New inertial forward–backward algorithm for convex minimization with applications
-


Abstract
In this work, we present a new proximal gradient algorithm based on Tseng’s extragradient method and an inertial technique to solve the convex minimization problem in real Hilbert spaces. Using the stepsize rules, the selection of the Lipschitz constant of the gradient of functions is avoided. We then prove the weak convergence theorem and present the numerical experiments for image recovery. The comparative results show that the proposed algorithm has better efficiency than other methods.
1 Introduction and preliminaries
The forward–backward splitting (FBS) algorithm [1,2] was proposed for solving the convex minimization problem (MNP) of two objective functions in a real Hilbert space
where
where
for all
The elements in
In 2000, Tseng [17] introduced the forward–backward-forward splitting (FBFS) algorithm, also known as Tseng’s extragradient algorithm or Tseng’s method. FBFS is generated by
where
where
To improve the convergence of the algorithm, a popular technique is using inertial-type methods. For other inertial methods, we refer to [18,19,20, 21,22,23]. In this work, we consider the inertial forward–backward method [18,24] (IFB), which is generated by
where
Many proximal gradient methods usually use the assumption that the gradient is Lipschitz continuous and the step size is bounded below the Lipschitz constant. This is somehow not known in practice. For this reason, Bello Cruz and Nghia [25] proposed the linesearch rule by setting
A new version of the forward–backward method (FISTA-CN) based on (1.7) is generated by the following:
where the inertial parameter
where
Motivated by previous works, in this work, we are interested to introduce a new inertial proximal algorithm for solving the convex MNPs and provide a weak convergence theorem for the proposed algorithm without the Lipschitz continuity condition on the gradient. We provide numerical experiments for our algorithm to solve image recovery problems and show the efficiency of the proposed algorithms when compared with FBS-CW [1], FISTA-BT [24], FISTA-CN [25], FBFS [17], and NAGA [26].
2 Main theorem
Now, we assume that
Algorithm 2.1
The inertial modified FBS (IMFBS) algorithm.
Initialization: Given
Iterative step: Let
Step 1. Compute the inertial step:
where
Step 2. Compute the forward–backward step:
where
Step 3. Compute the forward–backward step:
Step 4. Compute the
and update
Set
Theorem 2.3
Suppose that
Proof
Let
By definition of
Since
This, together with the monotonicity of
Hence, we have
We know that
It implies that
By definition of
Note that
It follows that
Combining (2.8) and (2.9), we have
By definition of
By the convexity of
By the convexity of
Combining (2.1), (2.11), and (2.12), we have
By (2.13) and the convexity of
We see that
It implies that
Hence, from (2.7), (2.10), and (2.15), we obtain
Now, we will show that
This shows that
By Lemma 5 in [27], we conclude that
where
Since
By definition of
Since
Since the sequence
From (1.3), we obtain
It follows that
By passing
3 Numerical experiments
In this section, we apply Algorithm 2.1 to solve the image restoration problem and compare the efficiency of FBS-CW [1], FISTA-BT [24], FISTA-CN [25], FBFS [17], and NAGA [26]. The numerical experiments are performed by Matlab 2020b on a 64-bit MacBook Pro Chip Apple M1 and 8 GB of RAM.
The image restoration problem can be modeled as follows:
where
where
To evaluate the quality of the restored images, we use the peak signal-to-noise ratio (PSNR) [30] and the structural similarity index (SSIM) [31], which are defined as follows:
and
where
All parameters are chosen as in Table 1. The initial point
Chosen parameters of each algorithm
| Algorithms | Chosen parameters | |||||
|---|---|---|---|---|---|---|
|
|
|
|
|
|
|
|
| FBS-CW |
|
|
||||
| FISTA-BT |
|
|
||||
| FISTA-CN |
|
|
|
|||
| NAGA |
|
|
||||
| FBFS |
|
|||||
| IMFBS |
|
|
|
|
||
The original images and three different blurring matrices types for the original images of sizes
![Figure 1
The original image size
448
×
298
448\times 298
(Fig(A)) and the deblurred RGB images by out-of-focus blur matrices with radius 6 (BM-1.1), Gaussian blur with standard deviation 7 of the filter size
[
5
×
5
]
\left[5\times 5]
(BM-1.2), and the deblurred images by motion blur specified with the motion length of 11 pixels and motion orientation 23 (BM-1.3), respectively.](/document/doi/10.1515/dema-2022-0188/asset/graphic/j_dema-2022-0188_fig_001.jpg)
The original image size
![Figure 2
The original image size
240
×
320
240\times 320
(Fig(A)) and the deblurred RGB image by out-of-focus blur matrices with radius 6 (BM-1.1), Gaussian blur with standard deviation 7 of the filter size
[
5
×
5
]
\left[5\times 5]
(BM-2.2), and the deblurred image by motion blur specified with the motion length of 11 pixels and motion orientation 23 (BM-2.3), respectively.](/document/doi/10.1515/dema-2022-0188/asset/graphic/j_dema-2022-0188_fig_002.jpg)
The original image size
The results of the deblurred images with
The results of deblurred images for each algorithm
| Fig(A) |
|
Algorithms | Blurred type | |||||
|---|---|---|---|---|---|---|---|---|
| BM-1.1 | BM-1.2 | BM-1.3 | ||||||
| PSNR | SSIM | PSNR | SSIM | PSNR | SSIM | |||
| The original image size
|
500 | FBS-CW | 25.8764 | 0.7715 | 29.0112 | 0.8899 | 31.2942 | 0.9242 |
| FISTA-BT | 35.5477 | 0.9446 | 38.3302 | 0.9621 | 40.5405 | 0.9835 | ||
| FISTA-CN | 36.5491 | 0.9543 | 39.5388 | 0.9705 | 41.8671 | 0.9871 | ||
| NAGA | 36.2057 | 0.9514 | 39.1270 | 0.9678 | 41.4341 | 0.9859 | ||
| FBFS | 24.2054 | 0.7072 | 27.5600 | 0.8583 | 29.8552 | 0.8996 | ||
| IMFBS | 38.7966 | 0.9702 | 41.6765 | 0.9816 | 44.6781 | 0.9930 | ||
| 1,000 | FBS-CW | 26.1910 | 0.7837 | 29.2922 | 0.8957 | 31.5644 | 0.9286 | |
| FISTA-BT | 37.0305 | 0.9586 | 39.6679 | 0.9715 | 41.7964 | 0.9883 | ||
| FISTA-CN | 38.1887 | 0.9664 | 40.9419 | 0.9780 | 43.1783 | 0.9911 | ||
| NAGA | 37.7800 | 0.9641 | 40.5485 | 0.9759 | 42.6821 | 0.9901 | ||
| FBFS | 24.6732 | 0.7225 | 27.8260 | 0.8662 | 30.1126 | 0.9053 | ||
| IMFBS | 40.5491 | 0.9782 | 43.2354 | 0.9868 | 45.9856 | 0.9950 | ||
| 1,500 | FBS-CW | 26.4418 | 0.7923 | 29.5205 | 0.8996 | 31.7869 | 0.9318 | |
| FISTA-BT | 38.0757 | 0.9664 | 40.6216 | 0.9765 | 42.6318 | 0.9906 | ||
| FISTA-CN | 39.2981 | 0.9726 | 41.9730 | 0.9833 | 44.0774 | 0.9330 | ||
| NAGA | 38.8771 | 0.9708 | 41.5473 | 0.9813 | 43.5755 | 0.9923 | ||
| FBFS | 24.8915 | 0.7331 | 28.0377 | 0.8717 | 30.3250 | 0.9094 | ||
| IMFBS | 41.7181 | 0.9828 | 44.4942 | 0.9901 | 47.3108 | 0.9964 | ||
The results of deblurred images for each algorithm
| Fig(B) |
|
Algorithms | Blurred type | |||||
|---|---|---|---|---|---|---|---|---|
| BM-2.1 | BM-2.2 | BM-2.3 | ||||||
| PSNR | SSIM | PSNR | SSIM | PSNR | SSIM | |||
| The original image size
|
500 | FBS-CW | 28.1063 | 0.8764 | 33.3164 | 0.9479 | 32.8894 | 0.9503 |
| FISTA-BT | 38.4144 | 0.9733 | 42.9090 | 0.9888 | 42.9989 | 0.9911 | ||
| FISTA-CN | 39.3158 | 0.9779 | 43.9720 | 0.9910 | 44.3774 | 0.9932 | ||
| NAGA | 39.0548 | 0.9767 | 43.6322 | 0.9904 | 43.9016 | 0.9926 | ||
| FBFS | 26.7863 | 0.8427 | 31.5921 | 0.9344 | 31.3430 | 0.9354 | ||
| IMFBS | 41.2504 | 0.9843 | 46.2374 | 0.9945 | 46.6263 | 0.9958 | ||
| 1,000 | FBS-CW | 28.3151 | 0.8818 | 33.5886 | 0.9507 | 33.1323 | 0.9530 | |
| FISTA-BT | 39.1638 | 0.9772 | 43.9748 | 0.9912 | 44.0517 | 0.9931 | ||
| FISTA-CN | 40.1671 | 0.9813 | 45.1091 | 0.9929 | 45.4008 | 0.9948 | ||
| NAGA | 39.9064 | 0.9804 | 44.7171 | 0.9923 | 45.1169 | 0.9945 | ||
| FBFS | 26.9618 | 0.8486 | 31.8549 | 0.9378 | 31.5693 | 0.9388 | ||
| IMFBS | 42.2498 | 0.9874 | 47.3408 | 0.9957 | 47.6728 | 0.9968 | ||
| 1,500 | FBS-CW | 28.5033 | 0.8862 | 33.8154 | 0.9526 | 33.3404 | 0.9549 | |
| FISTA-BT | 39.7800 | 0.9800 | 44.7409 | 0.9925 | 44.9116 | 0.9943 | ||
| FISTA-CN | 40.8390 | 0.9836 | 45.9122 | 0.9941 | 46.2742 | 0.9957 | ||
| NAGA | 40.4829 | 0.9825 | 45.5109 | 0.9936 | 45.8330 | 0.9953 | ||
| FBFS | 27.1200 | 0.8534 | 32.0793 | 0.9402 | 31.7652 | 0.9412 | ||
| IMFBS | 43.0213 | 0.9891 | 48.0766 | 0.9963 | 48.6282 | 0.9974 | ||
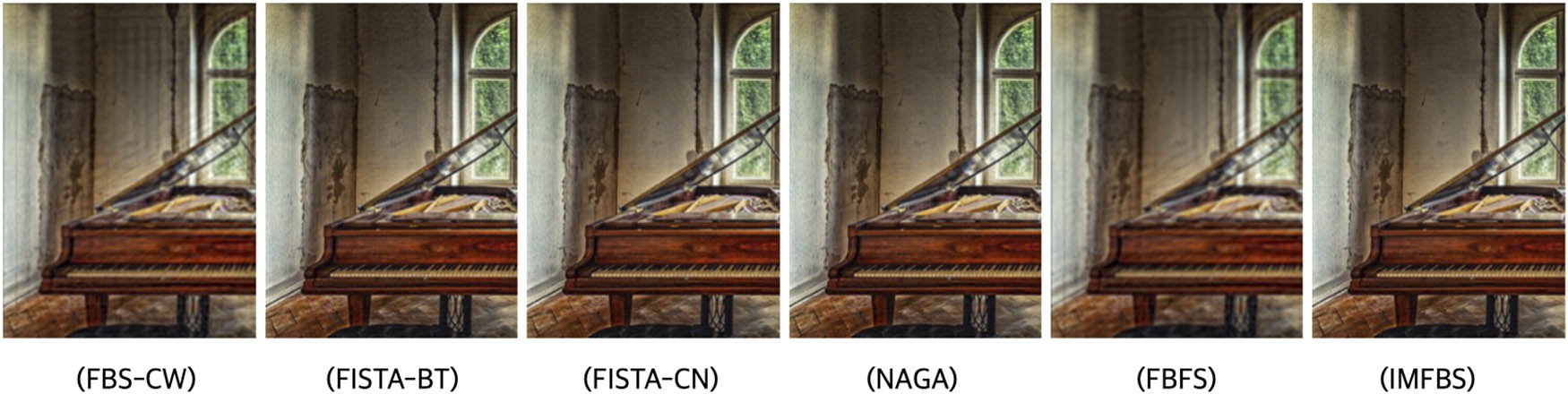
The restored images by BM-1.1 for FBS-CW (PSNR:26.07923, SSIM:0.7923), FISTA-BT (PSNR:38.9664, SSIM:0.9664), FISTA-CN (PSNR:39.2981, SSIM:0.9726), NAGA (PSNR:38.8771 SSIM:0.9708), FBFS (PSNR:24.8915 SSIM:0.7331), and IMFBS (PSNR:41.7181, SSIM:0.9828), respectively.
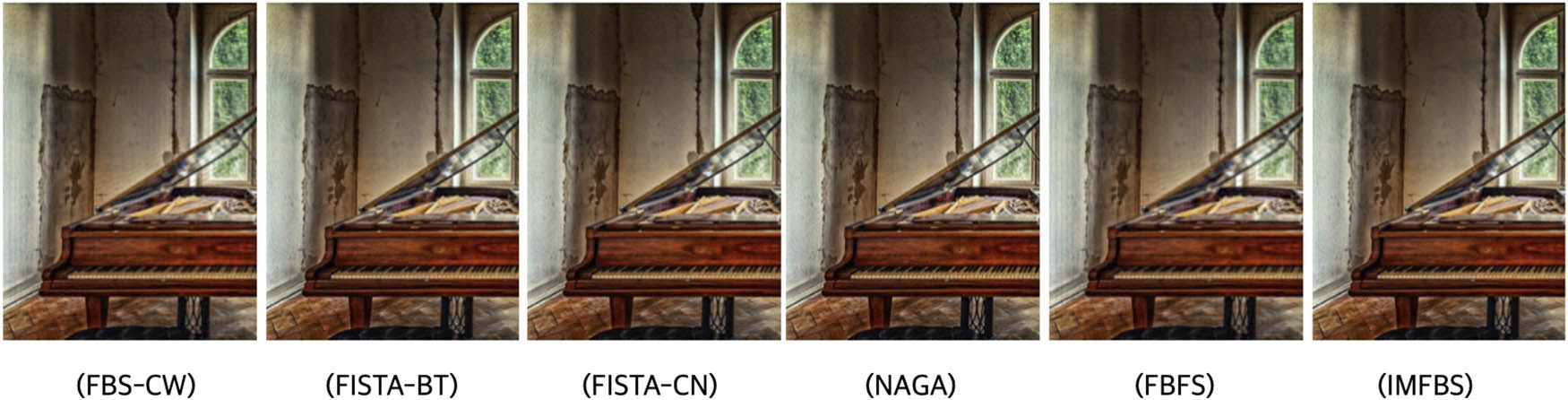
The restored images by BM-1.2 for FBS-CW (PSNR:29.5205, SSIM:0.8996), FISTA-BT (PSNR:40.6212, SSIM:0.9765), FISTA-CN (PSNR:41.9730, SSIM:0.9833), NAGA (PSNR:41.5473, SSIM:0.9813), FBFS (PSNR:28.0377, SSIM:0.8717), and IMFBS (PSNR:44.4942, SSIM:0.9901), respectively.
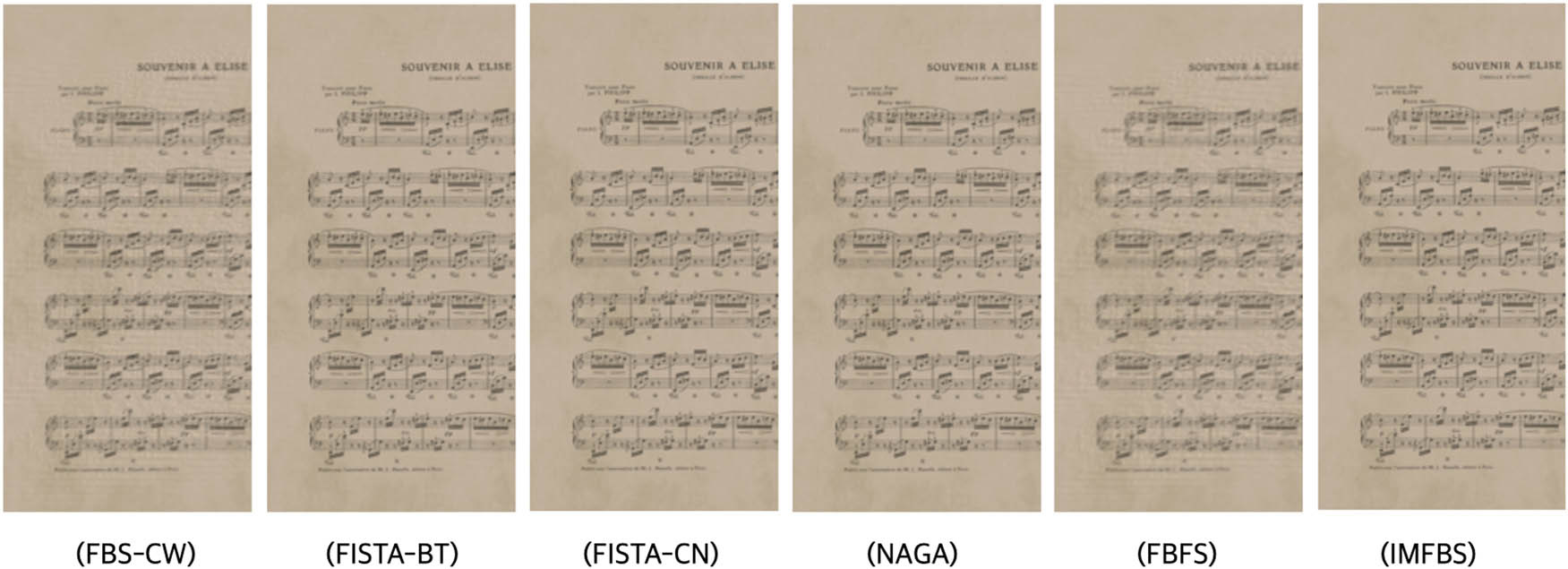
The restored images by BM-2.3 for FBS-CW (PSNR:33.3404, SSIM:0.9549), FISTA-BT (PSNR:44.9116, SSIM:0.9943), FISTA-CN (PSNR:46.2742, SSIM:0.9957), NAGA (PSNR:45.8330, SSIM:0.9953), FBFS (PSNR:31.7652, SSIM:0.9412), and IMFBS (PSNR:48.6282, SSIM:0.9974), respectively.
In Figures 6, 7, and 8, we plot the number of iterations versus the PSNR [30] and the SSIM [31].
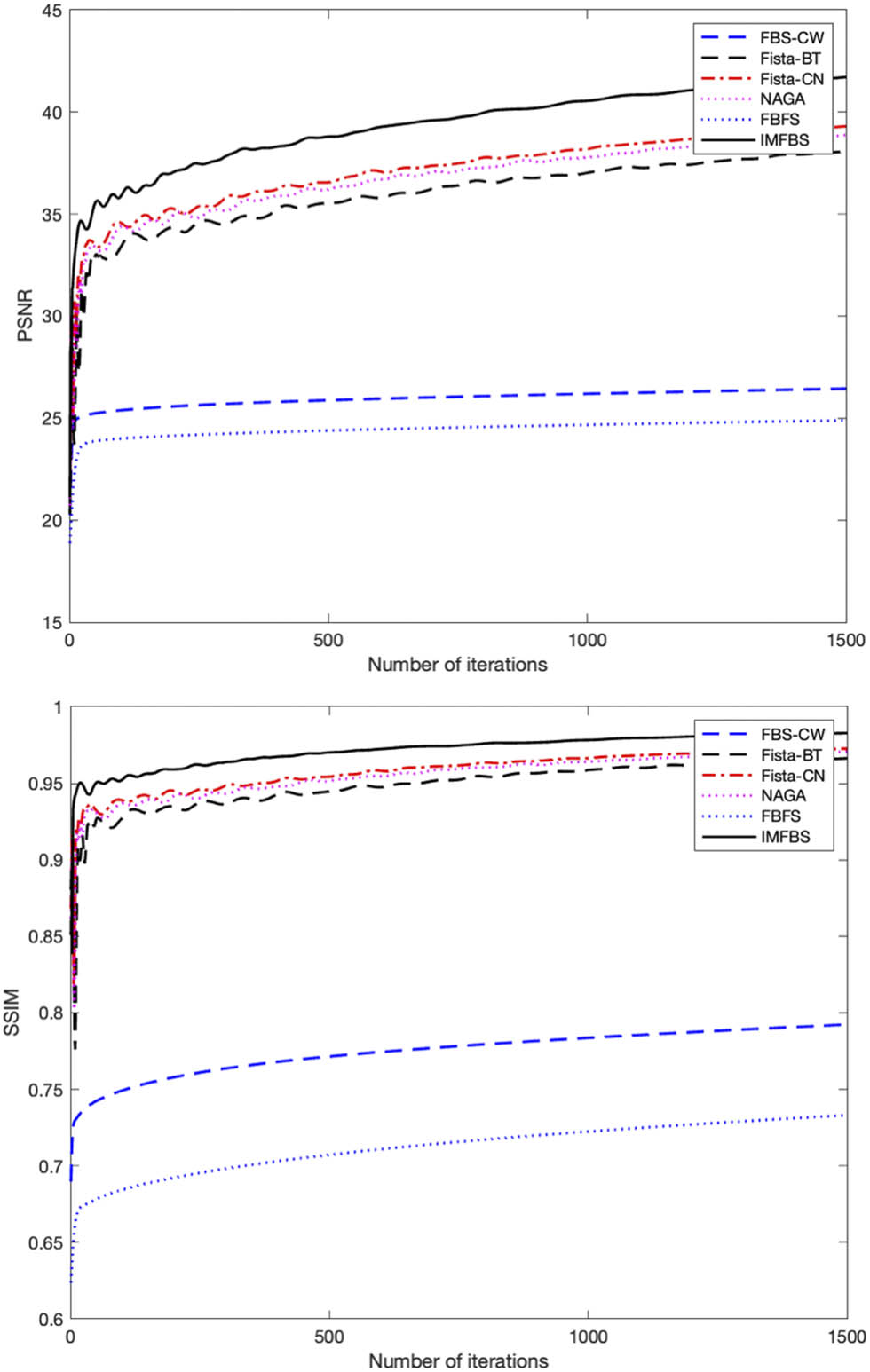
Graphs of PSNR and SSIM for FIG(A) by out of focusing, respectively.

Graphs of PSNR and SSIM for FIG(A) by Gaussian blur matrices, respectively.
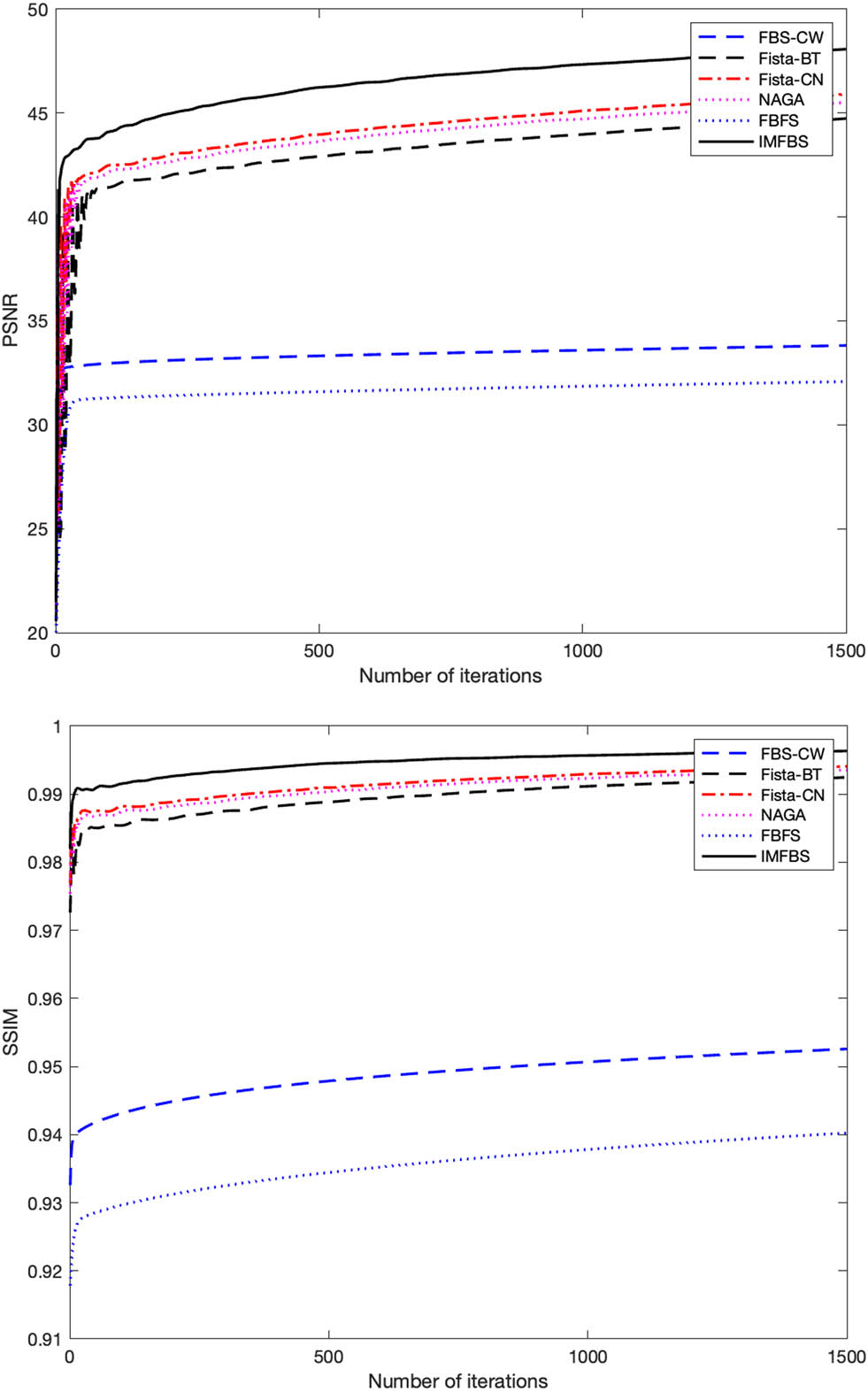
Graphs of PSNR and SSIM for Fig(B) by motion blurring, respectively.
4 Conclusion
In this work, we have introduced a new inertial proximal gradient algorithm for solving the convex MNPs and have proved a weak convergence theorem without the Lipschitz continuity conditions on the gradient of functions. We provided some numerical experiments and applied our algorithm to the image recovery problem. We also compared our algorithm with FBS-CW [1], FISTA-BT [24], FISTA-CN [25], FBFS [17], and NAGA [26]. It was shown that our algorithm has better efficiency than other algorithms in terms of PSNR and SSIM for all blurred types.
Acknowledgement
The authors sincerely thank the anonymous reviewers for their careful reading, constructive comments, and suggestions for some related references that improved the manuscript substantially.
-
Funding information: This work was supported by the National Research Council of Thailand under grant no. N41A640094 and the Thailand Science Research and Innovation Fund and the University of Phayao under the project FF66-UoE.
-
Author contributions: The authors conceived the study, participated in its design and coordination, drafted the manuscript, participated in the sequence alignment, and read and approved the final manuscript.
-
Conflict of interest: The authors declare that they have no competing interests.
-
Data availability statement: Data sharing is not applicable to this article as no datasets were generated or analyzed during this study.
References
[1] P. L. Combettes and V. R. Wajs, Signal recovery by proximal forward–backward splitting, Multiscale Model. Simul. 4 (2005), 1168–1200, DOI: https://doi.org/10.1137/050626090. 10.1137/050626090Suche in Google Scholar
[2] P. L. Lions and B. Mercier, Splitting algorithms for the sum of two nonlinear operators, SIAM J. Numer. Anal. 16 (1979), 964–979, DOI: https://doi.org/10.1137/0716071. 10.1137/0716071Suche in Google Scholar
[3] S. Khatoon, W. Cholamjiak, and I. Uddin, A modified proximal point algorithm involving nearly asymptotically quasi-nonexpansive mappings, J. Inequal. Appl. 2021 (2021), 1–20, DOI: https://doi.org/10.1186/s13660-021-02618-7. 10.1186/s13660-021-02618-7Suche in Google Scholar
[4] S. Khatoon, I. Uddin, and M. Basarir, A modified proximal point algorithm for a nearly asymptotically quasi-nonexpansive mapping with an application, Comput. Appl. Math. 40 (2021), 1–19, DOI: https://doi.org/10.1007/s40314-021-01646-9. 10.1007/s40314-021-01646-9Suche in Google Scholar
[5] C. Khunpanuk, C. Garodia, I. Uddin, and N. Pakkaranang, On a proximal point algorithm for solving common fixed point problems and convex minimization problems in Geodesic spaces with positive curvature, AIMS Math. 7 (2022), 9509–9523, DOI: https://doi.org/10.3934/math.2022529. 10.3934/math.2022529Suche in Google Scholar
[6] C. Garodia, I. Uddin, and D. Baleanu, On constrained minimization, variational inequality and split feasibility problem via new iteration scheme in Banach spaces, Bull. Iran. Math. Soc. 48 (2022), 1493–1512, DOI: https://doi.org/10.1007/s41980-021-00596-6. 10.1007/s41980-021-00596-6Suche in Google Scholar
[7] T. Kajimura and Y. Kimura, The proximal point algorithm in complete geodesic spaces with negative curvature, Adv. Theory Nonlinear Anal. Appl. 3 (2019), 192–200, DOI: https://doi.org/10.31197/atnaa.573972. 10.31197/atnaa.573972Suche in Google Scholar
[8] M. A. Hajji, Forward-backward alternating parallel shooting method for multi-layer boundary value problems, Adv. Theory Nonlinear Anal. Appl. 4 (2020), 432–442, DOI: https://doi.org/10.31197/atnaa.753561. 10.31197/atnaa.753561Suche in Google Scholar
[9] A. N. Iusem, B. F. Svaiter, and M. Teboulle, Entropy-like proximal methods in convex programming, Math. Oper. Res. 19 (1994), 790–814, DOI: https://doi.org/10.1287/moor.19.4.790. 10.1287/moor.19.4.790Suche in Google Scholar
[10] J. C. Dunn, Convexity, monotonicity, and gradient processes in Hilbert space, J. Math. Anal. Appl. 53 (1976), 145–158, DOI: https://doi.org/10.1016/0022-247X(76)90152-9. 10.1016/0022-247X(76)90152-9Suche in Google Scholar
[11] C. Wang and N. Xiu, Convergence of the gradient projection method for generalized convex minimization, Comput. Optim. Appl. 16 (2000), 111–120, DOI: https://doi.org/10.1023/A:1008714607737. 10.1023/A:1008714607737Suche in Google Scholar
[12] H. K. Xu, Averaged mappings and the gradient-projection algorithm, J. Optim. Theory Appl. 150 (2011), 360–378, DOI: https://doi.org/10.1007/s10957-011-9837-z. 10.1007/s10957-011-9837-zSuche in Google Scholar
[13] K. Kankam, N. Pholasa, and P. Cholamjiak, On convergence and complexity of the modified forward-Řbackward method involving new linesearches for convex minimization. Math. Methods Appl. Sci. 42 (2019), 1352–1362, DOI: https://doi.org/10.1002/mma.5420. 10.1002/mma.5420Suche in Google Scholar
[14] S. Suantai, M. A. Noor, K. Kankam, and P. Cholamjiak, Novel forward–backward algorithms for optimization and applications to compressive sensing and image inpainting, Adv. Difference Equ. 2021 (2021), 1–22, DOI: https://doi.org/10.1186/s13662-021-03422-9. 10.1186/s13662-021-03422-9Suche in Google Scholar
[15] K. Kankam, N. Pholasa, and P. Cholamjiak, Hybrid forward–backward algorithms using linesearch rule for minimization problem, Thai J. Math. 17 (2019), 607–625. Suche in Google Scholar
[16] K. Kankam and P. Cholamjiak, Strong convergence of the forward–backward splitting algorithms via linesearches in Hilbert spaces, Appl. Anal. 2021 (2021), 1–20, DOI: https://doi.org/10.1080/00036811.2021.1986021. 10.1080/00036811.2021.1986021Suche in Google Scholar
[17] P. Tseng, A modified forward–backward splitting method for maximal monotone mappings, SIAM J. Control Optim. 38 (2000), 431–446, DOI: https://doi.org/10.1137/S0363012998338806. 10.1137/S0363012998338806Suche in Google Scholar
[18] H. Attouch and J. Peypouquet, The rate of convergence of Nesterov’s accelerated forward–backward method is actually faster than 1∕k2, SIAM J. Control Optim. 26 (2016), 1824–1834, DOI: https://doi.org/10.1137/15M1046095. 10.1137/15M1046095Suche in Google Scholar
[19] A. Moudafi and M. Oliny, Convergence of a splitting inertial proximal method for monotone operators, J. Comput. Appl. Math. 155 (2003), 447–454, DOI: https://doi.org/10.1016/S0377-0427(02)00906-8. 10.1016/S0377-0427(02)00906-8Suche in Google Scholar
[20] Y. E. Nesterov, A method for solving the convex programming problem with convergence rate O(1∕k2), Dokl. Akad. Nauk SSR. 269 (1983), 543–547. Suche in Google Scholar
[21] B. T. Polyak, Some methods of speeding up the convergence of iteration methods, USSR Comput. Math. Math. Phys. 4 (1964), 1–17, DOI: https://doi.org/10.1016/0041-5553(64)90137-5. 10.1016/0041-5553(64)90137-5Suche in Google Scholar
[22] F. Akutsah, A. A. Mebawondu, G. C. Ugwunnadi, and O. K. Narain, Inertial extrapolation method with regularization for solving monotone bilevel variation inequalities and fixed point problems, J. Nonlinear Funct. Anal. 2022 (2022), 5, DOI: https://doi.org/10.23952/jnfa.2022.5. 10.23952/jnfa.2022.5Suche in Google Scholar
[23] L. Liu, S. Y. Cho, and J. C. Yao, Convergence analysis of an inertial Tseng’s extragradient algorithm for solving pseudomonotone variational inequalities and applications, J. Nonlinear Var. Anal. 5 (2021), 627–644. Suche in Google Scholar
[24] A. Beck and M. Teboulle, A fast iterative shrinkage-thresholding algorithm for linear inverse problems, SIAM J. Imaging Sci. 2 (2009), 183–202, DOI: https://doi.org/10.1137/080716542. 10.1137/080716542Suche in Google Scholar
[25] J. Y. Bello Cruz and T. T. Nghia, On the convergence of the forward–backward splitting method with linesearches, Optim. Methods Softw. 31 (2016), 1209–1238, DOI: https://doi.org/10.1080/10556788.2016.1214959. 10.1080/10556788.2016.1214959Suche in Google Scholar
[26] M. Verma and K. K. Shukla, A new accelerated proximal gradient technique for regularized multitask learning framework, Pattern Recognit. Lett. 95 (2017), 98–103, DOI: https://doi.org/10.1016/j.patrec.2017.06.013. 10.1016/j.patrec.2017.06.013Suche in Google Scholar
[27] A. Hanjing and S. Suantai, A fast image restoration algorithm based on a fixed point and optimization method, Mathematics, 8 (2020), 378, DOI: https://doi.org/10.3390/math8030378. 10.3390/math8030378Suche in Google Scholar
[28] H. H. Bauschke and P. L. Combettes, Convex Analysis and Monotone Operator Theory in Hilbert Spaces, Springer, New York, 2011. 10.1007/978-1-4419-9467-7Suche in Google Scholar
[29] R. Tibshirani, Regression shrinkage and selection via the lasso, J. R. Stat. Soc. Series B. Stat. Methodol. 58 (1996), 267–288, DOI: https://doi.org/10.1111/j.2517-6161.1996.tb02080.x. 10.1111/j.2517-6161.1996.tb02080.xSuche in Google Scholar
[30] K. H. Thung and P. Raveendran, A survey of image quality measures. In 2009 International Conference for Technical Postgraduates (TECHPOS), IEEE; 2009, December. p. 1–4. 10.1109/TECHPOS.2009.5412098Suche in Google Scholar
[31] Z. Wang, A. C. Bovik, and E. P. Simoncelli, Image quality assessment: from error visibility to structural similarity, IEEE Trans. Image Process. 13 (2004), 600–612, DOI: https://doi.org/10.1109/TIP.2003.819861. 10.1109/TIP.2003.819861Suche in Google Scholar PubMed
© 2023 the author(s), published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Artikel in diesem Heft
- Regular Articles
- A novel class of bipolar soft separation axioms concerning crisp points
- Duality for convolution on subclasses of analytic functions and weighted integral operators
- Existence of a solution to an infinite system of weighted fractional integral equations of a function with respect to another function via a measure of noncompactness
- On the existence of nonnegative radial solutions for Dirichlet exterior problems on the Heisenberg group
- Hyers-Ulam stability of isometries on bounded domains-II
- Asymptotic study of Leray solution of 3D-Navier-Stokes equations with exponential damping
- Semi-Hyers-Ulam-Rassias stability for an integro-differential equation of order 𝓃
- Jordan triple (α,β)-higher ∗-derivations on semiprime rings
- The asymptotic behaviors of solutions for higher-order (m1, m2)-coupled Kirchhoff models with nonlinear strong damping
- Approximation of the image of the Lp ball under Hilbert-Schmidt integral operator
- Best proximity points in ℱ-metric spaces with applications
- Approximation spaces inspired by subset rough neighborhoods with applications
- A numerical Haar wavelet-finite difference hybrid method and its convergence for nonlinear hyperbolic partial differential equation
- A novel conservative numerical approximation scheme for the Rosenau-Kawahara equation
- Fekete-Szegö functional for a class of non-Bazilevic functions related to quasi-subordination
-
On local fractional integral inequalities via generalized
- On some geometric results for generalized k-Bessel functions
- Convergence analysis of M-iteration for 𝒢-nonexpansive mappings with directed graphs applicable in image deblurring and signal recovering problems
- Some results of homogeneous expansions for a class of biholomorphic mappings defined on a Reinhardt domain in ℂn
- Graded weakly 1-absorbing primary ideals
- The existence and uniqueness of solutions to a functional equation arising in psychological learning theory
- Some aspects of the n-ary orthogonal and b(αn,βn)-best approximations of b(αn,βn)-hypermetric spaces over Banach algebras
- Numerical solution of a malignant invasion model using some finite difference methods
- Increasing property and logarithmic convexity of functions involving Dirichlet lambda function
- Feature fusion-based text information mining method for natural scenes
- Global optimum solutions for a system of (k, ψ)-Hilfer fractional differential equations: Best proximity point approach
- The study of solutions for several systems of PDDEs with two complex variables
- Regularity criteria via horizontal component of velocity for the Boussinesq equations in anisotropic Lorentz spaces
- Generalized Stević-Sharma operators from the minimal Möbius invariant space into Bloch-type spaces
- On initial value problem for elliptic equation on the plane under Caputo derivative
- A dimension expanded preconditioning technique for block two-by-two linear equations
- Asymptotic behavior of Fréchet functional equation and some characterizations of inner product spaces
- Small perturbations of critical nonlocal equations with variable exponents
- Dynamical property of hyperspace on uniform space
- Some notes on graded weakly 1-absorbing primary ideals
- On the problem of detecting source points acting on a fluid
- Integral transforms involving a generalized k-Bessel function
- Ruled real hypersurfaces in the complex hyperbolic quadric
- On the monotonic properties and oscillatory behavior of solutions of neutral differential equations
- Approximate multi-variable bi-Jensen-type mappings
- Mixed-type SP-iteration for asymptotically nonexpansive mappings in hyperbolic spaces
- On the equation fn + (f″)m ≡ 1
- Results on the modified degenerate Laplace-type integral associated with applications involving fractional kinetic equations
- Characterizations of entire solutions for the system of Fermat-type binomial and trinomial shift equations in ℂn#
- Commentary
- On I. Meghea and C. S. Stamin review article “Remarks on some variants of minimal point theorem and Ekeland variational principle with applications,” Demonstratio Mathematica 2022; 55: 354–379
- Special Issue on Fixed Point Theory and Applications to Various Differential/Integral Equations - Part II
- On Cauchy problem for pseudo-parabolic equation with Caputo-Fabrizio operator
- Fixed-point results for convex orbital operators
- Asymptotic stability of equilibria for difference equations via fixed points of enriched Prešić operators
- Asymptotic behavior of resolvents of equilibrium problems on complete geodesic spaces
- A system of additive functional equations in complex Banach algebras
- New inertial forward–backward algorithm for convex minimization with applications
- Uniqueness of solutions for a ψ-Hilfer fractional integral boundary value problem with the p-Laplacian operator
- Analysis of Cauchy problem with fractal-fractional differential operators
- Common best proximity points for a pair of mappings with certain dominating property
- Investigation of hybrid fractional q-integro-difference equations supplemented with nonlocal q-integral boundary conditions
- The structure of fuzzy fractals generated by an orbital fuzzy iterated function system
- On the structure of self-affine Jordan arcs in ℝ2
- Solvability for a system of Hadamard-type hybrid fractional differential inclusions
- Three solutions for discrete anisotropic Kirchhoff-type problems
- On split generalized equilibrium problem with multiple output sets and common fixed points problem
- Special Issue on Computational and Numerical Methods for Special Functions - Part II
- Sandwich-type results regarding Riemann-Liouville fractional integral of q-hypergeometric function
- Certain aspects of Nörlund ℐ-statistical convergence of sequences in neutrosophic normed spaces
- On completeness of weak eigenfunctions for multi-interval Sturm-Liouville equations with boundary-interface conditions
- Some identities on generalized harmonic numbers and generalized harmonic functions
- Study of degenerate derangement polynomials by λ-umbral calculus
- Normal ordering associated with λ-Stirling numbers in λ-shift algebra
- Analytical and numerical analysis of damped harmonic oscillator model with nonlocal operators
- Compositions of positive integers with 2s and 3s
- Kinematic-geometry of a line trajectory and the invariants of the axodes
- Hahn Laplace transform and its applications
- Discrete complementary exponential and sine integral functions
- Special Issue on Recent Methods in Approximation Theory - Part II
- On the order of approximation by modified summation-integral-type operators based on two parameters
- Bernstein-type operators on elliptic domain and their interpolation properties
- A class of strongly convergent subgradient extragradient methods for solving quasimonotone variational inequalities
- Special Issue on Recent Advances in Fractional Calculus and Nonlinear Fractional Evaluation Equations - Part II
- Application of fractional quantum calculus on coupled hybrid differential systems within the sequential Caputo fractional q-derivatives
- On some conformable boundary value problems in the setting of a new generalized conformable fractional derivative
- A certain class of fractional difference equations with damping: Oscillatory properties
- Weighted Hermite-Hadamard inequalities for r-times differentiable preinvex functions for k-fractional integrals
- Special Issue on Recent Advances for Computational and Mathematical Methods in Scientific Problems - Part II
- The behavior of hidden bifurcation in 2D scroll via saturated function series controlled by a coefficient harmonic linearization method
- Phase portraits of two classes of quadratic differential systems exhibiting as solutions two cubic algebraic curves
- Petri net analysis of a queueing inventory system with orbital search by the server
- Asymptotic stability of an epidemiological fractional reaction-diffusion model
- On the stability of a strongly stabilizing control for degenerate systems in Hilbert spaces
- Special Issue on Application of Fractional Calculus: Mathematical Modeling and Control - Part I
- New conticrete inequalities of the Hermite-Hadamard-Jensen-Mercer type in terms of generalized conformable fractional operators via majorization
- Pell-Lucas polynomials for numerical treatment of the nonlinear fractional-order Duffing equation
- Impacts of Brownian motion and fractional derivative on the solutions of the stochastic fractional Davey-Stewartson equations
- Some results on fractional Hahn difference boundary value problems
- Properties of a subclass of analytic functions defined by Riemann-Liouville fractional integral applied to convolution product of multiplier transformation and Ruscheweyh derivative
- Special Issue on Development of Fuzzy Sets and Their Extensions - Part I
- The cross-border e-commerce platform selection based on the probabilistic dual hesitant fuzzy generalized dice similarity measures
- Comparison of fuzzy and crisp decision matrices: An evaluation on PROBID and sPROBID multi-criteria decision-making methods
- Rejection and symmetric difference of bipolar picture fuzzy graph
Artikel in diesem Heft
- Regular Articles
- A novel class of bipolar soft separation axioms concerning crisp points
- Duality for convolution on subclasses of analytic functions and weighted integral operators
- Existence of a solution to an infinite system of weighted fractional integral equations of a function with respect to another function via a measure of noncompactness
- On the existence of nonnegative radial solutions for Dirichlet exterior problems on the Heisenberg group
- Hyers-Ulam stability of isometries on bounded domains-II
- Asymptotic study of Leray solution of 3D-Navier-Stokes equations with exponential damping
- Semi-Hyers-Ulam-Rassias stability for an integro-differential equation of order 𝓃
- Jordan triple (α,β)-higher ∗-derivations on semiprime rings
- The asymptotic behaviors of solutions for higher-order (m1, m2)-coupled Kirchhoff models with nonlinear strong damping
- Approximation of the image of the Lp ball under Hilbert-Schmidt integral operator
- Best proximity points in ℱ-metric spaces with applications
- Approximation spaces inspired by subset rough neighborhoods with applications
- A numerical Haar wavelet-finite difference hybrid method and its convergence for nonlinear hyperbolic partial differential equation
- A novel conservative numerical approximation scheme for the Rosenau-Kawahara equation
- Fekete-Szegö functional for a class of non-Bazilevic functions related to quasi-subordination
-
On local fractional integral inequalities via generalized
- On some geometric results for generalized k-Bessel functions
- Convergence analysis of M-iteration for 𝒢-nonexpansive mappings with directed graphs applicable in image deblurring and signal recovering problems
- Some results of homogeneous expansions for a class of biholomorphic mappings defined on a Reinhardt domain in ℂn
- Graded weakly 1-absorbing primary ideals
- The existence and uniqueness of solutions to a functional equation arising in psychological learning theory
- Some aspects of the n-ary orthogonal and b(αn,βn)-best approximations of b(αn,βn)-hypermetric spaces over Banach algebras
- Numerical solution of a malignant invasion model using some finite difference methods
- Increasing property and logarithmic convexity of functions involving Dirichlet lambda function
- Feature fusion-based text information mining method for natural scenes
- Global optimum solutions for a system of (k, ψ)-Hilfer fractional differential equations: Best proximity point approach
- The study of solutions for several systems of PDDEs with two complex variables
- Regularity criteria via horizontal component of velocity for the Boussinesq equations in anisotropic Lorentz spaces
- Generalized Stević-Sharma operators from the minimal Möbius invariant space into Bloch-type spaces
- On initial value problem for elliptic equation on the plane under Caputo derivative
- A dimension expanded preconditioning technique for block two-by-two linear equations
- Asymptotic behavior of Fréchet functional equation and some characterizations of inner product spaces
- Small perturbations of critical nonlocal equations with variable exponents
- Dynamical property of hyperspace on uniform space
- Some notes on graded weakly 1-absorbing primary ideals
- On the problem of detecting source points acting on a fluid
- Integral transforms involving a generalized k-Bessel function
- Ruled real hypersurfaces in the complex hyperbolic quadric
- On the monotonic properties and oscillatory behavior of solutions of neutral differential equations
- Approximate multi-variable bi-Jensen-type mappings
- Mixed-type SP-iteration for asymptotically nonexpansive mappings in hyperbolic spaces
- On the equation fn + (f″)m ≡ 1
- Results on the modified degenerate Laplace-type integral associated with applications involving fractional kinetic equations
- Characterizations of entire solutions for the system of Fermat-type binomial and trinomial shift equations in ℂn#
- Commentary
- On I. Meghea and C. S. Stamin review article “Remarks on some variants of minimal point theorem and Ekeland variational principle with applications,” Demonstratio Mathematica 2022; 55: 354–379
- Special Issue on Fixed Point Theory and Applications to Various Differential/Integral Equations - Part II
- On Cauchy problem for pseudo-parabolic equation with Caputo-Fabrizio operator
- Fixed-point results for convex orbital operators
- Asymptotic stability of equilibria for difference equations via fixed points of enriched Prešić operators
- Asymptotic behavior of resolvents of equilibrium problems on complete geodesic spaces
- A system of additive functional equations in complex Banach algebras
- New inertial forward–backward algorithm for convex minimization with applications
- Uniqueness of solutions for a ψ-Hilfer fractional integral boundary value problem with the p-Laplacian operator
- Analysis of Cauchy problem with fractal-fractional differential operators
- Common best proximity points for a pair of mappings with certain dominating property
- Investigation of hybrid fractional q-integro-difference equations supplemented with nonlocal q-integral boundary conditions
- The structure of fuzzy fractals generated by an orbital fuzzy iterated function system
- On the structure of self-affine Jordan arcs in ℝ2
- Solvability for a system of Hadamard-type hybrid fractional differential inclusions
- Three solutions for discrete anisotropic Kirchhoff-type problems
- On split generalized equilibrium problem with multiple output sets and common fixed points problem
- Special Issue on Computational and Numerical Methods for Special Functions - Part II
- Sandwich-type results regarding Riemann-Liouville fractional integral of q-hypergeometric function
- Certain aspects of Nörlund ℐ-statistical convergence of sequences in neutrosophic normed spaces
- On completeness of weak eigenfunctions for multi-interval Sturm-Liouville equations with boundary-interface conditions
- Some identities on generalized harmonic numbers and generalized harmonic functions
- Study of degenerate derangement polynomials by λ-umbral calculus
- Normal ordering associated with λ-Stirling numbers in λ-shift algebra
- Analytical and numerical analysis of damped harmonic oscillator model with nonlocal operators
- Compositions of positive integers with 2s and 3s
- Kinematic-geometry of a line trajectory and the invariants of the axodes
- Hahn Laplace transform and its applications
- Discrete complementary exponential and sine integral functions
- Special Issue on Recent Methods in Approximation Theory - Part II
- On the order of approximation by modified summation-integral-type operators based on two parameters
- Bernstein-type operators on elliptic domain and their interpolation properties
- A class of strongly convergent subgradient extragradient methods for solving quasimonotone variational inequalities
- Special Issue on Recent Advances in Fractional Calculus and Nonlinear Fractional Evaluation Equations - Part II
- Application of fractional quantum calculus on coupled hybrid differential systems within the sequential Caputo fractional q-derivatives
- On some conformable boundary value problems in the setting of a new generalized conformable fractional derivative
- A certain class of fractional difference equations with damping: Oscillatory properties
- Weighted Hermite-Hadamard inequalities for r-times differentiable preinvex functions for k-fractional integrals
- Special Issue on Recent Advances for Computational and Mathematical Methods in Scientific Problems - Part II
- The behavior of hidden bifurcation in 2D scroll via saturated function series controlled by a coefficient harmonic linearization method
- Phase portraits of two classes of quadratic differential systems exhibiting as solutions two cubic algebraic curves
- Petri net analysis of a queueing inventory system with orbital search by the server
- Asymptotic stability of an epidemiological fractional reaction-diffusion model
- On the stability of a strongly stabilizing control for degenerate systems in Hilbert spaces
- Special Issue on Application of Fractional Calculus: Mathematical Modeling and Control - Part I
- New conticrete inequalities of the Hermite-Hadamard-Jensen-Mercer type in terms of generalized conformable fractional operators via majorization
- Pell-Lucas polynomials for numerical treatment of the nonlinear fractional-order Duffing equation
- Impacts of Brownian motion and fractional derivative on the solutions of the stochastic fractional Davey-Stewartson equations
- Some results on fractional Hahn difference boundary value problems
- Properties of a subclass of analytic functions defined by Riemann-Liouville fractional integral applied to convolution product of multiplier transformation and Ruscheweyh derivative
- Special Issue on Development of Fuzzy Sets and Their Extensions - Part I
- The cross-border e-commerce platform selection based on the probabilistic dual hesitant fuzzy generalized dice similarity measures
- Comparison of fuzzy and crisp decision matrices: An evaluation on PROBID and sPROBID multi-criteria decision-making methods
- Rejection and symmetric difference of bipolar picture fuzzy graph