Realization of optimization design of electromechanical integration PLC program system based on 3D model
-
Lili Zhang
 ,
Skanda M. G.
,
Skanda M. G.

Abstract
A three-dimensional simulation model of the electromechanical control system was built using the fuzzy control proportional–integral–derivative (PID) adjustment algorithm after an automatic electromechanical control system based on programmable logic controller (PLC) technology was optimized to achieve the practical use of electromechanical program control. First, the hardware of the electromechanical control system is discussed and designed. The findings demonstrate the viability of the mechanical and electrical integration PLC program optimization solution based on three-dimensional (3D) model. The system has a higher control and management efficiency, which is 30% greater than that of the conventional system. The mechatronic manufacturing system’s continuous operation efficiency enhancement can significantly lower the investment costs and boost the financial gains of industrial organizations. Traditional systems have a control and management efficiency of around 30%, but automatic electromechanical control systems based on PLC technology and created using 3D models have a control and management efficiency between 60 and 70%.
1 Introduction
Mechatronics technology is the organic combination of machinery, electrical and electronic, microelectronics, sensors, interfaces, information, signal transformation, and other technologies, and three-dimensional (3D) electromechanical integration technology refers to optics, electronics, mechanics, information processing and control, and special software and other related new technologies in the 3D space for comprehensive integration of an advanced technology, it is the basis of many high-tech industries and high-tech equipment. The system is mainly composed of power, mechanism, actuator, computer, and sensor. It includes two aspects: product and technology. Mechatronics product is a collection of microelectronics, machinery, automatic control, and communication technology in one of the high-tech products, with high function and added value. Mechatronics technology refers to its technical principles and make mechatronics products to achieve, use and develop technology, its development and progress depends on the development and progress of related technologies. Electromechanical automation Control technology, which mainly includes programmable logic controller (PLC) control and relay control, can save money, human resources, and time. They also improve manufacturing efficiency and control precision. At the present stage, relay control has gradually exposed many shortcomings, such as complex wiring of the induration point, high cost, complex modification, vulnerable to external influence, etc. [1]. A commercial computer control system called PLC continuously analyses the status of input devices and decides how to regulate the state of output devices based on a unique program. PLCs are essential in the automation industry. As per the system’ operational requirements, a PLC can be programmed. Reprogramming will be required in the industrial sector due to the shift in the nature of output. PLC-based control reforms were developed to help this issue.
The PLC uses a programmable memory to store internal programs and execute user-oriented instructions such as logical operations, sequential control, timing, counting, and arithmetic operations, and through the digital or analog input and output, controls various types of machinery or production process, representing today’s electrical program control of the world’s advanced level. Relatively speaking, PLC technology has more high-quality logic, stability, sensitivity, the need for less human participation, the main human work is to write the program, because the modification of the program is convenient, strong computing ability, so its application is increasingly widespread. Automatic control technology uses PLC, solid-state electronic devices, and optical sensors to replace the traditional hard-wired electromechanical control circuit, which is often used in production. At present, it has a wide range of applications in the field of mechanical and electrical engineering automation control, automobile manufacturing control, mechanical structure system control, electrical automation control, and other fields, and even in the field of military defense. Based on this, an automatic electromechanical control system based on PLC technology of 3D model is designed to realize advanced motion and process control of production line. The technology used in order to attain, use, and produce mechatronics goods is referred to as mechatronics. The development and advancement of this technology is dependent upon the advancement of associated technologies. Research on mechatronics platform has been gaining momentum over the past few decades. Developed nations like Europe and America have made greater strides in this technology platform as a result of the early industrial revolution.
From 1960s, mechatronics technology began to enter people’s vision, and then relying on the industrial revolution, skill innovation, and even war, whether it is the country, government, enterprises, or residents, people’s demand for this technology started expanding. With the huge demand, and depending on the social environment of the time and the continuous integration of various advanced technologies, mechatronics technology after a number of stages of step by step development advanced towards maturity. And mechatronics platform is in the recent decades of time gradually hot up, foreign research on mechatronics training platform earlier, developed countries such as Europe and America have achieved more achievements in platform technology due to the early industrial revolution. In the United States, colleges and universities attach great importance to mechatronics technology, such as the University of Connecticut invested a lot of research on the mechatronics platform, some new ideas and solutions are proposed for the fault diagnosis of some platforms. In addition, Japan, a big robot country, has spared no effort in the development and utilization of mechatronics platform, such as the use of advanced 3D mechatronics technology for civilian robots, while developing technology, it also enriches people’s daily life. India, as an electronic power, is developing electronics related industries, the integration of mechanical and electrical integration technology has also invested a great deal of human and financial resources, the whole country of mechanical and electrical integration engineering education is very early, it has been exposed to the concept of mechatronics since middle school. In addition, in countries, such as Jordan, the development of mechatronics courses is also earlier than our country, therefore, these countries have established their own research mode, and continue to use advanced technology to develop national strength. The advantages of 3D technology offers a great degree of flexibility for system modification or redesign. The reputation and return are better when parts and products are produced as per international standards. It meets the needs of high dimensional precision successfully. Mechatronic systems provide high productivity in industrial organizations. Whereas there are also some disadvantages such as repair and maintenance, which may prove expensive. Design and construction require a foundation in multiple engineering disciplines. When choosing a mechatronic system, substantial techno-economic analysis must be made. The process of identifying issues with systems and fixing them is complicated.
China has made certain achievements in electromechanical integration technology domestically at present, this is especially evident in numerical control technology, robotics, and computer integrated manufacturing (CIM) systems. Since China started studying numerical control technology, it has essentially had the capacity for self-research and development. As a result, it has established a number of numerical control research and development centers as well as production facilities across the nation. As of now, China’s numerical control technology industry produces more than 3,000 sets of numerical control systems annually, making it a key product in advancing the growth of the country’s economy. Additionally, after almost 30 years of work. China has mastered the robot operation design and manufacturing technology, control and software programming, and other key technologies. At present, the robot operation has been widely used in industry, and gradually involved in medical treatment and underwater exploration and other aspects, it also occupies a place in national defense. The term CIM is being used to characterize the automation of a production plant, including all operations being performed within computer control and being connected by digital data. CIM is a method for automating industrial processes through computers. The automation of processes including analysis, standard costing, construction, transportation, stock control, scheduling, and procurement is a frequent practice in factories. In the CIM system, China has made great progress in recent years, and has also mastered some key technologies, which are widely being used in many domestic enterprises, and has achieved good economic benefits. However, we have not made a breakthrough in its nuclear private technology, and some products can only be researched and produced with the support of foreign technology. Some scholars have carried out relevant research works on mechatronic integration platform. Petti et al. introduced the idea of outcome-based education in the practical training and teaching system of mechatronic integration to promote teaching by combining virtual and real [2]. Wen et al. carried out technical innovation on the mechatronics practical training device by improving the technology, in order to better apply it to teaching and training [3]. Vedova and Berri applied the single-chip microcomputer technology to the electromechanical control system platform, and the integration of these advanced technologies promoted the development of the electromechanical integration platform from multiple aspects [4]. For complicated systems to work as intended, mechatronic design of intelligent manufacturing actions is crucial and necessitates close mechanical and control engineering integration [5]. By combining basic mental readiness with robotic precision, the collaboration of robots and people in multiple cloud offers a good exchange among variability, excellent quality, and cheap prices [6]. If design flaws are discovered during the typical irreversible design approach’s deployment phase, hardware-in-the-loop simulation using digital twins could be employed to prevent the high expense of production system modification [7]. The Internet of Things will be realized within the setting of the factory to realize a substantially better level of adaptiveness of production environments, according to the concept of the fourth industrial revolution [8].
2 PLC technology
PLC is a programmable memory to store the controller’s internal program instructions, the execution of timing, logical operations, sequence control, counting and arithmetic operations, etc., which gives commands with the help of digital analog input and output, to control the production process of various types of machinery. PLC is like the hardware in the microcomputer, but independent of the central processing unit (CPU) and the control panel, so the electromechanical integration production data collection, analysis, and processing, with its own powerful programming function, can effectively simplify the work flow, improve the processing efficiency, optimize the wiring technology, and save unnecessary maintenance and operation costs.
The main design content of PLC system includes the following aspects: First is to ensure the quality of the system equipment, according to production control requirements, technical conditions, and other equipment selection, so as not to affect the overall safety and effectiveness of the system; Second is to combine the application characteristics of the program software writing, and design and write software to meet the industry requirements; Third, compiling PLCI/O assignment table and drawing input sub-wiring diagram. According to the user’s operation requirements, complete the interface design through parameter setting, highlighting the friendliness and humanization of the interface; Fourth is the optimization of the system after the end of the design, to ensure that the parameters are scientific and reasonable, and the preparation of the operation manual, mark and explain PLC operation and process with drawings to improve the system application connection effect. Of course, the PLC system design is not only reflected in the principle level, the key is to give full play to the PLC system through the software and hardware cooperation in the electromechanical integration control efficiency.
3 Design of PLC electromechanical control system based on 3D model
3.1 Basic structure of PLC system
A PLC system generally consists of a CPU, a programmer, a system program memory, a display unit, and a power supply (as shown in Figure 1) [9]. The PLC’s CPU, which executes programmed actions, is its brain. Depending on the signals and information provided by the associated inputs, certain activities or outputs are carried out. The power supply supplies power to the PLC by transforming the accessible AC power to the DC power needed by the CPU and I/O modules to function effectively. In facility with many inputs and outputs, PLCs were created to eliminate the requirement for a sizable bank of relays or timers. PLCs have been adopted as a standard in contemporary production because of their dependability and capacity to automate numerous procedures.
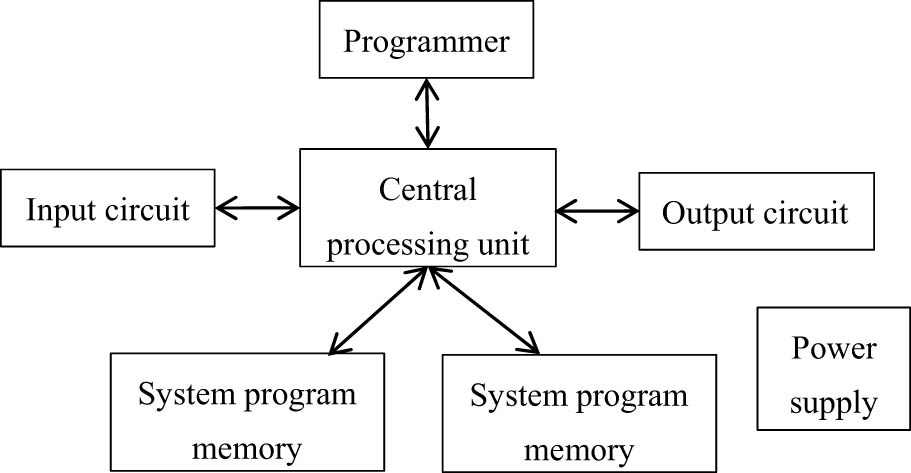
Basic structure of PLC system.
3.2 System design process
In order to improve the comprehensive design quality of the electromechanical system, it is necessary to have a scientific design planning. Figure 2 shows the typical process of mechanical and electrical product design. The process starts with analyzing requirements and determining product function and performance parameters. Then we can determine the overall design scheme and demonstration that divides function modules, design goals, function module and interface design, and so on. Similarly all processes has been followed as shown in Figure 2.
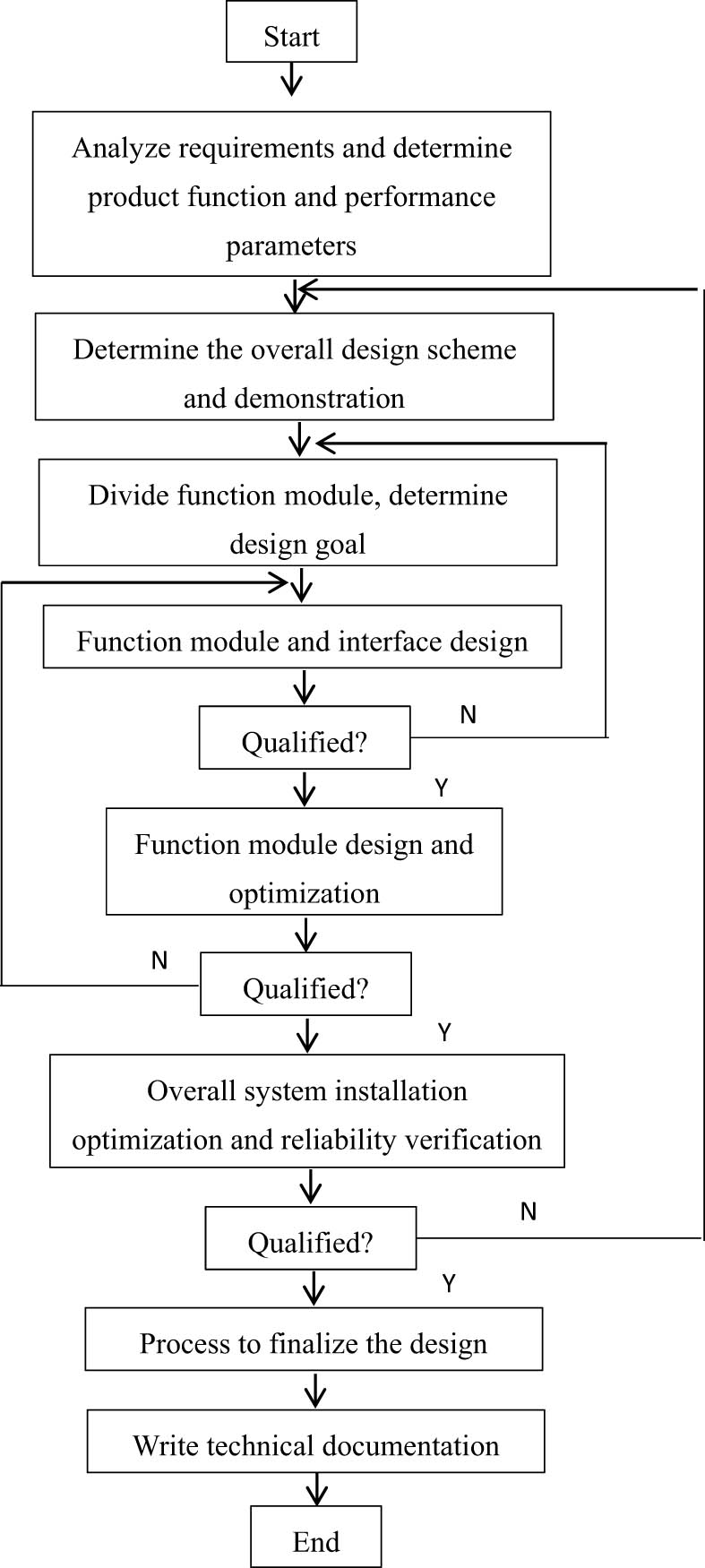
Typical mechanical and electrical product design process.
3.3 Controller design
PLC electromechanical control system in the system structure should be composed of PLC, input and output module, programmer, independent power module, CPLI, PC/PCL connection, programming software, and other parts, this system chooses Siemens 300 series PCL as the controller. The focus of control system design is the design of servo connection circuit, including servo communication circuit, driver and controller wiring diagram, and power circuit. The main circuit is contacted and connected to the reactor through five ports of the driver, and the motion controller is mainly connected to the driver through six ports. The controller design diagram should include the circuit of each module, namely:
CPU as the core circuit, used for the management and control of two solenoid valves, “on and off,” and electric pump speed regulation, CPU decoding three buses and a bus driver, memory expansion, WDT, and other circuits.
Input/output circuit;
Communication interface circuit;
Printer interface circuit;
Display circuit;
Power supply circuit.
3.3.1 Power supply design and other hardware
PLC controller usually operates at relatively low voltage, but the external control components mainly work in the case of strong current, easy to cause different degrees of influence on the controller. Therefore, the power supply needs to provide stable, strong, and weak power for the controller's operation. In addition, the power supply involved in the external control components and the controller should be effectively isolated from the power supply during the design. The power supply voltage selection range of the servo driver is 12–24 V [10,11].
The sensor can convert the analog signal into electrical signal, and then convert it into digital signal through the transmitter for acquisition. Therefore, physical quantities such as ambient temperature, mechanical pressure, liquid flow, gas composition, and other measured signals can be converted into digital signals. The actuator can be divided into three types: pneumatic, electric, and hydraulic. Its function is to receive the control signal sent by the computer and convert it into mechanical action. PLC is similar to the hardware of a microcomputer, but it operates independent of the CPU and the control panel. The layout of the hydraulic link circuit, which includes the servo communication controller, driver and controller wiring schematic, and electronic controller, is the main emphasis of control design. The PLC controller typically works at a fairly low voltage, while the outer control elements mostly function at high current levels, making it simple to impact the controller to varying degrees.
3.4 Software design
System software includes communication system, sensor software, data conversion software, computing software, and control management software. In order to efficiently connect the hardware parts, the corresponding communication settings can be added. The sensor processing system processes the transmitted signal based on Eq. (1).
where M is the processed signal; a is the initial signal value; γ is the standard value; and k is the signal weight.
In order to improve the nonlinear error and delay in automatic control, the 3D fuzzy control PID algorithm is used to design the system control software. The 3D PID algorithm has strong adaptability, better robustness, and higher adjustment accuracy to various control systems, which can improve the effectiveness of automatic electromechanical control.
3D fuzzy control is divided into three steps:
The precision deviation E and the deviation variation EC are blurred into E and EC;
Inference result U is obtained by inferring the fuzzy control table;
Transform the fuzzy decision U into an exact value for the actual parameter setting. Quantization factor
where
where
Based on the above principles, the fuzzy controller [12,13] is established by taking all parameters and using Eqs. (5) and (6).
The control software of the electromechanical system includes the upper computer and the lower computer, and the data are transmitted between the upper and lower computers through PN network. The program of the next machine is: Main program block, data block, function block, and other structures. Function block is called by the main program, which can realize data acquisition, out-of-limit alarm, control output, real-time clock (including absolute clock and relative clock), human–machine interaction and other functions. PLC programming combined with statement Table and ladder diagram, the following part of the main block of statements:
Check sensor overview display in HMI
CALL“FC_CHECK_SENSOR”
call manager for manual movements
CALL“FC_Manager_Manual”
call sequence chains (S7 GRAPH)
CALL“FC_Manager_Chains_Auto”
The programs of the upper computer include: Main screen, parameter setting, operation mode switching, production information, alarm query, account management, and other functions. The controller can run on common operating systems, and the human–computer interface of the lower computer can be developed in a variety of environments. However, the interpolation algorithm of this scheme is implemented in real time, so the workload is large and the complexity of the whole system is high. The designed control system completes the human–computer interaction with the lower computer, and adopts interpolation algorithm to calculate the motion control core, which greatly reduces the real-time performance requirements of the controller.
3.5 Realization of electromechanical control system
After the design is completed, the 3D model system is gradually optimized. The optimization is divided into two steps:
System optimization. According to the controller design circuit, connect each hardware part; optimize to achieve the target function. After the hardware optimization is completed, the matching optimization of program software is carried out.
Site optimization. After laboratory optimization, the site needs to select reasonable adjustment parameters, pay attention to grounding, environmental interference, and other problems, to ensure the stable operation of the system, to achieve performance indicators, and improve the design scheme.
The hardware design and software design of each circuit were carried out by combining the 3D model PLC controller type software design using Siemens PLC programmable control software STEP7 special operation instructions to complete the compilation of the system program and with the hardware to optimize the connection through the optimization of the mechanical and electrical system automation control. Among them, the software design will be modular software, respectively classified into each subroutine, by the host integrated management control process. Finally, the module is simulated to complete the operation of each subroutine in the control system to verify the realization of the designed system.
4 Validity test
The work efficiency of automatic electromechanical control system based on PLC technology and PID algorithm of fuzzy control of 3D model is analyzed, and the effectiveness is verified by comparative experiment. Because the traditional way to be compared is different from the control way of 3D model system, it cannot be compared directly. Therefore, third-party software is introduced to record the efficiency of system management and control. Because the two electromechanical control systems are distinct, the control methodology also differs. Setting uniform experimental conditions for the external environment is required to produce processes and outcomes that are more precise and trustworthy. The standard non-automatic electromechanical control system and the control system based on PLC technology’s management and control efficiencies were compared in this study through numerous tests, and the comparison primarily served to demonstrate the system’s effectiveness. Comparative investigation reveals that the system developed using the 3D model has a control management efficiency that is around 30% greater than the system designed using the traditional method.
Conditional parameter settings: In the process of the experiment, the control method is also different because of the difference between the two electromechanical control systems. In order to obtain more accurate and reliable process and results, it is necessary to set uniform experimental parameters of external environment. The setting results of conditional parameters are shown in Table 1 [14,15].
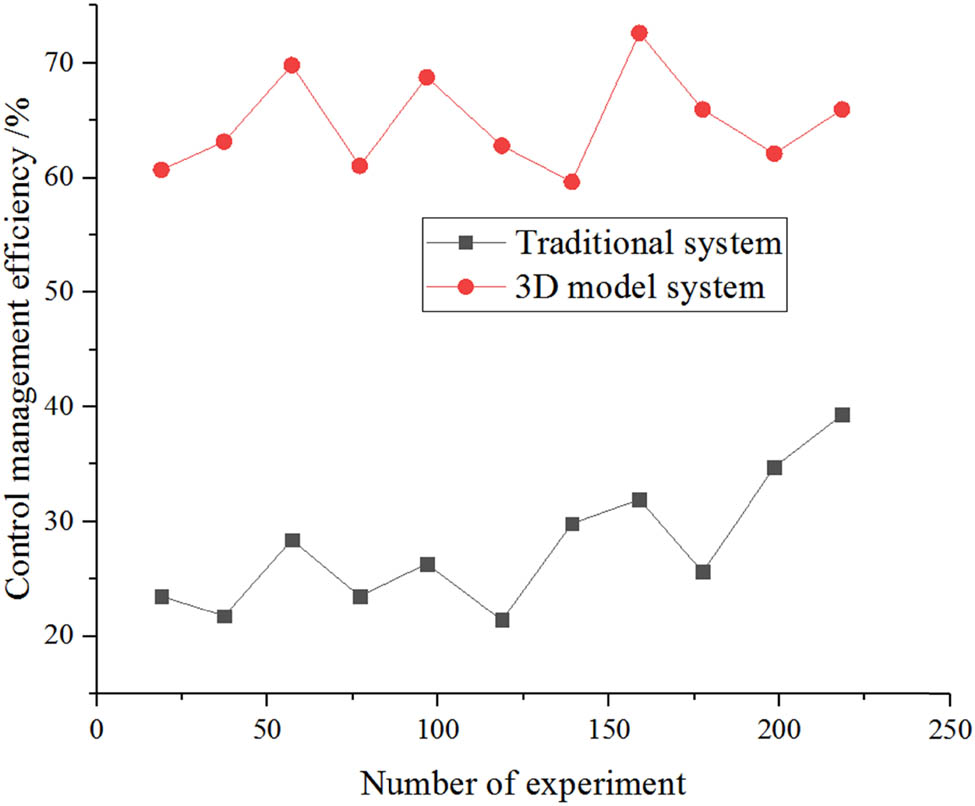
Compare experimental results: Through many experiments, the management and control efficiency of the conventional non-automatic electromechanical control system and the control system based on the PLC technology in this study are obtained, and the effectiveness of the system is verified mainly from the comparison of the control and management efficiency [16]. From 20–220 experiments, the control management efficiency of the traditional system and the 3D model system is obtained. The records of every 20 experiments are taken for calculation, and the results are shown in Figure 3.
Experimental condition setting
| Classification standard | Parameter |
|---|---|
| Temperature/℃ | 20 |
| Voltage/V | 24 |
| Data selection/times | 12 |
| Number of experiments/numbers | 20–220 |
Experimental comparison results.
The usefulness of a 3D model’s automatic electromechanical control system based on PLC technology and the PID fuzzy control algorithm is examined, and their efficiencies are confirmed by a comparative experiment. It is impossible to directly compare using the two traditional comparison methods since they differ from the 3D model system’s control method. It can be seen from Figure 3 that the control and management efficiency of the traditional system can reach about 30%, while the control and management efficiency of the automatic electromechanical control system based on PLC technology designed based on the 3D model can reach 60–70% [17]. Comparative analysis shows that the control management efficiency of the system designed based on the 3D model is about 30% higher than that of the conventional system [18].
5 Conclusion
The use of PLC based on 3D model strengthening in mechatronics production systems may better conform to the trend of rapid development of science and technology. Therefore, the electromechanical integration of the production chain should make reasonable use of PLC technology, which has the qualities of clear logic and zero error calculation. PLC technology and three-dimensional models should be integrated by technical staff in order to guarantee that the mechanical and electrical integration of production systems operate with steadily increasing efficiency, effectively lower investment costs, increase the economic benefits of industrial enterprises, and fully exploit the potential of 3D model PLC technology. The results show that the PLC program optimization approach based on a 3D model for mechanical and electrical integration is viable. The system’s control and management efficiency is 30% higher than that of the traditional system. In future we will propose the virtual prototyping and digital manufacturing as a strategic support for the analysis and synthesis of the technological solutions, particularly those linked to human–robot cooperation, to suggest an engineering technique for designing and optimizing.
-
Funding information: The authors state no funding involved.
-
Author contributions: All authors have accepted responsibility for the entire content of this manuscript and approved its submission.
-
Conflict of interest: The authors state no conflict of interest.
-
Data availability statement: The data shall be made available on request.
References
[1] Youness R, Messine F. An implementation of adjoint-based topology optimization in magnetostatics application to design hall-effect thrusters. COMPEL - Int J Comput Math Electr Electron Eng. 2019;38(3):1023–35.10.1108/COMPEL-09-2018-0379Suche in Google Scholar
[2] Petti G, Quattrocchi G, Vedova MDLD. Optimization methodologies study for the development of prognostic artificial neural network. Int J Mech Control. 2021;22(1):3–9.Suche in Google Scholar
[3] Wen BJ, Lin YS, Tu HM, Hsieh CC. Health-diagnosis of electromechanical system with a principal-component Bayesian neural network algorithm. J Intell Fuzzy Syst. 2020;40(2):1–10.10.3233/JIFS-189587Suche in Google Scholar
[4] Vedova M, Berri PC. Optimization techniques for prognostics of on-board electromechanical servomechanisms affected by progressive faults. Int Rev Aerosp Eng. 2019;12(4):160–70.10.15866/irease.v12i4.17356Suche in Google Scholar
[5] Pellicciari M, Andrisano AO, Leali F, Vergnano A. Engineering method for adaptive manufacturing systems design. Int J Interact Des Manuf. 2009;3:81–91. 10.1007/s12008-009-0065-9.Suche in Google Scholar
[6] Andrisano AO, Leali F, Pellicciari M, Pini F, Vergnano A. Hybrid reconfigurable system design and optimization through virtual prototyping and digital manufacturing tools. Int J Interact Des Manuf. 2012;6:17–27. 10.1007/s12008-011-0133-9.Suche in Google Scholar
[7] Liu Q, Leng J, Yan D, Zhang D, Wei L, Yu A, et al. Digital twin-based designing of the configuration, motion, control, and optimization model of a flow-type smart manufacturing system. J Manuf Syst. 2021;58:52–64.10.1016/j.jmsy.2020.04.012Suche in Google Scholar
[8] Weyer S, Schmitt M, Ohmer M, Gorecky D. Towards Industry 4.0-Standardization as the crucial challenge for highly modular, multi-vendor production systems. IFAC-PapersOnLine. 2015;48(3):579–84.10.1016/j.ifacol.2015.06.143Suche in Google Scholar
[9] Yücel F, Surer E. Implementation of a generic framework on crowd simulation: a new environment to model crowd behavior and design video games. Mugla J Sci Technol. 2020;6(2):69–78.10.22531/muglajsci.706841Suche in Google Scholar
[10] Li Z, Zheng L, Ren Y, Li Y, Xiong Z. Multi-objective optimization of active suspension system in electric vehicle with in-wheel-motor against the negative electromechanical coupling effects. Mech Syst Signal Process. 2019;116(Feb. 1):545–65.10.1016/j.ymssp.2018.07.001Suche in Google Scholar
[11] Chen Y, Li Z, Zeng T, Ning Y, Bin Z. Research and design of 3D reconstruction system based on binocular vision. Int Core J Eng. 2019;5(12):29–35.Suche in Google Scholar
[12] Debich B, Yaich A, Dammak K, Hami AE, Haddar M. Integration of multi-objective reliability-based design optimization into thermal energy management: Application on phase change material-based heat sinks. J Energy Storage. 2021;41(8–9):102906.10.1016/j.est.2021.102906Suche in Google Scholar
[13] Razavi H, Salarieh H, Alasty A. Optimization-based gravity-assisted calibration and axis alignment of 9-degrees of freedom inertial measurement unit without external equipment. Proc Inst Mech Eng. 2020;234(2):192–207.10.1177/0954410019861778Suche in Google Scholar
[14] Horoshko V. Control optimization of electromechanical systems by fractional-integral controllers. Technol Audit Prod Reserves. 2020;3(2):53, 56–9.10.15587/2706-5448.2020.207037Suche in Google Scholar
[15] Chen R, Sharma A. Construction of complex environmental art design system based on 3D virtual simulation technology. Int J Syst Assur Eng Manag. 2021;1–8. 10.1007/s13198-021-01104-z.Suche in Google Scholar
[16] Setiadi H, Mithulananthan N, Krismanto AU, Kamwa I. Optimization based design of dual input PSS for improving small signal stability of power system with RESs. Int J Electr Eng Inform. 2019;11(4):778–95.10.15676/ijeei.2019.11.4.10Suche in Google Scholar
[17] Jia Z, Sharma A. Review on engine vibration fault analysis based on data mining. J Vibroeng. 2021;23(6):1433–45. 10.21595/jve.2021.21928.Suche in Google Scholar
[18] Liang M. Optimization of quantitative financial data analysis system based on deep learning. Complexity. 2021;2021(1):1–11.10.1155/2021/5527615Suche in Google Scholar
© 2023 the author(s), published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Artikel in diesem Heft
- Research Articles
- The regularization of spectral methods for hyperbolic Volterra integrodifferential equations with fractional power elliptic operator
- Analytical and numerical study for the generalized q-deformed sinh-Gordon equation
- Dynamics and attitude control of space-based synthetic aperture radar
- A new optimal multistep optimal homotopy asymptotic method to solve nonlinear system of two biological species
- Dynamical aspects of transient electro-osmotic flow of Burgers' fluid with zeta potential in cylindrical tube
- Self-optimization examination system based on improved particle swarm optimization
- Overlapping grid SQLM for third-grade modified nanofluid flow deformed by porous stretchable/shrinkable Riga plate
- Research on indoor localization algorithm based on time unsynchronization
- Performance evaluation and optimization of fixture adapter for oil drilling top drives
- Nonlinear adaptive sliding mode control with application to quadcopters
- Numerical simulation of Burgers’ equations via quartic HB-spline DQM
- Bond performance between recycled concrete and steel bar after high temperature
- Deformable Laplace transform and its applications
- A comparative study for the numerical approximation of 1D and 2D hyperbolic telegraph equations with UAT and UAH tension B-spline DQM
- Numerical approximations of CNLS equations via UAH tension B-spline DQM
- Nonlinear numerical simulation of bond performance between recycled concrete and corroded steel bars
- An iterative approach using Sawi transform for fractional telegraph equation in diversified dimensions
- Investigation of magnetized convection for second-grade nanofluids via Prabhakar differentiation
- Influence of the blade size on the dynamic characteristic damage identification of wind turbine blades
- Cilia and electroosmosis induced double diffusive transport of hybrid nanofluids through microchannel and entropy analysis
- Semi-analytical approximation of time-fractional telegraph equation via natural transform in Caputo derivative
- Analytical solutions of fractional couple stress fluid flow for an engineering problem
- Simulations of fractional time-derivative against proportional time-delay for solving and investigating the generalized perturbed-KdV equation
- Pricing weather derivatives in an uncertain environment
- Variational principles for a double Rayleigh beam system undergoing vibrations and connected by a nonlinear Winkler–Pasternak elastic layer
- Novel soliton structures of truncated M-fractional (4+1)-dim Fokas wave model
- Safety decision analysis of collapse accident based on “accident tree–analytic hierarchy process”
- Derivation of septic B-spline function in n-dimensional to solve n-dimensional partial differential equations
- Development of a gray box system identification model to estimate the parameters affecting traffic accidents
- Homotopy analysis method for discrete quasi-reversibility mollification method of nonhomogeneous backward heat conduction problem
- New kink-periodic and convex–concave-periodic solutions to the modified regularized long wave equation by means of modified rational trigonometric–hyperbolic functions
- Explicit Chebyshev Petrov–Galerkin scheme for time-fractional fourth-order uniform Euler–Bernoulli pinned–pinned beam equation
- NASA DART mission: A preliminary mathematical dynamical model and its nonlinear circuit emulation
- Nonlinear dynamic responses of ballasted railway tracks using concrete sleepers incorporated with reinforced fibres and pre-treated crumb rubber
- Two-component excitation governance of giant wave clusters with the partially nonlocal nonlinearity
- Bifurcation analysis and control of the valve-controlled hydraulic cylinder system
- Engineering fault intelligent monitoring system based on Internet of Things and GIS
- Traveling wave solutions of the generalized scale-invariant analog of the KdV equation by tanh–coth method
- Electric vehicle wireless charging system for the foreign object detection with the inducted coil with magnetic field variation
- Dynamical structures of wave front to the fractional generalized equal width-Burgers model via two analytic schemes: Effects of parameters and fractionality
- Theoretical and numerical analysis of nonlinear Boussinesq equation under fractal fractional derivative
- Research on the artificial control method of the gas nuclei spectrum in the small-scale experimental pool under atmospheric pressure
- Mathematical analysis of the transmission dynamics of viral infection with effective control policies via fractional derivative
- On duality principles and related convex dual formulations suitable for local and global non-convex variational optimization
- Study on the breaking characteristics of glass-like brittle materials
- The construction and development of economic education model in universities based on the spatial Durbin model
- Homoclinic breather, periodic wave, lump solution, and M-shaped rational solutions for cold bosonic atoms in a zig-zag optical lattice
- Fractional insights into Zika virus transmission: Exploring preventive measures from a dynamical perspective
- Rapid Communication
- Influence of joint flexibility on buckling analysis of free–free beams
- Special Issue: Recent trends and emergence of technology in nonlinear engineering and its applications - Part II
- Research on optimization of crane fault predictive control system based on data mining
- Nonlinear computer image scene and target information extraction based on big data technology
- Nonlinear analysis and processing of software development data under Internet of things monitoring system
- Nonlinear remote monitoring system of manipulator based on network communication technology
- Nonlinear bridge deflection monitoring and prediction system based on network communication
- Cross-modal multi-label image classification modeling and recognition based on nonlinear
- Application of nonlinear clustering optimization algorithm in web data mining of cloud computing
- Optimization of information acquisition security of broadband carrier communication based on linear equation
- A review of tiger conservation studies using nonlinear trajectory: A telemetry data approach
- Multiwireless sensors for electrical measurement based on nonlinear improved data fusion algorithm
- Realization of optimization design of electromechanical integration PLC program system based on 3D model
- Research on nonlinear tracking and evaluation of sports 3D vision action
- Analysis of bridge vibration response for identification of bridge damage using BP neural network
- Numerical analysis of vibration response of elastic tube bundle of heat exchanger based on fluid structure coupling analysis
- Establishment of nonlinear network security situational awareness model based on random forest under the background of big data
- Research and implementation of non-linear management and monitoring system for classified information network
- Study of time-fractional delayed differential equations via new integral transform-based variation iteration technique
- Exhaustive study on post effect processing of 3D image based on nonlinear digital watermarking algorithm
- A versatile dynamic noise control framework based on computer simulation and modeling
- A novel hybrid ensemble convolutional neural network for face recognition by optimizing hyperparameters
- Numerical analysis of uneven settlement of highway subgrade based on nonlinear algorithm
- Experimental design and data analysis and optimization of mechanical condition diagnosis for transformer sets
- Special Issue: Reliable and Robust Fuzzy Logic Control System for Industry 4.0
- Framework for identifying network attacks through packet inspection using machine learning
- Convolutional neural network for UAV image processing and navigation in tree plantations based on deep learning
- Analysis of multimedia technology and mobile learning in English teaching in colleges and universities
- A deep learning-based mathematical modeling strategy for classifying musical genres in musical industry
- An effective framework to improve the managerial activities in global software development
- Simulation of three-dimensional temperature field in high-frequency welding based on nonlinear finite element method
- Multi-objective optimization model of transmission error of nonlinear dynamic load of double helical gears
- Fault diagnosis of electrical equipment based on virtual simulation technology
- Application of fractional-order nonlinear equations in coordinated control of multi-agent systems
- Research on railroad locomotive driving safety assistance technology based on electromechanical coupling analysis
- Risk assessment of computer network information using a proposed approach: Fuzzy hierarchical reasoning model based on scientific inversion parallel programming
- Special Issue: Dynamic Engineering and Control Methods for the Nonlinear Systems - Part I
- The application of iterative hard threshold algorithm based on nonlinear optimal compression sensing and electronic information technology in the field of automatic control
- Equilibrium stability of dynamic duopoly Cournot game under heterogeneous strategies, asymmetric information, and one-way R&D spillovers
- Mathematical prediction model construction of network packet loss rate and nonlinear mapping user experience under the Internet of Things
- Target recognition and detection system based on sensor and nonlinear machine vision fusion
- Risk analysis of bridge ship collision based on AIS data model and nonlinear finite element
- Video face target detection and tracking algorithm based on nonlinear sequence Monte Carlo filtering technique
- Adaptive fuzzy extended state observer for a class of nonlinear systems with output constraint
Artikel in diesem Heft
- Research Articles
- The regularization of spectral methods for hyperbolic Volterra integrodifferential equations with fractional power elliptic operator
- Analytical and numerical study for the generalized q-deformed sinh-Gordon equation
- Dynamics and attitude control of space-based synthetic aperture radar
- A new optimal multistep optimal homotopy asymptotic method to solve nonlinear system of two biological species
- Dynamical aspects of transient electro-osmotic flow of Burgers' fluid with zeta potential in cylindrical tube
- Self-optimization examination system based on improved particle swarm optimization
- Overlapping grid SQLM for third-grade modified nanofluid flow deformed by porous stretchable/shrinkable Riga plate
- Research on indoor localization algorithm based on time unsynchronization
- Performance evaluation and optimization of fixture adapter for oil drilling top drives
- Nonlinear adaptive sliding mode control with application to quadcopters
- Numerical simulation of Burgers’ equations via quartic HB-spline DQM
- Bond performance between recycled concrete and steel bar after high temperature
- Deformable Laplace transform and its applications
- A comparative study for the numerical approximation of 1D and 2D hyperbolic telegraph equations with UAT and UAH tension B-spline DQM
- Numerical approximations of CNLS equations via UAH tension B-spline DQM
- Nonlinear numerical simulation of bond performance between recycled concrete and corroded steel bars
- An iterative approach using Sawi transform for fractional telegraph equation in diversified dimensions
- Investigation of magnetized convection for second-grade nanofluids via Prabhakar differentiation
- Influence of the blade size on the dynamic characteristic damage identification of wind turbine blades
- Cilia and electroosmosis induced double diffusive transport of hybrid nanofluids through microchannel and entropy analysis
- Semi-analytical approximation of time-fractional telegraph equation via natural transform in Caputo derivative
- Analytical solutions of fractional couple stress fluid flow for an engineering problem
- Simulations of fractional time-derivative against proportional time-delay for solving and investigating the generalized perturbed-KdV equation
- Pricing weather derivatives in an uncertain environment
- Variational principles for a double Rayleigh beam system undergoing vibrations and connected by a nonlinear Winkler–Pasternak elastic layer
- Novel soliton structures of truncated M-fractional (4+1)-dim Fokas wave model
- Safety decision analysis of collapse accident based on “accident tree–analytic hierarchy process”
- Derivation of septic B-spline function in n-dimensional to solve n-dimensional partial differential equations
- Development of a gray box system identification model to estimate the parameters affecting traffic accidents
- Homotopy analysis method for discrete quasi-reversibility mollification method of nonhomogeneous backward heat conduction problem
- New kink-periodic and convex–concave-periodic solutions to the modified regularized long wave equation by means of modified rational trigonometric–hyperbolic functions
- Explicit Chebyshev Petrov–Galerkin scheme for time-fractional fourth-order uniform Euler–Bernoulli pinned–pinned beam equation
- NASA DART mission: A preliminary mathematical dynamical model and its nonlinear circuit emulation
- Nonlinear dynamic responses of ballasted railway tracks using concrete sleepers incorporated with reinforced fibres and pre-treated crumb rubber
- Two-component excitation governance of giant wave clusters with the partially nonlocal nonlinearity
- Bifurcation analysis and control of the valve-controlled hydraulic cylinder system
- Engineering fault intelligent monitoring system based on Internet of Things and GIS
- Traveling wave solutions of the generalized scale-invariant analog of the KdV equation by tanh–coth method
- Electric vehicle wireless charging system for the foreign object detection with the inducted coil with magnetic field variation
- Dynamical structures of wave front to the fractional generalized equal width-Burgers model via two analytic schemes: Effects of parameters and fractionality
- Theoretical and numerical analysis of nonlinear Boussinesq equation under fractal fractional derivative
- Research on the artificial control method of the gas nuclei spectrum in the small-scale experimental pool under atmospheric pressure
- Mathematical analysis of the transmission dynamics of viral infection with effective control policies via fractional derivative
- On duality principles and related convex dual formulations suitable for local and global non-convex variational optimization
- Study on the breaking characteristics of glass-like brittle materials
- The construction and development of economic education model in universities based on the spatial Durbin model
- Homoclinic breather, periodic wave, lump solution, and M-shaped rational solutions for cold bosonic atoms in a zig-zag optical lattice
- Fractional insights into Zika virus transmission: Exploring preventive measures from a dynamical perspective
- Rapid Communication
- Influence of joint flexibility on buckling analysis of free–free beams
- Special Issue: Recent trends and emergence of technology in nonlinear engineering and its applications - Part II
- Research on optimization of crane fault predictive control system based on data mining
- Nonlinear computer image scene and target information extraction based on big data technology
- Nonlinear analysis and processing of software development data under Internet of things monitoring system
- Nonlinear remote monitoring system of manipulator based on network communication technology
- Nonlinear bridge deflection monitoring and prediction system based on network communication
- Cross-modal multi-label image classification modeling and recognition based on nonlinear
- Application of nonlinear clustering optimization algorithm in web data mining of cloud computing
- Optimization of information acquisition security of broadband carrier communication based on linear equation
- A review of tiger conservation studies using nonlinear trajectory: A telemetry data approach
- Multiwireless sensors for electrical measurement based on nonlinear improved data fusion algorithm
- Realization of optimization design of electromechanical integration PLC program system based on 3D model
- Research on nonlinear tracking and evaluation of sports 3D vision action
- Analysis of bridge vibration response for identification of bridge damage using BP neural network
- Numerical analysis of vibration response of elastic tube bundle of heat exchanger based on fluid structure coupling analysis
- Establishment of nonlinear network security situational awareness model based on random forest under the background of big data
- Research and implementation of non-linear management and monitoring system for classified information network
- Study of time-fractional delayed differential equations via new integral transform-based variation iteration technique
- Exhaustive study on post effect processing of 3D image based on nonlinear digital watermarking algorithm
- A versatile dynamic noise control framework based on computer simulation and modeling
- A novel hybrid ensemble convolutional neural network for face recognition by optimizing hyperparameters
- Numerical analysis of uneven settlement of highway subgrade based on nonlinear algorithm
- Experimental design and data analysis and optimization of mechanical condition diagnosis for transformer sets
- Special Issue: Reliable and Robust Fuzzy Logic Control System for Industry 4.0
- Framework for identifying network attacks through packet inspection using machine learning
- Convolutional neural network for UAV image processing and navigation in tree plantations based on deep learning
- Analysis of multimedia technology and mobile learning in English teaching in colleges and universities
- A deep learning-based mathematical modeling strategy for classifying musical genres in musical industry
- An effective framework to improve the managerial activities in global software development
- Simulation of three-dimensional temperature field in high-frequency welding based on nonlinear finite element method
- Multi-objective optimization model of transmission error of nonlinear dynamic load of double helical gears
- Fault diagnosis of electrical equipment based on virtual simulation technology
- Application of fractional-order nonlinear equations in coordinated control of multi-agent systems
- Research on railroad locomotive driving safety assistance technology based on electromechanical coupling analysis
- Risk assessment of computer network information using a proposed approach: Fuzzy hierarchical reasoning model based on scientific inversion parallel programming
- Special Issue: Dynamic Engineering and Control Methods for the Nonlinear Systems - Part I
- The application of iterative hard threshold algorithm based on nonlinear optimal compression sensing and electronic information technology in the field of automatic control
- Equilibrium stability of dynamic duopoly Cournot game under heterogeneous strategies, asymmetric information, and one-way R&D spillovers
- Mathematical prediction model construction of network packet loss rate and nonlinear mapping user experience under the Internet of Things
- Target recognition and detection system based on sensor and nonlinear machine vision fusion
- Risk analysis of bridge ship collision based on AIS data model and nonlinear finite element
- Video face target detection and tracking algorithm based on nonlinear sequence Monte Carlo filtering technique
- Adaptive fuzzy extended state observer for a class of nonlinear systems with output constraint