Nonlinear adaptive sliding mode control with application to quadcopters
-
Ryan Mathewson


Abstract
Nonlinear adaptive sliding mode control (NASMC) has the capability to adequately control a system whose parameters are unknown to the controller designer. Conventional model-based controllers require a mathematical dynamic model of the system with known parameters. These system parameters are normally determined by extensive system identification experiments, which are expensive and time-consuming to perform. A NASMC approach that does not require known system parameters is proposed. Using NASMC, a controller designer can skip the expensive and time-consuming system parameter identification and fast-forward to the control implementation. In addition, once a controller is derived for a quadcopter using NASMC, the same controller will work on any quadcopter with the same equations of motion but different dynamic parameters. The formulation of the NASMC is presented for general second-order and fourth-order systems. Then, as an implementation example, the application of the general NASMC approach is demonstrated by applying it to a quadcopter unmanned aerial vehicle in simulation.
1 Introduction
Adaptive control has been successfully developed for certain types of nonlinear control problems. The proposed nonlinear adaptive sliding mode controller (NASMC) is shown to be very powerful when the nonlinear plant dynamics can be linearly parameterized and the state is measurable. This thesis attempts to show the advantages and power of the proposed reformulated NASMC approach through a demonstration of the NASMC application to a quadcopter system.
1.1 Brief literature survey
Quadcopters have an extremely broad range of uses, whether they be for commercial, government, or educational purposes. Many researchers have been working to provide more stable operations for a larger range of circumstances using improved modeling, estimation of states, and control techniques [1–3]. Nonlinear controllers are much more desirable for their ability to expand the range of operation and the robustness of the controller. Most of the algorithms that use these approaches suffer from disadvantages that the NASMC can account for. These include things like a lack of robustness to external disturbances and reliance on simplified quadcopter dynamics.
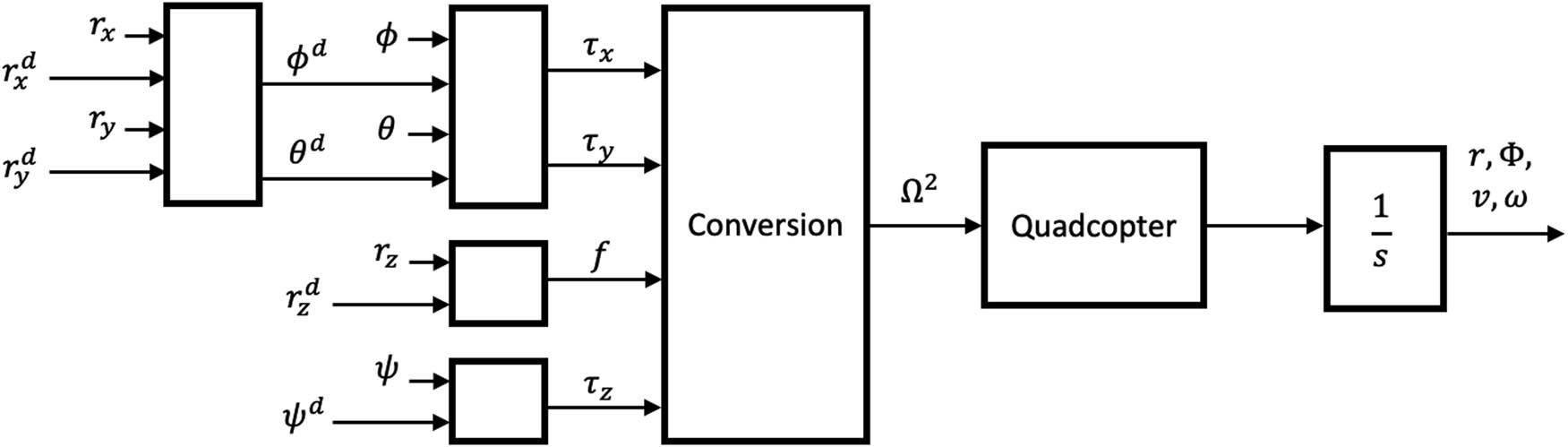
Basic cascade structure block diagram for quadcopter.
Many researchers that have worked on this problem in the past have taken advantage of the cascade structure of quadcopter dynamics and developed nonlinear controllers based on it (Figure 1). The big disadvantage of the cascade structure is that it only shows that the position tracking errors are bounded but not asymptotically stabilized. This is due to the indirect control of the control moments
There are various different design techniques for quadcopter control that use the cascade structure, including methods like feedback linearization and backstepping [4–8], Lyapunov functions [9,10], sliding mode control [11–14], robust adaptive and geometric tracking control [15–19], and other methods completely [20]. Many of these works are based on simplifying assumptions or creating other restrictions on the system. As an example, previous studies [4,9,11,12,21] all choose in their approach to neglect the difference between orientation angle rates and angular velocities/accelerations.
In some research, the approach has concentrated on attitude stabilization without robust trajectory tracking stabilization like in previous studies [18,22–24]. The biggest problem with attitude stabilization is that to achieve zero tracking error, one must perfectly know the relationship between attitude angles and translational motion. These relationships have thus been presented without any disturbances or uncertainties as in the studies of Yu et al. [8] and Zhao et al. [19], which include uncertainties and disturbances in angular motion but ignore them in translational motion. In addition, the studies of Choi and Ahn [7] and Yu and Ding [24] both suggest an adaptive control to estimate the uncertainties and disturbances in translational motion, but do not go into further discussion on the topic. A second-order sliding mode controller was suggested in the study of Zheng et al. [21]; however, the authors chose not to include uncertainties in the model, and the sliding surfaces that are suggested are not necessarily asymptotically stable. Another method, as in the study of Lee et al. [17], includes unknown disturbances in the model, but it uses the cascade control structure, demonstrating that the position-tracking errors are bounded but not asymptotically stabilized. Every article in the aforementioned reference sets uses
An improved technique, as discussed extensively in the study of Poultney et al. [25], is the introduction of a pair of two second-order and two fourth-order subsystems that work in tandem to control a quadcopter. This technique is not utilized in any other reference within this document. The fourth-order subsystems are used to directly control
1.2 Motivation and contributions
The NASMC techniques presented here are derived from Slotine and Li’s [26] work, which discusses adaptive control of nonlinear systems. The formulations and methods presented were combined with that in the study of Slotine and Coetsee [27], which is also co-written by Slotine, and re-derived to include a detailed stability proof that was missing from the study of Slotine and Li [26] and was used to expand the NASMC approach used here.
There are many benefits to the NASMC approach that are not found in other methods. First, the advantage stated above, NASMC is able to achieve asymptotically stable
One of the strongest aspects of the NASMC approach is that it does not require knowledge of system parameters to work. This means that, in general, a NASMC approach is strongly desirable to increase the range of operations. By not requiring the knowledge of system parameters, it eliminates the need to perform system identification experiments, which would normally be used to find such parameters. The controller is designed as if the unknown parameters were actually known exactly, but since this is not initially the case, the system wanders outside the boundary layer to eventually improve the parameter estimates. Once inside the boundary layer, the system understands that no further advantage is gained by continuing adaptation. Even if the parameters are still not known exactly, they can successfully eliminate the combined error.
The NASMC approach also adapts to gradual changes in system parameters. These changes can happen due to a number of factors, which include the aging of the system, changes in the environment, and more depending on the application. This can also reduce the number of sensors required in a system, which may no longer be required to measure these parameters. In addition, the NASMC approach is scalable, requiring no changes when implemented to other systems of similar type that use the same equations of motion but have different unknown parameters (e.g., the NASMC used on a small quadcopter could also be used on a large quadcopter with the same layout).
Some disadvantages of the NASMC approach exist. Slower tracking of the
To demonstrate the power of the proposed NASMC approach and its implementation, we apply it to a quadcopter in simulation as an example. The quadcopter is seen as a strong candidate for utilizing all the advantages of the approach due to its use in many different environments, its high potential for unknown disturbances, and because developing its dynamic system parameters is a difficult and costly endeavor. A quadcopter also has many real-world applications ranging from simple toys to large-scale government operations that can take advantage of the ability to scale.
This NASMC approach provides significant advantages over other methods in terms of tracking performance and unknown parameter estimation. The ability to scale and avoid system identification experiments also provide time and cost saving advantages in real-world applications. Finally, the performance of this controller shows strong potential for further research and experimentation on any number of systems.
1.3 Summary of the key contributions
The key contributions of the article are as follows:
An alternative, detailed stability analysis is presented for NASMC that is missing in the literature.
The alternative, detailed stability analysis defines a residual error whose decay to zero is proven (and demonstrated in examples), whereas the stability analysis in the literature only proves bounded errors for parameter estimation errors.
An adaptive single-loop control method is derived for a quadcopter, whereas only nonadaptive multi-loop controllers or some nonadaptive single-loop controllers are found in the literature.
The adaptive nature of the proposed controller eliminates any need for extensive and time-consuming system identifications tests.
The single-loop nature of the proposed controller simplifies the architecture of the controller implementation compared to that of multi-loop controllers.
Fourth-order subsystems are used to control the
2 Assumptions made
There are a few assumptions that are made in this article about how the quadcopter is controlled. It is assumed that the quadcopter’s geometry has two planes of symmetry. As a consequence, we are choosing to neglect the off-diagonal elements of the mass moment of inertia matrix
3 Methods
The chosen method of control for the quadcopter is a NASMC, which offers robustness in relation to parametric uncertainty. The controllers will control the system with unknown constants or very slowly varying parameters. This is because parameters are hard to determine through experimentation and could vary due to use conditions and age of the vehicle. For the simulation presented, both second- and fourth-order controllers are used.
3.1 Adaptive sliding mode controller used
For the general nth-order controller, consider the following dynamic system:
where
where
Let us define a combined error:
where
where the reference value
where
which measures the algebraic distance of the current state to the boundary layer, where
The boundary layer is a region around
3.1.1 Derivation of control law for known system parameters
First, a nonadaptive sliding mode control (SMC) is considered. For the nonadaptive SMC, we assume that the system parameters,
where
where
First, we prove that, if the system parameters
Note that, since
3.1.2 Derivation of control law for unknown system parameters
Second, a NASMC is considered. For the NASMC approach, the system parameters are unknown, and we set our control law to include the estimated values of
By substituting Eq. (11) into Eq. (1), assuming there is no disturbance, and simplifying the result,
where
Note that, in Eqs. (12) and (13),
3.1.3 Derivation of adaptation laws and stability analysis
To derive a control law that ensures convergence to the boundary layer, a Lyapunov function candidate
where
where
To properly find the time derivative of Eq. (14), the time derivative of
We then substitute Eqs. (1), (15), and (16) into Eq. (17) and simplify the result to obtain
When noting that
which we then substitute Eq. (18) and simplify to obtain
The adaptation laws are selected as follows:
and for
This leads to the result
so that outside the boundary layer,
This controller will later be applied to a part of the quadcopter vehicle control system in both second- and fourth-order forms.
3.2 Quadcopter dynamics and model
This section will discuss the dynamics and equations required to create the quadcopter model in simulation. First, we must create the quadcopter model from the kinematic and dynamic relationships of the vehicle. Then, we will use the second- and fourth-order controllers as subsystems in the larger quadcopter model and present the control structure.
For the quadcopter, we consider a rigid body model in three-dimensional (3D) space with six degrees-of-freedom (DOF). We define an earth-fixed frame
where
where
and since the
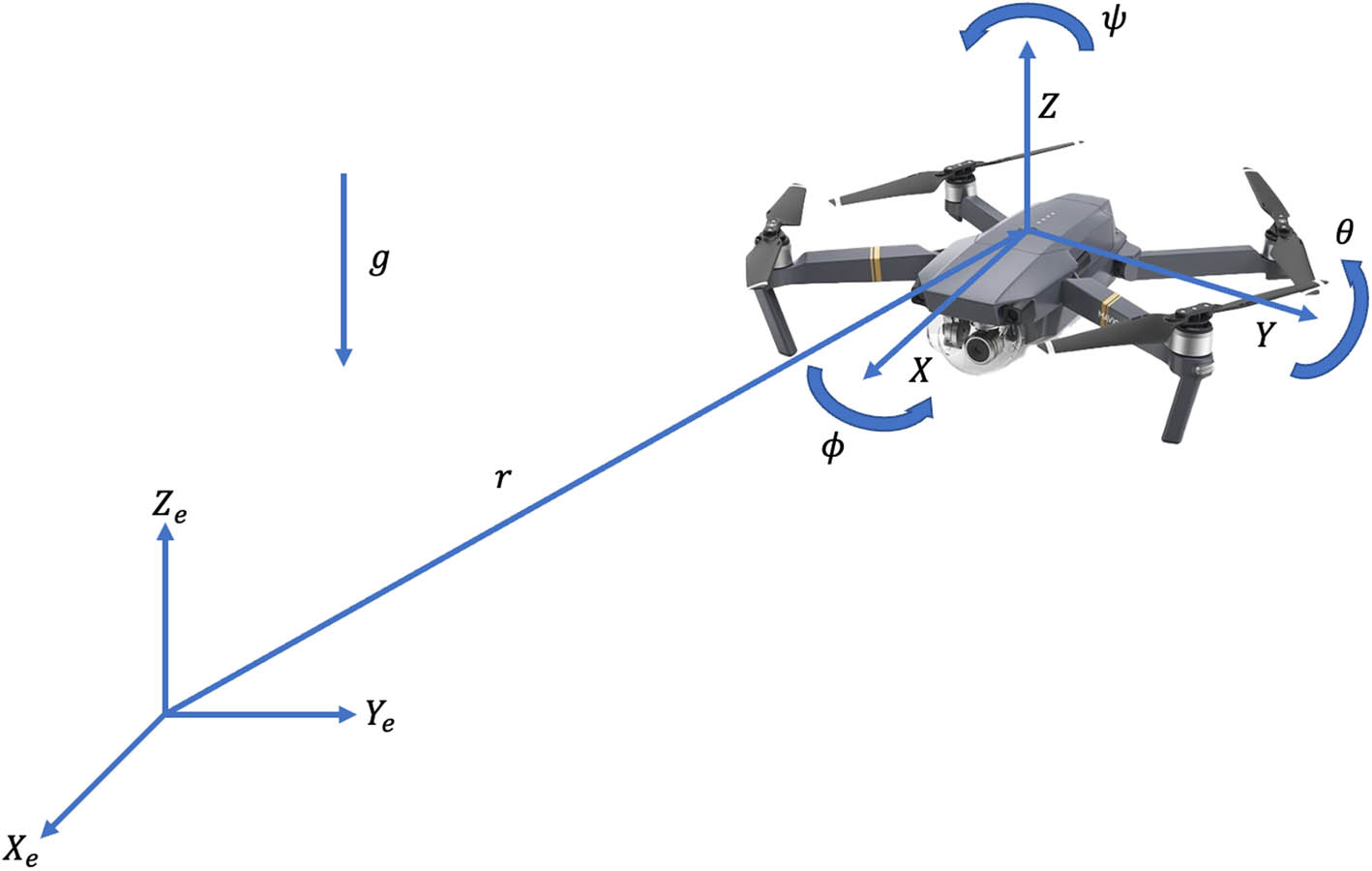
Quadcopter reference frames.
The equations of motion for the quadcopter modeled as a rigid body are as follows:
where
The 12 states of the system are the rigid body CM position relative to the earth-fixed frame (
To find the total thrust control force,
where
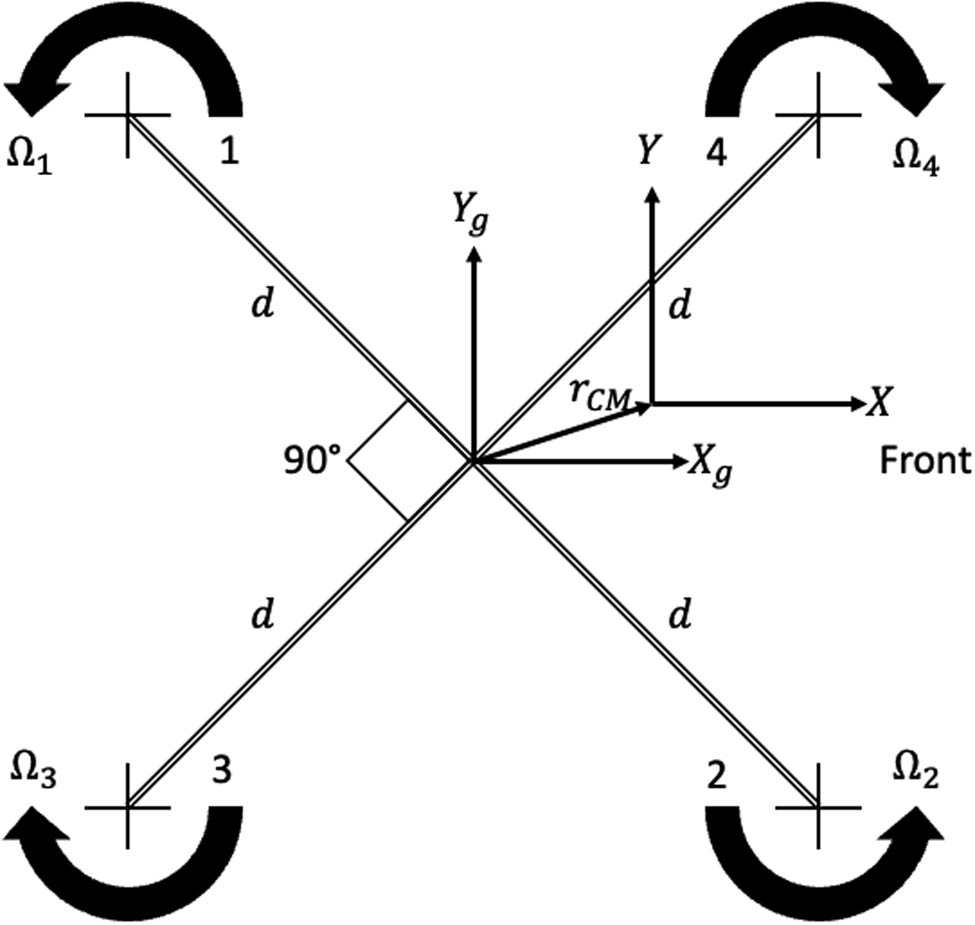
Quadcopter top view.
3.3 NASMC design
To create the NASMC system for our quadcopter example, we require derivations of the second- and fourth-order control subsystem equations.
3.3.1 Derivation of second-order and fourth-order control subsystems
To reach the roll and pitch moments
where the thrust force used is the nominal value
where
For this control method, we must define some “
These equations will help us relate the thrust control force and the control moments to the position and yaw angle.
Next, we rewrite the equations of motion in Eq. (29) without the unknown terms and in detailed form:
with
To put Eq. (34) into a form that will work for our simulation example, we must utilize the property of Eq. (26) to solve for
where we must make the assumption that
where the substitution of the first equation in Eq. (35) has been made. Finally, we must acquire the yaw angle in a way that can be used for its subsystem. We start by taking time derivative of Eq. (27) and solving for
where
where again
where
Note that the roll and pitch Euler angles
3.3.2 Conversion of the second-order and fourth-order subsystems to the standard form
For all four of our control subsystem equations, we must select our
We will be using this methodology to put each of the four subsystems into the standard form. The fourth- and second-order standard forms are derived from Eq. (1) using
Each set of these is shown below for all four control subsystem equations. This method for separation of the control subsystem equations is how we can utilize the equations for our quadcopter simulation example.
Starting with Eq. (38), our first control subsystem equation, we will compare this to the first standard form in Eq. (44) to define three pairs of
Note that
Now we have completed putting
Next, we start with Eq. (39), our second control subsystem equation. We will compare this to the second standard form in Eq. (44) to define three pairs of
Note that, again,
Now we have completed putting
Next, we will start with Eq. (40), our third control subsystem equation. We will compare this to the third standard form in Eq. (44) to define one pair of
Note that
Now we have completed putting
Finally, we will start with Eq. (43), our fourth and final control subsystem equation. We will compare this to the last standard form in Eq. (44) to define two pairs of
Since we define new control inputs,
Now we have completed putting
3.3.3 Control and adaptation laws for the second-order and fourth-order subsystems
For use as the control laws, the standard form equations presented above are solved for their control input. The
Using Eq. (15) with
where
where
and for
Comparably, using Eq. (15) with
where
where
and for
Now that the control and adaptation laws are completely defined for all four subsystems, they can be used in the quadcopter simulation.
3.3.4 Calculation of the actual control inputs – the rotor speeds
With the outputs of the control subsystems in the simulation being the
Because of the relationships defined in Eq. (31), we may solve for the
We can then use Eq. (60) to solve for the
3.4 Summary of the controller implementation
The control structure used in the simulation is presented in block diagram form in Figure 4. The computations needed to implement the controller are not complex. First, the desired motion is defined by the user as
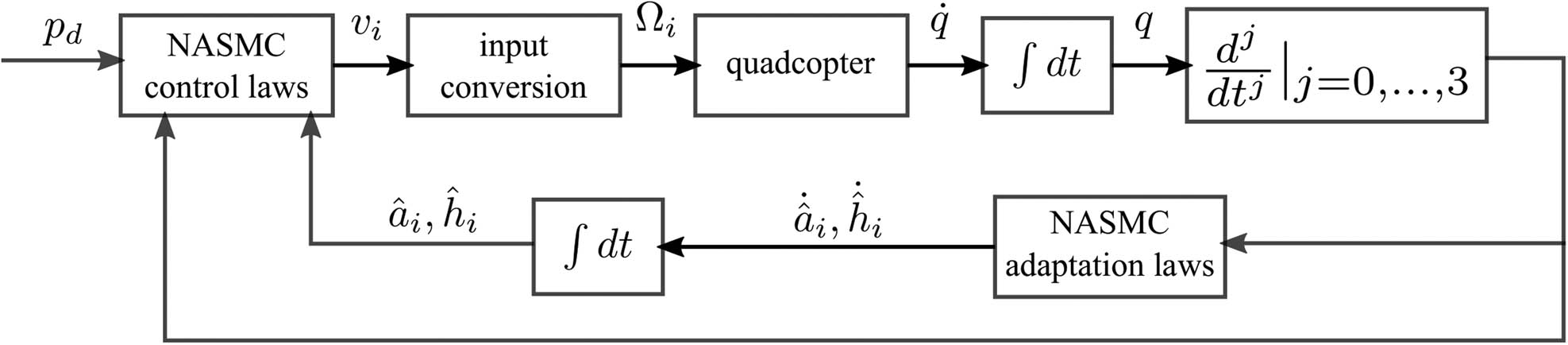
Control structure block diagram of quadcopter system.
At the same time, the state feedback
3.5 Computational complexity of the controller
As discussed in the previous section, the structure of the controller consists of four main blocks. The calculations involved in the NASMC approach are limited to the evaluation of four equations for the “NASMC control laws” block (Eqs. (45), (46), (48), and (50)), the evaluation of five equations in the “input conversion” block (Eqs. (59) and (60)), and the evaluation of 12 total equations in the “NASMC adaptation laws” block (Eqs. (53), (54), (57), and (58)). An additional computation overhead is needed to calculate the derivatives of the quadcopter states by the block marked
Next, these control subsystem equations are used in the quadcopter simulations as an example of the NASMC system. The simulation and results are presented in the next section.
4 Simulation
For the simulation that is shown as an example, a quadcopter is presented in a Simulink model. The quadcopter makes a great candidate use case for the NASMC approach, since it can take advantage of all the advantages that NASMC provides. Quadcopter users require the ability to use in many different environments, which have a high potential for unknown disturbances, because developing the dynamic system parameters is a difficult and costly endeavor. Furthermore, quadcopters also have a wide range of applications, from small camera drones all the way to large military operations vehicles. Groups that work with quadcopters are likely to use more than one system. Utilizing the NASMC scalability property requires no changes when implemented to other systems of similar type that use the same equations of motion but have different unknown parameters. All of these things are able to gain advantages from the use of the NASMC system, making the quadcopter a prime example for simulation and the use of this controller approach.
For our simulation to perform as we want it to, we must provide some assumptions and definitions that the controller can simulate. These are the desired motion functions, the gains used in the controllers, and the nominal values of the dynamic model parameters. These will be explained further.
4.1 The rationale for choosing the controller
There are two very important reasons for choosing a NASMC controller for any application. First, NASMC does not need prior knowledge of the dynamic system parameters. These dynamics system parameters are determined by extensive and time-consuming system identification experiment. Since NASMC does not require prior knowledge of the system parameters, its usage eliminates the extensive system identification experiments. Second, if the dynamic system parameters are changed due to the age of the system, NASMC approach adapts to the changed system parameters and maintains its performance even when the system ages.
4.2 Desired motion functions
The desired motion in our simulation would equate to the input of an operator who is piloting the quadcopter vehicle; however, we use a set of desired values in place of these operator inputs. The motion we choose to define is set by the following equations for the states:
where the time derivatives are taken of these equations until the fourth derivatives for
4.3 Controller gains
For the
Controller gains for all four control subsystems for NASMC
|
|
|
|
|
|
|---|---|---|---|---|
|
|
0 | 0 | 0 | 0 |
|
|
2 | 2 | 20 | 2 |
|
|
0.05 | 0.05 | 0.05 | 0.05 |
|
|
2 | 2 | 3 | 1 |
|
|
21 | 21 | 100 | 100 |
|
|
100 | 100 | 100 | 100 |
|
|
100 | 100 | — | 100 |
|
|
100 | 100 | — | — |
The choice of gains was determined by experimentation. These gains are used in each control subsystem to fine-tune the abilities of the controllers. Note that all
4.4 Nominal values of dynamic model parameters
Contained within the dynamic model are many parameters, of which many are unknown to the controllers in the subsystems. These parameters are being adapted to by the subsystems and are used to give the dynamic model a nominal value, while the controllers output estimated values of
Known nominal values of dynamic model parameters
|
|
0.226 m |
|
|
0.226 m |
|
|
0.226 m |
|
|
0.226 m |
Unknown nominal values of dynamic model parameters
|
|
|
|
|
|
|
|
1.138 kg |
|
|
0.0077
|
|
|
0.0075
|
|
|
0.0127
|
|
|
0.0076
|
4.5 A benchmark controller for performance comparison
The non-adaptive counterpart of NASMC, which is simply named the Sliding Model Control (SMC), is commonly used for the control of nonlinear systems. The SMC method is very robust for systems with known parameters that have some bounded estimation errors. However, the SMC method cannot robustly control systems with completely unknown parameters. The proposed NASMC method in this article, can robustly control systems with unknown parameters.
To demonstrate the superiority of the NASMC approach to the plain SMC approach, both controllers are used on the same quadcopter in this section. However, at time 150 s of the simulation, the thrust coefficients
Controller gains for all four control subsystems for SMC
|
|
|
|
|
|
|---|---|---|---|---|
|
|
0 | 0 | 0 | 0 |
|
|
2 | 2 | 20 | 2 |
|
|
0.05 | 0.05 | 0.05 | 0.05 |
|
|
2 | 2 | 3 | 1 |
5 Results
This section includes the simulation results of the quadcopter model built in Simulink when provided the desired values, controller gains, and dynamic model parameters provided above. The simulation is run for 300 s to have a long time period to see the quadcopter tracking properly and for the parameters to have plenty of time to converge to their estimations. To demonstrate how the SMC and NASMC react to unknown parameter changes, at time 150 s of the simulation the thrust coefficients
In Figure 5, we can see the actual 3D position path of the quadcopter compared to its desired position path. Figure 6 shows the tracking data of four states,
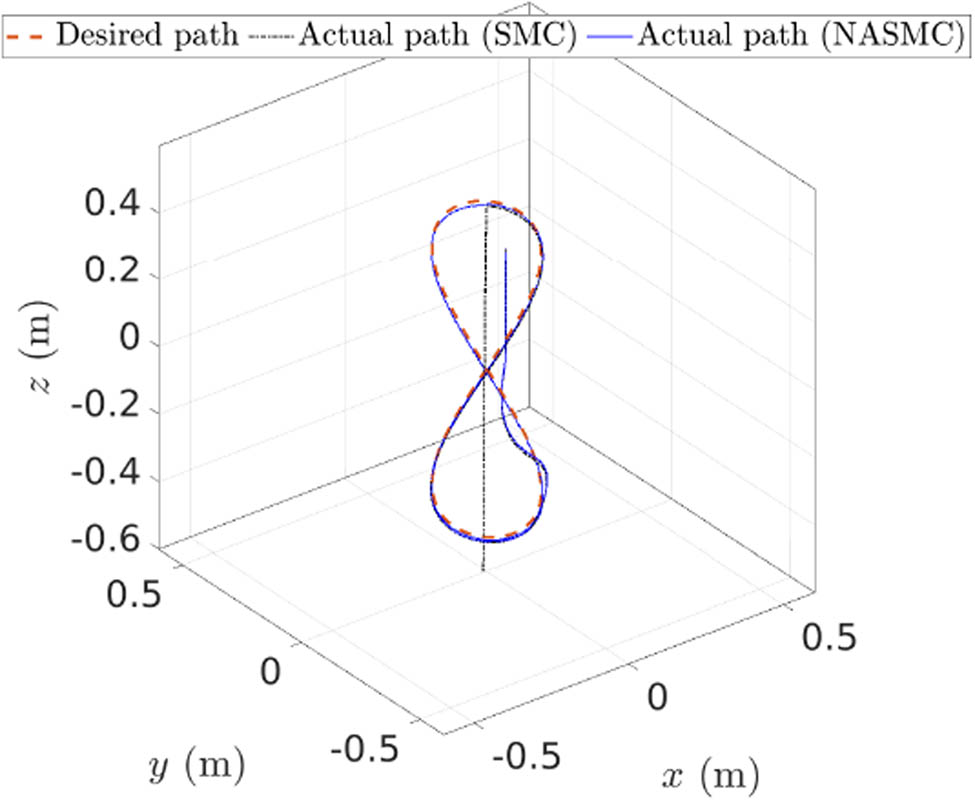
3D position of the quadcopter system using SMC and NASMC.
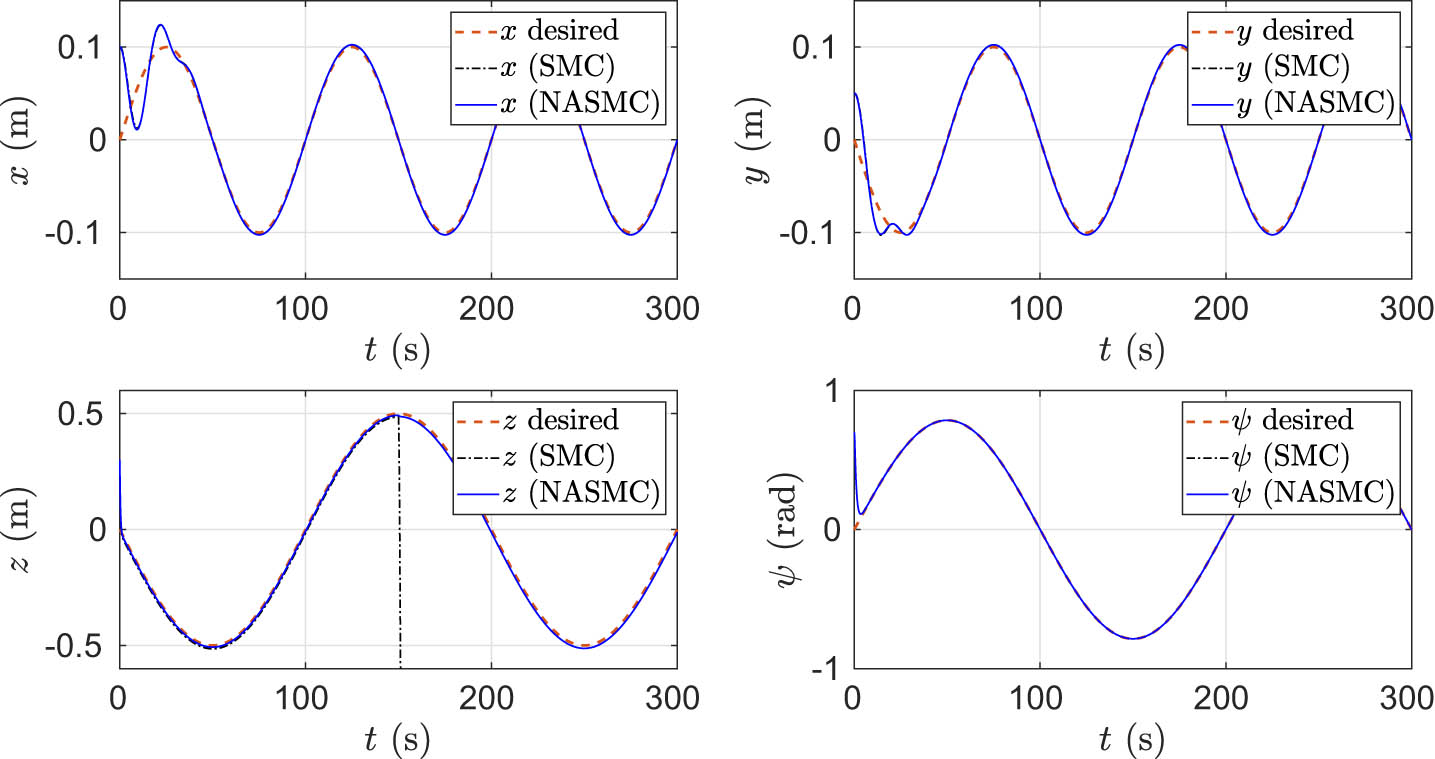
States tracking of the quadcopter system using SMC and NASMC.
Figure 7 shows the roll and pitch angle of the quadcopter. This provides further data on the orientation of the vehicle during simulation. A stable system would show small roll and pitch angles once settled.
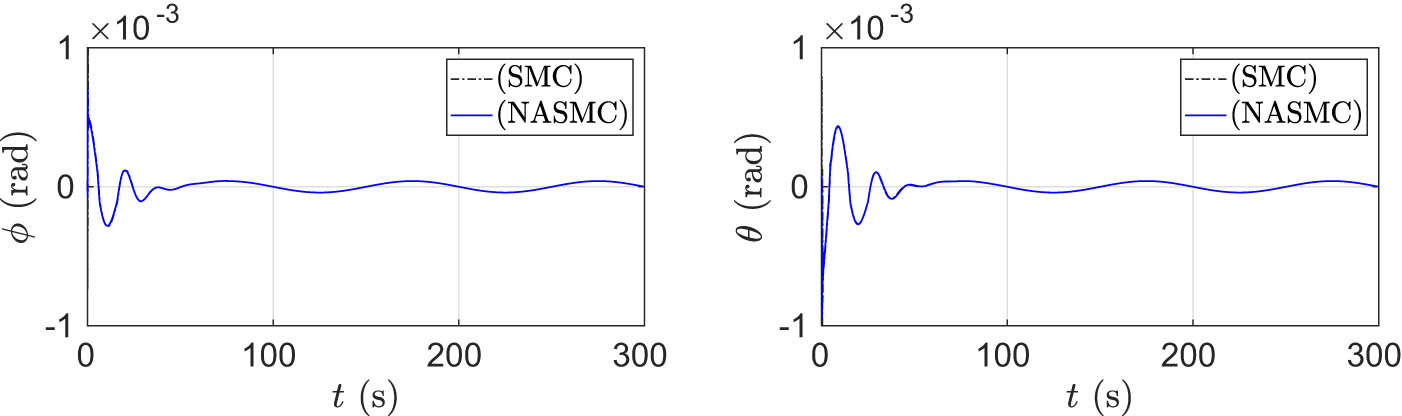
Roll and pitch angles of the quadcopter system using SMC and NASMC.
Figure 8 shows the individual rotor angular speeds during the simulation. This shows the data of the rotor speeds as they change while following the desired path. A stable system would show smooth changes in the angular speeds, since the desired path is smooth and slow.
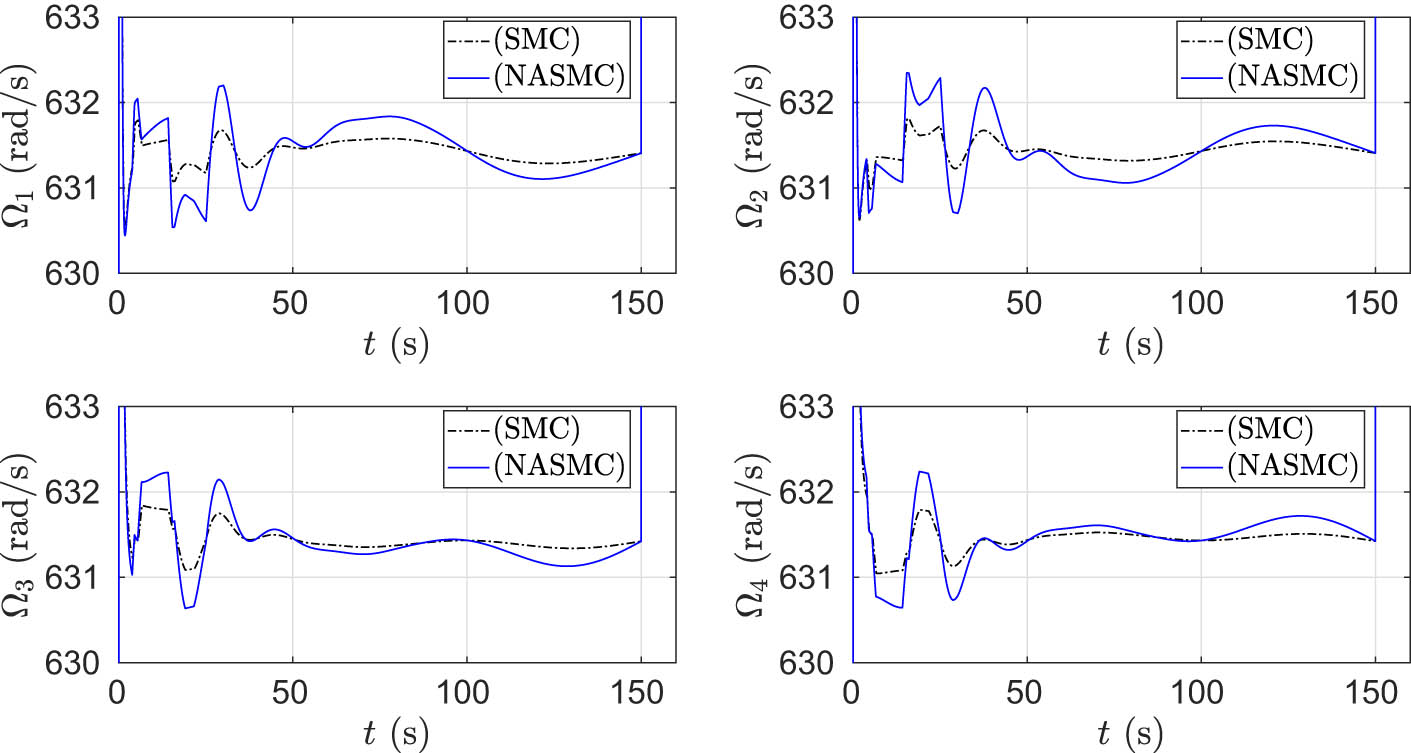
Rotor angular speeds of the quadcopter system using SMC and NASMC (the first 150 s of simulation).
In Figure 9, we can see the residual error of the
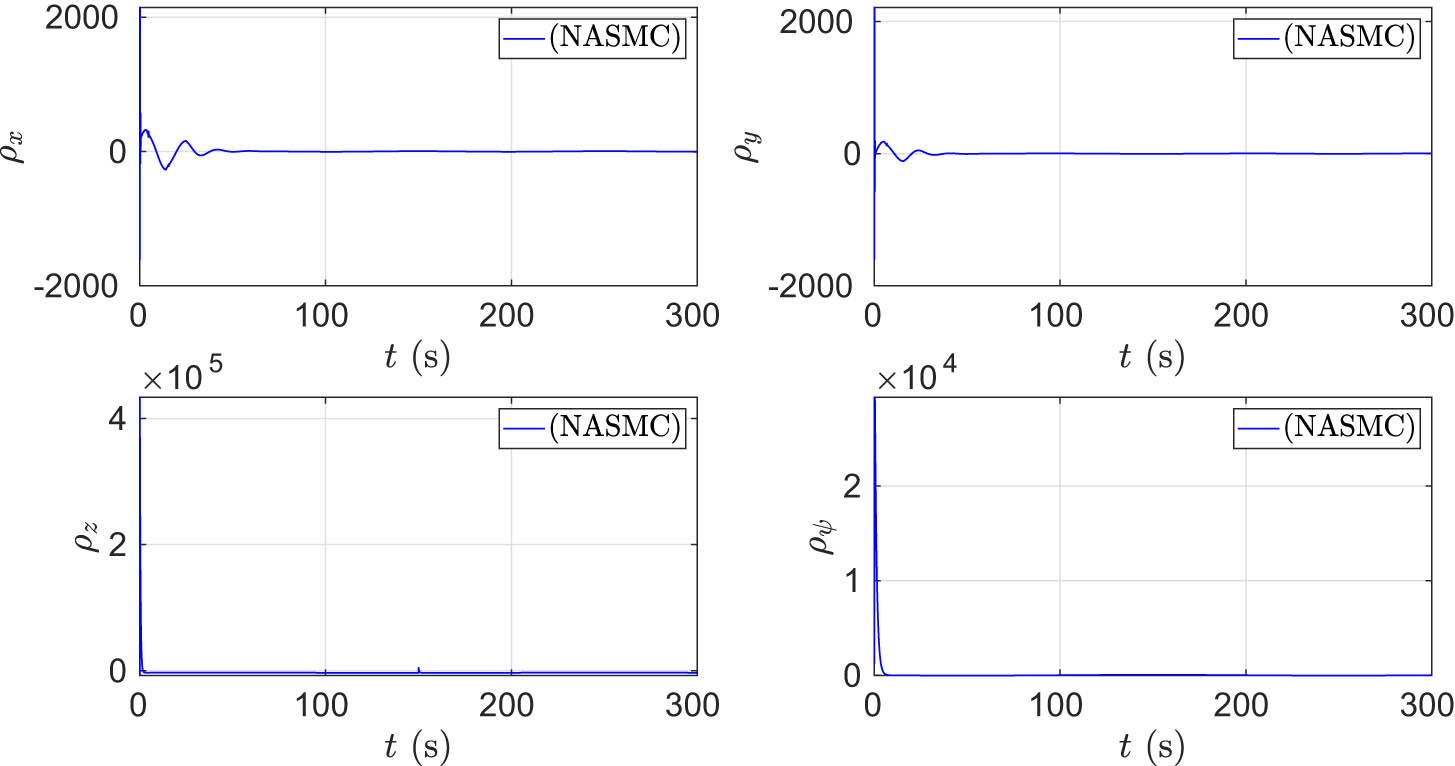
Residual errors of quadcopter simulation using NASMC.
6 Discussion
By observing the results presented in Figures 5 and 6, one can see from the first glance that the tracking of the position path and the states very closely matches the desired values given after some time to stabilize the system to control for the unknown parameters. This shows that the NASMC is keeping the quadcopter controlled in a stable manner to match the desired results and that the actual position of the quadcopter vehicle never has a large deviation from the desired functions, even at time 150 s, when the rotors’ thrust coefficients are abruptly reduced to 60% of their original values. However, it can be seen that the
Figure 7 continues to show the story of the stability of the NASMC. Even during the first section of the simulation when the control subsystems are still working to become stable, neither the roll nor pitch angle ever exceeds
Figures 8 and 10 show the angular speed of individual rotors for the first 150 s and for the last 150 s of the simulation, respectively. Referring to Figure 8, we see the angular speeds of each individual rotor on the vehicle as they change with time. The SMC and NASMC methods apply slightly different rotor speeds. Aside from some initial spikes at the start of the simulation, the vehicle quickly settles into a stable pattern of rotor speeds. As shown by the
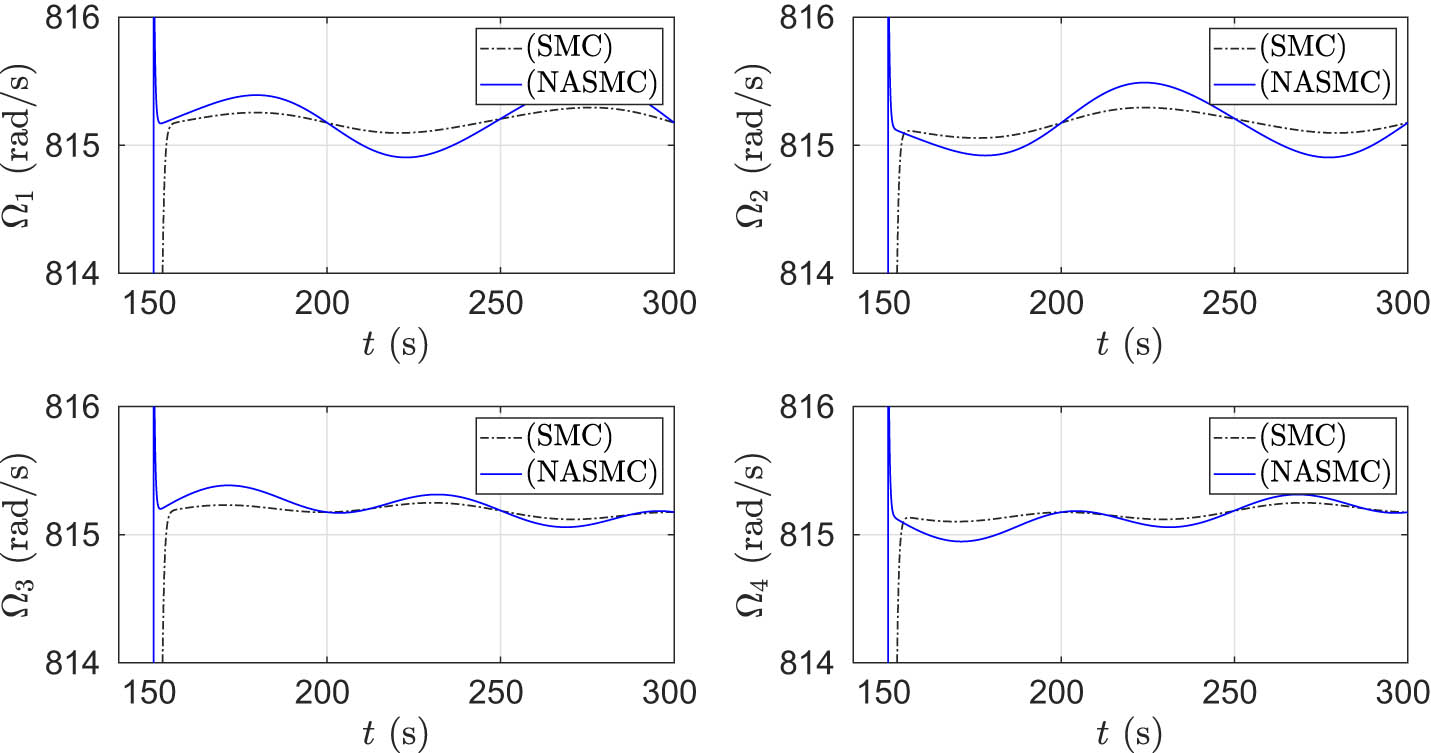
Rotor angular speeds of the quadcopter system using SMC and NASMC (the second 150 s of simulations).
Referring to Figure 10, it can be seen that the NASMC adjusts the rotor speeds to the drop in rotors’ thrust coefficients to 60% of their original values at 150 s much faster than the SMC does. This fast adjustment is the key to the success of the NASMC to control the quadcopter despite the large parameter changes. By the time the SMC applies adjustments to rotor speeds, it has already lost control of the quadrotor in the
In Figure 9, we can see the tracking error dynamics for
Nominal unknown control parameters
|
|
|
|
|
|---|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
— | — |
|
|
|
— | — |
7 Conclusion
The research in this article has demonstrated only a first glance at the potential capability of the NASMC approach. The quadcopter example shows its ability to adequately control the system when the parameters are unknown to the controller designer, removing the need for system identification experiments. All four states tracked closely with their corresponding desired values, roll and pitch angles along with all four rotor angular speeds all settled into a steady pattern, and all parameters quickly reached a steady state value that led to exponential convergence of
The successful simulation of NASMC with the quadcopter shows its strong potential for continued future development, research, and experimentation to build upon the research presented in this article. As long as researchers or control engineers can write the governing differential equations of their dynamic system in the form of Eq. (1), they can use the proposed controller. Examples of systems whose governing differential equations can be written in the form of Eq. (1) are robotic arms, spacecraft, airplanes, etc. Exploring the application of NASMC on robotic arms, spacecraft, airplanes, etc. can be considered as further development opportunity.
-
Funding information: This research was not funded by any funding agency.
-
Author contributions: The research idea and the overall methodology were formulated by F.F. The detailed derivations of the approach and the creation of the computer simulation code were performed by R.M., with suggested corrections in the derivations and some code debugging and additions by F.F. The draft manuscript was authored by R.M., which went through several revisions according to feedback from F.F. All authors have accepted responsibility for the entire content of this manuscript and approved its submission. The first author was a graduate student who conducted this research as required by his Master’s of Science thesis. The second author was the first author s thesis research advisor.
-
Conflict of interest: The authors state that there is no conflict of interest.
References
[1] Bangura M, Mahony RE. Nonlinear dynamic modeling for high performance control of a quadrotor. Australasian Conference on Robotics and Automation; 2012 Dec 3–5; Wellington, New Zealand. Curran Associates, Inc., 2014. p. 115–25. Search in Google Scholar
[2] Mahony RE, Kumar VR, Corke P. Multirotor aerial vehicles: modeling, estimation, and control of quadrotor. IEEE Robotic Autom Magazine. 2012;19(3):20–32. 10.1109/MRA.2012.2206474Search in Google Scholar
[3] Hua MD, Hamel T, Morin P, Samson C. Introduction to feedback control of underactuated VTOLvehicles: A review of basic control design ideas and principles. IEEE Control Syst Magazine. 2013;33(1):61–75. 10.1109/MCS.2012.2225931Search in Google Scholar
[4] Bouabdallah S, Siegwart RY. Full control of a quadrotor. 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems; 2007 29 Oct–2 Nov; San Diego (CA), USA. IEEE, 2007. p. 153–8. 10.1109/IROS.2007.4399042Search in Google Scholar
[5] Mian AA, Daobo W. Nonlinear Flight control strategy for an underactuated quadrotor aerial robot. 2008 IEEE International Conference on Networking, Sensing and Control; 2008 Apr 6–8; Sanya, China. IEEE, 2008. p. 938–42. 10.1109/ICNSC.2008.4525351Search in Google Scholar
[6] Abdessameud A, Tayebi A. Global trajectory tracking control of VTOL-UAVs without linear velocity measurements. Automatica. 2010;46(6):1053–9. 10.1016/j.automatica.2010.03.010Search in Google Scholar
[7] Choi YC, Ahn H. Nonlinear control of quadrotor for point tracking: actual implementation and experimental tests. IEEE/ASME Trans Mechatr. 2015;20(3):1179–92. 10.1109/TMECH.2014.2329945Search in Google Scholar
[8] Yu Y, Guo Y, Pan X, Sun C. Robust backstepping tracking control of uncertain MIMO nonlinear systems with application to quadrotor UAVs. 2015 IEEE International Conference on Information and Automation; 2015 Aug 8–10; Lijiang, China. IEEE, 2015. p. 2868–73. 10.1109/ICInfA.2015.7279776Search in Google Scholar
[9] Hua MD, Hamel T, Morin P, Samson C. A control approach for thrust-propelled underactuated vehicles and its application to VTOL drones. IEEE Trans Automatic Control. 2009;54(8):1837–53. 10.1109/TAC.2009.2024569Search in Google Scholar
[10] Yesildirek A, Imran B. Nonlinear control of quadrotor using multi Lyapunov functions. 2014 American Control Conference; 2014 Jun 4–6; Portland (OR), USA. IEEE, 2014. p. 3844–9. Search in Google Scholar
[11] Adigbli P, Grand C, Mouret JB, Doncieux S. Nonlinear attitude and position control of a micro quadrotor using sliding mode and backstepping techniques. 3rd US-European Competition and Workshop on Micro Air Vehicle Systems (MAV07) & European Micro Air Vehicle Conference and Flight Competition (EMAV2007); 2007 Sep 18–22; Toulouse, France. IMAV, 2007. p. 17–21. Search in Google Scholar
[12] Xu R, Özgüner Ü. Sliding mode control of a class of underactuated systems. Automatica. 2008;44(1):233–41. 10.1016/j.automatica.2007.05.014Search in Google Scholar
[13] Runcharoon K, Srichatrapimuk V. Sliding mode control of quadrotor. 2013 The International Conference on Technological Advances in Electrical, Electronics and Computer Engineering (TAEECE); 2013 May 9–11; Konya, Turkey. IEEE, 2013. p. 552–7. 10.1109/TAEECE.2013.6557334Search in Google Scholar
[14] Chengshun Y, Yang Z, Huang X, Li S, Zhang Q. Modeling and robust trajectory tracking control for a novel six-rotor unmanned aerial vehicle. Math Problems Eng. 2013;2013(1):1–13. Search in Google Scholar
[15] Lee T, Leok M, Mcclamroch NH. Geometric tracking control of a quadrotor UAV on SE(3). IEEE Conference on Decision and Control; 2010 Dec 15–17; Atlanta (GA), USA. IEEE, 2011. p. 5420–5. 10.1109/CDC.2010.5717652Search in Google Scholar
[16] Roberts A, Tayebi A. Adaptive position tracking of VTOL UAVs. IEEE Trans Robotics. 2010;27(1):129–42. 10.1109/CDC.2009.5400947Search in Google Scholar
[17] Lee T, Leok M, McClamroch NH. Nonlinear robust tracking control of a quadrotor UAV on SE(3). Asian J Control. 2013;15(2):391–408. 10.1002/asjc.567Search in Google Scholar
[18] Lee T. Robust adaptive attitude tracking on SO(3) with an application to a quadrotor UAV. IEEE Trans Control Syst Tech. 2013;21(5):1924–30. 10.1109/TCST.2012.2209887Search in Google Scholar
[19] Zhao B, Xian B, Zhang Y, Zhang X. Nonlinear robust adaptive tracking control of a quadrotor UAV via immersion and invariance methodology. IEEE Trans Industr Electr. 2015;62(5):2891–902. 10.1109/TIE.2014.2364982Search in Google Scholar
[20] Kayacan E, Maslim R. Type-2 fuzzy logic trajectory tracking control of quadrotor VTOL aircraft with elliptic membership functions. IEEE/ASME Trans Mechatr. 2017;22(1):339–48. 10.1109/TMECH.2016.2614672Search in Google Scholar
[21] Zheng EH, Xiong JJ, Luo JL. Second order sliding mode control for a quadrotor UAV. ISA Trans. 2014;53(4):1350–6. 10.1016/j.isatra.2014.03.010Search in Google Scholar PubMed
[22] Tayebi A, McGilvray S. Attitude stabilization of a VTOL quadrotor aircraft. IEEE Trans Control Syst Technol. 2006;14(3):562–71. 10.1109/TCST.2006.872519Search in Google Scholar
[23] Mellinger D, Michael N, Kumar V. Trajectory generation and control for precise aggressive maneuvers with quadrotors. Int J Robotic Res. 2012;31(5):664–74. 10.1007/978-3-642-28572-1_25Search in Google Scholar
[24] Yu Y, Ding X. A Global tracking controller for underactuated aerial vehicles: design, analysis, and experimental tests on quadrotor. IEEE/ASME Trans Mechatr. 2016;21(5):2499–511. 10.1109/TMECH.2016.2558678Search in Google Scholar
[25] Poultney A, Kennedy C, Clayton GM, Ashrafiuon H. Robust tracking control of quadrotors based on differential flatness: simulations and experiments. IEEE/ASME Trans Mechatr. 2018;23(3):1126–37. 10.1109/TMECH.2018.2820426Search in Google Scholar
[26] Slotine JJE, Li W. Applied nonlinear control. Upper Saddle River (NJ), USA: Prentice Hall; 1991. Search in Google Scholar
[27] Slotine JJE, Coetsee J. Adaptive sliding controller synthesis for non-linear systems. Int J Control. 1986;43(6):1631–51. 10.1080/00207178608933564Search in Google Scholar
© 2023 the author(s), published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Research Articles
- The regularization of spectral methods for hyperbolic Volterra integrodifferential equations with fractional power elliptic operator
- Analytical and numerical study for the generalized q-deformed sinh-Gordon equation
- Dynamics and attitude control of space-based synthetic aperture radar
- A new optimal multistep optimal homotopy asymptotic method to solve nonlinear system of two biological species
- Dynamical aspects of transient electro-osmotic flow of Burgers' fluid with zeta potential in cylindrical tube
- Self-optimization examination system based on improved particle swarm optimization
- Overlapping grid SQLM for third-grade modified nanofluid flow deformed by porous stretchable/shrinkable Riga plate
- Research on indoor localization algorithm based on time unsynchronization
- Performance evaluation and optimization of fixture adapter for oil drilling top drives
- Nonlinear adaptive sliding mode control with application to quadcopters
- Numerical simulation of Burgers’ equations via quartic HB-spline DQM
- Bond performance between recycled concrete and steel bar after high temperature
- Deformable Laplace transform and its applications
- A comparative study for the numerical approximation of 1D and 2D hyperbolic telegraph equations with UAT and UAH tension B-spline DQM
- Numerical approximations of CNLS equations via UAH tension B-spline DQM
- Nonlinear numerical simulation of bond performance between recycled concrete and corroded steel bars
- An iterative approach using Sawi transform for fractional telegraph equation in diversified dimensions
- Investigation of magnetized convection for second-grade nanofluids via Prabhakar differentiation
- Influence of the blade size on the dynamic characteristic damage identification of wind turbine blades
- Cilia and electroosmosis induced double diffusive transport of hybrid nanofluids through microchannel and entropy analysis
- Semi-analytical approximation of time-fractional telegraph equation via natural transform in Caputo derivative
- Analytical solutions of fractional couple stress fluid flow for an engineering problem
- Simulations of fractional time-derivative against proportional time-delay for solving and investigating the generalized perturbed-KdV equation
- Pricing weather derivatives in an uncertain environment
- Variational principles for a double Rayleigh beam system undergoing vibrations and connected by a nonlinear Winkler–Pasternak elastic layer
- Novel soliton structures of truncated M-fractional (4+1)-dim Fokas wave model
- Safety decision analysis of collapse accident based on “accident tree–analytic hierarchy process”
- Derivation of septic B-spline function in n-dimensional to solve n-dimensional partial differential equations
- Development of a gray box system identification model to estimate the parameters affecting traffic accidents
- Homotopy analysis method for discrete quasi-reversibility mollification method of nonhomogeneous backward heat conduction problem
- New kink-periodic and convex–concave-periodic solutions to the modified regularized long wave equation by means of modified rational trigonometric–hyperbolic functions
- Explicit Chebyshev Petrov–Galerkin scheme for time-fractional fourth-order uniform Euler–Bernoulli pinned–pinned beam equation
- NASA DART mission: A preliminary mathematical dynamical model and its nonlinear circuit emulation
- Nonlinear dynamic responses of ballasted railway tracks using concrete sleepers incorporated with reinforced fibres and pre-treated crumb rubber
- Two-component excitation governance of giant wave clusters with the partially nonlocal nonlinearity
- Bifurcation analysis and control of the valve-controlled hydraulic cylinder system
- Engineering fault intelligent monitoring system based on Internet of Things and GIS
- Traveling wave solutions of the generalized scale-invariant analog of the KdV equation by tanh–coth method
- Electric vehicle wireless charging system for the foreign object detection with the inducted coil with magnetic field variation
- Dynamical structures of wave front to the fractional generalized equal width-Burgers model via two analytic schemes: Effects of parameters and fractionality
- Theoretical and numerical analysis of nonlinear Boussinesq equation under fractal fractional derivative
- Research on the artificial control method of the gas nuclei spectrum in the small-scale experimental pool under atmospheric pressure
- Mathematical analysis of the transmission dynamics of viral infection with effective control policies via fractional derivative
- On duality principles and related convex dual formulations suitable for local and global non-convex variational optimization
- Study on the breaking characteristics of glass-like brittle materials
- The construction and development of economic education model in universities based on the spatial Durbin model
- Homoclinic breather, periodic wave, lump solution, and M-shaped rational solutions for cold bosonic atoms in a zig-zag optical lattice
- Fractional insights into Zika virus transmission: Exploring preventive measures from a dynamical perspective
- Rapid Communication
- Influence of joint flexibility on buckling analysis of free–free beams
- Special Issue: Recent trends and emergence of technology in nonlinear engineering and its applications - Part II
- Research on optimization of crane fault predictive control system based on data mining
- Nonlinear computer image scene and target information extraction based on big data technology
- Nonlinear analysis and processing of software development data under Internet of things monitoring system
- Nonlinear remote monitoring system of manipulator based on network communication technology
- Nonlinear bridge deflection monitoring and prediction system based on network communication
- Cross-modal multi-label image classification modeling and recognition based on nonlinear
- Application of nonlinear clustering optimization algorithm in web data mining of cloud computing
- Optimization of information acquisition security of broadband carrier communication based on linear equation
- A review of tiger conservation studies using nonlinear trajectory: A telemetry data approach
- Multiwireless sensors for electrical measurement based on nonlinear improved data fusion algorithm
- Realization of optimization design of electromechanical integration PLC program system based on 3D model
- Research on nonlinear tracking and evaluation of sports 3D vision action
- Analysis of bridge vibration response for identification of bridge damage using BP neural network
- Numerical analysis of vibration response of elastic tube bundle of heat exchanger based on fluid structure coupling analysis
- Establishment of nonlinear network security situational awareness model based on random forest under the background of big data
- Research and implementation of non-linear management and monitoring system for classified information network
- Study of time-fractional delayed differential equations via new integral transform-based variation iteration technique
- Exhaustive study on post effect processing of 3D image based on nonlinear digital watermarking algorithm
- A versatile dynamic noise control framework based on computer simulation and modeling
- A novel hybrid ensemble convolutional neural network for face recognition by optimizing hyperparameters
- Numerical analysis of uneven settlement of highway subgrade based on nonlinear algorithm
- Experimental design and data analysis and optimization of mechanical condition diagnosis for transformer sets
- Special Issue: Reliable and Robust Fuzzy Logic Control System for Industry 4.0
- Framework for identifying network attacks through packet inspection using machine learning
- Convolutional neural network for UAV image processing and navigation in tree plantations based on deep learning
- Analysis of multimedia technology and mobile learning in English teaching in colleges and universities
- A deep learning-based mathematical modeling strategy for classifying musical genres in musical industry
- An effective framework to improve the managerial activities in global software development
- Simulation of three-dimensional temperature field in high-frequency welding based on nonlinear finite element method
- Multi-objective optimization model of transmission error of nonlinear dynamic load of double helical gears
- Fault diagnosis of electrical equipment based on virtual simulation technology
- Application of fractional-order nonlinear equations in coordinated control of multi-agent systems
- Research on railroad locomotive driving safety assistance technology based on electromechanical coupling analysis
- Risk assessment of computer network information using a proposed approach: Fuzzy hierarchical reasoning model based on scientific inversion parallel programming
- Special Issue: Dynamic Engineering and Control Methods for the Nonlinear Systems - Part I
- The application of iterative hard threshold algorithm based on nonlinear optimal compression sensing and electronic information technology in the field of automatic control
- Equilibrium stability of dynamic duopoly Cournot game under heterogeneous strategies, asymmetric information, and one-way R&D spillovers
- Mathematical prediction model construction of network packet loss rate and nonlinear mapping user experience under the Internet of Things
- Target recognition and detection system based on sensor and nonlinear machine vision fusion
- Risk analysis of bridge ship collision based on AIS data model and nonlinear finite element
- Video face target detection and tracking algorithm based on nonlinear sequence Monte Carlo filtering technique
- Adaptive fuzzy extended state observer for a class of nonlinear systems with output constraint
Articles in the same Issue
- Research Articles
- The regularization of spectral methods for hyperbolic Volterra integrodifferential equations with fractional power elliptic operator
- Analytical and numerical study for the generalized q-deformed sinh-Gordon equation
- Dynamics and attitude control of space-based synthetic aperture radar
- A new optimal multistep optimal homotopy asymptotic method to solve nonlinear system of two biological species
- Dynamical aspects of transient electro-osmotic flow of Burgers' fluid with zeta potential in cylindrical tube
- Self-optimization examination system based on improved particle swarm optimization
- Overlapping grid SQLM for third-grade modified nanofluid flow deformed by porous stretchable/shrinkable Riga plate
- Research on indoor localization algorithm based on time unsynchronization
- Performance evaluation and optimization of fixture adapter for oil drilling top drives
- Nonlinear adaptive sliding mode control with application to quadcopters
- Numerical simulation of Burgers’ equations via quartic HB-spline DQM
- Bond performance between recycled concrete and steel bar after high temperature
- Deformable Laplace transform and its applications
- A comparative study for the numerical approximation of 1D and 2D hyperbolic telegraph equations with UAT and UAH tension B-spline DQM
- Numerical approximations of CNLS equations via UAH tension B-spline DQM
- Nonlinear numerical simulation of bond performance between recycled concrete and corroded steel bars
- An iterative approach using Sawi transform for fractional telegraph equation in diversified dimensions
- Investigation of magnetized convection for second-grade nanofluids via Prabhakar differentiation
- Influence of the blade size on the dynamic characteristic damage identification of wind turbine blades
- Cilia and electroosmosis induced double diffusive transport of hybrid nanofluids through microchannel and entropy analysis
- Semi-analytical approximation of time-fractional telegraph equation via natural transform in Caputo derivative
- Analytical solutions of fractional couple stress fluid flow for an engineering problem
- Simulations of fractional time-derivative against proportional time-delay for solving and investigating the generalized perturbed-KdV equation
- Pricing weather derivatives in an uncertain environment
- Variational principles for a double Rayleigh beam system undergoing vibrations and connected by a nonlinear Winkler–Pasternak elastic layer
- Novel soliton structures of truncated M-fractional (4+1)-dim Fokas wave model
- Safety decision analysis of collapse accident based on “accident tree–analytic hierarchy process”
- Derivation of septic B-spline function in n-dimensional to solve n-dimensional partial differential equations
- Development of a gray box system identification model to estimate the parameters affecting traffic accidents
- Homotopy analysis method for discrete quasi-reversibility mollification method of nonhomogeneous backward heat conduction problem
- New kink-periodic and convex–concave-periodic solutions to the modified regularized long wave equation by means of modified rational trigonometric–hyperbolic functions
- Explicit Chebyshev Petrov–Galerkin scheme for time-fractional fourth-order uniform Euler–Bernoulli pinned–pinned beam equation
- NASA DART mission: A preliminary mathematical dynamical model and its nonlinear circuit emulation
- Nonlinear dynamic responses of ballasted railway tracks using concrete sleepers incorporated with reinforced fibres and pre-treated crumb rubber
- Two-component excitation governance of giant wave clusters with the partially nonlocal nonlinearity
- Bifurcation analysis and control of the valve-controlled hydraulic cylinder system
- Engineering fault intelligent monitoring system based on Internet of Things and GIS
- Traveling wave solutions of the generalized scale-invariant analog of the KdV equation by tanh–coth method
- Electric vehicle wireless charging system for the foreign object detection with the inducted coil with magnetic field variation
- Dynamical structures of wave front to the fractional generalized equal width-Burgers model via two analytic schemes: Effects of parameters and fractionality
- Theoretical and numerical analysis of nonlinear Boussinesq equation under fractal fractional derivative
- Research on the artificial control method of the gas nuclei spectrum in the small-scale experimental pool under atmospheric pressure
- Mathematical analysis of the transmission dynamics of viral infection with effective control policies via fractional derivative
- On duality principles and related convex dual formulations suitable for local and global non-convex variational optimization
- Study on the breaking characteristics of glass-like brittle materials
- The construction and development of economic education model in universities based on the spatial Durbin model
- Homoclinic breather, periodic wave, lump solution, and M-shaped rational solutions for cold bosonic atoms in a zig-zag optical lattice
- Fractional insights into Zika virus transmission: Exploring preventive measures from a dynamical perspective
- Rapid Communication
- Influence of joint flexibility on buckling analysis of free–free beams
- Special Issue: Recent trends and emergence of technology in nonlinear engineering and its applications - Part II
- Research on optimization of crane fault predictive control system based on data mining
- Nonlinear computer image scene and target information extraction based on big data technology
- Nonlinear analysis and processing of software development data under Internet of things monitoring system
- Nonlinear remote monitoring system of manipulator based on network communication technology
- Nonlinear bridge deflection monitoring and prediction system based on network communication
- Cross-modal multi-label image classification modeling and recognition based on nonlinear
- Application of nonlinear clustering optimization algorithm in web data mining of cloud computing
- Optimization of information acquisition security of broadband carrier communication based on linear equation
- A review of tiger conservation studies using nonlinear trajectory: A telemetry data approach
- Multiwireless sensors for electrical measurement based on nonlinear improved data fusion algorithm
- Realization of optimization design of electromechanical integration PLC program system based on 3D model
- Research on nonlinear tracking and evaluation of sports 3D vision action
- Analysis of bridge vibration response for identification of bridge damage using BP neural network
- Numerical analysis of vibration response of elastic tube bundle of heat exchanger based on fluid structure coupling analysis
- Establishment of nonlinear network security situational awareness model based on random forest under the background of big data
- Research and implementation of non-linear management and monitoring system for classified information network
- Study of time-fractional delayed differential equations via new integral transform-based variation iteration technique
- Exhaustive study on post effect processing of 3D image based on nonlinear digital watermarking algorithm
- A versatile dynamic noise control framework based on computer simulation and modeling
- A novel hybrid ensemble convolutional neural network for face recognition by optimizing hyperparameters
- Numerical analysis of uneven settlement of highway subgrade based on nonlinear algorithm
- Experimental design and data analysis and optimization of mechanical condition diagnosis for transformer sets
- Special Issue: Reliable and Robust Fuzzy Logic Control System for Industry 4.0
- Framework for identifying network attacks through packet inspection using machine learning
- Convolutional neural network for UAV image processing and navigation in tree plantations based on deep learning
- Analysis of multimedia technology and mobile learning in English teaching in colleges and universities
- A deep learning-based mathematical modeling strategy for classifying musical genres in musical industry
- An effective framework to improve the managerial activities in global software development
- Simulation of three-dimensional temperature field in high-frequency welding based on nonlinear finite element method
- Multi-objective optimization model of transmission error of nonlinear dynamic load of double helical gears
- Fault diagnosis of electrical equipment based on virtual simulation technology
- Application of fractional-order nonlinear equations in coordinated control of multi-agent systems
- Research on railroad locomotive driving safety assistance technology based on electromechanical coupling analysis
- Risk assessment of computer network information using a proposed approach: Fuzzy hierarchical reasoning model based on scientific inversion parallel programming
- Special Issue: Dynamic Engineering and Control Methods for the Nonlinear Systems - Part I
- The application of iterative hard threshold algorithm based on nonlinear optimal compression sensing and electronic information technology in the field of automatic control
- Equilibrium stability of dynamic duopoly Cournot game under heterogeneous strategies, asymmetric information, and one-way R&D spillovers
- Mathematical prediction model construction of network packet loss rate and nonlinear mapping user experience under the Internet of Things
- Target recognition and detection system based on sensor and nonlinear machine vision fusion
- Risk analysis of bridge ship collision based on AIS data model and nonlinear finite element
- Video face target detection and tracking algorithm based on nonlinear sequence Monte Carlo filtering technique
- Adaptive fuzzy extended state observer for a class of nonlinear systems with output constraint