A Geršgorin-type eigenvalue localization set with n parameters for stochastic matrices
-
 and
and

Abstract
A set in the complex plane which involves n parameters in [0, 1] is given to localize all eigenvalues different from 1 for stochastic matrices. As an application of this set, an upper bound for the moduli of the subdominant eigenvalues of a stochastic matrix is obtained. Lastly, we fix n parameters in [0, 1] to give a new set including all eigenvalues different from 1, which is tighter than those provided by Shen et al. (Linear Algebra Appl. 447 (2014) 74-87) and Li et al. (Linear and Multilinear Algebra 63(11) (2015) 2159-2170) for estimating the moduli of subdominant eigenvalues.
1 Introduction
Stochastic matrices and eigenvalue localization of stochastic matrices play key roles in many application fields, such as Computer Aided Geometric Design [1], Birth-Death Processes [2, 3, 4, 5], and Markov chains [6]. An entrywise nonnegative matrix A = [aij] ∈ ℝn×n is called row stochastic (or simply stochastic) if all its row sums are 1, that is,
Let us denote the ith deleted column sum of the moduli of off-diagonal entries of A by
Obviously, 1 is an eigenvalue of a stochastic matrix with a corresponding eigenvector e = [1, 1, …, 1]T. From the Perron-Frobenius Theorem [7], for any eigenvalue λ of A, that is, λ ∈ σ(A), we have |λ| ≤ 1 [8]. Here we call |λ| a moduli of subdominant eigenvalue of a stochastic matrix A if 1 > |λ| > |η| for every eigenvalue η different from 1 and λ [8, 9, 10].
Since the subdominant eigenvalue of a stochastic matrix is crucial for bounding the convergence rate of stochastic processes [8, 11, 12, 13, 14], it is interesting to give a set to localize all eigenvalues different from 1, or an upper bound for the moduli of its subdominant eigenvalue [8, 15].
One can use the well-known Geršgorin circle set [16] to localize all eigenvalues for a stochastic matrix. However, this set always includes the trival eigenvalue 1, and thus it is not always precise for capturing all eigenvalues different from 1 of a stochastic matrix. Therefore, several authors have tried to modify the Geršgorin circle set to localize more precisely all eigenvalues different from 1. In [8], Cvetković et al. gave the following set.
Theorem 1.1
([8, Theorem 3.4]). LetA = [aij] ∈ ℝn×nbe a stochastic matrix. If λ ∈ σ(A)∖{1}, then
whereγ(A) =
However, the set provided by Theorem 1.1 is not effective in some cases, such as, for the class of stochastic matrices
for more details, see [15]. To overcome this drawback, Li and Li [15] provided another set as follows.
Theorem 1.2
([15, Theorem 6]). LetA = [aij] ∈ ℝn×nbe a stochastic matrix. If λ ∈ σ(A)∖{1}, then
whereγ̃(A) =
Recently, by taking respectively
and
to modify the Geršgorin circle set, Shen et al. [12], and Li et al. [11] gave three sets to localize all eigenvalues different from 1.
Theorem 1.3
([11, 12]). LetA = [aij] ∈ ℝn×nbe a stochastic matrix. If λ ∈ σ(A)∖{1}, then
and
where
andCqi(A) =
Remark here that Shen et al. [12] used these three sets to localize any real eigenvalue different from 1, which are generalized to localize all eigenvalues different from 1 by Li et al. [11].
Also in [11], Li et al. provided another two modifications of the Geršgorin circle set by taking respectively
Theorem 1.4
([11, Theorems 3.3 and 3.8]). LetA = [aij] ∈ ℝn×nbe a stochastic matrix. If λ ∈ σ(A)∖{1}, then
and
where
and
Note that li(A), vi(A), qi(A), Vi(A) and Li(A) are all in the interval
2 A Geršgorin-type eigenvalue localization set with n parameters
We first begin with an important lemma, which is used to give some modifications of the Geršgorin circle set.
Lemma 2.1
([8, 11, 12]). LetA = [aij] ∈ ℝn×nbe a stochastic matrix. For anyd = [d1,d2, …, dn]T ∈ ℝn, ifμ ∈ σ(A)∖{1}, then − μis an eigenvalue of the matrix
Lemma 2.1 shows that once an eigenvalue localization set for B = edT − A is given, we can get a set to localize all eigenvalues different from 1 for the stochastic matrix A [11]. Now we present the following choice of d:
where
By Lemma 2.1 and (1), we can obtain the following set to localize all eigenvalues different from 1 of a stochastic matrix.
Theorem 2.2
LetA = [aij] ∈ ℝn×nbe a stochastic matrix. If λ ∈ σ(A)∖{1}, then for anyαi ∈ [0, 1], i ∈ N,
where
and
Proof
Let
By Lemma 2.1, we have for λ ∈ σ(A)∖{1}, then −λ ∈ σ(Bαi), that is,
Furthermore, note that for any i ∈ N,
and
Hence,
where
Example 2.3
Consider the first 50 stochastic matrices generated by the MATLAB code
and takeαi ∈ [0, 1] fori = 1, 2, …, 10 by the MATLAB code
By drawing the setsΓstoLα(A) inTheorem 2.2and
inTheorems 1.1and1.2, it is not difficult to see that the number ofΓstoLα(A) ⊂ Γis 46, that if 1 ∉ Γ, then 1 ∉ ΓstoLα(A), and that if 1 ∈ Γ, thenΓstoLα(A) may not contain the trivial eigenvalue 1 (also see Table 1). So, by these examples, we conclude that the set inTheorem 2.2captures all eigenvalues different from 1 of a stochastic matrix more precisely than the sets inTheorem 1.1andTheorem 1.2in some cases.
Comparisons of ΓstoLα(A) and Γ = (Γ (A) ⋂ Γ̃̃(A))
| 1 ∈ ΓstoLα(A) | 1 ∉ Γ | ΓstoLα(A) ⊈ Γ, Γ ⊈ ΓstoLα(A) | ΓstoLα(A) ⊂ Γ | |
|---|---|---|---|---|
| Number | 8 | 2 | 4 | 46 |
| The i-th happens | 3, 4, 7, 14, 38, 39, 40, 42 | 25, 31 | 3, 7, 11, 35 | otherwise |
Remark 2.4
Whenαi = 1 for eachi ∈ N, then
When
When
When
Whenαi = 0 for eachi ∈ N, then
Hence, we say that the set ΓstoLα(A) is a generalization of Γstol(A), Γstov(A) and Γstoq(A) in Theorem 1.3, and ΓstoV(A) and ΓstoL(A) in Theorem 1.4. Moreover, according to αi ∈ [0, 1] in Theorem 2.2, we can get the following result easily.
Remark 2.5
LetA = [aij] ∈ ℝn×nbe a stochastic matrix. If λ ∈ σ(A)∖{1}, then
Furthermore, Γ[0,1] (A) ⊆ (ΓstoL(A) ⋂ ΓstoV(A) ⋂ Γstoq(A) ⋂ Γstov(A) ⋂ Γstol(A)).
The set Γ[0,1] (A) in Remark 2.5 is not of much practical use because it involves some parameters αi. In fact, we can take some special αi in practice, which is illustrated by the following example.
Example 2.6
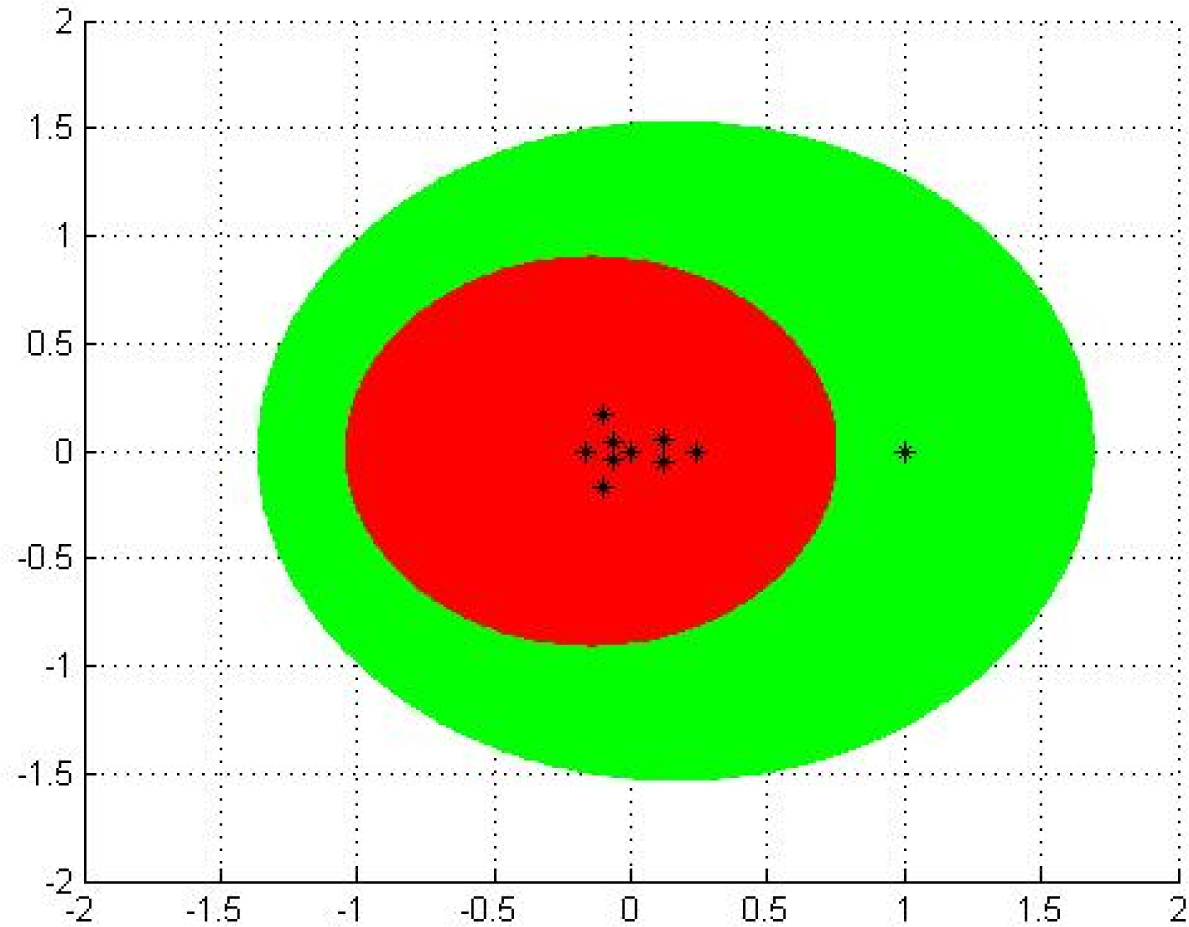
Consider the third stochastic matrixA in Example 2.3. ByTable 1, we have that
which is shown inFigure 1, whereΓstoLα(A) is drawn slightly thicker thanΓ. Furthermore, we take the first 3 vectors

ΓstoLα(A) ⊈ Γ, andΓ ⊈ ΓstoLα(A)
generated by the MATLAB code alpha = rand(1, 10), that is,
and
ByRemark 2.5, we have that for any λ ∈ σ(A)∖{1},
We draw this set in the complex plane, seeFigure 2. It is easy to see
(ΓstoLα(1)(A) ⋂ ΓstoLα(2)(A) ⋂ ΓstoLα(3)(A)) ⊂ Γ
and
This example shows that we can take some special αi to get a set which is tighter than the sets in Theorems 1.1 and 1.2.
It is well-known that an eigenvalue inclusion set leads to a sufficient condition for nonsingular matrices, and vice versa [12, 16]. Hence, from Theorem 2.2 or Remark 2.5, we can get a nonsingular condition for stochastic matrices.
Proposition 2.7
LetA = [aij] ∈ ℝn×nbe a stochastic matrix. If for someᾱi ∈ [0, 1], i ∈ N,
where
Proof
Suppose that A is singular, that is, 0 ∈ σ (A). From Theorem 2.2, we have that for any αi ∈ [0, 1], i ∈ N,
In particular,
Hence, there is an index i0 ∈ N such that
This contradicts (3). The conclusion follows. □
3 An upper bound for the moduli of subdominant eigenvalues
By using the set ΓstoLα(A) in Theorem 2.2, we can give a bound to estimate the moduli of subdominant eigenvalues of a stochastic matrix.
Theorem 3.1
Let A = [aij] ∈ ℝn × nbe a stochastic matrix. If λ ∈ σ(A)∖{1}, then
where
Proof
Let
where
Therefore, each fi(αi), i ∈ N is a continuous function of αi ∈ [0,1], and there are α̃i ∈ [0,1], i∈ N such that
For these α̃i ∈ [0,1], i ∈ N, by Theorem 2.2 we have
Hence, there is an index i0 ∈ N such that
which gives
By (5) we have
which implies
The conclusion follows. □
As in the proof of Theorem 3.1, we can give another bound to estimate the moduli of subdominant eigenvalues by using the sets Γstol(A), Γstov(A) and Γstoq(A) in Theorem 1.3, ΓstoL(A) and ΓstoV(A) in Theorem 1.4, respectively.
Theorem 3.2
Let A = [aij] ∈ ℝn × nbe a stochastic matrix. If λ ∈ σ(A)∖{1}, then
where
and
Proof
We first prove |λ| ≤ ρL. From Theorem 1.4,
As in the proof of Theorem 3.1, we have that there is an index i0 ∈ N such that
and
i.e., |λ|≤ ρL . Similarly, by
we can get respectively
The conclusion follows. □
By the choices of αi in Remark 2.4, it is easy to get the relationships between ρ[0, 1], ρL, ρV, ρq, ρv and ρl as follows.
Theorem 3.3
Let A = [aij] ∈ ℝn × nbe a stochastic matrix. Then
where ρ[0, 1], ρL, ρV, ρq, ρv, and ρl are defined in Theorem 3.1 and Theorem 3.2, respectively.
As in the proof of Theorem 3.2, by Theorems 1.1 and 1.2 two upper bounds for the subdominant eigenvalue of a stochastic matrix are obtained easily.
Proposition 3.4
Let A = [aij] ∈ ℝn × nbe a stochastic matrix and λ ∈ σ(A)∖{1} be its subdominant eigenvalue. Then
consequently,
For the comparison of ρ[0, 1] and the upper bound
in (8), we conclude here that by taking some special αi and the fact that Λ is given by Theorems 1.1 and 1.2, an upper bound can be obtained, which is better than
4 Special choices of αi for the set ΓstoLα(A)
In this section, we choose αi for the set ΓstoLα(A) to give a set, which is tighter than the sets Γstol(A) and ΓstoL(A) by determining the optimal value of αi for estimating the moduli of subdominant eigenvalues of a stochastic matrix.
For a given stochastic matrix A = [aij] ∈ ℝn × n, let
and
where Δi(A) = nLi(A) + (n − 2)li(A) − 2Ci(A). Obviously, N = N+ (A) ⋃ N− (A).
Proposition 4.1
Let A = [aij] ∈ ℝn × nbe a stochastic matrix. If λ ∈ σ(A)∖{1}, then
where
Proof
Note that
Hence, from Theorem 3.1, we have
Furthermore, let
Then when Δi(A) ≥ 0, f(α) reaches its minimum aii − (n − 2)li(A) + Ci(A) at α = 0, and when Δi(A) < 0, f(α) reaches its minimum
at α = 1. Therefore, Inequality (10) is equivalent to
The conclusion follows. □
By the proof of Proposition 4.1, it is not difficult to see that the upper bound ρ0, 1 is larger than ρ[0, 1] in Theorem 3.1, but ρ0, 1 depends only on the entries of a stochastic matrix. Moreover, ρ0, 1 ≤ ρL and ρ0, 1 ≤ ρl, which are given as follows.
Proposition 4.2
Let A = [aij] ∈ ℝn × nbe a stochastic matrix. Then
where ρl, ρL and ρ0, 1are defined in Theorem 3.2 and Proposition 4.1, respectively.
Proof
By the proof of Proposition 4.1, we have that ρ0, 1 is equivalent to the last of Inequality (10), that is,
Also let
Then when Δi(A) ≥ 0, f(α) is a monotonically increasing function of α, and when Δi(A) < 0, f(α) is a monotonically decreasing function of α.
For the case that
Since f(α) is increasing when Δi(A) ≥ 0, we have
which implies
Then similarly as in the proof of ρ0, 1 ≤ ρL, we can obtain easily ρ0, 1 ≤ ρl.
For the case that Li(A) = li(A) for some i ∈ N, we have Δi(A) = 0 and
Similarly as in the case Li(A) > li(A), i ∈ N, we can also obtain easily
The conclusion follows. □
By propositions 4.1 and 4.2, we know that the optimal values of αi, i ∈ N for the bound
which could be obtained by using the set ΓstoLα(A) in Theorem 2.2, are αi = 0 for i ∈ N+(A) and αi = 1 for i ∈ N−(A) such that
is less than or equal to the bounds obtained by using the sets in Theorem 1.3 and 1.4 respectively. This provides a choice of αi, i ∈ N for the set ΓstoLα(A) to localize all eigenvalues different from 1 of a stochastic matrix.
For a stochastic matrix A = [aij] ∈ ℝn × n and
defined as (1), we take αi = 0 for i ∈ N+(A) and αi = 1 for i ∈ N−(A), that is,
For this choice, the set ΓstoLα(A) reduces to
where
Theorem 4.3
Let A = [aij] ∈ ℝn × nbe a stochastic matrix. If λ ∈ σ(A)∖{1}, then
Example 4.4
Consider the stochastic matrix
By computations, we have that N+ (A) = {2, 4, 6}, N− (A) = {1, 3, 5}, and
By drawing the sets Γstol(A), ΓstoL(A) and ΓstoL0, 1(A) in the complex plane (see Figure 3), it is not difficult to see that for any λ ∈ σ(A)∖{1},
and that although ΓstoL0, 1(A) ⊈ Γstol(A) and Γstol(A) ⊈ ΓstoL0, 1(A), the set ΓstoL0, 1(A) is better than Γstol(A) and ΓstoL(A) for estimating the moduli of subdominant eigenvalues.

Γstol(A), ΓstoL(A) and ΓstoL0, 1(A)
5 Conclusions
In this paper, a set with n parameters in [0, 1] is given to localize all eigenvalues different from 1 for a stochastic matrix A, that is,
In particular, when αi = 0 for each i ∈ N, ΓstoLα(A) reduces to the set Γstol(A), which consists of n sets
and
Moreover, by taking αi = 0 for i ∈ N+(A) and αi = 1 for i ∈ N−(A), we give a set ΓstoL0, 1(A), which consists of |N+(A)| sets
where
The authors are grateful to the referees for their useful and constructive suggestions. This work is supported by National Natural Science Foundations of China (11601473) and CAS “Light “ West China” Program.
Acknowledgement
The authors are grateful to the referees for their useful and constructive suggestions. This work is supported by National Natural Science Foundations of China (11601473) and CAS “Light of West China” Program.
References
[1] Peña J.M., Shape Preserving Representations in Computer Aided-Geometric Design, Nova Science Publishers, Hauppage, NY, 1999Search in Google Scholar
[2] Clayton A., Quasi-birth-and-death processes and matrix-valued orthogonal polynomials, SIAM J. Matrix Anal. Appl., 2010, 31, 2239-226010.1137/080742816Search in Google Scholar
[3] Karlin S., Mcgregor J., A characterization of birth and death processes, Proc. Natl. Acad. Sci. U.S.A., 1959, 45, 375-37910.1073/pnas.45.3.375Search in Google Scholar PubMed PubMed Central
[4] Mitrofanov A.YU., Stochastic Markov models of the formation and disintegration of binary complexes, Mat. Model., 2001, 13, 101-109Search in Google Scholar
[5] Mitrofanov A.YU., Sensitivity and convergence of uniformly ergodic Markov chains, J. Appl. Probab., 2005, 42, 1003-101410.1239/jap/1134587812Search in Google Scholar
[6] Seneta E., Non-negative Matrices and Markov Chains, Springer-Verlag, New York, 198110.1007/0-387-32792-4Search in Google Scholar
[7] Berman A., Plemmons R.J., Nonnegative Matrices in the Mathematical Sciences, Classics in Applied Mathematics, SIAM, Philadelphia, 199410.1137/1.9781611971262Search in Google Scholar
[8] Cvetković L.J., Kostić V., Peña J.M., Eigenvalue Localization Refinements for Matrices Related to Positivity, SIAM J. Matrix Anal. Appl., 2011, 32, 771-78410.1137/100807077Search in Google Scholar
[9] Kirkland S., A cycle-based bound for subdominant eigenvalues of stochastic matrices, Linear and Multilinear Algebra, 2009, 57, 247-26610.1080/03081080701669309Search in Google Scholar
[10] Kirkland S., Subdominant eigenvalues for stochastic matrices with given column sums, Electron. J. Linear Algebra, 2009, 18, 784-80010.13001/1081-3810.1345Search in Google Scholar
[11] Li C.Q., Liu Q.B., Li Y.T., Geršgorin-type and Brauer-type eigenvalue localization sets of stochastic matrices, Linear and Multilinear Algebra, 2015, 63(11), 2159-217010.1080/03081087.2014.986044Search in Google Scholar
[12] Shen S.Q., Yu J., Huang T.Z., Some classes of nonsingular matrices with applications to localize the real eigenvalues of real matrices, Linear Algebra Appl., 2014, 447, 74-8710.1016/j.laa.2013.02.005Search in Google Scholar
[13] Wang Y.J., Liu W.Q., Caccetta L., Zhou G.L., Parameter selection for nonnegative matrix/tensor sparse decomposition, Operations Research Letters, 2015, 43, 423-42610.1016/j.orl.2015.06.005Search in Google Scholar
[14] Zhou G., Wang G., Qi L.Q., Alqahtani M., A fast algorithm for the spectral radii of weakly reducible nonnegative tensors, Numerical Linear Algebra with applications, 2018, 10.1002/nla.2134Search in Google Scholar
[15] Li C.Q., Li Y.T., A modification of eigenvalue localization for stochastic matrices, Linear algebra and its applications, 2014, 460, 231-24110.1016/j.laa.2014.07.032Search in Google Scholar
[16] Varga R.S., Geršgorin and his circles, Springer-Verlag, Berlin, 200410.1007/978-3-642-17798-9Search in Google Scholar
© 2018 Wang et al., published by De Gruyter
This work is licensed under the Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 License.
Articles in the same Issue
- Regular Articles
- Algebraic proofs for shallow water bi–Hamiltonian systems for three cocycle of the semi-direct product of Kac–Moody and Virasoro Lie algebras
- On a viscous two-fluid channel flow including evaporation
- Generation of pseudo-random numbers with the use of inverse chaotic transformation
- Singular Cauchy problem for the general Euler-Poisson-Darboux equation
- Ternary and n-ary f-distributive structures
- On the fine Simpson moduli spaces of 1-dimensional sheaves supported on plane quartics
- Evaluation of integrals with hypergeometric and logarithmic functions
- Bounded solutions of self-adjoint second order linear difference equations with periodic coeffients
- Oscillation of first order linear differential equations with several non-monotone delays
- Existence and regularity of mild solutions in some interpolation spaces for functional partial differential equations with nonlocal initial conditions
- The log-concavity of the q-derangement numbers of type B
- Generalized state maps and states on pseudo equality algebras
- Monotone subsequence via ultrapower
- Note on group irregularity strength of disconnected graphs
- On the security of the Courtois-Finiasz-Sendrier signature
- A further study on ordered regular equivalence relations in ordered semihypergroups
- On the structure vector field of a real hypersurface in complex quadric
- Rank relations between a {0, 1}-matrix and its complement
- Lie n superderivations and generalized Lie n superderivations of superalgebras
- Time parallelization scheme with an adaptive time step size for solving stiff initial value problems
- Stability problems and numerical integration on the Lie group SO(3) × R3 × R3
- On some fixed point results for (s, p, α)-contractive mappings in b-metric-like spaces and applications to integral equations
- On algebraic characterization of SSC of the Jahangir’s graph 𝓙n,m
- A greedy algorithm for interval greedoids
- On nonlinear evolution equation of second order in Banach spaces
- A primal-dual approach of weak vector equilibrium problems
- On new strong versions of Browder type theorems
- A Geršgorin-type eigenvalue localization set with n parameters for stochastic matrices
- Restriction conditions on PL(7, 2) codes (3 ≤ |𝓖i| ≤ 7)
- Singular integrals with variable kernel and fractional differentiation in homogeneous Morrey-Herz-type Hardy spaces with variable exponents
- Introduction to disoriented knot theory
- Restricted triangulation on circulant graphs
- Boundedness control sets for linear systems on Lie groups
- Chen’s inequalities for submanifolds in (κ, μ)-contact space form with a semi-symmetric metric connection
- Disjointed sum of products by a novel technique of orthogonalizing ORing
- A parametric linearizing approach for quadratically inequality constrained quadratic programs
- Generalizations of Steffensen’s inequality via the extension of Montgomery identity
- Vector fields satisfying the barycenter property
- On the freeness of hypersurface arrangements consisting of hyperplanes and spheres
- Biderivations of the higher rank Witt algebra without anti-symmetric condition
- Some remarks on spectra of nuclear operators
- Recursive interpolating sequences
- Involutory biquandles and singular knots and links
- Constacyclic codes over 𝔽pm[u1, u2,⋯,uk]/〈 ui2 = ui, uiuj = ujui〉
- Topological entropy for positively weak measure expansive shadowable maps
- Oscillation and non-oscillation of half-linear differential equations with coeffcients determined by functions having mean values
- On 𝓠-regular semigroups
- One kind power mean of the hybrid Gauss sums
- A reduced space branch and bound algorithm for a class of sum of ratios problems
- Some recurrence formulas for the Hermite polynomials and their squares
- A relaxed block splitting preconditioner for complex symmetric indefinite linear systems
- On f - prime radical in ordered semigroups
- Positive solutions of semipositone singular fractional differential systems with a parameter and integral boundary conditions
- Disjoint hypercyclicity equals disjoint supercyclicity for families of Taylor-type operators
- A stochastic differential game of low carbon technology sharing in collaborative innovation system of superior enterprises and inferior enterprises under uncertain environment
- Dynamic behavior analysis of a prey-predator model with ratio-dependent Monod-Haldane functional response
- The points and diameters of quantales
- Directed colimits of some flatness properties and purity of epimorphisms in S-posets
- Super (a, d)-H-antimagic labeling of subdivided graphs
- On the power sum problem of Lucas polynomials and its divisible property
- Existence of solutions for a shear thickening fluid-particle system with non-Newtonian potential
- On generalized P-reducible Finsler manifolds
- On Banach and Kuratowski Theorem, K-Lusin sets and strong sequences
- On the boundedness of square function generated by the Bessel differential operator in weighted Lebesque Lp,α spaces
- On the different kinds of separability of the space of Borel functions
- Curves in the Lorentz-Minkowski plane: elasticae, catenaries and grim-reapers
- Functional analysis method for the M/G/1 queueing model with single working vacation
- Existence of asymptotically periodic solutions for semilinear evolution equations with nonlocal initial conditions
- The existence of solutions to certain type of nonlinear difference-differential equations
- Domination in 4-regular Knödel graphs
- Stepanov-like pseudo almost periodic functions on time scales and applications to dynamic equations with delay
- Algebras of right ample semigroups
- Random attractors for stochastic retarded reaction-diffusion equations with multiplicative white noise on unbounded domains
- Nontrivial periodic solutions to delay difference equations via Morse theory
- A note on the three-way generalization of the Jordan canonical form
- On some varieties of ai-semirings satisfying xp+1 ≈ x
- Abstract-valued Orlicz spaces of range-varying type
- On the recursive properties of one kind hybrid power mean involving two-term exponential sums and Gauss sums
- Arithmetic of generalized Dedekind sums and their modularity
- Multipreconditioned GMRES for simulating stochastic automata networks
- Regularization and error estimates for an inverse heat problem under the conformable derivative
- Transitivity of the εm-relation on (m-idempotent) hyperrings
- Learning Bayesian networks based on bi-velocity discrete particle swarm optimization with mutation operator
- Simultaneous prediction in the generalized linear model
- Two asymptotic expansions for gamma function developed by Windschitl’s formula
- State maps on semihoops
- 𝓜𝓝-convergence and lim-inf𝓜-convergence in partially ordered sets
- Stability and convergence of a local discontinuous Galerkin finite element method for the general Lax equation
- New topology in residuated lattices
- Optimality and duality in set-valued optimization utilizing limit sets
- An improved Schwarz Lemma at the boundary
- Initial layer problem of the Boussinesq system for Rayleigh-Bénard convection with infinite Prandtl number limit
- Toeplitz matrices whose elements are coefficients of Bazilevič functions
- Epi-mild normality
- Nonlinear elastic beam problems with the parameter near resonance
- Orlicz difference bodies
- The Picard group of Brauer-Severi varieties
- Galoisian and qualitative approaches to linear Polyanin-Zaitsev vector fields
- Weak group inverse
- Infinite growth of solutions of second order complex differential equation
- Semi-Hurewicz-Type properties in ditopological texture spaces
- Chaos and bifurcation in the controlled chaotic system
- Translatability and translatable semigroups
- Sharp bounds for partition dimension of generalized Möbius ladders
- Uniqueness theorems for L-functions in the extended Selberg class
- An effective algorithm for globally solving quadratic programs using parametric linearization technique
- Bounds of Strong EMT Strength for certain Subdivision of Star and Bistar
- On categorical aspects of S -quantales
- On the algebraicity of coefficients of half-integral weight mock modular forms
- Dunkl analogue of Szász-mirakjan operators of blending type
- Majorization, “useful” Csiszár divergence and “useful” Zipf-Mandelbrot law
- Global stability of a distributed delayed viral model with general incidence rate
- Analyzing a generalized pest-natural enemy model with nonlinear impulsive control
- Boundary value problems of a discrete generalized beam equation via variational methods
- Common fixed point theorem of six self-mappings in Menger spaces using (CLRST) property
- Periodic and subharmonic solutions for a 2nth-order p-Laplacian difference equation containing both advances and retardations
- Spectrum of free-form Sudoku graphs
- Regularity of fuzzy convergence spaces
- The well-posedness of solution to a compressible non-Newtonian fluid with self-gravitational potential
- On further refinements for Young inequalities
- Pretty good state transfer on 1-sum of star graphs
- On a conjecture about generalized Q-recurrence
- Univariate approximating schemes and their non-tensor product generalization
- Multi-term fractional differential equations with nonlocal boundary conditions
- Homoclinic and heteroclinic solutions to a hepatitis C evolution model
- Regularity of one-sided multilinear fractional maximal functions
- Galois connections between sets of paths and closure operators in simple graphs
- KGSA: A Gravitational Search Algorithm for Multimodal Optimization based on K-Means Niching Technique and a Novel Elitism Strategy
- θ-type Calderón-Zygmund Operators and Commutators in Variable Exponents Herz space
- An integral that counts the zeros of a function
- On rough sets induced by fuzzy relations approach in semigroups
- Computational uncertainty quantification for random non-autonomous second order linear differential equations via adapted gPC: a comparative case study with random Fröbenius method and Monte Carlo simulation
- The fourth order strongly noncanonical operators
- Topical Issue on Cyber-security Mathematics
- Review of Cryptographic Schemes applied to Remote Electronic Voting systems: remaining challenges and the upcoming post-quantum paradigm
- Linearity in decimation-based generators: an improved cryptanalysis on the shrinking generator
- On dynamic network security: A random decentering algorithm on graphs
Articles in the same Issue
- Regular Articles
- Algebraic proofs for shallow water bi–Hamiltonian systems for three cocycle of the semi-direct product of Kac–Moody and Virasoro Lie algebras
- On a viscous two-fluid channel flow including evaporation
- Generation of pseudo-random numbers with the use of inverse chaotic transformation
- Singular Cauchy problem for the general Euler-Poisson-Darboux equation
- Ternary and n-ary f-distributive structures
- On the fine Simpson moduli spaces of 1-dimensional sheaves supported on plane quartics
- Evaluation of integrals with hypergeometric and logarithmic functions
- Bounded solutions of self-adjoint second order linear difference equations with periodic coeffients
- Oscillation of first order linear differential equations with several non-monotone delays
- Existence and regularity of mild solutions in some interpolation spaces for functional partial differential equations with nonlocal initial conditions
- The log-concavity of the q-derangement numbers of type B
- Generalized state maps and states on pseudo equality algebras
- Monotone subsequence via ultrapower
- Note on group irregularity strength of disconnected graphs
- On the security of the Courtois-Finiasz-Sendrier signature
- A further study on ordered regular equivalence relations in ordered semihypergroups
- On the structure vector field of a real hypersurface in complex quadric
- Rank relations between a {0, 1}-matrix and its complement
- Lie n superderivations and generalized Lie n superderivations of superalgebras
- Time parallelization scheme with an adaptive time step size for solving stiff initial value problems
- Stability problems and numerical integration on the Lie group SO(3) × R3 × R3
- On some fixed point results for (s, p, α)-contractive mappings in b-metric-like spaces and applications to integral equations
- On algebraic characterization of SSC of the Jahangir’s graph 𝓙n,m
- A greedy algorithm for interval greedoids
- On nonlinear evolution equation of second order in Banach spaces
- A primal-dual approach of weak vector equilibrium problems
- On new strong versions of Browder type theorems
- A Geršgorin-type eigenvalue localization set with n parameters for stochastic matrices
- Restriction conditions on PL(7, 2) codes (3 ≤ |𝓖i| ≤ 7)
- Singular integrals with variable kernel and fractional differentiation in homogeneous Morrey-Herz-type Hardy spaces with variable exponents
- Introduction to disoriented knot theory
- Restricted triangulation on circulant graphs
- Boundedness control sets for linear systems on Lie groups
- Chen’s inequalities for submanifolds in (κ, μ)-contact space form with a semi-symmetric metric connection
- Disjointed sum of products by a novel technique of orthogonalizing ORing
- A parametric linearizing approach for quadratically inequality constrained quadratic programs
- Generalizations of Steffensen’s inequality via the extension of Montgomery identity
- Vector fields satisfying the barycenter property
- On the freeness of hypersurface arrangements consisting of hyperplanes and spheres
- Biderivations of the higher rank Witt algebra without anti-symmetric condition
- Some remarks on spectra of nuclear operators
- Recursive interpolating sequences
- Involutory biquandles and singular knots and links
- Constacyclic codes over 𝔽pm[u1, u2,⋯,uk]/〈 ui2 = ui, uiuj = ujui〉
- Topological entropy for positively weak measure expansive shadowable maps
- Oscillation and non-oscillation of half-linear differential equations with coeffcients determined by functions having mean values
- On 𝓠-regular semigroups
- One kind power mean of the hybrid Gauss sums
- A reduced space branch and bound algorithm for a class of sum of ratios problems
- Some recurrence formulas for the Hermite polynomials and their squares
- A relaxed block splitting preconditioner for complex symmetric indefinite linear systems
- On f - prime radical in ordered semigroups
- Positive solutions of semipositone singular fractional differential systems with a parameter and integral boundary conditions
- Disjoint hypercyclicity equals disjoint supercyclicity for families of Taylor-type operators
- A stochastic differential game of low carbon technology sharing in collaborative innovation system of superior enterprises and inferior enterprises under uncertain environment
- Dynamic behavior analysis of a prey-predator model with ratio-dependent Monod-Haldane functional response
- The points and diameters of quantales
- Directed colimits of some flatness properties and purity of epimorphisms in S-posets
- Super (a, d)-H-antimagic labeling of subdivided graphs
- On the power sum problem of Lucas polynomials and its divisible property
- Existence of solutions for a shear thickening fluid-particle system with non-Newtonian potential
- On generalized P-reducible Finsler manifolds
- On Banach and Kuratowski Theorem, K-Lusin sets and strong sequences
- On the boundedness of square function generated by the Bessel differential operator in weighted Lebesque Lp,α spaces
- On the different kinds of separability of the space of Borel functions
- Curves in the Lorentz-Minkowski plane: elasticae, catenaries and grim-reapers
- Functional analysis method for the M/G/1 queueing model with single working vacation
- Existence of asymptotically periodic solutions for semilinear evolution equations with nonlocal initial conditions
- The existence of solutions to certain type of nonlinear difference-differential equations
- Domination in 4-regular Knödel graphs
- Stepanov-like pseudo almost periodic functions on time scales and applications to dynamic equations with delay
- Algebras of right ample semigroups
- Random attractors for stochastic retarded reaction-diffusion equations with multiplicative white noise on unbounded domains
- Nontrivial periodic solutions to delay difference equations via Morse theory
- A note on the three-way generalization of the Jordan canonical form
- On some varieties of ai-semirings satisfying xp+1 ≈ x
- Abstract-valued Orlicz spaces of range-varying type
- On the recursive properties of one kind hybrid power mean involving two-term exponential sums and Gauss sums
- Arithmetic of generalized Dedekind sums and their modularity
- Multipreconditioned GMRES for simulating stochastic automata networks
- Regularization and error estimates for an inverse heat problem under the conformable derivative
- Transitivity of the εm-relation on (m-idempotent) hyperrings
- Learning Bayesian networks based on bi-velocity discrete particle swarm optimization with mutation operator
- Simultaneous prediction in the generalized linear model
- Two asymptotic expansions for gamma function developed by Windschitl’s formula
- State maps on semihoops
- 𝓜𝓝-convergence and lim-inf𝓜-convergence in partially ordered sets
- Stability and convergence of a local discontinuous Galerkin finite element method for the general Lax equation
- New topology in residuated lattices
- Optimality and duality in set-valued optimization utilizing limit sets
- An improved Schwarz Lemma at the boundary
- Initial layer problem of the Boussinesq system for Rayleigh-Bénard convection with infinite Prandtl number limit
- Toeplitz matrices whose elements are coefficients of Bazilevič functions
- Epi-mild normality
- Nonlinear elastic beam problems with the parameter near resonance
- Orlicz difference bodies
- The Picard group of Brauer-Severi varieties
- Galoisian and qualitative approaches to linear Polyanin-Zaitsev vector fields
- Weak group inverse
- Infinite growth of solutions of second order complex differential equation
- Semi-Hurewicz-Type properties in ditopological texture spaces
- Chaos and bifurcation in the controlled chaotic system
- Translatability and translatable semigroups
- Sharp bounds for partition dimension of generalized Möbius ladders
- Uniqueness theorems for L-functions in the extended Selberg class
- An effective algorithm for globally solving quadratic programs using parametric linearization technique
- Bounds of Strong EMT Strength for certain Subdivision of Star and Bistar
- On categorical aspects of S -quantales
- On the algebraicity of coefficients of half-integral weight mock modular forms
- Dunkl analogue of Szász-mirakjan operators of blending type
- Majorization, “useful” Csiszár divergence and “useful” Zipf-Mandelbrot law
- Global stability of a distributed delayed viral model with general incidence rate
- Analyzing a generalized pest-natural enemy model with nonlinear impulsive control
- Boundary value problems of a discrete generalized beam equation via variational methods
- Common fixed point theorem of six self-mappings in Menger spaces using (CLRST) property
- Periodic and subharmonic solutions for a 2nth-order p-Laplacian difference equation containing both advances and retardations
- Spectrum of free-form Sudoku graphs
- Regularity of fuzzy convergence spaces
- The well-posedness of solution to a compressible non-Newtonian fluid with self-gravitational potential
- On further refinements for Young inequalities
- Pretty good state transfer on 1-sum of star graphs
- On a conjecture about generalized Q-recurrence
- Univariate approximating schemes and their non-tensor product generalization
- Multi-term fractional differential equations with nonlocal boundary conditions
- Homoclinic and heteroclinic solutions to a hepatitis C evolution model
- Regularity of one-sided multilinear fractional maximal functions
- Galois connections between sets of paths and closure operators in simple graphs
- KGSA: A Gravitational Search Algorithm for Multimodal Optimization based on K-Means Niching Technique and a Novel Elitism Strategy
- θ-type Calderón-Zygmund Operators and Commutators in Variable Exponents Herz space
- An integral that counts the zeros of a function
- On rough sets induced by fuzzy relations approach in semigroups
- Computational uncertainty quantification for random non-autonomous second order linear differential equations via adapted gPC: a comparative case study with random Fröbenius method and Monte Carlo simulation
- The fourth order strongly noncanonical operators
- Topical Issue on Cyber-security Mathematics
- Review of Cryptographic Schemes applied to Remote Electronic Voting systems: remaining challenges and the upcoming post-quantum paradigm
- Linearity in decimation-based generators: an improved cryptanalysis on the shrinking generator
- On dynamic network security: A random decentering algorithm on graphs