License Plate Recognition in Urban Road Based on Vehicle Tracking and Result Integration
-
Liping Zhu

 ,
Shang Wang
,
Shang Wang

Abstract
Multiple surveillance cameras provide huge video resources that need further mining to collect traffic stream data such as license plate recognition (LPR). However, these surveillance cameras have limited spatial resolution, which may not always suffice to precisely recognize license plates by existing LPR systems. This work is focused on the LPR method in low-quality images from surveillance video screenshots on urban road. The methodology we proposed is based on vehicle tracking and result integration, and we recognize the plate with an end-to-end method without character segmentation. First, we track each vehicle to get vehicle tracking sequence. Moreover, a plate detector based on an object detection framework is trained to detect license plates of each vehicle from the sequence and a license plate sequence is formed. In addition, an end-to-end convolutional neural network architecture is applied to recognize license plates from the sequence. Finally, we integrate the recognition result of continuous frames to get the final result. Evaluation results on multiple datasets show that our method significantly outperforms others without segmentation or integration in real traffic scene.
1 Introduction
License plate recognition (LPR) is a common and key function of intelligent traffic system. Based on the LPR system, there are some common application instances such as traffic flow analysis, parking violation enforcement, and automatic vehicle speed measurement.
However, the real traffic environment in urban road is complicated. Usually, license plate images are too vague to be recognized, which means that the pixels are lower than 32 × 100 and the rotation angle is beyond −10° to 10°. Other problems such as partly blocking and uneven illumination also affect the recognition results. Under the above conditions, extracting features from images only may not perform well. To alleviate this situation, some papers came up with new methods that connect license plate images from video stream.
In Figure 1, we propose an LPR framework based on vehicle tracking and result integration. At first, we track one vehicle from video stream and get its trajectory sequence. Then, license plate images and recognition results are collected through the convolutional neural network (CNN) model. At last, the results are integrated based on some features, such as the frequency of each character shown or the total confidence of each label. Our framework can complement advantages of each recognition result and eliminate the bad cases. The experiment results show that the LPR framework is robust to most kinds of situations.

Framework of the LPR System Based on Vehicle Tracking and Result Integration.
2 Related Work
The LPR system mainly consists of two function parts: license plate detection and character recognition. Several approaches of license plate detection were mentioned in Refs. [4], [11], [12], [20], [22], [27], but we do this with object detection algorithms [6], [7], [14], [16], [17], [18], [19] based on deep learning. Single-shot multibox detector (SSD) [14] is selected as the method to locate license plates in the manuscript.
2.1 Segmentation-Based LPR
Traditional methods of LPR are typically based on optical character recognition (OCR) techniques and they take segmentation as a previous step of recognition. Qiao et al. [15] used histograms of pixels projected horizontally and vertically to locate positions of characters and separated them along the projected axis. In contrast, Anagnostopoulos et al. [1], Giannoukos et al. [5], and Chang et al. [2] used connected component techniques, which separated the characters in binarized license plate images depending on four or eight neighborhood connectivity. As the development of machine learning, Wen et al. [26] and Thome et al. [24] proposed that OCR can be replaced with classifiers based on machine learning, which improved recognition rate obviously. The disadvantage of segmentation-based LPR methods was their sensitivity to rotation and distortion because of the significant influence of segmentation. A robust way of recognition is imperative to seek.
2.2 Deep Learning-Based LPR
With the development of deep learning and its successful application, some novel methods have been adopted in the LPR system. Cheang et al. [3], Jain et al. [9], and Špaňhel et al. [23] applied deep neural network to LPR without character segmentation. The features of license plate images were extracted directly by CNN and used to train an LPR model. Compared to the segmentation-based method, this method was more robust. However, it usually did not have good performance because license plate images are not clear enough in real traffic scenes.
2.3 Time Sequence-Based LPR
The methods we mentioned above could not recognize license plates accurately in real traffic scenes; thus, some new research intended to study the recognition based on time sequence. Li and Shen [13] combined recurrent neural network and long short-term memory to train a model of feature sequence of license plate images leading to a better recognition performance of CNN. According to vehicle trajectory, Seibel et al. [21] got several license plate images at different moments. These images with poor resolution were integrated to a single super-resolution image. Then, they used normal LPR algorithm to recognize the license plate. Wang et al. [25] tried to generate synthetic training data with generative adversarial networks to improve the recognition rate based on a moving camera. Although the time-sequence information was mentioned in these papers, it was just used to train models or fix up the images.
Time-sequence information is used to integrate all recognition results, and we can get an affirmatory result. Excluding the bad cases, the final result is much closer to the true label. Our method outperforms surveillance videos in real traffic scenes.
3 Methodology
3.1 Process
The process of the proposed method consists of three steps: vehicle detection and tracking, plate detection based on trajectory, and plate recognition. The first step is to detect and track vehicles based on SSD algorithm. In addition, we apply a trained plate detector model also based on SSD to locate the license plates. Then, we recognize the plates using a well-trained CNN model. In the last step, several recognition plate results are integrated to one final plate result referring to the frequency or confidence of each character.
3.2 Vehicle Detection and Tracking
We locate the vehicle in each frame of the surveillance video. Tracking process is to line up the vehicle images to establish the trajectory of each vehicle. We use a similarity model to judge if the vehicles of two neighboring frames are matched. The similarity of two objects is estimated with the help of color histogram, Jaccard overlap, and cell matching similarity between two object patches.
In the vehicle similarity computing process, the widely used features are color histogram [10] and cell matching similarity. In addition, we added the Jaccard similarity to the final similarity result, which ruminates the little change in the spatial space for a vehicle in the adjacent frames. Figure 2 gives the procedure of vehicle similarity computing.
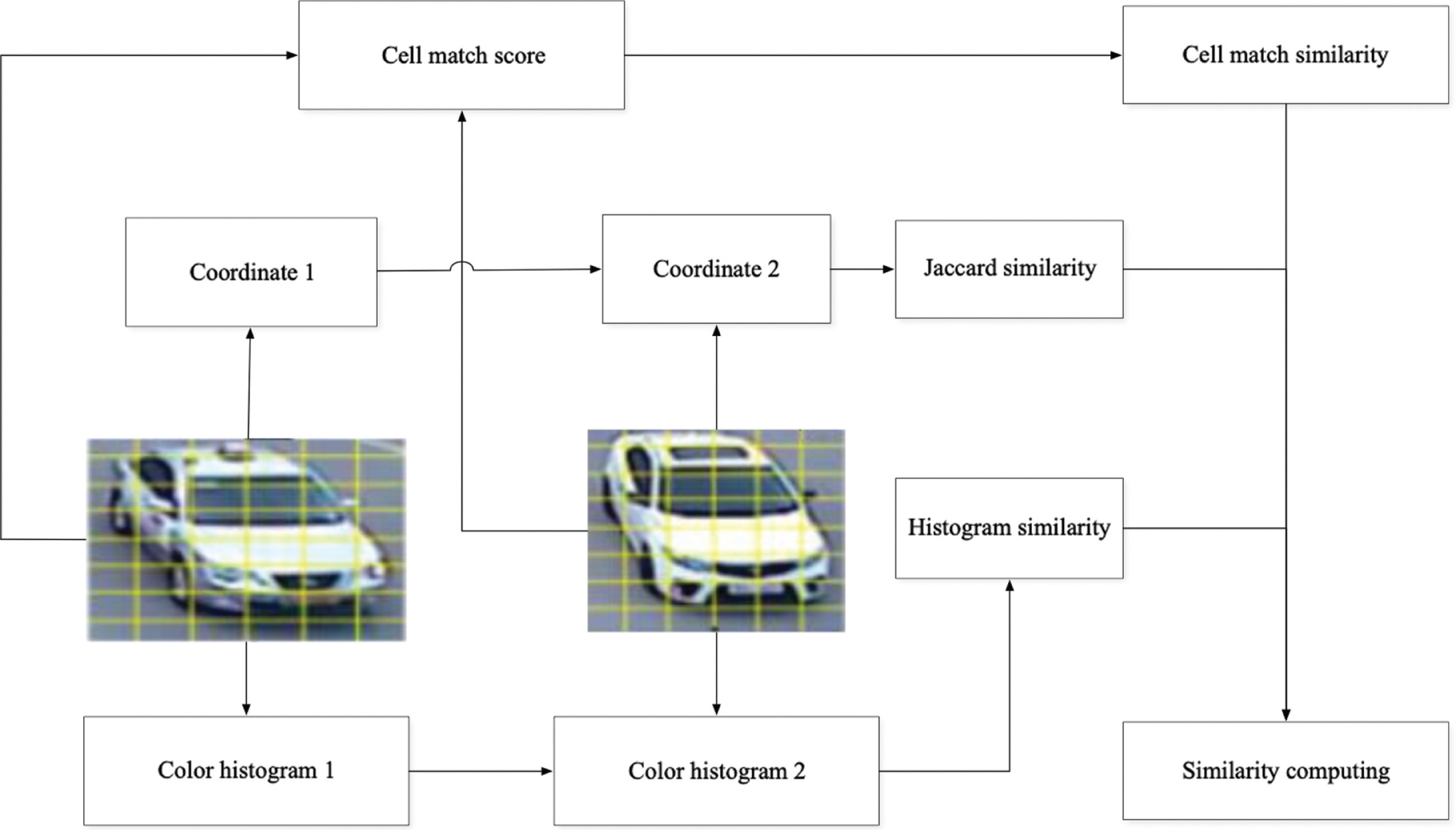
Procedure of Computing the Similarity between Two Objects.
In the similarity computing process, the color histogram with 24 bins with each RGB channel is spat into 8 bins. The color histogram is normalized by
The correlation of the two histograms is calculated by the Pearson product-moment correlation coefficient equation, which is
The Jaccard coefficient measures the similarity between finite sample sets and is defined as “the size of the intersection divided by the size of the union of the sample sets”. The computing process is intuitively given by
To estimate the image matching score, we divide the image into 6 × 8 cells. For each cell, the mean and variance of pixels are computed. The distance of two cells is
The final cell matching similarity of two images is
The similarity of the two detected objects consists of three parts: histogram similarity, cell matching similarity, and Jaccard similarity, which can be expressed as
3.3 License Plate Detection
As the primary step of the LPR system, license plate detection has great influence on both recognition speed and rate. In our work, we use SSD to locate the license plates. The precision and recall of license plate detection are 82.5% and 89%, respectively, under the real environment of urban road.
3.4 End-to-End LPR System
DenseNet169 is chosen as the CNN architecture to extract features, and three fully connected (fc) layers are added behind that. The second and third fc layers are both sliced to seven layers. Each layer of fc8 outputs different numbers of feature maps based on each character’s class. For example, fc8_1 outputs 31 feature maps because fc8_1 represents Chinese characters and it has 31 classes. Figure 3 shows the schematic diagram of our model.
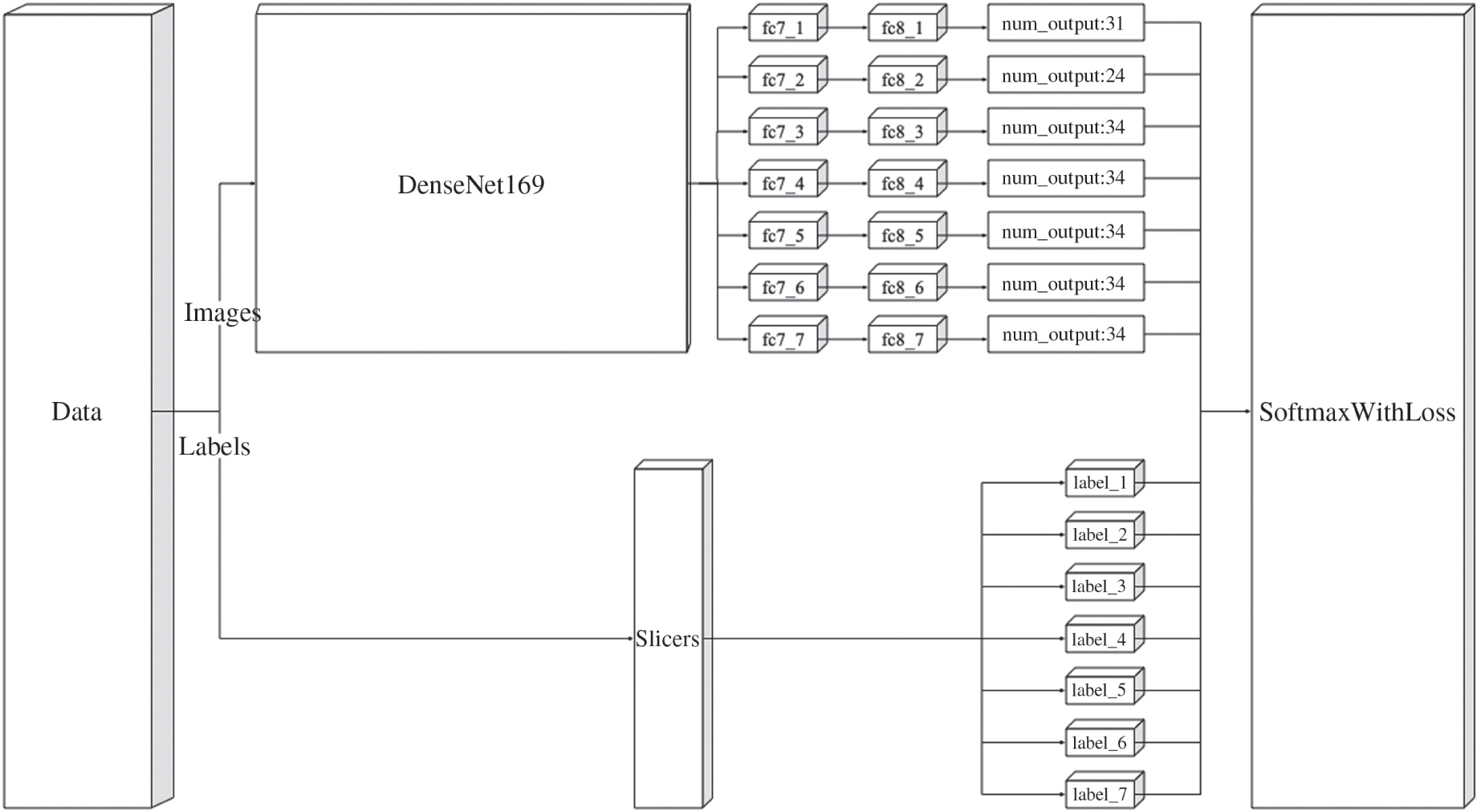
CNN Architecture.
Based on multilabel learning, we can build an end-to-end model of Chinese LPR. There are seven characters on a Chinese license plate.
Because of the poor recognition on Chinese characters, it is ignored in this paper. We mainly focus on the recognition of numbers and English letters.
3.5 Integration of LPR Results
However, license plate images are too blurred to be recognized just by the LPR system under the environment of real urban road. The integration of recognition results becomes a trend. Based on vehicle trajectory, we get vehicle tracking sequence of one vehicle. After license plate detection and recognition, the integration of all the results will be done. We propose two methods for result integration and they are frequency and confidence based correspondingly.
3.5.1 Integration Based on Frequency
Counting results based on frequency of each character’s recognition result is the simplest method as far as we are concerned. According to the literal meaning, we count the number of each result’s occurrence of each character and figure out the most frequent one. Then, we line them up to get the final result.
Figure 4 shows us an example of a plate numbered “JAM301”. During vehicle tracking, we catch this plate five times. However, the LPR result of each frame is not correct. What we need to do is to integrate the recognition result on each character. The most frequent label of the first character’s recognition result is “J”, which appears five times. The most frequent result of the second character is “A”, whose frequency is 3. The rest concluded in this way are “M”, “3”, “0”, and “1” separately. Therefore, the integration result is “JAM301”, which is the correct number of this plate.
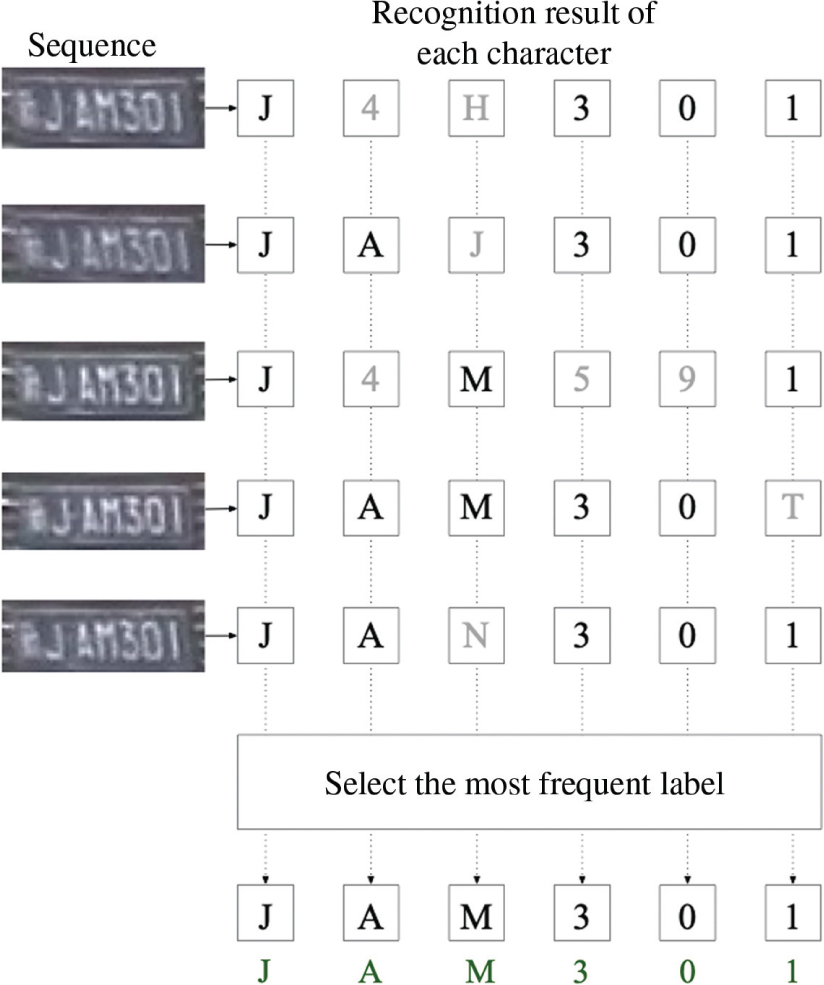
Integration Based on Frequency.
This method is better than LPR without result integration, but it is not convincing enough as shown by the experiments.
3.5.2 Integration Based on Confidence
Because the method of counting frequencies is not convincing, another way, which is counting confidences, is proposed. One character has only one recognition result, whereas, thanks to Softmax, each label associated is given a confidence to represent the probability to be the true value. What we should do is to count these confidences and find the label with the maximum confidence. This label is the result of the character that we are looking for.
Figure 5 demonstrates an example LPR of a plate numbered “JT0354”. For convenience, some of recognition results are omitted. At each recognition result, we give four label ordered by confidence at each character. The confidence of each label is shown behind the label in each table. Taking the first character, which is “J”, as an example, during the trajectory sequence, we compute the sum of each label’s confidence and select the maximum one as the eventual result and we can get the eventual recognition result of the first character, which is “J”. This method is used on the rest of the characters, and we can get “JT0354” in order, which is the final recognition result of this plate.
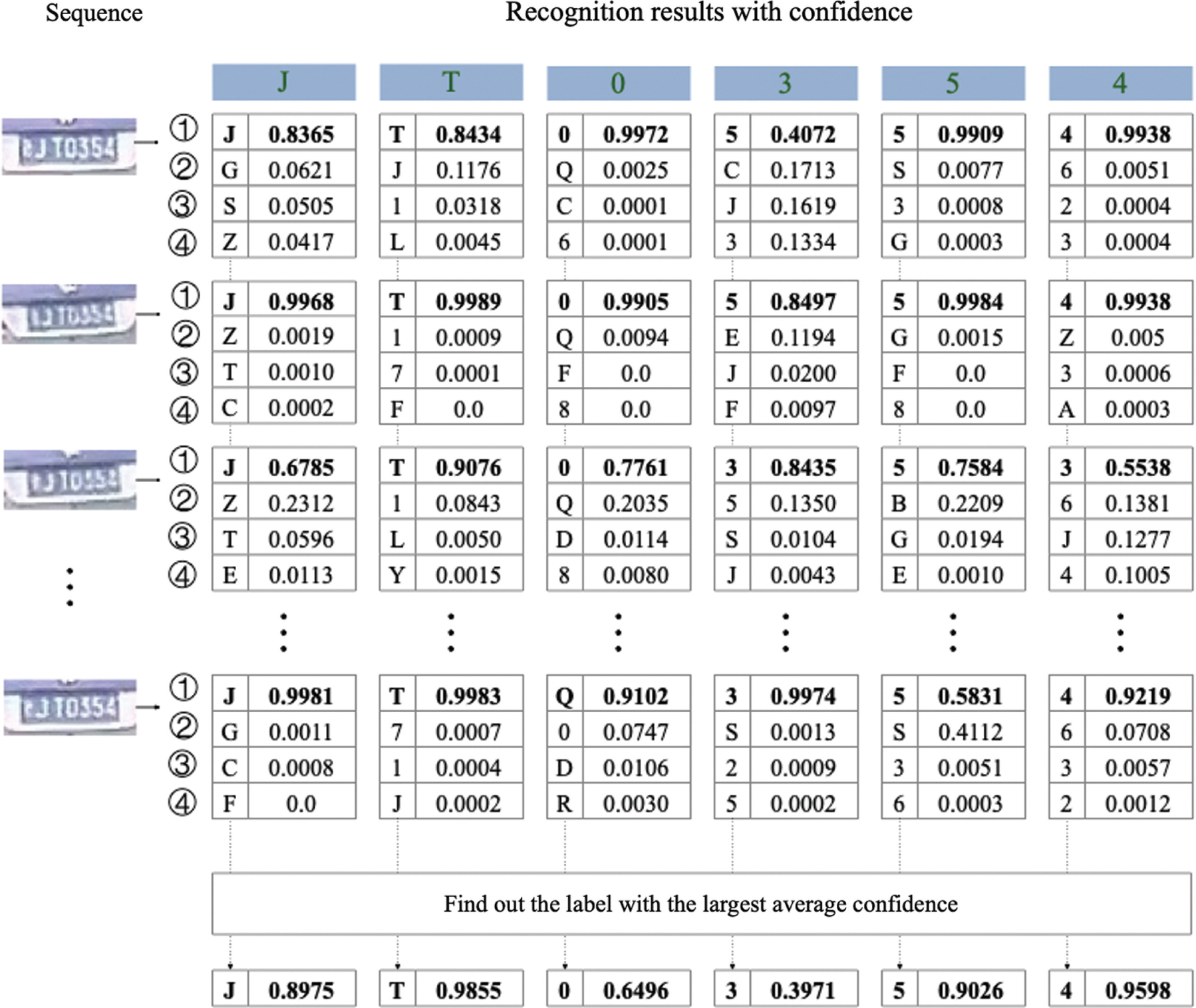
Integration Based on Confidence.
This method is efficient and it can be verified by the experiment.
4 Experiment
4.1 Datasets
XJ_ReId. In Figure 6A, this is our own dataset captured from surveillance video of real urban road in China. Based on vehicle trajectory tracking algorithm [28] and SSD, we collected 19,020 images from 1033 vehicles. For convenience, we only marked the last six characters, ignoring the Chinese character.

Example Images of Three Datasets: (A) XJ_ReId, (B) ReId, and (C) HDR.
ReId. Špaňhel et al. [23] collected 182,336 license plate images of different lengths, image blur, and slight occlusion on Europe real urban road. This dataset belongs to 8762 vehicles and they selected 105,924 images for training and 76,412 images for testing. Some instances are given in Figure 6B.
HDR. This dataset was also collected by Špaňhel et al. [23]. Pictures were captured by a digital single lens reflex camera with three different exposures. There are 652 images in it, which belong to 299 vehicles, and this dataset is just used for testing. These images contain rotated license plates that are of different types than the ones used for training. Figure 6C shows some samples of this dataset.
4.2 Comparative Experiment
Different LPR methods were taken as control group in the experiment.
EasyPR. EasyPR is an open source system for LPR written in C++ based on OpenCV computer vision library. It can detect and recognize Chinese license plate with high quality. In the experiment, detection phase was skipped and LPR was evaluated on cropped images.
OpenALPR. OpenALPR is an open source library for Automatic LPR written in C++. It is based on OpenCV computer vision library and Tesseract OCR and mainly used in EU license plates. Like EasyPR, the detection phase is skipped too.
SOTA. As a comparison, we reproduce a state-of-the art paper [8]. The SOTA method consists of four modules: image acquisition, license plate extraction, segmentation and recognition. In the experiment, the segmentation and recognition part of this method is evaluated by all of the datasets above.
Holistic. Holistic is a segmentation-free method and based on the end-to-end theory to recognize license plate images with low quality [23]. This method is robust and allows an angle between the camera and the license plate.
Because there are six characters in EU and Chinese license plate (ignoring Chinese character), we use Acc6, Acc5, and Acc4 to evaluate the recognition rate. Acc6 represents that the recognition result matches the label perfectly. Acc5 indicates that not less than five characters are recognized correctly. In the same way, Acc4 means at least four correctly recognized characters.
4.3 Experimental Results and Analysis
Holistic LPR methods with distinct kinds of CNN architectures have different recognition rates and several kinds of CNN models are applied for LPR. Table 1 shows the impacts of different CNN architecture on Holistic LPR methods. Processing speed was measured on a PC with Xeon@2.6 GHz and GTX 1080.
Evaluation of Holistic LPR Methods based on Different CNN Architecture.
| System | Acc6/Acc5/Acc4(%) |
Speed (ms) |
||
|---|---|---|---|---|
| XJ_ReId | ReId | HDR | GPU | |
| ResNet50 | 41.53/57.98/69.38 | 87.91/95.98/97.53 | 59.53/82.61/91.97 | 0.48 |
| ResNet101 | 42.76/59.78/70.09 | 88.31/96.23/98.77 | 60.07/83.93/92.30 | 0.84 |
| DenseNet169 | 41.60/58.11/70.52 | 88.64/96.51/97.64 | 59.56/83.45/92.98 | 0.26 |
| DenseNet201 | 41.61/58.54/70.02 | 89.19/96.98/97.93 | 60.09/83.81/93.01 | 0.38 |
| Inception-v3 | 42.85/59.25/70.30 | 88.71/96.20/98.80 | 60.08/83.77/93.84 | 0.46 |
| CliqueNet-S3 | 39.09/55.93/66.93 | 83.76/92.83/94.87 | 60.01/81.93/92.19 | 0.27 |
Bold values represent the highest ACC values among these methods.
Considering the accuracy and speed, DenseNet169 is selected as the basic CNN architecture for the Holistic LPR method. Table 2 gives the evaluation of different LPR methods on each dataset.
Result of a Comparative Experiment.
| System | Acc6/Acc5/Acc4(%) |
||
|---|---|---|---|
| XJ_ReId | ReId | HDR | |
| EasyPR | 41.96/50.59/66.07 | – | – |
| OpenALPR | – | 34.00/50.59/66.07 | 40.00/50.59/66.07 |
| SOTA | 41.13/49.17/65.72 | 85.33/92.24/96.52 | 58.14/80.26/90.87 |
| Holistic | 41.60/58.11/70.52 | 88.64/96.51/97.64 | 59.56/83.45/92.98 |
| Ours (frequency) | 42.21/59.44/73.67 | 89.60/96.83/97.87 | 60.20/84.28/93.64 |
| Ours (confidence) | 47.44/63.03/76.94 | 89.80/96.91/97.95 | 62.21/84.95/93.65 |
Bold values represent the highest ACC values among these methods.
The number of continuous frames may have an effect on recognition rate. We separate the license plate sequences according to the number of continuous frames and calculate the Acc6 on each number. We found that there is little change of accuracy when enough information about the plate is given. Table 1 reveals that different kinds of CNN architecture have a negligible effect on LPR accuracy. Owing to the advantage on speed, DenseNet169 is selected as the basic CNN architecture on the Holistic method.
In Table 2, EasyPR, Holistic, and SOTA are about the same performance on XJ_ReId, which is our own dataset. Moreover, our method has a significant improvement on the same dataset. As for the two methods of result integration, the one based on confidence performs better than the one based on frequency; even the latter has a huge increase on the Holistic way. For further experiment, we take the public datasets, ReId and HDR, as comparison. The result shows that our method has better accuracy than other methods.
Through the evaluation, we can be sure that the number of continuous frames could affect the recognition rate. We acknowledge that the recognition rate will get better as the number of continuous frames increases, and the minimum number to collect the frames is 40, 30, and 30 for each dataset.
Figure 7 shows some possible situations in the real scene. All the LPR methods recognize the license plate accurately in Figure 7A. In Figure 7B and C, our method corrects the results of Holistic. Sometimes, the results of our method are not satisfactory such as the instance shown in Figure 7D. Fortunately, we do not need to worry about this situation because it appears rarely and does not make the result worse.
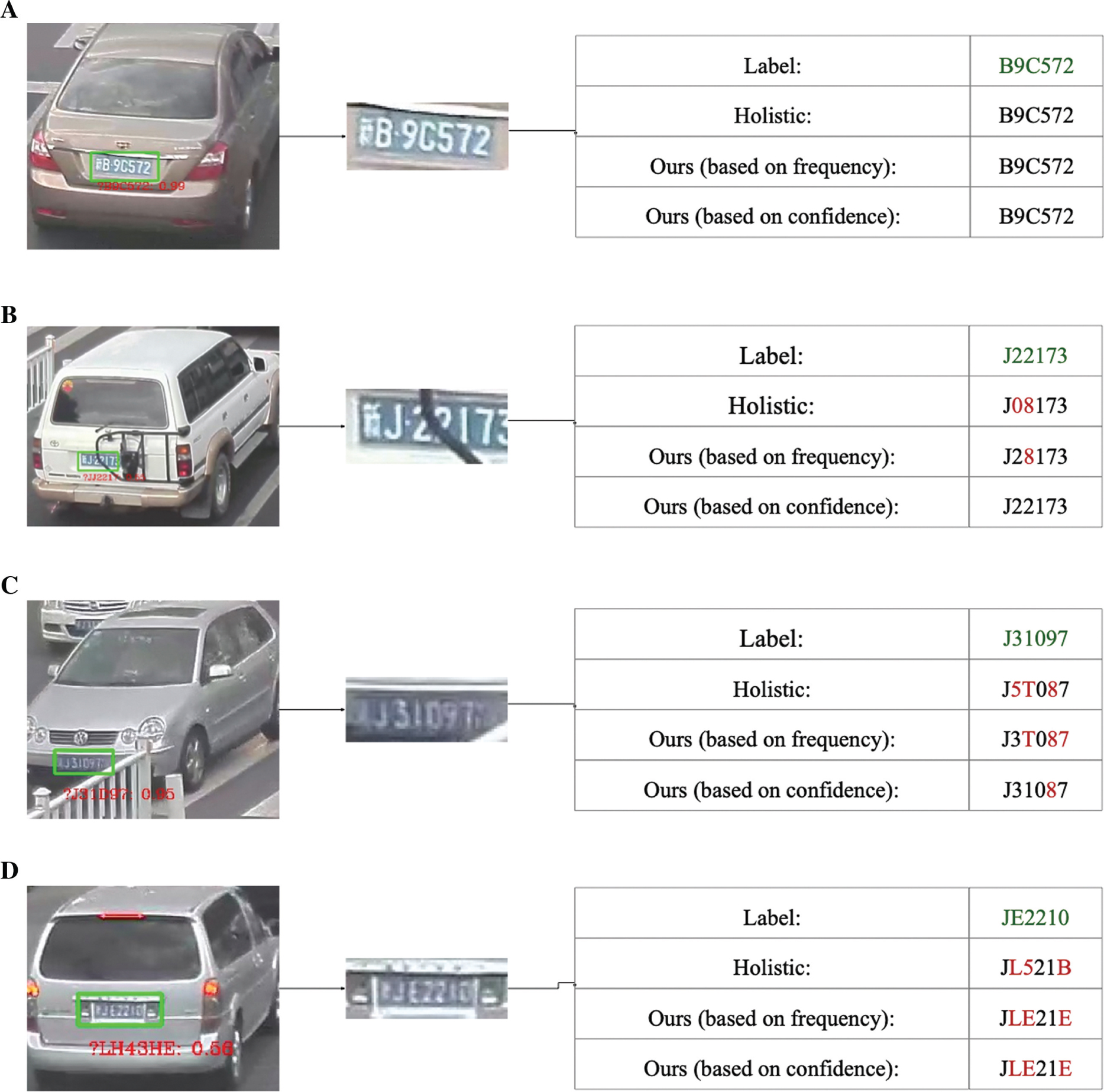
Comparison between Holistic and our methods on some possible situations in the real scene.
(A) The license plate is clear, (B and C) the license plate is slightly obscured or has low ambiguity, (D) the license plate has high ambiguity.
It can be seen from the experimental result that our method can filter out the bad case in the license plate sequence and integrate all the optimal recognition results. Under the environment of real urban road, we believe that our method could have a remarkable performance.
5 Conclusions
This paper presents an end-to-end LPR method based on result integration, which takes good use of timing-sequence information. Evaluation proves that the segmentation-free LPR method is robust to various illumination, rotation, occlusion, and image blur. Furthermore, the integration of the recognition results can exclude some wrong cases and form a more accurate result. It also shows that our method significantly outperforms existing open-source and state-of-the art solutions on several datasets, whereas the processing speed is comparable when used on GPUs, and our solution is easy to use on GPUs.
In a word, our method is feasible and accurate on real traffic scenes, which will be well applied in surveillance videos of crossroads or urban road without electronic police.
Bibliography
[1] C. N. E. Anagnostopoulos, I. E. Anagnostopoulos, V. Loumos and E. Kayafas, A license plate-recognition algorithm for intelligent transportation system applications, IEEE Trans. Intell. Transport. Syst. 7 (2006), 377–392.10.1109/TITS.2006.880641Search in Google Scholar
[2] S.-L. Chang, L.-S. Chen, Y.-C. Chung and S.-W. Chen, Automatic license plate recognition, IEEE Trans. Intell. Transport. Syst. 5 (2004), 42–53.10.1109/TITS.2004.825086Search in Google Scholar
[3] T. K. Cheang, Y. S. Chong and Y. H. Tay, Segmentation-free vehicle license plate recognition using ConvNet-RNN, arXiv preprint arXiv:1701.06439 (2017).Search in Google Scholar
[4] N. F. Gazcón, C. I. Chesñevar and S. M. Castro, Automatic vehicle identification for Argentinean license plates using intelligent template matching, Pattern Recogn. Lett. 33 (2012), 1066–1074.10.1016/j.patrec.2012.02.004Search in Google Scholar
[5] I. Giannoukos, C.-N. Anagnostopoulos, V. Loumos and E. Kayafas, Operator context scanning to support high segmentation rates for real time license plate recognition, Pattern Recogn. 43 (2010), 3866–3878.10.1016/j.patcog.2010.06.008Search in Google Scholar
[6] R. Girshick, Fast r-cnn, in: Proceedings of the IEEE International Conference on Computer Vision (ICCV), pp. 1440–1448, Santiago, Chile, 2015.10.1109/ICCV.2015.169Search in Google Scholar
[7] R. Girshick, J. Donahue, T. Darrell and J. Malik, Rich feature hierarchies for accurate object detection and semantic segmentation, in: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pp. 580–587, Columbus, Ohio, 2014.10.1109/CVPR.2014.81Search in Google Scholar
[8] K. Indira, K. V. Mohan and T. Nikhilashwary, Automatic license plate recognition, in: Recent Trends in Signal and Image Processing, pp. 67–77, Springer, Singapore, 2019.10.1007/978-981-10-8863-6_8Search in Google Scholar
[9] V. Jain, Z. Sasindran, A. Rajagopal, S. Biswas, H. S. Bharadwaj and K. R. Ramakrishnan, Deep automatic license plate recognition system, in: Proceedings of the Tenth Indian Conference on Computer Vision, Graphics and Image Processing, p. 6, ACM, Guwahati, Assam, India, 2016.10.1145/3009977.3010052Search in Google Scholar
[10] K.-J. Kim, S.-M. Park and Y.-J. Choi, Deciding the number of color histogram bins for vehicle color recognition, in: 2008 IEEE Asia-Pacific Services Computing Conference, pp. 134–138, IEEE, Yilan, Taiwan, 2008.10.1109/APSCC.2008.207Search in Google Scholar
[11] K. I. Kim, K. Jung and H. J. Kim, Fast color texture-based object detection in images: Application to license plate localization, in: Support Vector Machines: Theory and Applications, pp. 297–320, Springer, Berlin, Heidelberg, 2005.10.1007/10984697_14Search in Google Scholar
[12] H. E. Kocer and K. K. Cevik, Artificial neural networks based vehicle license plate recognition, Procedia Comput. Sci. 3 (2011), 1033–1037.10.1016/j.procs.2010.12.169Search in Google Scholar
[13] H. Li and C. Shen, Reading car license plates using deep convolutional neural networks and LSTMs, arXiv preprint arXiv:1601.05610 (2016).Search in Google Scholar
[14] W. Liu, D. Anguelov, D. Erhan, C. Szegedy, S. Reed, C.-Y. Fu and A. C. Berg, SSD: Single shot multibox detector, in: European Conference on Computer Vision, pp. 21–37, Springer, Cham, 2016.10.1007/978-3-319-46448-0_2Search in Google Scholar
[15] S. Qiao, Y. Zhu, X. Li, T. Liu and B. Zhang, Research of improving the accuracy of license plate character segmentation, in: 2010 Fifth International Conference on Frontier of Computer Science and Technology, pp. 489–493, IEEE, Changchun, Jilin Province, China, 2010.10.1109/FCST.2010.75Search in Google Scholar
[16] J. Redmon, S. Divvala, R. Girshick and A. Farhadi, You only look once: Unified, real-time object detection, in: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pp. 779–788, Las Vegas, NV, USA, 2016.10.1109/CVPR.2016.91Search in Google Scholar
[17] J. Redmon and A. Farhadi, YOLO9000: Better, faster, stronger, in: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pp. 7263–7271, Honolulu, Hawaii, 2017.10.1109/CVPR.2017.690Search in Google Scholar
[18] J. Redmon and A. Farhadi, Yolov3: an incremental improvement, arXiv preprint arXiv:1804.02767 (2018).Search in Google Scholar
[19] S. Ren, K. He, R. Girshick and J. Sun, Faster r-cnn: Towards real-time object detection with region proposal networks, in: Advances in Neural Information Processing Systems (NIPS), pp. 91–99, Montreal, Canada, 2015.Search in Google Scholar
[20] G. A. Samra and F. Khalefah, Localization of license plate number using dynamic image processing techniques and genetic algorithms, IEEE Trans. Evol. Comput. 18 (2014), 244–257.10.1109/TEVC.2013.2255611Search in Google Scholar
[21] H. Seibel, S. Goldenstein and A. Rocha, Eyes on the target: Super-resolution and license-plate recognition in low-quality surveillance videos, IEEE Access 5 (2017), 20020–20035.10.1109/ACCESS.2017.2737418Search in Google Scholar
[22] B. Shan, Vehicle license plate recognition based on text-line construction and multilevel RBF neural network, JCP 6 (2011), 246–253.10.4304/jcp.6.2.246-253Search in Google Scholar
[23] J. Špaňhel, J. Sochor, R. Juránek, A. Herout, L. Maršík and P. Zemčík, Holistic recognition of low quality license plates by CNN using track annotated data, in: 2017 14th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), pp. 1–6, IEEE, Lecce, Italy, 2017.10.1109/AVSS.2017.8078501Search in Google Scholar
[24] N. Thome, A. Vacavant, L. Robinault and S. Miguet, A cognitive and video-based approach for multinational license plate recognition, Mach. Vis. Appl. 22 (2011), 389–407.10.1007/s00138-010-0246-3Search in Google Scholar
[25] X. Wang, Z. Man, M. You and C. Shen, Adversarial generation of training examples: Applications to moving vehicle license plate recognition, arXiv preprint arXiv:1707.03124 (2017).Search in Google Scholar
[26] Y. Wen, Y. Lu, J. Yan, Z. Zhou, K. M. von Deneen and P. Shi, An algorithm for license plate recognition applied to intelligent transportation system, IEEE Trans. Intell. Transport. Syst. 12 (2011), 830–845.10.1109/TITS.2011.2114346Search in Google Scholar
[27] M. Zahedi and S. M. Salehi, License plate recognition system based on SIFT features, Procedia Comput. Sci. 3 (2011), 998–1002.10.1016/j.procs.2010.12.164Search in Google Scholar
[28] Y. Zhang, J. Wang and X. Yang, Real-time vehicle detection and tracking in video based on faster R-CNN, J. Phys. Conf. Ser. 887 (2017), 012068.10.1088/1742-6596/887/1/012068Search in Google Scholar
©2020 Walter de Gruyter GmbH, Berlin/Boston
This work is licensed under the Creative Commons Attribution 4.0 Public License.
Articles in the same Issue
- An Optimized K-Harmonic Means Algorithm Combined with Modified Particle Swarm Optimization and Cuckoo Search Algorithm
- Texture Feature Extraction Using Intuitionistic Fuzzy Local Binary Pattern
- Leaf Disease Segmentation From Agricultural Images via Hybridization of Active Contour Model and OFA
- Deadline Constrained Task Scheduling Method Using a Combination of Center-Based Genetic Algorithm and Group Search Optimization
- Efficient Classification of DDoS Attacks Using an Ensemble Feature Selection Algorithm
- Distributed Multi-agent Bidding-Based Approach for the Collaborative Mapping of Unknown Indoor Environments by a Homogeneous Mobile Robot Team
- An Efficient Technique for Three-Dimensional Image Visualization Through Two-Dimensional Images for Medical Data
- Combined Multi-Agent Method to Control Inter-Department Common Events Collision for University Courses Timetabling
- An Improved Particle Swarm Optimization Algorithm for Global Multidimensional Optimization
- A Kernel Probabilistic Model for Semi-supervised Co-clustering Ensemble
- Pythagorean Hesitant Fuzzy Information Aggregation and Their Application to Multi-Attribute Group Decision-Making Problems
- Using an Efficient Optimal Classifier for Soil Classification in Spatial Data Mining Over Big Data
- A Bayesian Multiresolution Approach for Noise Removal in Medical Magnetic Resonance Images
- Gbest-Guided Artificial Bee Colony Optimization Algorithm-Based Optimal Incorporation of Shunt Capacitors in Distribution Networks under Load Growth
- Graded Soft Expert Set as a Generalization of Hesitant Fuzzy Set
- Universal Liver Extraction Algorithm: An Improved Chan–Vese Model
- Software Effort Estimation Using Modified Fuzzy C Means Clustering and Hybrid ABC-MCS Optimization in Neural Network
- Handwritten Indic Script Recognition Based on the Dempster–Shafer Theory of Evidence
- An Integrated Intuitionistic Fuzzy AHP and TOPSIS Approach to Evaluation of Outsource Manufacturers
- Automatically Assess Day Similarity Using Visual Lifelogs
- A Novel Bio-Inspired Algorithm Based on Social Spiders for Improving Performance and Efficiency of Data Clustering
- Discriminative Training Using Noise Robust Integrated Features and Refined HMM Modeling
- Self-Adaptive Mussels Wandering Optimization Algorithm with Application for Artificial Neural Network Training
- A Framework for Image Alignment of TerraSAR-X Images Using Fractional Derivatives and View Synthesis Approach
- Intelligent Systems for Structural Damage Assessment
- Some Interval-Valued Pythagorean Fuzzy Einstein Weighted Averaging Aggregation Operators and Their Application to Group Decision Making
- Fuzzy Adaptive Genetic Algorithm for Improving the Solution of Industrial Optimization Problems
- Approach to Multiple Attribute Group Decision Making Based on Hesitant Fuzzy Linguistic Aggregation Operators
- Cubic Ordered Weighted Distance Operator and Application in Group Decision-Making
- Fault Signal Recognition in Power Distribution System using Deep Belief Network
- Selector: PSO as Model Selector for Dual-Stage Diabetes Network
- Oppositional Gravitational Search Algorithm and Artificial Neural Network-based Classification of Kidney Images
- Improving Image Search through MKFCM Clustering Strategy-Based Re-ranking Measure
- Sparse Decomposition Technique for Segmentation and Compression of Compound Images
- Automatic Genetic Fuzzy c-Means
- Harmony Search Algorithm for Patient Admission Scheduling Problem
- Speech Signal Compression Algorithm Based on the JPEG Technique
- i-Vector-Based Speaker Verification on Limited Data Using Fusion Techniques
- Prediction of User Future Request Utilizing the Combination of Both ANN and FCM in Web Page Recommendation
- Presentation of ACT/R-RBF Hybrid Architecture to Develop Decision Making in Continuous and Non-continuous Data
- An Overview of Segmentation Algorithms for the Analysis of Anomalies on Medical Images
- Blind Restoration Algorithm Using Residual Measures for Motion-Blurred Noisy Images
- Extreme Learning Machine for Credit Risk Analysis
- A Genetic Algorithm Approach for Group Recommender System Based on Partial Rankings
- Improvements in Spoken Query System to Access the Agricultural Commodity Prices and Weather Information in Kannada Language/Dialects
- A One-Pass Approach for Slope and Slant Estimation of Tri-Script Handwritten Words
- Secure Communication through MultiAgent System-Based Diabetes Diagnosing and Classification
- Development of a Two-Stage Segmentation-Based Word Searching Method for Handwritten Document Images
- Pythagorean Fuzzy Einstein Hybrid Averaging Aggregation Operator and its Application to Multiple-Attribute Group Decision Making
- Ensembles of Text and Time-Series Models for Automatic Generation of Financial Trading Signals from Social Media Content
- A Flame Detection Method Based on Novel Gradient Features
- Modeling and Optimization of a Liquid Flow Process using an Artificial Neural Network-Based Flower Pollination Algorithm
- Spectral Graph-based Features for Recognition of Handwritten Characters: A Case Study on Handwritten Devanagari Numerals
- A Grey Wolf Optimizer for Text Document Clustering
- Classification of Masses in Digital Mammograms Using the Genetic Ensemble Method
- A Hybrid Grey Wolf Optimiser Algorithm for Solving Time Series Classification Problems
- Gray Method for Multiple Attribute Decision Making with Incomplete Weight Information under the Pythagorean Fuzzy Setting
- Multi-Agent System Based on the Extreme Learning Machine and Fuzzy Control for Intelligent Energy Management in Microgrid
- Deep CNN Combined With Relevance Feedback for Trademark Image Retrieval
- Cognitively Motivated Query Abstraction Model Based on Associative Root-Pattern Networks
- Improved Adaptive Neuro-Fuzzy Inference System Using Gray Wolf Optimization: A Case Study in Predicting Biochar Yield
- Predict Forex Trend via Convolutional Neural Networks
- Optimizing Integrated Features for Hindi Automatic Speech Recognition System
- A Novel Weakest t-norm based Fuzzy Fault Tree Analysis Through Qualitative Data Processing and Its Application in System Reliability Evaluation
- FCNB: Fuzzy Correlative Naive Bayes Classifier with MapReduce Framework for Big Data Classification
- A Modified Jaya Algorithm for Mixed-Variable Optimization Problems
- An Improved Robust Fuzzy Algorithm for Unsupervised Learning
- Hybridizing the Cuckoo Search Algorithm with Different Mutation Operators for Numerical Optimization Problems
- An Efficient Lossless ROI Image Compression Using Wavelet-Based Modified Region Growing Algorithm
- Predicting Automatic Trigger Speed for Vehicle-Activated Signs
- Group Recommender Systems – An Evolutionary Approach Based on Multi-expert System for Consensus
- Enriching Documents by Linking Salient Entities and Lexical-Semantic Expansion
- A New Feature Selection Method for Sentiment Analysis in Short Text
- Optimizing Software Modularity with Minimum Possible Variations
- Optimizing the Self-Organizing Team Size Using a Genetic Algorithm in Agile Practices
- Aspect-Oriented Sentiment Analysis: A Topic Modeling-Powered Approach
- Feature Pair Index Graph for Clustering
- Tangramob: An Agent-Based Simulation Framework for Validating Urban Smart Mobility Solutions
- A New Algorithm Based on Magic Square and a Novel Chaotic System for Image Encryption
- Video Steganography Using Knight Tour Algorithm and LSB Method for Encrypted Data
- Clay-Based Brick Porosity Estimation Using Image Processing Techniques
- AGCS Technique to Improve the Performance of Neural Networks
- A Color Image Encryption Technique Based on Bit-Level Permutation and Alternate Logistic Maps
- A Hybrid of Deep CNN and Bidirectional LSTM for Automatic Speech Recognition
- Database Creation and Dialect-Wise Comparative Analysis of Prosodic Features for Punjabi Language
- Trapezoidal Linguistic Cubic Fuzzy TOPSIS Method and Application in a Group Decision Making Program
- Histopathological Image Segmentation Using Modified Kernel-Based Fuzzy C-Means and Edge Bridge and Fill Technique
- Proximal Support Vector Machine-Based Hybrid Approach for Edge Detection in Noisy Images
- Early Detection of Parkinson’s Disease by Using SPECT Imaging and Biomarkers
- Image Compression Based on Block SVD Power Method
- Noise Reduction Using Modified Wiener Filter in Digital Hearing Aid for Speech Signal Enhancement
- Secure Fingerprint Authentication Using Deep Learning and Minutiae Verification
- The Use of Natural Language Processing Approach for Converting Pseudo Code to C# Code
- Non-word Attributes’ Efficiency in Text Mining Authorship Prediction
- Design and Evaluation of Outlier Detection Based on Semantic Condensed Nearest Neighbor
- An Efficient Quality Inspection of Food Products Using Neural Network Classification
- Opposition Intensity-Based Cuckoo Search Algorithm for Data Privacy Preservation
- M-HMOGA: A New Multi-Objective Feature Selection Algorithm for Handwritten Numeral Classification
- Analogy-Based Approaches to Improve Software Project Effort Estimation Accuracy
- Linear Regression Supporting Vector Machine and Hybrid LOG Filter-Based Image Restoration
- Fractional Fuzzy Clustering and Particle Whale Optimization-Based MapReduce Framework for Big Data Clustering
- Implementation of Improved Ship-Iceberg Classifier Using Deep Learning
- Hybrid Approach for Face Recognition from a Single Sample per Person by Combining VLC and GOM
- Polarity Analysis of Customer Reviews Based on Part-of-Speech Subcategory
- A 4D Trajectory Prediction Model Based on the BP Neural Network
- A Blind Medical Image Watermarking for Secure E-Healthcare Application Using Crypto-Watermarking System
- Discriminating Healthy Wheat Grains from Grains Infected with Fusarium graminearum Using Texture Characteristics of Image-Processing Technique, Discriminant Analysis, and Support Vector Machine Methods
- License Plate Recognition in Urban Road Based on Vehicle Tracking and Result Integration
- Binary Genetic Swarm Optimization: A Combination of GA and PSO for Feature Selection
- Enhanced Twitter Sentiment Analysis Using Hybrid Approach and by Accounting Local Contextual Semantic
- Cloud Security: LKM and Optimal Fuzzy System for Intrusion Detection in Cloud Environment
- Power Average Operators of Trapezoidal Cubic Fuzzy Numbers and Application to Multi-attribute Group Decision Making
Articles in the same Issue
- An Optimized K-Harmonic Means Algorithm Combined with Modified Particle Swarm Optimization and Cuckoo Search Algorithm
- Texture Feature Extraction Using Intuitionistic Fuzzy Local Binary Pattern
- Leaf Disease Segmentation From Agricultural Images via Hybridization of Active Contour Model and OFA
- Deadline Constrained Task Scheduling Method Using a Combination of Center-Based Genetic Algorithm and Group Search Optimization
- Efficient Classification of DDoS Attacks Using an Ensemble Feature Selection Algorithm
- Distributed Multi-agent Bidding-Based Approach for the Collaborative Mapping of Unknown Indoor Environments by a Homogeneous Mobile Robot Team
- An Efficient Technique for Three-Dimensional Image Visualization Through Two-Dimensional Images for Medical Data
- Combined Multi-Agent Method to Control Inter-Department Common Events Collision for University Courses Timetabling
- An Improved Particle Swarm Optimization Algorithm for Global Multidimensional Optimization
- A Kernel Probabilistic Model for Semi-supervised Co-clustering Ensemble
- Pythagorean Hesitant Fuzzy Information Aggregation and Their Application to Multi-Attribute Group Decision-Making Problems
- Using an Efficient Optimal Classifier for Soil Classification in Spatial Data Mining Over Big Data
- A Bayesian Multiresolution Approach for Noise Removal in Medical Magnetic Resonance Images
- Gbest-Guided Artificial Bee Colony Optimization Algorithm-Based Optimal Incorporation of Shunt Capacitors in Distribution Networks under Load Growth
- Graded Soft Expert Set as a Generalization of Hesitant Fuzzy Set
- Universal Liver Extraction Algorithm: An Improved Chan–Vese Model
- Software Effort Estimation Using Modified Fuzzy C Means Clustering and Hybrid ABC-MCS Optimization in Neural Network
- Handwritten Indic Script Recognition Based on the Dempster–Shafer Theory of Evidence
- An Integrated Intuitionistic Fuzzy AHP and TOPSIS Approach to Evaluation of Outsource Manufacturers
- Automatically Assess Day Similarity Using Visual Lifelogs
- A Novel Bio-Inspired Algorithm Based on Social Spiders for Improving Performance and Efficiency of Data Clustering
- Discriminative Training Using Noise Robust Integrated Features and Refined HMM Modeling
- Self-Adaptive Mussels Wandering Optimization Algorithm with Application for Artificial Neural Network Training
- A Framework for Image Alignment of TerraSAR-X Images Using Fractional Derivatives and View Synthesis Approach
- Intelligent Systems for Structural Damage Assessment
- Some Interval-Valued Pythagorean Fuzzy Einstein Weighted Averaging Aggregation Operators and Their Application to Group Decision Making
- Fuzzy Adaptive Genetic Algorithm for Improving the Solution of Industrial Optimization Problems
- Approach to Multiple Attribute Group Decision Making Based on Hesitant Fuzzy Linguistic Aggregation Operators
- Cubic Ordered Weighted Distance Operator and Application in Group Decision-Making
- Fault Signal Recognition in Power Distribution System using Deep Belief Network
- Selector: PSO as Model Selector for Dual-Stage Diabetes Network
- Oppositional Gravitational Search Algorithm and Artificial Neural Network-based Classification of Kidney Images
- Improving Image Search through MKFCM Clustering Strategy-Based Re-ranking Measure
- Sparse Decomposition Technique for Segmentation and Compression of Compound Images
- Automatic Genetic Fuzzy c-Means
- Harmony Search Algorithm for Patient Admission Scheduling Problem
- Speech Signal Compression Algorithm Based on the JPEG Technique
- i-Vector-Based Speaker Verification on Limited Data Using Fusion Techniques
- Prediction of User Future Request Utilizing the Combination of Both ANN and FCM in Web Page Recommendation
- Presentation of ACT/R-RBF Hybrid Architecture to Develop Decision Making in Continuous and Non-continuous Data
- An Overview of Segmentation Algorithms for the Analysis of Anomalies on Medical Images
- Blind Restoration Algorithm Using Residual Measures for Motion-Blurred Noisy Images
- Extreme Learning Machine for Credit Risk Analysis
- A Genetic Algorithm Approach for Group Recommender System Based on Partial Rankings
- Improvements in Spoken Query System to Access the Agricultural Commodity Prices and Weather Information in Kannada Language/Dialects
- A One-Pass Approach for Slope and Slant Estimation of Tri-Script Handwritten Words
- Secure Communication through MultiAgent System-Based Diabetes Diagnosing and Classification
- Development of a Two-Stage Segmentation-Based Word Searching Method for Handwritten Document Images
- Pythagorean Fuzzy Einstein Hybrid Averaging Aggregation Operator and its Application to Multiple-Attribute Group Decision Making
- Ensembles of Text and Time-Series Models for Automatic Generation of Financial Trading Signals from Social Media Content
- A Flame Detection Method Based on Novel Gradient Features
- Modeling and Optimization of a Liquid Flow Process using an Artificial Neural Network-Based Flower Pollination Algorithm
- Spectral Graph-based Features for Recognition of Handwritten Characters: A Case Study on Handwritten Devanagari Numerals
- A Grey Wolf Optimizer for Text Document Clustering
- Classification of Masses in Digital Mammograms Using the Genetic Ensemble Method
- A Hybrid Grey Wolf Optimiser Algorithm for Solving Time Series Classification Problems
- Gray Method for Multiple Attribute Decision Making with Incomplete Weight Information under the Pythagorean Fuzzy Setting
- Multi-Agent System Based on the Extreme Learning Machine and Fuzzy Control for Intelligent Energy Management in Microgrid
- Deep CNN Combined With Relevance Feedback for Trademark Image Retrieval
- Cognitively Motivated Query Abstraction Model Based on Associative Root-Pattern Networks
- Improved Adaptive Neuro-Fuzzy Inference System Using Gray Wolf Optimization: A Case Study in Predicting Biochar Yield
- Predict Forex Trend via Convolutional Neural Networks
- Optimizing Integrated Features for Hindi Automatic Speech Recognition System
- A Novel Weakest t-norm based Fuzzy Fault Tree Analysis Through Qualitative Data Processing and Its Application in System Reliability Evaluation
- FCNB: Fuzzy Correlative Naive Bayes Classifier with MapReduce Framework for Big Data Classification
- A Modified Jaya Algorithm for Mixed-Variable Optimization Problems
- An Improved Robust Fuzzy Algorithm for Unsupervised Learning
- Hybridizing the Cuckoo Search Algorithm with Different Mutation Operators for Numerical Optimization Problems
- An Efficient Lossless ROI Image Compression Using Wavelet-Based Modified Region Growing Algorithm
- Predicting Automatic Trigger Speed for Vehicle-Activated Signs
- Group Recommender Systems – An Evolutionary Approach Based on Multi-expert System for Consensus
- Enriching Documents by Linking Salient Entities and Lexical-Semantic Expansion
- A New Feature Selection Method for Sentiment Analysis in Short Text
- Optimizing Software Modularity with Minimum Possible Variations
- Optimizing the Self-Organizing Team Size Using a Genetic Algorithm in Agile Practices
- Aspect-Oriented Sentiment Analysis: A Topic Modeling-Powered Approach
- Feature Pair Index Graph for Clustering
- Tangramob: An Agent-Based Simulation Framework for Validating Urban Smart Mobility Solutions
- A New Algorithm Based on Magic Square and a Novel Chaotic System for Image Encryption
- Video Steganography Using Knight Tour Algorithm and LSB Method for Encrypted Data
- Clay-Based Brick Porosity Estimation Using Image Processing Techniques
- AGCS Technique to Improve the Performance of Neural Networks
- A Color Image Encryption Technique Based on Bit-Level Permutation and Alternate Logistic Maps
- A Hybrid of Deep CNN and Bidirectional LSTM for Automatic Speech Recognition
- Database Creation and Dialect-Wise Comparative Analysis of Prosodic Features for Punjabi Language
- Trapezoidal Linguistic Cubic Fuzzy TOPSIS Method and Application in a Group Decision Making Program
- Histopathological Image Segmentation Using Modified Kernel-Based Fuzzy C-Means and Edge Bridge and Fill Technique
- Proximal Support Vector Machine-Based Hybrid Approach for Edge Detection in Noisy Images
- Early Detection of Parkinson’s Disease by Using SPECT Imaging and Biomarkers
- Image Compression Based on Block SVD Power Method
- Noise Reduction Using Modified Wiener Filter in Digital Hearing Aid for Speech Signal Enhancement
- Secure Fingerprint Authentication Using Deep Learning and Minutiae Verification
- The Use of Natural Language Processing Approach for Converting Pseudo Code to C# Code
- Non-word Attributes’ Efficiency in Text Mining Authorship Prediction
- Design and Evaluation of Outlier Detection Based on Semantic Condensed Nearest Neighbor
- An Efficient Quality Inspection of Food Products Using Neural Network Classification
- Opposition Intensity-Based Cuckoo Search Algorithm for Data Privacy Preservation
- M-HMOGA: A New Multi-Objective Feature Selection Algorithm for Handwritten Numeral Classification
- Analogy-Based Approaches to Improve Software Project Effort Estimation Accuracy
- Linear Regression Supporting Vector Machine and Hybrid LOG Filter-Based Image Restoration
- Fractional Fuzzy Clustering and Particle Whale Optimization-Based MapReduce Framework for Big Data Clustering
- Implementation of Improved Ship-Iceberg Classifier Using Deep Learning
- Hybrid Approach for Face Recognition from a Single Sample per Person by Combining VLC and GOM
- Polarity Analysis of Customer Reviews Based on Part-of-Speech Subcategory
- A 4D Trajectory Prediction Model Based on the BP Neural Network
- A Blind Medical Image Watermarking for Secure E-Healthcare Application Using Crypto-Watermarking System
- Discriminating Healthy Wheat Grains from Grains Infected with Fusarium graminearum Using Texture Characteristics of Image-Processing Technique, Discriminant Analysis, and Support Vector Machine Methods
- License Plate Recognition in Urban Road Based on Vehicle Tracking and Result Integration
- Binary Genetic Swarm Optimization: A Combination of GA and PSO for Feature Selection
- Enhanced Twitter Sentiment Analysis Using Hybrid Approach and by Accounting Local Contextual Semantic
- Cloud Security: LKM and Optimal Fuzzy System for Intrusion Detection in Cloud Environment
- Power Average Operators of Trapezoidal Cubic Fuzzy Numbers and Application to Multi-attribute Group Decision Making