Application of modified culture Kalman filter in bearing fault diagnosis
-
Wang Hailun
 and
Alexander Martinez
and
Alexander Martinez

Abstract
Rolling bearings are an important part of rotary machines. They are used most widely in various mechanical sectors, which are among the most vulnerable components in machines. This paper uses CKF algorithm to compile a signal analysis system, analyses the vibration signal of the rolling bearing, extracts fault features, and realizes fault diagnosis. In order to improve the estimation accuracy of bearing fault diagnosis under nonlinear model, a nonlinear model of bearing fault diagnosis based on quaternion and low-accuracy high-noise sensors is established, and the attitude estimation has performed using the culture Kalman filter (CKF) algorithm. The sensor data comparison shows that the use of the volumetric Kalman filter algorithm can effectively improve the estimation accuracy of bearing fault diagnosis and stability. In this paper, the measured vibration signals of several groups of rolling bearings are analysed, and the signal characteristic frequency has extracted. The results show that using the analysis software designed in this paper, several typical faults of rolling bearings can be correctly identified.
1 Introduction
With the development of science and technology, modern industry is gradually making large-scale, complex, high-speed, and automated production equipment. It has great advantages in increasing productivity, lowering costs, saving energy, reducing scrap rate, and ensuring product quality [1]. However, catastrophic accidents caused by failures and the resulting loss of life and property and damage to the environment are also serious [2], which has led to people’s influence on such things as aerospace vehicles, nuclear power plants, thermal power plants and others. The reliability and safety of large-scale chemical equipment have raised higher requirements. In addition to improving the system reliability and safety of reliability design, researching and applying new materials, new processes, and strengthening quality control measures in the production process during the design and manufacturing stages, the system reliability and safety are improved. An important approach is to monitor and diagnose the working status of the system in real time, which helps to achieve effective control of the equipment and provide early warning of the occurrence of catastrophic failures, and provide effective information for taking corresponding remedial measures [3]. Fault diagnosis theory has developed to meet the requirements of system reliability and safety requirements, and to reduce and control the occurrence of catastrophic accidents [4]. Therefore, the development of fault diagnosis theory will inevitably promote the rapid development and widespread application of fault monitoring and monitoring systems, which can further improve the reliability and safety of system operation, and thus produce huge economic and social benefits [5, 6].
Compared with other mechanical components, rolling bearings have a unique feature, that is, its life is discrete [7]. Due to this feature of the bearing, there will be such a situation: some bearings have already exceeded their design life and can still work normally, and some bearings fail to reach their design life and appear various failures. Therefore, if the bearing is regularly repaired according to its design life, on the one hand, the bearing that exceeds the design life but still works will be removed for disposal, resulting in waste; on the other hand, bearings that fail to reach the design life will fail. The timely discovery has not removed until regular maintenance and was scrapped. This made the machine work less accurately after a bearing failure and before it was scrapped, or a serious failure occurred without maintenance time, resulting in the entire machine being in a paralysed state[8]. Therefore, the early detection and fault diagnosis of the rolling bearing working status and faults have important practical significance for the safe and stable operation of the equipment [9].
With the ever-increasing speed, automation, large-scale, and complicated modern mechanical equipment, people are increasingly demanding the safety and reliability of mechanical equipment. Once the mechanical equipment is out of order, it will have a huge impact on production and quality. It even poses a threat to people’s lives [10]. Bearing fault diagnosis and adjustment is the bottleneck of the improvement of bearing operation efficiency, involving three important links such as alignment, rolling and anti-shake. Bearing fault diagnosis has usually represented by rotation angle, tilt angle and roll angle, which provides operators with spreaders. The attitude information guides the loading and unloading operation of the bearing, and provides the attitude parameter data for the control system to ensure the safety of the loading and unloading process.
In view of this, this study will introduce the CKF pose estimation link into the control system. The basic idea is to use the CKF algorithm to calculate the pose estimation and attitude measurement signals of the previous stage to obtain the optimal pose estimation. The controller performs attitude adjustment control. This method can theoretically achieve two effects. (1) The attitude control signal provided to the controller is the best estimate of the original attitude development trend, with reasonable advance analysis and The pre-judgment property makes the control system have attitude adjustment convergence properties, and the system becomes stable. (2) We can reduce the passive disturbance (mechanical vibration and wind speed influence) outside the control system of the bearing fault diagnosis and the sensor self-noise interference of the measurement-monitoring unit to avoid these disturbances during the repetitive attitude adjustment, thereby affecting the system stability [11]. The bearing fault diagnosis control system is a large inertia flexible load, and the application of the CKF algorithm has not yet been seen in this field. Therefore, this paper uses the CKF algorithm to solve the bearing fault diagnosis based on the quaternion method, using a three-axis gyroscope. The triaxial acceleration sensor acquires sensor data from the bearing fault diagnosis and control test device, and applies the CKF algorithm to the bearing fault diagnosis and diagnosis. To find the comparison object, the SBG AHRS sensor produced by SBG Systems of France is used as the monitoring standard of bearing fault diagnosis.
2 Rolling bearing fault diagnosis and CKF methodology
2.1 Failure mechanism and characteristic frequency of rolling bearings
2.1.1 Analysis of causes of vibration of rolling bearings
Caused by the vibration and noise of rolling bearings, in addition to external excitation factors (such as the rotor is not stable, misalignment, fluid excitation, structural resonance and other vibration transmission), the internal vibration of the bearing can be divided into the following three types [12].
The first type is due to the vibration of the bearing structure itself. This section includes two points.
The rolling body vibration through the direction of the load;
The natural vibration of the ring;
The vibration caused by the elastic characteristics of the bearing.
The second type is caused by bearing shape and accuracy problems. This section includes two things.
Vibration caused by waviness of rings, raceways and rolling elements;
The rolling body size is uneven, the outer ring eccentric vibration;
The third type of vibration caused by improper use of bearings or improper assembly. This section includes three points.
Vibration caused by local defects in the contact surface of the raceway;
Poor lubrication, vibration caused by friction;
The assembly is not correct, vibration caused by deflection of the journal.
2.1.2 Calculation frequency of rolling bearing faults
When the rolling element meets a local defect at the contact with the raceway, an impact signal is generated. Defects on different components, the contact point through the frequency of the defect is not the same, this frequency is called the impact of the interval frequency and characteristic frequency. The interval frequency can be obtained from the analysis of the simple kinematics of the bearing based on the bearing rotation speed and the size of the bearing parts.
There are contact points A and B on the raceways of the outer ring and inner ring, respectively, as shown in Figure 1. If the radial clearance is zero, the circumferential speeds of point A and point B are respectively.
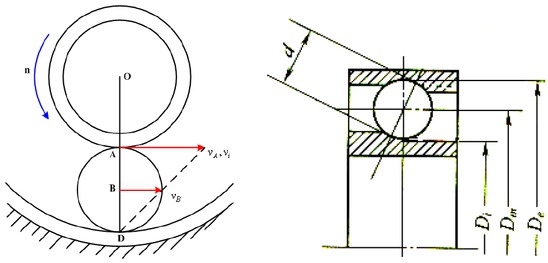
The relationship of the components in the rolling bearing
In the formula, Ve , Vi - the circumferential speed at the outer ring and inner ring raceway contact point, mm/s; De , Di - the diameter at the outer ring, inner ring raceway contact point, mm; ne , ni - the outer ring, inner ring speed, r/min.
In the formula d - rolling element diameter, mm; Dm - rolling element diameter of centre circle, mm; α - contact angle, reflecting the centreline of the contact point and the centreline of the rolling element in the axial direction of the bearing, rad.
The revolution speed of the rolling elements around the bearing centreline is the average of the speeds Vi and Ve.
The revolution speed of the rolling element is also the linear velocity of the cage centre circle. The line speed at a certain point on the cage centre circle is as follows.
From the above, the rotational speed of the cage is as follows.
The rotation speed of the inner ring relative to the cage is as follows.
The rotational speeds of the inner and outer rings with respect to the cage are as follows.
The rotation speed no of the rolling element can be obtained from the relationship between the linear velocities of the two objects at the contact point. For example, the linear velocity at the B point where the rolling element encounters the inner ring is as follows.
The negative sign in the formula indicates that the linear velocity of point B with respect to the centre of the rolling element in which the rolling element contacts the rolling element is as follows.
According to the pure rolling condition, the corresponding point B speed on the rolling contact point B and the inner ring raceway is equal.
The characteristic frequency of the shock vibration caused by local defects is as follows. Frequency of fault features when the inner ring is defective[13].
Fault feature frequency of the outer ring is defective.
Fault feature frequency of the ball is defective.
The fault feature frequency of the cage hitting the outer ring.
The fault feature frequency of the cage inner ring is as follows.
2.2 CKF derivation process
In order to alleviate the problem of filter divergence and numerical precision caused by rounding errors in the filtering process, the square root version of CKF has developed. CKF essentially propagates the square root of the error variance matrix, thus avoiding the matrix square root calculation and ensuring the variance matrix. The following summarizes the CKF algorithm [14]. Since the square root of the variance matrix in the general CKF is the Cholesky decomposition, this requires that the variance matrix is a positive definite symmetric matrix for unique decomposition. The QR decomposition only requires the matrix full rank or row full rank, so the CKF can be guaranteed to proceed.
Sk−1|k−1 is known and available, you can directly calculate Cubature points (i=1,2,...,m).
The point of propagation of Cubature through the equation of state is as follows.
We can estimate the state prediction at time k.
The square root of the estimated error covariance matrix is as follows.
Hence,
We can directly calculate Cubature points (i=1,2,...,m).
We can spread the Cubature points by observing the equations.
It is estimating observations at time k.
It is estimated autocorrelation covariance matrix.
Hence,
3 Design of vibration signal analysis system based on CKF
3.1 Overall system design
Based on the knowledge of the local mean and the knowledge of rolling bearing fault diagnosis, the structure of the CKF-based fault diagnosis system has designed in this paper. This paper uses MATLAB to write CKF decomposition algorithm. The function of decomposing the vibration signal of the rolling bearing is realized, which helps to obtain the instantaneous amplitude A of the PF component, the residual U, the pure frequency modulation function SI and the PF component with characteristic features [15]. In order to facilitate the user to analyse the vibration signal of the rolling bearing, CKF-based rolling bearing fault diagnose software is designed by the MATLAB GUI tool. Data file selection, parameter design, feature frequency calculation, display of CKF decomposed components, and feature frequency extraction are realized.
3.2 CKF algorithm program implementation
The key to this system is the specific programming of the CKF algorithm. According to the analysis in this paper, the steps for implementing the local mean decomposition method are as follows.
Find out the extreme points of the data sequence.
Use the moving average method to process each extreme point to obtain the first local mean function m11 and envelope estimation function a11.
Using the local average function m11 helps to separate the original signal to get the residual signal h11.
Use the residual signal and envelope estimation function to get si11.
Set the offset value to cycle until the termination condition is met, i.e. SI is a pure FM function.
After the decomposition, the PF component, the residual quantity U, the envelope function A, and the pure frequency function SI are returned.
The flowchart of the algorithm implemented in this paper is shown in Figure 2.
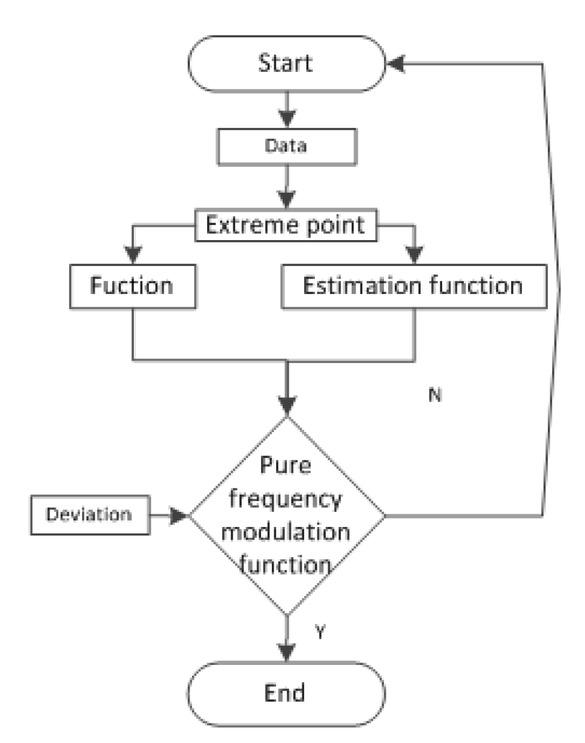
CKF algorithm design flow chart
The designed software is used to analyse the measured rolling bearing vibration signal, and the frequency components of the vibration signal are presented, and compared with the theoretically calculated frequency of the fault characteristic to realize the simple identification of the fault and verify the accuracy and reliability of the software designed in this paper.
3.3 Test data description
The measured data in this paper comes from the Case Western Reserve University Rolling Bearing Fault Data Centre. The test stand consists of a 2-horsepower motor (left), a torque converter/encoder, a dynamometer (right), and control electronics [13, 14, 15]. The test bearing supports the motor shaft. A single point of failure was introduced into the failed test bearing using EDM for 7 mil, 14 mil, 21 mil, 28 mil, and 40 mil (1 mil = 0.001 inch) diameters. SKF bearings were used for 7, 14 and 21 mil diameter failures, and NTN equivalent bearings were used for 28 mil and 40 mil failures.
An accelerometer is attached to the vibration data acquisition with the magnetic base housing. The accelerometer is placed at the 12 o’clock position at the two drive ends and the fan end of the motor housing. In some experiments, the accelerometer was mounted on a motor support base plate as well. The 16-channel DAT recorder was used to acquire the vibration signal and post-process it in a MATLAB environment. All data files are in MATLAB(*.mat) format. Digital data was collected at 12,000 samples per second, and data was collected at 48,000 samples per second for faults at the drive end bearing. Use the torque sensor/encoder to collect the speed and horsepower data and record the hand. The failure of the outer raceway is a fixed disadvantage, so that the placement of the fault in the load zone with respect to the bearing has a direct effect on the vibration response of the motor/bearing system. To quantify this effect, experiments were performed with bearings located at 3 o’clock (directly in the load zone), at 6 o’clock (perpendicular to the load zone) and at 12 o’clock on the outer race fault fan and drive end.
3.4 Measure bearing vibration signal and fault diagnosis
3.4.1 Inner ring fault vibration signal analysis
The vibration signal analysed software designed in this paper to analyse the test data to obtain Figure 3. The top of the software shows the time domain and frequency domain waveforms of the inner ring fault vibration signal [16]. The lower part of the software shows the power spectrum of the first four momentary amplitudes of the PF component obtained after the vibration signal is decomposed by CKF, from A1, A2. The characteristic frequency of the inner ring fault can be seen in the A3 power spectrum as 157.5 Hz.

PF1 component of inner ring failure
Figure 3 show the PF1 component diagram, Figure 4 shows the A1 component diagram and Figure 5 gives the A1-A4 power spectrum enlargement of the inner ring fault vibration signal.
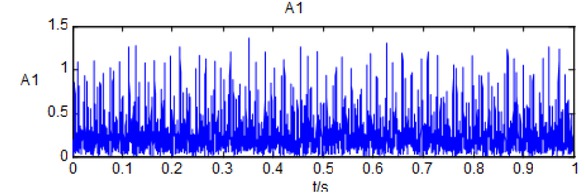
A1 component of inner ring fault
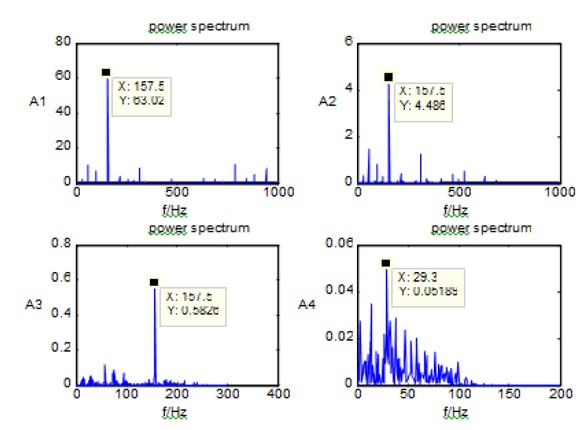
Inner Ring Faults A1, A2, A3, A4 Power Spectrum Enlargement
It can be seen from Figure 5 that the characteristic frequency extracted from the power spectrum obtained by decomposing the signal, the CKF is 157.5 Hz, and the theoretical frequency calculated from the bearing parameters of the test data is 157.9 Hz. Hence, the error rate is 0.25%, we can accurately determine the inner ring fault, which is consistent with the theory [17].
From the vibration signal analysed software of the power spectrum, we can see that A1 power spectrum
contains the fault feature frequency accompanied by frequency multiplication, which also contains some frequency; A2 power spectrum also contains the fault feature frequency with frequency multiplication. However, the frequency is more than that of A1. The A3 power spectrum contains the characteristic frequency without frequency multiplication, but the frequency is more; the A4 power spectrum does not include the characteristic frequency. Therefore, by comparison, the power spectrum of the instantaneous amplitude A1 of the PF1 component works best. This may be because the first PF component completely reflects the intrinsic nature of the signal, while the other PF components have separated by the first component.
3.4.2 Vibration signal analysis of outer ring faults
Using the designed vibration signal analysed software to analyse the test data is shown in Figure 4-5. The top of the software shows the time domain and frequency domain waveforms of the outer ring fault vibration signal [18]. The bottom of the software shows the power spectrum of the first four instantaneous amplitudes of the PF component obtained after the vibration signal is decomposed by the CKF. In the A3 power spectrum, the characteristic frequency of the inner ring fault can be seen as 104.7 Hz.. Figure 6, Figure 6, and Figure 8 show the PF1 component diagram, A1 component diagram, and A1 power spectrum diagram of the outer ring fault vibration signal, respectively.
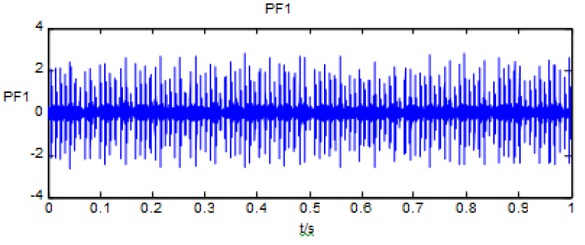
PF1 component diagram of outer ring fault
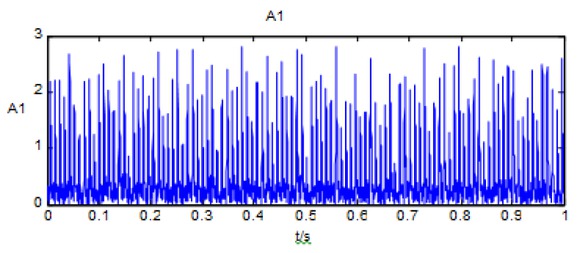
Outer ring fault A1 component diagram
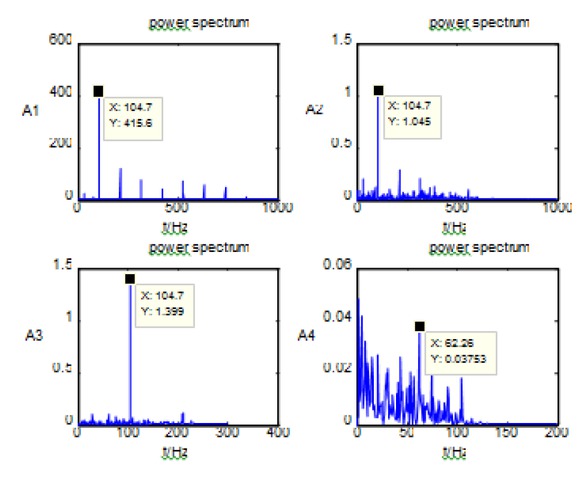
Outer ring faults A1, A2, A3, A4 power spectrum
It can be seen from Figure 8 that the characteristic frequency extracted from the power spectrum obtained by decomposing the signal through CKF is 104.7 Hz, and the theoretical characteristic frequency calculated from the bearing parameters of the test data is 104.5 Hz, and the error rate is 0.19%. Therefore, it can be accurately judged that this fault is an inner ring fault, which is consistent with the theory [19].
From the vibration signal analysed software of power spectrum, we can see that A1 power spectrum contains the fault feature frequency accompanied by frequency multiplication, which also contains some frequency; A2 power spectrum also contains the fault feature frequency with frequency multiplication However, the frequency is more than that of A1. The A3 power spectrum contains the characteristic frequency without frequency multiplication, but the frequency is more; the A4 power spectrum does not include the characteristic frequency [20]. Therefore, by comparison, the power spectrum of the instantaneous amplitude A1 of the PF1 component works best. This may be because the first PF component completely reflects the intrinsic nature of the signal, while the other PF components have separated by the first component.
3.4.3 Analysis of rolling fault vibration signal
The designed vibration signal analysis software to analyse the test data to obtain Figure 9. The top of the software shows the time domain and frequency domain waveforms of the rolling element fault vibration signal. The bottom of the software shows the power spectrum of the first four instantaneous amplitudes of the PF component obtained after the vibration signal is decomposed by the CKF, from A1, A2, A3 power spectrum can be seen in the characteristic frequency of the inner ring fault is 138.4Hz. Figure 9, Figure 10, and Figure 11 show the PF1 component diagram, the A1 component diagram, and the A1-A4 power spectrum enlargement diagrams of the outer ring fault vibration signal, respectively.
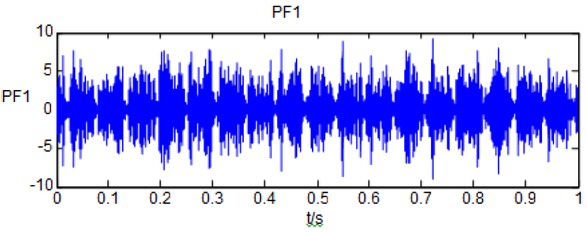
PF1 component diagram of rolling element failure
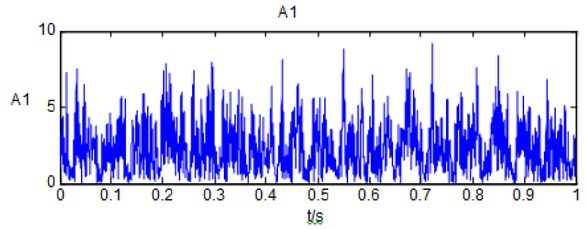
A1 component diagram of rolling element failure
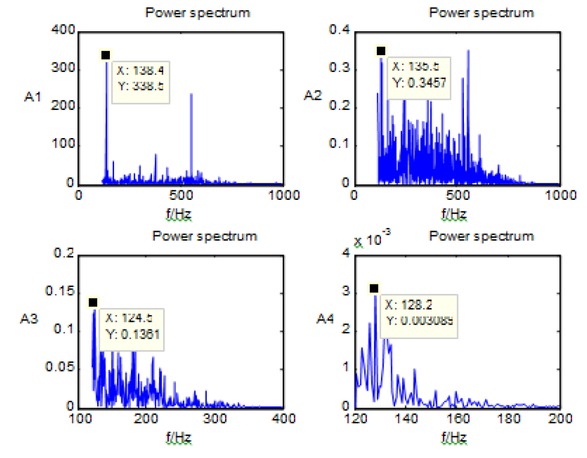
Enlarged power spectrum of rolling element faults A1, A2, A3 and A4
From Figure 11, it can be seen that the characteristic frequency extracted from the power spectrum obtained by decomposing the signal through the CKF is 138.4 Hz, while the theoretical frequency calculated from the bearing parameters of the test data is 137.5 Hz, and the error rate is 0.66%. Therefore, it can be accurately determined that this fault is an inner ring fault, which is consistent with the theory [21]. From the vibration signal analysis software A power spectrum, we can see that A1 power spectrum contains the frequency of the fault feature at the same time, which also contains some of the frequency. A2 power spectrum also contains the fault feature frequency with frequency multiplication. However, it contains a large amount of noise; the A3 and A4 power spectra do not include the characteristic frequency, and there are many frequency noises [7]. Therefore, by comparison, the power spectrum of the instantaneous amplitude A1 of the PF1 component works best. This may be because the first PF component completely reflects the intrinsic nature of the signal, while the other PF components are separated by the first component.
4 Conclusion
The CKF algorithm is used in a bearing fault diagnosis and estimation system composed of low precision, high-noise sensors, and the test data has repeatedly verified by the bearing spreader model. The test results show that the CKF algorithm can observe the sensor noise and the attitude disturbance noise. This article summarizes and draws on previous research results. Based on this, the local mean value decomposition has introduced into the fault diagnosis of rolling bearings. The fault characteristics of the vibration signal of rolling bearings are studied. In order to facilitate the analysis, the signal analysis software based on the CKF algorithm has designed by the MATLAB GUI tool for the actual bearing vibration signal. Through the study of this paper, we can draw the following conclusions as follows.
CKF is an adaptive time-frequency analysis method. This method can decompose complex multicomponent AM/FM signals into the sum of several PF components with instantaneous physical meaning. It is very suitable for processing multicomponent AM/FM signals through other methods. The comparison of time-frequency analysis methods reflects the superiority of this method.
Through the CKF decomposition of the vibration signal of the rolling bearing, the PF component has obtained, and then the power spectrum of the instantaneous amplitude is obtained, so that the fault characteristic frequency can be obtained for finding the fault point of the rolling bearing.
Combining the CKF algorithm with the MATLAB GUI, the fault diagnosis software for rolling bearings can be designed, the vibration signal is decomposed by CKF, and then its characteristic frequency is extracted to determine the fault point of the rolling bearing.
Acknowledgement
The authors declare that there is no conflict of interest regarding the publication of this paper. This work was supported by the National Natural Science Foundation of China (61403229,61503213,61403218), Natural Science Foundation of Zhejiang Province (LQ17F030005).
References
[1] Liu H., Wu W., Strong Tracking Spherical Simplex-Radial Cubature Kalman Filter for Maneuvering Target Tracking, J. Sensors., 2017,17(4), 741.10.3390/s17040741Search in Google Scholar PubMed PubMed Central
[2] Kowsari E., Safarinejadian B., Zarei J., Non-parametric fault detection methods in non-linear systems, J. IET Science, Measurement & Technology., 2016,10(3), 167-176.10.1049/iet-smt.2015.0010Search in Google Scholar
[3] Zarei J., Shokri E., Robust sensor fault detection based on nonlinear unknown input observer. J. Measurement., 2014, 48, 355-367.10.1016/j.measurement.2013.11.015Search in Google Scholar
[4] Zhang A., Bao S., Bi W., Yuan Y., Low-cost adaptive square-root cubature Kalman filter for systems with process model uncertainty. J. Journal of Systems Engineering and Electronics.,2016, 27(5), 945-953.10.21629/JSEE.2016.05.01Search in Google Scholar
[5] Brown T., Du S., Eruslu H., et al. Analysis of models for viscoelastic wave propagation,J. Applied Mathematics & Nonlinear Sciences., 2018, 3(1):55-96.10.21042/AMNS.2018.1.00006Search in Google Scholar
[6] Khellat F., Khormizi M., A global solution for a reaction-diffusion equation on bounded domains,J. Applied Mathematics & Nonlinear Sciences.,2018, 3(1): 15-22.10.21042/AMNS.2018.1.00002Search in Google Scholar
[7] Li X., Duan F., Mba D., Bennett I., Multidimensional prognostics for rotating machinery: A review,J. Advances in Mechanical Engineering.,2017, 9(2), 1687814016685004.10.1177/1687814016685004Search in Google Scholar
[8] Bian M., Wang J., Liu W., Qiu K., Robust and reliable estimation via recursive nonlinear dynamic data reconciliation based on cubature Kalman filter, J. Cluster Computing., 2017,20(4), 2919-2929.10.1007/s10586-017-0926-0Search in Google Scholar
[9] Al-Shabi M., Sigma-Point Filters in Robotic Applications, J. Intelligent Control and Automation.,2015, 6(03), 168.10.4236/ica.2015.63017Search in Google Scholar
[10] Shi Y., Che L., G, Q.,Zhou X., Adaptive high-degree Cubature Kalman filter with unknown noise statistics, J. JOURNAL OF INFORMATION & COMPUTATIONAL SCIENCE., 2014, 11(18), 6703-6712.10.12733/jics20105083Search in Google Scholar
[11] Wang S., Zhang W., Yin C., Feng Y., Huber-based Unscented Kalman Filters with the q-gradient, J. IET Science, Measurement & Technology.,2017, 11(4), 380-387.10.1049/iet-smt.2016.0308Search in Google Scholar
[12] Li H., An improved square root cubature particle filter for navigation, J. International Journal of Hybrid Information Technology.,2014, 7(6), 453-462.10.14257/ijhit.2014.7.6.39Search in Google Scholar
[13] Wang L., Liang Y., Wang X., Xu L., Gaussian sum filter of Markov jump non-linear systems, J. IET Signal Processing.,2015, 9(4), 335-340.10.1049/iet-spr.2014.0066Search in Google Scholar
[14] Foxlin E., Calloway T., Zhang H., Design and Error Analysis of a Vehicular AR System with Auto-Harmonization, J. IEEE transactions on visualization and computer graphics.,2015, 21(12), 1323-1335.10.1109/TVCG.2015.2481385Search in Google Scholar PubMed
[15] Guo Y., Tharmarasa R., Rajan S., Song T. L., Kirubarajan T., Passive tracking in heavy clutter with sensor location uncertainty, J. IEEE Transactions on Aerospace and Electronic Systems.,2016, 52(4), 1536-1554.10.1109/TAES.2016.140820Search in Google Scholar
[16] Li W., Wang Z., Yuan Y., Guo L., Particle filtering with applications in networked systems: a survey, J. Complex & Intelligent Systems.,2016, 2(4), 293-315.10.1007/s40747-016-0028-2Search in Google Scholar
[17] Havlík J.,Šimandl M.,Straka O., A New Practically Oriented Generation of Nonlinear Filtering Toolbox, J. Ifac Papersonline., 2015, 48(28): 1070-1075.10.1016/j.ifacol.2015.12.273Search in Google Scholar
[18] Giron-Sierra J. M., Kalman Filter, Particle Filter and Other Bayesian Filters, Digital Signal Processing with Matlab Examples, 1rd ed. Volume 3. Springer Singapore, 2017.10.1007/978-981-10-2540-2_1Search in Google Scholar
[19] Roth M., Hendeby G., Gustafsson F., EKF/UKF maneuvering target tracking using coordinated turn models with polar/Cartesian velocity, International Conference on Information Fusion, IEEE, 2014:1-8.Search in Google Scholar
[20] López-Salcedo J. A., Del Peral-Rosado J. A., Seco-Granados, G., Survey on robust carrier tracking techniques, J. IEEE Communications Surveys & Tutorials., 2014, 16(2), 670-688.10.1109/SURV.2013.082713.00228Search in Google Scholar
[21] Alhashimi A., Varagnolo D., Gustafsson T., Calibrating Distance Sensors for Terrestrial Applications Without Groundtruth Information, J. IEEE Sensors Journal., 2017, 17(12):3698-3709.10.1109/JSEN.2017.2697850Search in Google Scholar
© 2018 W. Hailun and A. Martinez, published by De Gruyter
This work is licensed under the Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 License.
Articles in the same Issue
- Regular Articles
- A modified Fermi-Walker derivative for inextensible flows of binormal spherical image
- Algebraic aspects of evolution partial differential equation arising in the study of constant elasticity of variance model from financial mathematics
- Three-dimensional atom localization via probe absorption in a cascade four-level atomic system
- Determination of the energy transitions and half-lives of Rubidium nuclei
- Three phase heat and mass transfer model for unsaturated soil freezing process: Part 1 - model development
- Three phase heat and mass transfer model for unsaturated soil freezing process: Part 2 - model validation
- Mathematical model for thermal and entropy analysis of thermal solar collectors by using Maxwell nanofluids with slip conditions, thermal radiation and variable thermal conductivity
- Constructing analytic solutions on the Tricomi equation
- Feynman diagrams and rooted maps
- New type of chaos synchronization in discrete-time systems: the F-M synchronization
- Unsteady flow of fractional Oldroyd-B fluids through rotating annulus
- A note on the uniqueness of 2D elastostatic problems formulated by different types of potential functions
- On the conservation laws and solutions of a (2+1) dimensional KdV-mKdV equation of mathematical physics
- Computational methods and traveling wave solutions for the fourth-order nonlinear Ablowitz-Kaup-Newell-Segur water wave dynamical equation via two methods and its applications
- Siewert solutions of transcendental equations, generalized Lambert functions and physical applications
- Numerical solution of mixed convection flow of an MHD Jeffery fluid over an exponentially stretching sheet in the presence of thermal radiation and chemical reaction
- A new three-dimensional chaotic flow with one stable equilibrium: dynamical properties and complexity analysis
- Dynamics of a dry-rebounding drop: observations, simulations, and modeling
- Modeling the initial mechanical response and yielding behavior of gelled crude oil
- Lie symmetry analysis and conservation laws for the time fractional simplified modified Kawahara equation
- Solitary wave solutions of two KdV-type equations
- Applying industrial tomography to control and optimization flow systems
- Reconstructing time series into a complex network to assess the evolution dynamics of the correlations among energy prices
- An optimal solution for software testing case generation based on particle swarm optimization
- Optimal system, nonlinear self-adjointness and conservation laws for generalized shallow water wave equation
- Alternative methods for solving nonlinear two-point boundary value problems
- Global model simulation of OH production in pulsed-DC atmospheric pressure helium-air plasma jets
- Experimental investigation on optical vortex tweezers for microbubble trapping
- Joint measurements of optical parameters by irradiance scintillation and angle-of-arrival fluctuations
- M-polynomials and topological indices of hex-derived networks
- Generalized convergence analysis of the fractional order systems
- Porous flow characteristics of solution-gas drive in tight oil reservoirs
- Complementary wave solutions for the long-short wave resonance model via the extended trial equation method and the generalized Kudryashov method
- A Note on Koide’s Doubly Special Parametrization of Quark Masses
- On right-angled spherical Artin monoid of type Dn
- Gas flow regimes judgement in nanoporous media by digital core analysis
- 4 + n-dimensional water and waves on four and eleven-dimensional manifolds
- Stabilization and Analytic Approximate Solutions of an Optimal Control Problem
- On the equations of electrodynamics in a flat or curved spacetime and a possible interaction energy
- New prediction method for transient productivity of fractured five-spot patterns in low permeability reservoirs at high water cut stages
- The collinear equilibrium points in the restricted three body problem with triaxial primaries
- Detection of the damage threshold of fused silica components and morphologies of repaired damage sites based on the beam deflection method
- On the bivariate spectral quasi-linearization method for solving the two-dimensional Bratu problem
- Ion acoustic quasi-soliton in an electron-positron-ion plasma with superthermal electrons and positrons
- Analysis of projectile motion in view of conformable derivative
- Computing multiple ABC index and multiple GA index of some grid graphs
- Terahertz pulse imaging: A novel denoising method by combing the ant colony algorithm with the compressive sensing
- Characteristics of microscopic pore-throat structure of tight oil reservoirs in Sichuan Basin measured by rate-controlled mercury injection
- An activity window model for social interaction structure on Twitter
- Transient thermal regime trough the constitutive matrix applied to asynchronous electrical machine using the cell method
- On the zagreb polynomials of benzenoid systems
- Integrability analysis of the partial differential equation describing the classical bond-pricing model of mathematical finance
- The Greek parameters of a continuous arithmetic Asian option pricing model via Laplace Adomian decomposition method
- Quantifying the global solar radiation received in Pietermaritzburg, KwaZulu-Natal to motivate the consumption of solar technologies
- Sturm-Liouville difference equations having Bessel and hydrogen atom potential type
- Study on the response characteristics of oil wells after deep profile control in low permeability fractured reservoirs
- Depiction and analysis of a modified theta shaped double negative metamaterial for satellite application
- An attempt to geometrize electromagnetism
- Structure of traveling wave solutions for some nonlinear models via modified mathematical method
- Thermo-convective instability in a rotating ferromagnetic fluid layer with temperature modulation
- Construction of new solitary wave solutions of generalized Zakharov-Kuznetsov-Benjamin-Bona-Mahony and simplified modified form of Camassa-Holm equations
- Effect of magnetic field and heat source on Upper-convected-maxwell fluid in a porous channel
- Physical cues of biomaterials guide stem cell fate of differentiation: The effect of elasticity of cell culture biomaterials
- Shooting method analysis in wire coating withdrawing from a bath of Oldroyd 8-constant fluid with temperature dependent viscosity
- Rank correlation between centrality metrics in complex networks: an empirical study
- Special Issue: The 18th International Symposium on Electromagnetic Fields in Mechatronics, Electrical and Electronic Engineering
- Modeling of electric and heat processes in spot resistance welding of cross-wire steel bars
- Dynamic characteristics of triaxial active control magnetic bearing with asymmetric structure
- Design optimization of an axial-field eddy-current magnetic coupling based on magneto-thermal analytical model
- Thermal constitutive matrix applied to asynchronous electrical machine using the cell method
- Temperature distribution around thin electroconductive layers created on composite textile substrates
- Model of the multipolar engine with decreased cogging torque by asymmetrical distribution of the magnets
- Analysis of spatial thermal field in a magnetic bearing
- Use of the mathematical model of the ignition system to analyze the spark discharge, including the destruction of spark plug electrodes
- Assessment of short/long term electric field strength measurements for a pilot district
- Simulation study and experimental results for detection and classification of the transient capacitor inrush current using discrete wavelet transform and artificial intelligence
- Magnetic transmission gear finite element simulation with iron pole hysteresis
- Pulsed excitation terahertz tomography – multiparametric approach
- Low and high frequency model of three phase transformer by frequency response analysis measurement
- Multivariable polynomial fitting of controlled single-phase nonlinear load of input current total harmonic distortion
- Optimal design of a for middle-low-speed maglev trains
- Eddy current modeling in linear and nonlinear multifilamentary composite materials
- The visual attention saliency map for movie retrospection
- AC/DC current ratio in a current superimposition variable flux reluctance machine
- Influence of material uncertainties on the RLC parameters of wound inductors modeled using the finite element method
- Cogging force reduction in linear tubular flux switching permanent-magnet machines
- Modeling hysteresis curves of La(FeCoSi)13 compound near the transition point with the GRUCAD model
- Electro-magneto-hydrodynamic lubrication
- 3-D Electromagnetic field analysis of wireless power transfer system using K computer
- Simplified simulation technique of rotating, induction heated, calender rolls for study of temperature field control
- Design, fabrication and testing of electroadhesive interdigital electrodes
- A method to reduce partial discharges in motor windings fed by PWM inverter
- Reluctance network lumped mechanical & thermal models for the modeling and predesign of concentrated flux synchronous machine
- Special Issue Applications of Nonlinear Dynamics
- Study on dynamic characteristics of silo-stock-foundation interaction system under seismic load
- Microblog topic evolution computing based on LDA algorithm
- Modeling the creep damage effect on the creep crack growth behavior of rotor steel
- Neighborhood condition for all fractional (g, f, n′, m)-critical deleted graphs
- Chinese open information extraction based on DBMCSS in the field of national information resources
- 10.1515/phys-2018-0079
- CPW-fed circularly-polarized antenna array with high front-to-back ratio and low-profile
- Intelligent Monitoring Network Construction based on the utilization of the Internet of things (IoT) in the Metallurgical Coking Process
- Temperature detection technology of power equipment based on Fiber Bragg Grating
- Research on a rotational speed control strategy of the mandrel in a rotary steering system
- Dynamic load balancing algorithm for large data flow in distributed complex networks
- Super-structured photonic crystal fiber Bragg grating biosensor image model based on sparse matrix
- Fractal-based techniques for physiological time series: An updated approach
- Analysis of the Imaging Characteristics of the KB and KBA X-ray Microscopes at Non-coaxial Grazing Incidence
- Application of modified culture Kalman filter in bearing fault diagnosis
- Exact solutions and conservation laws for the modified equal width-Burgers equation
- On topological properties of block shift and hierarchical hypercube networks
- Elastic properties and plane acoustic velocity of cubic Sr2CaMoO6 and Sr2CaWO6 from first-principles calculations
- A note on the transmission feasibility problem in networks
- Ontology learning algorithm using weak functions
- Diagnosis of the power frequency vacuum arc shape based on 2D-PIV
- Parametric simulation analysis and reliability of escalator truss
- A new algorithm for real economy benefit evaluation based on big data analysis
- Synergy analysis of agricultural economic cycle fluctuation based on ant colony algorithm
- Multi-level encryption algorithm for user-related information across social networks
- Multi-target tracking algorithm in intelligent transportation based on wireless sensor network
- Fast recognition method of moving video images based on BP neural networks
- Compressed sensing image restoration algorithm based on improved SURF operator
- Design of load optimal control algorithm for smart grid based on demand response in different scenarios
- Face recognition method based on GA-BP neural network algorithm
- Optimal path selection algorithm for mobile beacons in sensor network under non-dense distribution
- Localization and recognition algorithm for fuzzy anomaly data in big data networks
- Urban road traffic flow control under incidental congestion as a function of accident duration
- Optimization design of reconfiguration algorithm for high voltage power distribution network based on ant colony algorithm
- Feasibility simulation of aseismic structure design for long-span bridges
- Construction of renewable energy supply chain model based on LCA
- The tribological properties study of carbon fabric/ epoxy composites reinforced by nano-TiO2 and MWNTs
- A text-Image feature mapping algorithm based on transfer learning
- Fast recognition algorithm for static traffic sign information
- Topical Issue: Clean Energy: Materials, Processes and Energy Generation
- An investigation of the melting process of RT-35 filled circular thermal energy storage system
- Numerical analysis on the dynamic response of a plate-and-frame membrane humidifier for PEMFC vehicles under various operating conditions
- Energy converting layers for thin-film flexible photovoltaic structures
- Effect of convection heat transfer on thermal energy storage unit
Articles in the same Issue
- Regular Articles
- A modified Fermi-Walker derivative for inextensible flows of binormal spherical image
- Algebraic aspects of evolution partial differential equation arising in the study of constant elasticity of variance model from financial mathematics
- Three-dimensional atom localization via probe absorption in a cascade four-level atomic system
- Determination of the energy transitions and half-lives of Rubidium nuclei
- Three phase heat and mass transfer model for unsaturated soil freezing process: Part 1 - model development
- Three phase heat and mass transfer model for unsaturated soil freezing process: Part 2 - model validation
- Mathematical model for thermal and entropy analysis of thermal solar collectors by using Maxwell nanofluids with slip conditions, thermal radiation and variable thermal conductivity
- Constructing analytic solutions on the Tricomi equation
- Feynman diagrams and rooted maps
- New type of chaos synchronization in discrete-time systems: the F-M synchronization
- Unsteady flow of fractional Oldroyd-B fluids through rotating annulus
- A note on the uniqueness of 2D elastostatic problems formulated by different types of potential functions
- On the conservation laws and solutions of a (2+1) dimensional KdV-mKdV equation of mathematical physics
- Computational methods and traveling wave solutions for the fourth-order nonlinear Ablowitz-Kaup-Newell-Segur water wave dynamical equation via two methods and its applications
- Siewert solutions of transcendental equations, generalized Lambert functions and physical applications
- Numerical solution of mixed convection flow of an MHD Jeffery fluid over an exponentially stretching sheet in the presence of thermal radiation and chemical reaction
- A new three-dimensional chaotic flow with one stable equilibrium: dynamical properties and complexity analysis
- Dynamics of a dry-rebounding drop: observations, simulations, and modeling
- Modeling the initial mechanical response and yielding behavior of gelled crude oil
- Lie symmetry analysis and conservation laws for the time fractional simplified modified Kawahara equation
- Solitary wave solutions of two KdV-type equations
- Applying industrial tomography to control and optimization flow systems
- Reconstructing time series into a complex network to assess the evolution dynamics of the correlations among energy prices
- An optimal solution for software testing case generation based on particle swarm optimization
- Optimal system, nonlinear self-adjointness and conservation laws for generalized shallow water wave equation
- Alternative methods for solving nonlinear two-point boundary value problems
- Global model simulation of OH production in pulsed-DC atmospheric pressure helium-air plasma jets
- Experimental investigation on optical vortex tweezers for microbubble trapping
- Joint measurements of optical parameters by irradiance scintillation and angle-of-arrival fluctuations
- M-polynomials and topological indices of hex-derived networks
- Generalized convergence analysis of the fractional order systems
- Porous flow characteristics of solution-gas drive in tight oil reservoirs
- Complementary wave solutions for the long-short wave resonance model via the extended trial equation method and the generalized Kudryashov method
- A Note on Koide’s Doubly Special Parametrization of Quark Masses
- On right-angled spherical Artin monoid of type Dn
- Gas flow regimes judgement in nanoporous media by digital core analysis
- 4 + n-dimensional water and waves on four and eleven-dimensional manifolds
- Stabilization and Analytic Approximate Solutions of an Optimal Control Problem
- On the equations of electrodynamics in a flat or curved spacetime and a possible interaction energy
- New prediction method for transient productivity of fractured five-spot patterns in low permeability reservoirs at high water cut stages
- The collinear equilibrium points in the restricted three body problem with triaxial primaries
- Detection of the damage threshold of fused silica components and morphologies of repaired damage sites based on the beam deflection method
- On the bivariate spectral quasi-linearization method for solving the two-dimensional Bratu problem
- Ion acoustic quasi-soliton in an electron-positron-ion plasma with superthermal electrons and positrons
- Analysis of projectile motion in view of conformable derivative
- Computing multiple ABC index and multiple GA index of some grid graphs
- Terahertz pulse imaging: A novel denoising method by combing the ant colony algorithm with the compressive sensing
- Characteristics of microscopic pore-throat structure of tight oil reservoirs in Sichuan Basin measured by rate-controlled mercury injection
- An activity window model for social interaction structure on Twitter
- Transient thermal regime trough the constitutive matrix applied to asynchronous electrical machine using the cell method
- On the zagreb polynomials of benzenoid systems
- Integrability analysis of the partial differential equation describing the classical bond-pricing model of mathematical finance
- The Greek parameters of a continuous arithmetic Asian option pricing model via Laplace Adomian decomposition method
- Quantifying the global solar radiation received in Pietermaritzburg, KwaZulu-Natal to motivate the consumption of solar technologies
- Sturm-Liouville difference equations having Bessel and hydrogen atom potential type
- Study on the response characteristics of oil wells after deep profile control in low permeability fractured reservoirs
- Depiction and analysis of a modified theta shaped double negative metamaterial for satellite application
- An attempt to geometrize electromagnetism
- Structure of traveling wave solutions for some nonlinear models via modified mathematical method
- Thermo-convective instability in a rotating ferromagnetic fluid layer with temperature modulation
- Construction of new solitary wave solutions of generalized Zakharov-Kuznetsov-Benjamin-Bona-Mahony and simplified modified form of Camassa-Holm equations
- Effect of magnetic field and heat source on Upper-convected-maxwell fluid in a porous channel
- Physical cues of biomaterials guide stem cell fate of differentiation: The effect of elasticity of cell culture biomaterials
- Shooting method analysis in wire coating withdrawing from a bath of Oldroyd 8-constant fluid with temperature dependent viscosity
- Rank correlation between centrality metrics in complex networks: an empirical study
- Special Issue: The 18th International Symposium on Electromagnetic Fields in Mechatronics, Electrical and Electronic Engineering
- Modeling of electric and heat processes in spot resistance welding of cross-wire steel bars
- Dynamic characteristics of triaxial active control magnetic bearing with asymmetric structure
- Design optimization of an axial-field eddy-current magnetic coupling based on magneto-thermal analytical model
- Thermal constitutive matrix applied to asynchronous electrical machine using the cell method
- Temperature distribution around thin electroconductive layers created on composite textile substrates
- Model of the multipolar engine with decreased cogging torque by asymmetrical distribution of the magnets
- Analysis of spatial thermal field in a magnetic bearing
- Use of the mathematical model of the ignition system to analyze the spark discharge, including the destruction of spark plug electrodes
- Assessment of short/long term electric field strength measurements for a pilot district
- Simulation study and experimental results for detection and classification of the transient capacitor inrush current using discrete wavelet transform and artificial intelligence
- Magnetic transmission gear finite element simulation with iron pole hysteresis
- Pulsed excitation terahertz tomography – multiparametric approach
- Low and high frequency model of three phase transformer by frequency response analysis measurement
- Multivariable polynomial fitting of controlled single-phase nonlinear load of input current total harmonic distortion
- Optimal design of a for middle-low-speed maglev trains
- Eddy current modeling in linear and nonlinear multifilamentary composite materials
- The visual attention saliency map for movie retrospection
- AC/DC current ratio in a current superimposition variable flux reluctance machine
- Influence of material uncertainties on the RLC parameters of wound inductors modeled using the finite element method
- Cogging force reduction in linear tubular flux switching permanent-magnet machines
- Modeling hysteresis curves of La(FeCoSi)13 compound near the transition point with the GRUCAD model
- Electro-magneto-hydrodynamic lubrication
- 3-D Electromagnetic field analysis of wireless power transfer system using K computer
- Simplified simulation technique of rotating, induction heated, calender rolls for study of temperature field control
- Design, fabrication and testing of electroadhesive interdigital electrodes
- A method to reduce partial discharges in motor windings fed by PWM inverter
- Reluctance network lumped mechanical & thermal models for the modeling and predesign of concentrated flux synchronous machine
- Special Issue Applications of Nonlinear Dynamics
- Study on dynamic characteristics of silo-stock-foundation interaction system under seismic load
- Microblog topic evolution computing based on LDA algorithm
- Modeling the creep damage effect on the creep crack growth behavior of rotor steel
- Neighborhood condition for all fractional (g, f, n′, m)-critical deleted graphs
- Chinese open information extraction based on DBMCSS in the field of national information resources
- 10.1515/phys-2018-0079
- CPW-fed circularly-polarized antenna array with high front-to-back ratio and low-profile
- Intelligent Monitoring Network Construction based on the utilization of the Internet of things (IoT) in the Metallurgical Coking Process
- Temperature detection technology of power equipment based on Fiber Bragg Grating
- Research on a rotational speed control strategy of the mandrel in a rotary steering system
- Dynamic load balancing algorithm for large data flow in distributed complex networks
- Super-structured photonic crystal fiber Bragg grating biosensor image model based on sparse matrix
- Fractal-based techniques for physiological time series: An updated approach
- Analysis of the Imaging Characteristics of the KB and KBA X-ray Microscopes at Non-coaxial Grazing Incidence
- Application of modified culture Kalman filter in bearing fault diagnosis
- Exact solutions and conservation laws for the modified equal width-Burgers equation
- On topological properties of block shift and hierarchical hypercube networks
- Elastic properties and plane acoustic velocity of cubic Sr2CaMoO6 and Sr2CaWO6 from first-principles calculations
- A note on the transmission feasibility problem in networks
- Ontology learning algorithm using weak functions
- Diagnosis of the power frequency vacuum arc shape based on 2D-PIV
- Parametric simulation analysis and reliability of escalator truss
- A new algorithm for real economy benefit evaluation based on big data analysis
- Synergy analysis of agricultural economic cycle fluctuation based on ant colony algorithm
- Multi-level encryption algorithm for user-related information across social networks
- Multi-target tracking algorithm in intelligent transportation based on wireless sensor network
- Fast recognition method of moving video images based on BP neural networks
- Compressed sensing image restoration algorithm based on improved SURF operator
- Design of load optimal control algorithm for smart grid based on demand response in different scenarios
- Face recognition method based on GA-BP neural network algorithm
- Optimal path selection algorithm for mobile beacons in sensor network under non-dense distribution
- Localization and recognition algorithm for fuzzy anomaly data in big data networks
- Urban road traffic flow control under incidental congestion as a function of accident duration
- Optimization design of reconfiguration algorithm for high voltage power distribution network based on ant colony algorithm
- Feasibility simulation of aseismic structure design for long-span bridges
- Construction of renewable energy supply chain model based on LCA
- The tribological properties study of carbon fabric/ epoxy composites reinforced by nano-TiO2 and MWNTs
- A text-Image feature mapping algorithm based on transfer learning
- Fast recognition algorithm for static traffic sign information
- Topical Issue: Clean Energy: Materials, Processes and Energy Generation
- An investigation of the melting process of RT-35 filled circular thermal energy storage system
- Numerical analysis on the dynamic response of a plate-and-frame membrane humidifier for PEMFC vehicles under various operating conditions
- Energy converting layers for thin-film flexible photovoltaic structures
- Effect of convection heat transfer on thermal energy storage unit