Research on nonlinear tracking and evaluation of sports 3D vision action
-
 ,
,

Abstract
In order to effectively upgrade the training quality of the athlete, the study of the three-dimensional optical steps of sports, a three-dimensional optical action amplitude tracing process based on improved reverse kinematics is discussed. The method passes through a pinhole camera, the model calibrate the camera imaging plane, the positioning mark appears in the marker point in the apart neighboring single-sequence action amplitude and then the five-point perspective imaging of the same line is captured on the same straight line by the camera on different positions and postures. The matching method’s accuracy and superiority are demonstrated through experimental evaluation and compared with other similar measures. This characteristic is distinguished by the left and right image frames of the same camera. The translational movement is altered in 10–80 mm/s and the rotational movement is adjusted in 10–300 mm/s. During the confirmation, the spinning of the operational target, the longitudinal movement and the spatial location of the rotation point Measurement, the calculation variability of the stereoscopic visual moving calculation system, is given, and the method of tracking the method is high, which lay the foundation for the promotion of the training quality of the athlete. The experimental findings from simulation demonstrate that the implemented approach has great searching accuracy, establishing a solid platform for further improving the quality of athletes’ training.
1 Introduction
With the quick growth of science and mechanics, the motion testing equipment applied in industrial, agriculture, traffic, medical, and aerospace fields requires higher detection accuracy and more flexible detection. In order to meet these requirements, in the past few years, three-dimensional (3D) sports testing technology and equipment have been widely developed. They are widely used in mechanical manufacturing, aerospace, electronics industry, medical rehabilitation, traffic supervision, sports analysis, virtual reality, and other 3D motion detection tasks [1]. As a new 3D motion measurement technology, the motion measurement is liberated from the constraint of traditional contact measurement and has developed new ideas in the field of sports measurement. A complete set of mass sports teaching systems involve 3D human motion capture, 3D human action reconstruction, and 3D human action analysis [2]. The manufacturing of 3D animated characters is challenging, and motion-pose capture technology is very complex. The 3D visual motion approach cannot effectively acquire the full set of contour data. In order to successfully increase the training quality of athletes, the 3D visual motion amplitude tracking approach is investigated in sports. The markers in the adjacent monocular sequence motion amplitude images, however, cannot be determined when the current approach is employed for motion amplitude tracking. Through a wide range of commercial product research and literature summary, although there are some high-end sports capture and analysis systems for professional athletes, training these systems are extremely expensive and they cannot directly promote the number of ordinary people in the number of people teach. The current teaching system is still in the experimental research stage and there are two problems: (i) The human body model is rough and the body model in the exercise reconstruction process is single, and the public teaching system is more favored in realistic. Personalized body model: (ii) Existing research main focusing capture and reconstruction the lack of effective analysis of problems in motion effects and motion. For stereo visual motion measurement systems, the 3D moving version for establishing a moving target is a key step. According to the features of progression and time of the spatial movement target motion, this work proposes an acceptable frictional body motion assumption and a spiral target 3D motion representation, and the corresponding movement is designed based on the spiral target of the spin-based target self-rotation center [3]. In the demonstration of unrevealed motion, target motion, and shape structure, the algorithm enables accurate measurement of the 3D span moving target self-rotation center and related motion parameters. During the motion parameter calculation, the characteristic point data are separately used by the minimum number of two algorithms and the LMEDs algorithm, thereby minimizing the impact of noise intercession on motion observation results, and correctly finishing the motion observation task. This work gives the measurement unreliability of the stereoscopic motion measurement technique through simulation and real test [4].
Steinberg and Leal proposed a 3D optical action amplitude tracking process based on the introduction of visual attention mechanism. The method first attracts the visual attention mechanism to the 3D optical action amplitude searching process, and extracts various 3D optical response amplitudes in sports, and uses this feature to complete a 3D optical action amplitude searching in sports [5]. Furthermore, huge structural displacements have been efficiently monitored in recent years employing machine vision and digital close-range measurement. The suggested visual displacement sensor can measure many locations at the same time and has overcome the limitations of traditional displacement sensors. Non-contact measurement, high precision, lack of electromagnetic interference, high degree of informationization, rapid on-site installation, and simple operation are all advantages of multi-point 3D spatial coordinates [6,7]. One of the key research areas in computer vision is binocular stereo vision technology [8,9], a type of multi-eye vision measuring technology. In order to obtain a set of stereo image pairs containing scene depth information, it puts two vision sensors in various locations and simultaneously observes the same scene from multiple angles [10]. The proposed methodology is simpler but there is a problem with poor tracking stability. Wagner et al. studied the 3D optical action amplitude searching process based on sports with unparalleled global visual feedback. This method utilizes the Jacques matrix, straight from the figure, measures the position error between the optical action and the movement amplitude, and calculates the desired action obtained by eliminating the error and this is based on the 3D optical reaction amplitude of the completion of the sports track. This method is powerful, other than that when the current process is implemented for motion response amplitude tracking, the marker point in the corresponding single-grade action amplitude image cannot be measured, and there is a problem with a 3D optical action amplitude searching error [11].
This study has concentrated mostly on computer vision techniques used to carry out various activities in order to deliver increased information, such as extensive complicated analysis in numerous SPORTS and to improve the performance of athletes. This research will aid in dealing with sophisticated athlete training because there is a large research scope in sports for deploying computer vision methods in numerous sports. Through simulation and real-world testing, the research demonstrates the measurement inaccuracy of the stereoscopic motion measuring approach. The matching method’s accuracy and its versality are demonstrated through test verification and comparison with other matching algorithms. In this work, according to the characteristics of motion measurement and perspective imaging system, the characteristic matching algorithm based on five-point cross-contrasting univariate principle and the corresponding feature marker structure design is proposed. This matching method utilizes a 5-point perspective imaging on different locations and points towards the five-point perspective imaging of the same straight ratio. This feature is established in the left, right, and straight in the same camera. The correctness and superiority of the matching method is proved by test verification and comparison with other matching algorithms [12]. In this study, our approach will proceed with the 3D optical reaction amplitude in which the positioning mark appears in the marker point apart from neighboring single-sequence action amplitude and then the five-point perspective imaging on the same straight line by the camera on different positions and postures is done. In our strategy, we are enhancing images by employing Wavelet transform technique to characterize features in the images. The stereoscopic visual movement calculation of the system and its calculation variability are given, and the way of tracking the method is high, forming the basis for the athlete’s training quality to improve.
2 Methodology
Although the proposed methodology employed is simpler but it suffers from severe tracking stability. The researchers investigated a 3D optical action amplification seeking strategy based on sports with unsurpassed global visual feedback. This approach, which is based on the 3D optical reaction amplitude of the completion of the sports track, uses the Jacques matrix to measure the position error between the optical action and the movement amplitude, then calculates the required action by eliminating the error. The indicator point in the corresponding single-grade action signal image cannot be measured, so there is a problem with a 3D optical action amplitude searching error when the current process is used for movement response amplitude monitoring and hence suffers from severe tracking stability. Thus, in this work, according to the characteristics of motion measurement and perspective imaging system, the characteristic matching algorithm based on five-point cross-contrasting univariate principle and the corresponding feature marker structure design is employed. In 3D optical reaction amplitude, the positioning mark appears in the marker point in the apart neighboring single-sequence action amplitude and then the five-point perspective imaging of the same line on the same straight line is done using the camera on different positions and postures. Hence, we can conclude that our strategy is based on lighting independent improved wavelet scale multiplication and fuzzy edge enhancement approaches, we offer a new algorithm for visual noise suppression, target edge recognition, and edge extraction with increased detection accuracy and adaptability.
2.1 3D visual range of motion tracking in sports
The noise suppression in dynamic sequence images and the accurate positioning of target edges are key techniques in motion parameter measurements based on sequence images. Different from target edge detection under static conditions, the accurate noise removal and the positioning of the target edge is related to the camera and light source due to the movement of the target. Therefore, in this project, based on the research and analysis of the original image suppression noise and target edge detection methods, we propose a new algorithm for image noise suppression, target edge detection, and edge extraction with higher detection accuracy and higher adaptability based on lighting independent improved wavelet scale multiplication and fuzzy edge enhancement techniques. Specific steps are shown in Figure 1. In Figure 1, original image is given as an input to the wavelet transform that is a powerful tool for image processing which further processes the image by undergoing several steps of lighting independent which is a de-noising technique based on measured lighting field for removal of the noise further in wavelet scale multiplication. Two adjacent scales are multiplied as a product function to magnify the edge structures and suppresses the noise further to pass the results to the fuzzy enhancement that is employed for adaption and filtering techniques to offer a suitable framework and produce the final filtered image.
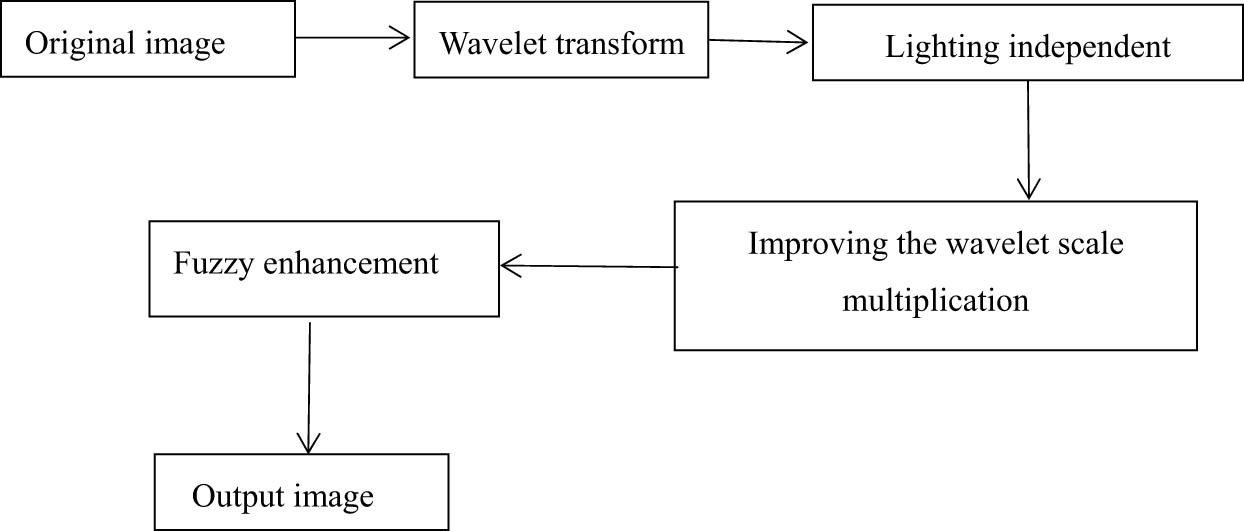
Schematic diagram of the edge detection flow.
Any physical space can be characterized in its motion by a 3D velocity field, projected in the two-dimensional plane that constitutes a two-dimensional velocity field, known as an optical flow. The concept of light flow was originally proposed by Gibson, when the target moves, its resulting images undergo a series of changes, this changing information is as if light is flowing, so it is called “light flow.” The motion detection algorithm depends on light flow in order to investigate the distribution of light flow, which is generally divided into two steps: first calculate the image light flow; and then obtain the target motion and structure information from the light flow [13]. The calculation of the light flow requires various additional restrictions and the motion and structure recovered by the light flow must also be based on the necessary assumptions, such as the light flow changes are smooth, the target surface is smooth, etc. After obtaining the relationship between the light flow and the target motion parameters and the structure parameters, the relevant equations can be solved to obtain the desired motion information. A motion estimation algorithm based on optical flow is briefly presented below. Optical flow method generally corresponds to the process of processing short-time small displacement in human vision. For the first time this paper proposes the “basic equation” between gray scale change and light flow in continuous motion estimation processing, thus opening a new field of research: the brightness function set at t moment, (x,y) position is I(x,y,t), assuming its instantly constant namely dI/dt = 0, expanded (1):
Let
where
The above formula is the “basic equation.” One of the most important features and advantages of the optical flow method is that it does not need to establish a matching of the corresponding features during the motion detection process between the images. However, the inability to solve the “basic equality” from those proposed by horn and shrunk to solve two unknowns simultaneously is an unsettled problem which brings difficulties for continuous processing, for which the various algorithms feature in how to overcome the discomfort qualitatively [14,15]. Existing continuous processing algorithms can be divided into two sections, namely, constraint and unconstrained, which can be divided into grayscale and speed assumptions.
The single visual motion measurement system is measured using a single camera and related attachment placed on the measurement site for the calculation of 3D motion parameters of the measured motion target. This method uses a single sequence image to establish equations containing target motion parameters and structural parameters, as in consideration of a two-dimensional image, therefore, sometimes the motion measurement method corresponds to
The auxiliary tool as a 3D motion measurement utilizes sensor fusion techniques, combined with other motion sensors to complete the measurement of motion target related to motion parameters.
The 3D motion measurement is performed separately by the prior knowledge, and the known motion targets the known feature of the structure and the motion target of the test target, and the known motion re-frame such as robot navigation, spacecraft docking, human body finger motion analysis [16].
2.1.1 Optimization scanning of 3D optical response amplitude in sports
Suppose G(x,y,
where, I(x, y) stands for the starting image coordinate, and L (x, y,
It is assumed that the Euclidean distance between
During the 3D optical response amplitude optimization tracking in any sports, the integrated 3D spatial point is brought into the camera imaging plane, positioning a 3D optical action amplitude marker point, giving the current time markup point status prediction equation, and removing error candidate points [17]. The generic methodology is discussed below: supposing that the total cameras is MTA,
where
It is assumed that the starting maximum threshold measure of
During the 3D optical action amplitude optimization searching process of sports, the period of response action amplitude effect is given by the acquisition error candidate point prediction area, and the three-order self-regression model tracking of the action amplitude track is obtained. A 3D optical action is given in the probability of external search area, in this regard, based on the 3-dimensional virtual response amplitude tracking in sports [18]. The specific procedure is discussed below. Suppose from
where
Suppose,
where
It is assumed that the selection registration area selected from the generation of
where
2.1.2 Utilities of 3D motion in the field of sport
3D motion analysis systems, which utilize markers to track motion, are expensive and time-consuming. As a result of the nature of biomechanics research, most studies have had a very small number of trials, making it difficult to apply modern analysis techniques such as machine learning techniques. In most biomechanics investigations with big datasets, researchers employ educated predictions for data reduction before beginning data gathering, and they are confined to investigating only a few variables at specific occurrences (e.g., shoulder flexion angle at ball release). Researchers have begun to utilize more complex analytic methods, such as principal component analysis, support vector machines, and regressions on larger datasets, as computers and computational technologies have evolved.
3 Experimental analyses
An experiment is required to demonstrate the effectiveness of the proposed 3D virtual response amplitude searching technique in sports based on improved reverse kinematics. An experimental simulation platform for 3D virtual movement amplitude scanning in sports was built under MATLAB environment. Experimental data came from boxing match video records in 2012. Using the reverse kinematics and the non-calibration global visual feedback method, the tracking results of two different methods are compared, Figure 2 and Table 1.
Comparison of tracking results of two different methods.
The F values obtained by the different edge detection techniques
| Evaluation factor | Technique 1 | Technique 2 | Technique 3 | Technique 4 | Technique 5 |
|---|---|---|---|---|---|
| F | 0.7171 | 0.8521 | 0.8561 | 0.9615 | 0.9845 |
From Table 1 and Figure 2, the impact of motion amplitude searching depends on upgraded reverse kinematics which is better than the non-calibration global optical feedback process. This is mostly due to the 3D optical action amplitude searching in different sports using the improved reverse kinematics approach. First calibrating the camera photographic plane in accordance with the special hole camera architecture, locating mark area appearing in the range of action of an adjacent monocular pattern, and removing the incorrect candidates, this work ensures the effect of motion searching depending on improved reverse kinematics [19].
Using the reverse kinematics and the non-calibration method of global visual feedback, the stability of two different methods can be seen in Figure 3.
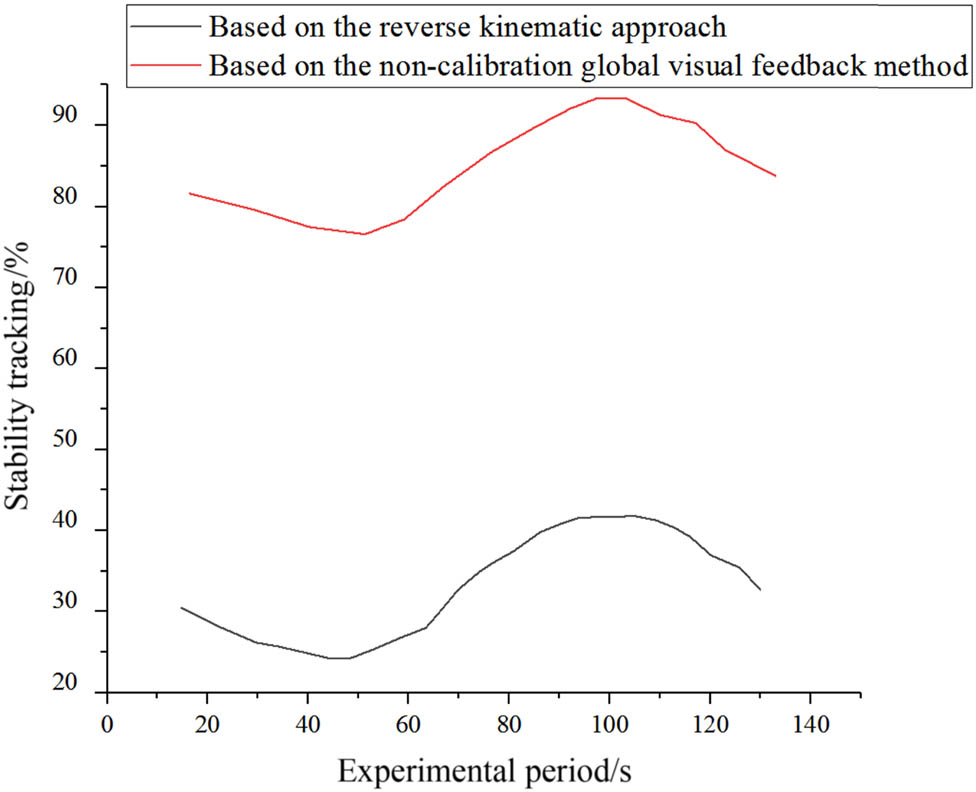
Stability comparison of different methods.
As is illustrated in Figure 3, the stability of 3D optical action amplitude tracking in sports is better than that of sports depends on the non-calibration global optical feedback process, this is mostly due to the usage of this process for tracking 3D optical response amplitude in the picture. To obtain a time series architecture of the range of action, given the probability of the 3D optical action amplitude outside the optimal region, depends on completing the 3D optical motion amplitude searching on sports. The response of the improved reverse kinematics method for 3D optical motion amplitude searching in sports is enhanced. Experimental results from simulation justifies that the implemented process has high searching accuracy that lays a strong foundation for further enhancing the training of athlete’s quality wise. To significantly promote the training quality of the player, amplitude tracing process based on improved reverse kinematics is used. The technique passes through a pinhole camera, the model synchronizes the camera imaging plane, and the alignment mark appears in the marker point in the apart adjoining single-sequence action magnitude, and then the camera on different positions and postures performs five-point perspective imaging of the same line on the same straight line. The left-right and distinct image frames of the same camera define this property.
4 Conclusion
This work studied the composition of stereo motion measurement system, image processing, 3D rigid motion object modeling, and rotation center measurement, and has passed the experimental test. According to the characteristics of motion measurement and perspective imaging system, the feature matching algorithm based on the five-point intersection ratio invariance principle and the corresponding feature marking bar structure design are presented. In this research, the characteristic matching method based on the five-point cross-contrasting unitary concept and the accompanying feature marker structure design are presented in accordance with the characteristics of motion measurement and perspective imaging systems. The translation motion value changes within 10–80 mm/s and the rotation motion value varies between 10 and 300/s, measuring the motion parameters such as rotation motion, translation motion, and spatial positioning from the rotation center. The matching method uses the camera at different positions and poses on the same line with space and establishes corresponding feature matching between different image frames of the left and right camera. The future scope of this research is that it will be very helpful in future studies. It can also provide a time series design of the range of action, given the likelihood of the 3D optical action amplitude outside the ideal area, and the responsiveness of the improved reverse kinematics approach for 3D optical motion amplitude seeking in sports is enhanced. The correctness and superiority of the matching method are proved by experimental verification and comparison with other matching methods.
-
Funding information: The authors state no funding involved.
-
Author contributions: All authors have accepted responsibility for the entire content of this manuscript and approved its submission.
-
Conflict of interest: The authors state no conflict of interest.
-
Data availability statement: The datasets generated during and/or analysed during the current study are available from the corresponding author on reasonable request.
References
[1] Gerasimov DN, Pashenko A, Nikiforov VO. Improved adaptive servotracking for a class of nonlinear plants with unmatched uncertainties. IFAC-PapersOnLine. 2020;53(2):3835–40.10.1016/j.ifacol.2020.12.2074Suche in Google Scholar
[2] Dmitry Z, Vladimir K. Small-amplitude nonlinear modes under the combined effect of the parabolic potential, nonlocality and PT symmetry. Symmetry. 2016;8(8):72.10.3390/sym8080072Suche in Google Scholar
[3] Zhou F, Cao L, Ma Y. Study on the visual motion tracking methods in national sports. Boletin Tecnico/Tech Bull. 2017;55(6):187–92.Suche in Google Scholar
[4] Oshita M, Inao T, Ineno S, Mukai T, Kuriyama S. Development and evaluation of a self-training system for tennis shots with motion feature assessment and visualization. Vis Comput. 2019;35(3):1–13.10.1007/s00371-019-01662-1Suche in Google Scholar
[5] Steinberg DS, Leal M. Visual motion detection and habitat preference in Anolis lizards. J Comp Physiol A. 2016;202(11):1–8.10.1007/s00359-016-1120-1Suche in Google Scholar PubMed
[6] Li H, Zhang B. Application of integrated binocular stereo vision measurement and wireless sensor system in athlete displacement test. Alex Eng J. 2021;60(5):4325–35.10.1016/j.aej.2021.02.033Suche in Google Scholar
[7] Zhang C, Yang F, Li G, Zhai Q, Jiang Y, Xuan D. MV-Sports: proposed a motion and vision sensor integration-based sports analysis system. IEEE INFOCOM 2018-IEEE Conference on Computer Communications; 2018 Apr 16–19; Honolulu (HI), USA. IEEE, 2018. p. 1070–8.10.1109/INFOCOM.2018.8485910Suche in Google Scholar
[8] Shao X, Eisa MM, Chen Z, Dong S, He X. Self-calibration single-lens 3D video extensometer for high-accuracy and real-time strain measurement. Opt Express. 2016;24(26):30124–38.10.1364/OE.24.030124Suche in Google Scholar PubMed
[9] Wang H, Xing C-Q, Gao J-G, Zhang S, Zhu KK. Detection of wheel-set size of rail vehicle using double 2D laser displacement sensors based on point cloud data registration in frequency domain. Opt Precis Eng. 2017;25(3):616–24.10.3788/OPE.20172503.0616Suche in Google Scholar
[10] Preuschl E, Hassmann M, Baca A. A kinematic analysis of the jumping front-leg axe-kick in Taekwondo. J Sports Sci Med. 2016;15(1):92–101.Suche in Google Scholar
[11] Wagner C, Stappenbeck L, Wenzel H, Steiner P, Birkholz P. Evaluation of a non-personalized optopalatographic device for prospective use in functional post-stroke dysphagia therapy. IEEE Trans Biomed Eng. 2021;99:1.10.1109/TBME.2021.3094415Suche in Google Scholar PubMed
[12] Keshavarz B, Philipp-Muller AE, Hemmerich W, Riecke BE, Campos JL. The effect of visual motion stimulus characteristics on vection and visually induced motion sickness. Displays. 2018;58(Jul):71–81.10.1016/j.displa.2018.07.005Suche in Google Scholar
[13] Ouyang PR, Pano V, Tang J, Yue WH. Position domain nonlinear PD control for contour tracking of robotic manipulator. Robot Comput-Integr Manuf. 2018;51(Jun):14–24.10.1016/j.rcim.2017.11.017Suche in Google Scholar
[14] Li X, Shen D, Ding B. Iterative learning control for output tracking of nonlinear systems with unavailable state information. IEEE Trans Neural Netw Learn Syst. 2021;99:1–8.10.1109/TNNLS.2021.3062633Suche in Google Scholar PubMed
[15] Rong M, Fu L-Y, Wang Z, Li X, Carpenter NS, Woolery EW, et al. On the amplitude discrepancy of HVSR and site amplification from strong-motion observations. Bull Seismol Soc Am. 2017;107:2873. 2018;108(1):552.10.1785/0120170118Suche in Google Scholar
[16] Sharma A, Singh PK, Sharma A, Kumar R. An efficient architecture for the accurate detection and monitoring of an event through the sky. Comput Commun. 2019;148:115–28. 10.1016/j.comcom.2019.09.009.Suche in Google Scholar
[17] Cisneros PG, Werner H. Fast nonlinear MPC for reference tracking subject to nonlinear constraints via quasi-LPV representations. IFAC-PapersOnLine. 2017;50(1):11601–6; Setiadi H, Mithulananthan N, Krismanto AU, Kamwa I. Optimization based design of dual input pss for improving small signal stability of power system with ress. Int J Electr Eng Inf 2019;11(4):778–95.10.1016/j.ifacol.2017.08.1650Suche in Google Scholar
[18] Sharma A, Kumar R, Koundal P. A tuning-based approach for the multi-constrained data-path transmission. Int J Control Appl (IJCTA). 2016;9(11):5521–8.Suche in Google Scholar
[19] Liang M. Optimization of quantitative financial data analysis system based on deep learning. Complexity. 2021;2021(1):1–11.10.1155/2021/5527615Suche in Google Scholar
© 2023 the author(s), published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Artikel in diesem Heft
- Research Articles
- The regularization of spectral methods for hyperbolic Volterra integrodifferential equations with fractional power elliptic operator
- Analytical and numerical study for the generalized q-deformed sinh-Gordon equation
- Dynamics and attitude control of space-based synthetic aperture radar
- A new optimal multistep optimal homotopy asymptotic method to solve nonlinear system of two biological species
- Dynamical aspects of transient electro-osmotic flow of Burgers' fluid with zeta potential in cylindrical tube
- Self-optimization examination system based on improved particle swarm optimization
- Overlapping grid SQLM for third-grade modified nanofluid flow deformed by porous stretchable/shrinkable Riga plate
- Research on indoor localization algorithm based on time unsynchronization
- Performance evaluation and optimization of fixture adapter for oil drilling top drives
- Nonlinear adaptive sliding mode control with application to quadcopters
- Numerical simulation of Burgers’ equations via quartic HB-spline DQM
- Bond performance between recycled concrete and steel bar after high temperature
- Deformable Laplace transform and its applications
- A comparative study for the numerical approximation of 1D and 2D hyperbolic telegraph equations with UAT and UAH tension B-spline DQM
- Numerical approximations of CNLS equations via UAH tension B-spline DQM
- Nonlinear numerical simulation of bond performance between recycled concrete and corroded steel bars
- An iterative approach using Sawi transform for fractional telegraph equation in diversified dimensions
- Investigation of magnetized convection for second-grade nanofluids via Prabhakar differentiation
- Influence of the blade size on the dynamic characteristic damage identification of wind turbine blades
- Cilia and electroosmosis induced double diffusive transport of hybrid nanofluids through microchannel and entropy analysis
- Semi-analytical approximation of time-fractional telegraph equation via natural transform in Caputo derivative
- Analytical solutions of fractional couple stress fluid flow for an engineering problem
- Simulations of fractional time-derivative against proportional time-delay for solving and investigating the generalized perturbed-KdV equation
- Pricing weather derivatives in an uncertain environment
- Variational principles for a double Rayleigh beam system undergoing vibrations and connected by a nonlinear Winkler–Pasternak elastic layer
- Novel soliton structures of truncated M-fractional (4+1)-dim Fokas wave model
- Safety decision analysis of collapse accident based on “accident tree–analytic hierarchy process”
- Derivation of septic B-spline function in n-dimensional to solve n-dimensional partial differential equations
- Development of a gray box system identification model to estimate the parameters affecting traffic accidents
- Homotopy analysis method for discrete quasi-reversibility mollification method of nonhomogeneous backward heat conduction problem
- New kink-periodic and convex–concave-periodic solutions to the modified regularized long wave equation by means of modified rational trigonometric–hyperbolic functions
- Explicit Chebyshev Petrov–Galerkin scheme for time-fractional fourth-order uniform Euler–Bernoulli pinned–pinned beam equation
- NASA DART mission: A preliminary mathematical dynamical model and its nonlinear circuit emulation
- Nonlinear dynamic responses of ballasted railway tracks using concrete sleepers incorporated with reinforced fibres and pre-treated crumb rubber
- Two-component excitation governance of giant wave clusters with the partially nonlocal nonlinearity
- Bifurcation analysis and control of the valve-controlled hydraulic cylinder system
- Engineering fault intelligent monitoring system based on Internet of Things and GIS
- Traveling wave solutions of the generalized scale-invariant analog of the KdV equation by tanh–coth method
- Electric vehicle wireless charging system for the foreign object detection with the inducted coil with magnetic field variation
- Dynamical structures of wave front to the fractional generalized equal width-Burgers model via two analytic schemes: Effects of parameters and fractionality
- Theoretical and numerical analysis of nonlinear Boussinesq equation under fractal fractional derivative
- Research on the artificial control method of the gas nuclei spectrum in the small-scale experimental pool under atmospheric pressure
- Mathematical analysis of the transmission dynamics of viral infection with effective control policies via fractional derivative
- On duality principles and related convex dual formulations suitable for local and global non-convex variational optimization
- Study on the breaking characteristics of glass-like brittle materials
- The construction and development of economic education model in universities based on the spatial Durbin model
- Homoclinic breather, periodic wave, lump solution, and M-shaped rational solutions for cold bosonic atoms in a zig-zag optical lattice
- Fractional insights into Zika virus transmission: Exploring preventive measures from a dynamical perspective
- Rapid Communication
- Influence of joint flexibility on buckling analysis of free–free beams
- Special Issue: Recent trends and emergence of technology in nonlinear engineering and its applications - Part II
- Research on optimization of crane fault predictive control system based on data mining
- Nonlinear computer image scene and target information extraction based on big data technology
- Nonlinear analysis and processing of software development data under Internet of things monitoring system
- Nonlinear remote monitoring system of manipulator based on network communication technology
- Nonlinear bridge deflection monitoring and prediction system based on network communication
- Cross-modal multi-label image classification modeling and recognition based on nonlinear
- Application of nonlinear clustering optimization algorithm in web data mining of cloud computing
- Optimization of information acquisition security of broadband carrier communication based on linear equation
- A review of tiger conservation studies using nonlinear trajectory: A telemetry data approach
- Multiwireless sensors for electrical measurement based on nonlinear improved data fusion algorithm
- Realization of optimization design of electromechanical integration PLC program system based on 3D model
- Research on nonlinear tracking and evaluation of sports 3D vision action
- Analysis of bridge vibration response for identification of bridge damage using BP neural network
- Numerical analysis of vibration response of elastic tube bundle of heat exchanger based on fluid structure coupling analysis
- Establishment of nonlinear network security situational awareness model based on random forest under the background of big data
- Research and implementation of non-linear management and monitoring system for classified information network
- Study of time-fractional delayed differential equations via new integral transform-based variation iteration technique
- Exhaustive study on post effect processing of 3D image based on nonlinear digital watermarking algorithm
- A versatile dynamic noise control framework based on computer simulation and modeling
- A novel hybrid ensemble convolutional neural network for face recognition by optimizing hyperparameters
- Numerical analysis of uneven settlement of highway subgrade based on nonlinear algorithm
- Experimental design and data analysis and optimization of mechanical condition diagnosis for transformer sets
- Special Issue: Reliable and Robust Fuzzy Logic Control System for Industry 4.0
- Framework for identifying network attacks through packet inspection using machine learning
- Convolutional neural network for UAV image processing and navigation in tree plantations based on deep learning
- Analysis of multimedia technology and mobile learning in English teaching in colleges and universities
- A deep learning-based mathematical modeling strategy for classifying musical genres in musical industry
- An effective framework to improve the managerial activities in global software development
- Simulation of three-dimensional temperature field in high-frequency welding based on nonlinear finite element method
- Multi-objective optimization model of transmission error of nonlinear dynamic load of double helical gears
- Fault diagnosis of electrical equipment based on virtual simulation technology
- Application of fractional-order nonlinear equations in coordinated control of multi-agent systems
- Research on railroad locomotive driving safety assistance technology based on electromechanical coupling analysis
- Risk assessment of computer network information using a proposed approach: Fuzzy hierarchical reasoning model based on scientific inversion parallel programming
- Special Issue: Dynamic Engineering and Control Methods for the Nonlinear Systems - Part I
- The application of iterative hard threshold algorithm based on nonlinear optimal compression sensing and electronic information technology in the field of automatic control
- Equilibrium stability of dynamic duopoly Cournot game under heterogeneous strategies, asymmetric information, and one-way R&D spillovers
- Mathematical prediction model construction of network packet loss rate and nonlinear mapping user experience under the Internet of Things
- Target recognition and detection system based on sensor and nonlinear machine vision fusion
- Risk analysis of bridge ship collision based on AIS data model and nonlinear finite element
- Video face target detection and tracking algorithm based on nonlinear sequence Monte Carlo filtering technique
- Adaptive fuzzy extended state observer for a class of nonlinear systems with output constraint
Artikel in diesem Heft
- Research Articles
- The regularization of spectral methods for hyperbolic Volterra integrodifferential equations with fractional power elliptic operator
- Analytical and numerical study for the generalized q-deformed sinh-Gordon equation
- Dynamics and attitude control of space-based synthetic aperture radar
- A new optimal multistep optimal homotopy asymptotic method to solve nonlinear system of two biological species
- Dynamical aspects of transient electro-osmotic flow of Burgers' fluid with zeta potential in cylindrical tube
- Self-optimization examination system based on improved particle swarm optimization
- Overlapping grid SQLM for third-grade modified nanofluid flow deformed by porous stretchable/shrinkable Riga plate
- Research on indoor localization algorithm based on time unsynchronization
- Performance evaluation and optimization of fixture adapter for oil drilling top drives
- Nonlinear adaptive sliding mode control with application to quadcopters
- Numerical simulation of Burgers’ equations via quartic HB-spline DQM
- Bond performance between recycled concrete and steel bar after high temperature
- Deformable Laplace transform and its applications
- A comparative study for the numerical approximation of 1D and 2D hyperbolic telegraph equations with UAT and UAH tension B-spline DQM
- Numerical approximations of CNLS equations via UAH tension B-spline DQM
- Nonlinear numerical simulation of bond performance between recycled concrete and corroded steel bars
- An iterative approach using Sawi transform for fractional telegraph equation in diversified dimensions
- Investigation of magnetized convection for second-grade nanofluids via Prabhakar differentiation
- Influence of the blade size on the dynamic characteristic damage identification of wind turbine blades
- Cilia and electroosmosis induced double diffusive transport of hybrid nanofluids through microchannel and entropy analysis
- Semi-analytical approximation of time-fractional telegraph equation via natural transform in Caputo derivative
- Analytical solutions of fractional couple stress fluid flow for an engineering problem
- Simulations of fractional time-derivative against proportional time-delay for solving and investigating the generalized perturbed-KdV equation
- Pricing weather derivatives in an uncertain environment
- Variational principles for a double Rayleigh beam system undergoing vibrations and connected by a nonlinear Winkler–Pasternak elastic layer
- Novel soliton structures of truncated M-fractional (4+1)-dim Fokas wave model
- Safety decision analysis of collapse accident based on “accident tree–analytic hierarchy process”
- Derivation of septic B-spline function in n-dimensional to solve n-dimensional partial differential equations
- Development of a gray box system identification model to estimate the parameters affecting traffic accidents
- Homotopy analysis method for discrete quasi-reversibility mollification method of nonhomogeneous backward heat conduction problem
- New kink-periodic and convex–concave-periodic solutions to the modified regularized long wave equation by means of modified rational trigonometric–hyperbolic functions
- Explicit Chebyshev Petrov–Galerkin scheme for time-fractional fourth-order uniform Euler–Bernoulli pinned–pinned beam equation
- NASA DART mission: A preliminary mathematical dynamical model and its nonlinear circuit emulation
- Nonlinear dynamic responses of ballasted railway tracks using concrete sleepers incorporated with reinforced fibres and pre-treated crumb rubber
- Two-component excitation governance of giant wave clusters with the partially nonlocal nonlinearity
- Bifurcation analysis and control of the valve-controlled hydraulic cylinder system
- Engineering fault intelligent monitoring system based on Internet of Things and GIS
- Traveling wave solutions of the generalized scale-invariant analog of the KdV equation by tanh–coth method
- Electric vehicle wireless charging system for the foreign object detection with the inducted coil with magnetic field variation
- Dynamical structures of wave front to the fractional generalized equal width-Burgers model via two analytic schemes: Effects of parameters and fractionality
- Theoretical and numerical analysis of nonlinear Boussinesq equation under fractal fractional derivative
- Research on the artificial control method of the gas nuclei spectrum in the small-scale experimental pool under atmospheric pressure
- Mathematical analysis of the transmission dynamics of viral infection with effective control policies via fractional derivative
- On duality principles and related convex dual formulations suitable for local and global non-convex variational optimization
- Study on the breaking characteristics of glass-like brittle materials
- The construction and development of economic education model in universities based on the spatial Durbin model
- Homoclinic breather, periodic wave, lump solution, and M-shaped rational solutions for cold bosonic atoms in a zig-zag optical lattice
- Fractional insights into Zika virus transmission: Exploring preventive measures from a dynamical perspective
- Rapid Communication
- Influence of joint flexibility on buckling analysis of free–free beams
- Special Issue: Recent trends and emergence of technology in nonlinear engineering and its applications - Part II
- Research on optimization of crane fault predictive control system based on data mining
- Nonlinear computer image scene and target information extraction based on big data technology
- Nonlinear analysis and processing of software development data under Internet of things monitoring system
- Nonlinear remote monitoring system of manipulator based on network communication technology
- Nonlinear bridge deflection monitoring and prediction system based on network communication
- Cross-modal multi-label image classification modeling and recognition based on nonlinear
- Application of nonlinear clustering optimization algorithm in web data mining of cloud computing
- Optimization of information acquisition security of broadband carrier communication based on linear equation
- A review of tiger conservation studies using nonlinear trajectory: A telemetry data approach
- Multiwireless sensors for electrical measurement based on nonlinear improved data fusion algorithm
- Realization of optimization design of electromechanical integration PLC program system based on 3D model
- Research on nonlinear tracking and evaluation of sports 3D vision action
- Analysis of bridge vibration response for identification of bridge damage using BP neural network
- Numerical analysis of vibration response of elastic tube bundle of heat exchanger based on fluid structure coupling analysis
- Establishment of nonlinear network security situational awareness model based on random forest under the background of big data
- Research and implementation of non-linear management and monitoring system for classified information network
- Study of time-fractional delayed differential equations via new integral transform-based variation iteration technique
- Exhaustive study on post effect processing of 3D image based on nonlinear digital watermarking algorithm
- A versatile dynamic noise control framework based on computer simulation and modeling
- A novel hybrid ensemble convolutional neural network for face recognition by optimizing hyperparameters
- Numerical analysis of uneven settlement of highway subgrade based on nonlinear algorithm
- Experimental design and data analysis and optimization of mechanical condition diagnosis for transformer sets
- Special Issue: Reliable and Robust Fuzzy Logic Control System for Industry 4.0
- Framework for identifying network attacks through packet inspection using machine learning
- Convolutional neural network for UAV image processing and navigation in tree plantations based on deep learning
- Analysis of multimedia technology and mobile learning in English teaching in colleges and universities
- A deep learning-based mathematical modeling strategy for classifying musical genres in musical industry
- An effective framework to improve the managerial activities in global software development
- Simulation of three-dimensional temperature field in high-frequency welding based on nonlinear finite element method
- Multi-objective optimization model of transmission error of nonlinear dynamic load of double helical gears
- Fault diagnosis of electrical equipment based on virtual simulation technology
- Application of fractional-order nonlinear equations in coordinated control of multi-agent systems
- Research on railroad locomotive driving safety assistance technology based on electromechanical coupling analysis
- Risk assessment of computer network information using a proposed approach: Fuzzy hierarchical reasoning model based on scientific inversion parallel programming
- Special Issue: Dynamic Engineering and Control Methods for the Nonlinear Systems - Part I
- The application of iterative hard threshold algorithm based on nonlinear optimal compression sensing and electronic information technology in the field of automatic control
- Equilibrium stability of dynamic duopoly Cournot game under heterogeneous strategies, asymmetric information, and one-way R&D spillovers
- Mathematical prediction model construction of network packet loss rate and nonlinear mapping user experience under the Internet of Things
- Target recognition and detection system based on sensor and nonlinear machine vision fusion
- Risk analysis of bridge ship collision based on AIS data model and nonlinear finite element
- Video face target detection and tracking algorithm based on nonlinear sequence Monte Carlo filtering technique
- Adaptive fuzzy extended state observer for a class of nonlinear systems with output constraint