Dual-stage adaptive finite-time modified function projective multi-lag combined synchronization for multiple uncertain chaotic systems
-
Qiaoping Li
 and
Sanyang Liu
and
Sanyang Liu

Abstract
In this paper, for multiple different chaotic systems with unknown bounded disturbances and fully unknown parameters, a more general synchronization method called modified function projective multi-lag combined synchronization is proposed. This new method covers almost all of the synchronization methods available. As an advantage of the new method, the drive system is a linear combination of multiple chaotic systems, which makes the signal hidden channels more abundant and the signal hidden methods more flexible. Based on the finite-time stability theory and the sliding mode variable structure control technique, a dual-stage adaptive variable structure control scheme is established to realize the finite-time synchronization and to tackle the parameters well. The detailed theoretical derivation and representative numerical simulation is put forward to demonstrate the correctness and effectiveness of the advanced scheme.
1 System description
In our drive-response type combination synchronization scheme, m different chaotic systems with unknown parameters and disturbance are considered as the drive systems. The lth drive system is given by
in which l = 1, 2, ···, m.
At the meantime, the response system is described as:
where
2 Preliminary definition and lemmas
As the essence of finite-time synchronization, it means that the state trajectory of the response system can converge to the state trajectory of the drive system within a finite time. In this section, we introduce the precise definitions and several important lemmas, which are necessary for further study.
Assumption 2.1
The unknown parameters θl and φ are bounded, in another word, there exist known constants θ̄l ≥ 0 and φ̄ ≥ 0, such that
where l = 1, 2, ···, m, and ||·|| stands for the 2-norm.
Assumption 2.2
The unknown external time-varying disturbances wl (t) and di (t) are bounded, that is to say, there exist non-negative constants
where l = 1, 2, ···, m and i = 1, 2, ···, n.
Lemma 2.3
([40]). Assume that a continuous and positive-definite function V(t) satisfies the following differential inequality:
where b1 > 0, b2 > 0 and 0 < ϑ < 1 are constants.
Then, when
with T given by
Lemma 2.4
([35]). Consider the system
where the mapping function f : I → Rn is continuous. If there exists a continuous differential positive-definite function V : I → R, real constants ζ > 0, 0 < ϱ < 1, satisfying
then, the origin of system (5) is a locally finite-time stable equilibrium, the settling time T (x0) depends on the initial state x(0) = x0, and the following inequality holds
Lemma 2.5
([15]). Suppose a1, a2, · · ·, an and 0 < q < 2 are all real numbers, then the inequality below holds
Definition 2.7
It is said that the group of the drive systems (1) and the response system (2) are modified function projective multi-lag combined synchronization (MFPMLCS), if there exist m different delay times τl and m + 1 scaling matrices Al(l = 1, 2, · · ·, m) and Λ(t), such that
or
where
Definition 2.8
If there exist a constant T > 0, such that
or
and
Remark 2.9
As is shown in Table 1, the proposed MFPMLCS is more general, and it concludes a large class of the previous synchronization methods. Selecting specific scaling matrix Al, Λ(t) and specific delay times τl, l = 1, 2, · · ·, m, the MFPMLCS will be simplified to specific synchronization. Here CS* represents combined synchronization, CS means complete synchronization, Λ = diag{λ1, · · ·, λn}, I is a n × n unit matrix.
The special cases of MFPMLCS.
| MFPMLCS | |||
| case1 | m = 2, τ1 = τ2 = 0, Λ(t) = Λ | e(t) = A1 x1(t) + A2x2(t)−Λy(t) | CS*[38] |
| case2 | m = 1, A1 = I | e(t) = x(t − τ) − Λ(t)y(t) | MFPLS [33] |
| case3 | m = 1, τ1 = 0, A1 = I | e(t) = x(t) − Λ(t)y(t) | MFPS [30] |
| case4 | m= 1, τ1 = 0, A1 = I, Λ(t)= Λ | e(t) = x(t) − Λz(t) | PS [26] |
| case5 | m= 1, τ1 = 0, A1 = I, Λ(t)= −I | e(t) = x(t) − y(t) | CS [17] |
| case6 | m= 1, τ1 = 0, A1 = I, Λ(t)= I | e(t) = x(t) + y(t) | AS [19] |
Remark 2.10
As another advantage of the new method, the drive system is a linear combination of the multiple chaotic systems, which means the signal hidden channels are more diversified and the signal hidden methods are more flexible. The complexity of this new synchronization scheme improves, to a great degree, the abilities to anti attacking and anti decoding in the process of signal transmission.
Notice that λi(t) ≠ 0 is a continuously differentiable function with bound, we can further put forward the following assumption.
Assumption 2.11
There exist positive constants pi and qi, i = 1, 2, ···, n, i.e.
Let
combining Assumption 2.2 with Assumption 2.11, we can obtain that ρi(t) is bounded.
Denote ρ = [ρ1, ρ2, · · ·, ρn]T in which ρi = sup|ρi(t)|, i = 1, 2, · · ·, n. To deal with the more general case in which the bound ρi > 0 is unknown, the following assumption is needed.
Assumption 2.12
There exist definite positive constants ρ̄i (i = 1, 2, · · ·, n) which are large enough, such that
In order to solve the finite-time synchronization problem, we now define the MFPMLCS error vector
that is to say
from which, the corresponding error dynamic system below can be obtained:
For convenience, let us denote
Now, the error dynamics system (18) can be reduced as follows
3 Design of dual-stage finite-time control scheme
It is clear that the finite-time MFPMLCS problem is directly equivalent to the finite-time stabilization of the error system (20). In this section, we pay our attention to design an adaptive sliding mode variable structure control scheme to ensure the error trajectories converge to zero within a limited time. The finite-time control scheme is divided into the sliding mode stage and the sliding mode reaching stage. What is more, the time required for each stage is limited.
3.1 Sliding mode stage
In order to realize the desired finite-time sliding motion, let us establish a new nonsingular terminal sliding surface [41] as follows,
where the constants 0 < αi < 1, ciυ > 0, υ = 0, 1, 2, 3, i = 1, 2, ···, n.
Remark 3.1
Compared with the terminal sliding surface
which is proposed in [15], the terminal sliding surface (21) has the following advantage: the factor ci1ei + ci2sgn (ei)|ei|2−αi plays a leading role to guarantee a fast convergence speed as |ei(t)| is much larger than 1, while the factor ci3sgn (ei)|ei|αi is the dominant one ensuring the finite-time convergence as |ei(t)| is much less than 1.
According to the sliding mode control theory, when the state trajectories of the error system are located on the sliding surface, it is necessary and sufficient that
from which, we can obtain the following dynamics of sliding mode:
Theorem 3.2
The error vector e(t) of the sliding mode is finite-time stable and its trajectory converges to the equilibriums e(t) = 0 within a finite time T1,
with
and
Proof
Design the following Lyapunov function for the dynamics of the proposed nonsingular terminal sliding mode (22)
Taking the time derivative of V1i(t), we obtain
Applying the Lemma 2.3, we can directly deduce that during the sliding mode phase the error ei (t) converges to zero in the finite time T1i given by (24). This yields that the error vector e(t) converges to e(t) = 0 in a finite time T1 given by (23). Hence the proof is completed. □
3.2 Sliding mode reaching stage
Until now, the suitable sliding surface is established and the finite-time convergence and stability in sliding mode stage has been proved. We now turn to design an adaptive controller to force the error trajectories move toward the sliding surface within a finite time and remain on it forever. In order to achieve the finite-time sliding mode reaching stage, the controller is given as follows:
with
in which, the constants ς > 0 and ki > 0 are the control gains, which can be designed according to the demands of the designer. ρ̂ = [ρ̂1, · · ·, ρ̂n]T is the estimation of the upper bound constant vector ρ, θ̂l and φ̂ are the estimations of the parameters θl, φ respectively, and η = [c10s1, c20s2, ···, cn0sn]T, μ = min{c10k1, c20k2, ···, cn0kn}.
Meanwhile, the adaptive laws are given as follows to tackle the unknown parameters:
Theorem 3.3
Using the controller (28) and the adaptive control laws (30), the state of the MFPMLCS error system (22) will reach to the sliding surface s = 0 in a finite time T2, and remain on it forever. Meanwhile, the sliding mode reaching time T2 satisfies
in which, γ = min{μ, ς}.
Proof
Choose the following Lyapunov function candidate
in which
Taking the time derivative of V21(t), we get
Along the error system, V̇21(t) can be described as
Using the fact
we can derive
The time derivative of V22(t) can be calculated as
Combining (34) with (35), we can obtain
According to Lemma 2.6, we get
Applying Lemma 2.4, it follows that the error trajectory e(t) converges to the sliding surface s(t) = 0 in the finite time T̂2 and then remains on it forever, meanwhile the following inequality holds
It is clear that T̂2 ≤ T2 in which T2 is given by (31). This completes the proof. □
Remark 3.4
The results of Theorem 3.2 and Theorem 3.3 imply that the group of the drive systems (1) and the response system (2) are MFPMLCS in the finite time T1 + T2 under the action of the adaptive control law (28)-(30).
Remark 3.5
According to the previous discussion, the convergence times T1, T2 and the controller ui(t) are depended on the control gains Ciυ, ki and ς. On the one hand, T1 is proportional to the value of Ciυ, which means a smaller ci0 results in a shorter convergence times T1, on the other hand, the sliding mode reaching time T2 is inversely proportional to γ = min{μ, ς} = min{c10k1, c20k2, · · ·, cn0kn, ς}. At the same time, the control input ui(t) is proportional to
Remark 3.6
According to Eqs.(28), the control input ui(t) contains the factor
with
where the switching gain δ is a sufficiently small positive constant which can be chosen according to the designer requirements.
Another effective approach is using the function
4 Numerical simulation
In this section, we choose two famous chaotic systems: Lü system and Lorenz system with fully unknown parameters and unknown bounded disturbances as the drive systems. At the same time, another well-known chaotic system named Chen system is considered as the response system. They can be described as follows:
Lü system:
Lorenz system:
Chen system
In the simulation, the drive systems are started with x1(0) = (2, 2, 2) and x2(0) = (3, 3, 3), and the response system is initialized with y(0) = (-6, -6, -6), the control gains are selected as k = (100, 80, 80), αi = 0.1, ci0 = 2, ci1 = 10, ci2 = 30, ci3 = 50 (i = 1, 2, 3) and ς = 0.1, it yields μ = 40, γ = 0.1. The bound vectors are chosen as ||ρ̄|| = 15, θ̄l = φ̄ = 55. Choosing delay times τ1 = 1, τ2 = 2 and the following scaling matrices
Using the modified controller (39)-(40) and the adaptive control law (30) with δ = 0.1, the MFPMLCS errors are revealed in Figure 1. It is observed that the MFPMLCS errors convergence to ei(t) = 0 within a very short time. The time responses of the adaptive parameter vectors ρ̂, θ̂l and φ̂, converge to the values ρ, θl and φ, respectively which can be shown in Figures 2-5. Meanwhile, Figure 6 shows the sliding surface can rapidly converge to zero. The simulation results illustrate the effectiveness of the proposed method.

Time response of MFPLS error e

Time response of ρ̂

Time response of θ̂1

Time response of θ̂2

Time response of φ̂
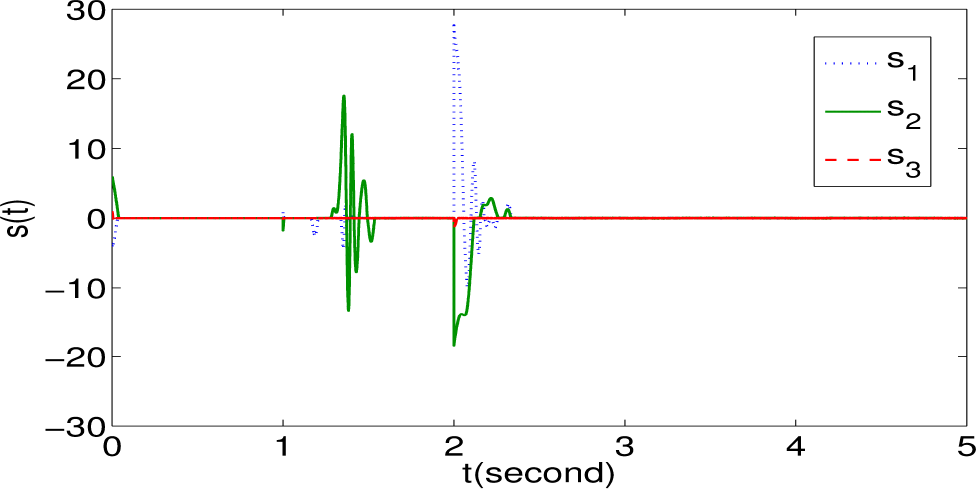
Time response of si(t)
5 Conclusion
In this paper, we dealt with the problem of the finite-time modified function projective multi-lag combined synchronization (MFPMLCS) for a series of different chaotic systems with unknown bounded disturbances and fully unknown parameters. Based upon the sliding mode control technique and Lyapunov stability theory, we designed an adaptive dual-stage variable structure control scheme to realize the finite-time synchronization. The resulted systems are provided with fast convergence rate, strong robustness, small chattering and high accuracy. Finally, the numerical simulation demonstrated the correctness and effectiveness of the advanced scheme.
Competing interests
The authors declare that there is no conflict of interests regarding the publication of this article.
Acknowledgement
This paper is supported by the National Natural Science Foundation of China (61373174) and (11301409), thanks for all the references authors.
References
[1] Song Q., Cao J., Liu F., “Synchronization of complex dynamical networks with nonidentical nodes,” Phys. Lett. A, 2010, 374, 544-551.10.1016/j.physleta.2009.11.032Search in Google Scholar
[2] Lu J., Ho D.W.C., Cao J., “A unified synchronization criterion for impulsive dynamical networks,” Automatica, 46 (2010) 1215-1221.10.1016/j.automatica.2010.04.005Search in Google Scholar
[3] Grzybowski J.M.V., Rafikov M., Balthazar J.M., “Synchronization of the unified chaotic system and application in secure communication,” Commun.Nonlinear Sci.Numer.Simulat., 2009, 14, 2793-2806.10.1016/j.cnsns.2008.09.028Search in Google Scholar
[4] Wang B., Wen G., “On the synchronization of a class of chaotic systems based on backstepping method,” Phys. Lett. A, 2007, 370, 35-39.10.1016/j.physleta.2007.05.030Search in Google Scholar
[5] Wang F., Liu C., “Synchronization of unified chaotic system based on passive control,” Physica D, 2007, 225, 55-60.10.1016/j.physd.2006.09.038Search in Google Scholar
[6] Lee S.M., Ji D.H., Park J.H., Won S.C., “H∞ synchronization of chaotic systems via dynamic feedback approach,” Phys. Lett. A, 2008, 372, 4905-4912.10.1016/j.physleta.2008.05.047Search in Google Scholar
[7] Lin J., Yan J., “Adaptive synchronization for two identical generalized Lorenz chaotic systems via a single controller,” Nonlinear Anal. RWA, 10 (2009) 1151-1159.10.1016/j.nonrwa.2007.12.005Search in Google Scholar
[8] Chang W., “PID control for chaotic synchronization using particle swarm optimization,” Chaos Soliton. Fract., 2009, 39, 910-917.10.1016/j.chaos.2007.01.064Search in Google Scholar
[9] Chen Y., Wu X., Gui Z., “Global synchronization criteria for a class of third-order non-autonomous chaotic systems via linear state error feedback control,” Appl. Math. Model., 2010, 34, 4161-4170.10.1016/j.apm.2010.04.013Search in Google Scholar
[10] Yau H., Shieh C., “Chaos synchronization using fuzzy logic controller,” Nonlinear Anal. RWA, 2008, 9, 1800-1810.10.1016/j.nonrwa.2007.05.009Search in Google Scholar
[11] Haimo V.T., “Finite time controllers,” SIAM J.Control Optim., 1986, 24, 760-770.10.1137/0324047Search in Google Scholar
[12] Bhat S.P., Bernstein D.S.,” Finite-time stability of continuous autonomous systems,” SIAM J.Control Optim., 2000, 38, 751.10.1137/S0363012997321358Search in Google Scholar
[13] Yu X.H., Man Z.H., “Fast terminal sliding-mode control design for nonlinear dynamical systems,” IEEE Trans. Circuits Syst. I. Fundam. Theory Appl., 2002, 49, 261-264.10.1109/81.983876Search in Google Scholar
[14] Wang H., Han Z., Xie Q., Zhang W., “Finite-time chaos control via nonsingular terminal sliding mode control,” Commun. Nonlinear Sci. Numer. Simul., 2009, 14, 2728-2733.10.1016/j.cnsns.2008.08.013Search in Google Scholar
[15] Aghababa M.P., Khanmohammadi S., Alizadeh G., “Finite-time synchronization of two different chaotic systems with unknown parameters via sliding mode technique,” Appl. Math. Model., 2011, 35, 3080-3091.10.1016/j.apm.2010.12.020Search in Google Scholar
[16] Sun J., Shen Y., Wang X., Chen J., “Finite-time combination-Ccombination synchronization of four different chaotic systems with unknown parametersvia sliding mode control,” Nonlinear Dyn., 2014, 76, 383-397.10.1007/s11071-013-1133-zSearch in Google Scholar
[17] Pecora L.M., Carroll T.L., “Synchronization in chaotic systems,” Phys. Rev. Lett., 1996, 64, 821-824.10.1016/B978-012396840-1/50040-0Search in Google Scholar
[18] Yu H.J., Liu Y.Z., “Chaotic synchronization based on stability criterion of linear systems,” Phys. Lett. A, 2003, 314, 292-298.10.1016/S0375-9601(03)00908-3Search in Google Scholar
[19] Kim C.M., Rim S., Kye W.H., Ryu J.W., Park Y.J., “Anti-synchronization of chaotic oscillators,” Phys. Lett. A, 2003, 320, 39-49.10.1016/j.physleta.2003.10.051Search in Google Scholar
[20] Rosenblum M.G., Pikovsky A.S., Kurths J., “From phase to lag synchronization in coupled chaotic oscillators, “ Phys. rev. lett., 1997, 78, 4193-4196.10.1103/PhysRevLett.78.4193Search in Google Scholar
[21] Boccaletti S., Valladares D.L., “Characterization of intermittent lag synchronization,” Phys. rev. e, 2000, 62, 7497-7500.10.1103/PhysRevE.62.7497Search in Google Scholar PubMed
[22] Park E.H., Zaks M.A., Kurths J., “Phase synchronization in the forced Lorenz system,” Phys. rev. e, 1999, 60, 6627-6638.10.1103/PhysRevE.60.6627Search in Google Scholar
[23] Yang S.S., Juan C.K., “Generalized synchronization in chaotic systems,” Chaos Soliton. Fract., 1998, 9, 1703-1704.10.1016/S0960-0779(97)00149-5Search in Google Scholar
[24] Hramov A.E., Koronovskii A.A., Moskalenko O.T., “Generalized synchronization onset,” Europhys. Lett., 2005, 72, 901-907.10.1209/epl/i2005-10343-4Search in Google Scholar
[25] Mainieri R., Rehacek J., “Projective synchronization in three-dimensional chaotic systems,” Phys. rev. lett., 1999, 82, 3042-3045.10.1103/PhysRevLett.82.3042Search in Google Scholar
[26] Wen G.L., Xu D.L., “Nonlinear observer control for full-state projective synchronization in chaotic continuous-time systems,” Chaos. Soliton. Fract., 2005, 26, 71-77.10.1016/j.chaos.2004.09.117Search in Google Scholar
[27] Cai N., Jing Y., Zhang S., “Modified projective synchronization of chaotic systems with disturbances via active sliding mode control,” Commun. Nonlinear Sci Numer. Simulat., 2010, 15, 1613-1620.10.1016/j.cnsns.2009.06.012Search in Google Scholar
[28] Du H., Zeng Q., Wang C., “Function projective synchronization of different chaotic systems with uncertain parameters,” Phys. Lett. A, 372 (2008) 5402-5410.10.1016/j.physleta.2008.06.036Search in Google Scholar
[29] Hramov A.E., Koronovskii A.A., “An approach to chaotic synchronization,” Chaos, 2014, 14, 603-610.10.1063/1.1775991Search in Google Scholar PubMed
[30] Du H., Zeng O., Wang C., “Modified function projective synchronization of chaotic system,” Chaos Solitons Fract., 2009, 42, 2399-2404.10.1016/j.chaos.2009.03.120Search in Google Scholar
[31] Sudheer K.S., Sabir M., “Switched modified function projective synchronization of hyperchaotic Qi system with uncertain parameters,” Commun. Nonlinear Sci Numer. Simulat., 2010, 15, 4058-4064.10.1016/j.cnsns.2010.01.014Search in Google Scholar
[32] Sudheer K.S., Sabir M., “Adaptive modified function projective synchronization of multiple time-delayed chaotic Rossler system,” Phys. Lett. A, 2011, 375, 1176-1178.10.1016/j.physleta.2011.01.028Search in Google Scholar
[33] Du H., Zeng Q., Lü N., “A general method for modified function lag synchronization in chaotic systems,” Phys. Lett. A, 2010, 374, 1493-1496.10.1016/j.physleta.2010.01.058Search in Google Scholar
[34] Gao Y.B., Sun B.H., Lu G.P., “Modified function projective lag synchronization of chaotic systems with disturbance estimations,” Applied Mathematical Modelling, 2013, 37, 4993-5000.10.1016/j.apm.2012.09.058Search in Google Scholar
[35] Wang X., Wei N., “Modified function projective lag synchronization of hyperchaotic complex systems with parameter perturbations and external perturbations,” Journal of Vibration and Control, 2015, 21, 3266-3280.10.1177/1077546314521263Search in Google Scholar
[36] Wang S.G., Zheng s., Zhang B.W., “Modified function projective lag synchronization of uncertain complex networks with time-varying coupling strength,” Optik, 2016, 127, 4716-4725.10.1016/j.ijleo.2016.01.085Search in Google Scholar
[37] Bhat S.P., Bernstein D.S., “Finite-time stability of continuous autonomous systems,” SIAM J.Control Optim., 2000, 38, 751-766.10.1137/S0363012997321358Search in Google Scholar
[38] Luo R., Wang Y., Deng S., “Combination synchronization of three classic chaotic systems using active backstepping design,” Chaos, 2011, 21, 043114.10.1063/1.3655366Search in Google Scholar PubMed
[39] Luo R., Wang Y., “Finite-time stochastic combination synchronization of three different chaotic systems and its application in secure communication,” Chaos, 2012, 22, 023109.10.1063/1.3702864Search in Google Scholar PubMed
[40] Xu Y.H., Zhou W.N., Fang J.A., Xie C.R., Tong D.B., “Finite-time synchronization of the complex dynamical network with non-derivative and derivative coupling,” Neurocomputing, 2016, 173, 1356-1361.10.1016/j.neucom.2015.09.008Search in Google Scholar
[41] Tran X.T., Kang H.J., “Continuous adaptive finite-time modified function projective lag synchronization of uncertain hyperchaotic systems,” Transactions of the Institute of Measurement and Control, 2016, 0142331216670453.10.1177/0142331216670453Search in Google Scholar
[42] Liu J., Liu S., Sprott J.C., “Adaptive complex modified hybrid function projective synchronization of different dimensional complex chaos with uncertain complex parameters,” Nonlinear Dynamics, 2016, 83, 1109-1121.10.1007/s11071-015-2391-8Search in Google Scholar
[43] Chen Y., Xu Y., Lin Q., “Global finite-time lag synchronization for a class of chaotic systems with the cubic terms in the presence of time delay,” Control Conference (CCC), 2016 35th Chinese. IEEE, 2016, 984-988.10.1109/ChiCC.2016.7553215Search in Google Scholar
[44] Abooee A., Khorasani M.M., Haeri Μ., “A robust finite-time hyperchaotic secure communication scheme based on terminal sliding mode control,” Electrical Engineering (ICEE), 201624th Iranian Conference on. IEEE, 2016, 854-858.10.1109/IranianCEE.2016.7585639Search in Google Scholar
[45] Shi L., Yang X., Li Y., “Finite-time synchronization of nonidentical chaotic systems with multiple time-varying delays and bounded perturbations,” Nonlinear Dynamics, 2016, 83, 75-87.10.1007/s11071-015-2310-zSearch in Google Scholar
[46] Al-mahbashi G., Noorani M.S.M., Bakar S.A., “Robust projective lag synchronization in drive-response dynamical networks via adaptive control,” The European Physical Journal Special Topics, 2016, 225, 51-64.10.1140/epjst/e2016-02620-1Search in Google Scholar
© 2017 Li and Liu
This work is licensed under the Creative Commons Attribution-NonCommercial-NoDerivatives 3.0 License.
Articles in the same Issue
- Regular Articles
- Integrals of Frullani type and the method of brackets
- Regular Articles
- Edge of chaos in reaction diffusion CNN model
- Regular Articles
- Calculus using proximities: a mathematical approach in which students can actually prove theorems
- Regular Articles
- An investigation on hyper S-posets over ordered semihypergroups
- Regular Articles
- The Leibniz algebras whose subalgebras are ideals
- Regular Articles
- Fixed point and multidimensional fixed point theorems with applications to nonlinear matrix equations in terms of weak altering distance functions
- Regular Articles
- Matrix rank and inertia formulas in the analysis of general linear models
- Regular Articles
- The hybrid power mean of quartic Gauss sums and Kloosterman sums
- Regular Articles
- Tauberian theorems for statistically (C,1,1) summable double sequences of fuzzy numbers
- Regular Articles
- Some properties of graded comultiplication modules
- Regular Articles
- The characterizations of upper approximation operators based on special coverings
- Regular Articles
- Bi-integrable and tri-integrable couplings of a soliton hierarchy associated with SO(4)
- Regular Articles
- Dynamics for a discrete competition and cooperation model of two enterprises with multiple delays and feedback controls
- Regular Articles
- A new view of relationship between atomic posets and complete (algebraic) lattices
- Regular Articles
- A class of extensions of Restricted (s, t)-Wythoff’s game
- Regular Articles
- New bounds for the minimum eigenvalue of 𝓜-tensors
- Regular Articles
- Shintani and Shimura lifts of cusp forms on certain arithmetic groups and their applications
- Regular Articles
- Empirical likelihood for quantile regression models with response data missing at random
- Regular Articles
- Convex combination of analytic functions
- Regular Articles
- On the Yang-Baxter-like matrix equation for rank-two matrices
- Regular Articles
- Uniform topology on EQ-algebras
- Regular Articles
- Integrations on rings
- Regular Articles
- The quasilinear parabolic kirchhoff equation
- Regular Articles
- Avoiding rainbow 2-connected subgraphs
- Regular Articles
- On non-Hopfian groups of fractions
- Regular Articles
- Singularly perturbed hyperbolic problems on metric graphs: asymptotics of solutions
- Regular Articles
- Rings in which elements are the sum of a nilpotent and a root of a fixed polynomial that commute
- Regular Articles
- Superstability of functional equations related to spherical functions
- Regular Articles
- Evaluation of the convolution sum involving the sum of divisors function for 22, 44 and 52
- Regular Articles
- Weighted minimal translation surfaces in the Galilean space with density
- Regular Articles
- Complete convergence for weighted sums of pairwise independent random variables
- Regular Articles
- Binomials transformation formulae for scaled Fibonacci numbers
- Regular Articles
- Growth functions for some uniformly amenable groups
- Regular Articles
- Hopf bifurcations in a three-species food chain system with multiple delays
- Regular Articles
- Oscillation and nonoscillation of half-linear Euler type differential equations with different periodic coefficients
- Regular Articles
- Osculating curves in 4-dimensional semi-Euclidean space with index 2
- Regular Articles
- Some new facts about group 𝒢 generated by the family of convergent permutations
- Regular Articles
- lnfinitely many solutions for fractional Schrödinger equations with perturbation via variational methods
- Regular Articles
- Supersolvable orders and inductively free arrangements
- Regular Articles
- Asymptotically almost automorphic solutions of differential equations with piecewise constant argument
- Regular Articles
- Finite groups whose all second maximal subgroups are cyclic
- Regular Articles
- Semilinear systems with a multi-valued nonlinear term
- Regular Articles
- Positive solutions for Hadamard differential systems with fractional integral conditions on an unbounded domain
- Regular Articles
- Calibration and simulation of Heston model
- Regular Articles
- One kind sixth power mean of the three-term exponential sums
- Regular Articles
- Cyclic pairs and common best proximity points in uniformly convex Banach spaces
- Regular Articles
- The uniqueness of meromorphic functions in k-punctured complex plane
- Regular Articles
- Normalizers of intermediate congruence subgroups of the Hecke subgroups
- Regular Articles
- The hyperbolicity constant of infinite circulant graphs
- Regular Articles
- Scott convergence and fuzzy Scott topology on L-posets
- Regular Articles
- One sided strong laws for random variables with infinite mean
- Regular Articles
- The join of split graphs whose completely regular endomorphisms form a monoid
- Regular Articles
- A new branch and bound algorithm for minimax ratios problems
- Regular Articles
- Upper bound estimate of incomplete Cochrane sum
- Regular Articles
- Value distributions of solutions to complex linear differential equations in angular domains
- Regular Articles
- The nonlinear diffusion equation of the ideal barotropic gas through a porous medium
- Regular Articles
- The Sheffer stroke operation reducts of basic algebras
- Regular Articles
- Extensions and improvements of Sherman’s and related inequalities for n-convex functions
- Regular Articles
- Classification lattices are geometric for complete atomistic lattices
- Regular Articles
- Possible numbers of x’s in an {x, y}-matrix with a given rank
- Regular Articles
- New error bounds for linear complementarity problems of weakly chained diagonally dominant B-matrices
- Regular Articles
- Boundedness of vector-valued B-singular integral operators in Lebesgue spaces
- Regular Articles
- On the Golomb’s conjecture and Lehmer’s numbers
- Regular Articles
- Some applications of the Archimedean copulas in the proof of the almost sure central limit theorem for ordinary maxima
- Regular Articles
- Dual-stage adaptive finite-time modified function projective multi-lag combined synchronization for multiple uncertain chaotic systems
- Regular Articles
- Corrigendum to: Dual-stage adaptive finite-time modified function projective multi-lag combined synchronization for multiple uncertain chaotic systems
- Regular Articles
- Convergence and stability of generalized φ-weak contraction mapping in CAT(0) spaces
- Regular Articles
- Triple solutions for a Dirichlet boundary value problem involving a perturbed discrete p(k)-Laplacian operator
- Regular Articles
- OD-characterization of alternating groups Ap+d
- Regular Articles
- On Jordan mappings of inverse semirings
- Regular Articles
- On generalized Ehresmann semigroups
- Regular Articles
- On topological properties of spaces obtained by the double band matrix
- Regular Articles
- Representing derivatives of Chebyshev polynomials by Chebyshev polynomials and related questions
- Regular Articles
- Chain conditions on composite Hurwitz series rings
- Regular Articles
- Coloring subgraphs with restricted amounts of hues
- Regular Articles
- An extension of the method of brackets. Part 1
- Regular Articles
- Branch-delete-bound algorithm for globally solving quadratically constrained quadratic programs
- Regular Articles
- Strong edge geodetic problem in networks
- Regular Articles
- Ricci solitons on almost Kenmotsu 3-manifolds
- Regular Articles
- Uniqueness of meromorphic functions sharing two finite sets
- Regular Articles
- On the fourth-order linear recurrence formula related to classical Gauss sums
- Regular Articles
- Dynamical behavior for a stochastic two-species competitive model
- Regular Articles
- Two new eigenvalue localization sets for tensors and theirs applications
- Regular Articles
- κ-strong sequences and the existence of generalized independent families
- Regular Articles
-
Commutators of Littlewood-Paley
- Regular Articles
- On decompositions of estimators under a general linear model with partial parameter restrictions
- Regular Articles
- Groups and monoids of Pythagorean triples connected to conics
- Regular Articles
- Hom-Lie superalgebra structures on exceptional simple Lie superalgebras of vector fields
- Regular Articles
- Numerical methods for the multiplicative partial differential equations
- Regular Articles
-
Solvable Leibniz algebras with NFn⊕
- Regular Articles
- Evaluation of the convolution sums ∑al+bm=n lσ(l) σ(m) with ab ≤ 9
- Regular Articles
- A study on soft rough semigroups and corresponding decision making applications
- Regular Articles
- Some new inequalities of Hermite-Hadamard type for s-convex functions with applications
- Regular Articles
- Deficiency of forests
- Regular Articles
- Perfect codes in power graphs of finite groups
- Regular Articles
- A new compact finite difference quasilinearization method for nonlinear evolution partial differential equations
- Regular Articles
- Does any convex quadrilateral have circumscribed ellipses?
- Regular Articles
- The dynamic of a Lie group endomorphism
- Regular Articles
- On pairs of equations in unlike powers of primes and powers of 2
- Regular Articles
- Differential subordination and convexity criteria of integral operators
- Regular Articles
- Quantitative relations between short intervals and exceptional sets of cubic Waring-Goldbach problem
- Regular Articles
- On θ-commutators and the corresponding non-commuting graphs
- Regular Articles
- Quasi-maximum likelihood estimator of Laplace (1, 1) for GARCH models
- Regular Articles
- Multiple and sign-changing solutions for discrete Robin boundary value problem with parameter dependence
- Regular Articles
- Fundamental relation on m-idempotent hyperrings
- Regular Articles
- A novel recursive method to reconstruct multivariate functions on the unit cube
- Regular Articles
- Nabla inequalities and permanence for a logistic integrodifferential equation on time scales
- Regular Articles
- Enumeration of spanning trees in the sequence of Dürer graphs
- Regular Articles
- Quotient of information matrices in comparison of linear experiments for quadratic estimation
- Regular Articles
- Fourier series of functions involving higher-order ordered Bell polynomials
- Regular Articles
- Simple modules over Auslander regular rings
- Regular Articles
- Weighted multilinear p-adic Hardy operators and commutators
- Regular Articles
- Guaranteed cost finite-time control of positive switched nonlinear systems with D-perturbation
- Regular Articles
- A modified quasi-boundary value method for an abstract ill-posed biparabolic problem
- Regular Articles
- Extended Riemann-Liouville type fractional derivative operator with applications
- Topical Issue on Topological and Algebraic Genericity in Infinite Dimensional Spaces
- The algebraic size of the family of injective operators
- Topical Issue on Topological and Algebraic Genericity in Infinite Dimensional Spaces
- The history of a general criterium on spaceability
- Topical Issue on Topological and Algebraic Genericity in Infinite Dimensional Spaces
- On sequences not enjoying Schur’s property
- Topical Issue on Topological and Algebraic Genericity in Infinite Dimensional Spaces
- A hierarchy in the family of real surjective functions
- Topical Issue on Topological and Algebraic Genericity in Infinite Dimensional Spaces
- Dynamics of multivalued linear operators
- Topical Issue on Topological and Algebraic Genericity in Infinite Dimensional Spaces
- Linear dynamics of semigroups generated by differential operators
- Special Issue on Recent Developments in Differential Equations
- Isomorphism theorems for some parabolic initial-boundary value problems in Hörmander spaces
- Special Issue on Recent Developments in Differential Equations
- Determination of a diffusion coefficient in a quasilinear parabolic equation
- Special Issue on Recent Developments in Differential Equations
- Homogeneous two-point problem for PDE of the second order in time variable and infinite order in spatial variables
- Special Issue on Recent Developments in Differential Equations
- A nonlinear plate control without linearization
- Special Issue on Recent Developments in Differential Equations
- Reduction of a Schwartz-type boundary value problem for biharmonic monogenic functions to Fredholm integral equations
- Special Issue on Recent Developments in Differential Equations
- Inverse problem for a physiologically structured population model with variable-effort harvesting
- Special Issue on Recent Developments in Differential Equations
- Existence of solutions for delay evolution equations with nonlocal conditions
- Special Issue on Recent Developments in Differential Equations
- Comments on behaviour of solutions of elliptic quasi-linear problems in a neighbourhood of boundary singularities
- Special Issue on Recent Developments in Differential Equations
- Coupled fixed point theorems in complete metric spaces endowed with a directed graph and application
- Special Issue on Recent Developments in Differential Equations
- Existence of entropy solutions for nonlinear elliptic degenerate anisotropic equations
- Special Issue on Recent Developments in Differential Equations
- Integro-differential systems with variable exponents of nonlinearity
- Special Issue on Recent Developments in Differential Equations
- Elliptic operators on refined Sobolev scales on vector bundles
- Special Issue on Recent Developments in Differential Equations
- Multiplicity solutions of a class fractional Schrödinger equations
- Special Issue on Recent Developments in Differential Equations
- Determining of right-hand side of higher order ultraparabolic equation
- Special Issue on Recent Developments in Differential Equations
- Asymptotic approximation for the solution to a semi-linear elliptic problem in a thin aneurysm-type domain
- Topical Issue on Metaheuristics - Methods and Applications
- Learnheuristics: hybridizing metaheuristics with machine learning for optimization with dynamic inputs
- Topical Issue on Metaheuristics - Methods and Applications
- Nature–inspired metaheuristic algorithms to find near–OGR sequences for WDM channel allocation and their performance comparison
- Topical Issue on Cyber-security Mathematics
- Monomial codes seen as invariant subspaces
- Topical Issue on Cyber-security Mathematics
- Expert knowledge and data analysis for detecting advanced persistent threats
- Topical Issue on Cyber-security Mathematics
- Feedback equivalence of convolutional codes over finite rings
Articles in the same Issue
- Regular Articles
- Integrals of Frullani type and the method of brackets
- Regular Articles
- Edge of chaos in reaction diffusion CNN model
- Regular Articles
- Calculus using proximities: a mathematical approach in which students can actually prove theorems
- Regular Articles
- An investigation on hyper S-posets over ordered semihypergroups
- Regular Articles
- The Leibniz algebras whose subalgebras are ideals
- Regular Articles
- Fixed point and multidimensional fixed point theorems with applications to nonlinear matrix equations in terms of weak altering distance functions
- Regular Articles
- Matrix rank and inertia formulas in the analysis of general linear models
- Regular Articles
- The hybrid power mean of quartic Gauss sums and Kloosterman sums
- Regular Articles
- Tauberian theorems for statistically (C,1,1) summable double sequences of fuzzy numbers
- Regular Articles
- Some properties of graded comultiplication modules
- Regular Articles
- The characterizations of upper approximation operators based on special coverings
- Regular Articles
- Bi-integrable and tri-integrable couplings of a soliton hierarchy associated with SO(4)
- Regular Articles
- Dynamics for a discrete competition and cooperation model of two enterprises with multiple delays and feedback controls
- Regular Articles
- A new view of relationship between atomic posets and complete (algebraic) lattices
- Regular Articles
- A class of extensions of Restricted (s, t)-Wythoff’s game
- Regular Articles
- New bounds for the minimum eigenvalue of 𝓜-tensors
- Regular Articles
- Shintani and Shimura lifts of cusp forms on certain arithmetic groups and their applications
- Regular Articles
- Empirical likelihood for quantile regression models with response data missing at random
- Regular Articles
- Convex combination of analytic functions
- Regular Articles
- On the Yang-Baxter-like matrix equation for rank-two matrices
- Regular Articles
- Uniform topology on EQ-algebras
- Regular Articles
- Integrations on rings
- Regular Articles
- The quasilinear parabolic kirchhoff equation
- Regular Articles
- Avoiding rainbow 2-connected subgraphs
- Regular Articles
- On non-Hopfian groups of fractions
- Regular Articles
- Singularly perturbed hyperbolic problems on metric graphs: asymptotics of solutions
- Regular Articles
- Rings in which elements are the sum of a nilpotent and a root of a fixed polynomial that commute
- Regular Articles
- Superstability of functional equations related to spherical functions
- Regular Articles
- Evaluation of the convolution sum involving the sum of divisors function for 22, 44 and 52
- Regular Articles
- Weighted minimal translation surfaces in the Galilean space with density
- Regular Articles
- Complete convergence for weighted sums of pairwise independent random variables
- Regular Articles
- Binomials transformation formulae for scaled Fibonacci numbers
- Regular Articles
- Growth functions for some uniformly amenable groups
- Regular Articles
- Hopf bifurcations in a three-species food chain system with multiple delays
- Regular Articles
- Oscillation and nonoscillation of half-linear Euler type differential equations with different periodic coefficients
- Regular Articles
- Osculating curves in 4-dimensional semi-Euclidean space with index 2
- Regular Articles
- Some new facts about group 𝒢 generated by the family of convergent permutations
- Regular Articles
- lnfinitely many solutions for fractional Schrödinger equations with perturbation via variational methods
- Regular Articles
- Supersolvable orders and inductively free arrangements
- Regular Articles
- Asymptotically almost automorphic solutions of differential equations with piecewise constant argument
- Regular Articles
- Finite groups whose all second maximal subgroups are cyclic
- Regular Articles
- Semilinear systems with a multi-valued nonlinear term
- Regular Articles
- Positive solutions for Hadamard differential systems with fractional integral conditions on an unbounded domain
- Regular Articles
- Calibration and simulation of Heston model
- Regular Articles
- One kind sixth power mean of the three-term exponential sums
- Regular Articles
- Cyclic pairs and common best proximity points in uniformly convex Banach spaces
- Regular Articles
- The uniqueness of meromorphic functions in k-punctured complex plane
- Regular Articles
- Normalizers of intermediate congruence subgroups of the Hecke subgroups
- Regular Articles
- The hyperbolicity constant of infinite circulant graphs
- Regular Articles
- Scott convergence and fuzzy Scott topology on L-posets
- Regular Articles
- One sided strong laws for random variables with infinite mean
- Regular Articles
- The join of split graphs whose completely regular endomorphisms form a monoid
- Regular Articles
- A new branch and bound algorithm for minimax ratios problems
- Regular Articles
- Upper bound estimate of incomplete Cochrane sum
- Regular Articles
- Value distributions of solutions to complex linear differential equations in angular domains
- Regular Articles
- The nonlinear diffusion equation of the ideal barotropic gas through a porous medium
- Regular Articles
- The Sheffer stroke operation reducts of basic algebras
- Regular Articles
- Extensions and improvements of Sherman’s and related inequalities for n-convex functions
- Regular Articles
- Classification lattices are geometric for complete atomistic lattices
- Regular Articles
- Possible numbers of x’s in an {x, y}-matrix with a given rank
- Regular Articles
- New error bounds for linear complementarity problems of weakly chained diagonally dominant B-matrices
- Regular Articles
- Boundedness of vector-valued B-singular integral operators in Lebesgue spaces
- Regular Articles
- On the Golomb’s conjecture and Lehmer’s numbers
- Regular Articles
- Some applications of the Archimedean copulas in the proof of the almost sure central limit theorem for ordinary maxima
- Regular Articles
- Dual-stage adaptive finite-time modified function projective multi-lag combined synchronization for multiple uncertain chaotic systems
- Regular Articles
- Corrigendum to: Dual-stage adaptive finite-time modified function projective multi-lag combined synchronization for multiple uncertain chaotic systems
- Regular Articles
- Convergence and stability of generalized φ-weak contraction mapping in CAT(0) spaces
- Regular Articles
- Triple solutions for a Dirichlet boundary value problem involving a perturbed discrete p(k)-Laplacian operator
- Regular Articles
- OD-characterization of alternating groups Ap+d
- Regular Articles
- On Jordan mappings of inverse semirings
- Regular Articles
- On generalized Ehresmann semigroups
- Regular Articles
- On topological properties of spaces obtained by the double band matrix
- Regular Articles
- Representing derivatives of Chebyshev polynomials by Chebyshev polynomials and related questions
- Regular Articles
- Chain conditions on composite Hurwitz series rings
- Regular Articles
- Coloring subgraphs with restricted amounts of hues
- Regular Articles
- An extension of the method of brackets. Part 1
- Regular Articles
- Branch-delete-bound algorithm for globally solving quadratically constrained quadratic programs
- Regular Articles
- Strong edge geodetic problem in networks
- Regular Articles
- Ricci solitons on almost Kenmotsu 3-manifolds
- Regular Articles
- Uniqueness of meromorphic functions sharing two finite sets
- Regular Articles
- On the fourth-order linear recurrence formula related to classical Gauss sums
- Regular Articles
- Dynamical behavior for a stochastic two-species competitive model
- Regular Articles
- Two new eigenvalue localization sets for tensors and theirs applications
- Regular Articles
- κ-strong sequences and the existence of generalized independent families
- Regular Articles
-
Commutators of Littlewood-Paley
- Regular Articles
- On decompositions of estimators under a general linear model with partial parameter restrictions
- Regular Articles
- Groups and monoids of Pythagorean triples connected to conics
- Regular Articles
- Hom-Lie superalgebra structures on exceptional simple Lie superalgebras of vector fields
- Regular Articles
- Numerical methods for the multiplicative partial differential equations
- Regular Articles
-
Solvable Leibniz algebras with NFn⊕
- Regular Articles
- Evaluation of the convolution sums ∑al+bm=n lσ(l) σ(m) with ab ≤ 9
- Regular Articles
- A study on soft rough semigroups and corresponding decision making applications
- Regular Articles
- Some new inequalities of Hermite-Hadamard type for s-convex functions with applications
- Regular Articles
- Deficiency of forests
- Regular Articles
- Perfect codes in power graphs of finite groups
- Regular Articles
- A new compact finite difference quasilinearization method for nonlinear evolution partial differential equations
- Regular Articles
- Does any convex quadrilateral have circumscribed ellipses?
- Regular Articles
- The dynamic of a Lie group endomorphism
- Regular Articles
- On pairs of equations in unlike powers of primes and powers of 2
- Regular Articles
- Differential subordination and convexity criteria of integral operators
- Regular Articles
- Quantitative relations between short intervals and exceptional sets of cubic Waring-Goldbach problem
- Regular Articles
- On θ-commutators and the corresponding non-commuting graphs
- Regular Articles
- Quasi-maximum likelihood estimator of Laplace (1, 1) for GARCH models
- Regular Articles
- Multiple and sign-changing solutions for discrete Robin boundary value problem with parameter dependence
- Regular Articles
- Fundamental relation on m-idempotent hyperrings
- Regular Articles
- A novel recursive method to reconstruct multivariate functions on the unit cube
- Regular Articles
- Nabla inequalities and permanence for a logistic integrodifferential equation on time scales
- Regular Articles
- Enumeration of spanning trees in the sequence of Dürer graphs
- Regular Articles
- Quotient of information matrices in comparison of linear experiments for quadratic estimation
- Regular Articles
- Fourier series of functions involving higher-order ordered Bell polynomials
- Regular Articles
- Simple modules over Auslander regular rings
- Regular Articles
- Weighted multilinear p-adic Hardy operators and commutators
- Regular Articles
- Guaranteed cost finite-time control of positive switched nonlinear systems with D-perturbation
- Regular Articles
- A modified quasi-boundary value method for an abstract ill-posed biparabolic problem
- Regular Articles
- Extended Riemann-Liouville type fractional derivative operator with applications
- Topical Issue on Topological and Algebraic Genericity in Infinite Dimensional Spaces
- The algebraic size of the family of injective operators
- Topical Issue on Topological and Algebraic Genericity in Infinite Dimensional Spaces
- The history of a general criterium on spaceability
- Topical Issue on Topological and Algebraic Genericity in Infinite Dimensional Spaces
- On sequences not enjoying Schur’s property
- Topical Issue on Topological and Algebraic Genericity in Infinite Dimensional Spaces
- A hierarchy in the family of real surjective functions
- Topical Issue on Topological and Algebraic Genericity in Infinite Dimensional Spaces
- Dynamics of multivalued linear operators
- Topical Issue on Topological and Algebraic Genericity in Infinite Dimensional Spaces
- Linear dynamics of semigroups generated by differential operators
- Special Issue on Recent Developments in Differential Equations
- Isomorphism theorems for some parabolic initial-boundary value problems in Hörmander spaces
- Special Issue on Recent Developments in Differential Equations
- Determination of a diffusion coefficient in a quasilinear parabolic equation
- Special Issue on Recent Developments in Differential Equations
- Homogeneous two-point problem for PDE of the second order in time variable and infinite order in spatial variables
- Special Issue on Recent Developments in Differential Equations
- A nonlinear plate control without linearization
- Special Issue on Recent Developments in Differential Equations
- Reduction of a Schwartz-type boundary value problem for biharmonic monogenic functions to Fredholm integral equations
- Special Issue on Recent Developments in Differential Equations
- Inverse problem for a physiologically structured population model with variable-effort harvesting
- Special Issue on Recent Developments in Differential Equations
- Existence of solutions for delay evolution equations with nonlocal conditions
- Special Issue on Recent Developments in Differential Equations
- Comments on behaviour of solutions of elliptic quasi-linear problems in a neighbourhood of boundary singularities
- Special Issue on Recent Developments in Differential Equations
- Coupled fixed point theorems in complete metric spaces endowed with a directed graph and application
- Special Issue on Recent Developments in Differential Equations
- Existence of entropy solutions for nonlinear elliptic degenerate anisotropic equations
- Special Issue on Recent Developments in Differential Equations
- Integro-differential systems with variable exponents of nonlinearity
- Special Issue on Recent Developments in Differential Equations
- Elliptic operators on refined Sobolev scales on vector bundles
- Special Issue on Recent Developments in Differential Equations
- Multiplicity solutions of a class fractional Schrödinger equations
- Special Issue on Recent Developments in Differential Equations
- Determining of right-hand side of higher order ultraparabolic equation
- Special Issue on Recent Developments in Differential Equations
- Asymptotic approximation for the solution to a semi-linear elliptic problem in a thin aneurysm-type domain
- Topical Issue on Metaheuristics - Methods and Applications
- Learnheuristics: hybridizing metaheuristics with machine learning for optimization with dynamic inputs
- Topical Issue on Metaheuristics - Methods and Applications
- Nature–inspired metaheuristic algorithms to find near–OGR sequences for WDM channel allocation and their performance comparison
- Topical Issue on Cyber-security Mathematics
- Monomial codes seen as invariant subspaces
- Topical Issue on Cyber-security Mathematics
- Expert knowledge and data analysis for detecting advanced persistent threats
- Topical Issue on Cyber-security Mathematics
- Feedback equivalence of convolutional codes over finite rings