Real-Time Map Matching: A New Algorithm Integrating Spatio-Temporal Proximity and Improved Weighted Circle
-
Wenxin Teng


Abstract
Previous real-time map matching algorithms for in-vehicle navigation systems had some efficiencies and defects on time lagging and low accuracy. As a response, this paper proposes a new algorithm that integrates STP (spatio-temporal proximity) and IWC (improved weighted circle), in which the new algorithm proposes STP to dynamically refine candidate matching roads, and IWC to adaptively identify the optimal matching road. Specifically, three spatio-temporal proximity indicators are defined in STP to build a three-dimensional stereoscopic cone, and then the two-dimensional projection of the cone are adopted to dynamically select the candidate matching roads. Further, by adaptively setting the weight, the IWC algorithm is developed to integrate three new parameters to adaptively determine the optimal matching road. The test results show that the matching accuracy of the algorithm is over 95%, much higher than that of the existing algorithm, which demonstrates the feasibility and efficiency of the new algorithm.
1 Introduction
With the rapid progress of Intelligent Transportation Systems (ITS), global positioning system (GPS)-based in-vehicle navigation systems are being widely used to provide location information in a range of transport telematics applications and services, e.g., real-time tracking of vehicle location, predicting vehicle trajectory, etc. [1, 2, 3]. Accurate real-time vehicle positioning exists as a prerequisite and foundation for the implementation of the above navigation functions, which usually relies on the implementation of map matching algorithms. As an important technology in vehicle positioning, real-time map matching uses vector map information integrating various positioning sensor data (e.g., GPS, GPS / INS, etc.) to produce the best estimate of a vehicle’s physical location, and help overcome the influence of some factors such as GPS error and vector electronic map error, so as to make the GPS trajectory match the corresponding position of road features in vector electronic maps, and to provide the positioning basis for more advanced path planning(e.g., autonomous vehicle, etc.) and navigation guidance functions (e.g., vehicle dispatch, etc.). However, most of the previous algorithms had the shortcomings of lag time or low precision so that real-time map matching cannot be supported. Therefore, shorting the time of real-time positioning and improving positioning accuracy become an urgent challenge for real-time map matching.
2 Literature Review
Map matching algorithm has been actively studied since 90‘s. Map matching in the early 1990s directly used GPS to solve the positioning problem, resulting in a larger error and longer positioning time. To respond it, researchers developed various algorithms and divided the map matching into two steps (selecting candidate matching roads and identifying the best matching road). For the first step, many scholars have studied various algorithms to select candidate matching roads, including: (1) Geometric [4, 5]. These algorithms obtain candidate roads by setting up some neighbourhoods (e.g., the buffer or the minimum bounding rectangle), but the neighbourhood scope is difficult to determine objectively and is prone to cause error matching. (2) Topological [6, 7]. The algorithms select candidate roads based on the connectivity among the road network. Unfortunately, they rely heavily on the topological relationship among the roads, resulting in poor applicability of the algorithms. (3) Probabilistic [8, 9, 10]. The algorithms use some static parameters (e.g., GPS coordinates, variance) to establish confidence intervals, and select candidate roads using confidence intervals. However, the threshold setting of this algorithm has great contingency and the setting of confidence intervals is only of statistical significance, which leads to the poor practicability of the algorithm. In particular, it is necessary to note the above three types of methods in the selection of candidate roads were all from the perspective of static map matching, and have not taken into account real-time vehicle speed and other real-time parameters,which cause the size of the candidate region to be fixed, resulting in a large number of redundant calculations. For example, if a vehicle is waiting for a red light at a junction, a fixed candidate area will cause the selection of too many candidate matching roads. Therefore, real-time adjustment of the candidate matching road range is more practical for real-time map matching.
For the second step of identifying the best matching road, approaches for map matching algorithms found in the literature can be categorized into four groups: (1) Direct projection algorithm. This algorithm directly projects the locating point on its nearest road, but it relies too much on GPS positioning accuracy, and when the road condition is complex, it is easy to cause error matching. (2) Curve fitting algorithms [11, 12]. These algorithms select the best matching road by calculating the similarity between the driving path and the candidate road, but the matching effect is not good when the vehicle travels on a parallel road. (3) Advanced map matching algorithms [13, 14, 15, 16, 17]. These algorithms adopt complex mathematical models or the filters to identify the best matching road, but they have complex principles, high complexity, and large computational effort, and are difficult to support the wide application of a real-time matching system. (4) Weights based algorithm [10, 18, 19, 20, 21], the algorithm determines the matching road by setting different weights for two parameters (i.e., the driving direction and the projection distance from the vehicle to the candidate road), however, the traditional weight based algorithm needs a lot of experiments to determine the optimal weight, while the weighted circle algorithm [21] could establish adaptive weights according to the actual situation of the road, so as to overcome the shortcomings of weights based algorithm and further to a better efficiency. For the special case where two consecutive locating points may be at the angle of the intersection, the weighted circle algorithm would set the equal weights for the candidate roads, easily resulting in poor matching results. Meantime, although these algorithms have been devoted to improving the accuracy of map matching, little attention has been paid to improving their efficiencies.
In this context,we will propose a new real-time matching algorithm for vehicle map matching by integrating spatio-temporal proximity and improved weight circle (referred to as STP-IWC). Our main contribution is to improve positioning accuracy and reduce time lag by supplementing new positioning parameters and optimizing calculation process. Firstly,we will develop an STP method which can reduce positioning time by dynamically and adaptively refining the optimal candidate matching roads, and then, we will improve the IWC method to increase positioning accuracy by employing new parameter (i.e., angle similarity) and new weighting method to identify the best matching road. At last,we will conduct some tests to verify the accuracy and timeliness of the algorithm.
3 Method
To respond to the algorithm‘s problems in terms of time lag and low accuracy in real-time map matching for in-vehicle navigation systems, this paper proposes a new algorithm that integrates spatio-temporal proximity and improved weighted circle methods, i.e., STP-IWC algorithm, to refine candidate roads adaptively and identify the best road, so as to improve accuracy and efficiency of real-time map matching. Specifically, in this algorithm, the STP algorithm is firstly designed to construct a dynamic three-dimensional cone by introducing three spatio-temporal proximity variables, i.e., GPS coordinates, location interval and vehicle speed, ensuring the candidate matching roads can be dynamically selected from the projected two-dimensional plane of the stereoscopic cones, which also makes the candidate region adjust adaptively with the vehicle’s real-time speed. The IWC algorithm then integrates the three parameters (i.e., vehicle driving angle, projection distance from vehicle to candidate road, similarity between road trajectory and real road), to adaptively determine the best matching road. By integrating STP and IWC, real-time map matching could be achieved efficiently and accurately. In addition, it must be noted the premise of the algorithm is that vehicles will always run on roads, so there is no case where the candidate road does not exist. The overall process of the STP-IWC algorithm is shown in Figure 1.
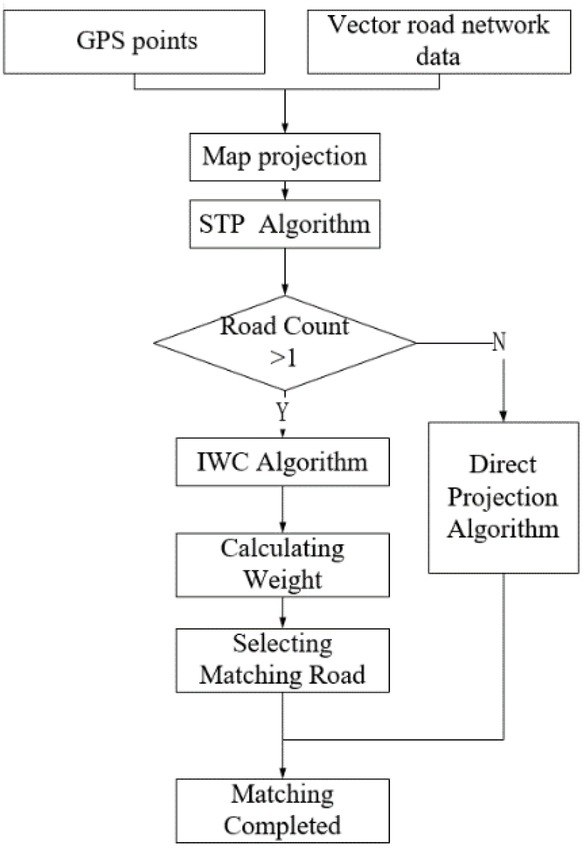
Overall process of STP-IWC algorithm
3.1 Dynamic Selection of Candidate Matching Roads Based on STP Algorithm
Considering the real position of vehicle is not only related to the GPS sampling interval but also to the travel speed of the vehicle, the STP algorithm [22] integrates the vehicle’s travel speed (vi), GPS positioning interval (t) and vehicle’s GPS position coordinates (xi, yi) to adaptively construct a dynamic search region, which can narrow the candidate road search to filter the roads with great matching possibilities. The STP algorithm is as follows.
As shown in Figure 2, as time goes by, GPS produces a series of sampling points pi(ti, xi, yi) (ti denotes time variable, xi and yi are the x- and y- coordinates of the GPS point, respectively, =1,2,3,...,N). Taken pi and pi+1 respectively as the vertices generated at time t and ti+1, the values of t*vi and ti+1*vi+1 respectively as the radius, two different three-dimensional cones are generated respectively at time ti and ti+1. Then, the intersection of the two cones will be an ellipse in a two-dimensional projection coordinate system. In this context, the real-time location of the vehicle at time t (ti < t < ti+1) will exist within the ellipse, and the intersection will exist in case that the following three conditions are met [22]:
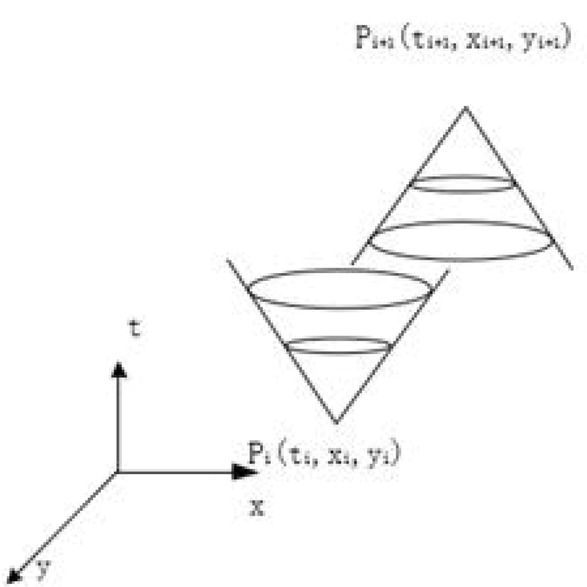
Cones in STP algorithm
Specifically, it may be explained with an appropriate example (Figure 3). Supposing there exist two adjacent GPS points, i.e., p1 (t1, x1, y1) and p2 (t2, x2, y2) (t1 < t < t2), respectively with the speed of v1 and v2. Taken p1 and p2 respectively as the vertices, as well as the values of (t-t1)*v1 and (t2-t)*v2 respectively as the radius, two different three-dimensional cones are generated respectively at times t1 and t2. Then, an ellipse is formed when the projections of these two cones intersect on a two-dimensional plane, and the two focus points of the ellipse is p1(x1, y1) and p2(x2, y2), and the semi-axis is
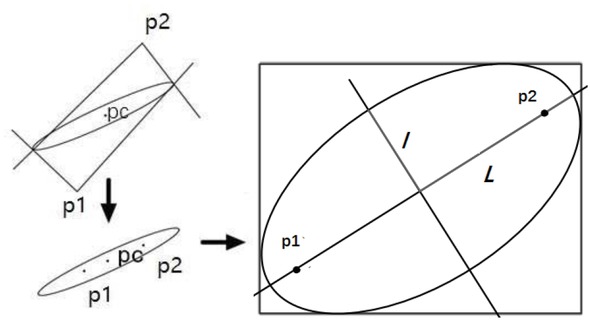
Two-dimensional projected ellipse in STP algorithm
Further, to improve operational efficiency and practicality of the algorithm, we take the minimum bounding rectangle of the elliptic as the search scope for selecting the candidate matching roads. (x1, y1) and (x2, 5y2) are two focal points and df is the distance between them. Let pc (xc, yc) be the mid-point of two focal points, and l and L be major semiaxis and semi-minor axis, respectively, then we set the border of rectangle [X1, X2]× [Y1, Y2]:
If x
Specially, if x1 = x2, then X1 = xc − l, X2 = xc + l, Y1 = yc − L, Y2 = yc + L; if y1 = y2, then L = l.
3.2 Identifying the Best Matching Road Based on IWC Algorithm
After determining the search range of candidate roads, the traditional weighted map matching algorithm uses two parameters: the projection distance (d) from the location point to the candidate matching road, the angle (a) between the driving direction and the candidate matching road, and weights are defined as reference [6] u = Wdd + Waa (Wd and Wa denote the weights of d and a, respectively), then the road with the maximum weight will be selected as the best matching candidate road of the current location point. But these weights need a lot of calculations to determine the optimal ones. Especially, these algorithms cannot find the best matching road in case that two consecutive GPS points are at the corner bisector of the road intersection where the roads’ weights are equal.
3.2.1 A new index to IWC
In view of the above, this paper considers that there will exist a relatively large angle difference among roads when the vehicle stays at a complex intersection, and therefore introduces angle similarity (b) between the vehicle’s travel trajectory and candidate matching roads as a new parameter, and proposes an improved weight circle (IWC) algorithm which adaptively gives weights to three parameters, i.e., the projection distance (d) from the location point to the candidate matching road, the angle (a) between the driving direction and the candidate matching road, and angle similarity (b) between vehicle’s travel trajectory and candidate matching road.
3.2.2 A new method to set weight
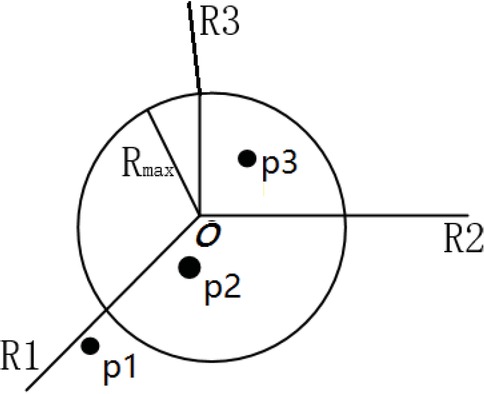
Traditional weight-based algorithms used static values to set the indices’ weights, however, these weights could not adjust adaptively with road conditions. Therefore, these algorithms to set weights lack practical value and do not have enough theoretical foundation. 2In this context, according to the principle that the nearer the location point is to the road intersection, the greater the weight value of the angle between road directions, and the smaller the weight value, we propose an improved weight circle (IWC) algorithm which improved the original weight circle algorithm [21] by adaptively setting weights to overcome the shortcomings of the static weight. The weighted circle is established with the intersection point (O) as the centre and the adaptive radius R as the radius to dynamically set weights.
As shown in Figure 4, around road intersection o, there exist three roads that have been selected as the candidate matching objects by STP algorithm, i.e., R1, R2 and R3,
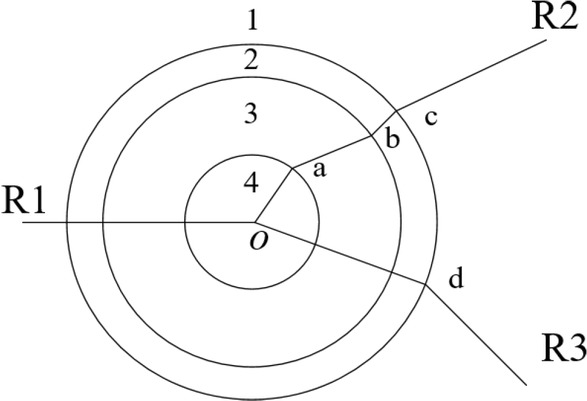
Illustration of weight circle
and a, b, c, d, are four turning points. Then IWC establishes three circles with centre o and three different radii R (i.e., |oa|, |ob|, |oc|, and |oa| are the distance from o to a, and so on), and those circles divide the candidate searching area into four regions, labeled as 1, 2, 3, 4. In practical application, the smaller the distance from vehicle to road intersection (o), the bigger the possibility of the vehicle turning, the bigger the influence of angle on road choice. Therefore, the weight circle defining the weight value of distance (wd) and angle (wa) follows these principles:
Rule 1: If the vehicle is located within region 1, indicating that the vehicle is far from road intersection (o), the influence of index d should be the biggest for the selection of matching road. Therefore, IWC defines that the weight value of distance wd is 1.
Rule 2: If the vehicle is located within regions 2, 3 or 4, IWC defines that the weight value of distance is
Rule 3: If |op| > RMAX, we set |op| = RMAX, where RMAX is the radius of the largest circle.
3.2.3 STP-IWC algorithm
From the above, the specific matching process of using IWC to find best matching road is as follows, also shown in Figure 5:
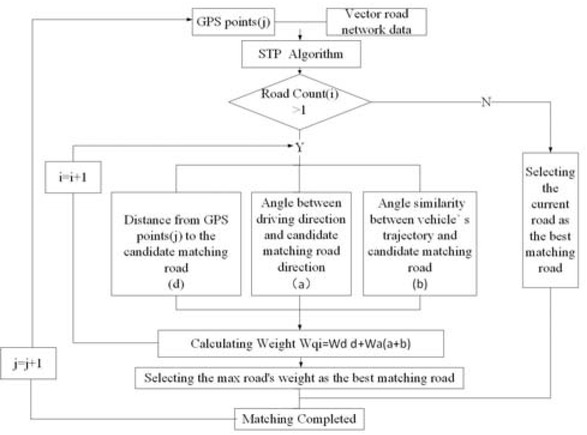
STP-IWC algorithm
First, we introduce STP algorithm to select candidate roads while recording the number of candidate roads.
Then, if there exists only one candidate road selected by the STP algorithm, then this road is considered as the best matching road.
Else, if STP algorithm selects more than one candidate road, then vehicle is considered to be driving on complex roads. In this case, IWC will take the following scenario as an example to illustrate how to determine the best matching candidate road.
Assume that vehicle is driven along R1 (as shown in Figure 6), p1(x1, y1) and p2(x2, y2) are the points that have already been matched, p3(x3, y3) is the point to be matched. The process of using IWC to find the best matching road for p3 is as follows:
A map-matching example of using STP-IWC
First, we calculate distance (op) from p3 to road intersection (o), if op < Rmax, the weight of distance wd is calculated by formula wd = |op|/R, else, wd = 1.
Then,we calculate angle (a) between driving direction and candidate matching road direction, which is defined as follow.
where m is the direction of road, (x2, y2) and (x3, y3) are the coordinates of p2 and p3, respectively, and angle similarity (b) is calculated as follow:
where m is the direction of the road, n is the number of GPS points, i=1,2,3... are consecutive GPS points. For the purpose of improving operating efficiency, we implement three points to calculate the angle similarity.
Finally, we calculate the weight value (wqi) of candidate road i and then select the road with max weight as the best matching road. wqi is defined as follow:
Where,
di is distance from GPS point to candidate matching road i, ai is angle between the vehicle’s driving direction and candidate matching road i, bi is the calculated value of angle similarity (b) between the vehicle’s trajectory and candidate matching roadi.
4 Experiments & Results
To verify timeliness and accuracy of STP-IWC algorithm in this paper, we combine C# programming and ArcGIS Engine 10.2 to design some experiments under Windows 10 operating system to compare the performance and efficiency of this algorithm with the existing direct matching algorithm and curve fitting algorithm. All tests were run on a computer with a 3.3Hz Intel(R) Xeon(R) E3-1226, multithreaded processor and 16G RAM. Meanwhile, we use Android mobile device to derive positioning data and select road in Beijing as the experimental area to carry out the matching experiment. In addition, those points with more than 20m distance to a candidate road are regarded as an error point and are excluded in pre-process due to the positioning error of Android mobile device is 10-15m. Further, GPS positioning interval is 5S and average speed of the vehicle is about 30km/h (8.3m/s), according to the experimental area road width and traffic conditions.
4.1 Experimental results
Figure 7 shows a sample illustration that uses STP-IWC algorithm to match location points at the road junctions. p1 and p2 are the points that have already been matched and p3 is the point to be matched. The STP-IWC algorithm selects R2 as the best matching road of p3, while the traditional weight circle algorithm cannot get the right result when two consecutive GPS points are on the angle bisector of the road intersection. The correctness of the STP-IWC algorithm is verified by the subsequent positioning point p4.
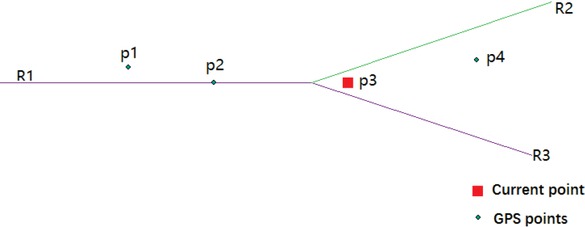
An illustration of identifying the best matching road from STP-IWC
As shown in Figure 8, we selected North Third Ring Road, Haidian District, Beijing City in China as the test section to examine the STP-IWC algorithm. As can be seen from the figure, compared with original GPS data, matched points from STP-IWC does not mismatch at complex intersections, and better reflect the real trajectory, indicating that STP-IWC algorithm still has high precision in the case of complex road conditions.
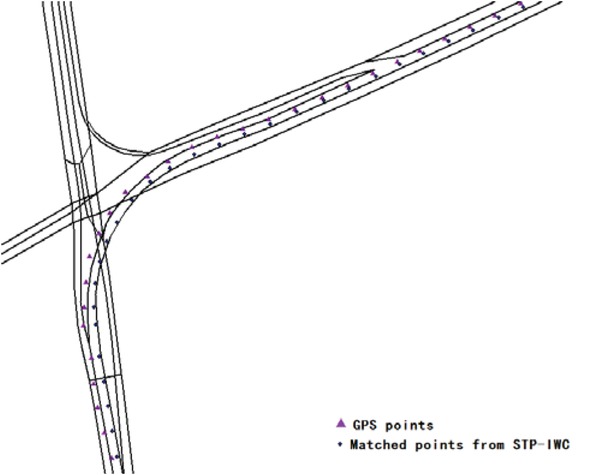
Test case of STP-IWC algorithm
Meanwhile, we have applied our algorithm to real-world cases comparing with other algorithms. Results are shown in Figure 9. The figure shows three matched paths from direct projection algorithm, curve fitting algorithm and STP-IWC algorithm. From the results, it can be seen that, comparing with direct projection algorithm and curve fitting algorithm, STP-IWC algorithm more accurately reflects the driving track.
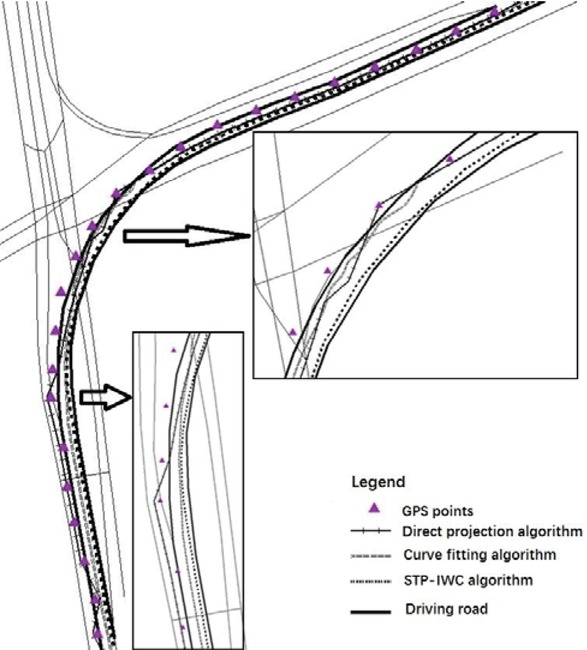
Matching results from different algorithms
4.2 Algorithm Evaluation
4.2.1 Methods to Measure the Quality of Map Matching Algorithm
Among multiple indices to measure the correctness or accuracy of a map matching algorithm on a given trajectory sample in a given road network, we select the most important ones below.
Matching results from different algorithms
| Algorithms | Total number of GPS points | Number of correctly matched GPS points | Average matching time of single point (point/ms) | Length Accuracy (%) | Number Accuracy (%) | F distance (m) |
|---|---|---|---|---|---|---|
| Direct | 258 | 210 | 39.9840 | 72.14 | 81.39 | 323.75 |
| projection | ||||||
| Curve | 258 | 238 | 39.2500 | 92.90 | 92.24 | 508.73 |
| fitting | ||||||
| ST-IWC | 258 | 249 | 39.0654 | 96.67 | 96.51 | 101.63 |
Average time of single point matching: The index reflects the average time used to complete the matching of a location point in the matching process. It can reflect the timeliness of the algorithm in practical applications.
Length accuracy: This index is the ratio of the right matching road length to the actual track length. It can reflect the accuracy of the algorithm in practical applications.
Number accuracy: It is the ratio of the number of correctly matched road sections to the total number of actual track sections. It can reflect the versatility of the algorithm in practical applications. This index works well in the case where the total number of correctly matched segments is considered to be more important than the total length of correctly matched segments, e.g., the algorithm with high matching accuracy in segments’ quantity will be appropriate to be applied to some large urban centres with dense road network.
Fréchet distance: The index is obtained by accumulating the Fréchet distance (F distance) between each driving track road segment and actual driving segment. This value can reflect the similarity between the matched trajectory and the real driving trajectory. The larger the value, the greater the distance between the matching points and the real location points; the lesser the value, the greater the similarity between the matching trajectory and the real trajectory. F distance is defined as follows:
Let two curves f,g:[0,1]→ R2 in F space, the Fréchet distance δF(f,g) is defined as [23, 24]:
Where, ||·|| represents the Euclidean norm and inf represents the lower bound of the set. α, β is a continuous nondecreasing function with respect to the parameter t established after re-parameterization, and α(0) = β(0) = 1, α(1) = β(1) = 1.
4.2.2 Algorithm Comparison
It can be seen from the comparative analysis of the experimental results shown in Figure 10, the map matching algorithm based on STP-IWC matching can not only achieve higher accuracy and stability, but is also superior to the other algorithms in terms of the matching time. From the single-point matching time, the matching time of some points used by other algorithms is too long to show common stability and timeliness.
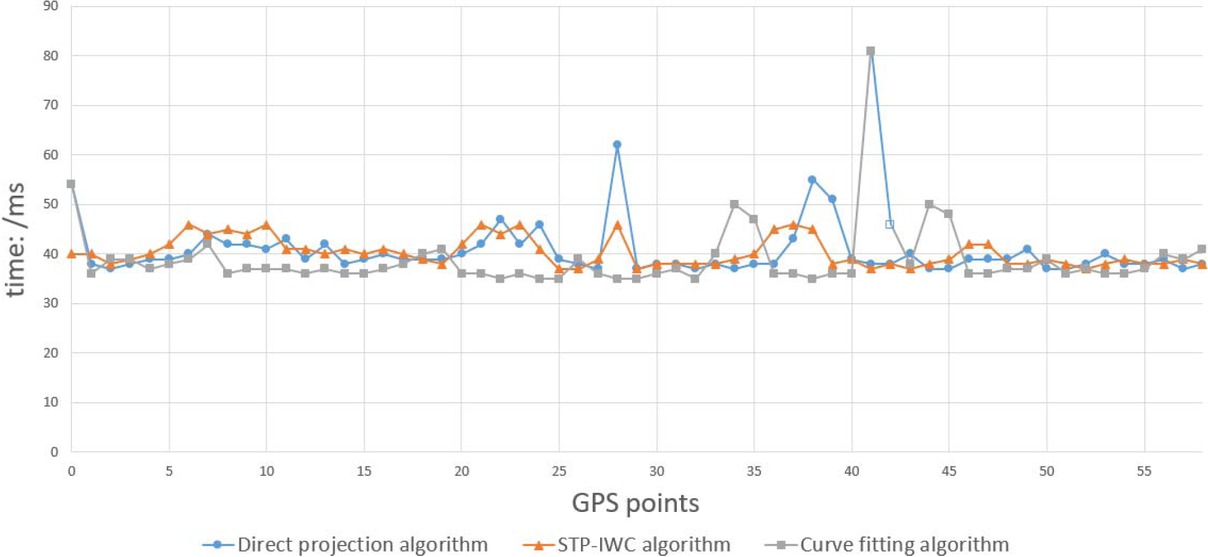
Single-point matching time from different algorithms
To verify the reliability of the algorithm, Jianguomenwai Street, No. 103 National Highway and Beiyuan South
Road in Beijing city (No.2, 3 and 4, as shown in Figure 11) were selected for testing comparing with the above-mentioned experiment (No.1). As shown in Table 2, as the number of matching roads increases in the study area, the integrity and accuracy of the STP-IWC algorithm remains within a certain range, and the accuracy rate of each indicator is still more than 95%, which indicates that the STP-IWC algorithm has good reliability and stability.
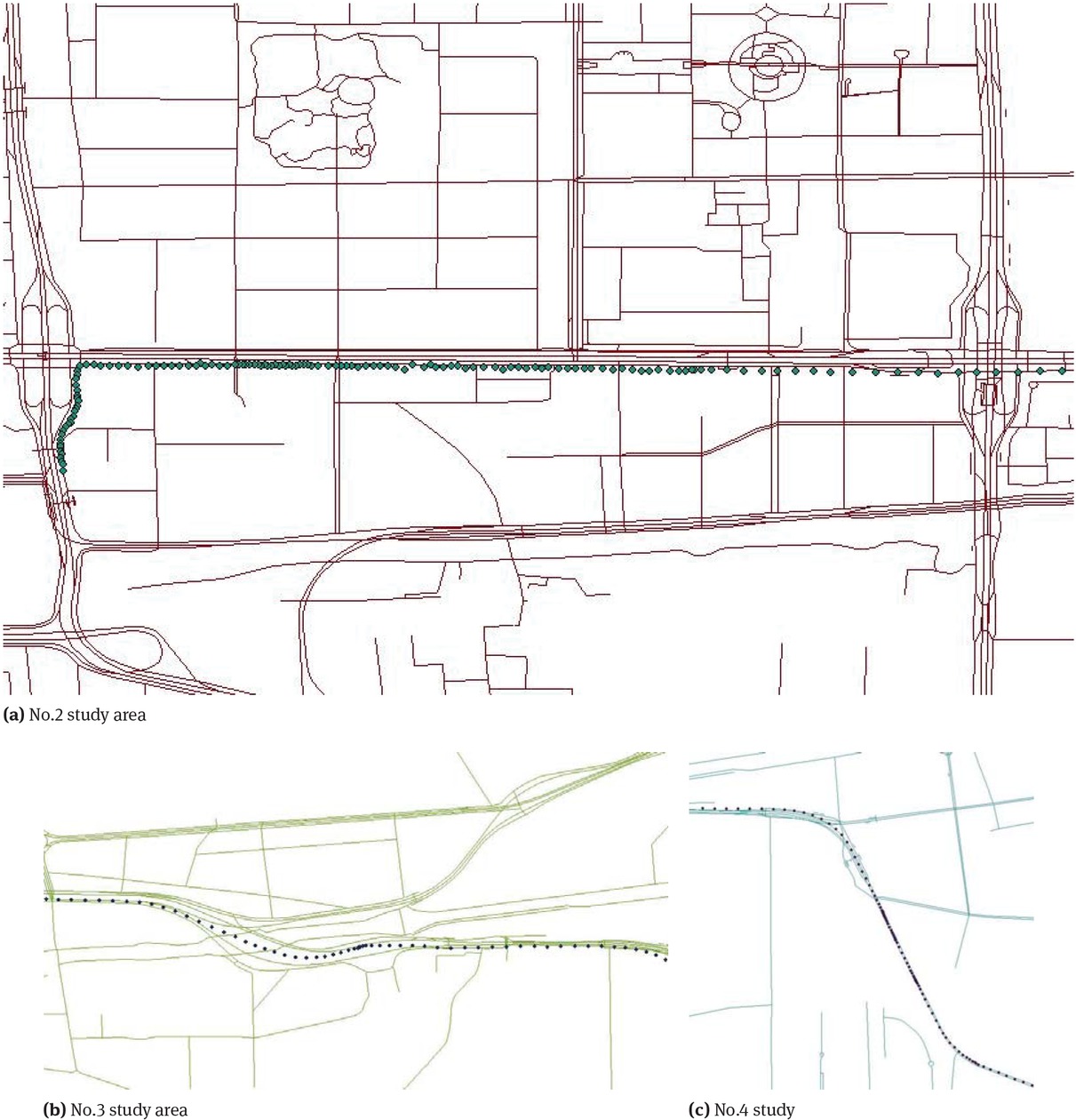
Overview of three study areas
Matching results from multiple areas
| No. | Total number of GPS points | Number of correctly matched GPS points | Length accuracy (%) | Number accuracy (%) | F distance (m) | ||
|---|---|---|---|---|---|---|---|
| 1 | 258 | 249 | 96.67 | 96.51 | 101.63 | ||
| 2 | 150 | 145 | 96.47 | 96.67 | 65.13 | ||
| 3 | 300 | 285 | 97.06 | 95.00 | 110.88 | ||
| 4 | 188 | 179 | 97.32 | 95.45 | 98.51 | ||
5 Conclusion and Discussion
To respond the algorithm’s problems in terms of time lagging and inaccuracy in real-time map matching for in-vehicle navigation systems, this paper proposes a new algorithm called STP-IWC. It designs STP algorithm to improve the efficiency and practicality of selecting candidate roads and proposes IWC algorithm to overcome the inadequacy of the previous algorithms when matching parallel road sections, solving that the traditional weight algorithms need many experiments to determine the optimal weight, and giving the new algorithm much better performance and stability. The case tests show that the matching time of single points used by STP-IWC algorithm is about 40ms and the accuracy of all evaluation indicators exceeds 95% while maintaining the timeliness, much higher than that of the existing algorithms, which demonstrates the feasibility and efficiency of the new algorithm and responds to the requirements of real-time map matching for in-vehicle navigation systems. However, limited by data availability and current experimental conditions, this study mainly focused on two-dimensional road networks, giving little attention to the map matching of three-dimensional road networks such as overpasses, and has not conducted in-depth research on lane-level real-time map matching, which will be our next study interest.
Acknowledgement
The research was supported by the National Key R&D Program of China (2018YFB0505400), National Natural Science Foundation of China (41771157), the Great Wall Scholars Program (CIT&TCD20190328), the Key Research Projects of National Statistical Science of China (2018LZ27), the Research project of Beijing Municipal Education Committee(KM201810028014), Young Yanjing Scholar Project of Capital Normal University and Capacity Building for Sci-Tech Innovation – Fundamental Scientific Research Funds (19530050178).
References
[1] Li, D., Deng, L., Cai, Z., Franks, B., Yao, X. Intelligent Transportation System in Macao Based on Deep Self Coding Learning. IEEE T.Ind.Inform.2018, (14), 3253-3260.10.1109/TII.2018.2810291Search in Google Scholar
[2] Kidd, A.M., D’Antonio A., Monz C., Heaslip K., Taff D., Newman P. A GPS-Based Classification of Visitors’ Vehicular Behavior in A Protected Area Setting. Journal of Park and Recreation Administration.2018, 36(1), 69-89.10.18666/JPRA-2018-V36-I1-8287Search in Google Scholar
[3] Anagnostopoulos, C.N.E., Anagnostopoulos I.E., Loumos V., Kayafas E. A License Plate-Recognition Algorithm for Intelligent Transportation System Applications. IEEE T Intell.Transp.2006, 7(3), 377-392.10.1109/TITS.2006.880641Search in Google Scholar
[4] Pan, C., Zhou, X., Yang C. Study on Mobile Terminals Adaptive Matching Algorithm Basedon Road Bounding Box. Journal of Geomatics 2013, 38(1), 23-26.Search in Google Scholar
[5] Si, Y., Li R., Meng, W. An Improved Road-Matching Algorithm. Journal of Geomatics Science and Technology 2010, 27(6), 438-442.Search in Google Scholar
[6] Velaga, N. R., Quddus, M. A., Bristow, A.L. Developing an Enhanced Weight-Based Topological Map-Matching Algorithm for Intelligent Transport Systems. Transport. Res.C-Emer., 2009, 17(6), 672-683.10.1016/j.trc.2009.05.008Search in Google Scholar
[7] Jiang, G., Li, M., Zhu, Z. Map Matching Algorithm Based on Topological Relations for Urban Bus Intelligent Monitoring System. Microcomputer Information 2009, 25(8), 118-120.Search in Google Scholar
[8] Zhang, J. C., Wang, Y.H., Zhao, W.J. An improved probabilistic relaxation method for matching multi-scale road networks, International Journal of Digital Earth 11:6,2018,635-655.10.1080/17538947.2017.1341557Search in Google Scholar
[9] Yang, Y., Gu, Z., Hu, L., Rong, Z., Luo, G. Map Matching Algorithm for Vehicle Navigation System Based on Probability Decision Rule. Aut.Eng 2006, 28(10), 897-901.Search in Google Scholar
[10] Li, Y., Zhang, X., Bao, Y. Algorithm on Real-Time Map-Matching of Multi-Weight Probability. J. Electr. Measur.Instr 2012, 26(2), 166-170.10.3724/SP.J.1187.2012.00166Search in Google Scholar
[11] Zhou, Y., Cheng, Y. Map-Matching Algorithm Based on Curve-fitting Model. J. Transp. Syst. Eng. Inf. Technol 2004, 4(2), 68-70.Search in Google Scholar
[12] Bi, J., Zhu, Y., Cheng, Y. A Comprehensive Map Matching Algorithm Based on Curve Fitting and Network Topology. Journal of Transport Information & Safety 2014, 32(6), 127-131.Search in Google Scholar
[13] Su, H., Wang, G., Wang, J. Map Matching Algorithm Based on Fuzzy Neural Networks. Journal of University of Science and Technology Beijing 2012, 34(1), 43-47.Search in Google Scholar
[14] Zelenkov, A.V. Calculation of the Parameters of Hidden Markov Models Used in the Navigation Systems of Surface Transportation for Map Matching: A review. Automatic Control and Computer Sciences 2010, 44(6), 309-323.10.3103/S0146411610060015Search in Google Scholar
[15] Song, J., Li, G.Y., Li, N.N, Zhang, Y.N. A Fuzzy-Logic-Based Map Matching Algorithm for the GPS/DR System. Comput. Eng. Sci 2008, 30(10), 30-32.Search in Google Scholar
[16] Li, K., Yang, Y., Qiu, X. An Improved Map Matching Algorithm Based on D-S Evidence Theory in City Vehicle. Navigation.Acta Geodaetica et Cartographica Sinica 2014, 43(2), 208-213.Search in Google Scholar
[17] Xu, H., Liu, H., Tan, C. Development and Application of an Enhanced Kalman Filter and Global Positioning System Error-Correction Approach for Improved Map-Matching. J.Intell. Transport. S. 2010, 14(1), 27-36.10.1080/15472450903386013Search in Google Scholar
[18] Yin, H., Wolfson, O. A Weight-Based Map Matching Method in Moving Objects Databases. In Proceedings of 16th International Conference, Santorini Island, Greese, 23-23, June, 2004, 437-438.Search in Google Scholar
[19] Wang, Y.H., Zhang, Q.S., Guan, H.L. Incrementally Detecting Change Types of Spatial Area Object: A Hierarchical Matching Method Considering Change Process. ISPRS Int. J.Geo-Inf 2018, 7, 42, 1-14.10.3390/ijgi7020042Search in Google Scholar
[20] Hashemi, M., Karimi, H. A Weight-Based Map-Matching Algorithm for Vehicle Navigation in Complex Urban Networks. J. Intell. Transport. S 2016, 20(6), 573-590.10.1080/15472450.2016.1166058Search in Google Scholar
[21] Fang, W., Huang, S. Research and Implementation of GPS/MM Vehicle Navigation System. MicrocomputerInformation 2007, 23(9), 217-225.Search in Google Scholar
[22] Kuijpers B., Moelans B.,Othman, W. Vaisman, A. Uncertainty-Based Map Matching: The Space-Time Prism and k-Shortest Path Algorithm. ISPRS Int. J.Geo-Inf 2016, 5(11), 204, 1-26.10.3390/ijgi5110204Search in Google Scholar
[23] Fréchet, M.M. Sur Quelques Points du Calcul Fonctionnel. Rendiconti del Circolo Matematico diPalermo (1884-1940) 1996, 22(1), 1-72.10.1007/BF03018603Search in Google Scholar
[24] Alt, H., Godau, M. Computing the Fréchet Distance between Two Polygonal Curves. Int.J. Comput. Geome. &Ap 1995, 5(01n02), 75-91.10.1142/S0218195995000064Search in Google Scholar
© 2019 W. Teng and Y.Wang, published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 Public License.
Articles in the same Issue
- Regular Articles
- 2D Seismic Interpretation of the Meyal Area, Northern Potwar Deform Zone, Potwar Basin, Pakistan
- A new method of lithologic identification and distribution characteristics of fine - grained sediments: A case study in southwest of Ordos Basin, China
- Modified Gompertz sigmoidal model removing fine-ending of grain-size distribution
- Diagenesis and its influence on reservoir quality and oil-water relative permeability: A case study in the Yanchang Formation Chang 8 tight sandstone oil reservoir, Ordos Basin, China
- Evaluation of AHRS algorithms for Foot-Mounted Inertial-based Indoor Navigation Systems
- Identification and evaluation of land use vulnerability in a coal mining area under the coupled human-environment
- Hydrocarbon Generation Potential of Chia Gara Formation in Three Selected Wells, Northern Iraq
- Source Analysis of Silicon and Uranium in uranium-rich shale in the Xiuwu Basin, Southern China
- Lithologic heterogeneity of lacustrine shale and its geological significance for shale hydrocarbon-a case study of Zhangjiatan Shale
- Characterization of soil permeability in the former Lake Texcoco, Mexico
- Detrital zircon trace elements from the Mesozoic Jiyuan Basin, central China and its implication on tectonic transition of the Qinling Orogenic Belt
- Turkey OpenStreetMap Dataset - Spatial Analysis of Development and Growth Proxies
- Morphological Changes of the Lower Ping and Chao Phraya Rivers, North and Central Thailand: Flood and Coastal Equilibrium Analyses
- Landscape Transformations in Rapidly Developing Peri-urban Areas of Accra, Ghana: Results of 30 years
- Division of shale sequences and prediction of the favorable shale gas intervals: an example of the Lower Cambrian of Yangtze Region in Xiuwu Basin
- Fractal characteristics of nanopores in lacustrine shales of the Triassic Yanchang Formation, Ordos Basin, NW China
- Selected components of geological structures and numerical modelling of slope stability
- Spatial data quality and uncertainty publication patterns and trends by bibliometric analysis
- Application of microstructure classification for the assessment of the variability of geological-engineering and pore space properties in clay soils
- Shear failure modes and AE characteristics of sandstone and marble fractures
- Ice Age theory: a correspondence between Milutin Milanković and Vojislav Mišković
- Are Serbian tourists worried? The effect of psychological factors on tourists’ behavior based on the perceived risk
- Real-Time Map Matching: A New Algorithm Integrating Spatio-Temporal Proximity and Improved Weighted Circle
- Characteristics and hysteresis of saturated-unsaturated seepage of soil landslides in the Three Gorges Reservoir Area, China
- Petrographical and geophysical investigation of the Ecca Group between Fort Beaufort and Grahamstown, in the Eastern Cape Province, South Africa
- Ecological risk assessment of geohazards in Natural World Heritage Sites: an empirical analysis of Bogda, Tianshan
- Integrated Subsurface Temperature Modeling beneath Mt. Lawu and Mt. Muriah in The Northeast Java Basin, Indonesia
- Go social for your own safety! Review of social networks use on natural disasters – case studies from worldwide
- Forestry Aridity Index in Vojvodina, North Serbia
- Natural Disasters vs Hotel Industry Resilience: An Exploratory Study among Hotel Managers from Europe
- Using Monarch Butterfly Optimization to Solve the Emergency Vehicle Routing Problem with Relief Materials in Sudden Disasters
- Potential influence of meteorological variables on forest fire risk in Serbia during the period 2000-2017
- Controlling factors on the geochemistry of Al-Shuaiba and Al-Mejarma coastal lagoons, Red Sea, Saudi Arabia
- The Influence of Kaolinite - Illite toward mechanical properties of Claystone
- Two critical books in the history of loess investigation: ‘Charakteristik der Felsarten’ by Karl Caesar von Leonhard and ‘Principles of Geology’ by Charles Lyell
- The Mechanism and Control Technology of Strong Strata Behavior in Extra-Thick Coal Seam Mining Influenced by Overlying Coal Pillar
- Shared Aerial Drone Videos — Prospects and Problems for Volunteered Geographic Information Research
- Stable isotopes of C and H in methane fermentation of agriculture substrates at different temperature conditions
- Prediction of Compression and Swelling Index Parameters of Quaternary Sediments from Index Tests at Mersin District
- Detection of old scattered windthrow using low cost resources. The case of Storm Xynthia in the Vosges Mountains, 28 February 2010
- Remediation of Copper and Zinc from wastewater by modified clay in Asir region southwest of Saudi Arabia
- Sedimentary facies of Paleogene lacustrine dolomicrite and implications for petroleum reservoirs in the southern Qianjiang Depression, China
- Correlation between ore particle flow pattern and velocity field through multiple drawpoints under the influence of a flexible barrier
- Atmospheric refractivity estimation from AIS signal power using the quantum-behaved particle swarm optimization algorithm
- A geophysical and hydro physico-chemical study of the contaminant impact of a solid waste landfill (swl) in King Williams’ Town, Eastern Cape, South Africa
- Landscape characterization using photographs from crowdsourced platforms: content analysis of social media photographs
- A Study on Transient Electromagnetic Interpretation Method Based on the Seismic Wave Impedance Inversion Model
- Stratigraphy of Architectural Elements of a Buried Monogenetic Volcanic System
- Variable secondary porosity modeling of carbonate rocks based on μ-CT images
- Traditional versus modern settlement on torrential alluvial fans considering the danger of debris flows: a case study of the Upper Sava Valley (NW Slovenia)
- The Influence of Gangue Particle size and Gangue Feeding Rate on Safety and Service Life of the Suspended Buffer’s Spring
- Research on the Transition Section Length of the Mixed Workface Using Gangue Backfilling Method and Caving Method
- Rainfall erosivity and extreme precipitation in the Pannonian basin
- Structure of the Sediment and Crust in the Northeast North China Craton from Improved Sequential H-k Stacking Method
- Planning Activities Improvements Responding Local Interests Change through Participatory Approach
- GIS-based landslide susceptibility mapping using bivariate statistical methods in North-western Tunisia
- Uncertainty based multi-step seismic analysis for near-surface imaging
- Deformation monitoring and prediction for residential areas in the Panji mining area based on an InSAR time series analysis and the GM-SVR model
- Statistical and expert-based landslide susceptibility modeling on a national scale applied to North Macedonia
- Natural hazards and their impact on rural settlements in NE Romania – A cartographical approach
- Rock fracture initiation and propagation by mechanical and hydraulic impact
- Influence of Rapid Transit on Accessibility Pattern and Economic Linkage at Urban Agglomeration Scale in China
- Near Infrared Spectroscopic Study of Trioctahedral Chlorites and Its Remote Sensing Application
- Problems with collapsible soils: Particle types and inter-particle bonding
- Unification of data from various seismic catalogues to study seismic activity in the Carpathians Mountain arc
- Quality assessment of DEM derived from topographic maps for geomorphometric purposes
- Remote Sensing Monitoring of Soil Moisture in the Daliuta Coal Mine Based on SPOT 5/6 and Worldview-2
- Utilizing Maximum Entropy Spectral Analysis (MESA) to identify Milankovitch cycles in Lower Member of Miocene Zhujiang Formation in north slope of Baiyun Sag, Pearl River Mouth Basin, South China Sea
- Stability Analysis of a Slurry Trench in Cohesive-Frictional Soils
- Integrating Landsat 7 and 8 data to improve basalt formation classification: A case study at Buon Ma Thuot region, Central Highland, Vietnam
- Assessment of the hydrocarbon potentiality of the Late Jurassic formations of NW Iraq: A case study based on TOC and Rock-Eval pyrolysis in selected oil-wells
- Rare earth element geochemistry of sediments from the southern Okinawa Trough since 3 ka: Implications for river-sea processes and sediment source
- Effect of gas adsorption-induced pore radius and effective stress on shale gas permeability in slip flow: New Insights
- Development of the Narva-Jõesuu beach, mineral composition of beach deposits and destruction of the pier, southeastern coast of the Gulf of Finland
- Selecting fracturing interval for the exploitation of tight oil reservoirs from logs: a case study
- A comprehensive scheme for lithological mapping using Sentinel-2A and ASTER GDEM in weathered and vegetated coastal zone, Southern China
- Sedimentary model of K-Successions Sandstones in H21 Area of Huizhou Depression, Pearl River Mouth Basin, South China Sea
- A non-uniform dip slip formula to calculate the coseismic deformation: Case study of Tohoku Mw9.0 Earthquake
- Decision trees in environmental justice research — a case study on the floods of 2001 and 2010 in Hungary
- The Impacts of Climate Change on Maximum Daily Discharge in the Payab Jamash Watershed, Iran
- Mass tourism in protected areas – underestimated threat? Polish National Parks case study
- Decadal variations of total organic carbon production in the inner-shelf of the South China Sea and East China Sea
- Hydrogeothermal potentials of Rogozna mountain and possibility of their valorization
- Postglacial talus slope development imaged by the ERT method: comparison of slopes from SW Spitsbergen, Norway and Tatra Mountains, Poland
- Seismotectonics of Malatya Fault, Eastern Turkey
- Investigating of soil features and landslide risk in Western-Atakent (İstanbul) using resistivity, MASW, Microtremor and boreholes methods
- Assessment of Aquifer Vulnerability Using Integrated Geophysical Approach in Weathered Terrains of South China
- An integrated analysis of mineralogical and microstructural characteristics and petrophysical properties of carbonate rocks in the lower Indus Basin, Pakistan
- Applicability of Hydrological Models for Flash Flood Simulation in Small Catchments of Hilly Area in China
- Heterogeneity analysis of shale reservoir based on multi-stage pumping data
Articles in the same Issue
- Regular Articles
- 2D Seismic Interpretation of the Meyal Area, Northern Potwar Deform Zone, Potwar Basin, Pakistan
- A new method of lithologic identification and distribution characteristics of fine - grained sediments: A case study in southwest of Ordos Basin, China
- Modified Gompertz sigmoidal model removing fine-ending of grain-size distribution
- Diagenesis and its influence on reservoir quality and oil-water relative permeability: A case study in the Yanchang Formation Chang 8 tight sandstone oil reservoir, Ordos Basin, China
- Evaluation of AHRS algorithms for Foot-Mounted Inertial-based Indoor Navigation Systems
- Identification and evaluation of land use vulnerability in a coal mining area under the coupled human-environment
- Hydrocarbon Generation Potential of Chia Gara Formation in Three Selected Wells, Northern Iraq
- Source Analysis of Silicon and Uranium in uranium-rich shale in the Xiuwu Basin, Southern China
- Lithologic heterogeneity of lacustrine shale and its geological significance for shale hydrocarbon-a case study of Zhangjiatan Shale
- Characterization of soil permeability in the former Lake Texcoco, Mexico
- Detrital zircon trace elements from the Mesozoic Jiyuan Basin, central China and its implication on tectonic transition of the Qinling Orogenic Belt
- Turkey OpenStreetMap Dataset - Spatial Analysis of Development and Growth Proxies
- Morphological Changes of the Lower Ping and Chao Phraya Rivers, North and Central Thailand: Flood and Coastal Equilibrium Analyses
- Landscape Transformations in Rapidly Developing Peri-urban Areas of Accra, Ghana: Results of 30 years
- Division of shale sequences and prediction of the favorable shale gas intervals: an example of the Lower Cambrian of Yangtze Region in Xiuwu Basin
- Fractal characteristics of nanopores in lacustrine shales of the Triassic Yanchang Formation, Ordos Basin, NW China
- Selected components of geological structures and numerical modelling of slope stability
- Spatial data quality and uncertainty publication patterns and trends by bibliometric analysis
- Application of microstructure classification for the assessment of the variability of geological-engineering and pore space properties in clay soils
- Shear failure modes and AE characteristics of sandstone and marble fractures
- Ice Age theory: a correspondence between Milutin Milanković and Vojislav Mišković
- Are Serbian tourists worried? The effect of psychological factors on tourists’ behavior based on the perceived risk
- Real-Time Map Matching: A New Algorithm Integrating Spatio-Temporal Proximity and Improved Weighted Circle
- Characteristics and hysteresis of saturated-unsaturated seepage of soil landslides in the Three Gorges Reservoir Area, China
- Petrographical and geophysical investigation of the Ecca Group between Fort Beaufort and Grahamstown, in the Eastern Cape Province, South Africa
- Ecological risk assessment of geohazards in Natural World Heritage Sites: an empirical analysis of Bogda, Tianshan
- Integrated Subsurface Temperature Modeling beneath Mt. Lawu and Mt. Muriah in The Northeast Java Basin, Indonesia
- Go social for your own safety! Review of social networks use on natural disasters – case studies from worldwide
- Forestry Aridity Index in Vojvodina, North Serbia
- Natural Disasters vs Hotel Industry Resilience: An Exploratory Study among Hotel Managers from Europe
- Using Monarch Butterfly Optimization to Solve the Emergency Vehicle Routing Problem with Relief Materials in Sudden Disasters
- Potential influence of meteorological variables on forest fire risk in Serbia during the period 2000-2017
- Controlling factors on the geochemistry of Al-Shuaiba and Al-Mejarma coastal lagoons, Red Sea, Saudi Arabia
- The Influence of Kaolinite - Illite toward mechanical properties of Claystone
- Two critical books in the history of loess investigation: ‘Charakteristik der Felsarten’ by Karl Caesar von Leonhard and ‘Principles of Geology’ by Charles Lyell
- The Mechanism and Control Technology of Strong Strata Behavior in Extra-Thick Coal Seam Mining Influenced by Overlying Coal Pillar
- Shared Aerial Drone Videos — Prospects and Problems for Volunteered Geographic Information Research
- Stable isotopes of C and H in methane fermentation of agriculture substrates at different temperature conditions
- Prediction of Compression and Swelling Index Parameters of Quaternary Sediments from Index Tests at Mersin District
- Detection of old scattered windthrow using low cost resources. The case of Storm Xynthia in the Vosges Mountains, 28 February 2010
- Remediation of Copper and Zinc from wastewater by modified clay in Asir region southwest of Saudi Arabia
- Sedimentary facies of Paleogene lacustrine dolomicrite and implications for petroleum reservoirs in the southern Qianjiang Depression, China
- Correlation between ore particle flow pattern and velocity field through multiple drawpoints under the influence of a flexible barrier
- Atmospheric refractivity estimation from AIS signal power using the quantum-behaved particle swarm optimization algorithm
- A geophysical and hydro physico-chemical study of the contaminant impact of a solid waste landfill (swl) in King Williams’ Town, Eastern Cape, South Africa
- Landscape characterization using photographs from crowdsourced platforms: content analysis of social media photographs
- A Study on Transient Electromagnetic Interpretation Method Based on the Seismic Wave Impedance Inversion Model
- Stratigraphy of Architectural Elements of a Buried Monogenetic Volcanic System
- Variable secondary porosity modeling of carbonate rocks based on μ-CT images
- Traditional versus modern settlement on torrential alluvial fans considering the danger of debris flows: a case study of the Upper Sava Valley (NW Slovenia)
- The Influence of Gangue Particle size and Gangue Feeding Rate on Safety and Service Life of the Suspended Buffer’s Spring
- Research on the Transition Section Length of the Mixed Workface Using Gangue Backfilling Method and Caving Method
- Rainfall erosivity and extreme precipitation in the Pannonian basin
- Structure of the Sediment and Crust in the Northeast North China Craton from Improved Sequential H-k Stacking Method
- Planning Activities Improvements Responding Local Interests Change through Participatory Approach
- GIS-based landslide susceptibility mapping using bivariate statistical methods in North-western Tunisia
- Uncertainty based multi-step seismic analysis for near-surface imaging
- Deformation monitoring and prediction for residential areas in the Panji mining area based on an InSAR time series analysis and the GM-SVR model
- Statistical and expert-based landslide susceptibility modeling on a national scale applied to North Macedonia
- Natural hazards and their impact on rural settlements in NE Romania – A cartographical approach
- Rock fracture initiation and propagation by mechanical and hydraulic impact
- Influence of Rapid Transit on Accessibility Pattern and Economic Linkage at Urban Agglomeration Scale in China
- Near Infrared Spectroscopic Study of Trioctahedral Chlorites and Its Remote Sensing Application
- Problems with collapsible soils: Particle types and inter-particle bonding
- Unification of data from various seismic catalogues to study seismic activity in the Carpathians Mountain arc
- Quality assessment of DEM derived from topographic maps for geomorphometric purposes
- Remote Sensing Monitoring of Soil Moisture in the Daliuta Coal Mine Based on SPOT 5/6 and Worldview-2
- Utilizing Maximum Entropy Spectral Analysis (MESA) to identify Milankovitch cycles in Lower Member of Miocene Zhujiang Formation in north slope of Baiyun Sag, Pearl River Mouth Basin, South China Sea
- Stability Analysis of a Slurry Trench in Cohesive-Frictional Soils
- Integrating Landsat 7 and 8 data to improve basalt formation classification: A case study at Buon Ma Thuot region, Central Highland, Vietnam
- Assessment of the hydrocarbon potentiality of the Late Jurassic formations of NW Iraq: A case study based on TOC and Rock-Eval pyrolysis in selected oil-wells
- Rare earth element geochemistry of sediments from the southern Okinawa Trough since 3 ka: Implications for river-sea processes and sediment source
- Effect of gas adsorption-induced pore radius and effective stress on shale gas permeability in slip flow: New Insights
- Development of the Narva-Jõesuu beach, mineral composition of beach deposits and destruction of the pier, southeastern coast of the Gulf of Finland
- Selecting fracturing interval for the exploitation of tight oil reservoirs from logs: a case study
- A comprehensive scheme for lithological mapping using Sentinel-2A and ASTER GDEM in weathered and vegetated coastal zone, Southern China
- Sedimentary model of K-Successions Sandstones in H21 Area of Huizhou Depression, Pearl River Mouth Basin, South China Sea
- A non-uniform dip slip formula to calculate the coseismic deformation: Case study of Tohoku Mw9.0 Earthquake
- Decision trees in environmental justice research — a case study on the floods of 2001 and 2010 in Hungary
- The Impacts of Climate Change on Maximum Daily Discharge in the Payab Jamash Watershed, Iran
- Mass tourism in protected areas – underestimated threat? Polish National Parks case study
- Decadal variations of total organic carbon production in the inner-shelf of the South China Sea and East China Sea
- Hydrogeothermal potentials of Rogozna mountain and possibility of their valorization
- Postglacial talus slope development imaged by the ERT method: comparison of slopes from SW Spitsbergen, Norway and Tatra Mountains, Poland
- Seismotectonics of Malatya Fault, Eastern Turkey
- Investigating of soil features and landslide risk in Western-Atakent (İstanbul) using resistivity, MASW, Microtremor and boreholes methods
- Assessment of Aquifer Vulnerability Using Integrated Geophysical Approach in Weathered Terrains of South China
- An integrated analysis of mineralogical and microstructural characteristics and petrophysical properties of carbonate rocks in the lower Indus Basin, Pakistan
- Applicability of Hydrological Models for Flash Flood Simulation in Small Catchments of Hilly Area in China
- Heterogeneity analysis of shale reservoir based on multi-stage pumping data