Lunar PNT system concept and simulation results
-
Sergey Kaplev
 ,
Maxim Titov
,
Maxim Titov

Abstract
The revived interest of many countries and the growing number of ongoing and scheduled missions to the Moon increases the significance of supporting navigation system development. A number of publications are based on multi-Global Navigation Satellite System (GNSS) signal reception from the opposite side of the Earth using high-gain antennas and lunar augmentation constellations. While the accuracy of such systems could be sufficient, the positioning, navigation, and timing (PNT) service dependency on circumterestrial navigation sources prevents the use of advanced navigation technologies honed in circumlunar space for further Mars and other celestial body missions, which is one of the major goals of lunar exploration. Moreover, orbit determination and time synchronization (ODTS) method descriptions and estimations are usually skipped in the studies of lunar augmentations. An alternative concept of the Lunar Navigation Satellite System (LNSS) is proposed based on Earth-dependency reduction principal and on-board ODTS. The advantage of the proposed approach is that LNSS-like systems could be adapted for other celestial bodies taking into account aspects such as their shape, dynamics, perturbations, as well as exploration priority regions. The baseline LNSS constellation of three circular orbits with three satellites each has been chosen as the result of multicriterion analysis of orbital stability and geometry. Station keeping requires less than 15 m/s for 10 years without significant changes in navigation performance in the prioritized Polar Regions. The full cycle of LNSS operation from ODTS and signal generation to its reception, processing, and obtaining navigation solutions has been simulated to obtain positioning accuracy for different types of users. Positioning accuracy of space users in approach/departure phases, in near-lunar orbits, as well as static users on a lunar surface is confirmed on a level of a few tens of meters. The same accuracy is achievable by dynamic users on a lunar surface during route stops or also in motion in case of LNSS constellation expansion or deployment of ground-based augmentation beacons in on-site exploration zones.
Acronyms/abbreviations
- BLS
-
base lunar station
- DRO
-
distant retrograde orbits
- ISL
-
intersatellite link
- LNSS
-
lunar navigation and communication satellite system
- ODTS
-
orbit determination and time synchronization
- OGTS
-
orbital group time scale
- PNT
-
positioning, navigation and timing
1 Introduction
Ground-based radio facilities are traditionally used for deep space missions’ navigation. However, with the intensification of missions, ground-based navigation facilities will be unable to provide sufficient support for the increased number of users. Efficiency of communication and navigation at a distance from the Earth and with the shading of celestial bodies will also suffer.
In this regard, space agencies worldwide are conducting research studies on the development of navigation tools for space missions capable of autonomous operations. By the end of 2020, the number of research papers dealing with different types of lunar positioning, navigation, and timing (PNT) sources has grown significantly. The main directions are extension of the Global Navigation Satellite System (GNSS) space service volume up to the Moon distance (UNOOSA, 2018, Schönfeldt et al. October 2020, Baird 2021, Delépaut et al. 2019, Delépaut et al. 2020, Winternitz et al. 2019), autonomous optical and pulsar navigation (ISS Utilization… 2020), and building orbital and ground lunar augmentations for the GNSS (Schönfeldt et al. December 2020, Hagenau et al. 2021, Schönfeldt et al. 2020, Carpenter et al. 2004, Parker et al. 2019, Barton et al. 1993, Circi et al. 2014, Chen et al. 2019).
While autonomous pulsar navigation is still estimated on the level of a few kilometers and could be used for transfer orbits only, an augmented GNSS brings new possibilities for circumlunar space but is still strongly connected with the terrestrial sources of PNT data. At the same time, one of the main goals of lunar exploration is the testing of key technologies for further Mars and other celestial body missions. This requires the PNT data sources to be less dependent on Earth. In this case, augmentation systems should become a self-sufficient Lunar Navigation Satellite System (LNSS), based on on-board algorithms of orbit determination and time synchronization (ODTS), planning, and self-control. The basics of such system were presented in 2012 (Bolkunov et al. 2012) and after years of study in 2017–2020 the chosen LNSS concept was provided in a paper along with the simulation results.
2 LNSS concept
2.1 Orbit stability and constellation design
The paper by Kaplev et al. (2019) presents the results of multicriterion comparison of options for the multifunctional constellation design of the LNSS. The developed assessment criteria include the maintenance of high navigation availability performance within 10 years, tolerance to individual satellite failure, and minimization of delta-V for orbital station keeping. As a result, the structure of the LNSS constellation is proposed (as shown in Table 1).
LNSS nominal constellation on 30.03.2030 00:00:00 UTC epoch
| Planes | 3 |
| Satellites | 9 |
| a (km) | 4,500 ± 2 |
| e | 0 |
| i (deg) | 117 |
| Ω (deg) | 134.411, 14.411, –85.589 |
| ω p (deg) | 0 |
| φ (deg) | (0, 120, 240), (40, 160, 280), (80, 200, 320) |
Despite the common practice of preference of elliptical orbits over the circular orbits for the prioritized polar regions, it is hard to achieve a stable coverage due to the origin properties of this class of orbits. The dependence between eccentricity and inclination in the reference frame of the apparent motion of the Earth about the Moon helps to find a stable elliptical orbit. However, due to the Moon equator inclination over this reference frame, an entire constellation could be designed with a few orbital planes either with different eccentricities or inclinations. The result leads to significant differences in performance over the lifetime. As an example, Figure 1 provides two-plane constellation evolution over 10 years with a resulted range of 64–96.5% dual-satellite availability at the polar region (Kaplev et al. 2019).

2 × 3 constellation on frozen elliptic orbit evolution over 10 years.
Other popular Halo and DRO orbits are good choices for communication purposes, but for the navigation system, they have ODTS accuracy limits on account of small derivatives.
Taking constellation performance stability and orbital stability as the main decision criteria, a semimajor axis and inclination of the circular orbits have been chosen in the areas of the longest satellite lifetime before the evolution limit occurrence (as shown in Figure 2).

Circular orbit stability areas: eccentricity evolution for 0.01, inclination evolution for 10°, and delta-RAAN between orbit evolution for 20°.
Stability areas are presented for the worst Right Ascension of the Ascending Node (RAAN) and the worst epoch. Additional adjustment has been done for the semimajor axis of each satellite to provide an equal angular speed and for the RAAN of the third orbital plane to limit delta-RAAN evolution within the 20° limit instead of 40° with the regular constellation.
The result of the station keeping simulation with the only correction of eccentricity at 0.005 and formation flight is provided in Figure 3 and Table 2. Nominal and worst dual-satellite coverages are shown in Figure 4.

LNSS orbit evolution and station keeping over 10 years.
LNSS availability performance over a 10 year lifetime as a daily probability of a given number of satellites in view in a polar region and globally
| Region (φ < −60°) | Average | Worst point |
|---|---|---|
| ≥2 satellites | 0.987–1.000 | 0.900–0.965 |
| ≥3 satellites | 0.761–0.811 | 0.243–0.580 |
| ≥4 satellites | 0.028–0.067 | — |
| Global | Average | Worst point |
|---|---|---|
| ≥2 satellites | 0.940–0.967 | 0.576–0.799 |
| ≥3 satellites | 0.434–0.446 | 0.000–0.038 |
| ≥4 satellites | 0.012–0.031 | — |
| ∆V (m/s) | 10.368–15.836 | |

Dual-satellite coverage for nominal and degraded over 10 years LNSS constellation.
The chosen constellation with the near 100% dual-satellite coverage will provide reliable communication service and positioning service based on pseudorange measurement accumulation and filtering.
2.2 ODTS methods
For the self-sufficient system, the reliable on-board ODTS algorithm should be chosen. Different combinations of a number of radio, laser, and optical measurements have been simulated for the proposed system. In most scenarios, the key role is for the intersatellite link (ISL) measurements. The ISL helps to determine both the orbital group time scale (OGTS) of the constellation and the shape of the orbital constellation as a solid body (Bolkunov et al. 2012).
The advantage of OGTS is the less strong requirements of the satellite clock stability (daily 10−13 in simulations) due to the constant visibility of the pairs and ability to maintain rapid updates of clock corrections, e.g., with a period of one hour or less. As shown in Figure 5, for the measurement interval of 0.5 h, the clock correction accuracy against OGTS in within the 5 ns threshold, which is more than enough for lunar PNT. At the same time the OGTS offset to terrestrial UTC realization could be predicted less accurately without any issues for navigation purpose.

OGTS generation results as the offset between broadcast clocks and UTC.
The orientation of the solid constellation could be then determined using additional measurements in the corresponding reference frame. Additional range measurements to the ground reflectors give the result in selenodetic reference frames; additional angular optical measurements of the satellite–satellite line of sight over the celestial sphere (astro-measurements) give the result in the International Celestial Reference Frame (ICRF) shifted to the lunar center. The combination of both types of measurements provides an update of the lunar pole coordinates.
In the proposed LNSS concept, the minimum on-board equipment of self-sufficient ODTS is chosen to augment the ISL with the range measurements to the passive lunar reflectors left from the previous missions. Now, there are five reflectors determining the current selenodetic reference frame, Principal Axes, available via JPL DE430 (Folkner et al. 2014) and IAA RAS EPM 2017 (Pitjeva and Pavlov 2017) ephemeris. Most of further lunar missions will be also equipped with a reflector, extending the passive ground network for better orbit determination performance. Even for the current network with the current reflector panel orientation and a short measurement interval, the chosen combination of on-board measurements provides the sufficient accuracy of orbit determination less than 10 m (3σ) as shown in Figure 6. ISL measurement errors were taken as the normal distribution with 0.4 m mean and 0.2 m deviation, reflector range errors had 0.1 m mean and deviation.

On-board LNSS orbit determination simulation results over 24 h, the measurement interval is 1 h.
Similar results are achievable using the astro-measurements with 1 accuracy instead of reflectors and a longer base equaled to almost half of the orbital period as shown in Figure 7.

On-board LNSS orbit determination with astro-measurements, the measurement interval is 3.5 h.
2.3 Self-control and lunar ground segment reduction
On-board ODTS providing accurate LNSS positioning serves as the core for the on-board control algorithms, including scheduling algorithms and station keeping. The hardest challenge for the self-controlled LNSS satellite is the ability to overcome most of the possible failures without Earth intervention. Some of the failures will still need to be monitored from a distance. Nevertheless, it is expected that the role of terrestrial facilities will be reduced to control at the first deployment phase and to a monitoring role at the operational phase.
It will allow us to limit the lunar ground infrastructure to only one base lunar station (BLS) with a retransmitter and an LNSS receiver for communication purposes and occasional OGTS for UTC synchronization via two-way comparison or pulsar timing. These functions could be implemented as an additional equipment on any planned lander.
2.4 Ground-based augmentation beacons
Ground-based augmentation beacons could be deployed optionally in on-site exploration zones to enhance the geometry and provide instantaneous positioning solution to dynamic users like rovers.
Beacons should be also equipped by an LNSS receiver for OGTS synchronization purpose.
Navigation signals broadcast by beacons should have different bands to avoid interference with LNSS satellites and should have time or frequency divisions to avoid interference within the beacon network, considering possible scenarios of strong distance and signal power differences from beacons in user receivers.
In the proposed LNSS concept, the GLONASS-like L1OC CDMA signals have been chosen for LNSS satellites, and modified L3OC with time and frequency division multiplexing is for beacons. The structure of messages has been modified (e.g., iono corrections excluded, Earth orientation parameters excluded to include libration angles, etc).
3 Simulation tools and scenarios
The simulation results presented in Section 2 have been obtained in a recently developed complex LNSS simulator on vector signal generators representing the full cycle of LNSS operations including (Figure 8):
constellation station keeping and formation flight;
various ODTS methods;
beacon selenodetic referencing and synchronization;
OGTS to UTC time scale comparison;
satellite and beacon data, message, and signal generation for the given user trajectory;
satellite and beacon signal acquisition, tracking, and demodulation;
various methods of positioning and timing solution.
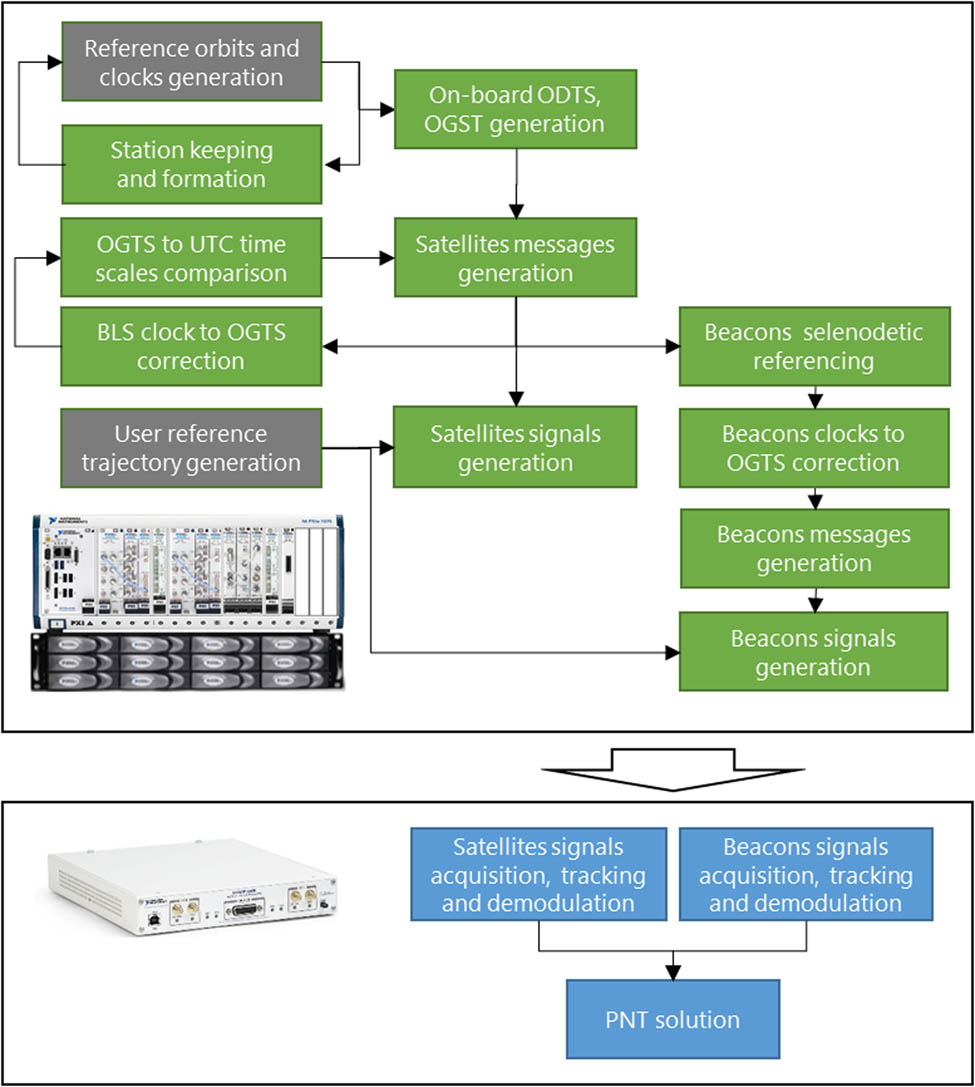
LNSS simulator simplified diagram.
The LNSS simulator allows the adjustment of the methods and characteristics of the different LNSS subsystems and equipment to estimate the outcome at the user level. Additional sources like GNSS and/or terrestrial ground station measurements could be implemented in the receiver model due to the scalable simulator architecture. Now, these types of measurements are used in a few ODTS scenarios.
As a result of LNSS full operational cycle simulations, the positioning accuracy of a few user scenarios have been obtained:
static users in a south crater Boguslawsky;
low orbital users;
dynamic rovers in a south crater Boguslawsky.
In all scenarios, an LNSS constellation of nine satellites is simulated with the on-board ODTS method with characteristics shown in Section 2 and in Figures 4 and 5. At the third rover scenario, the augmentation beacon network is also added to the overall solution.
Beacons and user clocks are observed with a daily Allan variance stability of 10−12 and an initial time offset of 1 microsecond.
The force model for ephemeris propagation is observed to be less accurate than that for the reference orbits, where 25 harmonics of the latest GRAIL mission selenopotential is used along with DE430/EPM third body influence and solar pressure.
The OD measurement interval is 3,600 s. The message update interval for both satellites and beacons is 1,800 s. The OGTS generation measurement interval is 1,200 s. The beacon clock correction measurement interval is 300 s.
4 Simulation results
4.1 Scenario 1. Static user in a south crater Boguslawsky
The first scenario shows the results of the case with a static user with a 0 db antenna, 5° mask angle, and 900 s sliding measurement interval with a 60 s step (Figure 9). The first solution has been obtained after 3,600 s spent for ODTS and the second update of the navigation messages. Positioning accuracy for this type of user is within 20 m (3σ). The same accuracy is achievable by rovers during route stops.

Static user positioning accuracy.
4.2 Scenario 2. Low orbital user
Similar results are shown in Figure 10 for the orbital user on a Chang’e 5 guessed circular orbit with a 200 km height and ∼42.5° inclination. Seven parameters are determined in this scenario including user velocity and clock correction. The sliding measurement interval is 900 s. An all-in view 0 db user antenna with no mask angle is taken in this scenario.

Orbital user positioning accuracy.
4.3 Scenario 3. Dynamic rover in a south pole crater Boguslawsky
In this scenario augmentation, beacons are used to estimate the full cycle of LNSS operations and to provide instantaneous solution for a dynamic user. As mentioned in time difference in Figures 11–14, after the first period of ephemeris determination (3,600 s), beacons started to accumulate measurements and after 300 s, the first batch of beacon clock correction was produced. At the next message update (5,400 s), the corrections reached the rover receiver, resulting in 20 m (3σ) accuracy for the following track.

Offset between satellite clocks and UTC.

On-board OD accuracy.

Offset between beacon clocks and UTC.

Rover positioning accuracy.
For all presented simulation scenarios, the positioning accuracy is within a few tens of meters considering not only constellation geometry but also on-board ODTS performance and user algorithms including signal processing and ephemeris propagation. The encouraging results give a strong ground for further LNSS development.
5 Conclusions
With the increased number of upcoming lunar missions, there will be a need to decrease the pressure on the ground facilities providing measurement and navigation services. The paper described the self-sufficient solution validated via full-cycle simulations of LNSS operations for the different types of users. The proposed LNSS concept could be adapted for Mars and other celestial bodies taking into account aspects such as their shape, dynamics, perturbations, as well as exploration priority regions.
-
Funding information: The authors state no funding involved.
-
Author contributions: All authors have accepted responsibility for the entire content of this manuscript and approved its submission.
-
Conflict of interest: The authors state no conflict of interest.
References
Baird D. 2021 January 5. NASA Explores Upper Limits of Global Navigation Systems for Artemis, nasa.gov.Search in Google Scholar
Barton G, Shepperd S, Brand T. 1993. Proposed autonomous lunar navigation system. Astrodynamics. 1717–1736.Search in Google Scholar
Bolkunov A, Serdyukov A, Ignatovich E, Kaplev S, Zolkin I. 2012. Some issues on development of the Lunar PNT System to support Moon exploration. Global Space Exploration Conference 2012. Washington, DC. GLEX-2012,02,4,10,x12389.Search in Google Scholar
Carpenter J, Folta D, Moreau M, Quinn D. 2004. Libration Point Navigation Concepts Supporting the Vision for Space Exploration. AIAA/AAS Astrodynamics Specialist Conference and Exhibit. Providence, Rhode Island.10.2514/6.2004-4747Search in Google Scholar
Chen H, Liu J, Xu Z, Meng Y, Zhang H. 2019. Lunar far side positioning enabled by a CubeSat system deployed in an Earth-Moon halo orbit. Adv Space Res. 64(1):28–41. 10.1016/j.asr.2019.03.031.Search in Google Scholar
Circi C, Romagnoli D, Fumenti F. 2014. Halo orbit dynamics and properties for a lunar global positioning system design. Mon Not R Astron Soc. 442(4):3511–3527. 10.1093/mnras/stu1085.Search in Google Scholar
Delépaut A, Schönfeldt M, Giordano P, Blonski D, Sarnadas R, Ries L, et al. 2019. A System Study for Cislunar Radio Navigation Leveraging the Use of Realistic Galileo and GPS Signals. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of The Institute of Navigation. Miami, Florida.10.33012/2019.17084Search in Google Scholar
Delépaut A, Giordano P, Ventura-Traveset J, Blonski D, Schönfeldt M, Schoonejans P, et al. 2020. Use of GNSS for lunar missions and plans for lunar in-orbit development. Adv Space Res. 66(12):2739–56. 10.1016/j.asr.2020.05.018.Search in Google Scholar
Folkner W, Williams J, Boggs D, Park R, Kuchynka P. 2014. The planetary and lunar ephemeris DE430 and DE431. JPL IPN Progress Report, p. 42–196Search in Google Scholar
Hagenau B, Peters B, Burton R, Hashemi K, Cramer N. 2021. Introducing The Lunar Autonomous PNT System (LAPS) Simulator. 2021 IEEE Aerospace Conference (50100). p. 1–11. 10.1109/AERO50100.2021.9438538.https://doi.org/10.1109/AERO50100.2021.9438538Search in Google Scholar
ISS Utilization: NICER/SEXTANT (Neutron-star Interior Composition ExploreR/Station Explorer for X-ray Timing and Navigation Technology). 2020. ESA Earth Observation Portal.Search in Google Scholar
Kaplev S, Kremenetskii N, Ignatovich E, Bolkunov A. 2019. Lunar navigation and communication satellite system constellation design for different coverage and service phases. 2019. All-Russian Sci-Tech J “Polyot” (“Flight”). 11:3–9.Search in Google Scholar
Parker J, Smith J, Forsman A, Rabotin C, Cain C, Cheetham B. 2019. The cislunar autonomous positioning system, CAPS. Adv Astron Sci. Guidance, Navigation Control. 2019. p. 169Search in Google Scholar
Pitjeva E, Pavlov D. 2017. EPM2017 and EPM2017H. Institute of Applied Astronomy RAS. St. Petersburg, Russia. https://iaaras.ru/en/dept/ephemeris/epm/2017/.Search in Google Scholar
Schönfeldt M, Grenier A, Delépaut A, Swinden R, Giordano P, Ventura-Traveset J. October 2020. Across the lunar landscape exploration with GNSS technology. InsideGNSS. 15(5):32–37.Search in Google Scholar
Schönfeldt M, Grenier A, Delépaut A, Swinden R, Giordano P, Ventura-Traveset J. December 2020. Across the lunar landscape towards a dedicated lunar PNT system. InsideGNSS. 15(6):30–37.Search in Google Scholar
Schönfeldt M, Grenier A, Delépaut A, Giordano P, Swinden R, Ventura-Traveset J, et al. 2020. A system study about a lunar navigation satellite transmitter system. 2020 European Navigation Conference (ENC). 2020 Nov 23–24; Dresden, Germany. IEEE, 2020. p. 1–10. 10.23919/ENC48637.2020.9317521.Search in Google Scholar
[UNOOSA] United Nations Office for Outer Space Affairs. 2018. The Interoperable Global Navigation Satellite Systems Space Service Volume. Vienna: United Nations Publication.Search in Google Scholar
Winternitz L, Bamford W, Long A, Hassouneh M. 2019. GPS based autonomous navigation study for the lunar gateway. In 42nd Annual American Astronautical Society (AAS) Guidance, Navigation and Control Conference. Breckenridge, CO, United States.Search in Google Scholar
© 2022 Sergey Kaplev et al., published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Research Articles
- Deep learning application for stellar parameters determination: I-constraining the hyperparameters
- Explaining the cuspy dark matter halos by the Landau–Ginzburg theory
- The evolution of time-dependent Λ and G in multi-fluid Bianchi type-I cosmological models
- Observational data and orbits of the comets discovered at the Vilnius Observatory in 1980–2006 and the case of the comet 322P
- Special Issue: Modern Stellar Astronomy
- Determination of the degree of star concentration in globular clusters based on space observation data
- Can local inhomogeneity of the Universe explain the accelerating expansion?
- Processing and visualisation of a series of monochromatic images of regions of the Sun
- 11-year dynamics of coronal hole and sunspot areas
- Investigation of the mechanism of a solar flare by means of MHD simulations above the active region in real scale of time: The choice of parameters and the appearance of a flare situation
- Comparing results of real-scale time MHD modeling with observational data for first flare M 1.9 in AR 10365
- Modeling of large-scale disk perturbation eclipses of UX Ori stars with the puffed-up inner disks
- A numerical approach to model chemistry of complex organic molecules in a protoplanetary disk
- Small-scale sectorial perturbation modes against the background of a pulsating model of disk-like self-gravitating systems
- Hα emission from gaseous structures above galactic discs
- Parameterization of long-period eclipsing binaries
- Chemical composition and ages of four globular clusters in M31 from the analysis of their integrated-light spectra
- Dynamics of magnetic flux tubes in accretion disks of Herbig Ae/Be stars
- Checking the possibility of determining the relative orbits of stars rotating around the center body of the Galaxy
- Photometry and kinematics of extragalactic star-forming complexes
- New triple-mode high-amplitude Delta Scuti variables
- Bubbles and OB associations
- Peculiarities of radio emission from new pulsars at 111 MHz
- Influence of the magnetic field on the formation of protostellar disks
- The specifics of pulsar radio emission
- Wide binary stars with non-coeval components
- Special Issue: The Global Space Exploration Conference (GLEX) 2021
- ANALOG-1 ISS – The first part of an analogue mission to guide ESA’s robotic moon exploration efforts
- Lunar PNT system concept and simulation results
- Special Issue: New Progress in Astrodynamics Applications - Part I
- Message from the Guest Editor of the Special Issue on New Progress in Astrodynamics Applications
- Research on real-time reachability evaluation for reentry vehicles based on fuzzy learning
- Application of cloud computing key technology in aerospace TT&C
- Improvement of orbit prediction accuracy using extreme gradient boosting and principal component analysis
- End-of-discharge prediction for satellite lithium-ion battery based on evidential reasoning rule
- High-altitude satellites range scheduling for urgent request utilizing reinforcement learning
- Performance of dual one-way measurements and precise orbit determination for BDS via inter-satellite link
- Angular acceleration compensation guidance law for passive homing missiles
- Research progress on the effects of microgravity and space radiation on astronauts’ health and nursing measures
- A micro/nano joint satellite design of high maneuverability for space debris removal
- Optimization of satellite resource scheduling under regional target coverage conditions
- Research on fault detection and principal component analysis for spacecraft feature extraction based on kernel methods
- On-board BDS dynamic filtering ballistic determination and precision evaluation
- High-speed inter-satellite link construction technology for navigation constellation oriented to engineering practice
- Integrated design of ranging and DOR signal for China's deep space navigation
- Close-range leader–follower flight control technology for near-circular low-orbit satellites
- Analysis of the equilibrium points and orbits stability for the asteroid 93 Minerva
- Access once encountered TT&C mode based on space–air–ground integration network
- Cooperative capture trajectory optimization of multi-space robots using an improved multi-objective fruit fly algorithm
Articles in the same Issue
- Research Articles
- Deep learning application for stellar parameters determination: I-constraining the hyperparameters
- Explaining the cuspy dark matter halos by the Landau–Ginzburg theory
- The evolution of time-dependent Λ and G in multi-fluid Bianchi type-I cosmological models
- Observational data and orbits of the comets discovered at the Vilnius Observatory in 1980–2006 and the case of the comet 322P
- Special Issue: Modern Stellar Astronomy
- Determination of the degree of star concentration in globular clusters based on space observation data
- Can local inhomogeneity of the Universe explain the accelerating expansion?
- Processing and visualisation of a series of monochromatic images of regions of the Sun
- 11-year dynamics of coronal hole and sunspot areas
- Investigation of the mechanism of a solar flare by means of MHD simulations above the active region in real scale of time: The choice of parameters and the appearance of a flare situation
- Comparing results of real-scale time MHD modeling with observational data for first flare M 1.9 in AR 10365
- Modeling of large-scale disk perturbation eclipses of UX Ori stars with the puffed-up inner disks
- A numerical approach to model chemistry of complex organic molecules in a protoplanetary disk
- Small-scale sectorial perturbation modes against the background of a pulsating model of disk-like self-gravitating systems
- Hα emission from gaseous structures above galactic discs
- Parameterization of long-period eclipsing binaries
- Chemical composition and ages of four globular clusters in M31 from the analysis of their integrated-light spectra
- Dynamics of magnetic flux tubes in accretion disks of Herbig Ae/Be stars
- Checking the possibility of determining the relative orbits of stars rotating around the center body of the Galaxy
- Photometry and kinematics of extragalactic star-forming complexes
- New triple-mode high-amplitude Delta Scuti variables
- Bubbles and OB associations
- Peculiarities of radio emission from new pulsars at 111 MHz
- Influence of the magnetic field on the formation of protostellar disks
- The specifics of pulsar radio emission
- Wide binary stars with non-coeval components
- Special Issue: The Global Space Exploration Conference (GLEX) 2021
- ANALOG-1 ISS – The first part of an analogue mission to guide ESA’s robotic moon exploration efforts
- Lunar PNT system concept and simulation results
- Special Issue: New Progress in Astrodynamics Applications - Part I
- Message from the Guest Editor of the Special Issue on New Progress in Astrodynamics Applications
- Research on real-time reachability evaluation for reentry vehicles based on fuzzy learning
- Application of cloud computing key technology in aerospace TT&C
- Improvement of orbit prediction accuracy using extreme gradient boosting and principal component analysis
- End-of-discharge prediction for satellite lithium-ion battery based on evidential reasoning rule
- High-altitude satellites range scheduling for urgent request utilizing reinforcement learning
- Performance of dual one-way measurements and precise orbit determination for BDS via inter-satellite link
- Angular acceleration compensation guidance law for passive homing missiles
- Research progress on the effects of microgravity and space radiation on astronauts’ health and nursing measures
- A micro/nano joint satellite design of high maneuverability for space debris removal
- Optimization of satellite resource scheduling under regional target coverage conditions
- Research on fault detection and principal component analysis for spacecraft feature extraction based on kernel methods
- On-board BDS dynamic filtering ballistic determination and precision evaluation
- High-speed inter-satellite link construction technology for navigation constellation oriented to engineering practice
- Integrated design of ranging and DOR signal for China's deep space navigation
- Close-range leader–follower flight control technology for near-circular low-orbit satellites
- Analysis of the equilibrium points and orbits stability for the asteroid 93 Minerva
- Access once encountered TT&C mode based on space–air–ground integration network
- Cooperative capture trajectory optimization of multi-space robots using an improved multi-objective fruit fly algorithm