Research on indoor localization algorithm based on time unsynchronization
-
Chen Chen
 ,
Lifang Liu
,
Lifang Liu

Abstract
Due to the influence of crystal vibration, clock offset, and clock skew, time synchronization error will be caused. This study introduces several algorithms to reduce or eliminate the influence of time synchronization error on positioning results, including iterative time-of-arrival algorithm, linear position line algorithm, classical CHAN algorithm, quadratic programming algorithm, and an improved algorithm for quadratic programming problem using weighted least squares algorithm. They are applied to two-dimensional (2D) single target, 2D multi-target, three-dimensional, and various positioning scenarios considering the influence of clock skew and clock offset for the simulation test, which overcomes the defect that the previous algorithm simulation test has few application scenarios. The results show that the iterative time-of-arrival algorithm has smaller root mean square error, higher positioning accuracy, and stable positioning results, and the algorithm has universal applicability to each positioning scene with time synchronization error.
1 Introduction
Global positioning system has been widely recognized by experts and researchers in various fields due to its wide application range and high positioning accuracy, and it can obtain relatively reliable location services when applied outdoors. However, due to the large number of facilities and relatively complex structure in the indoor environment, obstacles (pedestrians, walls, sofas, tables, and chairs) will appear in the process of signal transmission, resulting in the reflection, refraction, or scattering of the signal, which will lead to the reduction of intensity. According to incomplete statistics, nearly 80% of the human activities are carried out indoors. Indoor positioning, as an extension of positioning technology in the room, is widely used in public safety, emergency response, environmental monitoring, positioning and navigation, military reconnaissance, and targeting. In case of earthquake, fire, and other unexpected disasters, the indoor environment will change due to collapse, fire, and so on. It is difficult to quickly find the location of the rescued person according to the feeling of a blind search. While collecting information in the actual scene through unmanned aerial vehicle or other hardware equipment, using indoor positioning technology can quickly conduct search and rescue, which can save time and plan a safe rescue path. When you are in a railway station, high-speed railway station, airport, or underground parking lot, indoor positioning technology can provide users with navigation, parking, and car search services to improve user satisfaction. In the mall or warehouse, it can help users find the desired goods quickly and enhance the user experience. Therefore, the research on indoor high-precision positioning has become a hot topic.
Existing indoor positioning algorithms can be divided into range-based and range-free methods. Range-free methods do have some significant limitations, when it comes to radio signals and are not considered to be very accurate in general. The only exception might be the use of time of arrival (TOA) or time difference of arrival (TDOA) in ultra-wideband (UWB) systems. At present, common ranging techniques include TOA, TDOA, angle of arrival (AOA), received signal strength, and hybrid measurement techniques [1]. Among them, the technology based on TOA needs to measure the time synchronization. The technology based on TDOA does not need time synchronization, but at least three devices are required to participate in positioning. The price of hardware equipment based on AOA technology is high, and it is vulnerable to the multipath effect and shadow fading [2]. The technology based on the received signal strength requires an accurate signal attenuation model, which is vulnerable to the influence of channel and noise, and is only suitable for the positioning of short-range communication [3]. We know that the positioning algorithm based on time measurement is easy to obtain the observation value and is applicable to many cases, so it is widely used. The positioning method has strict requirements for clock synchronization between nodes, but due to the clock synchronization error between nodes, there will be an error in the time of receiving signal transmission. At the same time, there will be a gap between the distance value calculated by physical formula and the actual distance, and this distance value will be further designed and applied in the positioning algorithm, which will directly increase the final positioning error of the algorithm. Therefore, how to design an algorithm to eliminate the time synchronization error is particularly important in the positioning problem.
For strictly time-synchronized wireless systems, some conventional methods to suppress non-line-of-sight (NLOS) errors are feasible. However, when the device is a low time synchronization accuracy system, the time synchronization error caused by clock offset, clock skew, etc. will seriously affect the positioning accuracy. Some researchers weaken the influence of the time synchronization error on positioning accuracy by reducing or eliminating time delay. Kang and Wang [4,5] eliminated the time synchronization error by iteration, minimized the NLOS error by using the weighted least squares method, calculated the time synchronization error by using the least squares method in 2019, and iteratively applied the obtained time synchronization error to update the measured distance and correlation matrix until the time synchronization error was eliminated, so as to accurately locate the position of three-dimensional (3D) spatial source. Wu et al. [6] deduced a linear model by analyzing the nonlinear relationship between the error vector and variables, relaxing the condition of perfect time synchronization, and introduced the synchronization error into the TOA-based NLOS positioning model, which is suitable for asynchronous wireless networks. Tian et al. [7] theoretically analyzed the situation of non-ideal time synchronization, proposed a new quadratic constrained weighted least squares method considering clock synchronization deviation to improve positioning accuracy, and solved it by Lagrange multiplier technology. Elnahas et al. [8] proposed a maximum-likelihood estimation based on matrix completion theory to estimate the clock offset and clock skew under the Gaussian transmission delay model, so as to improve the accuracy in the presence of random transmission delay and packet loss.
There is existing work in combining time synchronization with node location coordinates. Yuan et al. [9] gave the factor graph representation of joint positioning and time synchronization based on TOA measurement. Using belief propagation messaging and variational messaging, two fully distributed cooperation algorithms with low computational requirements were deduced, which greatly reduced the communication overhead and computational complexity. Ma et al. [10] proved the significant influence of clock deviation on positioning accuracy through theoretical analysis and proposed a direct position determination method of jointly calibrating clock deviation by anchor source, including obtaining the rough estimation of parameters by expectation–maximization algorithm and refining the parameter estimation by Gauss–Newton algorithm. Zou et al. [11] developed a location algorithm based on semidefinite programming in the presence of clock synchronization offset and position error to effectively solve the nonconvex maximum-likelihood estimation problem. Wang et al. [12] based on the least squares estimation of the relative clock deviation of the arrival time difference estimated the internal clock parameters and the anchor node position by using the maximum-likelihood location of the anchor of the flight offset time and the least squares estimation of the relative clock offset.
Since the time synchronization error is multiplied by the propagation speed by the delay time, the error value is expressed by distance. This article mainly studies the cooperative localization algorithm with time synchronization error. First, five related positioning algorithms are introduced into the indoor positioning scene with time synchronization error, and then, the time synchronization error is transformed into the distance value, which is simulated and tested in two-dimensional (2D) single-target scene, 2D and 3D multi-target scenes, and the scene considering the influence of clock offset and clock skew. We find out the cooperative positioning algorithm with the best positioning performance to suppress or eliminate the time synchronization error.
The main innovation point of this study lies in the simulation test of the algorithm with time synchronization error under various scenarios to verify the universal applicability of the algorithm. The selection of various scenarios is the innovation place.
2 Introduction of related positioning algorithm
There are many technologies currently used in indoor positioning, including geomagnetic technology, Wi-Fi, Bluetooth, ultrasonic technology, laser technology, computer vision technology, and UWB. Due to high spatial and temporal resolution, good privacy protection, strong penetration, and high-precision positioning performance make UWB technology a good solution for indoor positioning. The algorithms compared in this study are all based on UWB.
This section mainly introduces five related positioning algorithms, namely, iterative TOA (iTOA), linear lines of position (LLOP), CHAN, quadratic programming (QP), and quadratic programming weighted least squares (QP-WLS).
2.1 Iterative TOA algorithm
Since the TOA-based positioning algorithm requires strict time synchronization, the accuracy requirements of the hardware are relatively strict and the cost is high. In order to reduce the influence of time asynchrony and NLOS error, Kang et al. [4,5] proposed an iterative algorithm based on TOA, first constructing a circle model equation set, and using the least squares method to linearize the nonlinear problem. Then, we construct the NLOS error matrix equation using the weighted least squares method and minimize the sum of the NLOS errors.
Eliminate time synchronization errors
The coordinates of the anchor node are
(1)where
The approximate measurement before the anchor node and the target node can be written as:
(2)This can be converted to the linearized matrix form:
(3)where
The estimate coordinates and time synchronization error can be obtained by the least squares method:
(4)Minimize the NLOS error
The error vector corresponding to the estimated position of the target node is as follows:
(5)where
The variance of
(6)The covariance of the NLOS measurement is the same as
(7)Iterate to obtain the final result
In practical application scenarios, the actual distance between the anchor node and the target node is unknown, and the actual distance
Step 1: Use the weighted least squares algorithm to obtain the initial estimation result as follows:
Step 2: Use the time synchronization error
where
Step 3: Obtain a new error matrix:
Step 4: Use the weighted least squares algorithm to obtain an improved solution:
Since the matrix
2.2 Linear position line algorithm
Caffery [13] proposed a new geometric interpretation in which position straight lines are used instead of circular LOPs to determine the position of the transmitter. Linear LOPs are derived from simple observations of system geometry, not linearization.
N distance equations can be expressed as:
The matrix form is
2.3 CHAN algorithm
CHAN algorithm [14] was proposed in 1994. It mainly transforms the nonlinear equation into a set of linear equations with unknown parameters and intermediate variables by introducing intermediate variables. First, the initial solution is given by using the least squares algorithm, and then, the final solution of the position coordinates is given by using the weighted least squares algorithm according to the relationship between the known intermediate variables and the position coordinates. The pseudo-code of the algorithm is shown in Table 1.
Pseudocodes of CHAN algorithm
| Algorithm: CHAN |
| Input: anchor node coordinate matrix
|
| Output: The estimated coordinates of the target node |
| 1: Initialization parameters: calculated
|
| 2: Calculated
|
| 3: The perturbation algorithm is used to approximate
|
| 4: Update the matrix
|
| 5: Update the matrix
|
| 6: The weighted least squares algorithm was used to obtain the final solution:
|
2.4 Quadratic programming
The measurement model is
To define a new vector
where
The aforementioned form can be transformed into a standard quadratic programming form:
The aforementioned QP problems [15] can be solved by the interior point method.
2.5 QP-WLS
Wu et al. [6] based on the solution of QP problem obtained in 2019 improved it by WLS algorithm. The estimation error of
where
The target node position and synchronization error are estimated as
3 Simulation test
The simulation test in this section starts with the simplest indoor positioning scene of 2D single target and finds the algorithm with the highest positioning accuracy under the same time synchronization error scene. Then, we consider the location of 2D multi-target and observe whether the error of the algorithm is still the lowest when the number of target nodes increases. When most positioning algorithms are extended to 3D positioning, the positioning results become worse due to the increase in the height information of the z-axis of the spatial coordinate system. Based on this background, considering the 3D multi-target positioning, we observe whether the positioning accuracy is seriously reduced. Finally, the positioning scenario of time synchronization error composed of clock drift and clock tilt is considered to evaluate whether the algorithm has universal applicability.
The coordinates of the first node are recorded as
where
3.1 Simulation test of 2D single-target positioning scene
Scenario description: one target node and seven anchor nodes are randomly deployed in a
Cumulative distribution function with NLOS error of 2 m and time synchronization error of 3 m
When the NLOS error is fixed at 2 m and the time synchronization error is fixed at 3 m, 1,000 Monte Carlo simulations are carried out for the five algorithms, and the cumulative distribution (CDF) diagram of RMSE of each algorithm is shown in Figure 1.
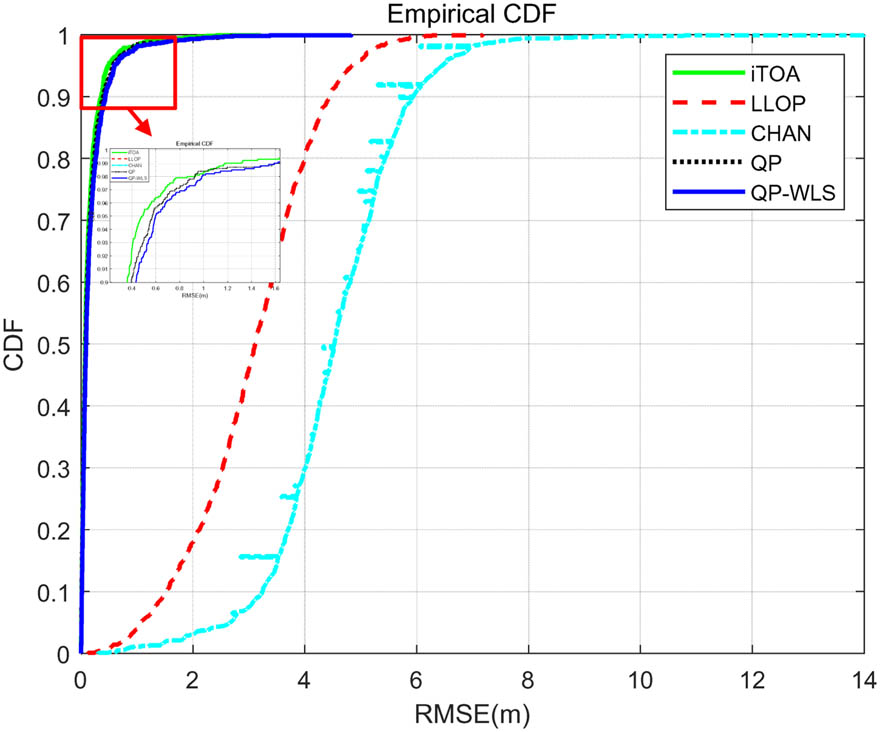
CDF of RMSE with NLOS error of 2 m and time synchronization error of 3 m.
It can be seen from Figure 1 that 90% of the RMSE data of iTOA, QP, and QP-WLS algorithms fall within 0.35, 0.44, and 0.48 m in 1,000 operations. However, 90% of the RMSE data of iTOA LLOP and CHAN algorithms fall within 4.51 and 5.97 m. It can be seen that when the NLOS error is fixed at 2 m and the time synchronization error is fixed at 3 m, the error of iTOA algorithm is relatively low.
Comparison of time synchronization errors under the same NLOS error value
When the NLOS error value is fixed at 2 m, the ALE of 1,000 Monte Carlo simulations performed by each algorithm under different time synchronization errors is shown in Table 2 and Figure 2.
ALE of each algorithm under different time synchronization error values
| Algorithm | 0 m | 0.3 m | 3 m | 6 m | 9 m | 12 m | 15 m | 18 m |
|---|---|---|---|---|---|---|---|---|
| iTOA | 0.1248 | 0.1466 | 0.1660 | 0.1542 | 0.1519 | 0.1550 | 0.1363 | 0.1473 |
| LLOP | 0.7543 | 0.9966 | 3.1368 | 5.4342 | 7.6442 | 10.0779 | 12.2298 | 14.4229 |
| CHAN | 1.1003 | 1.4207 | 4.5243 | 8.1008 | 11.7801 | 15.3541 | 18.7360 | 22.0871 |
| QP | 0.1463 | 0.1597 | 0.1872 | 0.1720 | 0.1646 | 0.1765 | 0.1625 | 0.1645 |
| QP-WLS | 0.1692 | 0.1750 | 0.2016 | 0.1832 | 0.1725 | 0.1887 | 0.1736 | 0.1739 |
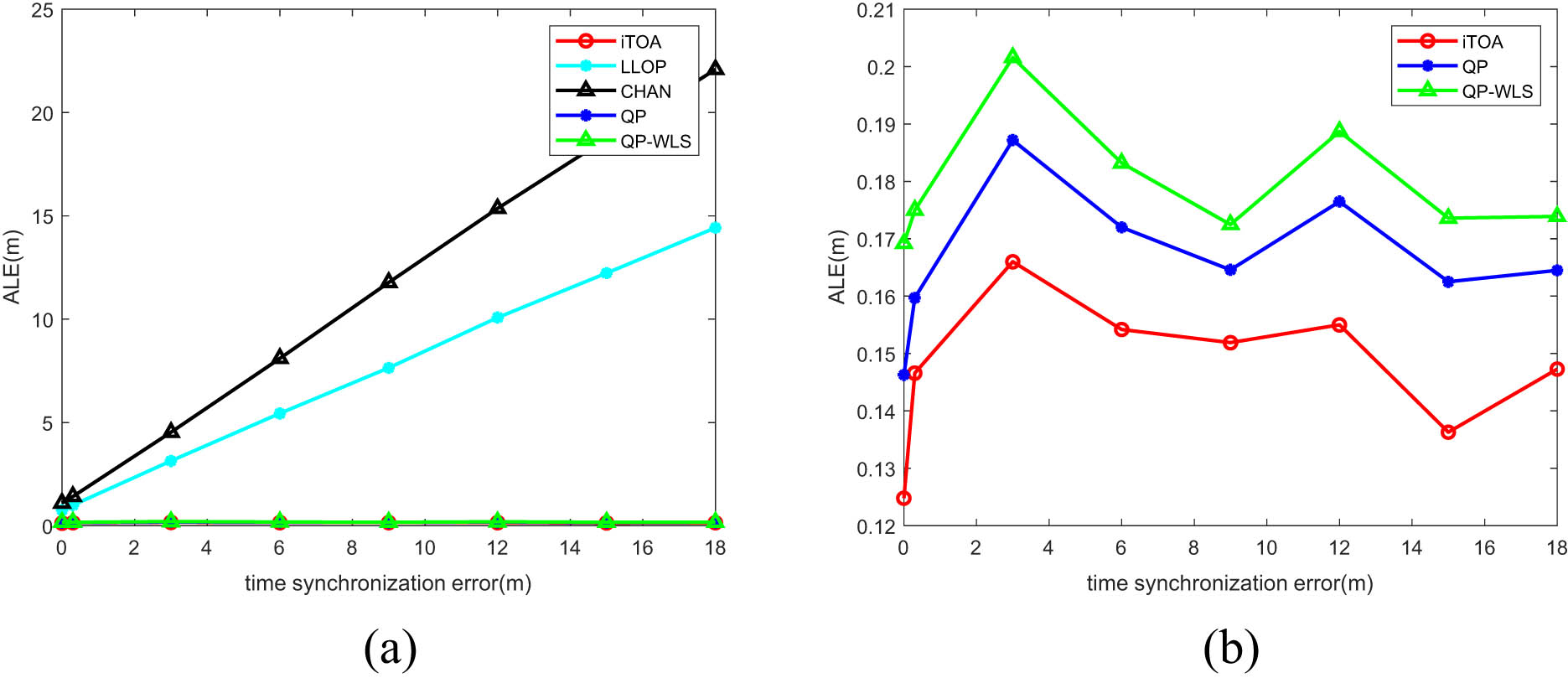
ALE of different time synchronization errors of five algorithms when the NLOS error value is fixed at 2m. (a) ALE diagram of five algorithms and (b) ALE diagram of three algorithms.
From the simulation results in Figure 2, when the NLOS error value is fixed at 2 m, comparing the positioning results under different time synchronization errors, it is found that the error of the CHAN algorithm is always the largest, and the ALE of the CHAN and LLOP algorithms changes with the time synchronization error value that increases monotonically. When the five algorithms are compared together, due to the large errors of the CHAN and LLOP algorithms, which are not in the same order of magnitude as other algorithms, the error changes of the other three algorithms are less obvious. By comparing the other three algorithms separately, it can be found that as the time synchronization error increases to 18 m, the average positioning error of each algorithm is less than 0.21 m, reaching the positioning accuracy of decimeter level, and iTOA algorithm shows the optimal positioning performance, followed by the solution of quadratic programming problem.
ALE table of each algorithm running 1,000 times under different NLOS error values
| Algorithm | 0 m | 2 m | 4 m | 6 m | 8 m | 10 m | 12 m | 14 m |
|---|---|---|---|---|---|---|---|---|
| iTOA | 0.1405 | 0.1730 | 0.1468 | 0.1405 | 0.1529 | 0.1502 | 0.1500 | 0.1542 |
| LLOP | 2.3266 | 3.0682 | 3.8390 | 4.6636 | 5.4900 | 6.1241 | 6.9921 | 7.7634 |
| CHAN | 3.3325 | 4.5028 | 5.6552 | 7.0366 | 8.1903 | 9.2751 | 10.5585 | 11.4646 |
| QP | 0.1597 | 0.2042 | 0.1724 | 0.1700 | 0.1720 | 0.1693 | 0.1708 | 0.1702 |
| QP-WLS | 0.1734 | 0.2174 | 0.1849 | 0.1795 | 0.1885 | 0.1823 | 0.1799 | 0.1810 |
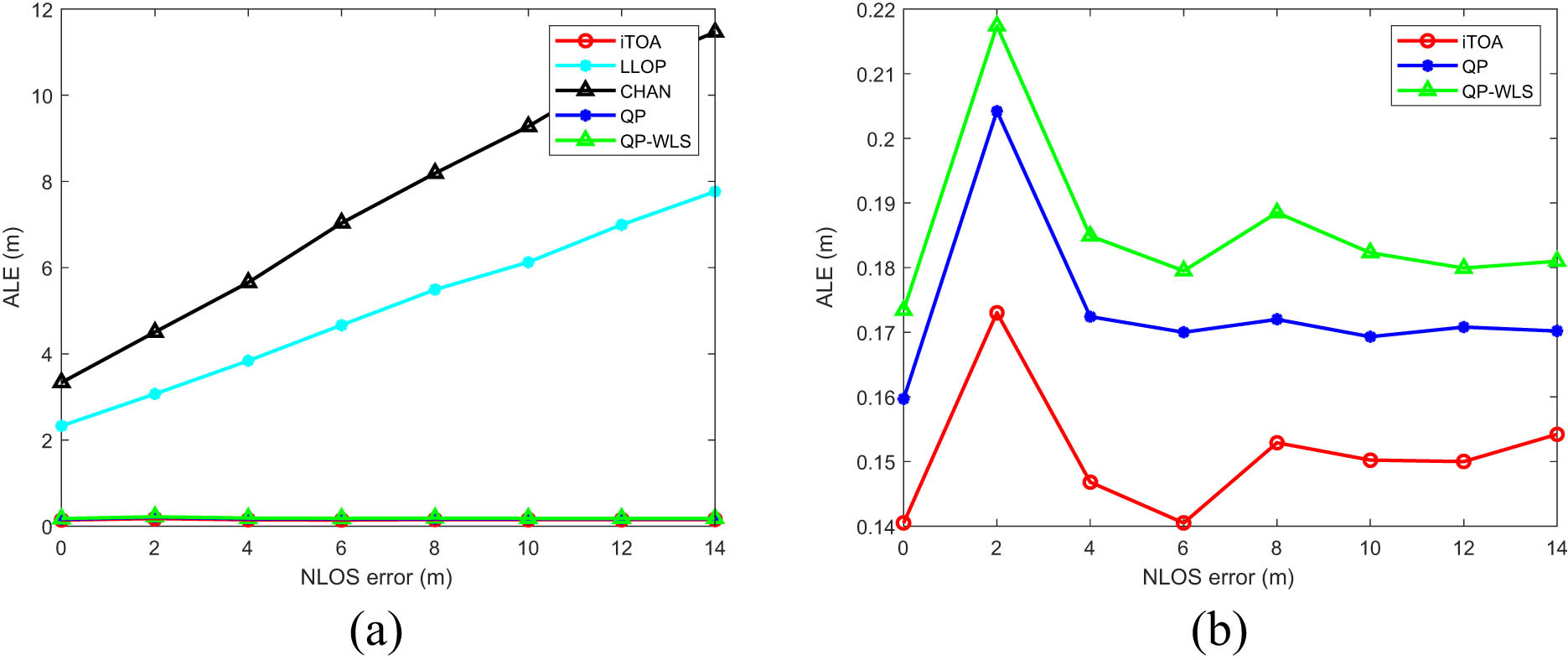
ALE of different time synchronization errors of five algorithms when the NLOS error value is fixed at 3m. (a) ALE diagram of five algorithms and (b) ALE diagram of three algorithms.
When the time synchronization error is fixed at 3 m, when comparing the positioning results of each algorithm under different NLOS error values, it is found that the error of the CHAN algorithm is still the largest. When the NLOS error value is 14 m, the average positioning error of the algorithm reaches nearly 10.6 m. The iTOA algorithm still shows the best positioning performance. When the NLOS error value is 14 m, the average positioning error of the algorithm is only 0.153 m.
3.2 Simulation test of 2D and 3D multi-target positioning scenarios
Five target nodes and ten anchor nodes are randomly generated in the 2D (
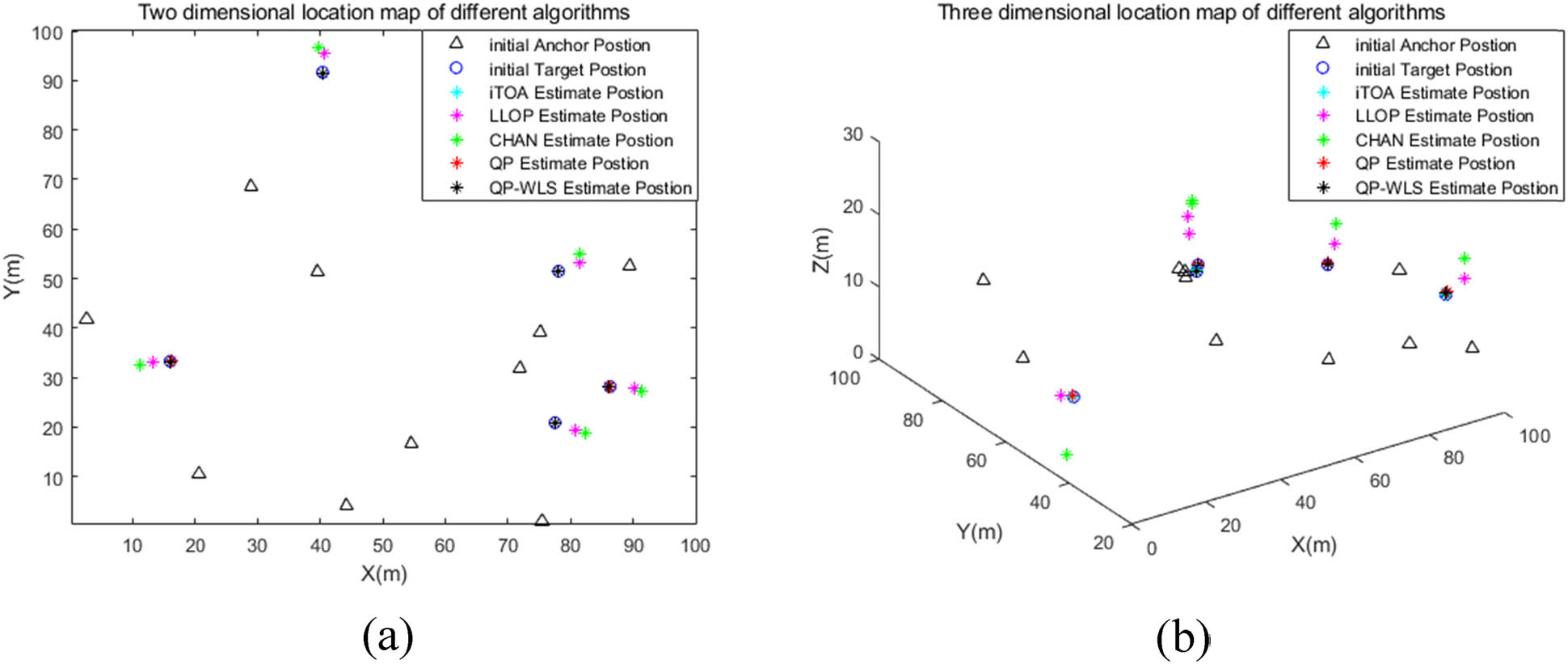
Multi-target localization scene. (a) 2D multi-target localization scene and (b) 3D multi-target localization scene.
The five different algorithms are Monte Carlo simulations 1,000 times, and the ALEs for 1,000 runs are shown in Table 4.
Errors of 1,000 independent runs of each algorithm
| Algorithm | 2D 1,000 times independent running ALE (m) | 3D 1,000 times independent running ALE (m) |
|---|---|---|
| iTOA | 0.0727 | 0.1086 |
| LLOP | 2.1829 | 2.3307 |
| CHAN | 3.1101 | 3.813 |
| QP | 0.0901 | 0.1276 |
| QP-WLS | 0.0974 | 0.222 |
The CDF of the RMSE for each run is shown in Figure 5.
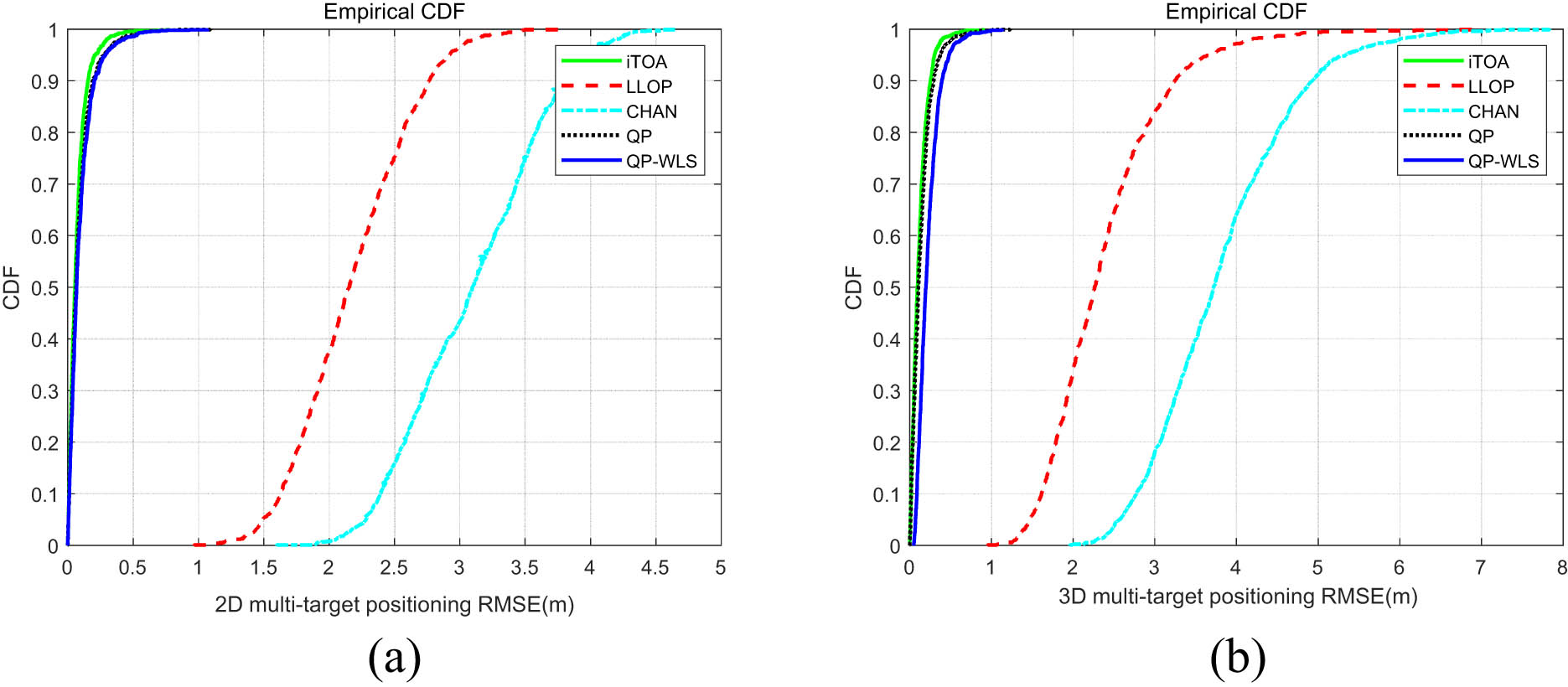
CDF of RMSE: (a) 2D CDF of RMSE and (b) 3D CDF of RMSE.
From the aforementioned simulation results, it can be seen that the positioning error of iTOA algorithm is the smallest, followed by QP and QP-WLS algorithms, whether it is extended from single-target positioning to multi-target positioning, or from 2D positioning to 3D positioning, and the error of CHAN algorithm is still the largest.
3.3 Simulation test considering clock offset and clock skew
The accuracy of computer clock depends on the accuracy of crystal oscillator frequency. Due to process and material reasons, the actual frequency of quartz crystals with the same nominal frequency on the same production line is different. The function of crystal oscillator is to provide basic clock signal for the system. Wang et al. [12] believed that the lack of synchronization on nodes may be attributed to each node having a unique clock, which means that the clock tilt and offset of each node are different. Local time of nodes can be modeled as:
where
In addition to considering clock offset, clock skew, NLOS error ratio, and time synchronization error ratio, this section also compares the simulation tests of five algorithms in four scenarios. The first scenario is that there is a sight distance between the anchor node and the target node and there is no noise. The second scenario is that there are NLOS errors and time synchronization errors between the anchor node and the target node, and the error values are the same. The third scenario is that there are partial NLOS and time synchronization errors (proportionally) between the anchor node and the target node, and the total error has the same impact on different nodes. The fourth scenario is that there are partial NLOS and time synchronization errors between the anchor node and the target node, and the total error has different effects on different nodes. Note: Scenarios 2–4 are affected by noise.
The first scenario is set to test whether the algorithm itself has problems. If the error of each algorithm is large without the influence of any error and noise, it indicates that the algorithm itself has problems. The second scenario and the third scenario can be used to compare the positioning accuracy of each algorithm when the proportion of time synchronization error and NLOS error is different. The third scenario and the fourth scenario can be used to compare the positioning accuracy of each algorithm when the proportion of time synchronization error and NLOS error is the same, but the error value is different.
When the time synchronization error accounts for 20% and NLOS error accounts for 0%, time synchronization error accounts for 20% and NLOS error accounts for 30%. Time synchronization error accounts for 50% and NLOS error accounts for 50%. When the time synchronization error accounts for 90% and the NLOS error accounts for 90%, the average positioning error results of the five algorithms running 1,000 times independently in four scenarios are shown in Figure 6.
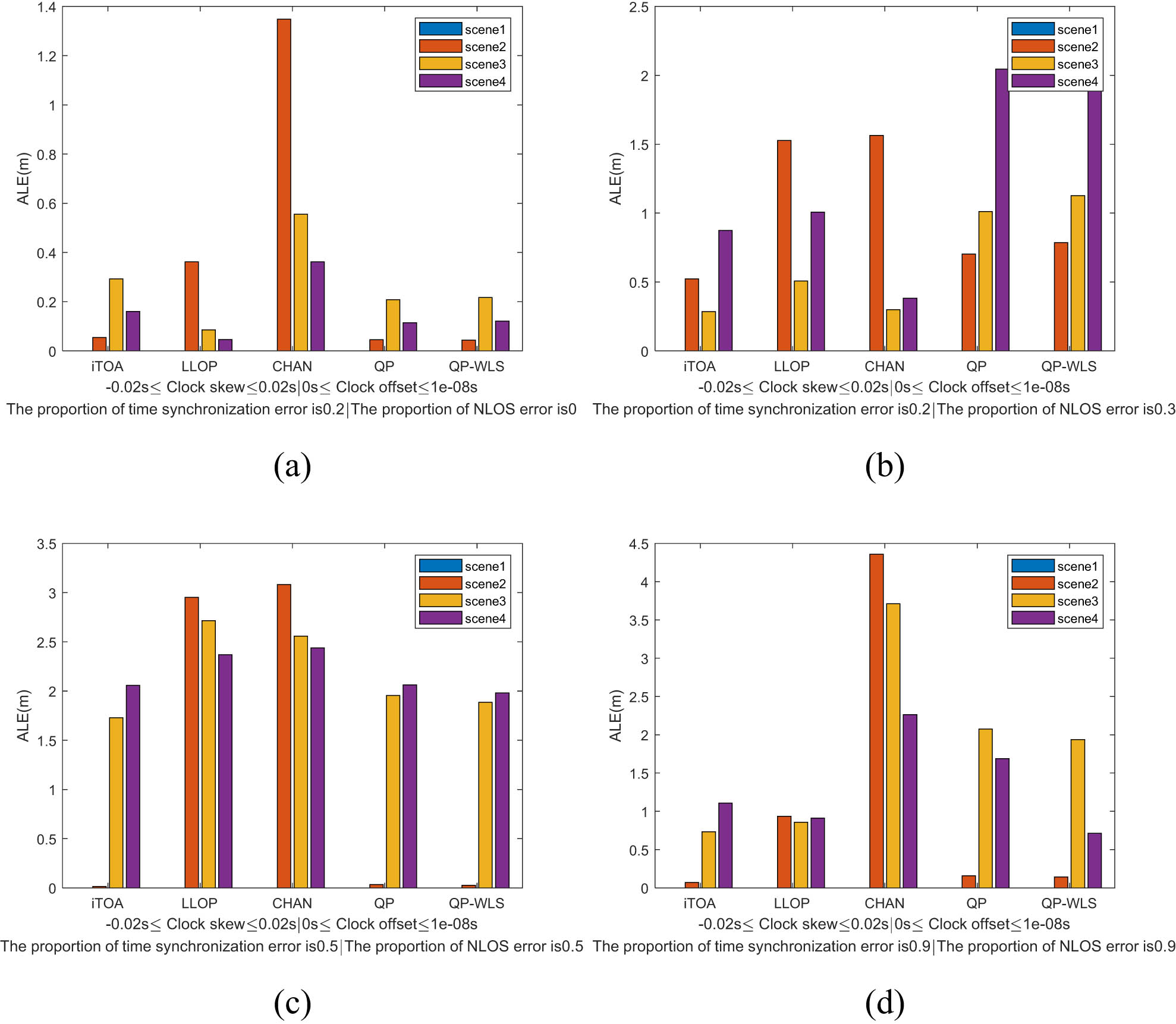
Average positioning error diagram of each algorithm when the proportion of time synchronization error and NLOS error is different. (a) The proportion of time synchronization error is 0; (b) The proportion of time synchronization error is 0.3; (c) The proportion of time synchronization error is 0.5; (d) The proportion of time synchronization error is 0.9.
Among them, the abscissa represents each algorithm, the ordinate represents the average positioning error of each algorithm running 1,000 times in each scenario, and different colors represent different scenarios. The data of Scenario 1 are not displayed, indicating that the average positioning error of the algorithm is also 0 when there is no time synchronization error and NLOS error, which further confirms that there is no problem in the design of these five algorithms. Comparing the second and third scenarios, it can be seen that with the reduction of the time synchronization error and the proportion of NLOS error, the average positioning errors of the LLOP algorithm and the CHAN algorithm have decreased, while the QP algorithm and the QP-WLS algorithm have increased instead. Comparing the third scenario and the fourth scenario, it is found that when the error has the same impact on nodes, iTOA algorithm has a better positioning effect. Overall, comparing the five algorithms, the iTOA algorithm still shows the best positioning performance, and the CHAN algorithm has the lowest positioning accuracy.
4 Conclusions
In the scenario with time synchronization error and NLOS error, iTOA, LLOP, CHAN, QP, and QP-WLS algorithm are simulated and tested. The results show that when there are NLOS errors and time synchronization errors between anchor node and target node, the localization results of 2D single-target and multi-target, and 3D multi-target show that iTOA algorithm has the smallest localization error, followed by QP and QP-WLS algorithm, and CHAN algorithm has the largest error. After considering the influence of NLOS error and time synchronization error ratio, clock offset, and clock skew, when the proportion of NLOS error and time synchronization error decreases, the localization error of some algorithms increases, and the error of CHAN algorithm is still the largest. In future research, we can consider how to use some anchor nodes to estimate the position of the target node, whether the algorithm is affected by the communication radius, and more detailed factors that cause NLOS error and time synchronization error.
-
Funding information: This research was supported by the National Natural Science Foundation of China (Grant No. 61877067), Foundations of Science and Technology on Near-Surface Detection Laboratory (TCGZ2019A002), and Key Laboratory Stability Support Project (Grant No. 6142414200511).
-
Author contributions: All author has accepted responsibility for the entire content of this manuscript and approved its submission.
-
Conflict of interest: The authors declare no conflict of interest in this study.
References
[1] Xu C, Wang Z, Wang Y, Wang Z, Yu L. Three passive TDOA-AOA receivers-based flying-UAV positioning in extreme environments. IEEE Sens J. 2020;20(16):9589–95.10.1109/JSEN.2020.2988920Search in Google Scholar
[2] Cao S, Chen X, Zhang X, Chen X. Combined weighted method for TDOA-based localization. IEEE Trans Instrum Meas. 2020;69(5):1962–71.10.1109/TIM.2019.2921439Search in Google Scholar
[3] Jondhale SR, Maheswar R, Lloret J. Received signal strength based target localization and tracking using wireless sensor network. EAI/Springer Innovations in Communication and Computing series. Berlin, Germany: Springer International Publishing; 2022. 10.1007/978-3-030-74061-0.Search in Google Scholar
[4] Kang YM, Wang JW. A high-precision TOA-based localization algorithm without the restriction of strict time synchronization for wireless systems. 2016 IEEE 13th International Conference on Signal Processing. (ICSP); 2016 Nov 6–10; Chengdu, China. IEEE, 2017. p. 1666–70.Search in Google Scholar
[5] Kang Y, Wang Q, Wang J, Chen R. A high-accuracy TOA-based localization method without time synchronization in a three-dimensional space. IEEE Trans Ind Inform. 2019;15(1):173–82.10.1109/TII.2018.2800047Search in Google Scholar
[6] Wu S, Zhang S, Huang D. A TOA-based localization algorithm with simultaneous NLOS mitigation and synchronization error elimination. IEEE Sens Lett. 2019;3(3):1–4.10.1109/LSENS.2019.2897924Search in Google Scholar
[7] Tian Q, Feng DZ, Hu HS. Constrained weighted least squares algorithm for TOA-based joint synchronization and localization. J Xidian Univ. 2019;46(5):1–7.Search in Google Scholar
[8] Elnahas O, Ma Y, Jiang Y, Quan Z. Clock synchronization in wireless networks using matrix completion-based maximum likelihood estimation. IEEE Trans Wirel Commun. 2020;19(12):8220–31.10.1109/TWC.2020.3020191Search in Google Scholar
[9] Yuan W, Wu N, Etzlinger B, Wang H, Kuang J. Cooperative joint localization and clock synchronization based on Gaussian message passing in asynchronous wireless networks. IEEE Trans Veh Technol. 2016;65(9):7258–73.10.1109/TVT.2016.2518185Search in Google Scholar
[10] Ma FH, Liu ZM, Guo FC. Direct position determination in asynchronous sensor networks. IEEE Trans Veh Technol. 2019;68(9):8790–803.10.1109/TVT.2019.2928638Search in Google Scholar
[11] Zou YB, Liu HP. Semidefinite programming methods for alleviating clock synchronization bias and sensor position errors in TDOA localization. IEEE Signal Process Lett. 2020;27:241–5.10.1109/LSP.2020.2965822Search in Google Scholar
[12] Wang T, Xiong H, Ding H, Zheng L. TDOA-based joint synchronization and localization algorithm for asynchronous wireless sensor networks. IEEE Trans Commun. 2020;68(5):3107–24.10.1109/TCOMM.2020.2973961Search in Google Scholar
[13] Caffery JJ. A new approach to the geometry of TOA location. Vehicular Technology Conference Fall 2000. IEEE VTS Fall VTC2000. 52nd Vehicular Technology Conference; 2000 Sep 20–24; Boston (MA), USA. IEEE, 2002. p. 1943–9.10.1109/VETECF.2000.886153Search in Google Scholar
[14] Chan YT, Ho KC. A simple and efficient estimator for hyperbolic location. IEEE Trans Signal Process. 1994;42(8):1905–15.10.1109/78.301830Search in Google Scholar
[15] Wang X, Wang ZX, O’Dea B. A TOA based location algorithm reducing the errors due to non-line-of-sight (NLOS) propagation. IEEE Trans Veh Technol. Jan. 2003;52(1):112–6.10.1109/TVT.2002.807158Search in Google Scholar
© 2023 the author(s), published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Research Articles
- The regularization of spectral methods for hyperbolic Volterra integrodifferential equations with fractional power elliptic operator
- Analytical and numerical study for the generalized q-deformed sinh-Gordon equation
- Dynamics and attitude control of space-based synthetic aperture radar
- A new optimal multistep optimal homotopy asymptotic method to solve nonlinear system of two biological species
- Dynamical aspects of transient electro-osmotic flow of Burgers' fluid with zeta potential in cylindrical tube
- Self-optimization examination system based on improved particle swarm optimization
- Overlapping grid SQLM for third-grade modified nanofluid flow deformed by porous stretchable/shrinkable Riga plate
- Research on indoor localization algorithm based on time unsynchronization
- Performance evaluation and optimization of fixture adapter for oil drilling top drives
- Nonlinear adaptive sliding mode control with application to quadcopters
- Numerical simulation of Burgers’ equations via quartic HB-spline DQM
- Bond performance between recycled concrete and steel bar after high temperature
- Deformable Laplace transform and its applications
- A comparative study for the numerical approximation of 1D and 2D hyperbolic telegraph equations with UAT and UAH tension B-spline DQM
- Numerical approximations of CNLS equations via UAH tension B-spline DQM
- Nonlinear numerical simulation of bond performance between recycled concrete and corroded steel bars
- An iterative approach using Sawi transform for fractional telegraph equation in diversified dimensions
- Investigation of magnetized convection for second-grade nanofluids via Prabhakar differentiation
- Influence of the blade size on the dynamic characteristic damage identification of wind turbine blades
- Cilia and electroosmosis induced double diffusive transport of hybrid nanofluids through microchannel and entropy analysis
- Semi-analytical approximation of time-fractional telegraph equation via natural transform in Caputo derivative
- Analytical solutions of fractional couple stress fluid flow for an engineering problem
- Simulations of fractional time-derivative against proportional time-delay for solving and investigating the generalized perturbed-KdV equation
- Pricing weather derivatives in an uncertain environment
- Variational principles for a double Rayleigh beam system undergoing vibrations and connected by a nonlinear Winkler–Pasternak elastic layer
- Novel soliton structures of truncated M-fractional (4+1)-dim Fokas wave model
- Safety decision analysis of collapse accident based on “accident tree–analytic hierarchy process”
- Derivation of septic B-spline function in n-dimensional to solve n-dimensional partial differential equations
- Development of a gray box system identification model to estimate the parameters affecting traffic accidents
- Homotopy analysis method for discrete quasi-reversibility mollification method of nonhomogeneous backward heat conduction problem
- New kink-periodic and convex–concave-periodic solutions to the modified regularized long wave equation by means of modified rational trigonometric–hyperbolic functions
- Explicit Chebyshev Petrov–Galerkin scheme for time-fractional fourth-order uniform Euler–Bernoulli pinned–pinned beam equation
- NASA DART mission: A preliminary mathematical dynamical model and its nonlinear circuit emulation
- Nonlinear dynamic responses of ballasted railway tracks using concrete sleepers incorporated with reinforced fibres and pre-treated crumb rubber
- Two-component excitation governance of giant wave clusters with the partially nonlocal nonlinearity
- Bifurcation analysis and control of the valve-controlled hydraulic cylinder system
- Engineering fault intelligent monitoring system based on Internet of Things and GIS
- Traveling wave solutions of the generalized scale-invariant analog of the KdV equation by tanh–coth method
- Electric vehicle wireless charging system for the foreign object detection with the inducted coil with magnetic field variation
- Dynamical structures of wave front to the fractional generalized equal width-Burgers model via two analytic schemes: Effects of parameters and fractionality
- Theoretical and numerical analysis of nonlinear Boussinesq equation under fractal fractional derivative
- Research on the artificial control method of the gas nuclei spectrum in the small-scale experimental pool under atmospheric pressure
- Mathematical analysis of the transmission dynamics of viral infection with effective control policies via fractional derivative
- On duality principles and related convex dual formulations suitable for local and global non-convex variational optimization
- Study on the breaking characteristics of glass-like brittle materials
- The construction and development of economic education model in universities based on the spatial Durbin model
- Homoclinic breather, periodic wave, lump solution, and M-shaped rational solutions for cold bosonic atoms in a zig-zag optical lattice
- Fractional insights into Zika virus transmission: Exploring preventive measures from a dynamical perspective
- Rapid Communication
- Influence of joint flexibility on buckling analysis of free–free beams
- Special Issue: Recent trends and emergence of technology in nonlinear engineering and its applications - Part II
- Research on optimization of crane fault predictive control system based on data mining
- Nonlinear computer image scene and target information extraction based on big data technology
- Nonlinear analysis and processing of software development data under Internet of things monitoring system
- Nonlinear remote monitoring system of manipulator based on network communication technology
- Nonlinear bridge deflection monitoring and prediction system based on network communication
- Cross-modal multi-label image classification modeling and recognition based on nonlinear
- Application of nonlinear clustering optimization algorithm in web data mining of cloud computing
- Optimization of information acquisition security of broadband carrier communication based on linear equation
- A review of tiger conservation studies using nonlinear trajectory: A telemetry data approach
- Multiwireless sensors for electrical measurement based on nonlinear improved data fusion algorithm
- Realization of optimization design of electromechanical integration PLC program system based on 3D model
- Research on nonlinear tracking and evaluation of sports 3D vision action
- Analysis of bridge vibration response for identification of bridge damage using BP neural network
- Numerical analysis of vibration response of elastic tube bundle of heat exchanger based on fluid structure coupling analysis
- Establishment of nonlinear network security situational awareness model based on random forest under the background of big data
- Research and implementation of non-linear management and monitoring system for classified information network
- Study of time-fractional delayed differential equations via new integral transform-based variation iteration technique
- Exhaustive study on post effect processing of 3D image based on nonlinear digital watermarking algorithm
- A versatile dynamic noise control framework based on computer simulation and modeling
- A novel hybrid ensemble convolutional neural network for face recognition by optimizing hyperparameters
- Numerical analysis of uneven settlement of highway subgrade based on nonlinear algorithm
- Experimental design and data analysis and optimization of mechanical condition diagnosis for transformer sets
- Special Issue: Reliable and Robust Fuzzy Logic Control System for Industry 4.0
- Framework for identifying network attacks through packet inspection using machine learning
- Convolutional neural network for UAV image processing and navigation in tree plantations based on deep learning
- Analysis of multimedia technology and mobile learning in English teaching in colleges and universities
- A deep learning-based mathematical modeling strategy for classifying musical genres in musical industry
- An effective framework to improve the managerial activities in global software development
- Simulation of three-dimensional temperature field in high-frequency welding based on nonlinear finite element method
- Multi-objective optimization model of transmission error of nonlinear dynamic load of double helical gears
- Fault diagnosis of electrical equipment based on virtual simulation technology
- Application of fractional-order nonlinear equations in coordinated control of multi-agent systems
- Research on railroad locomotive driving safety assistance technology based on electromechanical coupling analysis
- Risk assessment of computer network information using a proposed approach: Fuzzy hierarchical reasoning model based on scientific inversion parallel programming
- Special Issue: Dynamic Engineering and Control Methods for the Nonlinear Systems - Part I
- The application of iterative hard threshold algorithm based on nonlinear optimal compression sensing and electronic information technology in the field of automatic control
- Equilibrium stability of dynamic duopoly Cournot game under heterogeneous strategies, asymmetric information, and one-way R&D spillovers
- Mathematical prediction model construction of network packet loss rate and nonlinear mapping user experience under the Internet of Things
- Target recognition and detection system based on sensor and nonlinear machine vision fusion
- Risk analysis of bridge ship collision based on AIS data model and nonlinear finite element
- Video face target detection and tracking algorithm based on nonlinear sequence Monte Carlo filtering technique
- Adaptive fuzzy extended state observer for a class of nonlinear systems with output constraint
Articles in the same Issue
- Research Articles
- The regularization of spectral methods for hyperbolic Volterra integrodifferential equations with fractional power elliptic operator
- Analytical and numerical study for the generalized q-deformed sinh-Gordon equation
- Dynamics and attitude control of space-based synthetic aperture radar
- A new optimal multistep optimal homotopy asymptotic method to solve nonlinear system of two biological species
- Dynamical aspects of transient electro-osmotic flow of Burgers' fluid with zeta potential in cylindrical tube
- Self-optimization examination system based on improved particle swarm optimization
- Overlapping grid SQLM for third-grade modified nanofluid flow deformed by porous stretchable/shrinkable Riga plate
- Research on indoor localization algorithm based on time unsynchronization
- Performance evaluation and optimization of fixture adapter for oil drilling top drives
- Nonlinear adaptive sliding mode control with application to quadcopters
- Numerical simulation of Burgers’ equations via quartic HB-spline DQM
- Bond performance between recycled concrete and steel bar after high temperature
- Deformable Laplace transform and its applications
- A comparative study for the numerical approximation of 1D and 2D hyperbolic telegraph equations with UAT and UAH tension B-spline DQM
- Numerical approximations of CNLS equations via UAH tension B-spline DQM
- Nonlinear numerical simulation of bond performance between recycled concrete and corroded steel bars
- An iterative approach using Sawi transform for fractional telegraph equation in diversified dimensions
- Investigation of magnetized convection for second-grade nanofluids via Prabhakar differentiation
- Influence of the blade size on the dynamic characteristic damage identification of wind turbine blades
- Cilia and electroosmosis induced double diffusive transport of hybrid nanofluids through microchannel and entropy analysis
- Semi-analytical approximation of time-fractional telegraph equation via natural transform in Caputo derivative
- Analytical solutions of fractional couple stress fluid flow for an engineering problem
- Simulations of fractional time-derivative against proportional time-delay for solving and investigating the generalized perturbed-KdV equation
- Pricing weather derivatives in an uncertain environment
- Variational principles for a double Rayleigh beam system undergoing vibrations and connected by a nonlinear Winkler–Pasternak elastic layer
- Novel soliton structures of truncated M-fractional (4+1)-dim Fokas wave model
- Safety decision analysis of collapse accident based on “accident tree–analytic hierarchy process”
- Derivation of septic B-spline function in n-dimensional to solve n-dimensional partial differential equations
- Development of a gray box system identification model to estimate the parameters affecting traffic accidents
- Homotopy analysis method for discrete quasi-reversibility mollification method of nonhomogeneous backward heat conduction problem
- New kink-periodic and convex–concave-periodic solutions to the modified regularized long wave equation by means of modified rational trigonometric–hyperbolic functions
- Explicit Chebyshev Petrov–Galerkin scheme for time-fractional fourth-order uniform Euler–Bernoulli pinned–pinned beam equation
- NASA DART mission: A preliminary mathematical dynamical model and its nonlinear circuit emulation
- Nonlinear dynamic responses of ballasted railway tracks using concrete sleepers incorporated with reinforced fibres and pre-treated crumb rubber
- Two-component excitation governance of giant wave clusters with the partially nonlocal nonlinearity
- Bifurcation analysis and control of the valve-controlled hydraulic cylinder system
- Engineering fault intelligent monitoring system based on Internet of Things and GIS
- Traveling wave solutions of the generalized scale-invariant analog of the KdV equation by tanh–coth method
- Electric vehicle wireless charging system for the foreign object detection with the inducted coil with magnetic field variation
- Dynamical structures of wave front to the fractional generalized equal width-Burgers model via two analytic schemes: Effects of parameters and fractionality
- Theoretical and numerical analysis of nonlinear Boussinesq equation under fractal fractional derivative
- Research on the artificial control method of the gas nuclei spectrum in the small-scale experimental pool under atmospheric pressure
- Mathematical analysis of the transmission dynamics of viral infection with effective control policies via fractional derivative
- On duality principles and related convex dual formulations suitable for local and global non-convex variational optimization
- Study on the breaking characteristics of glass-like brittle materials
- The construction and development of economic education model in universities based on the spatial Durbin model
- Homoclinic breather, periodic wave, lump solution, and M-shaped rational solutions for cold bosonic atoms in a zig-zag optical lattice
- Fractional insights into Zika virus transmission: Exploring preventive measures from a dynamical perspective
- Rapid Communication
- Influence of joint flexibility on buckling analysis of free–free beams
- Special Issue: Recent trends and emergence of technology in nonlinear engineering and its applications - Part II
- Research on optimization of crane fault predictive control system based on data mining
- Nonlinear computer image scene and target information extraction based on big data technology
- Nonlinear analysis and processing of software development data under Internet of things monitoring system
- Nonlinear remote monitoring system of manipulator based on network communication technology
- Nonlinear bridge deflection monitoring and prediction system based on network communication
- Cross-modal multi-label image classification modeling and recognition based on nonlinear
- Application of nonlinear clustering optimization algorithm in web data mining of cloud computing
- Optimization of information acquisition security of broadband carrier communication based on linear equation
- A review of tiger conservation studies using nonlinear trajectory: A telemetry data approach
- Multiwireless sensors for electrical measurement based on nonlinear improved data fusion algorithm
- Realization of optimization design of electromechanical integration PLC program system based on 3D model
- Research on nonlinear tracking and evaluation of sports 3D vision action
- Analysis of bridge vibration response for identification of bridge damage using BP neural network
- Numerical analysis of vibration response of elastic tube bundle of heat exchanger based on fluid structure coupling analysis
- Establishment of nonlinear network security situational awareness model based on random forest under the background of big data
- Research and implementation of non-linear management and monitoring system for classified information network
- Study of time-fractional delayed differential equations via new integral transform-based variation iteration technique
- Exhaustive study on post effect processing of 3D image based on nonlinear digital watermarking algorithm
- A versatile dynamic noise control framework based on computer simulation and modeling
- A novel hybrid ensemble convolutional neural network for face recognition by optimizing hyperparameters
- Numerical analysis of uneven settlement of highway subgrade based on nonlinear algorithm
- Experimental design and data analysis and optimization of mechanical condition diagnosis for transformer sets
- Special Issue: Reliable and Robust Fuzzy Logic Control System for Industry 4.0
- Framework for identifying network attacks through packet inspection using machine learning
- Convolutional neural network for UAV image processing and navigation in tree plantations based on deep learning
- Analysis of multimedia technology and mobile learning in English teaching in colleges and universities
- A deep learning-based mathematical modeling strategy for classifying musical genres in musical industry
- An effective framework to improve the managerial activities in global software development
- Simulation of three-dimensional temperature field in high-frequency welding based on nonlinear finite element method
- Multi-objective optimization model of transmission error of nonlinear dynamic load of double helical gears
- Fault diagnosis of electrical equipment based on virtual simulation technology
- Application of fractional-order nonlinear equations in coordinated control of multi-agent systems
- Research on railroad locomotive driving safety assistance technology based on electromechanical coupling analysis
- Risk assessment of computer network information using a proposed approach: Fuzzy hierarchical reasoning model based on scientific inversion parallel programming
- Special Issue: Dynamic Engineering and Control Methods for the Nonlinear Systems - Part I
- The application of iterative hard threshold algorithm based on nonlinear optimal compression sensing and electronic information technology in the field of automatic control
- Equilibrium stability of dynamic duopoly Cournot game under heterogeneous strategies, asymmetric information, and one-way R&D spillovers
- Mathematical prediction model construction of network packet loss rate and nonlinear mapping user experience under the Internet of Things
- Target recognition and detection system based on sensor and nonlinear machine vision fusion
- Risk analysis of bridge ship collision based on AIS data model and nonlinear finite element
- Video face target detection and tracking algorithm based on nonlinear sequence Monte Carlo filtering technique
- Adaptive fuzzy extended state observer for a class of nonlinear systems with output constraint