Machine Learning in Transmission Design
-
Florian Oberneder
Florian Oberneder, M. Sc., studierte bis 2020 an der Technischen Hochschule in Deggendorf im Bachelorstudiengang Maschinenbau. Anschließend studierte er an der Technischen Universität München im Master Maschinenwesen und Master Automotive Engineering. Im Wintersemester 2021 absolvierte er ein Auslandssemester an der University of California San Diego. Seit dem Abschluss der beiden Studiengänge 2022 arbeitet er als Wissenschaftlicher Mitarbeiter an der Forschungsstelle für Zahnräder und Getriebesysteme (FZG).
 ,
Michael Otto
,
Michael Otto
Dr.-Ing. Michael Otto studierte Maschinenbau an der TU München mit dem Abschluss zum Diplom-Ingenieur 2000. Anschließend promovierte er dort im Jahr 2009 an der Forschungsstelle für Zahnräder und Getriebesysteme (FZG). Seit 2006 ist er Abteilungsleiter für die Berechnung und Verifikation von Getriebesystemen an der Forschungsstelle für Zahnräder und Getriebesysteme (FZG).
Univ. Prof. Dr.-Ing. Karsten Stahl studierte Maschinenbau an der TU München und promovierte dort im Jahr 2001 an der Forschungsstelle für Zahnräder und Getriebesysteme (FZG). Anschließend war er bis 2010 bei BMW tätig, in Dingolfing, Oxford und München. Seit 2011 ist er Ordinarius des Lehrstuhls für Maschinenelemente der TU München und Leiter der Forschungsstelle für Zahnräder und Getriebesysteme (FZG).

Abstract
In the design process of gear systems, various computational tools are used to optimize the operational behavior. Due to time constraints, the initial stages of development typically assume ideal, deviation-free gear geometries. However, deviations resulting from manufacturing significantly affect performance in later applications. This publication presents a concept to incorporate the influence of manufacturing tolerances during early development phases systematically. Based on an initial set of detailed simulations, a surrogate model is developed and trained. This model can quickly generate a wide range of results, efficiently accounting for the large variance of deviations. The shown approach combines the advantages of detailed simulations with the speed of machine learning models.
Abstract
Im Entwurfsprozess von Getriebesystemen werden verschiedene Rechenwerkzeuge eingesetzt, um das Betriebsverhalten zu optimieren. Aus Zeitgründen wird in den ersten Entwicklungsstadien typischerweise von idealen, abweichungsfreien Zahnradgeometrien ausgegangen. Allerdings beeinträchtigen fertigungsbedingte Abweichungen die Leistung in späteren Anwendungen erheblich. In dieser Veröffentlichung wird ein Konzept vorgestellt, um den Einfluss von Fertigungstoleranzen in frühen Entwicklungsphasen systematisch zu berücksichtigen. Basierend auf einem ersten Satz detaillierter Simulationen wird ein Ersatzmodell entwickelt und trainiert. Dieses Modell kann schnell eine Vielzahl von Ergebnissen generieren und die große Varianz der Abweichungen effizient berücksichtigen. Der gezeigte Ansatz kombiniert die Vorteile detaillierter Simulationen mit der Geschwindigkeit maschineller Lernmodelle.
Introduction
Manufacturing tolerances significantly influence both the economy of production and the properties of the built system. Due to its complex structure and the large number of possible combinations, it is difficult to systematically consider the manufacturing tolerances of a transmission system in the early design phase. This paper presents a systematic approach to incorporating the influence of manufacturing tolerances during the early development phase.
State of the Art
The design process for gears usually consists of several development steps, which are completed iteratively. The typical gear design process is shown in Figure 1 [1]. Starting with the definition of the requirements at the system level, the level of detail is gradually increased. The transmission design requirements relate to load-carrying capacity, efficiency, and dynamic behavior. The goals of these individual areas conflict with one another. A high gearing efficiency usually results in poor dynamic behavior and vice versa. A compromise must, therefore, always be made in the design process. The requirements are transferred from the conceptual design to the design of the micro geometry of the gearing.

Gear Design Process
Various expert programs are available for the individual design steps. The deformation of the transmission systems can be calculated, for instance, with the FVA software RIKOR. The approach for this calculation is based on a linear equation system [2, 3]. Every single element (gears, shaft, bearing) is represented by its stiffness matrix. The existing approach also allows FEM housing stiffnesses to be taken into account [4].
The entire system, including gears, shafts, bearings, and housing, is mapped in the software to determine the transmission properties. Deviations from individual tolerance features can be introduced and taken into account, allowing a particular case to be calculated very precisely. However, due to the large number of possible combinations of the deviations, the variance of deviations can only be mapped with increased time expenditure. Machine learning methods can be used to achieve meaningful results in the shortest possible time during the operational design.
According to Russel/Stuart [5], a clear definition of artificial intelligence (AI) is complex. There are various aspects in different definitions, some of which define the opposite. This publication uses a definition of Greiner et al. [6]. They describe AI as human-like intelligence and, thus, the ability to identify problems, make decisions, and act accordingly. Machine learning is a subfield of artificial intelligence. It can be divided into different learning methods (e. g., supervised learning), which use algorithms to convert features (input data) into targets (output data). In supervised learning, features and targets are present in the training data set.[6]
Sendlbeck et al. [7] describe actual challenges and potentials for using machine learning tools in the gearbox design process. Graph grammars could be used to automate the transmission topology selection with a small computational effort. Knowledge-based engineering (KBE) can be used in areas where little expert knowledge is required. For example, using KBE can quickly create a basic approach, which experts can further detail. Combined with graph neural networks (GNN), these two methods could help further automate and improve the gearbox design process.
Another way to shorten the development time of transmissions with the help of machine learning is the use of surrogate models (SM). For this, a detailed calculation model is used as the basis, mapped in a defined parameter space by a fast-calculating surrogate model. According to Forrester et al. [8], developing surrogate models can be defined in the steps: sample generation, data collection & processing, setup & training and validation & deployment of the model. Several methods for designing and analyzing computer experiments (DACE) are available for data sampling [9, 10]. According to McKay et al. [11], a Latin-hypercube design (LHD) can be used for generating sample parameter values for a multidimensional parameter space. The LHD ensures that each parameter is sampled across its entire range, providing a more comprehensive exploration of the parameter space. Together with the MaxiMin distance criterion after Johnson et al. [12], it ensures that the parameter space is covered as completely as possible.
Various options are available for the design of the surrogate model. A straightforward approach is Polynomial regression, which is easy to implement but may not be able to map complex relationships. With a high polynomial degree, the model tends to overfit [13]. In contrast, support vector regression models tend to be more robust against overfitting, especially in high-dimensional space. Different approaches for linear and non-linear problems are available [14]. Gaussian process offers more flexible models that can also be used for more complex relationships. The method belongs to the probabilistic models and provides a probability range as output, with which a value is predicted [15]. The choice of the so-called kernel functions is essential for the quality of the model [16]. Neural network methods offer great flexibility and can describe problems of any complexity. They require a huge amount of data to be able to describe the model very well. The choice of input parameters is critical here [17].
Hoffer et al. [18] show the application of surrogate models for structural FEM problems. They compare six different machine learning models as a mesh-free structural calculation. Depending on the application example, the models show various levels of agreement for validation. Schneider et al. [19] conduct similar investigations. They predict the thermomechanical behavior of wet clutches and compare various available surrogate models (Linear Regression, Decision Trees, Random Forest, Support Vector regression, Gaussian processes, and Neural Networks). The design with the neural network shows the best result but requires the most data for the training.
Methods and Results
This paper presents a procedure that combines the precise RIKOR calculation with the approach of a fast prediction surrogate model. This procedure can be described in several steps:
Definition of requirements and variation parameters in RIKOR,
Analysis of the gearbox system and initial sampling of the input data,
Setup and first training of the surrogate model,
Active sampling and retraining of the surrogate model and
Application in the design process.
The individual steps are explained in more detail in the following section.
Definition of Requirements
In the first step, input and output parameters have to be specified. The software defines the transmission system by various blocks for each system element (gears, shafts, bearings). For a gear, for example, the number of teeth, the pressure angle, the normal module, and further parameters must be specified. Exemplary parameters for a shaft are the geometric dimensions and possible external torques and speeds. The application area should be limited to make the surrogate model manageable. For this, the selected area of application should have the same general characteristics (e. g., limitation to transmissions for electric vehicles with the same transmission topology). The general application parameters (e. g., number of teeth, normal module, etc.) of the transmission system can be varied within this application range.
Next to these parameters, the variation of the parameters representing the manufacturing deviations has to be defined. For this purpose, a classification by Weitl [20] is used, which divides manufacturing deviations into internal and external deviations. Internal deviations are discrete for each tooth of a gear. The tolerance range is defined in DIN ISO 1328-1 [21]. In contrast, external deviations are discrete per gear stage. They present deviations in the transmission system. In Table 1 different possible deviation parameters are defined.
In addition to the input variables, representative values as an output of the detailed calculation are specified. At least one set of parameters should be available to assess the dynamic behavior, the load-carrying capacity, and the efficiency to determine the transmission properties as best as possible.
Possible variation parameters
 |
Analysis of the Gearbox System and Initial Sampling of the Input Data
The next step is to cover a parameter space by repeatedly calculating the model of the detailed software. First, a random sample of the input vector x is set up. Various methods of the design and analysis of computer experiments (DACE) are available for this step. Here, a Latin-hypercube design (LHD) is used as an example to generate possible random values of the defined input variables. The procedure can be seen in Figure 2.

Initial data generation
In the initial step, a dataset (x, y) is generated with the detailed model in RIKOR. Other calculation software whose internal calculation processes are not known could be used instead of RIKOR (black box system). The input vectors x and y are linked to the output vector y and stored as a dataset (x, y). This dataset can be used to set up and train a surrogate model that matches the input and output.
Setup and First Training of the Surrogate Model
As described, various methods are conceivable for the surrogate model. After defining the architecture of the surrogate model, the model can be trained with the initial dataset. A supervised learning approach is used for this step. The dataset has to be divided into training data and validation data. Next, the model’s performance is evaluated using the test data.
Figure 3 shows the procedure for using the surrogate model. The surrogate model quickly predicts the result of any input x. After the prediction, the system checks whether the generated output is within the model’s validity range. A confidence variable must be defined for this purpose. If the output is within the predefined confidence interval of the model, the output can be used directly. If the predicted output is outside the confidence interval, a calculation is triggered using the detailed calculation software. In this case, the calculation result of the detailed software is directly used as the output. It is also saved in the database to achieve better significance for future calculations with similar input parameters. With the extended database, the surrogate model can then be further trained and thus be improved.

Procedure for using the surrogate model
Active Sampling and Retraining of the Surrogate Model
Active learning methods can be used for improving the surrogate model. The procedure is described in Figure 4.
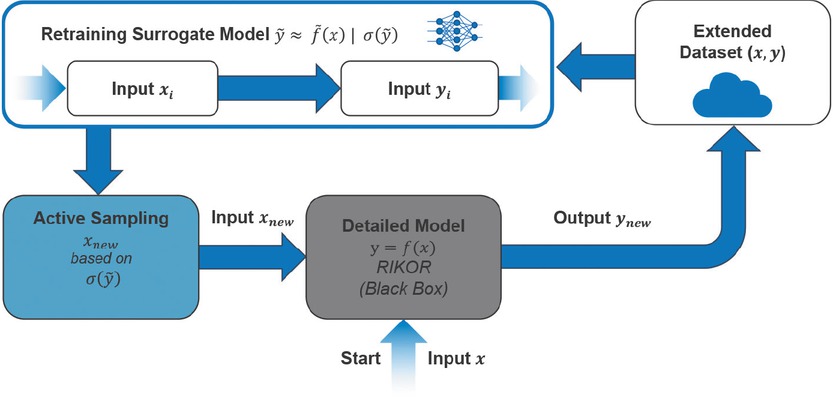
Active Learning of the surrogate model
Active learning deliberately targets areas in the current surrogate model less well. For this, an input vector is generated in an area with high uncertainty and low mapping quality. Similar to the previous step, the detailed software starts an exact calculation. The result is saved in the dataset and then used to retrain the surrogate model. The additional data enables the surrogate model to cover the area better and a new input is sought where the model does not have a good mapping quality. The process can be restarted with this input.
Application in the Design Process
The finished and trained model can now be integrated directly into the gearbox design process. Figure 5 shows a possible combination of the fast-prediction surrogate model with the detailed calculation.

Gear design process with surrogate model
If a new gearbox is designed, both the detailed model and the surrogate model are used, thus combining the advantages of both models. To take manufacturing tolerances into account in the early development phase, a standard deviation of the tolerance characteristics under consideration must be entered as input in addition to the ideal values as mean values. The mean values of the distributions are used to calculate and determine the perfect value of the characteristics via the detailed calculation program. In contrast, the surrogate model takes into account the probability distributions. The fast prediction model allows several combinations of distributions to be calculated within a very short time. In addition to the exact calculation value, a variance of the parameter under consideration is thus available to the user as an output via the surrogate model.
Conclusion
With the shown procedure, it is possible to take manufacturing tolerances into account in the early design phase. The concept presented offers the following potential advantages:
The previous method‘s accuracy remains the same, as the mean value is still calculated by the detailed calculation program.
The surrogate model efficiently expands the design by considering the distribution functions.
Important influences of manufacturing tolerances can be identified at an early development stage.
Variables that show a lower variance can be provided with a larger tolerance.
AI methods can save costs and resources by taking manufacturing tolerances into account at an early stage, ensuring more sustainable production.
Note
This article is peer reviewed by the members of the ZWF Special Issue Advisory Board.
About the authors
Florian Oberneder, M. Sc., studierte bis 2020 an der Technischen Hochschule in Deggendorf im Bachelorstudiengang Maschinenbau. Anschließend studierte er an der Technischen Universität München im Master Maschinenwesen und Master Automotive Engineering. Im Wintersemester 2021 absolvierte er ein Auslandssemester an der University of California San Diego. Seit dem Abschluss der beiden Studiengänge 2022 arbeitet er als Wissenschaftlicher Mitarbeiter an der Forschungsstelle für Zahnräder und Getriebesysteme (FZG).
Dr.-Ing. Michael Otto studierte Maschinenbau an der TU München mit dem Abschluss zum Diplom-Ingenieur 2000. Anschließend promovierte er dort im Jahr 2009 an der Forschungsstelle für Zahnräder und Getriebesysteme (FZG). Seit 2006 ist er Abteilungsleiter für die Berechnung und Verifikation von Getriebesystemen an der Forschungsstelle für Zahnräder und Getriebesysteme (FZG).
Univ. Prof. Dr.-Ing. Karsten Stahl studierte Maschinenbau an der TU München und promovierte dort im Jahr 2001 an der Forschungsstelle für Zahnräder und Getriebesysteme (FZG). Anschließend war er bis 2010 bei BMW tätig, in Dingolfing, Oxford und München. Seit 2011 ist er Ordinarius des Lehrstuhls für Maschinenelemente der TU München und Leiter der Forschungsstelle für Zahnräder und Getriebesysteme (FZG).
Literature
1 Klocke, F.; Brecher, C.: Zahnrad- und Getriebetechnik. Auslegung – Herstellung – Untersuchung – Simulation. Carl Hanser Verlag, München 2017 DOI:10.3139/9783446431409.fm10.3139/9783446431409.fmSearch in Google Scholar
2 Weinberger, U.; Otto, M.; Stahl, K.: Closed Form Calculation of Lead Flank Modification Proposal for Spur and Helical Gear Stages. In: ASME 2019 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference: Volume 10: 2019 International Power Transmission and Gearing Conference. American Society of Mechanical Engineers 2019 DOI:10.1115/DETC2019-9799310.1115/DETC2019-97993Search in Google Scholar
3 Hochrein, J.-F.; Otto, M.; Stahl, K.: Fast Tooth Deflection Calculation Method and its Validation. Forschung im Ingenieurwesen 86 (2022) 4, pp. 845-859 DOI:10.1007/s10010-022-00598-810.1007/s10010-022-00598-8Search in Google Scholar
4 Schweigert, D.; Weinberger, U.; Otto, M.; Stahl, K.: Advanced Method of Including Housing Stiffness into Calculation of Gear Systems. Forschung im Ingenieurwesen 86 (2022) 2, pp. 241–248 DOI:10.1007/s10010-022-00585-z10.1007/s10010-022-00585-zSearch in Google Scholar
5 Russell, S.; Norvig, P.: Artificial Intelligence. A Modern Approach. Pearson, Boston 2016.Search in Google Scholar
6 Greiner, R.; Berger, D.; Böck, M.: Analytics und Artificial Intelligence. Springer, Wiesbaden 2022 DOI:10.1007/978-3-658-38159-210.1007/978-3-658-38159-2Search in Google Scholar
7 Sendlbeck, S.; Maurer, M.; Otto, M.; Stahl, K.: Potentials and Challenges in Enhancing the Gear Transmission Development with Machine Learning Methods – a Review. Forschung im Ingenieurwesen 87 (2023) 10, pp. 1–14 DOI:10.1007/s10010-023-00699-y10.1007/s10010-023-00699-ySearch in Google Scholar
8 Forrester, A.; Sóbester, A.; Keane, A.: Engineering Design via Surrogate Modelling. Wiley 2008 DOI:10.1002/978047077080110.1002/9780470770801Search in Google Scholar
9 Dean, A.; Voss, D.; Draguljić, D.: Design and Analysis of Experiments. Springer International Publishing, Cham 2017 DOI:10.1007/978-3-319-52250-010.1007/978-3-319-52250-0Search in Google Scholar
10 Siebertz, K.; Bebber, D. van; Hochkirchen, T.: Statistische Versuchsplanung. Springer, Berlin, Heidelberg 2017 DOI:10.1007/978-3-662-55743-310.1007/978-3-662-55743-3Search in Google Scholar
11 McKay, M.; Beckman, R.; Conover, W.: A Comparison of Three Methods for Selecting Values of Input Variables in the Analysis of Output from a Computer Code. Technometrics 21 (1979) 2, pp. 239–245 DOI:10.1080/00401706.1979.1048975510.1080/00401706.1979.10489755Search in Google Scholar
12 Johnson, M.; Moore, L.; Ylvisaker, D.: Minimax and Maximin Distance Designs. Journal of Statistical Planning and Inference 26 (1990) 2, pp. 131–148 DOI:10.1016/0378-3758(90)90122-B10.1016/0378-3758(90)90122-BSearch in Google Scholar
13 Draper, N.: Applied Regression Analysis. John Wiley & Sons 1998 DOI:10.1002/978111862559010.1002/9781118625590Search in Google Scholar
14 Li, H.: Machine Learning Methods. Springer Nature, Singapore 2024 DOI:10.1007/978-981-99-3917-610.1007/978-981-99-3917-6Search in Google Scholar
15 Joshi, A.: Machine Learning and Artificial Intelligence. Springer, Cham 2020 DOI:10.1007/978-3-031-12282-810.1007/978-3-031-12282-8Search in Google Scholar
16 Rasmussen, C.: Gaussian Processes for Machine Learning: Adaptive Computation and Machine Learning. MIT Press, Cambridge, Mass. 2006 DOI: DOI:10.7551/mitpress/3206.001.000110.7551/mitpress/3206.001.0001Search in Google Scholar
17 Aggarwal, C.: Neural Networks and Deep Learning. A Textbook. Springer, Cham 2023 DOI:10.1007/978-3-031-29642-010.1007/978-3-031-29642-0Search in Google Scholar
18 Hoffer, J.; Geiger, B.; Ofner, P.; Kern, R.: Mesh-Free Surrogate Models for Structural Mechanic FEM Simulation: A Comparative Study of Approaches. Applied Sciences 11 (2021) 20 DOI:10.3390/app1120941110.3390/app11209411Search in Google Scholar
19 Schneider, T.; Bedrikow, A.; Stahl, K.: Enhanced Prediction of Thermomechanical Systems Using Machine Learning, PCA, and Finite Element Simulation. Advanced Modeling and Simulation in Engineering Sciences 11 (2024) 1 DOI:10.1186/s40323-024-00268-010.1186/s40323-024-00268-0Search in Google Scholar
20 Weitl, R.: Zur Tragfähigkeitsberechnung von Wälzlagern und Stirnrädern. Dissertation, München 2010Search in Google Scholar
21 DIN ISO 1328-1: Zylinderräder – ISO-Toleranzsystem – Teil 1: Definitionen und zulässige Werte für Abweichungen an Zahnflanken. 2018Search in Google Scholar
© 2025 Florian Oberneder, Michael Otto und Karsten Stahl, publiziert von De Gruyter
Dieses Werk ist lizensiert unter einer Creative Commons Namensnennung 4.0 International Lizenz.
Articles in the same Issue
- Grußwort
- Grußwort
- Inhalt
- Künstliche Intelligenz
- Künstliche Intelligenz (KI)
- Menschzentrierte Einführung von Künstlicher Intelligenz in Produktion und Engineering
- Generative AI and Agentic Architecture in Engineering and Manufacturing
- Intelligent Industry
- Von Piloten zu skalierbaren Lösungen
- KI in Engineering
- KI-Anwendungen im Engineering
- KI-Adaption in der Produktentwicklung
- KI-Transformation im Engineering
- Code the Product – Vision für die Produktentstehung der Zukunft
- Machine Learning in Transmission Design
- AI Enables Data-Driven Product Design
- Optimierung von Entwicklungsprozessen durch KI-gestütztes Generatives Engineering und Design
- Human-AI Teaming in a Digital Twin Model for Virtual Product Development
- Kundenorientierte Innovationspotenziale durch KI
- Scheitert Systems Engineering an seiner eigenen Komplexität?
- AI-Augmented Model-Based Systems Engineering
- Prompt Engineering im Systems Engineering
- Sustainable Product Development and Production with AI and Knowledge Graphs
- AI-Driven ERP Systems
- Optimale Produktion dank Künstlicher Intelligenz
- KI in PLM-Systemen
- KI in Produktion
- Durchblick in der Produktion
- Production of the Future
- Der Use-Case-First-Ansatz zum Einsatz von Künstlicher Intelligenz in der Produktion
- Überwindung der Programmierkluft in der Produktion und Fertigung
- Lean Data – Anwendungsspezifische Reduktion großer Datenmengen im Produktionsumfeld
- KI-Zuverlässigkeit in der Produktion
- KI in der Smart Factory: Warum Standardanwendungen besser sind
- Data-Driven Decision-Making: Leveraging Digital Twins for Reprocessing in the Circular Factory
- Extended Intelligence for Rapid Cognitive Reconfiguration
- Erfahrungsbasierte Bahnoptimierung von Montagerobotern mittels KI und Digitalen Zwillingen
- Integration of Machine Learning Methods to Calculate the Remaining Useful Life of Mandrels
- AI-Driven Load Sensing for Wind Turbine Operations
- ChatPLC – Potenziale der Generativen KI für die Steuerungsentwicklung
- Developing and Qualifying an ML Application for MRO Assistance
- Applying AI in Supporting Additive Manufacturing Machine Maintenance
- Kollaboratives Modelltraining und Datensicherheit
- KI-basierte Partikelgrößenbestimmung in Suspensionen
- Intelligente Prozessüberwachung für die flexible Produktion
- Robuste Bauteilidentifikation mittels digitaler Fingerabdrücke
- Herausforderungen der Digitalisierung in der Klebetechnik
- Vom Webshop zum Shopfloor
- Scoring-Prozess mit Vorhersagemodell
- Automatisierte Optimierung von Metamaterialien im Leichtbau
- KI-gestützte Prozessoptimierung in der Massivumformung
- AI-Supported Process Monitoring in Machining
- Federated Learning in der Arbeitsplanung
- KI in der Kommissionierung
- KI-basiertes Assistenzsystem zur Qualitätskontrolle
- Qualitätssteigerung durch Digitalisierung
- Qualitative und wirtschaftliche Vorteile des KI-gestützten 8D-Prozesses
- KI-gestützte Prognose von Durchlauf- und Lieferzeiten in der Einzel- und Kleinserienfertigung
Articles in the same Issue
- Grußwort
- Grußwort
- Inhalt
- Künstliche Intelligenz
- Künstliche Intelligenz (KI)
- Menschzentrierte Einführung von Künstlicher Intelligenz in Produktion und Engineering
- Generative AI and Agentic Architecture in Engineering and Manufacturing
- Intelligent Industry
- Von Piloten zu skalierbaren Lösungen
- KI in Engineering
- KI-Anwendungen im Engineering
- KI-Adaption in der Produktentwicklung
- KI-Transformation im Engineering
- Code the Product – Vision für die Produktentstehung der Zukunft
- Machine Learning in Transmission Design
- AI Enables Data-Driven Product Design
- Optimierung von Entwicklungsprozessen durch KI-gestütztes Generatives Engineering und Design
- Human-AI Teaming in a Digital Twin Model for Virtual Product Development
- Kundenorientierte Innovationspotenziale durch KI
- Scheitert Systems Engineering an seiner eigenen Komplexität?
- AI-Augmented Model-Based Systems Engineering
- Prompt Engineering im Systems Engineering
- Sustainable Product Development and Production with AI and Knowledge Graphs
- AI-Driven ERP Systems
- Optimale Produktion dank Künstlicher Intelligenz
- KI in PLM-Systemen
- KI in Produktion
- Durchblick in der Produktion
- Production of the Future
- Der Use-Case-First-Ansatz zum Einsatz von Künstlicher Intelligenz in der Produktion
- Überwindung der Programmierkluft in der Produktion und Fertigung
- Lean Data – Anwendungsspezifische Reduktion großer Datenmengen im Produktionsumfeld
- KI-Zuverlässigkeit in der Produktion
- KI in der Smart Factory: Warum Standardanwendungen besser sind
- Data-Driven Decision-Making: Leveraging Digital Twins for Reprocessing in the Circular Factory
- Extended Intelligence for Rapid Cognitive Reconfiguration
- Erfahrungsbasierte Bahnoptimierung von Montagerobotern mittels KI und Digitalen Zwillingen
- Integration of Machine Learning Methods to Calculate the Remaining Useful Life of Mandrels
- AI-Driven Load Sensing for Wind Turbine Operations
- ChatPLC – Potenziale der Generativen KI für die Steuerungsentwicklung
- Developing and Qualifying an ML Application for MRO Assistance
- Applying AI in Supporting Additive Manufacturing Machine Maintenance
- Kollaboratives Modelltraining und Datensicherheit
- KI-basierte Partikelgrößenbestimmung in Suspensionen
- Intelligente Prozessüberwachung für die flexible Produktion
- Robuste Bauteilidentifikation mittels digitaler Fingerabdrücke
- Herausforderungen der Digitalisierung in der Klebetechnik
- Vom Webshop zum Shopfloor
- Scoring-Prozess mit Vorhersagemodell
- Automatisierte Optimierung von Metamaterialien im Leichtbau
- KI-gestützte Prozessoptimierung in der Massivumformung
- AI-Supported Process Monitoring in Machining
- Federated Learning in der Arbeitsplanung
- KI in der Kommissionierung
- KI-basiertes Assistenzsystem zur Qualitätskontrolle
- Qualitätssteigerung durch Digitalisierung
- Qualitative und wirtschaftliche Vorteile des KI-gestützten 8D-Prozesses
- KI-gestützte Prognose von Durchlauf- und Lieferzeiten in der Einzel- und Kleinserienfertigung