
Chaos and bifurcation in the controlled chaotic system
-
Yongjian Liu
 ,
Xiezhen Huang
,
Xiezhen Huang

Abstract
In this paper, chaos and bifurcation are explored for the controlled chaotic system, which is put forward based on the hybrid strategy in an unusual chaotic system. Behavior of the controlled system with variable parameter is researched in detain. Moreover, the normal form theory is used to analyze the direction and stability of bifurcating periodic solution.
1 Introduction
In 1963, the first three dimensional autonomous chaotic system (Lorenz system) was proposed in the literature [1]. After that, the construction and theoretical research of the chaotic system have become a hot issue in the nonlinear science. What is more, many three-dimensional chaotic systems have been put forward one after another, including Chen system [2] and Lu¨ system [3], which have to be mentioned. In the sense of literature [4], Chen system is the dual system of Lorenz system, whereas Lu¨system acts as a bridge between the both. In 1994, with the aid of a computer, Sprott has found 19 three-dimensional chaotic systems [5]. Ro¨ssler system [6] and Chua system [7] have also received widespread attention from scholars. More about the contents of chaotic systems can be seen in the literature [8, 9, 10, 11]. For most 3D systems, there may be only one equilibrium point, two symmetric equilibrium points, three equilibrium points or even more, their common features are that all of the equilibria are unstable [12]. In 2008, Yang and Chen [13] introduced a chaotic system [14] with a saddle point and two stable node-foci. Wei and Yang introduced a class of chaotic systems with only two stable equilibria [15]. In particular, the above mentioned chaotic systems have a common characteristic: the total stability of the two symmetric equilibria is always the same. Bifurcation analysis and control is one of the most popular research theme in the domain of bifurcation control [16, 17, 18, 19, 20, 21].
Liu et al. [22] gave a new 3D chaotic system as follows:
There are only two nonlinear terms on the right side of the system, which is simple, but the local dynamic behavior is complex and interesting. There is a pair of equilibrium points in the system, whose positions are symmetric but the stability is opposite. The nature of this new chaotic system has attracted extensive interest [23–26]. In this article, we design a hybrid strategy which consists of a parameter and a state feedback , and it is added to the last system, and we can get the controlled chaotic system as follows:
Apparently, this strategy not only ensures that the equilibrium structure and the dimension of the original system are unchanged. To analyze complex dynamical behaviors of the controlled system and evaluate differences of chaos between the original system and controlled system, we study the chaos and bifurcation of the controlled system through analyzing the variable parameter. First, phase trajectories, Lyapunove exponents and bifurcation path are numerically investigated. Chaotic area, period area and several periodic windows within the range of control parameter in controlled system are found. Then a sufficient condition for the existence of Hopf bifurcation of controlled system are given. The next theorem describes following details: the existence and expression of the bifurcation periodic solutions are explored, and the stability, direction and the period size also are studied.
The remainder of the article is arranged as follows: In section 2, hybrid control strategy of Hopf bifurcation is examined. In section 3, bifurcation diagrams and Lyapunov exponents of the controlled system with varying parameter m are analyzed in detail. The Hopf bifurcation and its periodic solution of the controlled system are explored in section 4. Finally, section 5 is summing up the full text.
2 Hybrid control strategy
For the convenience of description, the original system proposed in [22] as follows:
when parameters a(a > 0), b and c are all real constants, and x, y, z are three state variables in this case. Apparently, when c = 0, system (2.1) is invariant while it is under the transformation T(x, y, z) → T(−x, −y, z). In the sense of this transformation, the system not itself invariant under the T transformation, and there is another orbit that corresponds to it. We calculate the next formulas:
a(y − x) = 0,−c + xz = 0, b − y2 = 0.
It is easily obtained that if b2 + c2 = 0, there are non-isolated equilibria Oz(0,0, z); if either b < 0 or b = 0 and c ≠ 0, there is not an equilibrium; if b > 0, there are two equilibria
In this part, based on the model (2.1), we design a controller to get the controlled system as below
As needed, we only have to control the second equation, and the other two equations remain unchanged. Obviously, the characteristic of the control law is to ensure that the structure of the equilibrium and the dimension of the original system (2.1) are unchanged. Especially, if m = 0, the controlled system will restore to the original system.
The linearized system (2.2) acts at E±, and we can get the Jacobian matrix
its characteristic equation being
Regarding the controlled system, we conclude that if
We just analyse the stability of equilibrium E+. By using the Routh-Hurwitz criterion, we can easily prove the equilibrium E+ is stable while
The formula (2.3) at equilibrium E+ is just as follows:
Let
3 Complex dynamic behavior
To research and investigate the dynamic behaviors of the controlled system (2.2), a host of numerical simulations are carried out. The obtained results reveal that the controlled system (2.2) exhibits very significant and complex dynamical behaviors.
In this part, we fix a = 1.5, b = 1.7, c = 0.05, while varying m ∈ [−1.6,0.27]. By analyzing Lyapunov exponents spectrum and corresponding bifurcation diagram for (2) just as manifested in Fig. 1 and Fig. 2, one can get the following conclusions.
![Fig. 1 The Lyapunov exponents spectrum of system (2.2) with a = 1.5, b = 1.7, c = 0.05 and m ∈ [−1.6, 0.27].](/document/doi/10.1515/math-2018-0105/asset/graphic/j_math-2018-0105_fig_001.jpg)
The Lyapunov exponents spectrum of system (2.2) with a = 1.5, b = 1.7, c = 0.05 and m ∈ [−1.6, 0.27].
![Fig. 2 Bifurcation diagram of system (2.2) with a = 1.5, b = 1.7, c = 0.05 and m ∈ [−1.6, 0.27].](/document/doi/10.1515/math-2018-0105/asset/graphic/j_math-2018-0105_fig_002.jpg)
Bifurcation diagram of system (2.2) with a = 1.5, b = 1.7, c = 0.05 and m ∈ [−1.6, 0.27].
(1) When the parameters m ∈ [−1.6,−1.52] and m ∈ [−1.5,−1.49], the controlled system of maximum Lyapunov exponent is often equal to zero here. System (2.2) keeps periodic motion.
(2) When the parameters m = −1.51, there are two Lyapunov exponents equal to zero. Combining with the phase portrait shown in Fig.3, it easily seen that the controlled system performs a quasi periodic motion.

The phase diagram of system (2.2) with a = 1.5, a = 1.7, a = 0.05 and a = −1.51.
(3) When the parameters m ∈ [−1.48,−1.44], m ∈ [−1.42,−1.37] and m ∈ [−1.35,0.01], their maximum Lyapunov exponents are positive exponents; the fact indicates that the controlled system is chaotic.
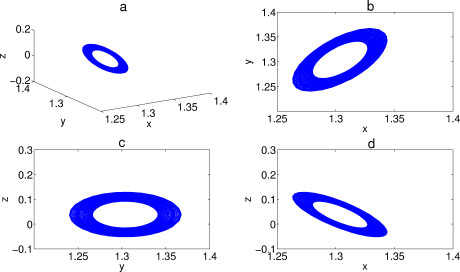
(4) When the parameters m = −1.43, m = −1.36 and m = 0.02, their corresponding maximum Lyapunov exponents all are equal to zero. The controlled system performs a periodic motion. The phase portraits are shown in Figs.4, 5 and 6.

The phase diagram of system (2.2) with a = 1.5, b = 1.7, c = 0.05 and m = −1.43.

The phase diagram of system (2.2) with a = 1.5, b = 1.7, c = 0.05 and m = −1.36.
The phase diagram of system (2.2) with a = 1.5, b = 1.7, m = 0.02 and c = 0.05.
(5) When the parameter m ∈ [0.03,0.27], the controlled system keeps a cycle motion. The cycle gets lower as the parameter m increases, and the maximum Lyapunov exponents are always kept negative and get smaller, which implies that the controlled system tends to converge to a sink.
From the above results, we can find that, within m ∈ [−1.6,0.27], controlled system (2.2) has chaotic attractor, period montion and periodic windows. The behaviors of the system (2.2) become complex with varying m [22].
4 Hopf bifurcation analysis
In this part we discuss the Hopf bifurcation for the controlled system (2.2), applying normal form theory and Mathemaitca software.
Theorem 4.1
Suppose that
Proof
Suppose that there is a pair of pure imaginary roots λ = ±iω(ω ∈ ℝ+) in characteristic equation.
We obtained
Hence one can see that
Thus we have
Then
By computing the equation, we get
When c = c0, one obtains
where
From m > 0, it follows that
which indicates that
Remark 4.2
There is no Hopf bifurcation at the equilibrium
Next, the expression, stability and size of bifurcating period solution in system (2.2) are studied, by using the normal form theory [27] and many rigid symbolic computation.
Theorem 4.3
If a > 0, b > 0, for the controlled system (2.2), bifurcating periodic solutions exist for sufficient small
if M > 0, bifurcating periodic solutions of system (2.2) at
if M < 0, bifurcating periodic solutions of system (2.2) at
the characteristic exponent and period of the bifurcating periodic solution are
where
Qi (i = 1,2,3, ⋯ , 6), and A13, A23, B13, B23, B13,, are defined in Appendix.
(iv) the mathematical expression of Hopf bifurcation periodic solution of system (2.2) is
Qi (i = 1,2,3, ⋯ ,6) are defined in Appendix.
Proof
According to Theorem 4.1, while the parameter c changes and passes through the critical value c0, Hopf bifurcation occurs at the equilibrium point E+, and its direction and stability are discussed below.
Because equilibrium
Denoting
and according to the matrix calculated above, we can get its characteristic equation:
By exact computations, we obtain λ1 = ωi, λ2 = −ωi and λ3 = −a − m, when
For system (2.2), define
and make a transformation as follows:
Thus,
where
Furthermore, the following marks are consistent with [\cite{x}].
Meanwhile, one has
Solving the following formula:
where D = −(a + m), one obtains
Where,
Furthermore,
where
Considering the above operation results, one can calculate the following formulas and get:
where
From a > 0, b > 0, one gets that α′(0) < 0, ω′(0) < 0 holds, so there are μ2 > 0 and β2 > 0with M > 0, which means that the Hopf bifurcation of system (2.2) at E+(b√, b√,cb√) is supercritical and non-degenerate, and the system's bifurcating periodic solution occurs and is unstable; if M < 0, then μ2 < 0 and β2 < 0, which means that the Hopf bifurcation of system (2.2) at
Moreover, the characteristic exponent and period are
where
while P˜1 is a matrix and is described in (3.1),
and
By complicate computations, one gets
where γ1, γ2 are defined at Theorem 4.3.
Remark 4.4
The property of Hopf bifurcation at equilibriumE−can be considered in the same way.
Fix a = 5, b = 1.7, m = − 1 and the critical value
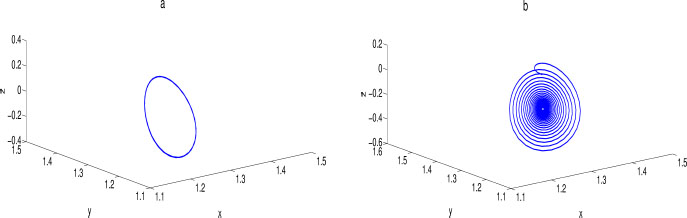
(a) The phase diagram of system (2.2) with a = 5, b = 1.7, m = –1 and c = –0.22. (b) The phase diagram of system (2.2) with a = 5, b = 1.7, m = –1 and c = –0.32.
5 Conclusions
In this paper the chaos and bifurcation are explored for the controlled chaotic system, which is put forward based on the hybrid strategy in an unusual chaotic system. Behaviors of the controlled system are studied through analyzing its corresponding bifurcation diagrams and Lyapunov exponents, showing that there exist chaotic area, period area and several periodic windows within the range of variable parameter. The results show that the controlled system maintains the local structure and dimension of the original system, and the dynamics behavior of the controlled system is much richer than the original system. Furthermore, a sufficient condition for the existence of Hopf bifurcation of the controlled chaotic system is obtained. Using the normal form theory, the direction and stability of bifurcating periodic solution are verified. Numerical simulations demonstrate the theoretical analysis results.
Appendix
For convenience, some values of the symbols used in Theorem 4.3 are given in this section.
Acknowledgement
The authors wish to thank the reviewers for their constructive and pertinent suggestions for improving the presentation of the work. This work was supported by the National Natural Science Foundation of China (Grant No. 11561069), the Guangxi Natural Science Foundation of China (Grant Nos. 2016GXNSFBA380170, 2017GXNSFAA198234) and the Guangxi University High Level Innovation Team and Distinguished Scholars Program of China (Document No. [2018] 35).
References
[1] Lorenz E.N., Deterministic nonperiodic flow. Journal of Atmospheric Sciences, 1963, 20, 130-141.10.1175/1520-0469(1963)020<0130:DNF>2.0.CO;2Search in Google Scholar
[2] Chen G., Ueta T., Yet another chaotic attractor. International Journal of Bifurcation and Chaos, 1999, 9, 1465-1466.10.1142/S0218127499001024Search in Google Scholar
[3] Lü J., Chen G., A new chaotic attractor coined. International Journal of Bifurcation and Chaos, 2002, 12, 659-661.10.1142/S0218127402004620Search in Google Scholar
[4] Vaněč A., Čelikovský S., Control systems: from linear analysis to synthesis of chaos. Prentice Hall International (UK) Ltd, 1996, 4, 1479-1480.Search in Google Scholar
[5] Sprott J.C., Some simple chaotic flows, Physical review E, 1994, 50, R647-R650.10.1103/PhysRevE.50.R647Search in Google Scholar
[6] Rösler O.E., An equation for continuous chaos. Physics Letters A, 1976, 57, 397-398.10.1016/0375-9601(76)90101-8Search in Google Scholar
[7] Chua L.O., Matsumoto T., Komuro M., The double scroll family. IEEE Transactions on Circuits and Systems I-Fundamental Theory and Applications, 1985, 32, 798-818.10.1109/TCS.1985.1085791Search in Google Scholar
[8] Qi G., Chen G., Du S., et al., Analysis of a new chaotic system. Physica A Statistical Mechanics and Its Applications, 2005, 352, 295-308.10.1016/j.physa.2004.12.040Search in Google Scholar
[9] Sundarapandian V., Pehlivan I., Analysis, control, synchronization, and circuit design of a novel chaotic system. Mathematical and Computer Modelling, 2012, 55, 1904-1915.10.1016/j.mcm.2011.11.048Search in Google Scholar
[10] Pehlivan I., Uyaroglu Y., A new 3D chaotic system with golden proportion equilibria: Analysis and electronic circuit realization. Computers and Electrical Engineering, 2012, 38, 1777-1784.10.1016/j.compeleceng.2012.08.007Search in Google Scholar
[11] Wei Z., Moroz I., Wang Z., Zhang W., Detecting hidden chaotic regions and complex dynamics in the self-exciting homopolar disc dynamo. International Journal of Bifurcation and Chaos, 2017, 27, 1730008.10.1142/S0218127417300087Search in Google Scholar
[12] Čelikovský S., Chen G., On a generalized Lorenz canonical form of chaotic systems. International Journal of Bifurcation and Chaos, 2002, 12, 1789-1812.10.1142/S0218127402005467Search in Google Scholar
[13] Yang Q., Chen G., A chaotic system with one saddle and two stable node-foci. International Journal of Bifurcation and Chaos, 2008, 18, 1393-1414.10.1142/S0218127408021063Search in Google Scholar
[14] Yang Q., Wei Z., Chen G., An unusual 3D autonomous quadratic chaotic system with two stable node-foci. International Journal of Bifurcation and Chaos, 2010, 20, 1061-1083.10.1142/S0218127410026320Search in Google Scholar
[15] Wei Z., Yang Q., Dynamical analysis of a new autonomous 3-D chaotic system only with stable equilibria. Nonlinear Analysis: Real World Applications, 2011, 12, 106-118.10.1016/j.nonrwa.2010.05.038Search in Google Scholar
[16] Cai P., Tang J., Li Z., Controlling Hopf bifurcation of a new modified hyperchaotic L system. Mathematical Problems in Engineering, 2015.10.1155/2015/614135Search in Google Scholar
[17] Cai P., Tang J., Li Z., Analysis and controlling of Hopf bifurcation for chaotic van der Pol-Duffing system. Mathematical and Computational Applications, 2014, 19, 184-193.10.3390/mca19030184Search in Google Scholar
[18] Ding D., Zhang X., Cao J., et al., Bifurcation control of complex networks model via PD controller. Neurocomputing, 2016, 175, 1-9.10.1016/j.neucom.2015.09.094Search in Google Scholar
[19] Cheng Z., Li D., Cao J., Stability and Hopf bifurcation of a three-layer neural network model with delays. Neurocomputing, 2016, 175, 355-370.10.1016/j.neucom.2015.10.068Search in Google Scholar
[20] Wei Z., Moroz I., Wang Z., Sprott J.C., Kapitaniak T., Dynamics at infinity, degenerate Hopf and zero-Hopf bifurcation for Kingni-Jafari system with hidden attractors. International Journal of Bifurcation and Chaos, 2016, 26, 1650125.10.1142/S021812741650125XSearch in Google Scholar
[21] Li J., Liu Y., Wei Z., Zero-hopf bifurcation and Hopf bifurcation for smooth Chua's System. Advances in Difference Equations, 2018, 141.10.1186/s13662-018-1597-8Search in Google Scholar
[22] Liu Y., Pang S., Chen D., An unusual chaotic system and its control. Mathematical and Computer Modelling, 2013, 57, 2473-2493.10.1016/j.mcm.2012.12.006Search in Google Scholar
[23] Geng F., Li X., Singular orbits and dynamics at infinity of a conjugate Lorenz-like system. Mathematical Modelling and Analysis, 2015, 20, 148-167.10.3846/13926292.2015.1019944Search in Google Scholar
[24] Wang H., Li X., New results to a three-dimensional chaotic system with two different kinds of nonisolated equilibria. Journal of Computational and Nonlinear Dynamics, 2015, 10, 161-169.10.1115/1.4030028Search in Google Scholar
[25] Wei Z., Pham V.T., Kapitaniak T., Wang Z., Bifurcation analysis and circuit realization for multiple-delayed Wang-Chen system with hidden chaotic attractors. Nonlinear Dynamics, 2016, 85, 1635-1650.10.1007/s11071-016-2783-4Search in Google Scholar
[26] Guckenheimer J., Holmes P., Nonlinear oscillations, dynamical systems, and bifurcations of vector fields . Physics Today, 1985, 38, 102-105.10.1063/1.2814774Search in Google Scholar
[27] Hassard B.D., Kazarinoff N.D., Wan Y.H., Theory and applications of Hopf bifurcation. Cambridge Univ., London, 1981.Search in Google Scholar
[28] Neuts M.F., Matrix-geometric solutions in stochastic models: an algorithmic approach. Johns Hopkins University Press, 1981.Search in Google Scholar
© 2018 Liu et al., published by De Gruyter
This work is licensed under the Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 License.
Articles in the same Issue
- Regular Articles
- Algebraic proofs for shallow water bi–Hamiltonian systems for three cocycle of the semi-direct product of Kac–Moody and Virasoro Lie algebras
- On a viscous two-fluid channel flow including evaporation
- Generation of pseudo-random numbers with the use of inverse chaotic transformation
- Singular Cauchy problem for the general Euler-Poisson-Darboux equation
- Ternary and n-ary f-distributive structures
- On the fine Simpson moduli spaces of 1-dimensional sheaves supported on plane quartics
- Evaluation of integrals with hypergeometric and logarithmic functions
- Bounded solutions of self-adjoint second order linear difference equations with periodic coeffients
- Oscillation of first order linear differential equations with several non-monotone delays
- Existence and regularity of mild solutions in some interpolation spaces for functional partial differential equations with nonlocal initial conditions
- The log-concavity of the q-derangement numbers of type B
- Generalized state maps and states on pseudo equality algebras
- Monotone subsequence via ultrapower
- Note on group irregularity strength of disconnected graphs
- On the security of the Courtois-Finiasz-Sendrier signature
- A further study on ordered regular equivalence relations in ordered semihypergroups
- On the structure vector field of a real hypersurface in complex quadric
- Rank relations between a {0, 1}-matrix and its complement
- Lie n superderivations and generalized Lie n superderivations of superalgebras
- Time parallelization scheme with an adaptive time step size for solving stiff initial value problems
- Stability problems and numerical integration on the Lie group SO(3) × R3 × R3
- On some fixed point results for (s, p, α)-contractive mappings in b-metric-like spaces and applications to integral equations
- On algebraic characterization of SSC of the Jahangir’s graph 𝓙n,m
- A greedy algorithm for interval greedoids
- On nonlinear evolution equation of second order in Banach spaces
- A primal-dual approach of weak vector equilibrium problems
- On new strong versions of Browder type theorems
- A Geršgorin-type eigenvalue localization set with n parameters for stochastic matrices
- Restriction conditions on PL(7, 2) codes (3 ≤ |𝓖i| ≤ 7)
- Singular integrals with variable kernel and fractional differentiation in homogeneous Morrey-Herz-type Hardy spaces with variable exponents
- Introduction to disoriented knot theory
- Restricted triangulation on circulant graphs
- Boundedness control sets for linear systems on Lie groups
- Chen’s inequalities for submanifolds in (κ, μ)-contact space form with a semi-symmetric metric connection
- Disjointed sum of products by a novel technique of orthogonalizing ORing
- A parametric linearizing approach for quadratically inequality constrained quadratic programs
- Generalizations of Steffensen’s inequality via the extension of Montgomery identity
- Vector fields satisfying the barycenter property
- On the freeness of hypersurface arrangements consisting of hyperplanes and spheres
- Biderivations of the higher rank Witt algebra without anti-symmetric condition
- Some remarks on spectra of nuclear operators
- Recursive interpolating sequences
- Involutory biquandles and singular knots and links
- Constacyclic codes over 𝔽pm[u1, u2,⋯,uk]/〈 ui2 = ui, uiuj = ujui〉
- Topological entropy for positively weak measure expansive shadowable maps
- Oscillation and non-oscillation of half-linear differential equations with coeffcients determined by functions having mean values
- On 𝓠-regular semigroups
- One kind power mean of the hybrid Gauss sums
- A reduced space branch and bound algorithm for a class of sum of ratios problems
- Some recurrence formulas for the Hermite polynomials and their squares
- A relaxed block splitting preconditioner for complex symmetric indefinite linear systems
- On f - prime radical in ordered semigroups
- Positive solutions of semipositone singular fractional differential systems with a parameter and integral boundary conditions
- Disjoint hypercyclicity equals disjoint supercyclicity for families of Taylor-type operators
- A stochastic differential game of low carbon technology sharing in collaborative innovation system of superior enterprises and inferior enterprises under uncertain environment
- Dynamic behavior analysis of a prey-predator model with ratio-dependent Monod-Haldane functional response
- The points and diameters of quantales
- Directed colimits of some flatness properties and purity of epimorphisms in S-posets
- Super (a, d)-H-antimagic labeling of subdivided graphs
- On the power sum problem of Lucas polynomials and its divisible property
- Existence of solutions for a shear thickening fluid-particle system with non-Newtonian potential
- On generalized P-reducible Finsler manifolds
- On Banach and Kuratowski Theorem, K-Lusin sets and strong sequences
- On the boundedness of square function generated by the Bessel differential operator in weighted Lebesque Lp,α spaces
- On the different kinds of separability of the space of Borel functions
- Curves in the Lorentz-Minkowski plane: elasticae, catenaries and grim-reapers
- Functional analysis method for the M/G/1 queueing model with single working vacation
- Existence of asymptotically periodic solutions for semilinear evolution equations with nonlocal initial conditions
- The existence of solutions to certain type of nonlinear difference-differential equations
- Domination in 4-regular Knödel graphs
- Stepanov-like pseudo almost periodic functions on time scales and applications to dynamic equations with delay
- Algebras of right ample semigroups
- Random attractors for stochastic retarded reaction-diffusion equations with multiplicative white noise on unbounded domains
- Nontrivial periodic solutions to delay difference equations via Morse theory
- A note on the three-way generalization of the Jordan canonical form
- On some varieties of ai-semirings satisfying xp+1 ≈ x
- Abstract-valued Orlicz spaces of range-varying type
- On the recursive properties of one kind hybrid power mean involving two-term exponential sums and Gauss sums
- Arithmetic of generalized Dedekind sums and their modularity
- Multipreconditioned GMRES for simulating stochastic automata networks
- Regularization and error estimates for an inverse heat problem under the conformable derivative
- Transitivity of the εm-relation on (m-idempotent) hyperrings
- Learning Bayesian networks based on bi-velocity discrete particle swarm optimization with mutation operator
- Simultaneous prediction in the generalized linear model
- Two asymptotic expansions for gamma function developed by Windschitl’s formula
- State maps on semihoops
- 𝓜𝓝-convergence and lim-inf𝓜-convergence in partially ordered sets
- Stability and convergence of a local discontinuous Galerkin finite element method for the general Lax equation
- New topology in residuated lattices
- Optimality and duality in set-valued optimization utilizing limit sets
- An improved Schwarz Lemma at the boundary
- Initial layer problem of the Boussinesq system for Rayleigh-Bénard convection with infinite Prandtl number limit
- Toeplitz matrices whose elements are coefficients of Bazilevič functions
- Epi-mild normality
- Nonlinear elastic beam problems with the parameter near resonance
- Orlicz difference bodies
- The Picard group of Brauer-Severi varieties
- Galoisian and qualitative approaches to linear Polyanin-Zaitsev vector fields
- Weak group inverse
- Infinite growth of solutions of second order complex differential equation
- Semi-Hurewicz-Type properties in ditopological texture spaces
- Chaos and bifurcation in the controlled chaotic system
- Translatability and translatable semigroups
- Sharp bounds for partition dimension of generalized Möbius ladders
- Uniqueness theorems for L-functions in the extended Selberg class
- An effective algorithm for globally solving quadratic programs using parametric linearization technique
- Bounds of Strong EMT Strength for certain Subdivision of Star and Bistar
- On categorical aspects of S -quantales
- On the algebraicity of coefficients of half-integral weight mock modular forms
- Dunkl analogue of Szász-mirakjan operators of blending type
- Majorization, “useful” Csiszár divergence and “useful” Zipf-Mandelbrot law
- Global stability of a distributed delayed viral model with general incidence rate
- Analyzing a generalized pest-natural enemy model with nonlinear impulsive control
- Boundary value problems of a discrete generalized beam equation via variational methods
- Common fixed point theorem of six self-mappings in Menger spaces using (CLRST) property
- Periodic and subharmonic solutions for a 2nth-order p-Laplacian difference equation containing both advances and retardations
- Spectrum of free-form Sudoku graphs
- Regularity of fuzzy convergence spaces
- The well-posedness of solution to a compressible non-Newtonian fluid with self-gravitational potential
- On further refinements for Young inequalities
- Pretty good state transfer on 1-sum of star graphs
- On a conjecture about generalized Q-recurrence
- Univariate approximating schemes and their non-tensor product generalization
- Multi-term fractional differential equations with nonlocal boundary conditions
- Homoclinic and heteroclinic solutions to a hepatitis C evolution model
- Regularity of one-sided multilinear fractional maximal functions
- Galois connections between sets of paths and closure operators in simple graphs
- KGSA: A Gravitational Search Algorithm for Multimodal Optimization based on K-Means Niching Technique and a Novel Elitism Strategy
- θ-type Calderón-Zygmund Operators and Commutators in Variable Exponents Herz space
- An integral that counts the zeros of a function
- On rough sets induced by fuzzy relations approach in semigroups
- Computational uncertainty quantification for random non-autonomous second order linear differential equations via adapted gPC: a comparative case study with random Fröbenius method and Monte Carlo simulation
- The fourth order strongly noncanonical operators
- Topical Issue on Cyber-security Mathematics
- Review of Cryptographic Schemes applied to Remote Electronic Voting systems: remaining challenges and the upcoming post-quantum paradigm
- Linearity in decimation-based generators: an improved cryptanalysis on the shrinking generator
- On dynamic network security: A random decentering algorithm on graphs
Articles in the same Issue
- Regular Articles
- Algebraic proofs for shallow water bi–Hamiltonian systems for three cocycle of the semi-direct product of Kac–Moody and Virasoro Lie algebras
- On a viscous two-fluid channel flow including evaporation
- Generation of pseudo-random numbers with the use of inverse chaotic transformation
- Singular Cauchy problem for the general Euler-Poisson-Darboux equation
- Ternary and n-ary f-distributive structures
- On the fine Simpson moduli spaces of 1-dimensional sheaves supported on plane quartics
- Evaluation of integrals with hypergeometric and logarithmic functions
- Bounded solutions of self-adjoint second order linear difference equations with periodic coeffients
- Oscillation of first order linear differential equations with several non-monotone delays
- Existence and regularity of mild solutions in some interpolation spaces for functional partial differential equations with nonlocal initial conditions
- The log-concavity of the q-derangement numbers of type B
- Generalized state maps and states on pseudo equality algebras
- Monotone subsequence via ultrapower
- Note on group irregularity strength of disconnected graphs
- On the security of the Courtois-Finiasz-Sendrier signature
- A further study on ordered regular equivalence relations in ordered semihypergroups
- On the structure vector field of a real hypersurface in complex quadric
- Rank relations between a {0, 1}-matrix and its complement
- Lie n superderivations and generalized Lie n superderivations of superalgebras
- Time parallelization scheme with an adaptive time step size for solving stiff initial value problems
- Stability problems and numerical integration on the Lie group SO(3) × R3 × R3
- On some fixed point results for (s, p, α)-contractive mappings in b-metric-like spaces and applications to integral equations
- On algebraic characterization of SSC of the Jahangir’s graph 𝓙n,m
- A greedy algorithm for interval greedoids
- On nonlinear evolution equation of second order in Banach spaces
- A primal-dual approach of weak vector equilibrium problems
- On new strong versions of Browder type theorems
- A Geršgorin-type eigenvalue localization set with n parameters for stochastic matrices
- Restriction conditions on PL(7, 2) codes (3 ≤ |𝓖i| ≤ 7)
- Singular integrals with variable kernel and fractional differentiation in homogeneous Morrey-Herz-type Hardy spaces with variable exponents
- Introduction to disoriented knot theory
- Restricted triangulation on circulant graphs
- Boundedness control sets for linear systems on Lie groups
- Chen’s inequalities for submanifolds in (κ, μ)-contact space form with a semi-symmetric metric connection
- Disjointed sum of products by a novel technique of orthogonalizing ORing
- A parametric linearizing approach for quadratically inequality constrained quadratic programs
- Generalizations of Steffensen’s inequality via the extension of Montgomery identity
- Vector fields satisfying the barycenter property
- On the freeness of hypersurface arrangements consisting of hyperplanes and spheres
- Biderivations of the higher rank Witt algebra without anti-symmetric condition
- Some remarks on spectra of nuclear operators
- Recursive interpolating sequences
- Involutory biquandles and singular knots and links
- Constacyclic codes over 𝔽pm[u1, u2,⋯,uk]/〈 ui2 = ui, uiuj = ujui〉
- Topological entropy for positively weak measure expansive shadowable maps
- Oscillation and non-oscillation of half-linear differential equations with coeffcients determined by functions having mean values
- On 𝓠-regular semigroups
- One kind power mean of the hybrid Gauss sums
- A reduced space branch and bound algorithm for a class of sum of ratios problems
- Some recurrence formulas for the Hermite polynomials and their squares
- A relaxed block splitting preconditioner for complex symmetric indefinite linear systems
- On f - prime radical in ordered semigroups
- Positive solutions of semipositone singular fractional differential systems with a parameter and integral boundary conditions
- Disjoint hypercyclicity equals disjoint supercyclicity for families of Taylor-type operators
- A stochastic differential game of low carbon technology sharing in collaborative innovation system of superior enterprises and inferior enterprises under uncertain environment
- Dynamic behavior analysis of a prey-predator model with ratio-dependent Monod-Haldane functional response
- The points and diameters of quantales
- Directed colimits of some flatness properties and purity of epimorphisms in S-posets
- Super (a, d)-H-antimagic labeling of subdivided graphs
- On the power sum problem of Lucas polynomials and its divisible property
- Existence of solutions for a shear thickening fluid-particle system with non-Newtonian potential
- On generalized P-reducible Finsler manifolds
- On Banach and Kuratowski Theorem, K-Lusin sets and strong sequences
- On the boundedness of square function generated by the Bessel differential operator in weighted Lebesque Lp,α spaces
- On the different kinds of separability of the space of Borel functions
- Curves in the Lorentz-Minkowski plane: elasticae, catenaries and grim-reapers
- Functional analysis method for the M/G/1 queueing model with single working vacation
- Existence of asymptotically periodic solutions for semilinear evolution equations with nonlocal initial conditions
- The existence of solutions to certain type of nonlinear difference-differential equations
- Domination in 4-regular Knödel graphs
- Stepanov-like pseudo almost periodic functions on time scales and applications to dynamic equations with delay
- Algebras of right ample semigroups
- Random attractors for stochastic retarded reaction-diffusion equations with multiplicative white noise on unbounded domains
- Nontrivial periodic solutions to delay difference equations via Morse theory
- A note on the three-way generalization of the Jordan canonical form
- On some varieties of ai-semirings satisfying xp+1 ≈ x
- Abstract-valued Orlicz spaces of range-varying type
- On the recursive properties of one kind hybrid power mean involving two-term exponential sums and Gauss sums
- Arithmetic of generalized Dedekind sums and their modularity
- Multipreconditioned GMRES for simulating stochastic automata networks
- Regularization and error estimates for an inverse heat problem under the conformable derivative
- Transitivity of the εm-relation on (m-idempotent) hyperrings
- Learning Bayesian networks based on bi-velocity discrete particle swarm optimization with mutation operator
- Simultaneous prediction in the generalized linear model
- Two asymptotic expansions for gamma function developed by Windschitl’s formula
- State maps on semihoops
- 𝓜𝓝-convergence and lim-inf𝓜-convergence in partially ordered sets
- Stability and convergence of a local discontinuous Galerkin finite element method for the general Lax equation
- New topology in residuated lattices
- Optimality and duality in set-valued optimization utilizing limit sets
- An improved Schwarz Lemma at the boundary
- Initial layer problem of the Boussinesq system for Rayleigh-Bénard convection with infinite Prandtl number limit
- Toeplitz matrices whose elements are coefficients of Bazilevič functions
- Epi-mild normality
- Nonlinear elastic beam problems with the parameter near resonance
- Orlicz difference bodies
- The Picard group of Brauer-Severi varieties
- Galoisian and qualitative approaches to linear Polyanin-Zaitsev vector fields
- Weak group inverse
- Infinite growth of solutions of second order complex differential equation
- Semi-Hurewicz-Type properties in ditopological texture spaces
- Chaos and bifurcation in the controlled chaotic system
- Translatability and translatable semigroups
- Sharp bounds for partition dimension of generalized Möbius ladders
- Uniqueness theorems for L-functions in the extended Selberg class
- An effective algorithm for globally solving quadratic programs using parametric linearization technique
- Bounds of Strong EMT Strength for certain Subdivision of Star and Bistar
- On categorical aspects of S -quantales
- On the algebraicity of coefficients of half-integral weight mock modular forms
- Dunkl analogue of Szász-mirakjan operators of blending type
- Majorization, “useful” Csiszár divergence and “useful” Zipf-Mandelbrot law
- Global stability of a distributed delayed viral model with general incidence rate
- Analyzing a generalized pest-natural enemy model with nonlinear impulsive control
- Boundary value problems of a discrete generalized beam equation via variational methods
- Common fixed point theorem of six self-mappings in Menger spaces using (CLRST) property
- Periodic and subharmonic solutions for a 2nth-order p-Laplacian difference equation containing both advances and retardations
- Spectrum of free-form Sudoku graphs
- Regularity of fuzzy convergence spaces
- The well-posedness of solution to a compressible non-Newtonian fluid with self-gravitational potential
- On further refinements for Young inequalities
- Pretty good state transfer on 1-sum of star graphs
- On a conjecture about generalized Q-recurrence
- Univariate approximating schemes and their non-tensor product generalization
- Multi-term fractional differential equations with nonlocal boundary conditions
- Homoclinic and heteroclinic solutions to a hepatitis C evolution model
- Regularity of one-sided multilinear fractional maximal functions
- Galois connections between sets of paths and closure operators in simple graphs
- KGSA: A Gravitational Search Algorithm for Multimodal Optimization based on K-Means Niching Technique and a Novel Elitism Strategy
- θ-type Calderón-Zygmund Operators and Commutators in Variable Exponents Herz space
- An integral that counts the zeros of a function
- On rough sets induced by fuzzy relations approach in semigroups
- Computational uncertainty quantification for random non-autonomous second order linear differential equations via adapted gPC: a comparative case study with random Fröbenius method and Monte Carlo simulation
- The fourth order strongly noncanonical operators
- Topical Issue on Cyber-security Mathematics
- Review of Cryptographic Schemes applied to Remote Electronic Voting systems: remaining challenges and the upcoming post-quantum paradigm
- Linearity in decimation-based generators: an improved cryptanalysis on the shrinking generator
- On dynamic network security: A random decentering algorithm on graphs