Phase portraits of two classes of quadratic differential systems exhibiting as solutions two cubic algebraic curves
-
Rebiha Benterki
 and
Ahlam Belfar
and
Ahlam Belfar

Abstract
The classification of the phase portraits is one of the classical and difficult problems in the qualitative theory of polynomial differential systems in
1 Introduction and statement of the main results
A differential system on the plane is called a polynomial vector field if the following equations hold:
where
We define an algebraic invariant curve
where
The papers studying the QS have been extensively investigated, and the literature about them is abundant, see [2,3,4, 5,6]. The first articles came to light in 1960 interested in the classification of global dynamics of QS, the fact that these systems depend on 12 parameters made them difficult to study. For this reason, the authors studied and classified the global phase portraits of some particular classes of QS. The first class studied is the classification of quadratic centers and their first integrals, which began with the works of Dulac [7], Kapteyn [8,9], Bautin [10], Lunkevich and Sibirskii [11], Ye and Ye [12], Artès et al. [13]. For the class of the homogeneous quadratic systems, see for example the works of Lyagina [14], Sibirskii and Vulpe [15], and Newton [16].
Recently, Benterki and Llibre [17] classified the global dynamics of 14 QS exhibiting some relevant classical algebraic curves of degree 4 and provided 31 topologically different phase portraits in the Poincaré disc for these systems. In another study, Belfar and Benterki [18] classified the global dynamics of five QS with at most two parameters, exhibiting five well-known algebraic curves of degree three and proved that these systems exhibit 29 topologically different phase portraits.
This article is a continuation of the study done by Belfar and Benterki [18], where we classified the phase portraits in the Poincaré disk of two QS with at most four parameters, exhibiting two classical invariant algebraic curves of degree 3, and it is easily perceived that these differential systems possess 26 topologically non-equivalent phase portraits. More precisely, we analyze the quadratic differential systems having usual cubic invariant curves.
In the following theorem we present a normal form for any differential quadratic polynomial systems possessing Cubical Hyperbola or Semicubical Parabola invariant curves.
Theorem 1
The cubic algebraic curve Cubical Hyperbola
(2)The cubic algebraic curve Semicubical Parabola
(3)For more details about invariant cubic curves realizable by quadratic differential systems see [19].
Remark 2
Rather than studying the systems mentioned in Theorem 1 for all their parameter values, we restrict ourselves by carrying out the next symmetries.
Systems (2) are invariant over the change
Systems (3) are invariant over the change
The following theorem presents the geometric solutions of the two systems mentioned in Theorem 1.
Theorem 3
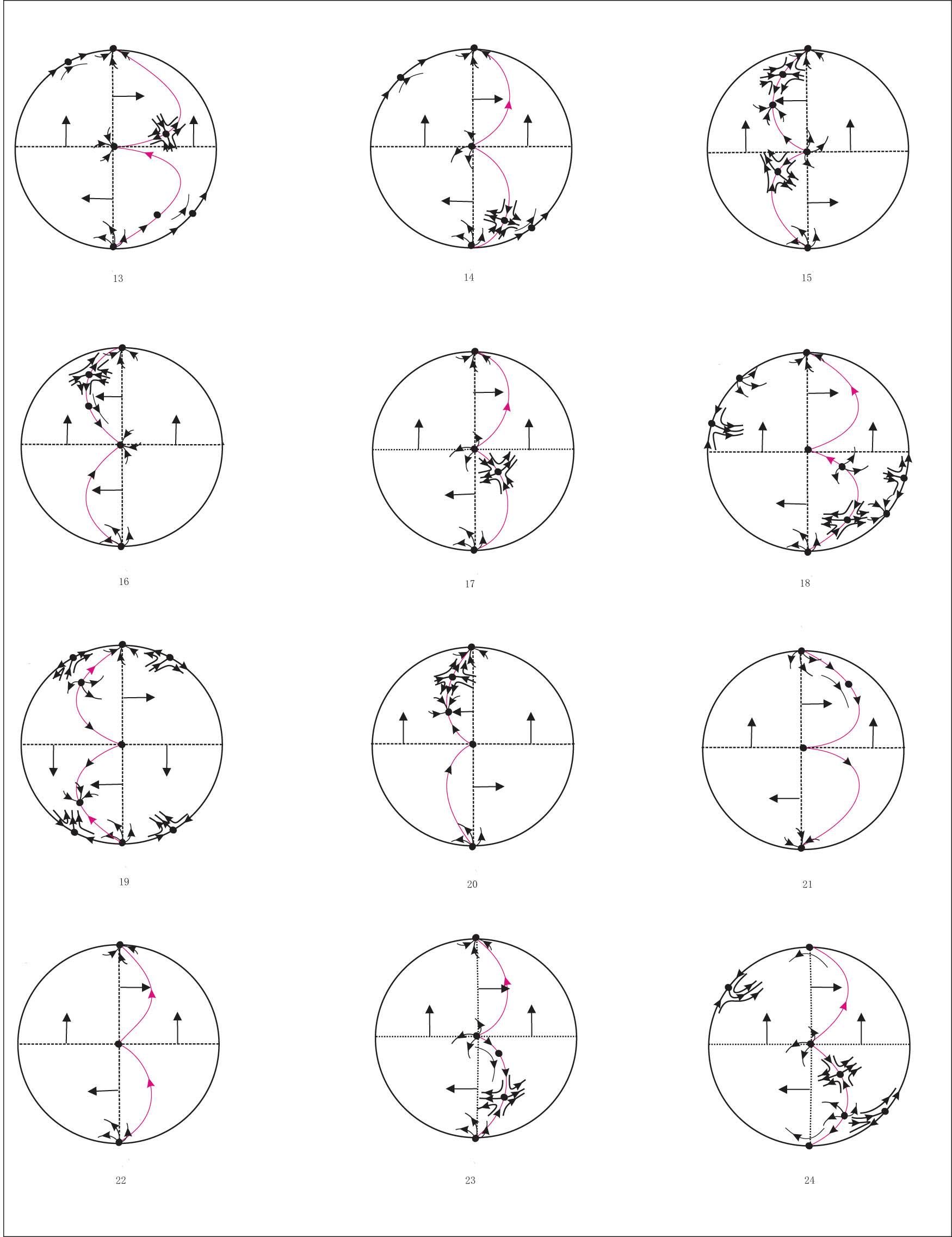
The global dynamics in the Poincaré disc of the two vector fields given in Theorem 1 are given in Figures 1–3. More precisely, we have the phase portrait
for systems (2) when
for systems (2) when
for systems (3) when
for systems (3) when
for systems (3) when
for systems (3) when
for systems (3) when
for systems (3) when
for systems (3) when
for systems (3) when
for systems (3) when
for systems (3) when
for systems (3) when
for systems (3) when
for systems (3) when
for systems (3) when
for systems (3) when
for systems (3) when
for systems (3) when
for systems (3) when
for systems (3) when
for systems (3) when
for systems (3) when
for systems (3) when
for systems (3) when
for systems (3) when
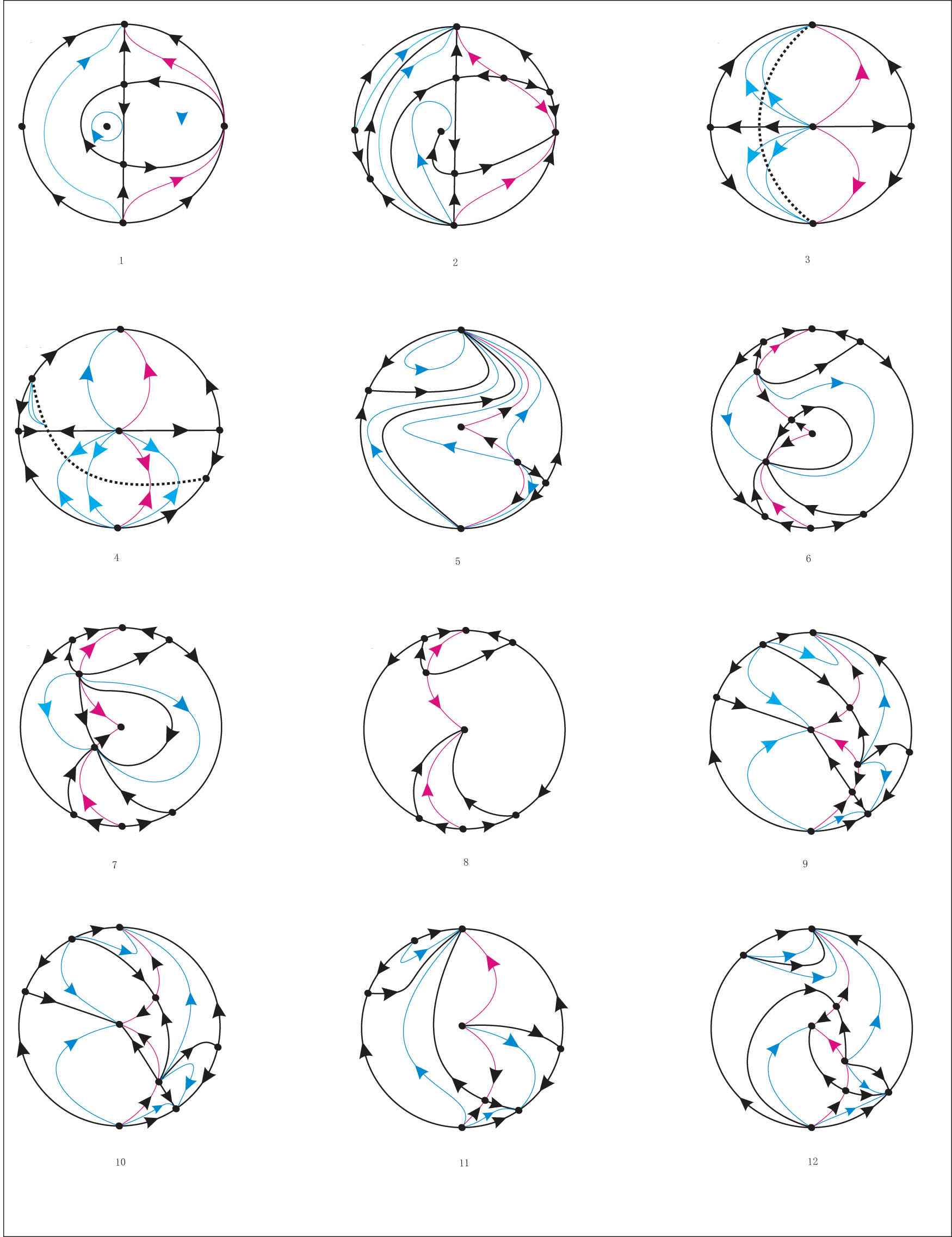

Continuation of Figure 1.
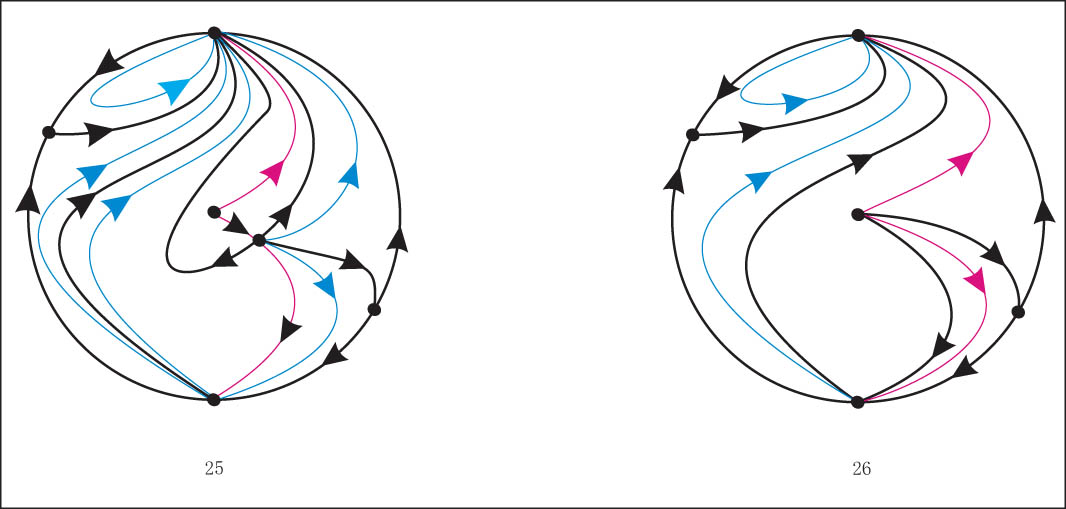
Continuation of Figure 1.
2 Preliminaries and fundamental results
In this section, we present some fundamental tools we need to analyze the behavior of the trajectories of planar vector fields.
2.1 Geometric solutions within the Poincaré disc
In this part, we present some fundamental findings that are essential for understanding how a planar polynomial differential system’s trajectories behave when it approaches infinity. Let
The equator
Since we need to do calculations on the Poincaré sphere, we consider the local charts
After a scaling of the independent variable in the local chart
in the local chart
and for the local chart
Note that for studying the singular points at infinity, we only need to study the infinite singular points of the chart
For more details on the Poincaré compactification, see Chapter 5 of [1].
An orbit that is a singular point, limit cycle, or a trajectory that lies in the boundary of a hyperbolic sector at a singular point is a separatrix of
Canonical regions of
The following result was achieved by Neumann [20], Markus [21], and Peixoto [22].
Theorem 4
The phase portraits in the Poincaré disc of the two compactified polynomial differential systems
Finally, for a precise definition of the index of singular points, see Chapter 6 of [1], but, for our intents, the next theorems known as the Poincaré formula give sufficient information about the subject. Then, to know the nature of a singular point, we can calculate its index, which is given in the following theorem.
Theorem 5
[Poincaré index formula] Let q be an isolated singular point having the finite sectorial decomposition property. Let e, h, and p denote the number of elliptic, hyperbolic, and parabolic sectors of q, respectively, and suppose that
Theorem 6
[Poincaré-Hopf theorem] For every tangent vector field on
3 Finite and infinite singularities
The singular points (or simply SP) of the two quadratic systems mentioned in Theorem 1 are given in the following proposition.
Proposition 7
The next assertions are valid for systems (2) and (3).
If
In
Assume
If
If
If
Assume
If
If
If
Assume
If
If
If
Assume
If
If
If
Assume
Assume
If
Assume
If
If
If
In
Assume
If
If
If
Assume
Assume
Proof
If
If
Systems (2) in
(4)These systems have two hyperbolic singularities if
If
(5)This system has one nilpotent singularity at
The expression of systems (2) in
(6)The origin is an equilibrium point of systems (6). The eigenvalues of its associated Jacobian matrix are
Now we are going to prove proposition 7 for the second statement.
Systems (3) in
Assume
If
If
(8)These systems have one semi-hyperbolic singularity at
If
The origin of these systems is an hyperbolic stable node having eigenvalues
For the finite SP of systems (3), we distinguish six cases.
If
The number of real solutions of this equation is determined by
By supposing
If
If
Now, if
If
For
Now, if
If
If
If
If
If
The number of real solutions of this equation is determined by
If
If
If
If
Now if
If
If
If
If
If
Assume
In
In
The origin of these systems is a stable node with eigenvalues
Assume
These systems have one hyperbolic saddle at
In
The origin of these systems is a nilpotent singular point with eigenvalues 0 and 0. By [1, Theorem 3.5], we obtain that its local phase portrait consists of two parabolic, two hyperbolic, and two elliptic sectors.
For the finite SP, systems (3) have further to the node at
If
If
If
Assume
In
These systems have one hyperbolic saddle at
In
The origin of these systems is a nilpotent SP with eigenvalues 0 and 0. By [1, Theorem 3.5], we know that its local phase portrait consists of two parabolic, two hyperbolic, and two elliptic sectors.
Assume
In
The differential systems (9) in
We do a change of variable
The origin of these systems is a stable node with eigenvalues
4 Local and global geometric solutions
If

If
According to statement (ii) of Proposition 7 when
Continuation of Figure 4.
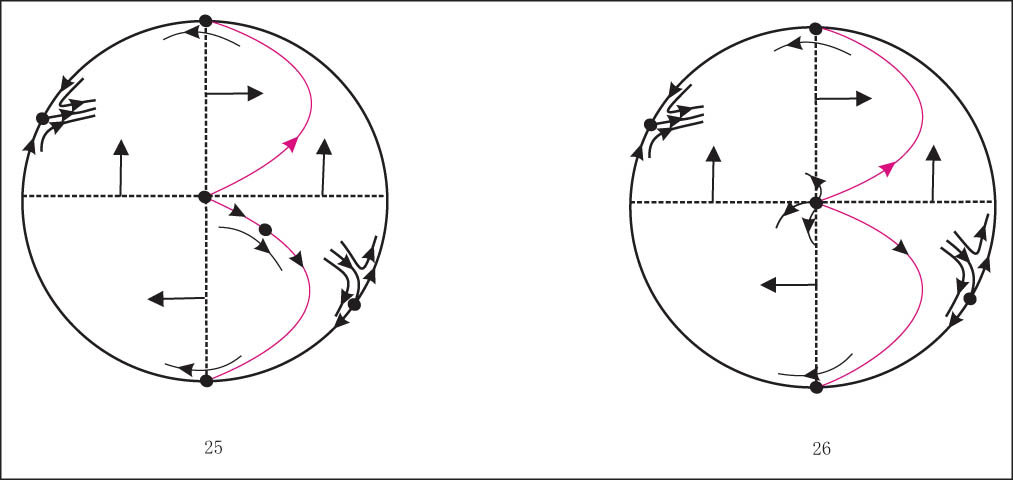
Continuation of Figure 4.
5 Conclusion
We classified the phase portraits in the Poincaré disk of two classes of quadratic systems. Our work is a continuation of the ones done in [18], in which the authors classified the phase portraits of four classes of quadratic differential systems with usual cubic invariant curves.
In this article, we analyzed two quadratic systems, the first with only one parameter, which provided six different phase portraits, and the second differential system with four parameters, and we proved by using the compactification of Poincaré that it has twenty topologically non-equivalent phase portraits.
Acknowledgements
The authors would like to express their gratitude to the managing editor and the referees for their interesting remarks and suggestions.
-
Funding information: The authors received no specific funding for this work.
-
Conflict of interest: The authors declare that there is no conflict of interest.
-
Data availability statement: The data sets analyzed during the current study are available from the corresponding author on reasonable request.
References
[1] F. Dumortier, J. Llibre, and J. C. Artés, Qualitative theory of planar differential systems, Springer-Verlag, Universitext (UTX), 2006, DOI: https://doi.org/10.1007/978-3-540-32902-2. 10.1007/978-3-540-32902-2Search in Google Scholar
[2] J.C. Artés and J. Llibre, Quadratic Hamiltonian vector fields, J. Differential Equations 107 (1994), no. 1, 80–95, DOI: https://doi.org/10.1006/jdeq.1994.1004. 10.1006/jdeq.1994.1004Search in Google Scholar
[3] J. C. Artés, J. Llibre, D. Schlomiuk, and N. Vulpe, Geometric Configurations of Singularities of Planar Polynomial Differential Systems, Birkhäuser Cham, Basel, 2021, DOI: https://doi.org/10.1007/978-3-030-50570-7. 10.1007/978-3-030-50570-7Search in Google Scholar
[4] A. Belfar and R. Benterki, Qualitative dynamics of quadratic systems exhibiting reducible invariant algebraic curve of degree 3, Palestine J. Math. 11 (2021), no. II, 1–12, https://pjm.ppu.edu. Search in Google Scholar
[5] A. Belfar and R. Benterki, Qualitative dynamics of quadratic polynomial differential system exhibiting an algebraic cubic first integral. Submitted (2022). Search in Google Scholar
[6] I. V. Nikolaev and N. Vulpe, Topological classification of quadratic systems with a unique finite second order singularity with two zero eigenvalues, Bul. Acad. ŞtiinÅče Repub. Mold Mat. 11 (1993), no. 1, 3–8. Search in Google Scholar
[7] H. Dulac, Détermination et integration d’une certaine classe d’équations différentielle ayant par point singulier un centre, Bull. Sci. Math. Sér. (2) 32 (1908), 230–252. Search in Google Scholar
[8] W. Kapteyn, On the midpoints of integral curves of differential equations of the first degree (Dutch), Nederl. Akad. Wetensch. Verslag. Afd. Natuurk. Konikl. Nederland. 19 (1911), 1446–1457. Search in Google Scholar
[9] W. Kapteyn, New investigations on the midpoints of integrals of differential equations of the first degree, (Dutch) Nederl. Akad. Wetensch. Verslag. Afd. Natuurk. Konikl. Nederland. 20 (1912), 1354–1365, 21 (1013), 27–33. Search in Google Scholar
[10] N. N. Bautin, On the number of limit cycles which appear with the variation of coefficients from an equilibrium position of focus or center type, Mat. Sbornik. 30 (1952), 181–196. Amer. Math. Soc. Transl. 72 (1954), 1–19. Search in Google Scholar
[11] V. A. Lunkevich and K. S. Sibirskii, Integrals of a general quadratic differential system in cases of a center, Differential Equations 18 (1982), no. 5, 563–568, www.mathnet.ru/eng/de/v18/i5/p786. Search in Google Scholar
[12] W. Y. Ye and Y. Q. Ye, On the conditions of a center and general integrals of quadratic differential systems, Acta Math. Sin., Engl. Ser. 17 (2001), no. 2, 229–236, DOI: https://doi.org/10.1007/s101140100114. 10.1007/s101140100114Search in Google Scholar
[13] J. C. Artés, J. Llibre, and N. Vulpe, Complete geometric invariant study of two classes of quadratic systems, Electron. J. Differential Equations 2012 (2012), no. 09, 1–35, http://ejde.math.txstate.edu or http://ejde.math.unt.edu. Search in Google Scholar
[14] L. S. Lyagina, The integral curves of the equation y′=(ax2+bxy+cy2)∕(dx2+exy+fy2), (in Russian), Usp. Mat. Nauk. 42 (1951), 171–183. Search in Google Scholar
[15] K. S. Sibirskii and N. Vulpe, Geometric classification of quadratic differential systems, Differ. Uravn. 13 (1977), 803–814. Search in Google Scholar
[16] T. A. Newton, Two dimensional homogeneous quadratic differential systems, SIAM Review. 20 (1978), no. 1, 120–138, https://www.jstor.org/stable/2030141. 10.1137/1020007Search in Google Scholar
[17] R. Benterki and J. Llibre, Phase portraits of quadratic polynomial differential systems having as solution some classical planar algebraic curves of degree 4, Electron. J. Differential Equations 2019 (2019), no. 15, 1–25, http://ejde.math.txstate.edu or http://ejde.math.unt.edu. Search in Google Scholar
[18] A. Belfar and R. Benterki, Qualitative dynamics of five quadratic polynomial differential systems exhibiting five classical cubic algebraic curves, Rendiconti del Circolo Matematico di Palermo Series 2. 72 (2021), no. 1, 1–28, DOI: https://doi.org/10.1007/s12215-021-00675-x. 10.1007/s12215-021-00675-xSearch in Google Scholar
[19] J. Chavarriga, J. Giné, I. A. Garcia and E. Ribereau, Quadratic systems having third degree invariant algebraic curves, Rev. Roumaine Math. Pures Appl. 45 (2000), 93–106.Search in Google Scholar
[20] D. A. Neumann, Classification of continuous flows on 2-manifolds, Proc. Amer. Math. Soc. 48 (1975), no. 1, 73–81, DOI: https://doi.org/10.1090/S0002-9939-1975-0356138-6. 10.1090/S0002-9939-1975-0356138-6Search in Google Scholar
[21] L. Markus, Global structure of ordinary differential equations in the plane, Trans. Amer. Math Soc. 76 (1954), no. 1, 127–148, DOI: https://doi.org/10.2307/1990747. 10.1090/S0002-9947-1954-0060657-0Search in Google Scholar
[22] M. M. Peixoto, Dynamical systems, Proceedings of a Symposium held at the University of Bahia, Academic Press, New York-London, A subsidiary of Harcourt Brace Jovanovich., 1973, pp. 389–420. Search in Google Scholar
[23] W. A. Coppel, A survey of quadratic systems, J. Differential Equations 2 (1966), 293–304.10.1016/0022-0396(66)90070-2Search in Google Scholar
© 2023 the author(s), published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Regular Articles
- A novel class of bipolar soft separation axioms concerning crisp points
- Duality for convolution on subclasses of analytic functions and weighted integral operators
- Existence of a solution to an infinite system of weighted fractional integral equations of a function with respect to another function via a measure of noncompactness
- On the existence of nonnegative radial solutions for Dirichlet exterior problems on the Heisenberg group
- Hyers-Ulam stability of isometries on bounded domains-II
- Asymptotic study of Leray solution of 3D-Navier-Stokes equations with exponential damping
- Semi-Hyers-Ulam-Rassias stability for an integro-differential equation of order 𝓃
- Jordan triple (α,β)-higher ∗-derivations on semiprime rings
- The asymptotic behaviors of solutions for higher-order (m1, m2)-coupled Kirchhoff models with nonlinear strong damping
- Approximation of the image of the Lp ball under Hilbert-Schmidt integral operator
- Best proximity points in ℱ-metric spaces with applications
- Approximation spaces inspired by subset rough neighborhoods with applications
- A numerical Haar wavelet-finite difference hybrid method and its convergence for nonlinear hyperbolic partial differential equation
- A novel conservative numerical approximation scheme for the Rosenau-Kawahara equation
- Fekete-Szegö functional for a class of non-Bazilevic functions related to quasi-subordination
-
On local fractional integral inequalities via generalized
- On some geometric results for generalized k-Bessel functions
- Convergence analysis of M-iteration for 𝒢-nonexpansive mappings with directed graphs applicable in image deblurring and signal recovering problems
- Some results of homogeneous expansions for a class of biholomorphic mappings defined on a Reinhardt domain in ℂn
- Graded weakly 1-absorbing primary ideals
- The existence and uniqueness of solutions to a functional equation arising in psychological learning theory
- Some aspects of the n-ary orthogonal and b(αn,βn)-best approximations of b(αn,βn)-hypermetric spaces over Banach algebras
- Numerical solution of a malignant invasion model using some finite difference methods
- Increasing property and logarithmic convexity of functions involving Dirichlet lambda function
- Feature fusion-based text information mining method for natural scenes
- Global optimum solutions for a system of (k, ψ)-Hilfer fractional differential equations: Best proximity point approach
- The study of solutions for several systems of PDDEs with two complex variables
- Regularity criteria via horizontal component of velocity for the Boussinesq equations in anisotropic Lorentz spaces
- Generalized Stević-Sharma operators from the minimal Möbius invariant space into Bloch-type spaces
- On initial value problem for elliptic equation on the plane under Caputo derivative
- A dimension expanded preconditioning technique for block two-by-two linear equations
- Asymptotic behavior of Fréchet functional equation and some characterizations of inner product spaces
- Small perturbations of critical nonlocal equations with variable exponents
- Dynamical property of hyperspace on uniform space
- Some notes on graded weakly 1-absorbing primary ideals
- On the problem of detecting source points acting on a fluid
- Integral transforms involving a generalized k-Bessel function
- Ruled real hypersurfaces in the complex hyperbolic quadric
- On the monotonic properties and oscillatory behavior of solutions of neutral differential equations
- Approximate multi-variable bi-Jensen-type mappings
- Mixed-type SP-iteration for asymptotically nonexpansive mappings in hyperbolic spaces
- On the equation fn + (f″)m ≡ 1
- Results on the modified degenerate Laplace-type integral associated with applications involving fractional kinetic equations
- Characterizations of entire solutions for the system of Fermat-type binomial and trinomial shift equations in ℂn#
- Commentary
- On I. Meghea and C. S. Stamin review article “Remarks on some variants of minimal point theorem and Ekeland variational principle with applications,” Demonstratio Mathematica 2022; 55: 354–379
- Special Issue on Fixed Point Theory and Applications to Various Differential/Integral Equations - Part II
- On Cauchy problem for pseudo-parabolic equation with Caputo-Fabrizio operator
- Fixed-point results for convex orbital operators
- Asymptotic stability of equilibria for difference equations via fixed points of enriched Prešić operators
- Asymptotic behavior of resolvents of equilibrium problems on complete geodesic spaces
- A system of additive functional equations in complex Banach algebras
- New inertial forward–backward algorithm for convex minimization with applications
- Uniqueness of solutions for a ψ-Hilfer fractional integral boundary value problem with the p-Laplacian operator
- Analysis of Cauchy problem with fractal-fractional differential operators
- Common best proximity points for a pair of mappings with certain dominating property
- Investigation of hybrid fractional q-integro-difference equations supplemented with nonlocal q-integral boundary conditions
- The structure of fuzzy fractals generated by an orbital fuzzy iterated function system
- On the structure of self-affine Jordan arcs in ℝ2
- Solvability for a system of Hadamard-type hybrid fractional differential inclusions
- Three solutions for discrete anisotropic Kirchhoff-type problems
- On split generalized equilibrium problem with multiple output sets and common fixed points problem
- Special Issue on Computational and Numerical Methods for Special Functions - Part II
- Sandwich-type results regarding Riemann-Liouville fractional integral of q-hypergeometric function
- Certain aspects of Nörlund ℐ-statistical convergence of sequences in neutrosophic normed spaces
- On completeness of weak eigenfunctions for multi-interval Sturm-Liouville equations with boundary-interface conditions
- Some identities on generalized harmonic numbers and generalized harmonic functions
- Study of degenerate derangement polynomials by λ-umbral calculus
- Normal ordering associated with λ-Stirling numbers in λ-shift algebra
- Analytical and numerical analysis of damped harmonic oscillator model with nonlocal operators
- Compositions of positive integers with 2s and 3s
- Kinematic-geometry of a line trajectory and the invariants of the axodes
- Hahn Laplace transform and its applications
- Discrete complementary exponential and sine integral functions
- Special Issue on Recent Methods in Approximation Theory - Part II
- On the order of approximation by modified summation-integral-type operators based on two parameters
- Bernstein-type operators on elliptic domain and their interpolation properties
- A class of strongly convergent subgradient extragradient methods for solving quasimonotone variational inequalities
- Special Issue on Recent Advances in Fractional Calculus and Nonlinear Fractional Evaluation Equations - Part II
- Application of fractional quantum calculus on coupled hybrid differential systems within the sequential Caputo fractional q-derivatives
- On some conformable boundary value problems in the setting of a new generalized conformable fractional derivative
- A certain class of fractional difference equations with damping: Oscillatory properties
- Weighted Hermite-Hadamard inequalities for r-times differentiable preinvex functions for k-fractional integrals
- Special Issue on Recent Advances for Computational and Mathematical Methods in Scientific Problems - Part II
- The behavior of hidden bifurcation in 2D scroll via saturated function series controlled by a coefficient harmonic linearization method
- Phase portraits of two classes of quadratic differential systems exhibiting as solutions two cubic algebraic curves
- Petri net analysis of a queueing inventory system with orbital search by the server
- Asymptotic stability of an epidemiological fractional reaction-diffusion model
- On the stability of a strongly stabilizing control for degenerate systems in Hilbert spaces
- Special Issue on Application of Fractional Calculus: Mathematical Modeling and Control - Part I
- New conticrete inequalities of the Hermite-Hadamard-Jensen-Mercer type in terms of generalized conformable fractional operators via majorization
- Pell-Lucas polynomials for numerical treatment of the nonlinear fractional-order Duffing equation
- Impacts of Brownian motion and fractional derivative on the solutions of the stochastic fractional Davey-Stewartson equations
- Some results on fractional Hahn difference boundary value problems
- Properties of a subclass of analytic functions defined by Riemann-Liouville fractional integral applied to convolution product of multiplier transformation and Ruscheweyh derivative
- Special Issue on Development of Fuzzy Sets and Their Extensions - Part I
- The cross-border e-commerce platform selection based on the probabilistic dual hesitant fuzzy generalized dice similarity measures
- Comparison of fuzzy and crisp decision matrices: An evaluation on PROBID and sPROBID multi-criteria decision-making methods
- Rejection and symmetric difference of bipolar picture fuzzy graph
Articles in the same Issue
- Regular Articles
- A novel class of bipolar soft separation axioms concerning crisp points
- Duality for convolution on subclasses of analytic functions and weighted integral operators
- Existence of a solution to an infinite system of weighted fractional integral equations of a function with respect to another function via a measure of noncompactness
- On the existence of nonnegative radial solutions for Dirichlet exterior problems on the Heisenberg group
- Hyers-Ulam stability of isometries on bounded domains-II
- Asymptotic study of Leray solution of 3D-Navier-Stokes equations with exponential damping
- Semi-Hyers-Ulam-Rassias stability for an integro-differential equation of order 𝓃
- Jordan triple (α,β)-higher ∗-derivations on semiprime rings
- The asymptotic behaviors of solutions for higher-order (m1, m2)-coupled Kirchhoff models with nonlinear strong damping
- Approximation of the image of the Lp ball under Hilbert-Schmidt integral operator
- Best proximity points in ℱ-metric spaces with applications
- Approximation spaces inspired by subset rough neighborhoods with applications
- A numerical Haar wavelet-finite difference hybrid method and its convergence for nonlinear hyperbolic partial differential equation
- A novel conservative numerical approximation scheme for the Rosenau-Kawahara equation
- Fekete-Szegö functional for a class of non-Bazilevic functions related to quasi-subordination
-
On local fractional integral inequalities via generalized
- On some geometric results for generalized k-Bessel functions
- Convergence analysis of M-iteration for 𝒢-nonexpansive mappings with directed graphs applicable in image deblurring and signal recovering problems
- Some results of homogeneous expansions for a class of biholomorphic mappings defined on a Reinhardt domain in ℂn
- Graded weakly 1-absorbing primary ideals
- The existence and uniqueness of solutions to a functional equation arising in psychological learning theory
- Some aspects of the n-ary orthogonal and b(αn,βn)-best approximations of b(αn,βn)-hypermetric spaces over Banach algebras
- Numerical solution of a malignant invasion model using some finite difference methods
- Increasing property and logarithmic convexity of functions involving Dirichlet lambda function
- Feature fusion-based text information mining method for natural scenes
- Global optimum solutions for a system of (k, ψ)-Hilfer fractional differential equations: Best proximity point approach
- The study of solutions for several systems of PDDEs with two complex variables
- Regularity criteria via horizontal component of velocity for the Boussinesq equations in anisotropic Lorentz spaces
- Generalized Stević-Sharma operators from the minimal Möbius invariant space into Bloch-type spaces
- On initial value problem for elliptic equation on the plane under Caputo derivative
- A dimension expanded preconditioning technique for block two-by-two linear equations
- Asymptotic behavior of Fréchet functional equation and some characterizations of inner product spaces
- Small perturbations of critical nonlocal equations with variable exponents
- Dynamical property of hyperspace on uniform space
- Some notes on graded weakly 1-absorbing primary ideals
- On the problem of detecting source points acting on a fluid
- Integral transforms involving a generalized k-Bessel function
- Ruled real hypersurfaces in the complex hyperbolic quadric
- On the monotonic properties and oscillatory behavior of solutions of neutral differential equations
- Approximate multi-variable bi-Jensen-type mappings
- Mixed-type SP-iteration for asymptotically nonexpansive mappings in hyperbolic spaces
- On the equation fn + (f″)m ≡ 1
- Results on the modified degenerate Laplace-type integral associated with applications involving fractional kinetic equations
- Characterizations of entire solutions for the system of Fermat-type binomial and trinomial shift equations in ℂn#
- Commentary
- On I. Meghea and C. S. Stamin review article “Remarks on some variants of minimal point theorem and Ekeland variational principle with applications,” Demonstratio Mathematica 2022; 55: 354–379
- Special Issue on Fixed Point Theory and Applications to Various Differential/Integral Equations - Part II
- On Cauchy problem for pseudo-parabolic equation with Caputo-Fabrizio operator
- Fixed-point results for convex orbital operators
- Asymptotic stability of equilibria for difference equations via fixed points of enriched Prešić operators
- Asymptotic behavior of resolvents of equilibrium problems on complete geodesic spaces
- A system of additive functional equations in complex Banach algebras
- New inertial forward–backward algorithm for convex minimization with applications
- Uniqueness of solutions for a ψ-Hilfer fractional integral boundary value problem with the p-Laplacian operator
- Analysis of Cauchy problem with fractal-fractional differential operators
- Common best proximity points for a pair of mappings with certain dominating property
- Investigation of hybrid fractional q-integro-difference equations supplemented with nonlocal q-integral boundary conditions
- The structure of fuzzy fractals generated by an orbital fuzzy iterated function system
- On the structure of self-affine Jordan arcs in ℝ2
- Solvability for a system of Hadamard-type hybrid fractional differential inclusions
- Three solutions for discrete anisotropic Kirchhoff-type problems
- On split generalized equilibrium problem with multiple output sets and common fixed points problem
- Special Issue on Computational and Numerical Methods for Special Functions - Part II
- Sandwich-type results regarding Riemann-Liouville fractional integral of q-hypergeometric function
- Certain aspects of Nörlund ℐ-statistical convergence of sequences in neutrosophic normed spaces
- On completeness of weak eigenfunctions for multi-interval Sturm-Liouville equations with boundary-interface conditions
- Some identities on generalized harmonic numbers and generalized harmonic functions
- Study of degenerate derangement polynomials by λ-umbral calculus
- Normal ordering associated with λ-Stirling numbers in λ-shift algebra
- Analytical and numerical analysis of damped harmonic oscillator model with nonlocal operators
- Compositions of positive integers with 2s and 3s
- Kinematic-geometry of a line trajectory and the invariants of the axodes
- Hahn Laplace transform and its applications
- Discrete complementary exponential and sine integral functions
- Special Issue on Recent Methods in Approximation Theory - Part II
- On the order of approximation by modified summation-integral-type operators based on two parameters
- Bernstein-type operators on elliptic domain and their interpolation properties
- A class of strongly convergent subgradient extragradient methods for solving quasimonotone variational inequalities
- Special Issue on Recent Advances in Fractional Calculus and Nonlinear Fractional Evaluation Equations - Part II
- Application of fractional quantum calculus on coupled hybrid differential systems within the sequential Caputo fractional q-derivatives
- On some conformable boundary value problems in the setting of a new generalized conformable fractional derivative
- A certain class of fractional difference equations with damping: Oscillatory properties
- Weighted Hermite-Hadamard inequalities for r-times differentiable preinvex functions for k-fractional integrals
- Special Issue on Recent Advances for Computational and Mathematical Methods in Scientific Problems - Part II
- The behavior of hidden bifurcation in 2D scroll via saturated function series controlled by a coefficient harmonic linearization method
- Phase portraits of two classes of quadratic differential systems exhibiting as solutions two cubic algebraic curves
- Petri net analysis of a queueing inventory system with orbital search by the server
- Asymptotic stability of an epidemiological fractional reaction-diffusion model
- On the stability of a strongly stabilizing control for degenerate systems in Hilbert spaces
- Special Issue on Application of Fractional Calculus: Mathematical Modeling and Control - Part I
- New conticrete inequalities of the Hermite-Hadamard-Jensen-Mercer type in terms of generalized conformable fractional operators via majorization
- Pell-Lucas polynomials for numerical treatment of the nonlinear fractional-order Duffing equation
- Impacts of Brownian motion and fractional derivative on the solutions of the stochastic fractional Davey-Stewartson equations
- Some results on fractional Hahn difference boundary value problems
- Properties of a subclass of analytic functions defined by Riemann-Liouville fractional integral applied to convolution product of multiplier transformation and Ruscheweyh derivative
- Special Issue on Development of Fuzzy Sets and Their Extensions - Part I
- The cross-border e-commerce platform selection based on the probabilistic dual hesitant fuzzy generalized dice similarity measures
- Comparison of fuzzy and crisp decision matrices: An evaluation on PROBID and sPROBID multi-criteria decision-making methods
- Rejection and symmetric difference of bipolar picture fuzzy graph