Fixed point and multidimensional fixed point theorems with applications to nonlinear matrix equations in terms of weak altering distance functions
-
Kanokwan Sawangsup
 and
Wutiphol Sintunavarat
and
Wutiphol Sintunavarat

Abstract
The aim of this work is to introduce the notion of weak altering distance functions and prove new fixed point theorems in metric spaces endowed with a transitive binary relation by using weak altering distance functions. We give some examples which support our main results where previous results in literature are not applicable. Then the main results of the paper are applied to the multidimensional fixed point results. As an application, we apply our main results to study a nonlinear matrix equation. Finally, as numerical experiments, we approximate the definite solution of a nonlinear matrix equation using MATLAB.
1 Introduction
The classical Banach contraction principle is one of the essential results of analysis. In the recent years, many authors extended fixed point results for weak contractions and generalized contractions, which are generalizations of Banach contraction mapping principle to partially ordered metric spaces (see [1-15]). Some of the above results involve altering distance functions presented by Khan et al. in [16].
Now, we recall the definition of an altering distance function.
Definition 1.1
([16]). A function ψ : [0, ∞) → [0, ∞) is said to be an altering distance function if it satisfies the following conditions:
ψ is continuous and nondecreasing;
ψ(t)= 0 if and only if t = 0.
Example 1.2
Define ψ1, ψ2, ψ3, ψ4:[0, ∞) → [0, ∞) by ψ1(t) = t, ψ2(t) = t2, ψ3(t) = tet, ψ4(t) = ln(l+t) for all t ≥ 0. We see that ψ1, ψ2, ψ3, and ψ4 are altering distance functions because ψ1, ψ2, ψ3, and ψ4 are continuous and nondecreasing.
Moreover, ψi (t) = 0 if and only if t = 0 for all i = 1,2,3, 4. (The graphs of functions ψ1, ψ2, ψ3, and ψ4 show in Figure 1).
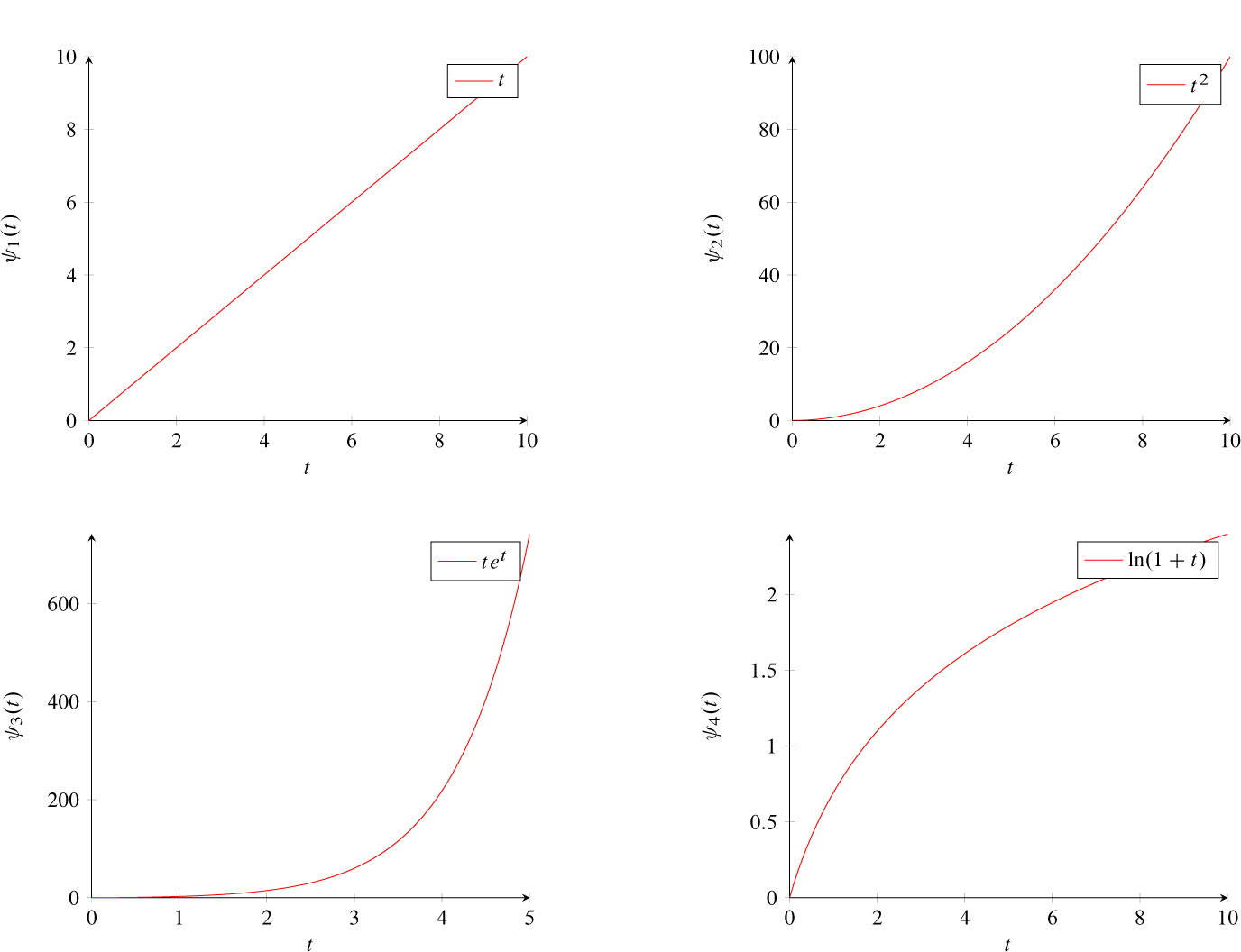
Graphs ψ1, ψ2, ψ3, ψ4 in Example 1.2.
In 2012, Yan et al. [17] discussed some results on existence and uniqueness of a fixed point in partially ordered metric spaces by using the concept of an altering distance function as follows.
Theorem 1.3
([17]). Let (X, ⪯) be a partially ordered set and suppose that there exists a metric d in X such that (X, d) is a complete metric space. Suppose that Τ : X → X is a continuous and nondecreasing mapping such that
where ψ is an altering distance function and φ : [0, ∞) → [0, ∞) is a continuous function with the condition: ψ(t) > φ(t) for all t > 0. If there exists x0∈ X such that x0⪯ Tx0, then Τ has a fixed point.
On the other hand, the notion of a coupled fixed point was firstly investigated by Guo and Lakshmikantham in [18]. In 2006, Bhaskar and Lakshmikantham [19] were the first to introduce the notion of mixed monotone property in partially ordered metric spaces. They also established the classical coupled fixed point theorems for mappings by using this property under contractive type conditions. Due to the important role of such results for the investigation of solutions of nonlinear differential and integral equations, several authors have studied various generalizations of these results. In this continuation, several authors introduced concepts of a tripled fixed point, quadruple fixed point and multidimensional fixed point. They also proved new results on the existence and uniqueness of multidimensional fixed points that were presented in partially ordered metric spaces and another spaces. For instance, Rus [20] obtained the existence and uniqueness results for a multidimensional fixed point of nonlinear mappings satisfying the contractive condition with a control function in the following class:
together with an approximating iterative scheme, in the setting of partially ordered metric spaces.
In 2015, Soleimani Rad et al. [21] compared relation between multidimensional fixed point results and fixed point theorems concerning various contractive conditions which are depended on contractive constants in abstract metric spaces and metric-like spaces. Also, they claimed that these results are true for another spaces with several contractive conditions. Recently, Su et al. [22] have discussed the existence and uniqueness results for multidimensional fixed point of contraction mappings involving some control functions in complete metric spaces.
In this paper, we present a new concept of weak altering distance function and establish fixed point theorems for generalized contraction mappings in complete metric spaces endowed with a transitive relation by using the idea of a weak altering distance function. Also, we provide an example that supports our main result where previous results in literature are not applicable. Our results generalize and improve the main result of Yan et al. [17] and several well-known results given by some authors in partially metric spaces. Moreover, we present a new extension of multidimensional fixed point theorems in metric spaces endowed with a transitive relation. Furthermore, we apply our results to prove the existence and uniqueness of a solution of nonlinear matrix equations. Finally, we use some numerical examples to show the iterative method is feasible to confirm the existence and uniqueness of positive definite solution of a nonlinear matrix equation.
2 Preliminaries
We start our consideration by giving a brief review of the definitions and basic properties in this work. Henceforth, Χ, ℕ and ℕ0 denote a nonempty set, the set of positive integers and nonnegative integers, respectively, and Ν denotes a positive integer. Throughout this paper, unless otherwise specified, ℜ denotes a binary relation on X and ℜN denotes a binary relation on the N-fold Cartesian product XN which is defined by
Definition 2.1
([23]). Let X be a nonempty set and Τ : XN → X be a given mapping. An element (x1, x2, . . ., xn)∈ XN is said to be a fixed point of Ν-order of the mapping Τ if
Definition 2.2
([24]). Let X be a nonempty set. A subset ℜ of X2 is called a binary relation on X. Notice that for each pair x, y ∈ X, one of the following conditions holds:
(x, y)∈ ℜ, which amounts to saying that “x is ℜ-related to y” or “x relates to y under ℜ.” Sometimes, we write xℜy instead of (x, y)∈ ℜ;
(x, y)∈ℜ which means that “x is not ℜ-related to y” or “x does not relate to y under ℜ.”
Definition 2.3
A binary relation ℜ defined on a nonempty set X is called transitive if (x, y)∈ ℜ and (y, z)∈ ℜ implies (x, z) ∈ ℜ.
Definition 2.4
([25]). Let ℜ be a binary relation defined on a nonempty set X and x, y ∈ X. We say that x and y are ℜ-comparative if either (x, y)∈ ℜ or (y, x) ∈ ℜ. We denote it by [x, y]∈ ℜ.
Definition 2.5
([25]). Let X be a nonempty set and Τ be a self-mapping on X. A binary relation ℜ defined on X is called Τ-closed if for any x, y ∈ X, (x, y)∈ ℜ ⇒ (Tx, Ty)∈ ℜ.
Definition 2.6
([25]). Let X be a nonempty set and ℜ be a binary relation on X. A sequence {xn}⊂ X is called ℜ-preserving if
Definition 2.7
([25]). Let (X, d) be a metric space. A binary relation ℜ defined on X is called d-self-closed if whenever {xn} is an ℜ-preserving sequence and
then there exists a subsequence {xnk} of {xn} with
Definition 2.8
([26]). Let X be a nonempty set and ℜ a binary relation on X. A subset E of X is called ℜ-directed if for each x, y ∈ E, there exists z ∈ X such that (x, z) ∈ ℜ and (y, z)∈ ℜ.
In this paper, we use the following notations for a binary relation ℜ on a nonempty set X:
where Τ : X → X is a given mapping.
3 Main results
We first give the definition of a weak altering distance function as follows:
Definition 3.1
A function ψ : [0, ∞) → [0, ∞) is said to be a weak altering distance function if it satisfies the following conditions:
ψ is lower semicontinuous and nondecreasing;
ψ(t) = 0 if and only if t = 0.
Every continuous function is lower semicontinuous and so the class of weak altering distance functions is larger than the class of altering distance functions. In general, a weak altering distance function need not necessarily be an altering distance function. Next, we give some examples of the weak altering distance functions which show that the weak altering distance functions are real generalization of altering distance functions.
Example 3.2
Define ψ1, ψ2, ψ3: [0, ∞) → [0, ∞) by
We see that ψ1, ψ2 and ψ3 are weak altering distance functions because ψ1, ψ2 and ψ3 are lower semicontinuous and nondecreasing. Moreover, ψi(t) = 0 if and only if t = 0 for all i = 1,2,3. (The graphs of functions ψ1, ψ2 and ψ3 show in Figure 2).
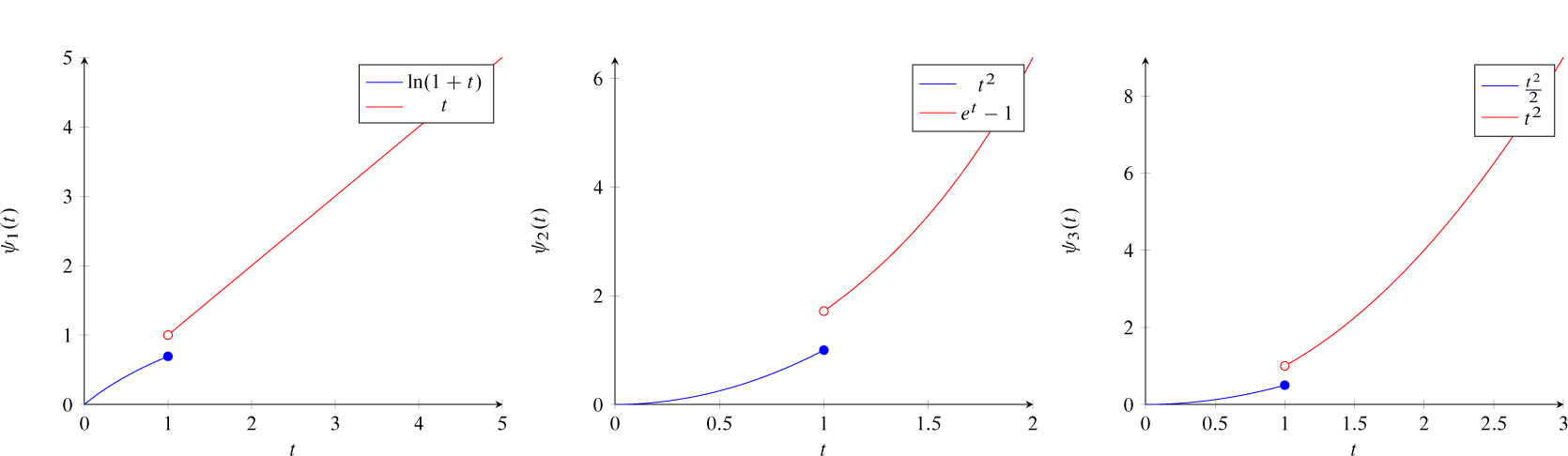
Graphs of ψ1, ψ2, ψ3in Example 3.2.
Now we give an useful proposition concerning a contractive condition given for comparable elements with respect to a binary relation.
Proposition 3.3
If (X, d) is a metric space, ℜ is a binary relation on Χ, Τ is a self-mapping on Χ, ψ is a weak altering distance function and φ : [0, ∞) → [0, ∞) is a right upper semicontinuous function, then the following contractivity conditions are equivalent:
ψ(d(Tx, Ty)) ≤ φ(d(x, y)), ∀x, y ∈ X with (x, y)∈ ℜ,
ψ(d(Tx, Ty)) ≤ φ(d(x, y)), ∀x, y ∈ X with [x, y] ∈ ℜ.
Proof
First, we will show that the implication (i)⇒(ii) holds.
Assume that (i) holds. Take x, y ∈ X with [x, y]∈ℜ. If (x, y)∈ℜ, then (ii) directly follows from (i). Now, suppose that (y, x)∈ℜ, then using the symmetry of d and (i), we get
This shows that (i)⇒(ii).
Conversely, the implication (ii)⇒(i) is trivial. This completes the proof.
Theorem 3.4
Let (X, d) be a complete metric space and ℜ be a transitive relation on X. Suppose that Τ : X → X is a continuous mappings and ℜ is Τ -closed such that
where ψ is a weak altering distance function and φ : [0, ∞) → [0, ∞) is a right upper semicontinuous function such that ψ(t) > φ(t) for all t > 0. If X(T; ℜ) is a nonempty set, then Τ has a fixed point.
Proof
Let x0 be an arbitrary point in X(T;ℜ). Put xn = Txn-1 = Tnx0for all n ∈ℕ. If xn* = χn* + 1for some n* ∈ℕ0, then xn*is a fixed point of Τ. Thus we will assume that xn ≠ xn+1for all n ∈ ℕ0. Since (x0, Tx0)∈ℜ, using the T-closedness of ℜ, we get
and so (xn, xn+1) ∈ ℜ for all n ∈ ℕ0. Thus the sequence {xn}is ℜ-preserving. From contractive condition (1), we have
for all n ∈ℕ. Since ψ is a nondecreasing function, we have
for all n ∈ ℕ. Thus, the sequence {d{xn, xn+1)} is decreasing and bounded below. Consequently, there exists s ≥ 0 such that
From (3), letting n → ∞ and using the property of ψ and φ we get
Since ψ(t) > φ(t) for all t > 0, we have 5=0 and so {d{xn, xn+1)} converges to 0. Now, we will show that {xn} is a Cauchy sequence.
Assume on the contrary, there is an ϵ > 0 and subsequences
Choosing nk to be the smallest integer exceeding mk for which (5) holds, we obtain that
Using (5) and (6), we get
Hence, d(xmk, xnk)→ ∊as k→∞. Furthermore, we have
and
Letting k→ ∞ in (7) and (8) and using the fact that
Since nk > mk and ℜ is a transitive relation, we get (xmk−1, xnk–1)∈ℜ. This implies that
From (9), letting k→∞ and using the property of ψ and ϕ we get
It yields that ∊ = 0, which is a contradiction. Therefore, {xn} is a Cauchy sequence.
Since (X, d) is a complete metric space, there exists x* ∈ X such that xn→ x* as n→ ∞. Thus, by the continuity of T, we get Tx* = x*.This completes the proof.
Remark 3.5
It is fascinating to point out that we use the result in Theorem 3.4 to derive a criterion for the existence of fixed points in some cases wherein several results contained in [17, 20-22] cannot guarantee the existence of fixed points. Indeed, the main results of Yan et al. in [17] (Theorem 1.3) are not applicable in the following cases:
(X,⪯) is not a partially ordered set;
ψ is not an altering distance function;
φ is not continuous, the main results of Rus in [20] are not applicable in the following cases:
(X,⪯) is not a partially ordered set (or quasi-ordered set);
Τ does not satisfy the contractive condition with the control function φ ∈ Φ, the main results of Soleimani Rad et al. in [21] are not applicable in the following cases:
Τ does not satisfy the contractive condition with several contractive constant, the main results of Su et al. in [22] are not applicable in the following cases:
Τ does not satisfy the contractive condition in metric space without the transitive relation;
Τ does not satisfy the contractive condition with two control functions ψ and φ (see the detail in [22]).
Now, we give an example to illustrate utility of Theorem 3.4.
Example 3.6
Let X = [0, ∞) with usual metric d. Thus (X, d) is a complete metric space. Define a binary relationℜ on X by
It is easy to prove that ℜ is a transitive relation on X. Also, we define two functions ϕ, ψ: [0, ∞) → [0, ∞) by
and
Let Τ: X→ X be defined by
for all x ∈ X. Then Τ is continuous.
Next, we will show that ℜ is Τ-closed. Assume that x, y ∈ X such that (x, y) ∈ ℜ and then ln(x2 + 2x +1) = ln(y2 + 2y +1). This means that Τx = Ty and so (Tx)2 + TT χ = (Ty)2 + 2 Ty. This implies that (Tx, Ty) ∈ ℜ. Therefore, ℜ is Τ-closed. Moreover, there exists0 e X such that (0, T0) ∈ ℜ. This shows that X(T; ℜ) is a nonempty set.
Finally, it is clear that for each x, y e X with (x, y) ∈ ℜ, we get
So Τ satisfies the contractive condition (1).
Now all of the conditions in Theorem 3.4 hold and hence Τ has at least one fixed point. For instance, the point x =0 is one of the fixed point of T.
Remark 3.7
We note that Yan et al.’s result in [17] (Theorem 1.3) is not applicable in the above example since ψ is not an altering distance function. This implies that the Banach contraction principle is not also applicable in the above example.
The following theorem guarantees the uniqueness of fixed point in Theorem 3.4.
Theorem 3.8
In addition to the hypothesis of Theorem 3.4, suppose that ϕ (0)= 0 and X is ℜ-directed. Then Τ has a unique fixed point.
Proof. Suppose that there exist x*, y* ∈ X which are fixed points. We distinguish two cases.
Case 1. If (x*, y*) ∈ ℜ, then (Tn x*, Tn y*) ∈ ℜ for all n ∈ ℕ0. It yields that
for all n ∈ ℕ. From the fact that ψ(t) > ϕ (t) for all t > 0, we get d(x*, y*) = 0. Therefore, x* = y*.
Case 2. If (x*, y*) ∉ ℜ, then there exists z*∈ X such that (x*, z*) ∈ ℜ and (y*, z*) ∈ ℜ. Since ℜ is T-closed, we get (Tnx*, Tn z*)∈ ℜ and (Tn y*, Tn z*)∈ ℜ for all n ∈ ℕ0. Moreover, we have
for all n ∈ ℕ.Since ψ is a nondecreasing function, we have
for all n ∈ ℕ.Thus, the sequence {d(x*, Tn z*)}is non-increasing. Thus, there exists ξ such that
From (10), letting n → ∞ and using the property of ψ and ϕ we get
From (12) and the condition: ψ(t) > ϕ(t) for all t > 0, it implies that ξ = 0. Similarly, we can show that
Therefore, Tn z*→ x* and Tn z*→ y* as n → ∞. This implies that x* = y *.This completes the proof.
Now we use the following notation for a binary relation ℜ on a nonempty set X for all Ν ∈ ℕ,
where Τ : XN→ Χ is a given mapping.
Definition 3.9
([27]). Let X be a nonempty set. Given Ν ∈ ℕ and Τ: Χ N → Χ is a mapping. A binary relation ℜ defined on X is called ΤN -closed if for any (x1, x2,. . ., xN), (y1. y2, . . ., yN) ∈ XN
Definition 3.10
Let X be a nonempty set and ℜ a binary relation on X. Given Ν ∈ ℕ. A subset EN of X N is called ℜN -directed if for each(x1, x2, . . ., xN) (y1, x2, . . ., yN) ∈ EN, there exists(z1, z2, . . ., zN) ∈ X suchthat
and
Next, we illustrate how to prove multidimensional results from the unidimensional result by involving simple tools. Given Ν ∈ ℕ and a mapping Τ : XN→ X, let us denote by
The following lemmas will be useful later.
Lemma 3.11
([27]). Given Ν ∈ ℕ, Τ : ΧΝ → Χ, a point (x1, x2, . . ., xN) ∈ ΧΝ is a fixed point of Ν-order of mapping Τ if and only if it is a fixed point of
Lemma 3.12
([27]). Given Ν ∈ ℕ, Τ : ΧΝ→ Χ and
Lemma 3.13
([27]). Given Ν ∈ Ν, Τ : ΧΝ→ Χ and
Lemma 3.14
([27]). Given Ν ∈ ℕ. Let(X, d) be a metric space and a mapping DN : XN× XN → ℝ defined by
for all A =(a1, a2,..., aN), Β = (b1, b2, ...bN) ∈ XN . Then the following properties hold.
(XN , DN) is also a metric space.
Let
If
(X, d) is complete if and only if (XN,DN) is complete.
Here, we show how to use Theorem 3.4 in order to deduce multidimensional fixed point results.
Theorem 3.15
Let (X, d) be a complete metric space and ℜ be a transitive relation on X. Given Ν ∈ ℕ. Suppose that Τ: XN → X is a continuous and ℜ is TN-closed such that for each (x1, x2,..., xN), (y1, y2, …, yN) ∈ XN with((x1, x2,..., xN), (y1, y2,..., yN) ∈ ℜN,
where ψ is a weak altering distance function and ϕ: [0, ∞) → [0, ∞) is a right upper semicontinuous function such that ψ(t) > ϕ (t) for all t > 0. If ΧN (Τ; ℜ) is a nonempty set, then Τ has a fixed point of Ν-order.
Proof.Using items 1 and 4 of Lemma 3.14, we obtain that (XN, DN) is a complete metric space. By Lemma 3.12, a binary relation ℜN defined on XN is
Now, let A = (a1,a2,...,aN),B = (b1, b2 ,...,bN) ∈ XN such that (A, B) ∈ ℜΝ. Then
Applying Theorem 3.4, there exists X̂ = (x̂1,x̂2, . . ., .....x̂) ∈ XN such that
By using Theorem 3.8, we get the following uniqueness result of fixed point of N-order.
Theorem 3.16
In addition to the hypothesis of Theorem 3.15, suppose that ϕ(0) = 0 and XN is ℜN -directed. Then Τ has a unique fixed point of Ν -order.
4 Applications
In this section, we will use the following notations:
M(n) denotes the set of all n × n complex matrices;
Η (n)⊂ M(n) is the set of all n × n Hermitian matrices;
P(n) ⊂ H(n) is the set of all n × n positive definite matrices;
H + {n) ⊂ Η (η) is the set of all n × n positive semidefinite matrices.
Furthermore, we will use the following notations for Χ, Υ ∊ Μ(n):
X ≻ 0 ⊜ Χ ∈ Ρ (η);
X ⪰ ⊜ Χ ∈ H+ (n);
Χ – Υ ≻ 0 ⊜ X ≻ Υ;
Χ – Υ ⪰ 0 ⊜ X⪰ Υ.
It is well-known that for each Χ, Υ ∈ H(n), there is the greatest lower bound and the least upper bound.
We use the symbol || · || which stands for the spectral norm of a matrix A unless and until it is stated, i.e.,
where λ+(Α* A) is the largest eigenvalue of A* A and A* is the conjugate transpose of A.
In the sequel, we use the metric induced by the trace norm || · ||tr defined by
In 2003, Ran and Reurings [28] discussed an analogue of Banach contraction mapping principle in partially ordered sets and applied this result to linear and nonlinear matrix equations. Later, Petruşel and Rus [31] presented fixed point results in ordered L-spaces and applied it to nonlinear matrix equations which are generalization and extension of Ran and Reurings [28].
Inspired by the work mentioned above and the basis of the fixed point results in previous section, we investigate the nonlinear matrix equation
where Ai is an arbitrary n × n matrices, Q is a Hermitian positive definite matrix and 𝓖 is continuous order preserving maps from H(n) into P(n) such that 𝓖(0) =0. The following lemmas will be useful later.
Lemma 4.2
([32]). If A ∈ Η (n) and A≺ I, then ||A||<1.
Theorem 4.3
Consider the matrix equation (13). Assume that there is a positive number M such that:
(i) for every X, Y ∈ H(n) such that (X, Y) ∈ ⪯, we have
where h: [0, ∞) → [0, →) is a right upper semicontinuous function with h(t) < t2 for all t > 0;
If
where X0∈ H(n) such that
Proof. Throughout this proof, we define the mapping 𝓕 : H(n) → H(n) by
Then 𝓕 is well defined and ⪯on H(n) is 𝓕-closed and a fixed point of 𝓕 is a solution of equation (13). 1 𝓖 is order preserving if A, B ∈ Η (n) with A ⪯ Β implies that 𝓖(A) ⪯ (B).
Next, we will show that the contractive condition (1) holds with 𝓕.
Let X, Y ∈ Η (n) such that (X, Y) ∈⪯. This mean that Χ ⪯ Y and then 𝓖(Χ)⪯𝓖(Y). Therefore,
This yields that,
Putting ψ(t)= t2 and ϕ(t) = h(t), obviously ψ is a weak altering distance function and φ is a right upper semicontinuous function such that ψ(t) > ϕ(t) for all t > 0.
From the inequality (16), we have
Thus, the contractive condition (1) in Theorem 3.4 is satisfied for all X, Y ∈ H(n) such that (X, Y) ∈⪯. From
Theorem 4.4
Consider the matrix equation (13). Assume that there is a positive number M such that:
for every X, Y ∈ Η (n) such that (X, Y) ∈ ⪯, we have
where h : [0, ∞) → [0, ∞) is a right upper semicontinuous function with h(t) < et — 1, for all t > 0;
- (17)
where X0 ∈ Η (n) such that
Proof
Throughout this proof, we define the mapping 𝓕 : Η (n) → H(n) by
Then 𝓕 is well defined and ⪯on H(n) is 𝓕-closed and a fixed point of 𝓕 is a solution of equation (13).
Next, we will show that the contractive condition (1) holds with 𝓕.
Let X, Y ∈ Η (n) such that (X, Y)∈⪯. This mean that Χ ⪯ Y and then 𝓖(X)⪯ 𝓖(Y). Using the same technique to Theorem 4.3, we get
Putting ψ(t) = t, ϕ(t) = ln(l + h(t)), obviously ψ is a weak altering distance function and ϕ is a right upper semicontinuous function such that ψ(t) > ϕ(t) for all t > 0. From the inequality (19), we have
Thus, the contractive condition (1) in Theorem 3.4 is satisfied for all X, Y ∈ H(n) such that (X, Y)∈⪯. From
Theorem 4.5
In addition to the hypothesis of Theorem 4.3 (resp. Theorem 4.4), suppose that h(0) = 0. Then the equation (13) has a unique solution X̂ ∈ H(n).
Proof
It follows from h(0) = 0 that ϕ (0) = 0. Since for every X, Y ∈ Η (n) there is the greatest lower bound and the least upper bound, we obtain that H(n) is ⪯ directed. Thus, we deduce from Theorem 3.8 that 𝓕 has a unique fixed point in H(n). This implies that Equation (13) has a unique solution in H(n).
5 Numerical experiments
Next, we use some numerical examples to confirm the correctness of Theorem 4.5.
Example 5.1
Let
Define h : [0, ∞) → [0, ∞) by
All the hypotheses of Theorem 4.5 are satisfied with
where X0 = Q, and the error En := ||Xn – Xn—1||tr · After 8 iterations, we can approximate a solution X̂ of Equation (20) by
with E8 = 2.3565e – 05.
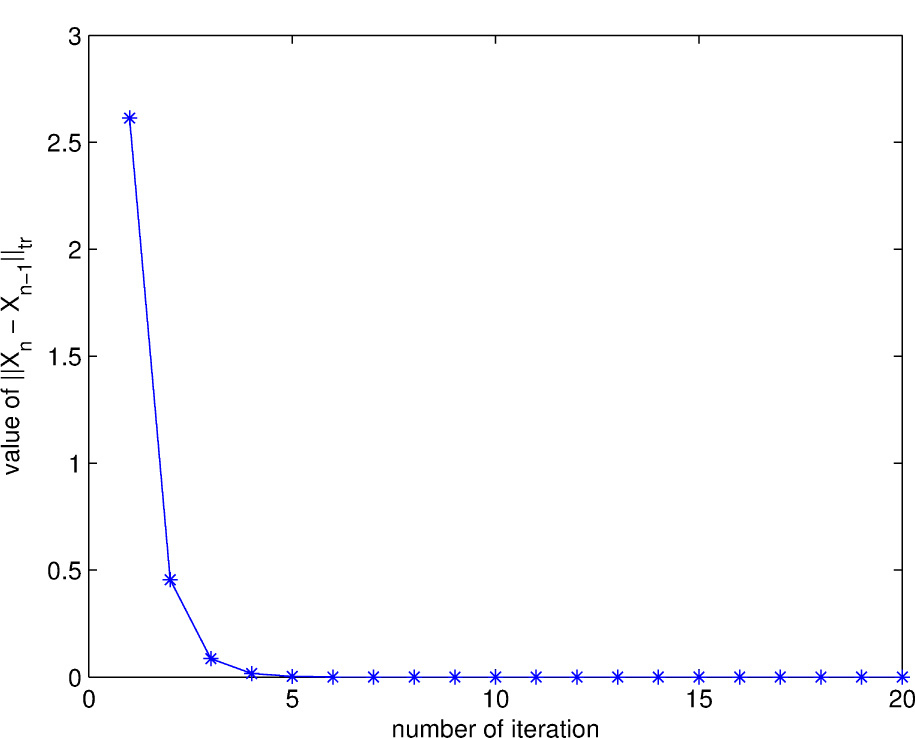
The error of iteration process 21 for the Equation (20) given in Example 5.1.
Example 5.2
Let
Define h : [0, ∞) ∞ [0, ∞) by
All the hypotheses of Theorem 4.5 are satisfied with
where X0= Q, and the error En := ||Xn – Xn–1||tr. After 7 iterations, we can approximate a solution X̂ of Equation (20) by
with Ε7 = 2.3990e – 004.
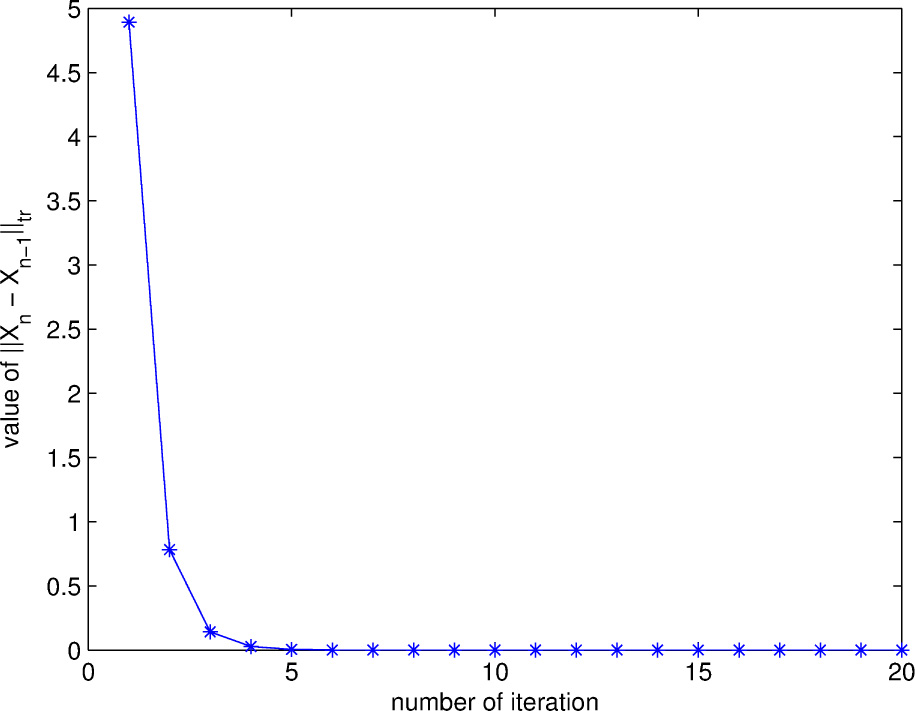
The error of iteration process 23 for the Equation (20) given in Example 5.2.
-
Competing interests
The authors declare that they have no competing interests.
-
Authors’ contributions
All authors contributed equally and significantly in writing this paper. All authors read and approved the final manuscript.
Acknowledgement
The authors gratefully acknowledge the financial support provided by Thammasat University Research Fund under the TU Research Scholar, Contract No. 2/11/2559.
References
[1] Dhutta P., Choudhury B., A generalization of contractions in partially ordered metric spaces, Appl. Anal., 2008, 87, 109-11610.1080/00036810701556151Search in Google Scholar
[2] Sastry K.P.R., Babu G.V.R., Some fixed point theorems by altering distance between the points, Indian J. Pure Appl. Math., 1999, 30, 641-647Search in Google Scholar
[3] Amini-Harandi A., Emami H., A fixed point theorem for contraction type maps in partially ordered metric spaces and application to ordinary differential equations, Nonlinear Anal., 2010, 72, 2238-224210.1016/j.na.2009.10.023Search in Google Scholar
[4] Harjani J., Sadarangni K., Fixed point theorems for weakly contraction mappings in partially ordered sets, Nonlinear Anal., 2009, 71, 3403-341010.1016/j.na.2009.01.240Search in Google Scholar
[5] Burgic D., Kalabus̃ić S., Kulenović M., Global attractivity results for mixed monotone mappings in partially ordered complete metric spaces, Fixed Point Theory Appl., 2009, 2009, Article ID 76247810.1155/2009/762478Search in Google Scholar
[6] Cirić L., Cakić N., Rajović M., Urna J., Monotone generalized nonlinear contractions in partially ordered metric spaces, Fixed Point Theory Appl., 2008, 2008, Article ID 13129410.1155/2008/131294Search in Google Scholar
[7] Bhaskar T. G., Lakshmikantham V., Fixed point theorems in partially ordered metric spaces and applications, Nonlinear Anal., 2006, 65, 1379-139310.1016/j.na.2005.10.017Search in Google Scholar
[8] Lakshmikantham V., Cirić L., Coupled fixed point theorems for nonlinear contractions in partially ordered metric spaces, Nonlinear Anal., 2009, 70, 4341-434910.1016/j.na.2008.09.020Search in Google Scholar
[9] Nieto JJ., Rodriguez-López R., Contractive mapping theorems in partially ordered sets and applications to ordinary differential equations, Order., 2005, 22, 223-23910.1007/s11083-005-9018-5Search in Google Scholar
[10] Nieto JJ., Rodriguez-López R., Existence and uniqueness of fixed point in partially ordered sets and applications to ordinary differential equations, Acta Math. Sin., 2007, 23, 2205-221210.1007/s10114-005-0769-0Search in Google Scholar
[11] O’Regan D., Petrusel A., Fixed point theorems for generalized contractions in ordered metric spaces, J. Math. Anal. Appl., 2008, 341, 1241-125210.1016/j.jmaa.2007.11.026Search in Google Scholar
[12] Shatanawi W., Postolache M., Common fixed point theorems for dominating and weak annihilator mappings in ordered metric spaces, Fixed Point Theory Appl., 2013, 2013, Article ID 27110.1186/1687-1812-2013-271Search in Google Scholar
[13] Shatanawi W., Postolache M., Common fixed point results of mappings for nonlinear contraction of cyclic form in ordered metric spaces, Fixed Point Theory Appl., 2013, 2013, Article ID 6010.1186/1687-1812-2013-60Search in Google Scholar
[14] E. Karapinar, W. Shatanawi, Z. Mustafa, Quadruple fixed point theorems under nonlinear contractive conditions in partially ordered metric spaces. J. Appl. Math., 2012, 2012, Article ID 95191210.1155/2012/951912Search in Google Scholar
[15] Shatanawi W., Some fixed point results for a generalized-weak contraction mappings in orbitally metric spaces, Chaos Solitons Fractals, 2012, 45, 520-52610.1016/j.chaos.2012.01.015Search in Google Scholar
[16] Khan MS., Swaleh M., Sessa S., Fixed point Theorems by altering distances between the points, Bull. Aust. Math. Soc, 1984, 30 (1), 1-910.1017/S0004972700001659Search in Google Scholar
[17] Yan F., Su Y., Feng Q., A new contraction mapping principle in partially ordered metric spaces and applications to ordinary differenctial equations, Fixed point Theory Appl., 2012, Article ID 15210.1186/1687-1812-2012-152Search in Google Scholar
[18] Guo D., Lakshmikantham V., Coupled fixed points of nonlinear operators with applications, Nonlinear Anal., 1987, 11, 623-63210.1016/0362-546X(87)90077-0Search in Google Scholar
[19] Bhaskar T.G., Lakshmikantham V., Fixed point theorems in partially ordered metric spaces and applications. Nonlinear Anal., 2006, 65, 1379-139310.1016/j.na.2005.10.017Search in Google Scholar
[20] Rus M.-D., The fixed point problem for systems of coordinate-wise uniformly monotone operators and applications, Mediterr. J. Math., 2014, 11, 109-12210.1007/s00009-013-0306-9Search in Google Scholar
[21] Soleimani Rad G., Shukla S., Rahimi H., Some relations between n-tuple fixed point and fixed point results, Revista de la Real Academia de Ciencias Exactas, Físicas y Naturales, Serie A, Matematicas September 2015, Volume 109, Issue 2, pp 471-48110.1007/s13398-014-0196-0Search in Google Scholar
[22] Su Y., Petrusel A., Yao J.-C., Multivariate fixed point theorems for contractions and nonexpansive mappings with applications, Fixed Point Theory Appl., 2016, 2016:9, 19 pp10.1186/s13663-015-0493-0Search in Google Scholar
[23] Samet B., Vetro C, Coupled fixed point, f-invariant set and fixed point of N-order, Ann. Funct. Anal., 2010, 1(2), 46-5610.15352/afa/1399900586Search in Google Scholar
[24] Lipschutz S., Schaum’s Outlines of Theory and Problems of Set Theory and Related Topics, McGraw-Hill, New York, 1964Search in Google Scholar
[25] Alam A., Imdad M., Relation-theoretic contraction principle, Fixed point Theory Appl., 2015, DOI:10.1007/s11784-015-0247-y, 10 ppSearch in Google Scholar
[26] Samet B., Turinici M., Fixed point theorems on a metric space endowed with an arbitrary binary relation and applications, Commun. Math. Anal., 2012, 13, 82-97Search in Google Scholar
[27] Sawangsup, K., Sintunavarat, W., de Hierro, A.F.R.L. J., Fixed point theorems for 𝓕ℜ-contractions with applications to solution of nonlinear matrix equations, Fixed Point Theory Appl., 2016, doi:10.1007/s11784-016-0306-zSearch in Google Scholar
[28] Ran A. C. M., Reurings M. C. B., A fixed point theorem in partially ordered sets and some applications to matrix equations, Proc. Amer. Math. Soc, 2003, 132, 1435-144310.1090/S0002-9939-03-07220-4Search in Google Scholar
[29] Berzig M., Samet B., Solving systems of nonlinear matrix equations involving Lipschitzian mappings, Fixed point Theory Appl., 2011, 8910.1186/1687-1812-2011-89Search in Google Scholar
[30] Berzig M., Solving a class of matrix equations via the Bhaskar-Lakshmikantham coupled fixed point theorem, Appl. Math. Lett., 2012, 25, 1638-164310.1016/j.aml.2012.01.028Search in Google Scholar
[31] Petruşel A., Rus I.A., Fixed point theorems in ordered L-spaces, Proc. Amer. Math. Soc, 2005, 134, no.2, 411-41810.1090/S0002-9939-05-07982-7Search in Google Scholar
[32] Long J. H., Hu X. Y, Zhang L., On the Hermitian positive definite solution of the nonlinear matrix equation X + A*x–1A + B*X–1B = I. Bull. Braz. Math. Soc, 2015, 39(3), 317-38610.1007/s00574-008-0011-7Search in Google Scholar
© 2017 Sawangsup and Sintunavarat
This work is licensed under the Creative Commons Attribution-NonCommercial-NoDerivatives 3.0 License.
Articles in the same Issue
- Regular Articles
- Integrals of Frullani type and the method of brackets
- Regular Articles
- Edge of chaos in reaction diffusion CNN model
- Regular Articles
- Calculus using proximities: a mathematical approach in which students can actually prove theorems
- Regular Articles
- An investigation on hyper S-posets over ordered semihypergroups
- Regular Articles
- The Leibniz algebras whose subalgebras are ideals
- Regular Articles
- Fixed point and multidimensional fixed point theorems with applications to nonlinear matrix equations in terms of weak altering distance functions
- Regular Articles
- Matrix rank and inertia formulas in the analysis of general linear models
- Regular Articles
- The hybrid power mean of quartic Gauss sums and Kloosterman sums
- Regular Articles
- Tauberian theorems for statistically (C,1,1) summable double sequences of fuzzy numbers
- Regular Articles
- Some properties of graded comultiplication modules
- Regular Articles
- The characterizations of upper approximation operators based on special coverings
- Regular Articles
- Bi-integrable and tri-integrable couplings of a soliton hierarchy associated with SO(4)
- Regular Articles
- Dynamics for a discrete competition and cooperation model of two enterprises with multiple delays and feedback controls
- Regular Articles
- A new view of relationship between atomic posets and complete (algebraic) lattices
- Regular Articles
- A class of extensions of Restricted (s, t)-Wythoff’s game
- Regular Articles
- New bounds for the minimum eigenvalue of 𝓜-tensors
- Regular Articles
- Shintani and Shimura lifts of cusp forms on certain arithmetic groups and their applications
- Regular Articles
- Empirical likelihood for quantile regression models with response data missing at random
- Regular Articles
- Convex combination of analytic functions
- Regular Articles
- On the Yang-Baxter-like matrix equation for rank-two matrices
- Regular Articles
- Uniform topology on EQ-algebras
- Regular Articles
- Integrations on rings
- Regular Articles
- The quasilinear parabolic kirchhoff equation
- Regular Articles
- Avoiding rainbow 2-connected subgraphs
- Regular Articles
- On non-Hopfian groups of fractions
- Regular Articles
- Singularly perturbed hyperbolic problems on metric graphs: asymptotics of solutions
- Regular Articles
- Rings in which elements are the sum of a nilpotent and a root of a fixed polynomial that commute
- Regular Articles
- Superstability of functional equations related to spherical functions
- Regular Articles
- Evaluation of the convolution sum involving the sum of divisors function for 22, 44 and 52
- Regular Articles
- Weighted minimal translation surfaces in the Galilean space with density
- Regular Articles
- Complete convergence for weighted sums of pairwise independent random variables
- Regular Articles
- Binomials transformation formulae for scaled Fibonacci numbers
- Regular Articles
- Growth functions for some uniformly amenable groups
- Regular Articles
- Hopf bifurcations in a three-species food chain system with multiple delays
- Regular Articles
- Oscillation and nonoscillation of half-linear Euler type differential equations with different periodic coefficients
- Regular Articles
- Osculating curves in 4-dimensional semi-Euclidean space with index 2
- Regular Articles
- Some new facts about group 𝒢 generated by the family of convergent permutations
- Regular Articles
- lnfinitely many solutions for fractional Schrödinger equations with perturbation via variational methods
- Regular Articles
- Supersolvable orders and inductively free arrangements
- Regular Articles
- Asymptotically almost automorphic solutions of differential equations with piecewise constant argument
- Regular Articles
- Finite groups whose all second maximal subgroups are cyclic
- Regular Articles
- Semilinear systems with a multi-valued nonlinear term
- Regular Articles
- Positive solutions for Hadamard differential systems with fractional integral conditions on an unbounded domain
- Regular Articles
- Calibration and simulation of Heston model
- Regular Articles
- One kind sixth power mean of the three-term exponential sums
- Regular Articles
- Cyclic pairs and common best proximity points in uniformly convex Banach spaces
- Regular Articles
- The uniqueness of meromorphic functions in k-punctured complex plane
- Regular Articles
- Normalizers of intermediate congruence subgroups of the Hecke subgroups
- Regular Articles
- The hyperbolicity constant of infinite circulant graphs
- Regular Articles
- Scott convergence and fuzzy Scott topology on L-posets
- Regular Articles
- One sided strong laws for random variables with infinite mean
- Regular Articles
- The join of split graphs whose completely regular endomorphisms form a monoid
- Regular Articles
- A new branch and bound algorithm for minimax ratios problems
- Regular Articles
- Upper bound estimate of incomplete Cochrane sum
- Regular Articles
- Value distributions of solutions to complex linear differential equations in angular domains
- Regular Articles
- The nonlinear diffusion equation of the ideal barotropic gas through a porous medium
- Regular Articles
- The Sheffer stroke operation reducts of basic algebras
- Regular Articles
- Extensions and improvements of Sherman’s and related inequalities for n-convex functions
- Regular Articles
- Classification lattices are geometric for complete atomistic lattices
- Regular Articles
- Possible numbers of x’s in an {x, y}-matrix with a given rank
- Regular Articles
- New error bounds for linear complementarity problems of weakly chained diagonally dominant B-matrices
- Regular Articles
- Boundedness of vector-valued B-singular integral operators in Lebesgue spaces
- Regular Articles
- On the Golomb’s conjecture and Lehmer’s numbers
- Regular Articles
- Some applications of the Archimedean copulas in the proof of the almost sure central limit theorem for ordinary maxima
- Regular Articles
- Dual-stage adaptive finite-time modified function projective multi-lag combined synchronization for multiple uncertain chaotic systems
- Regular Articles
- Corrigendum to: Dual-stage adaptive finite-time modified function projective multi-lag combined synchronization for multiple uncertain chaotic systems
- Regular Articles
- Convergence and stability of generalized φ-weak contraction mapping in CAT(0) spaces
- Regular Articles
- Triple solutions for a Dirichlet boundary value problem involving a perturbed discrete p(k)-Laplacian operator
- Regular Articles
- OD-characterization of alternating groups Ap+d
- Regular Articles
- On Jordan mappings of inverse semirings
- Regular Articles
- On generalized Ehresmann semigroups
- Regular Articles
- On topological properties of spaces obtained by the double band matrix
- Regular Articles
- Representing derivatives of Chebyshev polynomials by Chebyshev polynomials and related questions
- Regular Articles
- Chain conditions on composite Hurwitz series rings
- Regular Articles
- Coloring subgraphs with restricted amounts of hues
- Regular Articles
- An extension of the method of brackets. Part 1
- Regular Articles
- Branch-delete-bound algorithm for globally solving quadratically constrained quadratic programs
- Regular Articles
- Strong edge geodetic problem in networks
- Regular Articles
- Ricci solitons on almost Kenmotsu 3-manifolds
- Regular Articles
- Uniqueness of meromorphic functions sharing two finite sets
- Regular Articles
- On the fourth-order linear recurrence formula related to classical Gauss sums
- Regular Articles
- Dynamical behavior for a stochastic two-species competitive model
- Regular Articles
- Two new eigenvalue localization sets for tensors and theirs applications
- Regular Articles
- κ-strong sequences and the existence of generalized independent families
- Regular Articles
-
Commutators of Littlewood-Paley
- Regular Articles
- On decompositions of estimators under a general linear model with partial parameter restrictions
- Regular Articles
- Groups and monoids of Pythagorean triples connected to conics
- Regular Articles
- Hom-Lie superalgebra structures on exceptional simple Lie superalgebras of vector fields
- Regular Articles
- Numerical methods for the multiplicative partial differential equations
- Regular Articles
-
Solvable Leibniz algebras with NFn⊕
- Regular Articles
- Evaluation of the convolution sums ∑al+bm=n lσ(l) σ(m) with ab ≤ 9
- Regular Articles
- A study on soft rough semigroups and corresponding decision making applications
- Regular Articles
- Some new inequalities of Hermite-Hadamard type for s-convex functions with applications
- Regular Articles
- Deficiency of forests
- Regular Articles
- Perfect codes in power graphs of finite groups
- Regular Articles
- A new compact finite difference quasilinearization method for nonlinear evolution partial differential equations
- Regular Articles
- Does any convex quadrilateral have circumscribed ellipses?
- Regular Articles
- The dynamic of a Lie group endomorphism
- Regular Articles
- On pairs of equations in unlike powers of primes and powers of 2
- Regular Articles
- Differential subordination and convexity criteria of integral operators
- Regular Articles
- Quantitative relations between short intervals and exceptional sets of cubic Waring-Goldbach problem
- Regular Articles
- On θ-commutators and the corresponding non-commuting graphs
- Regular Articles
- Quasi-maximum likelihood estimator of Laplace (1, 1) for GARCH models
- Regular Articles
- Multiple and sign-changing solutions for discrete Robin boundary value problem with parameter dependence
- Regular Articles
- Fundamental relation on m-idempotent hyperrings
- Regular Articles
- A novel recursive method to reconstruct multivariate functions on the unit cube
- Regular Articles
- Nabla inequalities and permanence for a logistic integrodifferential equation on time scales
- Regular Articles
- Enumeration of spanning trees in the sequence of Dürer graphs
- Regular Articles
- Quotient of information matrices in comparison of linear experiments for quadratic estimation
- Regular Articles
- Fourier series of functions involving higher-order ordered Bell polynomials
- Regular Articles
- Simple modules over Auslander regular rings
- Regular Articles
- Weighted multilinear p-adic Hardy operators and commutators
- Regular Articles
- Guaranteed cost finite-time control of positive switched nonlinear systems with D-perturbation
- Regular Articles
- A modified quasi-boundary value method for an abstract ill-posed biparabolic problem
- Regular Articles
- Extended Riemann-Liouville type fractional derivative operator with applications
- Topical Issue on Topological and Algebraic Genericity in Infinite Dimensional Spaces
- The algebraic size of the family of injective operators
- Topical Issue on Topological and Algebraic Genericity in Infinite Dimensional Spaces
- The history of a general criterium on spaceability
- Topical Issue on Topological and Algebraic Genericity in Infinite Dimensional Spaces
- On sequences not enjoying Schur’s property
- Topical Issue on Topological and Algebraic Genericity in Infinite Dimensional Spaces
- A hierarchy in the family of real surjective functions
- Topical Issue on Topological and Algebraic Genericity in Infinite Dimensional Spaces
- Dynamics of multivalued linear operators
- Topical Issue on Topological and Algebraic Genericity in Infinite Dimensional Spaces
- Linear dynamics of semigroups generated by differential operators
- Special Issue on Recent Developments in Differential Equations
- Isomorphism theorems for some parabolic initial-boundary value problems in Hörmander spaces
- Special Issue on Recent Developments in Differential Equations
- Determination of a diffusion coefficient in a quasilinear parabolic equation
- Special Issue on Recent Developments in Differential Equations
- Homogeneous two-point problem for PDE of the second order in time variable and infinite order in spatial variables
- Special Issue on Recent Developments in Differential Equations
- A nonlinear plate control without linearization
- Special Issue on Recent Developments in Differential Equations
- Reduction of a Schwartz-type boundary value problem for biharmonic monogenic functions to Fredholm integral equations
- Special Issue on Recent Developments in Differential Equations
- Inverse problem for a physiologically structured population model with variable-effort harvesting
- Special Issue on Recent Developments in Differential Equations
- Existence of solutions for delay evolution equations with nonlocal conditions
- Special Issue on Recent Developments in Differential Equations
- Comments on behaviour of solutions of elliptic quasi-linear problems in a neighbourhood of boundary singularities
- Special Issue on Recent Developments in Differential Equations
- Coupled fixed point theorems in complete metric spaces endowed with a directed graph and application
- Special Issue on Recent Developments in Differential Equations
- Existence of entropy solutions for nonlinear elliptic degenerate anisotropic equations
- Special Issue on Recent Developments in Differential Equations
- Integro-differential systems with variable exponents of nonlinearity
- Special Issue on Recent Developments in Differential Equations
- Elliptic operators on refined Sobolev scales on vector bundles
- Special Issue on Recent Developments in Differential Equations
- Multiplicity solutions of a class fractional Schrödinger equations
- Special Issue on Recent Developments in Differential Equations
- Determining of right-hand side of higher order ultraparabolic equation
- Special Issue on Recent Developments in Differential Equations
- Asymptotic approximation for the solution to a semi-linear elliptic problem in a thin aneurysm-type domain
- Topical Issue on Metaheuristics - Methods and Applications
- Learnheuristics: hybridizing metaheuristics with machine learning for optimization with dynamic inputs
- Topical Issue on Metaheuristics - Methods and Applications
- Nature–inspired metaheuristic algorithms to find near–OGR sequences for WDM channel allocation and their performance comparison
- Topical Issue on Cyber-security Mathematics
- Monomial codes seen as invariant subspaces
- Topical Issue on Cyber-security Mathematics
- Expert knowledge and data analysis for detecting advanced persistent threats
- Topical Issue on Cyber-security Mathematics
- Feedback equivalence of convolutional codes over finite rings
Articles in the same Issue
- Regular Articles
- Integrals of Frullani type and the method of brackets
- Regular Articles
- Edge of chaos in reaction diffusion CNN model
- Regular Articles
- Calculus using proximities: a mathematical approach in which students can actually prove theorems
- Regular Articles
- An investigation on hyper S-posets over ordered semihypergroups
- Regular Articles
- The Leibniz algebras whose subalgebras are ideals
- Regular Articles
- Fixed point and multidimensional fixed point theorems with applications to nonlinear matrix equations in terms of weak altering distance functions
- Regular Articles
- Matrix rank and inertia formulas in the analysis of general linear models
- Regular Articles
- The hybrid power mean of quartic Gauss sums and Kloosterman sums
- Regular Articles
- Tauberian theorems for statistically (C,1,1) summable double sequences of fuzzy numbers
- Regular Articles
- Some properties of graded comultiplication modules
- Regular Articles
- The characterizations of upper approximation operators based on special coverings
- Regular Articles
- Bi-integrable and tri-integrable couplings of a soliton hierarchy associated with SO(4)
- Regular Articles
- Dynamics for a discrete competition and cooperation model of two enterprises with multiple delays and feedback controls
- Regular Articles
- A new view of relationship between atomic posets and complete (algebraic) lattices
- Regular Articles
- A class of extensions of Restricted (s, t)-Wythoff’s game
- Regular Articles
- New bounds for the minimum eigenvalue of 𝓜-tensors
- Regular Articles
- Shintani and Shimura lifts of cusp forms on certain arithmetic groups and their applications
- Regular Articles
- Empirical likelihood for quantile regression models with response data missing at random
- Regular Articles
- Convex combination of analytic functions
- Regular Articles
- On the Yang-Baxter-like matrix equation for rank-two matrices
- Regular Articles
- Uniform topology on EQ-algebras
- Regular Articles
- Integrations on rings
- Regular Articles
- The quasilinear parabolic kirchhoff equation
- Regular Articles
- Avoiding rainbow 2-connected subgraphs
- Regular Articles
- On non-Hopfian groups of fractions
- Regular Articles
- Singularly perturbed hyperbolic problems on metric graphs: asymptotics of solutions
- Regular Articles
- Rings in which elements are the sum of a nilpotent and a root of a fixed polynomial that commute
- Regular Articles
- Superstability of functional equations related to spherical functions
- Regular Articles
- Evaluation of the convolution sum involving the sum of divisors function for 22, 44 and 52
- Regular Articles
- Weighted minimal translation surfaces in the Galilean space with density
- Regular Articles
- Complete convergence for weighted sums of pairwise independent random variables
- Regular Articles
- Binomials transformation formulae for scaled Fibonacci numbers
- Regular Articles
- Growth functions for some uniformly amenable groups
- Regular Articles
- Hopf bifurcations in a three-species food chain system with multiple delays
- Regular Articles
- Oscillation and nonoscillation of half-linear Euler type differential equations with different periodic coefficients
- Regular Articles
- Osculating curves in 4-dimensional semi-Euclidean space with index 2
- Regular Articles
- Some new facts about group 𝒢 generated by the family of convergent permutations
- Regular Articles
- lnfinitely many solutions for fractional Schrödinger equations with perturbation via variational methods
- Regular Articles
- Supersolvable orders and inductively free arrangements
- Regular Articles
- Asymptotically almost automorphic solutions of differential equations with piecewise constant argument
- Regular Articles
- Finite groups whose all second maximal subgroups are cyclic
- Regular Articles
- Semilinear systems with a multi-valued nonlinear term
- Regular Articles
- Positive solutions for Hadamard differential systems with fractional integral conditions on an unbounded domain
- Regular Articles
- Calibration and simulation of Heston model
- Regular Articles
- One kind sixth power mean of the three-term exponential sums
- Regular Articles
- Cyclic pairs and common best proximity points in uniformly convex Banach spaces
- Regular Articles
- The uniqueness of meromorphic functions in k-punctured complex plane
- Regular Articles
- Normalizers of intermediate congruence subgroups of the Hecke subgroups
- Regular Articles
- The hyperbolicity constant of infinite circulant graphs
- Regular Articles
- Scott convergence and fuzzy Scott topology on L-posets
- Regular Articles
- One sided strong laws for random variables with infinite mean
- Regular Articles
- The join of split graphs whose completely regular endomorphisms form a monoid
- Regular Articles
- A new branch and bound algorithm for minimax ratios problems
- Regular Articles
- Upper bound estimate of incomplete Cochrane sum
- Regular Articles
- Value distributions of solutions to complex linear differential equations in angular domains
- Regular Articles
- The nonlinear diffusion equation of the ideal barotropic gas through a porous medium
- Regular Articles
- The Sheffer stroke operation reducts of basic algebras
- Regular Articles
- Extensions and improvements of Sherman’s and related inequalities for n-convex functions
- Regular Articles
- Classification lattices are geometric for complete atomistic lattices
- Regular Articles
- Possible numbers of x’s in an {x, y}-matrix with a given rank
- Regular Articles
- New error bounds for linear complementarity problems of weakly chained diagonally dominant B-matrices
- Regular Articles
- Boundedness of vector-valued B-singular integral operators in Lebesgue spaces
- Regular Articles
- On the Golomb’s conjecture and Lehmer’s numbers
- Regular Articles
- Some applications of the Archimedean copulas in the proof of the almost sure central limit theorem for ordinary maxima
- Regular Articles
- Dual-stage adaptive finite-time modified function projective multi-lag combined synchronization for multiple uncertain chaotic systems
- Regular Articles
- Corrigendum to: Dual-stage adaptive finite-time modified function projective multi-lag combined synchronization for multiple uncertain chaotic systems
- Regular Articles
- Convergence and stability of generalized φ-weak contraction mapping in CAT(0) spaces
- Regular Articles
- Triple solutions for a Dirichlet boundary value problem involving a perturbed discrete p(k)-Laplacian operator
- Regular Articles
- OD-characterization of alternating groups Ap+d
- Regular Articles
- On Jordan mappings of inverse semirings
- Regular Articles
- On generalized Ehresmann semigroups
- Regular Articles
- On topological properties of spaces obtained by the double band matrix
- Regular Articles
- Representing derivatives of Chebyshev polynomials by Chebyshev polynomials and related questions
- Regular Articles
- Chain conditions on composite Hurwitz series rings
- Regular Articles
- Coloring subgraphs with restricted amounts of hues
- Regular Articles
- An extension of the method of brackets. Part 1
- Regular Articles
- Branch-delete-bound algorithm for globally solving quadratically constrained quadratic programs
- Regular Articles
- Strong edge geodetic problem in networks
- Regular Articles
- Ricci solitons on almost Kenmotsu 3-manifolds
- Regular Articles
- Uniqueness of meromorphic functions sharing two finite sets
- Regular Articles
- On the fourth-order linear recurrence formula related to classical Gauss sums
- Regular Articles
- Dynamical behavior for a stochastic two-species competitive model
- Regular Articles
- Two new eigenvalue localization sets for tensors and theirs applications
- Regular Articles
- κ-strong sequences and the existence of generalized independent families
- Regular Articles
-
Commutators of Littlewood-Paley
- Regular Articles
- On decompositions of estimators under a general linear model with partial parameter restrictions
- Regular Articles
- Groups and monoids of Pythagorean triples connected to conics
- Regular Articles
- Hom-Lie superalgebra structures on exceptional simple Lie superalgebras of vector fields
- Regular Articles
- Numerical methods for the multiplicative partial differential equations
- Regular Articles
-
Solvable Leibniz algebras with NFn⊕
- Regular Articles
- Evaluation of the convolution sums ∑al+bm=n lσ(l) σ(m) with ab ≤ 9
- Regular Articles
- A study on soft rough semigroups and corresponding decision making applications
- Regular Articles
- Some new inequalities of Hermite-Hadamard type for s-convex functions with applications
- Regular Articles
- Deficiency of forests
- Regular Articles
- Perfect codes in power graphs of finite groups
- Regular Articles
- A new compact finite difference quasilinearization method for nonlinear evolution partial differential equations
- Regular Articles
- Does any convex quadrilateral have circumscribed ellipses?
- Regular Articles
- The dynamic of a Lie group endomorphism
- Regular Articles
- On pairs of equations in unlike powers of primes and powers of 2
- Regular Articles
- Differential subordination and convexity criteria of integral operators
- Regular Articles
- Quantitative relations between short intervals and exceptional sets of cubic Waring-Goldbach problem
- Regular Articles
- On θ-commutators and the corresponding non-commuting graphs
- Regular Articles
- Quasi-maximum likelihood estimator of Laplace (1, 1) for GARCH models
- Regular Articles
- Multiple and sign-changing solutions for discrete Robin boundary value problem with parameter dependence
- Regular Articles
- Fundamental relation on m-idempotent hyperrings
- Regular Articles
- A novel recursive method to reconstruct multivariate functions on the unit cube
- Regular Articles
- Nabla inequalities and permanence for a logistic integrodifferential equation on time scales
- Regular Articles
- Enumeration of spanning trees in the sequence of Dürer graphs
- Regular Articles
- Quotient of information matrices in comparison of linear experiments for quadratic estimation
- Regular Articles
- Fourier series of functions involving higher-order ordered Bell polynomials
- Regular Articles
- Simple modules over Auslander regular rings
- Regular Articles
- Weighted multilinear p-adic Hardy operators and commutators
- Regular Articles
- Guaranteed cost finite-time control of positive switched nonlinear systems with D-perturbation
- Regular Articles
- A modified quasi-boundary value method for an abstract ill-posed biparabolic problem
- Regular Articles
- Extended Riemann-Liouville type fractional derivative operator with applications
- Topical Issue on Topological and Algebraic Genericity in Infinite Dimensional Spaces
- The algebraic size of the family of injective operators
- Topical Issue on Topological and Algebraic Genericity in Infinite Dimensional Spaces
- The history of a general criterium on spaceability
- Topical Issue on Topological and Algebraic Genericity in Infinite Dimensional Spaces
- On sequences not enjoying Schur’s property
- Topical Issue on Topological and Algebraic Genericity in Infinite Dimensional Spaces
- A hierarchy in the family of real surjective functions
- Topical Issue on Topological and Algebraic Genericity in Infinite Dimensional Spaces
- Dynamics of multivalued linear operators
- Topical Issue on Topological and Algebraic Genericity in Infinite Dimensional Spaces
- Linear dynamics of semigroups generated by differential operators
- Special Issue on Recent Developments in Differential Equations
- Isomorphism theorems for some parabolic initial-boundary value problems in Hörmander spaces
- Special Issue on Recent Developments in Differential Equations
- Determination of a diffusion coefficient in a quasilinear parabolic equation
- Special Issue on Recent Developments in Differential Equations
- Homogeneous two-point problem for PDE of the second order in time variable and infinite order in spatial variables
- Special Issue on Recent Developments in Differential Equations
- A nonlinear plate control without linearization
- Special Issue on Recent Developments in Differential Equations
- Reduction of a Schwartz-type boundary value problem for biharmonic monogenic functions to Fredholm integral equations
- Special Issue on Recent Developments in Differential Equations
- Inverse problem for a physiologically structured population model with variable-effort harvesting
- Special Issue on Recent Developments in Differential Equations
- Existence of solutions for delay evolution equations with nonlocal conditions
- Special Issue on Recent Developments in Differential Equations
- Comments on behaviour of solutions of elliptic quasi-linear problems in a neighbourhood of boundary singularities
- Special Issue on Recent Developments in Differential Equations
- Coupled fixed point theorems in complete metric spaces endowed with a directed graph and application
- Special Issue on Recent Developments in Differential Equations
- Existence of entropy solutions for nonlinear elliptic degenerate anisotropic equations
- Special Issue on Recent Developments in Differential Equations
- Integro-differential systems with variable exponents of nonlinearity
- Special Issue on Recent Developments in Differential Equations
- Elliptic operators on refined Sobolev scales on vector bundles
- Special Issue on Recent Developments in Differential Equations
- Multiplicity solutions of a class fractional Schrödinger equations
- Special Issue on Recent Developments in Differential Equations
- Determining of right-hand side of higher order ultraparabolic equation
- Special Issue on Recent Developments in Differential Equations
- Asymptotic approximation for the solution to a semi-linear elliptic problem in a thin aneurysm-type domain
- Topical Issue on Metaheuristics - Methods and Applications
- Learnheuristics: hybridizing metaheuristics with machine learning for optimization with dynamic inputs
- Topical Issue on Metaheuristics - Methods and Applications
- Nature–inspired metaheuristic algorithms to find near–OGR sequences for WDM channel allocation and their performance comparison
- Topical Issue on Cyber-security Mathematics
- Monomial codes seen as invariant subspaces
- Topical Issue on Cyber-security Mathematics
- Expert knowledge and data analysis for detecting advanced persistent threats
- Topical Issue on Cyber-security Mathematics
- Feedback equivalence of convolutional codes over finite rings