Geometric nonlinear analysis based on the generalized displacement control method and orthogonal iteration
-
Ling Li


Abstract
In response to the shortcomings of insufficient efficiency in calculating geometric nonlinear features and high environmental impact in the current construction, this study explores the control of nonlinear geometric structures based on an updated Lagrangian model function in the construction. In this method, the change in the geometric nonlinear stiffness is analyzed using generalized stiffness parameters and a displacement increment method, and the iteration step size and loading/unloading directions are adjusted in the iteration process to achieve the convergence of the solution. In the simulation experiment, the proposed method took 126 s to calculate the incremental iteration steps 700 times in a conventional environment, which is 28.8% more efficient than the cross-sectional method. In the simulated disaster environment, the model took 1,615 s to calculate the ultimate load of 84 contact elements, which is 43.1% more efficient than the section method and 62.6% more efficient than the discrete analysis method. Experimental results showed that the displacement judgment calculation efficiency of the method proposed in this study is higher than that of other models under different loading and unloading conditions and even in geological disaster states. This method had high environmental adaptability in solving nonlinear building structures and could improve the efficiency of solving general nonlinear building results.
1 Introduction
With the advancement of building materials, equipment, and technological processes, the structural design of modern buildings is increasingly demonstrating flexible characteristics. Although the development of flexible structures in modern architecture has improved the environmental adaptability and natural disaster resistance of buildings, geometric nonlinearity issues such as deflection and curvature involved in flexible structures cannot be ignored [1]. The geometric and load parameters of buildings have a significant impact on flexible structures, making it difficult to control the deformation, fracture, and other behaviors of flexible buildings [2]. The solution of geometric nonlinear problems in flexible buildings is beneficial for optimizing the prefabrication and assembly methods of building structures. While reducing the labor costs and improving the construction efficiency, it can also shorten the construction project cycle. The application of geometric nonlinear problems in architecture is highly in line with the current market demand for resource conservation and environmental sustainability and therefore has broad application prospects. In architectural structural design, geometric nonlinear analysis can more accurately predict the actual behavior of the structure under load. Due to the complex geometric shapes and connection methods of building structures, traditional linear analysis may not accurately reflect the actual response of the structure. The method proposed in the study can simulate the buckling and instability phenomena of structures under large deformations through numerical analysis of flexible structures, which is crucial for ensuring the safety of the structure. The contribution of the research lies in improving the efficiency of displacement increment calculations by introducing orthogonal constraints, thereby providing a high-precision and efficient analysis method for the geometric nonlinearity of current flexible structures.
Due to the promising market prospects of geometric nonlinear structures, academic fields and research projects have long been of interest. Touzé et al. proposed a geometric nonlinear structural model reduction method based on an invariant manifold theory, emphasizing the difference between nonlinear mapping and linear techniques. On the basis of discussing the discretization of the finite element method and the implicit condensation technique, recent developments allowing direct computation of reduced-order models relying on invariant manifolds theory are detailed [3]. Deng et al. proposed a new geometrically nonlinear planar beam element. The proposed method was based on the corotation process and stability function, using the same direction rotation program method and differential method to handle displacement transformation and establishing the overall balance equation and tangent stiffness matrix. This method had been proven to have accuracy and efficiency in instance verification [4]. Ma et al. introduced the latest progress of nonlinear electromagnetic response in detecting and controlling quantum phases based on material classification methods using quantum geometry and topological properties and analyzed the application of this method in device architecture [5]. Xu et al. investigated the influence of geometric nonlinearity on large-span bridge structures and analyzed the coupled vibration response of wind turbines and bridges using a full process iterative calculation method. When the train speed was 200 km/h and the wind speed was greater than 35 m/s, the wheel unloading index exceeded the safety threshold [6]. Zhao et al. used a shooting method to solve the nonlinear control equations of gradient shallow spherical shells, thereby obtaining the influence of geometric parameters, material properties, and other parameters on shell buckling and critical load. In experiments, this method provided numerical values and curves to assist in the design of nonlinear structures [7]. Wen et al. reviewed three types of methods for material nonlinearity, geometric nonlinearity, and boundary nonlinearity and explored their numerical accuracy, computational efficiency, and nonlinear dynamics problems in nonlinear continuum topology optimization [8].
Huang et al. conducted nonlinear modal analysis on axially functionally graded truncated cone microscale tubes to improve the vibration response of the microstructure. In the experiment, the influence of material combination changes on the frequency was analyzed through the homotopy perturbation method and the generalized differential quadrature method [9]. Yang et al. improved the prediction accuracy of interpretable neural networks by using orthogonal constraints and performed parameter estimation through an improved small batch gradient descent method. In the experiment, this method improved the interpretability of the model while also making the predictive performance comparable to those of multiple benchmark models [10]. Wu et al. proposed an orthogonal constrained least squares regression model for preserving more discriminative information in feature selection. This method could effectively reduce the feature dimension and improve the classification performance [11]. Maghami and Schillinger proposed an improved truncation error criterion for incremental iterative path tracking step size adaptation in large deformation structural mechanics problems by calculating scalar stiffness parameters. In the experiment, the number of points in the incremental iteration path of the model was significantly reduced, improving the efficiency [12]. Jouneghani and Haghollahi analyzed the seismic requirements and bearing capacity of elliptical braced moment resisting frames using an incremental iteration method and determined the ductility and response correction factors of modern steel braced structural systems. The response correction factors of 9.5 and 6.5 were applicable to the performance of the structural system under different stress states [13].
In summary, in the current research on geometric nonlinearity of building structures, most methods are based on finite element analysis. In the application of finite element analysis, the Lagrangian formulation and the section method occupy the majority. However, the cross-sectional method and the single Lagrangian formulation have the characteristics of high computational complexity and complexity. Therefore, to optimize the numerical calculation methods in flexible structural engineering, the study uses orthogonal constraint conditions to optimize the incremental iteration method based on generalized displacement control (GDC). The purpose of this study is to improve the applicability and efficiency of existing numerical analysis methods for flexible structures in dealing with complex structures. This research contributes to improving the accuracy of solving current geometric nonlinear structures and enhancing the computational efficiency. The innovation of the research lies in the use of updated Lagrangian equations to construct stiffness matrices and the adoption of GDC methods to calculate increments.
2 Methods
Aiming at solving the parameter sensitivity problem for the geometric nonlinear characteristics of flexible structures, a displacement control method based on incremental iteration is studied. The GDC method is applied and combined with orthogonal constraint conditions to optimize the calculation method. In the incremental iteration method, the N + 1-dimensional method is used to determine the load increment coefficient and the displacement increment of the structural unit.
2.1 GDC method for nonlinear geometric elements
In nonlinear analysis, incremental theory is used to gradually solve the response of structures under nonlinear forces (such as material nonlinearity, geometric nonlinearity, etc.). When applying the incremental theory for nonlinear analysis, it is necessary to decompose the loading process of the structure into multiple equilibrium states for step-by-step analysis, as shown in Figure 1.
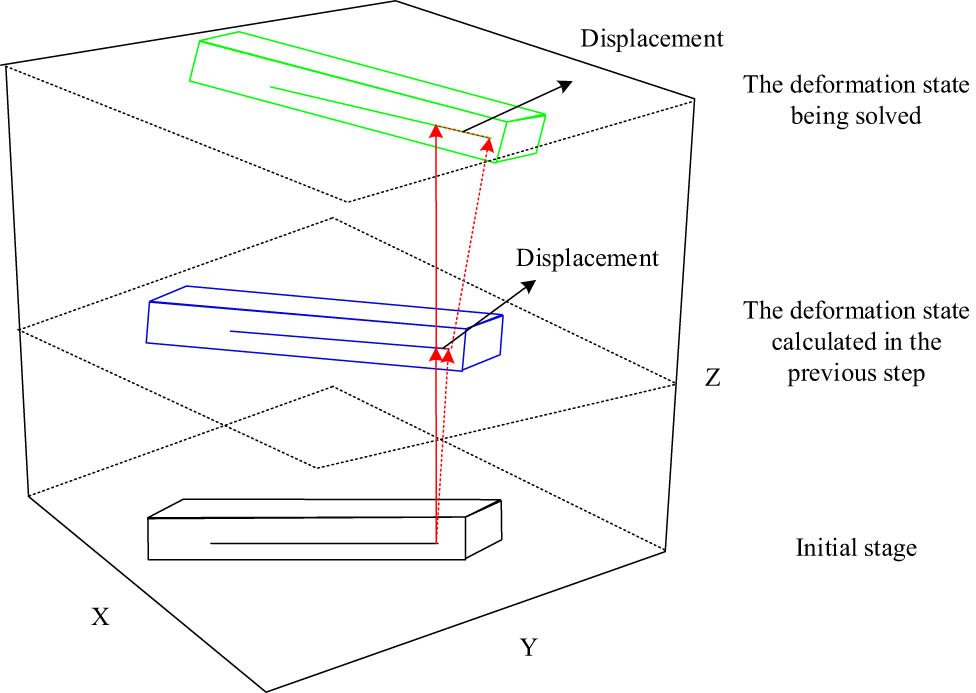
Deformation of building structural units in three-dimensional space.
As shown in Figure 1, the loading process is usually divided into three stages: the initial state, the deformation state calculated in the previous step, and the deformation state currently being solved. The initial state and the deformation state calculated in the previous step are known as equilibrium states, and a new equilibrium state is solved by analyzing the known equilibrium states [14]. Incremental stiffness can be calculated from the four parameters of structural displacement, elastic stiffness, geometric stiffness, and the force that generates displacement. The state changes of non-linear geometric structures are decomposed into linear problems through incremental stiffness, and the convergence of calculation errors is achieved through iterative increments. In the linear iteration process, the incremental equilibrium equation is expressed as:
In Eq. (1), i represents the number of incremental steps;
In Eq. (2),
According to the structural incremental equilibrium equation of Eq. (2), N equilibrium equations can be constructed, but there are N + 1 unknowns in the equations, namely N unknown displacement quantities and one load increment coefficient. Due to the presence of more unknowns than equations, an additional constraint equation needs to be introduced to solve this problem. The general form of the constraint equation is expressed as:
In Eq. (4),
In order for the iterative algorithm to converge to the correct solution, the constraint equation needs to satisfy the stability and boundedness conditions. To ensure the boundedness of load increment parameters and displacement increments, the determinant of the generalized stiffness matrix must be non-zero to avoid mathematical singularities. The expression for the determinant of the generalized stiffness matrix is shown in the following equation:
In Eq. (6),
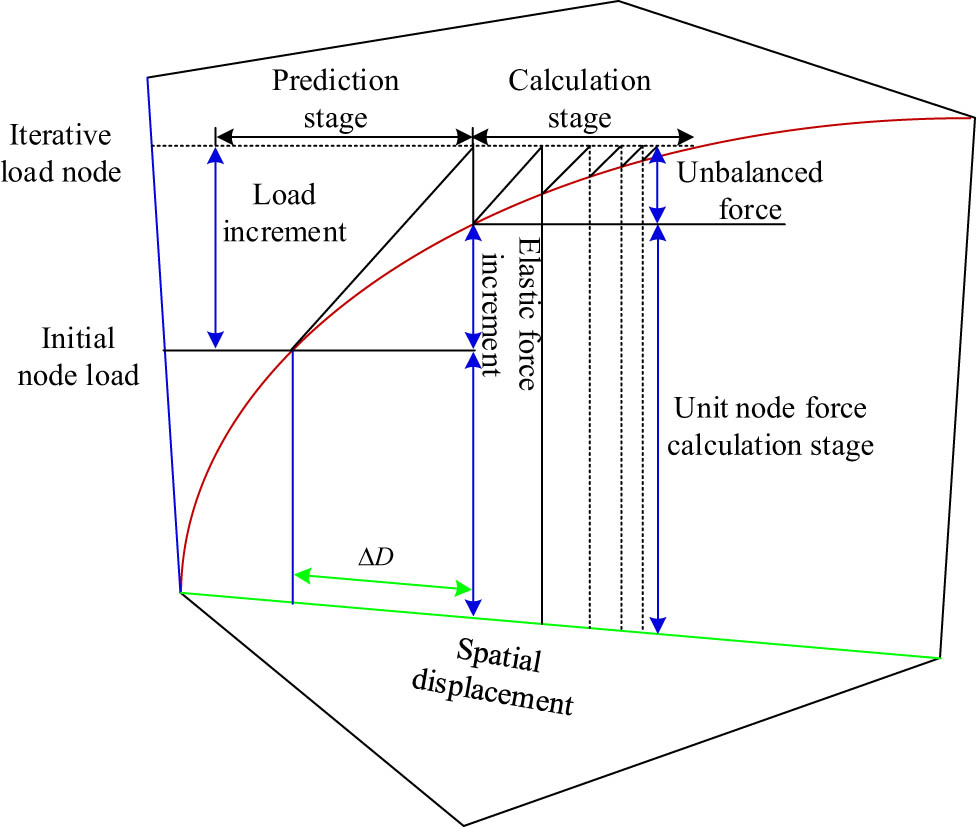
In the conventional incremental iteration method, it mainly includes the prediction stage that affects the speed and efficiency of algorithm convergence, as well as the calculation stage that directly determines whether the algorithm can converge to the exact solution, as shown in Figure 2.
Incremental iterative calculation model.
In Figure 2, when conducting nonlinear structural analysis, the incremental iterative calculation method needs to meet the requirement of automatically adjusting the step size to adapt to changes in structural stiffness [15]. Meanwhile, it is necessary to ensure stable calculation in areas where extreme values or rebound may occur. Therefore, the GDC method is introduced on the basis of incremental iterative calculation. The method uses the generalized stiffness parameter (GSP) to determine the size of the load increment and adjusts the iteration step size and loading/unloading directions in the iterative process to achieve the convergence of the solution [16]. Compared to other methods, it has advantages in dealing with complex nonlinear problems, dynamic problems, and material nonlinear problems with multiple critical points.
In the GDC method, the constraint parameters
From Eq. (8), the calculation equation for the load increment coefficient can be simplified as:
In Eq. (9),
When the number of iterations is greater than or equal to 2, the constraint Eq. (8) can be simplified into the following equation:
From Eq. (10), it can be seen that in the GDC iterative algorithm, the vector generated in the previous iteration is orthogonal to the vector generated in the current iteration. Therefore, the application of GSP can be used to ensure that the calculation of displacement changes of structures under load is carried out along new and unexplored directions, to avoid getting stuck in local minima or overfitting problems.
2.2 Improved GDC method based on orthogonal constraint conditions
The convergence of traditional incremental iteration methods depends on the initial guess value. If the initial conditions are not properly selected, it may lead to divergence or convergence to the wrong solution during the iteration process. Meanwhile, the efficiency and convergence of iterative methods may depend on the size and distribution of load increments. Since the orthogonal relationship between iterative increments has been analyzed in the above equation expression, the study aims to improve the GDC method by analyzing and optimizing the orthogonal constraint conditions. In incremental iteration analysis, the purpose of defining the load increment factor is to provide sufficient known conditions for solving the displacement and load increments in nonlinear equations. In the first iteration, it is assumed that the structure is in equilibrium and there are no unbalanced forces. At this stage, the structure is subjected to external loads, and the resulting displacement increment is calculated based on linear analysis. Starting from the second iteration, the iterative process gradually adjusts and optimizes to eliminate the unbalanced forces in the initial approximate solution, ultimately reaching an equilibrium state that makes the calculation results more accurate and reliable, as shown in Figure 3.
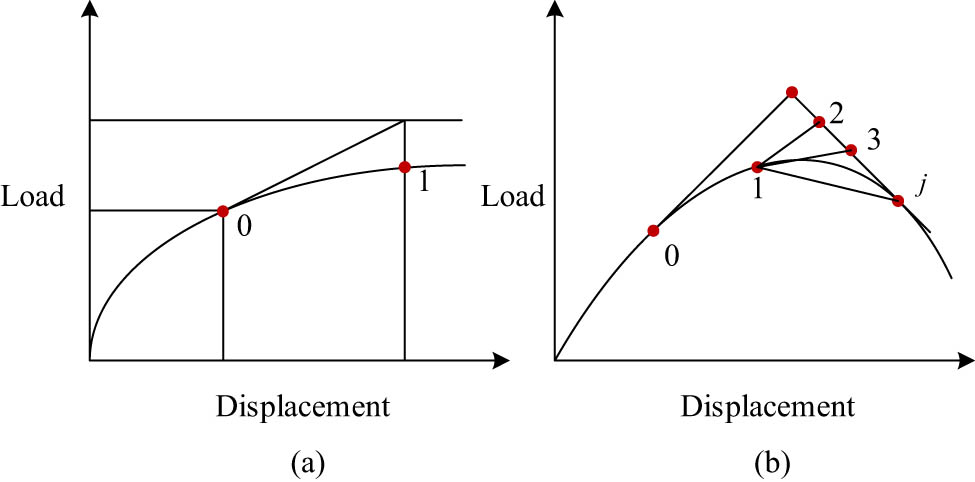
Two-dimensional simplification of traditional (a) incremental iteration and (b) generalized incremental orthogonal iteration.
In Figure 3, 0 represents the initial position, and 1, 2, 3, and
In Eq. (11),
In the first iteration of the incremental iteration method, in addition to determining the numerical value of the load increment coefficient, it is also necessary to determine its positive or negative sign. The current stiffness parameters used may not be sufficient to accurately describe the behavior of the structure near the limit point and rebound point, where special measures need to be taken to ensure the safety and stability of the structure. In practical applications, it is necessary to adjust the stiffness parameters or adopt more complex models to better handle these issues [18]. Therefore, the study introduces additional directional parameters to determine that when the dot product of two displacement increments is positive, the sign of the load increment coefficient is the same as that of the return parameter, as shown in the following equation:
In Eq. (13),
In Eq. (14),
Through this orthogonal iteration, the GDC method can effectively handle nonlinear problems in structural analysis. In structural analysis, a key parameter, the generalized stiffness parameter, is introduced to monitor the stiffness changes of the structure during loading. In the first step of iteration, the GDC method will set a step size limit to ensure the stability of the structure during loading and to determine whether to increase or decrease the load. In the subsequent steps of iteration, the GDC method will set a reference direction vector for the structure. This means that the iterative path of displacement increment will remain perpendicular to the reference direction vector, i.e., orthogonal, to ensure the efficiency and accuracy of the iterative process. Through the above iterative process, the goal of the GDC method is to stabilize and converge the calculation results to the equilibrium state of the structure. The research process is shown in Figure 4.
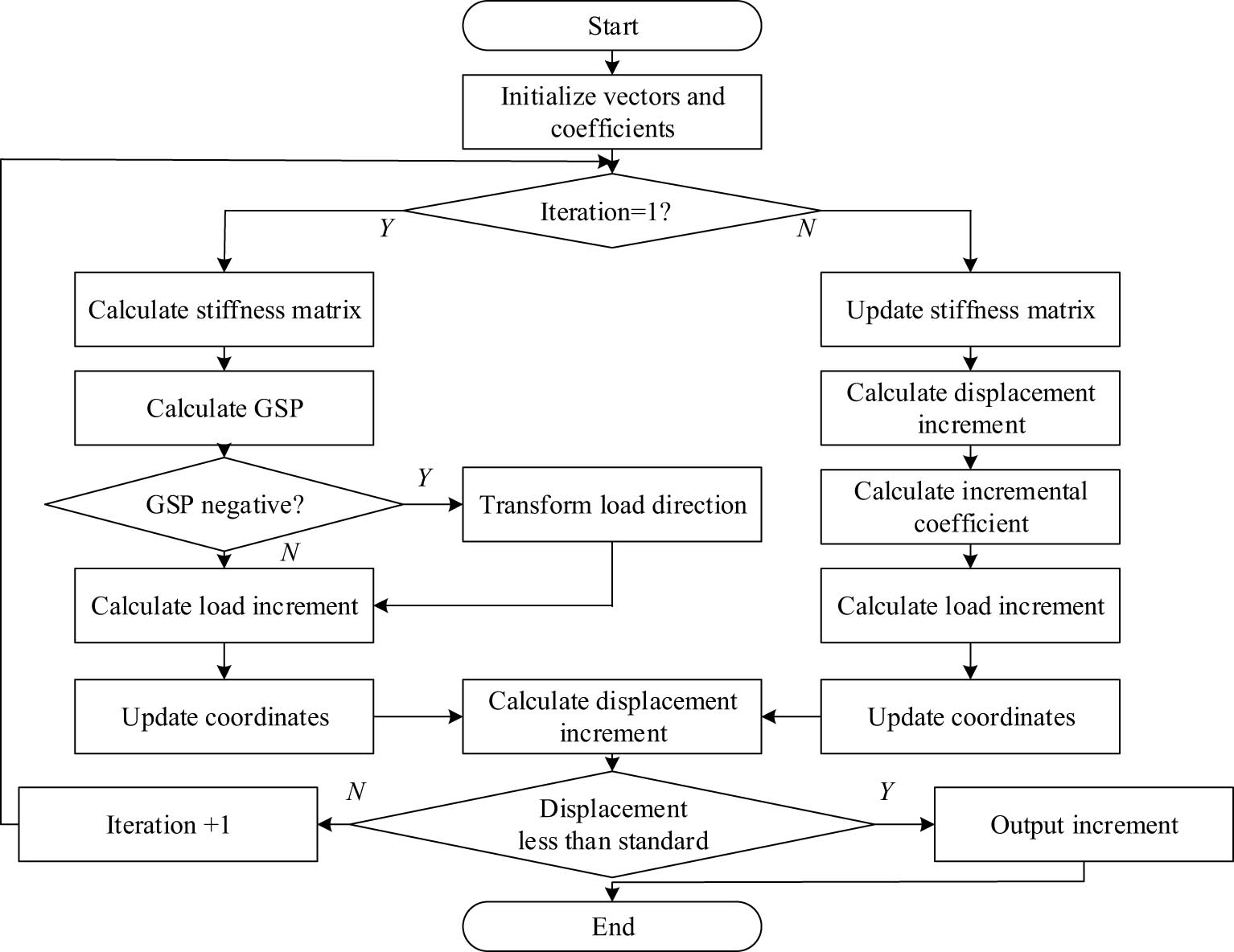
Algorithm flow based on GDC and incremental orthogonal iteration constraints.
In Figure 4, for the geometric nonlinearity problem of flexible structures, the GDC method and orthogonal constraints constructed by the research mainly divide the incremental iteration into two processes: the first iteration and the subsequent iteration.
In the first iteration, the stiffness matrix of the structure is determined and the GSP is calculated, and the positive and negative directions of the load are determined through the first iteration. The stiffness matrix of the second iteration is updated, and the load increment and displacement increment are calculated. Whether the displacement increment is less than the safety standard is judged. If yes, output the displacement increment; otherwise, continue iterative calculation. In the calculation and analysis of building structures, although traditional single displacement control methods are favored for their stability, they appear cumbersome when dealing with structural buckling problems. To ensure computational convergence when dealing with paths with significant curvature, it is usually necessary to set the initial load increment factor very small. In order to expand the application scope of displacement control iteration method, orthogonal constraint conditions are introduced to optimize the calculation process of the structure. By comparing the maximum load increment factor at convergence under different constraint conditions, the efficiency of structural analysis and calculation has been increased.
3 Results
To verify the GDC method under orthogonal constraint optimization constructed by the research method, the adaptability of the method in displacement increment control calculation will be explored from the finite element analysis model of the spatial truss structure, and the algorithm control performance under simulated disaster conditions will be compared.
3.1 Applicability experiment of the orthogonal constraint optimization GDC method
The study uses a hexagonal star-shaped spatial truss structure as the experimental simulation object. When constructing a finite element analysis model using the ANSYS platform, LINK8 elements are used to construct the spatial truss structure, as shown in Figure 5.
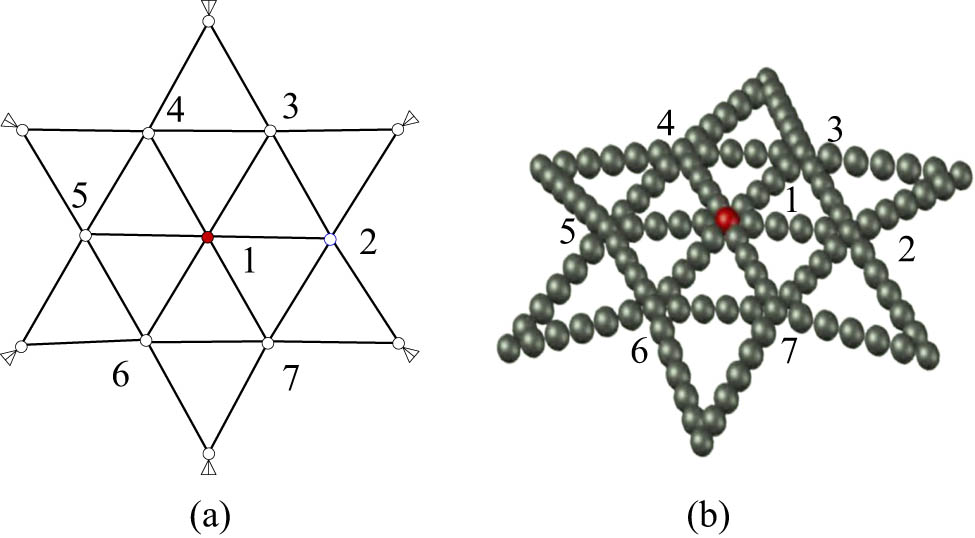
Model diagram and parallel simplification of the truss structure: (a) plan view and (b) discrete model diagram.
In Figure 5, in the finite element model constructed using ANSYS, each member is simplified into a single element for simulation. The contact relationship between each particle is simulated as 132 contact units, of which 48 contact points could rotate but are not allowed to translate at the connection. Additionally, 84 contact points allow for a certain degree of translation and rotation. The specific model parameters are shown in Table 1.
Finite element model parameters of the spatial truss structure
| Project | Value | Project | Value |
|---|---|---|---|
| Initial load of node | 1,000 N | Cross sectional area of the rod | 317 mm2 |
| Initial load increment coefficient | 0.00005 | Torsional moment of inertia | 14,110 mm4 |
| Elastic modulus | 3,030 MPa | Sectional moment of inertia | 8,370 mm4 |
| Shear modulus | 1,262 MPa | Number of rods | 24 |
| Nodes | 13 | — | — |
In the table, the initial load factor is used to determine the incremental step size and loading direction. The incremental step size should be adjusted according to the stiffness change of the structure, and the larger the stiffness, the smaller the incremental step size should be. Therefore, in order to reflect the changes in structural stiffness and adapt to the direction changes of loads beyond the limit point in iterative calculations, this value of 0.00005 is studied as the initial incremental coefficient. First, the load–displacement curve of the model is analyzed in the experiment to verify the rationality of the proposed orthogonal constraint optimization GDC method, as shown in Figure 6.
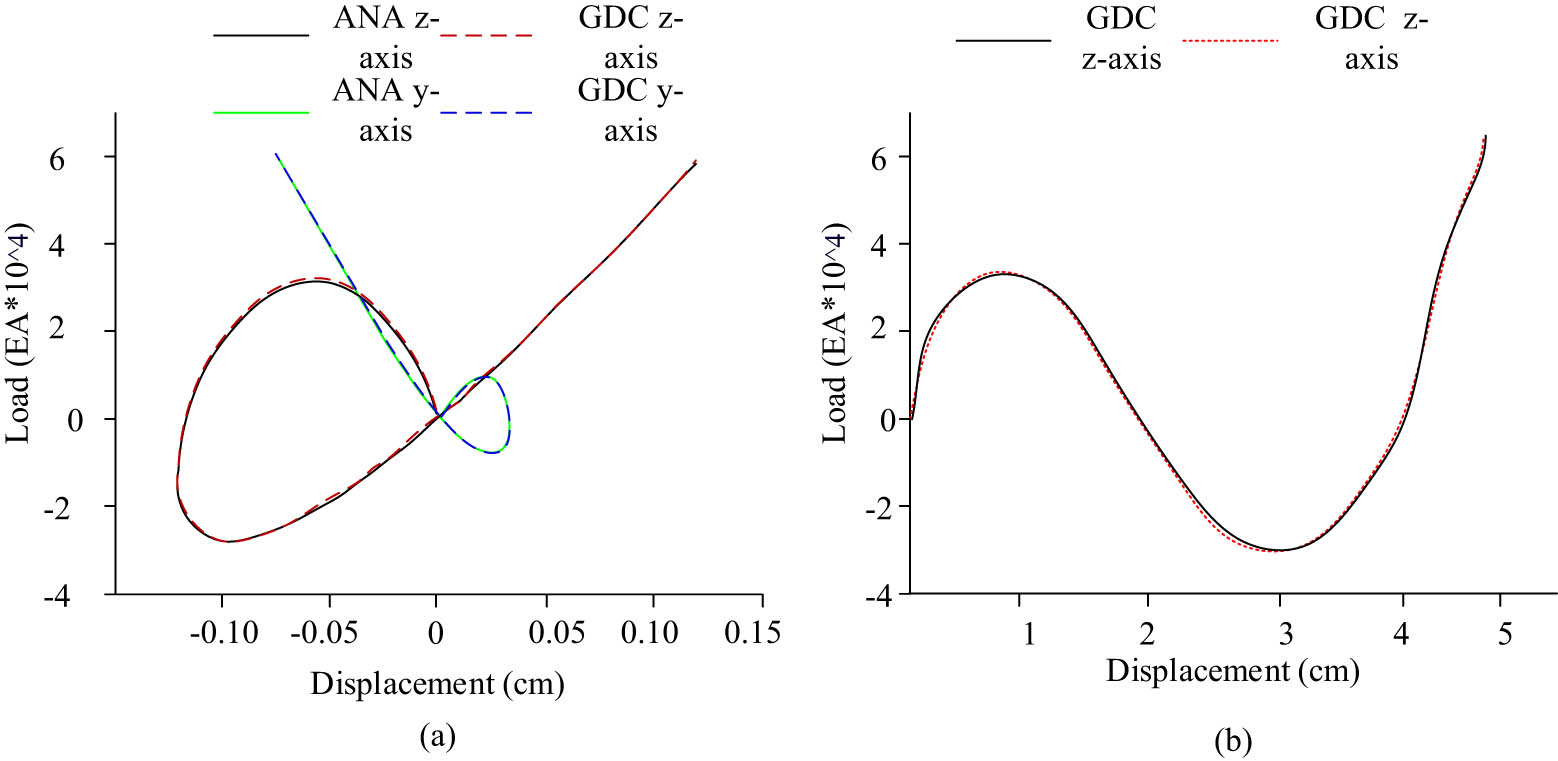
Node load–displacement curves using different methods: (a) Node 2 load displacement curve and (b) Node 1 load displacement curve.
In Figure 6, ANA represents the finite element analysis method, while GDC represents the analysis and calculation method constructed for the study. The proposed method is very close to the theoretical exact solution in the load–displacement curves of two nodes, indicating the accuracy of the analysis method. Experiments showed that the model constructed by the study could accurately predict and handle the performance of spatial frame structures when they reached their ultimate load-bearing capacity after introducing a stiffness matrix for analysis. Afterward, the study evaluates the efficiency of different methods, as shown in Figure 7.
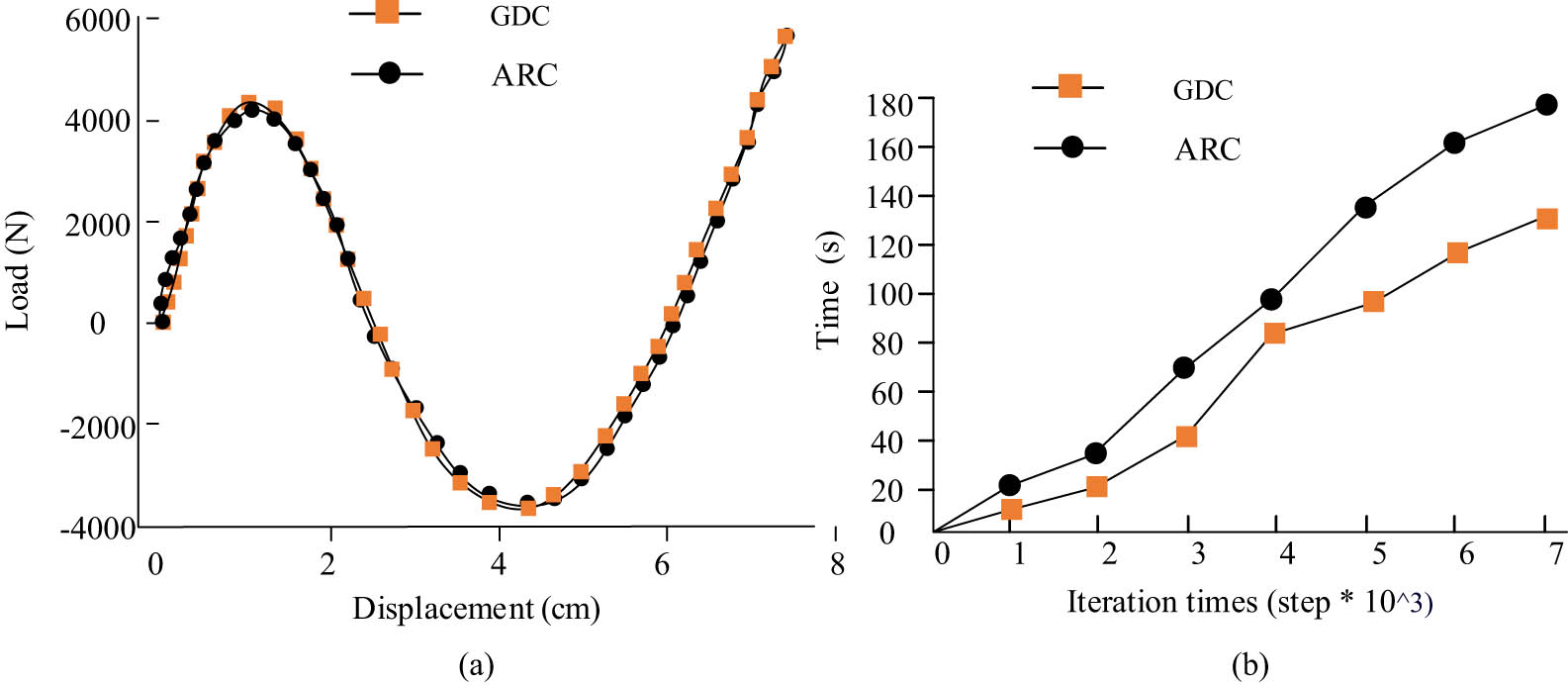
Load–displacement curves and calculation time of different methods: (a) Node 1 load displacement curve and (b) calculation time.
In Figure 7, ARC represents the cross-sectional method, while GDC represents the analytical calculation method constructed for the study. The method proposed in the study had similar load–displacement curves and section method curves, with a final time of 126 s in 700 incremental iteration steps, while the section method had a final time of 177 s. The method proposed in the study had optimized the time consumption by 28.8% compared to the cross-sectional method while maintaining the same performance.
3.2 Comparative experiment of the orthogonal constraint optimization GDC method
First, to analyze the computational performance of the model under different load conditions, the study will design different load conditions and analyze the performance of the orthogonal constraint optimized GDC method constructed under different loads in the calculation. First, the load is set to be uniformly applied from node 1. In the first working condition, the load method is to apply external loads directly, while in the second condition, the load is applied in a form greater than the external load. When the load of the second working condition exceeds that of the first working condition excessively, it will cause significant differences in nonlinear behavior. Therefore, the load of the second working condition in the study area is 1.01 times that of the first working condition. The load–displacement curves under two operating conditions are shown in Figure 8.
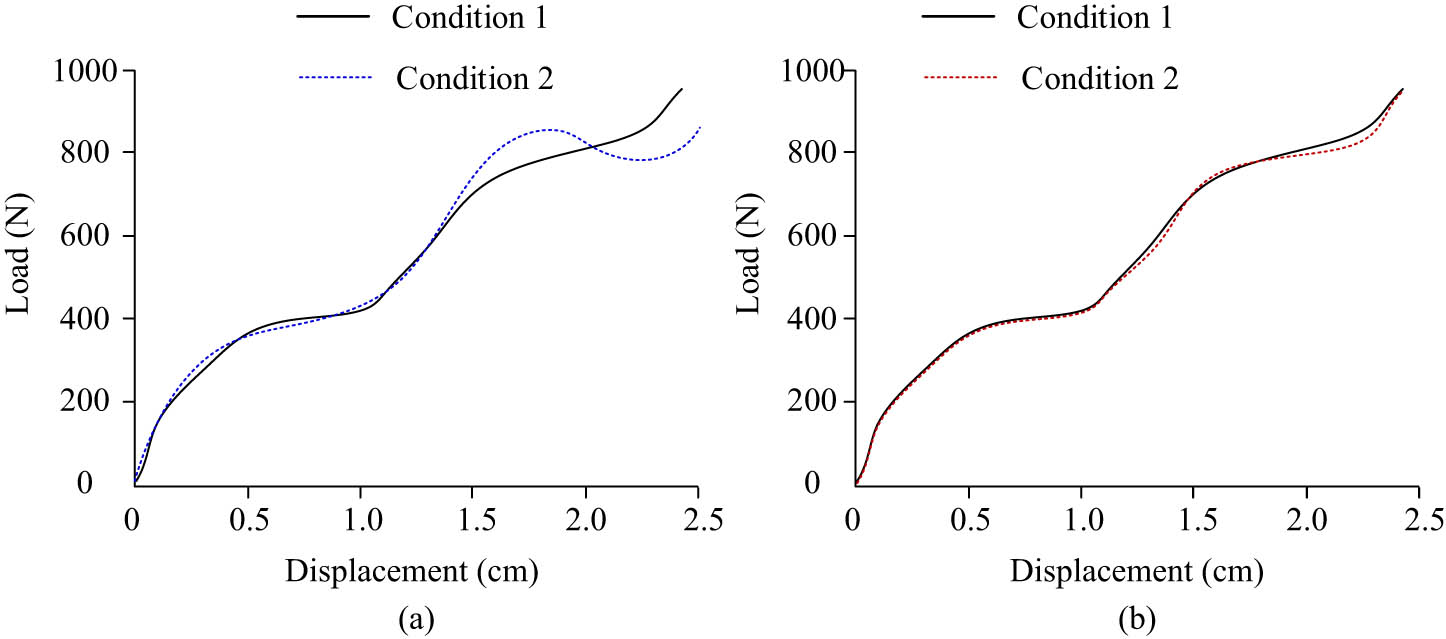
Load–displacement curves under different working conditions: (a) ARC load displacement curve and (b) GDC load displacement curve.
In Figure 8, under different operating conditions, the load–displacement curve of the cross-sectional method varied greatly, while the model constructed by the study is less affected by the change in operating conditions. From Figure 8(a), it can be seen that under the section method analysis, when the displacement of the contact element reaches 2.5 cm, the calculated load difference is as high as 97 N. In Figure 8(b), under the method of research construction, after the displacement of the method reaches 2.5 in the two working conditions, the load difference between different working conditions is only 4 N. To analyze and study the role of the proposed optimized GDC method in nonlinear structural deformation impact, a seismic wave with a peak acceleration of 1.2 g is input for 14 s in the simulation experiment. In the simulated disaster environment, the horizontal displacement of the simulated spatial truss structure is shown in Figure 9.
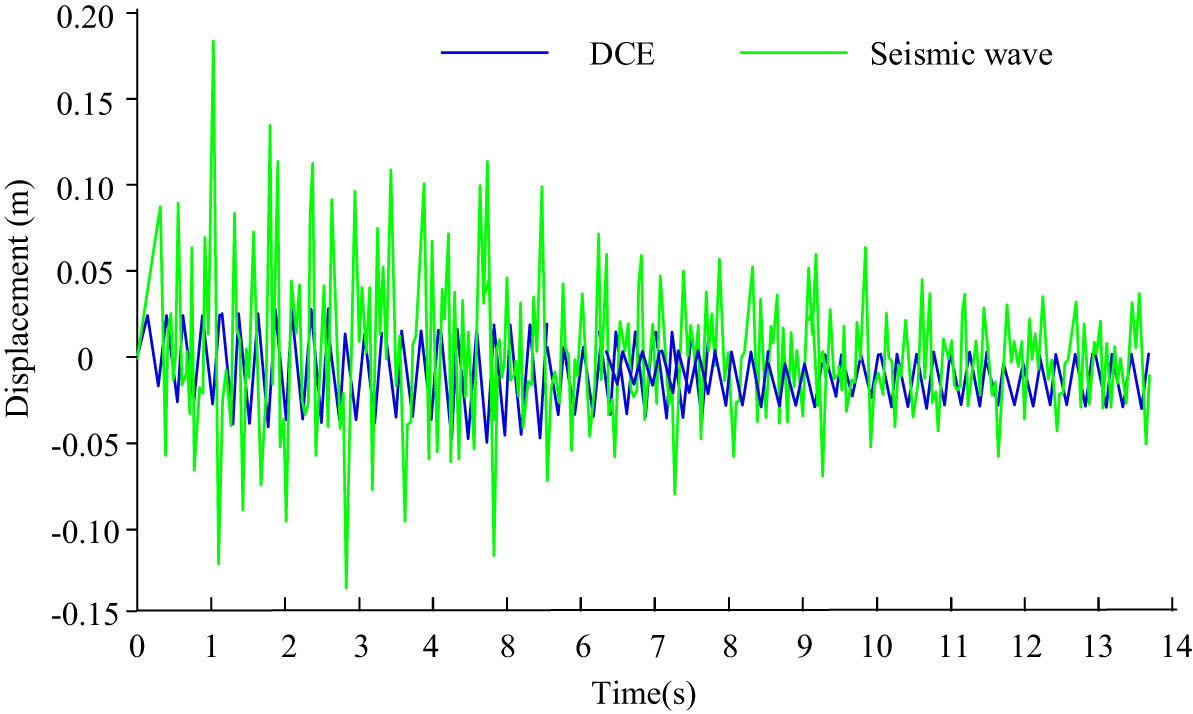
Horizontal displacement of spatial truss structures in simulated disaster environments.
The DEM in Figure 9 represents the discrete element analysis method. In Figure 9, the horizontal displacement results of the optimized GDC structure used in the study had a high similarity in waveform with the horizontal acceleration of seismic waves. The experiment showed that the N + 1 dimension theory used in the research method could effectively respond to and adjust the scope of application of the calculation method. The consistency and accuracy of calculation and analysis could also be maintained under the influence of geological disasters. The study analyzes the ultimate load fluctuations of contact elements in spatial truss structures under the influence of geological disasters, and the specific results are shown in Figure 10.
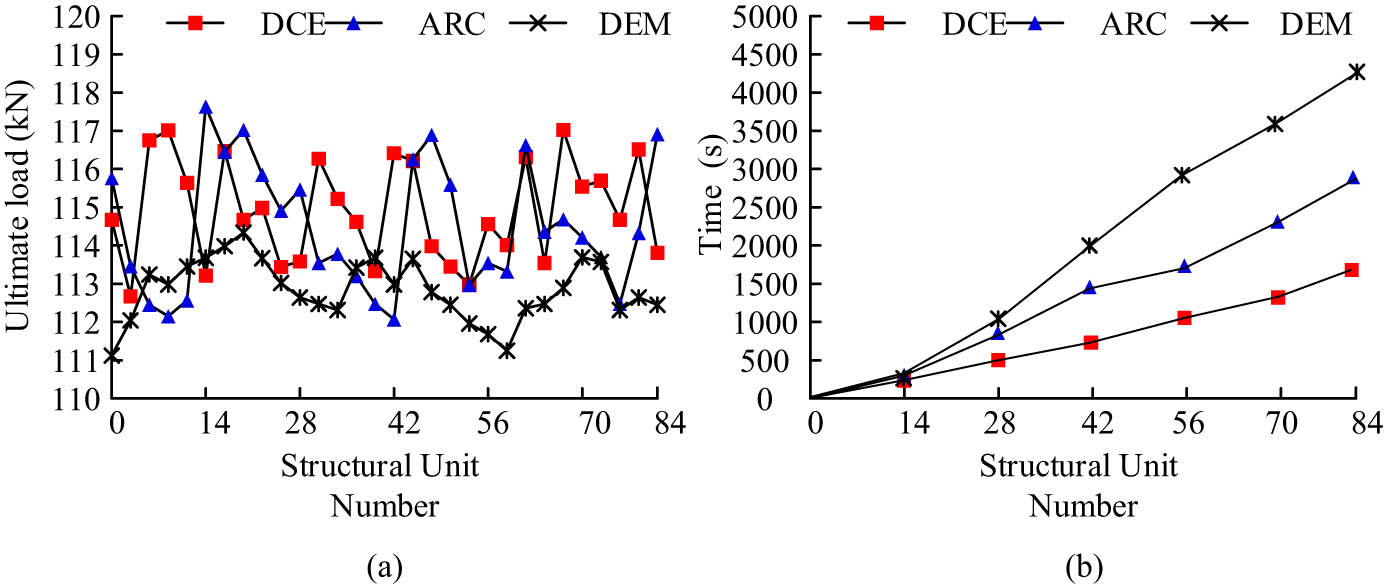
Ultimate load calculation and time consumption of contact elements in spatial truss structures: (a) structural critical load of different algorithms and (b) calculation time of different algorithms.
As shown in Figure 10, the difference in the ultimate load calculation of the contact element of the spatial truss structure between the algorithm models proposed by the three algorithms and the section method is relatively small, while the ultimate load obtained by the discrete element analysis method is larger compared to the other two methods. The average load calculation result of the discrete element analysis method for 84 contact elements is 112.6 kN, while the calculation results of the section method and the GDC method constructed in the study are 113.9 and 114.7 kN, respectively. In Figure 10(b), the constructed method took 1,615 s to calculate the ultimate load of 84 contact elements, while the cross-sectional method took 2,840 s to calculate all contact elements. The discrete element analysis method performed the worst in terms of computational efficiency, with a final computation time of 4,322 s. The time complexity of different algorithm models is shown in Figure 11.
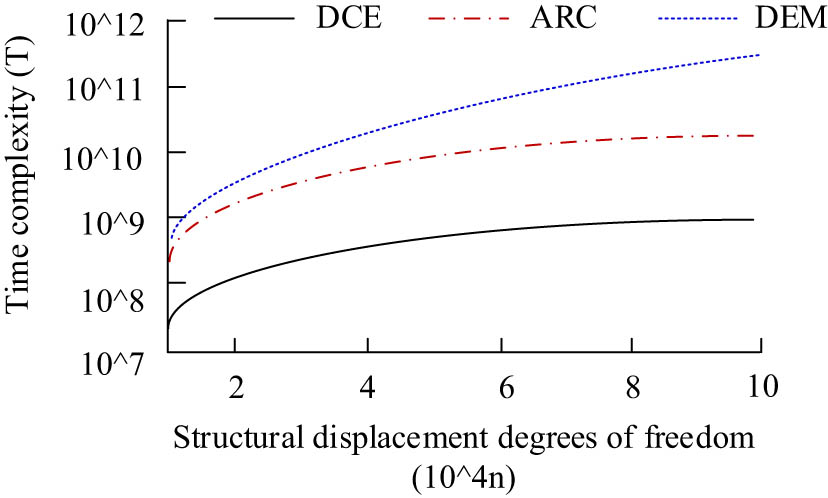
Time complexity of different algorithm models.
From Figure 11, it can be seen that with the increase of structural degrees of freedom, the time complexity of all three models shows an upward trend. However, the model constructed by the research has the smallest increase in magnitude, with a final time complexity of less than 109 T, while the time service reading of the discrete element model is greater than 1011 T, and the time complexity of the cross-sectional method is close to 1010 T. Afterward, the horizontal displacement and deformation degree of 13 nodes are compared in the study, and the specific results are shown in Table 2.
Displacement and deformation of spatial truss structure nodes
| Node | Prediction displacement (cm) | Theory displacement | Deformation prediction | Theory deformation |
|---|---|---|---|---|
| 1 | 0.62 | 0.57 | Undeformed | Undeformed |
| 2 | 0.88 | 0.85 | Undeformed | Undeformed |
| 3 | 0.91 | 0.92 | Deformation | Deformation |
| 4 | 0.86 | 0.85 | Undeformed | Undeformed |
| 5 | 0.81 | 0.86 | Undeformed | Undeformed |
| 6 | 0.86 | 0.86 | Undeformed | Undeformed |
| 7 | 0.91 | 0.93 | Deformation | Deformation |
| 8 | 0.25 | 0.19 | Undeformed | Undeformed |
| 9 | 0.15 | 0.16 | Undeformed | Undeformed |
| 10 | 0.21 | 0.18 | Undeformed | Undeformed |
| 11 | 0.22 | 0.21 | Undeformed | Undeformed |
| 12 | 0.23 | 0.26 | Undeformed | Undeformed |
| 13 | 0.22 | 0.24 | Undeformed | Undeformed |
As observed in Table 2, among the 13 nodes, the maximum error of the constructed method in displacement calculation is only 0.06 cm, and the minimum error is 0 cm. Meanwhile, in all 13 nodes, the deformation judgment results calculated by the proposed method are correct. Therefore, the model constructed in the study can still accurately determine the displacement and deformation properties of building structures even after simulating earthquake disasters. Finally, the study will compare the differences between the GDC method, multi-point displacement control, and traditional LDL decomposition method constructed under different load conditions. In the comparative experiment, the three operating conditions are set as static overturning load, continuously increasing load, and reciprocating load. The specific results are shown in Table 3.
Load calculation and time complexity of different algorithm models under different operation conditions
| Working conditions | Static overturning load | Continuously increasing the load | Cyclic loading | |||
|---|---|---|---|---|---|---|
| Algorithm | Average load (kN) | Time complexity (T) | Average load (kN) | Time complexity (T) | Average load (kN) | Time complexity (T) |
| LDL | 114.2 | 0.55 × 107 | 116.3 | 0.16 × 109 | 113.9 | 0.72 × 108 |
| MDC | 115.4 | 0.93 × 108 | 117.1 | 1.4 × 1010 | 114.4 | 1.1 × 1010 |
| DCE | 114.7 | 0.52 × 107 | 115.6 | 0.32 × 108 | 114.6 | 0.52 × 107 |
From Table 3, it can be seen that under the static overturning load conditions, the proposed algorithm has a time complexity of 0.52 × 107 T, which is lower than other algorithm models. At the same time, under dynamic working conditions such as continuously increasing loads and reciprocating loads, the proposed algorithm has time complexities of 0.32 × 108 T and 0.52 × 107 T, respectively, which are lower than other algorithm models.
4 Conclusions
To verify the performance of the improved incremental iteration method constructed in geometric nonlinear calculations, this study explored the advantages of the method from its adaptability and performance comparison. First, in the 700 incremental iteration steps of simulating the hexagonal star-shaped spatial truss structure, the final time consumption was 126 s, while the cross-sectional method took 177 s. The method proposed in the study optimized the time consumption by 28.8% compared to the cross-sectional method while maintaining the same performance. Meanwhile, under the influence of simulated seismic waves, the method constructed in the study took 1,615 s to calculate the ultimate load of 84 contact elements, while the section method took 2,840 s to calculate all contact elements. The discrete element analysis method performed the worst in computational efficiency, with a final calculation time of 4,322 s. Finally, among the 13 nodes of the spatial model, the maximum error of the constructed method in displacement calculation was only 0.06 cm, and the minimum error was 0 cm, while the deformation judgment results obtained by the method were all correct. Experimental results have shown that the model constructed by the study has good computational accuracy and efficiency in conventional environments. Meanwhile, it can maintain a good displacement increment calculation performance even under changes in load application methods and seismic effects. The limitation of the study is that only one type of structure was used for simulation in the experiment. In future research, additional building structures can be considered for exploration.
-
Funding information: This study received no funding.
-
Author contributions: In response to the shortcomings of insufficient efficiency in calculating geometric nonlinear features and high environmental impact in the current construction, this study explores the construction control of nonlinear geometric structures based on an updated Lagrangian model function. L.L. conducted experiments, recorded data, analyzed the results, and wrote the manuscript. The author agreed to the published version of the manuscript and confirmed that all images are original.
-
Conflict of interest: The author declares no conflict of interests.
-
Data availability statement: All data generated or analysed during this study are included in this published article.
References
[1] Glass O, Kolumbán JJ, Sueur F. External boundary control of the motion of a rigid body immersed in a perfect two-dimensional fluid. Anal PDE. 2020;13(3):651–84.10.2140/apde.2020.13.651Suche in Google Scholar
[2] Coevoet E, Benchekroun O, Kry PG. Adaptive merging for rigid body simulation. ACM Trans Graphic (TOG). 2020;39(4):13–35.10.1145/3386569.3392417Suche in Google Scholar
[3] Touzé C, Vizzaccaro A, Thomas O. Model order reduction methods for geometrically nonlinear structures: a review of nonlinear techniques. Nonlinear Dyn. 2021;105(2):1141–90.10.1007/s11071-021-06693-9Suche in Google Scholar
[4] Deng J, Tan J, Tan P, Tian ZC. A geometric nonlinear plane beam element based on corotational formulation and on stability functions. Eng Mech. 2020;37(11):28–35.Suche in Google Scholar
[5] Ma Q, Grushin AG, Burch KS. Topology and geometry under the nonlinear electromagnetic spotlight. Nat Mater. 2021;20(12):1601–14.10.1038/s41563-021-00992-7Suche in Google Scholar
[6] Xu M, Zeng B, Qiao H, Xu Q, Guo WW, Xia H. Nonlinear dynamic response analysis of wind-train-bridge coupling system of hu-su-tong bridge. Eng Mech. 2021;38(10):83–9+133.Suche in Google Scholar
[7] Zhao W, Gao S, Huang Y. Nonlinear stability analysis of functionally graded shallow spherical shells in thermal environments. Eng Mech. 2020;37(8):202–12.Suche in Google Scholar
[8] Wen G, Liu J, Chen Z, Wei P, Long K, Wang H, et al. A survey of nonlinear continuum topology optimization methods. Chin J Theor Appl Mech. 2022;54(10):2659–75.Suche in Google Scholar
[9] Huang X, Zhang Y, Moradi Z, Shafiei N. Computer simulation via a couple of homotopy perturbation methods and the generalized differential quadrature method for nonlinear vibration of functionally graded non-uniform micro-tube. Eng Comput. 2022;38(3):2481–98.10.1007/s00366-021-01395-7Suche in Google Scholar
[10] Yang Z, Zhang A, Sudjianto A. Enhancing explainability of neural networks through architecture constraints. IEEE Trans Neural Network Learn Syst. 2020;32(6):2610–21.10.1109/TNNLS.2020.3007259Suche in Google Scholar
[11] Wu X, Xu X, Liu J, Wang H, Hu B, Nie F. Supervised feature selection with orthogonal regression and feature weighting. IEEE Trans Neural Network Learn Syst. 2020;32(5):1831–8.10.1109/TNNLS.2020.2991336Suche in Google Scholar
[12] Maghami A, Schillinger D. A stiffness parameter and truncation error criterion for adaptive path following in structural mechanics. Int J Numer Method Eng. 2020;121(5):967–89.10.1002/nme.6253Suche in Google Scholar
[13] Jouneghani HG, Haghollahi A. Assessing the seismic behavior of steel moment frames equipped by elliptical brace through incremental dynamic analysis (IDA). Earthq Eng Eng Vib. 2020;19(2):435–49.10.1007/s11803-020-0572-zSuche in Google Scholar
[14] Aggarwal R, Ugail H, Jha RK. A deep artificial neural network architecture for mesh free solutions of nonlinear boundary value problems. Appl Intell. 2022;52(1):916–26.10.1007/s10489-021-02474-4Suche in Google Scholar
[15] Xu F, Guo Z, Chen H. A custom parallel hardware architecture of nonlinear model-predictive control on fpga. IEEE Trans Ind Electr. 2021;69(11):11569–79.10.1109/TIE.2021.3118427Suche in Google Scholar
[16] Gonchenko SV, Gonchenko AS, Kazakov AO. Three types of attractors and mixed dynamics of nonholonomic models of rigid body motion. Proc Steklov Inst Math. 2020;308(1):125–40.10.1134/S0081543820010101Suche in Google Scholar
[17] Luo L, Song PXK. Renewable estimation and incremental inference in generalized linear models with streaming data sets. J Roy Stat Soc Ser B: Stat Met. 2020;82(1):69–97.10.1111/rssb.12352Suche in Google Scholar
[18] Usman AM, Abdullah MK. An assessment of building energy consumption characteristics using analytical energy and carbon footprint assessment model. Green Low-Carbon Econ. 2023;1(1):28–40.10.47852/bonviewGLCE3202545Suche in Google Scholar
© 2024 the author(s), published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Artikel in diesem Heft
- Editorial
- Focus on NLENG 2023 Volume 12 Issue 1
- Research Articles
- Seismic vulnerability signal analysis of low tower cable-stayed bridges method based on convolutional attention network
- Robust passivity-based nonlinear controller design for bilateral teleoperation system under variable time delay and variable load disturbance
- A physically consistent AI-based SPH emulator for computational fluid dynamics
- Asymmetrical novel hyperchaotic system with two exponential functions and an application to image encryption
- A novel framework for effective structural vulnerability assessment of tubular structures using machine learning algorithms (GA and ANN) for hybrid simulations
- Flow and irreversible mechanism of pure and hybridized non-Newtonian nanofluids through elastic surfaces with melting effects
- Stability analysis of the corruption dynamics under fractional-order interventions
- Solutions of certain initial-boundary value problems via a new extended Laplace transform
- Numerical solution of two-dimensional fractional differential equations using Laplace transform with residual power series method
- Fractional-order lead networks to avoid limit cycle in control loops with dead zone and plant servo system
- Modeling anomalous transport in fractal porous media: A study of fractional diffusion PDEs using numerical method
- Analysis of nonlinear dynamics of RC slabs under blast loads: A hybrid machine learning approach
- On theoretical and numerical analysis of fractal--fractional non-linear hybrid differential equations
- Traveling wave solutions, numerical solutions, and stability analysis of the (2+1) conformal time-fractional generalized q-deformed sinh-Gordon equation
- Influence of damage on large displacement buckling analysis of beams
- Approximate numerical procedures for the Navier–Stokes system through the generalized method of lines
- Mathematical analysis of a combustible viscoelastic material in a cylindrical channel taking into account induced electric field: A spectral approach
- A new operational matrix method to solve nonlinear fractional differential equations
- New solutions for the generalized q-deformed wave equation with q-translation symmetry
- Optimize the corrosion behaviour and mechanical properties of AISI 316 stainless steel under heat treatment and previous cold working
- Soliton dynamics of the KdV–mKdV equation using three distinct exact methods in nonlinear phenomena
- Investigation of the lubrication performance of a marine diesel engine crankshaft using a thermo-electrohydrodynamic model
- Modeling credit risk with mixed fractional Brownian motion: An application to barrier options
- Method of feature extraction of abnormal communication signal in network based on nonlinear technology
- An innovative binocular vision-based method for displacement measurement in membrane structures
- An analysis of exponential kernel fractional difference operator for delta positivity
- Novel analytic solutions of strain wave model in micro-structured solids
- Conditions for the existence of soliton solutions: An analysis of coefficients in the generalized Wu–Zhang system and generalized Sawada–Kotera model
- Scale-3 Haar wavelet-based method of fractal-fractional differential equations with power law kernel and exponential decay kernel
- Non-linear influences of track dynamic irregularities on vertical levelling loss of heavy-haul railway track geometry under cyclic loadings
- Fast analysis approach for instability problems of thin shells utilizing ANNs and a Bayesian regularization back-propagation algorithm
- Validity and error analysis of calculating matrix exponential function and vector product
- Optimizing execution time and cost while scheduling scientific workflow in edge data center with fault tolerance awareness
- Estimating the dynamics of the drinking epidemic model with control interventions: A sensitivity analysis
- Online and offline physical education quality assessment based on mobile edge computing
- Discovering optical solutions to a nonlinear Schrödinger equation and its bifurcation and chaos analysis
- New convolved Fibonacci collocation procedure for the Fitzhugh–Nagumo non-linear equation
- Study of weakly nonlinear double-diffusive magneto-convection with throughflow under concentration modulation
- Variable sampling time discrete sliding mode control for a flapping wing micro air vehicle using flapping frequency as the control input
- Error analysis of arbitrarily high-order stepping schemes for fractional integro-differential equations with weakly singular kernels
- Solitary and periodic pattern solutions for time-fractional generalized nonlinear Schrödinger equation
- An unconditionally stable numerical scheme for solving nonlinear Fisher equation
- Effect of modulated boundary on heat and mass transport of Walter-B viscoelastic fluid saturated in porous medium
- Analysis of heat mass transfer in a squeezed Carreau nanofluid flow due to a sensor surface with variable thermal conductivity
- Navigating waves: Advancing ocean dynamics through the nonlinear Schrödinger equation
- Experimental and numerical investigations into torsional-flexural behaviours of railway composite sleepers and bearers
- Novel dynamics of the fractional KFG equation through the unified and unified solver schemes with stability and multistability analysis
- Analysis of the magnetohydrodynamic effects on non-Newtonian fluid flow in an inclined non-uniform channel under long-wavelength, low-Reynolds number conditions
- Convergence analysis of non-matching finite elements for a linear monotone additive Schwarz scheme for semi-linear elliptic problems
- Global well-posedness and exponential decay estimates for semilinear Newell–Whitehead–Segel equation
- Petrov-Galerkin method for small deflections in fourth-order beam equations in civil engineering
- Solution of third-order nonlinear integro-differential equations with parallel computing for intelligent IoT and wireless networks using the Haar wavelet method
- Mathematical modeling and computational analysis of hepatitis B virus transmission using the higher-order Galerkin scheme
- Mathematical model based on nonlinear differential equations and its control algorithm
- Bifurcation and chaos: Unraveling soliton solutions in a couple fractional-order nonlinear evolution equation
- Space–time variable-order carbon nanotube model using modified Atangana–Baleanu–Caputo derivative
- Minimal universal laser network model: Synchronization, extreme events, and multistability
- Valuation of forward start option with mean reverting stock model for uncertain markets
- Geometric nonlinear analysis based on the generalized displacement control method and orthogonal iteration
- Fuzzy neural network with backpropagation for fuzzy quadratic programming problems and portfolio optimization problems
- B-spline curve theory: An overview and applications in real life
- Nonlinearity modeling for online estimation of industrial cooling fan speed subject to model uncertainties and state-dependent measurement noise
- Quantitative analysis and modeling of ride sharing behavior based on internet of vehicles
- Review Article
- Bond performance of recycled coarse aggregate concrete with rebar under freeze–thaw environment: A review
- Retraction
- Retraction of “Convolutional neural network for UAV image processing and navigation in tree plantations based on deep learning”
- Special Issue: Dynamic Engineering and Control Methods for the Nonlinear Systems - Part II
- Improved nonlinear model predictive control with inequality constraints using particle filtering for nonlinear and highly coupled dynamical systems
- Anti-control of Hopf bifurcation for a chaotic system
- Special Issue: Decision and Control in Nonlinear Systems - Part I
- Addressing target loss and actuator saturation in visual servoing of multirotors: A nonrecursive augmented dynamics control approach
- Collaborative control of multi-manipulator systems in intelligent manufacturing based on event-triggered and adaptive strategy
- Greenhouse monitoring system integrating NB-IOT technology and a cloud service framework
- Special Issue: Unleashing the Power of AI and ML in Dynamical System Research
- Computational analysis of the Covid-19 model using the continuous Galerkin–Petrov scheme
- Special Issue: Nonlinear Analysis and Design of Communication Networks for IoT Applications - Part I
- Research on the role of multi-sensor system information fusion in improving hardware control accuracy of intelligent system
- Advanced integration of IoT and AI algorithms for comprehensive smart meter data analysis in smart grids
Artikel in diesem Heft
- Editorial
- Focus on NLENG 2023 Volume 12 Issue 1
- Research Articles
- Seismic vulnerability signal analysis of low tower cable-stayed bridges method based on convolutional attention network
- Robust passivity-based nonlinear controller design for bilateral teleoperation system under variable time delay and variable load disturbance
- A physically consistent AI-based SPH emulator for computational fluid dynamics
- Asymmetrical novel hyperchaotic system with two exponential functions and an application to image encryption
- A novel framework for effective structural vulnerability assessment of tubular structures using machine learning algorithms (GA and ANN) for hybrid simulations
- Flow and irreversible mechanism of pure and hybridized non-Newtonian nanofluids through elastic surfaces with melting effects
- Stability analysis of the corruption dynamics under fractional-order interventions
- Solutions of certain initial-boundary value problems via a new extended Laplace transform
- Numerical solution of two-dimensional fractional differential equations using Laplace transform with residual power series method
- Fractional-order lead networks to avoid limit cycle in control loops with dead zone and plant servo system
- Modeling anomalous transport in fractal porous media: A study of fractional diffusion PDEs using numerical method
- Analysis of nonlinear dynamics of RC slabs under blast loads: A hybrid machine learning approach
- On theoretical and numerical analysis of fractal--fractional non-linear hybrid differential equations
- Traveling wave solutions, numerical solutions, and stability analysis of the (2+1) conformal time-fractional generalized q-deformed sinh-Gordon equation
- Influence of damage on large displacement buckling analysis of beams
- Approximate numerical procedures for the Navier–Stokes system through the generalized method of lines
- Mathematical analysis of a combustible viscoelastic material in a cylindrical channel taking into account induced electric field: A spectral approach
- A new operational matrix method to solve nonlinear fractional differential equations
- New solutions for the generalized q-deformed wave equation with q-translation symmetry
- Optimize the corrosion behaviour and mechanical properties of AISI 316 stainless steel under heat treatment and previous cold working
- Soliton dynamics of the KdV–mKdV equation using three distinct exact methods in nonlinear phenomena
- Investigation of the lubrication performance of a marine diesel engine crankshaft using a thermo-electrohydrodynamic model
- Modeling credit risk with mixed fractional Brownian motion: An application to barrier options
- Method of feature extraction of abnormal communication signal in network based on nonlinear technology
- An innovative binocular vision-based method for displacement measurement in membrane structures
- An analysis of exponential kernel fractional difference operator for delta positivity
- Novel analytic solutions of strain wave model in micro-structured solids
- Conditions for the existence of soliton solutions: An analysis of coefficients in the generalized Wu–Zhang system and generalized Sawada–Kotera model
- Scale-3 Haar wavelet-based method of fractal-fractional differential equations with power law kernel and exponential decay kernel
- Non-linear influences of track dynamic irregularities on vertical levelling loss of heavy-haul railway track geometry under cyclic loadings
- Fast analysis approach for instability problems of thin shells utilizing ANNs and a Bayesian regularization back-propagation algorithm
- Validity and error analysis of calculating matrix exponential function and vector product
- Optimizing execution time and cost while scheduling scientific workflow in edge data center with fault tolerance awareness
- Estimating the dynamics of the drinking epidemic model with control interventions: A sensitivity analysis
- Online and offline physical education quality assessment based on mobile edge computing
- Discovering optical solutions to a nonlinear Schrödinger equation and its bifurcation and chaos analysis
- New convolved Fibonacci collocation procedure for the Fitzhugh–Nagumo non-linear equation
- Study of weakly nonlinear double-diffusive magneto-convection with throughflow under concentration modulation
- Variable sampling time discrete sliding mode control for a flapping wing micro air vehicle using flapping frequency as the control input
- Error analysis of arbitrarily high-order stepping schemes for fractional integro-differential equations with weakly singular kernels
- Solitary and periodic pattern solutions for time-fractional generalized nonlinear Schrödinger equation
- An unconditionally stable numerical scheme for solving nonlinear Fisher equation
- Effect of modulated boundary on heat and mass transport of Walter-B viscoelastic fluid saturated in porous medium
- Analysis of heat mass transfer in a squeezed Carreau nanofluid flow due to a sensor surface with variable thermal conductivity
- Navigating waves: Advancing ocean dynamics through the nonlinear Schrödinger equation
- Experimental and numerical investigations into torsional-flexural behaviours of railway composite sleepers and bearers
- Novel dynamics of the fractional KFG equation through the unified and unified solver schemes with stability and multistability analysis
- Analysis of the magnetohydrodynamic effects on non-Newtonian fluid flow in an inclined non-uniform channel under long-wavelength, low-Reynolds number conditions
- Convergence analysis of non-matching finite elements for a linear monotone additive Schwarz scheme for semi-linear elliptic problems
- Global well-posedness and exponential decay estimates for semilinear Newell–Whitehead–Segel equation
- Petrov-Galerkin method for small deflections in fourth-order beam equations in civil engineering
- Solution of third-order nonlinear integro-differential equations with parallel computing for intelligent IoT and wireless networks using the Haar wavelet method
- Mathematical modeling and computational analysis of hepatitis B virus transmission using the higher-order Galerkin scheme
- Mathematical model based on nonlinear differential equations and its control algorithm
- Bifurcation and chaos: Unraveling soliton solutions in a couple fractional-order nonlinear evolution equation
- Space–time variable-order carbon nanotube model using modified Atangana–Baleanu–Caputo derivative
- Minimal universal laser network model: Synchronization, extreme events, and multistability
- Valuation of forward start option with mean reverting stock model for uncertain markets
- Geometric nonlinear analysis based on the generalized displacement control method and orthogonal iteration
- Fuzzy neural network with backpropagation for fuzzy quadratic programming problems and portfolio optimization problems
- B-spline curve theory: An overview and applications in real life
- Nonlinearity modeling for online estimation of industrial cooling fan speed subject to model uncertainties and state-dependent measurement noise
- Quantitative analysis and modeling of ride sharing behavior based on internet of vehicles
- Review Article
- Bond performance of recycled coarse aggregate concrete with rebar under freeze–thaw environment: A review
- Retraction
- Retraction of “Convolutional neural network for UAV image processing and navigation in tree plantations based on deep learning”
- Special Issue: Dynamic Engineering and Control Methods for the Nonlinear Systems - Part II
- Improved nonlinear model predictive control with inequality constraints using particle filtering for nonlinear and highly coupled dynamical systems
- Anti-control of Hopf bifurcation for a chaotic system
- Special Issue: Decision and Control in Nonlinear Systems - Part I
- Addressing target loss and actuator saturation in visual servoing of multirotors: A nonrecursive augmented dynamics control approach
- Collaborative control of multi-manipulator systems in intelligent manufacturing based on event-triggered and adaptive strategy
- Greenhouse monitoring system integrating NB-IOT technology and a cloud service framework
- Special Issue: Unleashing the Power of AI and ML in Dynamical System Research
- Computational analysis of the Covid-19 model using the continuous Galerkin–Petrov scheme
- Special Issue: Nonlinear Analysis and Design of Communication Networks for IoT Applications - Part I
- Research on the role of multi-sensor system information fusion in improving hardware control accuracy of intelligent system
- Advanced integration of IoT and AI algorithms for comprehensive smart meter data analysis in smart grids