other terminologies like emergency steering control and emergency steering assist are used instead of AES. However, the principle remains the same. The three categories have been recognized from all of the document results: road adhesion condition, driver condition identification, and rear-end collision. However, only the rear-end collision situations are further investigated in this work to recognize the currently available approach used by previous studies. According to the review findings, just a few AEB intervention systems are now accessible, while AES technology is still in its early phases. That might explain the lack of exact evaluations and effective remedies. As a result, this research aims to offer evidence supporting the proposed methodology for assessing and evaluating AES in the ASEAN NCAP rating scheme. Besides that, this study can also help industries such as automakers and automotive vendors leverage the guidelines to fit the AES in their future models.
1 Introduction
Today’s global automakers are focusing critically on developing trends in vehicle technology such as Artificial intelligence (AI), cooperative intelligent transportation systems (C-ITS), internet of things (IoT), and autonomous driving in cars, as well as improving vehicle safety, and making vehicles more environmentally friendly and more intelligent. Nowadays, automobile manufacturers should prioritize the development of safer automobiles. The safety automobile has two categories: passive and active safety [1]. Advanced active safety features in vehicles can reduce fatal traffic collisions, but these features are only available to residents of high-income regions [2]. Passive safety, which aids car occupants in surviving a collision, was the priority two decades ago [3].
However, the focus of safety innovation has shifted from passive safety, which reduces the impact of an accident or the severity of the injury, such as side-impact protection and airbags, to active safety, which prevents collisions before they occur, such as autonomous emergency steering (AES) and autonomous emergency braking (AEB). In other words, passive safety technology focuses entirely on minimizing the effects of an accident both before and after impact. Meanwhile, active safety technologies can prevent or lessen an accident before it happens.
As highlighted in the European New Car Assessment Program (Euro NCAP) 2025 roadmap [4], this active safety is a leading safety priority that has evolved into a global safety rating project for safer automobiles or vehicles. Some frontier active safety technologies need to be assessed, including AES and AEB. Euro NCAP conducts these tests to assess system operation and performance while driving usually and in common accident conditions [5]. These technologies are available in most vehicle fitments starting from 2022. However, AES is a new technology, and revisions to regulations were planned in 2022 to utilize its potential fully.
This initiative is fitted into the recently launched National Automotive Policy (NAP 2020). The NAP 2020 is a program that promotes investment, technological growth, and sustainability in general. The NAP 2020 promotes new growth sectors by incorporating future development technologies such as Next-Generation Vehicle (NxGV), Mobility as a Service (MaaS), and Industrial Revolution 4.0 (IR4.0) [6]. The NxGV standards have been created in 2021 in order for the market to be fully developed by 2025. In the NxGV direction, there are three leading focused technologies: connected vehicles, advanced driving capabilities, and energy-efficient powertrains. Thus, the vehicle’s active safety technologies development is integral to the advanced driving capabilities. It is worth mentioning that a rise in directions towards IR4.0, MaaS, and NxGV is currently applied by automotive leaders such as the United States, the United Kingdom, Germany, China, and Japan.
On the other hand, in Southeast Asian countries, especially Malaysia, the ASEAN NCAP Roadmap 2021–2025 includes this program in its “Safety Assist” technology growth endeavor [7]. The ASEAN NCAP, for example, focuses solely on AEB technologies, which are functions that warn drivers of impending collisions and assist them in using the vehicle’s full capability. In contrast to AEB, the AES technology will automatically steer to prevent accidents when a predicted collision is identified. This active safety system gives an advantage in evasive steering support. Later, the combination of AEB and AES will enhance intelligent mobility applications with a minimum of Level 4 of the Society of Automotive Engineers (SAE), driving high automation [8]. The SAE recognizes six degrees of driving automation, from level 0 being entirely manual to level 5 being autonomous, as illustrated in Figure 1. The US Department of Transportation has approved these standards.
![Figure 1
SAE levels of driving automation [8].](/document/doi/10.1515/eng-2022-0501/asset/graphic/j_eng-2022-0501_fig_001.jpg)
SAE levels of driving automation [8].
Additionally, the AES system may function as a component of an advanced driver assistance system (ADAS) for upcoming driverless or automated cars. Many researchers have reported progress on autonomous vehicles’ overall architecture and feasibility [7,9,10,11,12,13,14]. Nevertheless, only a tiny number of AES and AEB intervention systems are available right now, which could cause the lack of specific assessments and effective measures, especially from automakers.
As benchmarked to the EURO NCAP [5], more assessment development is possible and consolidated for the ASEAN NCAP safety protocols due to the safety assistance assessment for Euro NCAP and ASEAN NCAP contributing 20% to the overall rating [5,15]. However, the test assessment for Euro NCAP and ASEAN NCAP is slightly different. Therefore, this study analyses the existing research on the AES demand, AES assessments, AES control, AES system with AI, and AES testing methodology. The results of this study can be expanded further to combine the ASEAN NCAP safety rating systems program under the Malaysian Institute of Road Safety Research (MIROS).
This study might be beneficial not just in the academic world but also in the industrial world. In terms of academics, this study could benefit the universities’ research and development activities in furthering active safety, autonomous vehicles, AI, and machine learning (ML) topics. Meanwhile, in terms of industry, this study can help government agencies like MIROS prepare the AES guidelines for inclusion in the ASEAN NCAP rating scheme. Besides that, this study can also help industries such as automakers and automotive vendors leverage the guidelines to fit the AES in their future models.
2 Information search methods
Several search engine platforms were used to perform the research, including Google Patent, Google Scholar, Web of Science (WoS), and Scopus. “Autonomous emergency steering assessment” was the keyword used in Google Scholar and Patent search. In WoS, the phrase “autonomous emergency steering assessment” is followed by the terms “assessment,” “control,” “testing,” and “demand.” Additionally, Scopus searched for the terms “emergency steering,” “artificial intelligence,” “machine learning,” and “deep learning.” The most recent and significant works on AES demand, assessments, control, and testing techniques are discussed. Finally, the most relevant past articles related to the AES system’s integration with AI are chosen to be featured in this article.
3 Search results
Three articles from the industry [16,17,18] discussing the AES function in passenger automobiles were spotted as a result of an article search using the Google search platform. Other terminologies like emergency steering control (ESC) and emergency steering assist (ESA) are used instead of AES. However, the principle remains the same: to automate the steering to avoid a crash. AES development and its safety implications were discussed in previous research studies [7,9,10,11,12,13,14].
BWI Company [19], TRW Inc. [20], and Continental Teves AG [21] are the top three industry patent search results. They explained that since early 2000, AES research had continued the AEB study. The main concept behind AES is to forecast the escape path depending on the car’s surroundings and occasionally, the obstacle’s surroundings. In this case, AEB will lengthen the time until a collision occurs in order for AES to forecast the escape path and prevent the collision.
According to the search results on the WoS platform, research on AES assessment and AES demand elements is still limited in comparison to AES control and AES testing features. Using the keywords “assessment,” “demand,” and “control” in addition to “active emergency steering”, yielded nine and three articles, respectively. An extra control term yielded 61 articles, whereas the testing keyword yielded 22. The search’s outcome is reasonable since it must be fully developed before being evaluated. The AES technology evaluation outcome can provide insight into what ordinary people are looking for when purchasing a car. This article goes through a few publications that cover the AES evaluation, AES demand, AES control, and AES testing methodology, such as works by other researchers [22,23,24].
Around 1,000 documents turned up from a Scopus search for the phrase “emergency steering.” Figure 2 demonstrates how the emergency steering trend has increased year after year. The trend shows that this topic has been studied since 1924. However, researchers began to pay attention to this topic around 2010 and have continued to do so until the present. Furthermore, the addition of terms such as “artificial intelligence,” “machine learning,” and “deep learning” narrows the scope and makes the result more particular. The three categories have been recognized from all of the document results: road adhesion condition [25,26], driver condition identification [27,28,29,30,31,32,33], and rear-end collision [34,35,36,37,38,39,40,41,42,43,44,45,46,47]. Drowsiness detection [27,28] and driver behavior detection [29,30,31,32,33] are two identified sub-categories of driver condition detection. When it comes to road adhesion, potholes [25,26], cracks [25], and speed bumps [26] are usually found. In the meantime, in a rear-end collision, AI is used to identify the vehicle [34,35,36,37,38,39,40,41,42,43] and pedestrians [44,45,46,47]. However, only the front collision situations with a vehicle [34,35,36,37,38,39,40,41,42,43] are further investigated in this study to recognize the currently available approach used by previous studies.
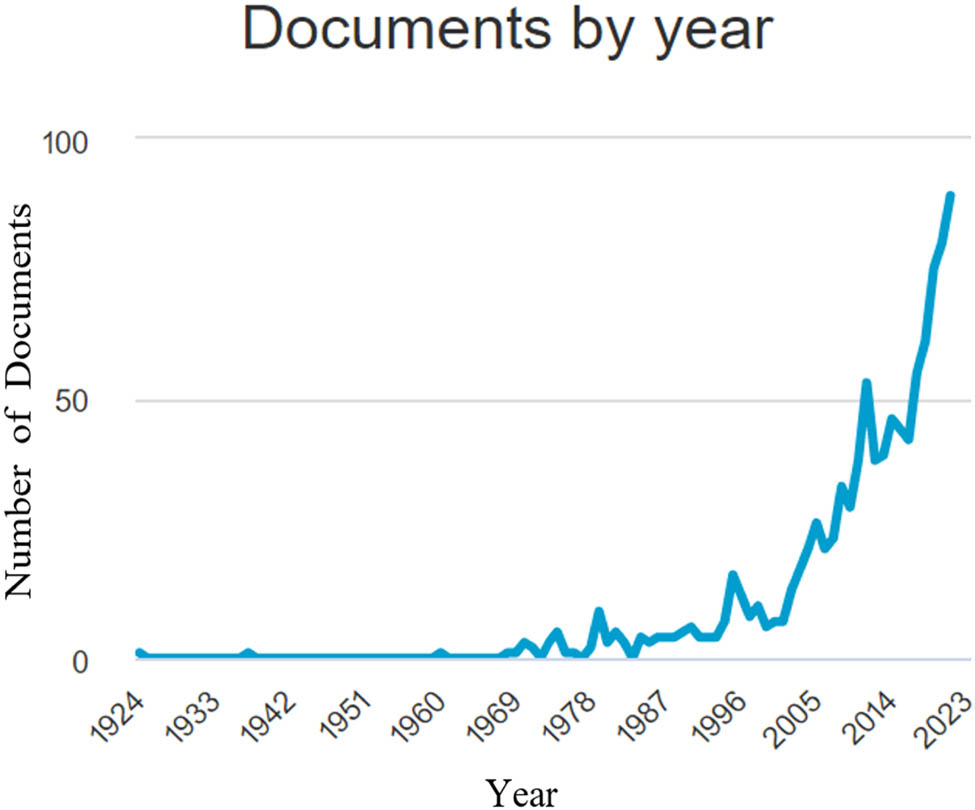
The research document trends throughout the years.
According to the review findings, just a few AEB intervention systems are now accessible, while AES technology is still in its early phases. That might explain the lack of exact evaluations and effective remedies. As a result, this research aims to offer evidence supporting the proposed methodology for assessing and evaluating AES in ASEAN NCAP.
4 Discussion
This section has five sub-sections: AES assessment, AES demand, AES control, AES system with AI, and AES testing methodology.
4.1 AES assessment
AES is one of the control methods for safety features presently being explored. An AES component must provide precise control on time based on suitable surroundings to address severe circumstances. AES is a significantly new technology, according to Euro NCAP, and modifications to laws are expected in 2022 to utilize its potential fully. When an expected collision is identified, AES will automatically steer to avoid accidents, which is an advantage over a safety system with AEB. Furthermore, the AES system might be integrated into an ADAS for upcoming automated or driverless cars. Several researchers have reported on the progress of their AES vehicles [23,24,48]. However, due to a lack of specialized assessments and practical methods, relatively few automated steering intervention systems are currently available. Appropriate evaluation is required to anticipate technology before it is released in the market, such as the ASEAN NCAP safety rating of a new automobile.
A change from a technology-based approach (e.g., solely testing for AES or AEB) to more scenario-based evaluations that allow for multiple sorts of interventions (e.g., braking and steering) is required [7]. Whatever technology emerges in the future, the assessment should be ready. Researchers have presented an example of a technology-based method [23,24]. An innovative ESC technique is based on a hierarchical control architecture with decision-making and motion control levels. The effectiveness of the suggested control technique for performing an emergency collision avoidance maneuver has increased. ESA devices and methods have been developed [16]. Continental, for example, a significant vehicle supplier, debuted its ContiGuard ESA system in 2010 [21]. 2 years later, a Japanese carmaker, Nissan, unveiled the concept of a self-developed helper that can drive itself in an emergency. TRW Automotive, on the other hand, has created radar and video camera-based driver assistance systems. The technology was expected to be ready for production in 2017, with applications for the 2018 model year [20].
4.2 AES demand
Many modern automobiles have safety and comfort features to address market expectations for minimizing road accidents. It is impossible to provide safety and comfort without combining steering and pedal control [49]. ADAS, lane departure warning systems, forward collision-avoidance, and adaptive cruise control are just a few of the safety innovations that have emerged as a result of these initiatives [34]. Because system failure is risky for the driver, researchers and automobile firms continue to argue the usefulness of the safety system. However, if the safety system evaluation demonstrates that it can work with a few mistakes, this is a beautiful chance to market the product and establish consumer trust [50]. Human error, such as a driver’s delayed response time owing to an unexpected presence of an impediment, causes crashes or accidents. Many collisions could be avoided or mitigated with the existing AEB technology. Although more technically challenging, AES may result in even more substantial reductions in collisions and fatalities, particularly in a single vehicle and minor overlap crashes, as well as accidents involving vulnerable road users such as bicycles and pedestrians [22].
4.3 AES control system
AES is a lateral safety mechanism that regulates steering rotation in a probable accident. Complex car models and hard math are used in the system. The main goal is to avoid colliding with the barrier by moving the steering wheel. AES control is designed to tackle collision avoidance difficulties in high-speed scenarios (highway traffic) [23,24], whereas AEB control is better suited to slow-speed settings (urban traffic) [18,21]. In high-speed conditions, the longitudinal distance to the obstruction is shorter, making AEB ineffective at preventing collisions. However, this does not imply that AES can function without AEB; instead, both systems must be used together. When a probable collision is identified, the driver must make many decisions and judgments, including “What is the obstacle type?” “Should I brake or steer at this point?” “Where can I go away?” and so on. There is so much data to analyze in a single second that the driver’s reaction time is delayed. Here ADAS, which combines the AES and AEB, assists the drivers by alerting them, braking the car, and turning the steering wheel. At first, the technology will warn the driver of impending crashes. An accident will occur if the motorist does not respond to brake until the last moment. When AEB is enabled, the vehicle speed in a lane is reduced, giving the driver more time to respond. Assuming the driver continues to fail to steer or have a reaction until the very last moment [16] and the steering torque is insufficient [49], in that circumstance, AES is engaged to prevent a collision by automatically changing lanes. The optimal braking distance that assures the AES’s effectiveness is still an unresolved problem that requires additional testing.
In Figure 3, the flow of the collision avoidance system is started by scanning the surrounding situation, such as the traffic conditions [9], road type [19], lane type [21], vehicle or pedestrian [22], static or dynamic [23], and obstacle type (big or small) [24]. The system should be concerned about the dimension in terms of obstacle type. The possibility of a rear-end collision will rise if the dimension is not evaluated. Hamid et al. [24] lengthened the obstruction using an invisible rectangle, resulting in more secure escape paths. Road, lane, and traffic data limit the best escape path alternatives. A pedestrian walkway, an incoming traffic lane, or a severely damaged road should not be considered the best escape paths [9]. The cameras, radar, and LIDAR are standard sensors used in the scanning process for determining the best escape path [16,18]. At least one sensor must produce information regarding the surroundings and the impending barrier [20]. The exchange of information between two vehicles can also improve data quality. Electronic maps may also gather environmental data over a broader region. However, they perform less precisely in tiny spaces than direct sensors on moving vehicles. The system then uses AES and AEB to follow the escape path trajectory with minimal error after choosing the best escape path.
![Figure 3
Algorithm flow of collision avoidance system by applying AEB and AES to track the escape route trajectory [3].](/document/doi/10.1515/eng-2022-0501/asset/graphic/j_eng-2022-0501_fig_003.jpg)
Algorithm flow of collision avoidance system by applying AEB and AES to track the escape route trajectory [3].
4.4 Integration of safety assist system with AI
Vehicle technology developments such as C-ITS, the IoT, AI in cars, and autonomous driving are significant development priorities for today’s global automakers [6]. They improved vehicle safety and made vehicles more intelligent and environmentally friendly. AI was developed in three primary areas [51]: ML, neural networks (NNs), and deep learning (DL). The Scopus search platform yielded a large number of results. However, as shown in Tables 1–3, only methods relating to rear-end collisions involving automobiles were included and discussed in this article.
Integration of safety assist system with ML
| Author(s) | Method | Parameter | Findings | Experiments | ||
|---|---|---|---|---|---|---|
| Input | Output | Strengths | Limitations | |||
| Guo et al. [34] | Fuzzy logic | Camera and sensors | Steering angle and brake |
|
|
Simulation and test on prototype autonomous vehicle |
|
||||||
| Huang et al. [35] | Fuzzy logic | Sensors | Steering angle and brake |
|
|
Simulation |
|
|
|||||
| Tork et al. [36] | MMNIT2FL | Sensors | Steering angle and brake |
|
|
Simulation |
|
|
|||||
|
||||||
Integration of safety assist system with NN
| Author(s) | Method | Parameter | Findings | Experiments | ||
|---|---|---|---|---|---|---|
| Input | Output | Strengths | Limitations | |||
| Wang et al. [37] | LSTM | Camera and sensors | Predict the lane change probabilities |
|
|
Simulation |
|
|
|||||
| Virdi [38] | Encoder–decoder LSTM | Velodyne laser scanner’s frame | Predict the future trajectory of obstacles |
|
|
Simulation |
|
|
|||||
| Bojarski et al. [39] | CNN | Camera | Steering angle |
|
|
Simulation and on-road tests |
|
||||||
| Hassan et al. [40] | Focused time delay neural network (FTDNN) | Front radar (Laser sensor), inertial measurement unit (IMU), steering encoder, and speed sensor | Steering angle |
|
|
Simulation with data from actual driving condition |
Integration of safety assist system with DL
| Author(s) | Method | Parameter | Findings | Experiments | ||
|---|---|---|---|---|---|---|
| Input | Output | Strengths | Limitations | |||
| Mohammed et al. [41] | DNN | Camera Cocoon Sensors (covers 360° around the vehicle) | Throttle, steering angle, and brake |
|
|
Simulation |
|
||||||
| Yoshimura et al. [42] | DRL | Camera | Throttle, steering angle, and brake |
|
|
Simulation and on-road test |
|
||||||
| Moghadam and Elkaim [43] | DRL | Sensors | Steering angle and brake |
|
|
Simulation |
|
|
|||||
The fuzzy logic [34,35,36] was found on the Scopus platform for the ML approach, as shown in Table 1. Guo et al. [34] and Huang et al. [35] developed a strategy for developing lane-change decision-making utilizing fuzzy logic to assure safety. Furthermore, Tork et al. [36] proposed combining two methods: ML and NN, which is Multilayer Neural Network modified by Interval Type-2 Fuzzy Logic (MMNIT2FL). This method can handle simultaneous steering and braking operations while avoiding sudden steering angle changes. Unfortunately, this method does not consider measurement error or different road conditions, and there is no real-time evaluation of the proposed approach.
In addition, for the NN approach, Convolutional Neural Network (CNN) [37,38] and Long Short-term Memory (LSTM) [39,40] were discovered. Wang et al. [37] and Virdi [38] utilized LSTM to train the data for generating the desired steering instruction. In contrast, Bojarski et al. [39] and Hassan et al. [40] employed CNN. The data were gathered on various roadways and in real-world driving situations. However, this technique has dataset limitations and focuses more on simulation than real-world situations.
Meanwhile, the search platform identified Deep Neural Networks (DNN) [41] and Deep Reinforcement Learning (DRL) [42,43] as DL methods. DNN was proposed as a technique by Mohammed et al. [41]. On the other hand, Yoshimura et al. [42] and Moghadam and Elkaim [43] employed DRL, a combination of DL and RL. Those methods yielded inspirational learning outcomes, such as identifying unexpected events covering challenging and diverse scenarios or situations the vehicle may encounter. However, these AES approaches lack safety and comfort.
Among the previous studies, [34,37,41,42] are four papers that are most similar to the topic under discussion. The approach in these papers was vision-based, and from these four, the most similar method was reported by Yoshimura et al. [42].
Guo et al. [34] provided a unique self-driving control technique for the coordinated regulation of steer and brake mechanics in vision-based autonomous cars, as illustrated in Figure 4. This work aimed to increase the qualities of safety and riding comfort successfully. In addition, it focuses on the coupled and nonlinear characteristics of autonomous cars in emergency obstacle avoidance, as well as a nonlinear coordinated braking and steering control technique. As shown in Figure 5, the adaptive fuzzy sliding mode control method and the theory of nonlinear backstepping control are used to construct a synchronized steering and braking control system. These two methods guarantee that a closed-loop system is both global approximation stable and uniformly ultimately bounded. The modeling and experimental testing results show that the proposed control strategy improves the tracking performance of autonomous cars and improves their riding comfort and stability, even under terrible driving circumstances. Furthermore, the total suggested control system has been applied to an experimental autonomous car.
![Figure 4
Typical scenarios for emergency obstacle avoidance [34].](/document/doi/10.1515/eng-2022-0501/asset/graphic/j_eng-2022-0501_fig_004.jpg)
Typical scenarios for emergency obstacle avoidance [34].
![Figure 5
Block diagram for coordination of steering and braking control [34].](/document/doi/10.1515/eng-2022-0501/asset/graphic/j_eng-2022-0501_fig_005.jpg)
Block diagram for coordination of steering and braking control [34].
In the study by Wang et al. [37], the ego-sensor vehicles may identify target-vehicle trajectories within their sensor range. The ego-vehicle forecasts if the target vehicle will switch lanes in front of it, as shown in Figure 6. There may be numerous cars in the next lanes between the ego-vehicle and its front vehicle. Therefore, these target vehicles could make independent judgments. As a result, each target vehicle’s behavior should be forecasted. The future lane change scenarios are classified one-to-one, with each case containing a target and an ego vehicle. The target vehicle is unique in each case, while an ego vehicle may exist in various circumstances. This case categorization overcomes the many-to-one dilemma between the target and ego vehicles.
![Figure 6
Scenario for forecasts if the target vehicle will switch lanes in front of it [37].](/document/doi/10.1515/eng-2022-0501/asset/graphic/j_eng-2022-0501_fig_006.jpg)
Scenario for forecasts if the target vehicle will switch lanes in front of it [37].
The adaptive lane change prediction model for nearby cars was built by Wang et al. [37] by adding an adaptive driving choice threshold to the traditional LSTM model, as shown in Figure 7. This was done considering LSTM’s strong performance in the current lane change prediction models. The model predicts lane change behaviors using data from the ego-vehicle and the target vehicle. They demonstrate that the model achieves 93.64–97.52% accuracy for the target car in the left adjacent lane and 94.30–98.01% accuracy for the target vehicle in the right adjacent lane, which are both impressive results. Furthermore, the model they offer can operate under various driving conditions.
![Figure 7
Structure algorithm of LSTM model [37].](/document/doi/10.1515/eng-2022-0501/asset/graphic/j_eng-2022-0501_fig_007.jpg)
Structure algorithm of LSTM model [37].
Mohammed et al. [41] created their benchmark using the CARLA simulator. They created 19 distinct scenarios spanning the whole highway town in CARLA, as shown in Figure 8, including inverted automobiles, road collisions, and cars stopping horizontally across two highways. Their performance is also influenced by two towns: CARLA town four and CARLA town five. These cities were chosen to represent highways. They tested their model in a different town with varied scenarios and settings to discover how well it can generalize to unknown situations. For each situation, the agent begins at a set point and attempts to reach a destination without colliding with other cars, roadside barriers, or other obstacles. However, in their simulation, they have a scenario where the agent is stranded and unable to complete the scenario.
![Figure 8
A few scenarios spanning the whole highway town in CARLA [41].](/document/doi/10.1515/eng-2022-0501/asset/graphic/j_eng-2022-0501_fig_008.jpg)
A few scenarios spanning the whole highway town in CARLA [41].
The feature extractor is a DNN, followed by fully connected layers to map the input. It consists of raw pixels from the camera lens and the vehicle speed in the current timestamp. The output is vehicle control of the three actions, throttle, steering angle, and brake, as illustrated in Figure 9. Their suggested approach architecture separated the four pictures by repeating the image route four times for each input image. They demonstrated that utilizing a bird’s eye view and sharing the exact parameters of the feature extraction component of the four photos in the network outperforms using a single image or not sharing the features. Furthermore, they demonstrated that the network had high generalization capabilities in many contexts.
![Figure 9
Structure algorithm of CNN model [41].](/document/doi/10.1515/eng-2022-0501/asset/graphic/j_eng-2022-0501_fig_009.jpg)
Structure algorithm of CNN model [41].
Yoshimura et al. [42] suggested that a DRL controller adjusts the steering angle and avoids an emergency crash. A predefined degree of brake is applied when an emergency scenario is identified. As shown in Figure 10, there are two case scenarios (a) and (b). In scenario (a), the car swerved right to avoid the scooter and came to a complete stop. In two objects scenario (b), the identical behavior would have resulted in a pedestrian accident. Thus, they highlight that their proposed controller took an additional effort to drive left to avoid a collision with the person. It demonstrates that the suggested controller considers the probability of a secondary collision and has learned to take the appropriate actions based on the scenario to prevent collisions with both objects.
![Figure 10
Emergency scenarios to adjust the steering angle and avoid a crash [42]; (a) one object scenario and (b) two objects scenario.](/document/doi/10.1515/eng-2022-0501/asset/graphic/j_eng-2022-0501_fig_010.jpg)
Emergency scenarios to adjust the steering angle and avoid a crash [42]; (a) one object scenario and (b) two objects scenario.
Yoshimura et al. validate the DRL controller [42] by modeling several traffic collision scenarios while training the controller in a simulated environment. These actions teach the DRL controller how to prepare ahead to prevent collisions in the simulated environment. The controller’s performance and stability are only assessed in a simulated environment. Validating performance in the simulation does not ensure that it will perform at the same level in the real world since there is always a difference between the scenario and the situation in the simulated environment. Therefore as a response, they additionally evaluated the DRL controller in realistic driving conditions utilizing the arrangement in a real car, as illustrated in Figure 11. The outcome demonstrated that the controller effectively generalizes to the outside world. However, this specific approach is inappropriate when a person is in the side lane since the controller’s secondary maneuver was insufficient to prevent a collision with the road user. Due to the restricted variety of training scenario simulations, this specific tendency has developed. More collision situations should be included to improve the performance further.
![Figure 11
Structure algorithm of DRL in the study by Yoshimura et al. [42].](/document/doi/10.1515/eng-2022-0501/asset/graphic/j_eng-2022-0501_fig_011.jpg)
Structure algorithm of DRL in the study by Yoshimura et al. [42].
The findings show that Guo et al. [34] focus solely on riding comfort and safety, whereas Wang et al. [37], Mohammed et al. [41], and Yoshimura et al. [42] tried to focus on avoiding two or more obstacles at once. Tables 1–3 summarize additional results for other papers.
4.5 AES test methodology
Simulation and experimentation are systematic methods used to evaluate the proposed AES control. There are benefits and drawbacks to both methods. The best method for validating the driving systems is experimentation [48], where AES is used in a real-world setting. Although the outcome is accurate, the fabrication of the collision scenario is challenging. For instance, Eckert et al. [17] showed how to fabricate collision scenarios in a closed circuit. In addition to guaranteeing the driver’s safety throughout the test, the researcher had to make sure the driver could sense the real-world circumstances during crashes in the experiment. The authors control the shock caused by the unexpected presence of an obstacle by not telling the test vehicle’s driver anything about it. The experiment’s results cannot be generalized because of the small number of people that participated in the testing.
Meanwhile, multiple scenarios may be tested in a short amount of time with minimal work and risk using the simulation technique [14]. Fortunately, the trustworthiness of simulation findings highly depends on the validation and verification of models with verifiable idealization. The scenario examples should be generated by real-world data, ensuring the experimental outcomes’ reliability. As a result, as proved by Kovaceva et al. [22], using both approaches will ensure the reliability of the experimental outcome.
When doing the testing, many situations are recommended over a limited amount. Multiple situations are created by varying the surrounding circumstances (obstacle, lane, and road type). Table 4 summarizes a collection of assessment situations from the reviews of relevant literature. In Figures 12–14, several typical scenarios are represented involving (1) A vehicle approaching a stationary or moving object, (2) A sudden object appearing from the side, and (3) A sudden object from the opposing vehicle’s lane crossing the lane. The vehicle must exit the lane. However, returning to the lane is optional once a collision is avoided.
List of the testing scenario of AES [2]
| Previous works | Scenario(s) | Scoring parameter |
|---|---|---|
| Yanagisawa et al. [14] | Sudden obstacle from the right side, the vehicle moves to escape the lane | The number of collision cases |
| Incoming moving obstacles from the opposite lane, the vehicle moves to the escape lane | Pedestrian’s injury degree | |
| Nissan Global [18] | In the front moving obstacle, the vehicle escapes the lane | Unreported |
| Sudden obstacle from the right side, the vehicle moves to escape the lane | ||
| Incoming moving obstacles from the opposite lane, the vehicle escapes the lane | ||
| Kovaceva et al. [22] | Slow obstacles come from the right and left when vehicles turn right, left, or straight in an intersection | Crash avoided or mitigated |
| If mitigated, what is the speed reduction? | ||
| Liu et al. [23] | In the front moving obstacle, the vehicle escapes the lane | Error of reference trajectory |
| Hamid et al. [24] | In front of one static obstacle, vehicles escape and return to the lane after avoidance | Error of reference trajectory |
| Vehicles escape the lane with two static obstacles in front of the vehicle | The calculation time of AES | |
| Two static obstacles in front of the vehicle, vehicles escape the lane and return after each crash avoidance | Time to collision during AES activation | |
| In front of the moving obstacle, vehicles escape and return to the lane after avoidance |
![Figure 12
Typical scenarios for AES testing: static or moving obstacle in the front [2].](/document/doi/10.1515/eng-2022-0501/asset/graphic/j_eng-2022-0501_fig_012.jpg)
Typical scenarios for AES testing: static or moving obstacle in the front [2].
![Figure 13
Typical scenarios for AES testing: the sudden appearance of obstacles from the adjacent lane [2].](/document/doi/10.1515/eng-2022-0501/asset/graphic/j_eng-2022-0501_fig_013.jpg)
Typical scenarios for AES testing: the sudden appearance of obstacles from the adjacent lane [2].
![Figure 14
Typical scenarios for AES testing: incoming obstacle crossing the lane [2].](/document/doi/10.1515/eng-2022-0501/asset/graphic/j_eng-2022-0501_fig_014.jpg)
Typical scenarios for AES testing: incoming obstacle crossing the lane [2].
The most critical point is that while trying to exit a lane, the framework must check that no other vehicles are present. Data reveal that loss of control is responsible for around 20% of Killed and Seriously Injured (KSI). Around 15% of all vehicle accidents involve a frontal collision with a minor overlap, while 25% of all frontal crashes involve a frontal collision [52]. This scenario accounts for around 10% of the KSI in mild overlap collisions. In contrast, KSI records 36% of vulnerable road users. As a result, considering all possible scenarios is critical and will aid AES development and implementation, particularly for manufacturers.
Avoidance occurrence and trajectory tracking error are the two types of rating methods presented. The incidence of avoidance is appropriate for evaluating the functioning of the AES. Simultaneously, trajectory tracking error is appropriate for evaluating AES control performance. In the case of the ASEAN NCAP safety rating, the scoring system based on avoidance occurrence (A_occur) is recommended since it clearly states the system’s advantage. For instance, the percentage of rear-end collisions that occur when the AES is used and the severity of injuries that occur when the AES is used to minimize rear-end collisions [9,14].
Table 5 shows the sample of a scoring sheet being discussed for inclusion into the 2021–2025 ASEAN NCAP assessment protocol under advanced safety assist technologies. Three categories have been divided on the proposed scoring sheet. The first is the fitment rating score (FRS), which indicates whether or not the AES system is available in the vehicle. The highest of one point is awarded if the vehicle’s model has AES as standard equipment. In the meantime, a vehicle model does not receive any points if it does not have AES. The A_occur is then determined through 10 trials. Higher scores indicate that the AES system is more effective at avoiding the obstacle. The proposed scoring chart also incorporates the level of comfort of the driving process. It is worth noting that the assessment criteria for the AES test are still under investigation before evaluation. With this assessment, car manufacturers are encouraged to introduce a technology that will help road users prevent road crashes [15].
Proposed scoring sheet for AES safety rating assessment
| No. | Item | Point | Score |
|---|---|---|---|
| 1. | FRS | ||
| The vehicle model is equipped with AES as standard equipment | 1.0 | ||
| The vehicle model is equipped with AES as optional equipment | 0.5 | ||
| The vehicle model is not equipped with AES | 0 | ||
| 2. | Avoidance Occurrence, A_occur in ten trials | ||
| A_occur = 100% | 4.00 | ||
| 70% ≤ A_occur < 100% | 3.00 | ||
| 40% ≤ A_occur < 70% | 2.00 | ||
| 0% ≤ A_occur < 40% | 1.00 | ||
| 3. | When the AES is active, the driver feels | ||
| So natural, like nothing happened | 4.00 | ||
| Confident the vehicle helps to avoid collisions | 3.00 | ||
| Shocked due to AES activation and maneuver | 2.00 | ||
| Annoyed due to AES activation | 1.00 | ||
| Total score | |||
Note: The FRS for advanced safety assist technologies will be based on Clause 8 in the 2021–2025 ASEAN NCAP PROTOCOL’s fitment rating system [53].
5 Conclusion
AES is made to turn the steering automatically in an emergency so the driver can avoid crashes. According to Euro NCAP, it is anticipated that the safety technology will be released soon. Despite this, there is still a lack of the required assessment framework, mainly because there are not many autonomous steering intervention systems available for evaluation right now. Previous research papers have demonstrated numerous situations utilized to test the proposed AES. The most frequent scenarios are the front obstruction, either stationary or moving, and the rapid emergence of barriers from the side lane. The future ASEAN NCAP safety rating standards may be developed using these scenarios to create a scenario-based evaluation system. The scoring mechanism is then proposed as avoidance occurrences. A high score or rating indicates a high incidence of avoidance and a low level of harm resulting from collision mitigation.
Hence, this study discusses the existing papers on AES assessment, AES demand, AES control, AES system with AI, and AES testing methodology. According to the review findings, just a few AEB intervention systems are now accessible, while AES technology is still in its early phases. That might explain the lack of exact evaluations and effective remedies. As a result, this research aims to offer evidence supporting the proposed methodology for assessing and evaluating AES in the ASEAN NCAP rating scheme. The results of this study can be further expanded to consolidate the ASEAN NCAP safety rating systems program under the MIROS.
-
Funding information: The authors would like to acknowledge the financial support from the Ministry of Education Malaysia under Fundamental Research Grant Scheme (FRGS) (FRGS/1/2021/TK0/UTM/02/42) and the ASEAN NCAP Collaborative Holistic Research (ANCHOR) under (A3-C21).
-
Conflict of interest: The authors state no conflict of interest.
References
[1] ACEA Road Safety. European Automobile Manufacturers Association; 2019.Search in Google Scholar
[2] Organization WH. The top 10 causes of death: World Heatlh Organization; 2020. https://www.who.int/news-room/fact-sheets/detail/the-top-10-causes-of-death.Search in Google Scholar
[3] Rasmana S, Adiputra D, Yahya W, Rahman MA, Dwijotomo A, Ariff MM, et al. A systematic review on the autonomous emergency steering assessments and tests methodology in ASEAN. J Soc Automot Eng Malays. 2021;5(2):185–93.10.56381/jsaem.v5i2.163Search in Google Scholar
[4] Euro NCAP 2025 roadmap: In pursuit of vision zero. Euro NCAP; 2017.Search in Google Scholar
[5] Euro NCAP Assessment Protocol. Safety Assist Collision Avoidance. Euro NCAP; 2022.Search in Google Scholar
[6] NAP 2020. Ministry of international trade and industry; 2020.Search in Google Scholar
[7] ASEAN NCAP Roadmap 2021-2025. ASEAN NCAP; 2018.Search in Google Scholar
[8] Serban AC, Poll E, Visser J, editors. A standard driven software architecture for fully autonomous vehicles. 2018 IEEE International Conference on Software Architecture Companion (ICSA-C). IEEE; 2018.10.1109/ICSA-C.2018.00040Search in Google Scholar
[9] Kritayakirana K, Gerdes JC. Using the centre of percussion to design a steering controller for an autonomous race car. Veh Syst Dyn. 2012;50(sup1):33–51.10.1080/00423114.2012.672842Search in Google Scholar
[10] Gao Y, Gray A, Tseng HE, Borrelli F. A tube-based robust nonlinear predictive control approach to semiautonomous ground vehicles. Veh Syst Dyn. 2014;52(6):802–23.10.1080/00423114.2014.902537Search in Google Scholar
[11] Liu Y, Fan X, Lv C, Wu J, Li L, Ding D. An innovative information fusion method with adaptive Kalman filter for integrated INS/GPS navigation of autonomous vehicles. Mech Syst Signal Process. 2018;100:605–16.10.1016/j.ymssp.2017.07.051Search in Google Scholar
[12] Hu X, Chen L, Tang B, Cao D, He H. Dynamic path planning for autonomous driving on various roads with avoidance of static and moving obstacles. Mech Syst Signal Process. 2018;100:482–500.10.1016/j.ymssp.2017.07.019Search in Google Scholar
[13] Jeong E, Oh C. Evaluating the effectiveness of active vehicle safety systems. Accid Anal Prev. 2017;100:85–96.10.1016/j.aap.2017.01.015Search in Google Scholar PubMed
[14] Yanagisawa M, Swanson E, Azeredo P, Najm W. Estimation of potential safety benefits for pedestrian crash avoidance/mitigation systems. United States. National Highway Traffic Safety Administration; 2017.Search in Google Scholar
[15] ASEAN NCAP. Assessment Protocol Safety Assist. ASEAN NCAP; 2019.Search in Google Scholar
[16] Online CN. Emergency Steering Assist; 2014. https://can-newsletter.org/engineering/engineering- iscellaneous/140813_emergency-steering-assist.Search in Google Scholar
[17] Eckert A, Hartmann B, Sevenich M, Rieth P, editors. Emergency steer & brake assist: a systematic approach for system integration of two complementary driver assistance systems. 22nd International Technical Conference on the Enhanced Safety of Vehicles (ESV); 2011.Search in Google Scholar
[18] Corporation NM. Autonomous Emergency Steering System. https://www.nissan-global.com/EN/INNOVATION/TECHNOLOGY/ARCHIVE/AUTONOMOUS_EMERGENCY_STEERING_SYSTEM/.Search in Google Scholar
[19] Hac AB, Dickinson JE, inventors; BWI Co Ltd SA, assignee. Collision avoidance with active steering and braking, US pat., 7016783B2, 2006.Search in Google Scholar
[20] Carsten H, Torsten B, Martin K, inventors; ZF Automotive Germany GmbH, assignee. Control Device and Method for Emergency Steering Assist Function. Germany; 2014.Search in Google Scholar
[21] Hartmann A, Bian N, Bretzigheimer K, Staab T, Förster D, Inventors; Continental Teves AG and Co oHG, assignee. Limiting the activation of an emergency steer assistant, US pat., 9691282B2, 2017.Search in Google Scholar
[22] Kovaceva J, Bálint A, Schindler R, Schneider A. Safety benefit assessment of autonomous emergency braking and steering systems for the protection of cyclists and pedestrians based on a combination of computer simulation and real-world test results. Accid Anal & Prev. 2020;136:105352.10.1016/j.aap.2019.105352Search in Google Scholar PubMed
[23] Liu R, Wei M, Zhao W. Trajectory tracking control of four wheel steering under high speed emergency obstacle avoidance. Int J Veh Des. 2018;77(1–2):1–21.10.1504/IJVD.2018.098265Search in Google Scholar
[24] Hamid UZA, Ariff MHM, Zamzuri H, Saito Y, Zakaria MA, Rahman MAA, et al. Piecewise trajectory replanner for highway collision avoidance systems with safe-distance based threat assessment strategy and nonlinear model predictive control. J Intell & Robotic Syst. 2017;90(3–4):363–85.10.1007/s10846-017-0665-8Search in Google Scholar
[25] Bibi R, Saeed Y, Zeb A, Ghazal TM, Rahman T, Said RA, et al. Edge AI-based automated detection and classification of road anomalies in VANET using deep learning. Comput Intell Neurosci. 2021;2021:6262194.10.1155/2021/6262194Search in Google Scholar PubMed PubMed Central
[26] Haris M, Hou J. Obstacle detection and safely navigate the autonomous vehicle from unexpected obstacles on the driving lane. Sens (Basel). 2020;20(17):4719.10.3390/s20174719Search in Google Scholar PubMed PubMed Central
[27] Hong S, Baek HJ. Drowsiness detection based on intelligent systems with nonlinear features for optimal placement of encephalogram electrodes on the cerebral area. Sensors. 2021;21(4):1255.10.3390/s21041255Search in Google Scholar PubMed PubMed Central
[28] Rundo F, Spampinato C, Conoci S. Ad-hoc shallow neural network to learn hyper filtered photoplethysmographic (PPG) signal for efficient car-driver drowsiness monitoring. Electronics 2019;8(8):890.10.3390/electronics8080890Search in Google Scholar
[29] Naranjo JE, Reviejo J, González C, García R, Pedro Td, editors. A throttle and brake fuzzy controller: towards the automatic car. International Conference on Computer Aided Systems Theory. Springer; 2003.10.1007/978-3-540-45210-2_27Search in Google Scholar
[30] Kong X, Das S, Zhang Y. Mining patterns of near-crash events with and without secondary tasks. Accid Anal & Prev. 2021;157:106162.10.1016/j.aap.2021.106162Search in Google Scholar PubMed
[31] McDonald AD, Alambeigi H, Engström J, Markkula G, Vogelpohl T, Dunne J, et al. Toward computational simulations of behavior during automated driving takeovers: a review of the empirical and modeling literatures. Hum factors. 2019;61(4):642–88.10.1177/0018720819829572Search in Google Scholar PubMed
[32] Schnelle S, Wang J, Su H-J, Jagacinski R. A personalizable driver steering model capable of predicting driver behaviors in vehicle collision avoidance maneuvers. IEEE Trans Hum Machi Syst. 2016;47(5):625–35.10.1109/THMS.2016.2608930Search in Google Scholar
[33] Bi L, Wang C, Yang X, Wang M, Liu Y. Detecting driver normal and emergency lane-changing intentions with queuing network-based driver models. Int J Hum Comp Interact. 2015;31(2):139–45.10.1080/10447318.2014.986638Search in Google Scholar
[34] Guo J, Hu P, Wang R. Nonlinear coordinated steering and braking control of vision-based autonomous vehicles in emergency obstacle avoidance. IEEE Trans Intell Transport Syst. 2016;17(11):3230–40.10.1109/TITS.2016.2544791Search in Google Scholar
[35] Huang C, Lv C, Hang P, Xing Y. Toward safe and personalized autonomous driving: decision-making and motion control with DPF and CDT techniques. IEEE/ASME Trans Mechatron. 2021;26(2):611–20.10.1109/TMECH.2021.3053248Search in Google Scholar
[36] Tork N, Amirkhani A, Shokouhi SB. An adaptive modified neural lateral-longitudinal control system for path following of autonomous vehicles. Eng Sci Technolo Int J. 2021;24(1):126–37.10.1016/j.jestch.2020.12.004Search in Google Scholar
[37] Wang J, Zhang Z, Lu G. A Bayesian inference based adaptive lane change prediction model. Transport Res Part C Emerg Technol. 2021;132:103363.10.1016/j.trc.2021.103363Search in Google Scholar
[38] Virdi J. Using deep learning to predict obstacle trajectories for collision avoidance in autonomous vehicles. San Diego: University of California; 2018.Search in Google Scholar
[39] Bojarski M, Del Testa D, Dworakowski D, Firner B, Flepp B, Goyal P, et al. End to end learning for self-driving cars. arXiv Preprint arXiv:160407316; 2016.Search in Google Scholar
[40] Hassan N, Zamzuri H, Ariff MHM, editors. Modelling of driver's steering behaviour control in emergency collision avoidance by using focused time delay neural network. 2018 International Conference on Information and Communications Technology (ICOIACT). IEEE; 2018.10.1109/ICOIACT.2018.8350750Search in Google Scholar
[41] Mohammed E, Abdou M, Nasr OA, editors. End-to-end deep path planning and automatic emergency braking camera cocoon-based solution. Machine Learning for Autonomous Driving, NeurIPS 2019 Workshop; 2019.Search in Google Scholar
[42] Yoshimura M, Fujimoto G, Kaushik A, Padi BK, Dennison M, Sood I, et al., editors. Autonomous emergency steering using deep reinforcement learning for advanced driver assistance system. 2020 59th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE). IEEE; 2020.10.23919/SICE48898.2020.9240358Search in Google Scholar
[43] Moghadam M, Elkaim GH. An autonomous driving framework for long-term decision-making and short-term trajectory planning on Frenet space. 2021 IEEE 17th International Conference on Automation Science and Engineering (CASE); 2021. p. 1745–50.10.1109/CASE49439.2021.9551559Search in Google Scholar
[44] Robinson MD, Beal CE, Brennan SN. At what cost? How planned collisions with pedestrians may save lives. Accid Anal Prev. 2020;141:105492.10.1016/j.aap.2020.105492Search in Google Scholar PubMed
[45] Braeuchle C, Flehmig F, Rosenstiel W, Kropf T, editors. Maneuver decision for active pedestrian protection under uncertainty. 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013). IEEE; 2013.10.1109/ITSC.2013.6728304Search in Google Scholar
[46] Goldhammer M, Gerhard M, Zernetsch S, Doll K, Brunsmann U, editors. Early prediction of a pedestrian's trajectory at intersections. 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013). IEEE; 2013.10.1109/ITSC.2013.6728239Search in Google Scholar
[47] Llorca DF, Milanés V, Alonso IP, Gavilán M, Daza IG, Pérez J, et al. Autonomous pedestrian collision avoidance using a fuzzy steering controller. IEEE Trans Intell TransportatiSyst. 2011;12(2):390–401.10.1109/TITS.2010.2091272Search in Google Scholar
[48] Nilsson J. Computational verification methods for automotive safety systems. Sweden: Chalmers Tekniska Hogskola; 2014.Search in Google Scholar
[49] Morando A. Drivers’ response to attentional demand in automated driving. Sweden: Chalmers Tekniska Hogskola; 2019.Search in Google Scholar
[50] Victor TW, Tivesten E, Gustavsson P, Johansson J, Sangberg F, Ljung Aust M. Automation expectation mismatch: Incorrect prediction despite eyes on threat and hands on wheel. Hum factors. 2018;60(8):1095–116.10.1177/0018720818788164Search in Google Scholar PubMed PubMed Central
[51] Khayyam H, Javadi B, Jalili M, Jazar RN. Artificial intelligence and internet of things for autonomous vehicles. Nonlinear approaches in engineering applications. Springer; 2020. p. 39–68.10.1007/978-3-030-18963-1_2Search in Google Scholar
[52] Kuehn M, Hummel T, Bende J, editors. Small-overlap frontal impacts involving passenger cars in Germany. Proc 23rd International ESV Technical Conference [book on CD-ROM] National Highway Traffic Safety Administration, Washington, DC; 2013.Search in Google Scholar
[53] ASEAN NCAP. Fitment Rating System. ASEAN NCAP; 2019.Search in Google Scholar
© 2023 the author(s), published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Regular Articles
- Design optimization of a 4-bar exoskeleton with natural trajectories using unique gait-based synthesis approach
- Technical review of supervised machine learning studies and potential implementation to identify herbal plant dataset
- Effect of ECAP die angle and route type on the experimental evolution, crystallographic texture, and mechanical properties of pure magnesium
- Design and characteristics of two-dimensional piezoelectric nanogenerators
- Hybrid and cognitive digital twins for the process industry
- Discharge predicted in compound channels using adaptive neuro-fuzzy inference system (ANFIS)
- Human factors in aviation: Fatigue management in ramp workers
- LLDPE matrix with LDPE and UV stabilizer additive to evaluate the interface adhesion impact on the thermal and mechanical degradation
- Dislocated time sequences – deep neural network for broken bearing diagnosis
- Estimation method of corrosion current density of RC elements
- A computational iterative design method for bend-twist deformation in composite ship propeller blades for thrusters
- Compressive forces influence on the vibrations of double beams
- Research on dynamical properties of a three-wheeled electric vehicle from the point of view of driving safety
- Risk management based on the best value approach and its application in conditions of the Czech Republic
- Effect of openings on simply supported reinforced concrete skew slabs using finite element method
- Experimental and simulation study on a rooftop vertical-axis wind turbine
- Rehabilitation of overload-damaged reinforced concrete columns using ultra-high-performance fiber-reinforced concrete
- Performance of a horizontal well in a bounded anisotropic reservoir: Part II: Performance analysis of well length and reservoir geometry
- Effect of chloride concentration on the corrosion resistance of pure Zn metal in a 0.0626 M H2SO4 solution
- Numerical and experimental analysis of the heat transfer process in a railway disc brake tested on a dynamometer stand
- Design parameters and mechanical efficiency of jet wind turbine under high wind speed conditions
- Architectural modeling of data warehouse and analytic business intelligence for Bedstead manufacturers
- Influence of nano chromium addition on the corrosion and erosion–corrosion behavior of cupronickel 70/30 alloy in seawater
- Evaluating hydraulic parameters in clays based on in situ tests
- Optimization of railway entry and exit transition curves
- Daily load curve prediction for Jordan based on statistical techniques
- Review Articles
- A review of rutting in asphalt concrete pavement
- Powered education based on Metaverse: Pre- and post-COVID comprehensive review
- A review of safety test methods for new car assessment program in Southeast Asian countries
- Communication
- StarCrete: A starch-based biocomposite for off-world construction
- Special Issue: Transport 2022 - Part I
- Analysis and assessment of the human factor as a cause of occurrence of selected railway accidents and incidents
- Testing the way of driving a vehicle in real road conditions
- Research of dynamic phenomena in a model engine stand
- Testing the relationship between the technical condition of motorcycle shock absorbers determined on the diagnostic line and their characteristics
- Retrospective analysis of the data concerning inspections of vehicles with adaptive devices
- Analysis of the operating parameters of electric, hybrid, and conventional vehicles on different types of roads
- Special Issue: 49th KKBN - Part II
- Influence of a thin dielectric layer on resonance frequencies of square SRR metasurface operating in THz band
- Influence of the presence of a nitrided layer on changes in the ultrasonic wave parameters
- Special Issue: ICRTEEC - 2021 - Part III
- Reverse droop control strategy with virtual resistance for low-voltage microgrid with multiple distributed generation sources
- Special Issue: AESMT-2 - Part II
- Waste ceramic as partial replacement for sand in integral waterproof concrete: The durability against sulfate attack of certain properties
- Assessment of Manning coefficient for Dujila Canal, Wasit/-Iraq
- Special Issue: AESMT-3 - Part I
- Modulation and performance of synchronous demodulation for speech signal detection and dialect intelligibility
- Seismic evaluation cylindrical concrete shells
- Investigating the role of different stabilizers of PVCs by using a torque rheometer
- Investigation of high-turbidity tap water problem in Najaf governorate/middle of Iraq
- Experimental and numerical evaluation of tire rubber powder effectiveness for reducing seepage rate in earth dams
- Enhancement of air conditioning system using direct evaporative cooling: Experimental and theoretical investigation
- Assessment for behavior of axially loaded reinforced concrete columns strengthened by different patterns of steel-framed jacket
- Novel graph for an appropriate cross section and length for cantilever RC beams
- Discharge coefficient and energy dissipation on stepped weir
- Numerical study of the fluid flow and heat transfer in a finned heat sink using Ansys Icepak
- Integration of numerical models to simulate 2D hydrodynamic/water quality model of contaminant concentration in Shatt Al-Arab River with WRDB calibration tools
- Study of the behavior of reactive powder concrete RC deep beams by strengthening shear using near-surface mounted CFRP bars
- The nonlinear analysis of reactive powder concrete effectiveness in shear for reinforced concrete deep beams
- Activated carbon from sugarcane as an efficient adsorbent for phenol from petroleum refinery wastewater: Equilibrium, kinetic, and thermodynamic study
- Structural behavior of concrete filled double-skin PVC tubular columns confined by plain PVC sockets
- Probabilistic derivation of droplet velocity using quadrature method of moments
- A study of characteristics of man-made lightweight aggregate and lightweight concrete made from expanded polystyrene (eps) and cement mortar
- Effect of waste materials on soil properties
- Experimental investigation of electrode wear assessment in the EDM process using image processing technique
- Punching shear of reinforced concrete slabs bonded with reactive powder after exposure to fire
- Deep learning model for intrusion detection system utilizing convolution neural network
- Improvement of CBR of gypsum subgrade soil by cement kiln dust and granulated blast-furnace slag
- Investigation of effect lengths and angles of the control devices below the hydraulic structure
- Finite element analysis for built-up steel beam with extended plate connected by bolts
- Finite element analysis and retrofit of the existing reinforced concrete columns in Iraqi schools by using CFRP as confining technique
- Performing laboratory study of the behavior of reactive powder concrete on the shear of RC deep beams by the drilling core test
- Special Issue: AESMT-4 - Part I
- Depletion zones of groundwater resources in the Southwest Desert of Iraq
- A case study of T-beams with hybrid section shear characteristics of reactive powder concrete
- Feasibility studies and their effects on the success or failure of investment projects. “Najaf governorate as a model”
- Optimizing and coordinating the location of raw material suitable for cement manufacturing in Wasit Governorate, Iraq
- Effect of the 40-PPI copper foam layer height on the solar cooker performance
- Identification and investigation of corrosion behavior of electroless composite coating on steel substrate
- Improvement in the California bearing ratio of subbase soil by recycled asphalt pavement and cement
- Some properties of thermal insulating cement mortar using Ponza aggregate
- Assessment of the impacts of land use/land cover change on water resources in the Diyala River, Iraq
- Effect of varied waste concrete ratios on the mechanical properties of polymer concrete
- Effect of adverse slope on performance of USBR II stilling basin
- Shear capacity of reinforced concrete beams with recycled steel fibers
- Extracting oil from oil shale using internal distillation (in situ retorting)
- Influence of recycling waste hardened mortar and ceramic rubbish on the properties of flowable fill material
- Rehabilitation of reinforced concrete deep beams by near-surface-mounted steel reinforcement
- Impact of waste materials (glass powder and silica fume) on features of high-strength concrete
- Studying pandemic effects and mitigation measures on management of construction projects: Najaf City as a case study
- Design and implementation of a frequency reconfigurable antenna using PIN switch for sub-6 GHz applications
- Average monthly recharge, surface runoff, and actual evapotranspiration estimation using WetSpass-M model in Low Folded Zone, Iraq
- Simple function to find base pressure under triangular and trapezoidal footing with two eccentric loads
- Assessment of ALINEA method performance at different loop detector locations using field data and micro-simulation modeling via AIMSUN
- Special Issue: AESMT-5 - Part I
- Experimental and theoretical investigation of the structural behavior of reinforced glulam wooden members by NSM steel bars and shear reinforcement CFRP sheet
- Improving the fatigue life of composite by using multiwall carbon nanotubes
- A comparative study to solve fractional initial value problems in discrete domain
- Assessing strength properties of stabilized soils using dynamic cone penetrometer test
- Investigating traffic characteristics for merging sections in Iraq
- Enhancement of flexural behavior of hybrid flat slab by using SIFCON
- The main impacts of a managed aquifer recharge using AHP-weighted overlay analysis based on GIS in the eastern Wasit province, Iraq
Articles in the same Issue
- Regular Articles
- Design optimization of a 4-bar exoskeleton with natural trajectories using unique gait-based synthesis approach
- Technical review of supervised machine learning studies and potential implementation to identify herbal plant dataset
- Effect of ECAP die angle and route type on the experimental evolution, crystallographic texture, and mechanical properties of pure magnesium
- Design and characteristics of two-dimensional piezoelectric nanogenerators
- Hybrid and cognitive digital twins for the process industry
- Discharge predicted in compound channels using adaptive neuro-fuzzy inference system (ANFIS)
- Human factors in aviation: Fatigue management in ramp workers
- LLDPE matrix with LDPE and UV stabilizer additive to evaluate the interface adhesion impact on the thermal and mechanical degradation
- Dislocated time sequences – deep neural network for broken bearing diagnosis
- Estimation method of corrosion current density of RC elements
- A computational iterative design method for bend-twist deformation in composite ship propeller blades for thrusters
- Compressive forces influence on the vibrations of double beams
- Research on dynamical properties of a three-wheeled electric vehicle from the point of view of driving safety
- Risk management based on the best value approach and its application in conditions of the Czech Republic
- Effect of openings on simply supported reinforced concrete skew slabs using finite element method
- Experimental and simulation study on a rooftop vertical-axis wind turbine
- Rehabilitation of overload-damaged reinforced concrete columns using ultra-high-performance fiber-reinforced concrete
- Performance of a horizontal well in a bounded anisotropic reservoir: Part II: Performance analysis of well length and reservoir geometry
- Effect of chloride concentration on the corrosion resistance of pure Zn metal in a 0.0626 M H2SO4 solution
- Numerical and experimental analysis of the heat transfer process in a railway disc brake tested on a dynamometer stand
- Design parameters and mechanical efficiency of jet wind turbine under high wind speed conditions
- Architectural modeling of data warehouse and analytic business intelligence for Bedstead manufacturers
- Influence of nano chromium addition on the corrosion and erosion–corrosion behavior of cupronickel 70/30 alloy in seawater
- Evaluating hydraulic parameters in clays based on in situ tests
- Optimization of railway entry and exit transition curves
- Daily load curve prediction for Jordan based on statistical techniques
- Review Articles
- A review of rutting in asphalt concrete pavement
- Powered education based on Metaverse: Pre- and post-COVID comprehensive review
- A review of safety test methods for new car assessment program in Southeast Asian countries
- Communication
- StarCrete: A starch-based biocomposite for off-world construction
- Special Issue: Transport 2022 - Part I
- Analysis and assessment of the human factor as a cause of occurrence of selected railway accidents and incidents
- Testing the way of driving a vehicle in real road conditions
- Research of dynamic phenomena in a model engine stand
- Testing the relationship between the technical condition of motorcycle shock absorbers determined on the diagnostic line and their characteristics
- Retrospective analysis of the data concerning inspections of vehicles with adaptive devices
- Analysis of the operating parameters of electric, hybrid, and conventional vehicles on different types of roads
- Special Issue: 49th KKBN - Part II
- Influence of a thin dielectric layer on resonance frequencies of square SRR metasurface operating in THz band
- Influence of the presence of a nitrided layer on changes in the ultrasonic wave parameters
- Special Issue: ICRTEEC - 2021 - Part III
- Reverse droop control strategy with virtual resistance for low-voltage microgrid with multiple distributed generation sources
- Special Issue: AESMT-2 - Part II
- Waste ceramic as partial replacement for sand in integral waterproof concrete: The durability against sulfate attack of certain properties
- Assessment of Manning coefficient for Dujila Canal, Wasit/-Iraq
- Special Issue: AESMT-3 - Part I
- Modulation and performance of synchronous demodulation for speech signal detection and dialect intelligibility
- Seismic evaluation cylindrical concrete shells
- Investigating the role of different stabilizers of PVCs by using a torque rheometer
- Investigation of high-turbidity tap water problem in Najaf governorate/middle of Iraq
- Experimental and numerical evaluation of tire rubber powder effectiveness for reducing seepage rate in earth dams
- Enhancement of air conditioning system using direct evaporative cooling: Experimental and theoretical investigation
- Assessment for behavior of axially loaded reinforced concrete columns strengthened by different patterns of steel-framed jacket
- Novel graph for an appropriate cross section and length for cantilever RC beams
- Discharge coefficient and energy dissipation on stepped weir
- Numerical study of the fluid flow and heat transfer in a finned heat sink using Ansys Icepak
- Integration of numerical models to simulate 2D hydrodynamic/water quality model of contaminant concentration in Shatt Al-Arab River with WRDB calibration tools
- Study of the behavior of reactive powder concrete RC deep beams by strengthening shear using near-surface mounted CFRP bars
- The nonlinear analysis of reactive powder concrete effectiveness in shear for reinforced concrete deep beams
- Activated carbon from sugarcane as an efficient adsorbent for phenol from petroleum refinery wastewater: Equilibrium, kinetic, and thermodynamic study
- Structural behavior of concrete filled double-skin PVC tubular columns confined by plain PVC sockets
- Probabilistic derivation of droplet velocity using quadrature method of moments
- A study of characteristics of man-made lightweight aggregate and lightweight concrete made from expanded polystyrene (eps) and cement mortar
- Effect of waste materials on soil properties
- Experimental investigation of electrode wear assessment in the EDM process using image processing technique
- Punching shear of reinforced concrete slabs bonded with reactive powder after exposure to fire
- Deep learning model for intrusion detection system utilizing convolution neural network
- Improvement of CBR of gypsum subgrade soil by cement kiln dust and granulated blast-furnace slag
- Investigation of effect lengths and angles of the control devices below the hydraulic structure
- Finite element analysis for built-up steel beam with extended plate connected by bolts
- Finite element analysis and retrofit of the existing reinforced concrete columns in Iraqi schools by using CFRP as confining technique
- Performing laboratory study of the behavior of reactive powder concrete on the shear of RC deep beams by the drilling core test
- Special Issue: AESMT-4 - Part I
- Depletion zones of groundwater resources in the Southwest Desert of Iraq
- A case study of T-beams with hybrid section shear characteristics of reactive powder concrete
- Feasibility studies and their effects on the success or failure of investment projects. “Najaf governorate as a model”
- Optimizing and coordinating the location of raw material suitable for cement manufacturing in Wasit Governorate, Iraq
- Effect of the 40-PPI copper foam layer height on the solar cooker performance
- Identification and investigation of corrosion behavior of electroless composite coating on steel substrate
- Improvement in the California bearing ratio of subbase soil by recycled asphalt pavement and cement
- Some properties of thermal insulating cement mortar using Ponza aggregate
- Assessment of the impacts of land use/land cover change on water resources in the Diyala River, Iraq
- Effect of varied waste concrete ratios on the mechanical properties of polymer concrete
- Effect of adverse slope on performance of USBR II stilling basin
- Shear capacity of reinforced concrete beams with recycled steel fibers
- Extracting oil from oil shale using internal distillation (in situ retorting)
- Influence of recycling waste hardened mortar and ceramic rubbish on the properties of flowable fill material
- Rehabilitation of reinforced concrete deep beams by near-surface-mounted steel reinforcement
- Impact of waste materials (glass powder and silica fume) on features of high-strength concrete
- Studying pandemic effects and mitigation measures on management of construction projects: Najaf City as a case study
- Design and implementation of a frequency reconfigurable antenna using PIN switch for sub-6 GHz applications
- Average monthly recharge, surface runoff, and actual evapotranspiration estimation using WetSpass-M model in Low Folded Zone, Iraq
- Simple function to find base pressure under triangular and trapezoidal footing with two eccentric loads
- Assessment of ALINEA method performance at different loop detector locations using field data and micro-simulation modeling via AIMSUN
- Special Issue: AESMT-5 - Part I
- Experimental and theoretical investigation of the structural behavior of reinforced glulam wooden members by NSM steel bars and shear reinforcement CFRP sheet
- Improving the fatigue life of composite by using multiwall carbon nanotubes
- A comparative study to solve fractional initial value problems in discrete domain
- Assessing strength properties of stabilized soils using dynamic cone penetrometer test
- Investigating traffic characteristics for merging sections in Iraq
- Enhancement of flexural behavior of hybrid flat slab by using SIFCON
- The main impacts of a managed aquifer recharge using AHP-weighted overlay analysis based on GIS in the eastern Wasit province, Iraq