Unmanned aerial vehicle evasion manoeuvres from enemy aircraft attack
-
Veniamin N. Evdokimenkov
 ,
Dmitriy A. Kozorez
,
Dmitriy A. Kozorez

Abstract
One of the most important problems associated with the combat use of unmanned aerial vehicles remains to ensure their high survivability in conditions of deliberate countermeasures, the source of which can be both ground-based air defence systems and fighter aircraft. For this reason, the study and optimization of evasive manoeuvres of an unmanned aerial vehicle from an enemy aircraft attack remains relevant. Based on the game approach, the authors of this paper propose an algorithm for guaranteeing control of the trajectory of an unmanned aerial vehicle, which ensures its evasion from an enemy air attack. The study of the influence of tactically significant indicators of the manoeuvrability of an unmanned aerial vehicle on the effectiveness of the evasion manoeuvre was carried out. The model predictions are presented, reflecting the degree of influence of unmanned aerial vehicle manoeuvring capabilities on achieving a positional advantage when solving the problem of evading air enemy attack.
1 Introduction
An analysis of the current state and prospects for the development of unmanned aerial vehicles (UAVs) clearly indicates that, in terms of their technical and functional capabilities, they can act as an effective means for reconnaissance and strike tasks [1]. At the same time, one of the most important tasks associated with the combat use of UAVs remains to ensure their high survivability under conditions of enemy deliberate countermeasures. Moreover, the greatest danger is not ground-based air defence (AD), the capabilities of which are limited, but fighter plane, primarily unmanned fighters, capable of detecting and attacking air targets.
Note that work on development of unmanned fighters capable of searching for enemy UAVs with their subsequent destruction is actively carried out all over the world. A well-known example of an unmanned interceptor is the “Peregrine UAV Killer”, which is being created by the Defence Advanced Research Projects Agency (DARPA). The task of this device is to patrol designated area and search for enemy UAVs, with their subsequent destruction. It is assumed that it will be a small, cheap-to-manufacture aircraft with, among other qualities, increased strength. It will be able to destroy any enemy unmanned aircraft. This fighter will be equipped with a global navigation and GPS system [2]. The patent [3] presents an unmanned aerial vehicle designed to intercept and destroy air targets. It is a VTOL aircraft made according to the canard configuration, with fuselage, a trapezoidal wing with two tractive propellers placed on it, a front all-moving horizontal tail and two fins with rotable rudders. There is a useful load in the fuselage, which is a small-arms system located along an axis passing through the mass centre of an aircraft, due to which stable movement is ensured during guidance and firing.
In [4], the project of UAV-interceptor is described, based on the “flying wing” design. A characteristic feature of this scheme is the high (10–12) aerodynamic efficiency achievable in certain flight modes, which allows to obtain a high flight speed with a relatively small thrust-to-weight ratio (ratio of engine thrust to weight of an aircraft). The avionics include a multifunctional radar, a side-looking radar and an optical location station. In addition, each interceptor is equipped with several air-to-air missiles. Thus, today there are all the necessary technical prerequisites for creating an UAV-interceptor. This circumstance indicates the relevance of study and optimisation of UAV evasion manoeuvres, which solves the problem of detecting and suppressing ground targets from an enemy air attack. In this case, the main goal of manoeuvring is to take a position relative to the enemy, which reduces the positional advantage of the latter and limits the possibility of using air weapons (AW) [5].
Air combat manoeuvres are a complex of vertical and lever turns, as well as bank-to-turn manoeuvres and wind-down turns [6, 7, 8, 9]. When studying such manoeuvres, it is necessary to take into account the ability of evading UAVs to perform them under conditions of limited dynamic capabilities, which implies the use of an appropriate mathematical apparatus. For example, in [10, 11], the problems of estimating a suboptimal evasion strategy of an UAV under conditions of uncertainty of the current characteristics of movement and the future strategy of enemy behaviour are investigated. In this case, the trajectory of the attacking aircraft must meet the requirements of optimality of some given functions of phase variables at the final moment of time and the conditions for the passage of its trajectory through a given terminal region of space. In [12], the calculation of the evasion trajectory of an aircraft from air-delivered ordnance in automatic or automated modes is considered.
All the works mentioned above are united by the fact that they do not take into account the objectively game nature of the task of enemy attack avoidance. Indeed, the attacking UAV, as a result of active offensive manoeuvring, tends to move into the area of possible attacks, the configuration of which depends on the characteristics of enemy aircraft weapons (AW). On the contrary, the actions of an attacked UAV performing a passive defensive manoeuvre are aimed at evading an enemy UAV in order to prevent it from entering the area of possible attacks. All this indicates the need to use a game approach to study the avoidance manoeuvres of UAVs. The paper, which continues the work of the authors [13, 14, 15], considers the solution to the problem of guaranteeing control of the UAV trajectory when evading an enemy aircraft attack.
2 Materials and methods
The problem of evasion of strike-reconnaissance drone from an enemy aircraft attack (unmanned interceptor) is considered. The control objective is to ensure a position of the attacked UAV relative to the enemy, in which the effectiveness of the enemy weapons (small arms, cannon or missile weapons) will be reduced.
Let us introduce the designations (Figure 1), which are used in the further mathematical problem formulation: a – strike-reconnaissance UAV, the purpose of which is to evade the interceptor UAV, b – interceptor UAV. The applications are based on the state representation, which include six components - three coordinates (X, Y, Z), which specify their spatial position in the starting coordinate system OXYZ, associated with the departure aerodrome, and three components of the velocity vector (VX, VY, VZ), which are also relative to the speed of the departure airport. The starting coordinate system OXYZ is based on the earth. The authors believe that the manoeuvring of opposing UAVs takes place in conditions of information contact with the enemy. When the drone is moving, it can obtain the position of the enemy aircraft relative to itself. In addition, for any of the conflicting UAVs, information on the current state of the enemy (position, speed) is available. Information about the position and velocity of the UAV refers to the original coordinate system OXYZ.

Illustration of the task formulation for avoidance of enemy attack.
Note that in contrast to solving control problems of a UAV-fighter trajectory proposed in [16, 17], in this case the opponents participating in air combat do not need to obtain information on the current target acceleration, estimation of which with the required accuracy in a live situation remains a serious problem. With this in mind, in relation to the situation under consideration, we introduce the following notation: R(t) = (Xa, Ya, Za, Vxa, Vya, Vza)T, S(t) = (Xb, Yb, Zb, Vxb, Vyb, Vzb)T – respectively, the current state vectors of the evading UAV and the UAV-interceptor in the starting coordinate system OXYZ, “tied” to the departure aerodrome. Then a point in the six-dimensional space of the relative state properties of opposing UAVs is given by a vector Eq. (1):
It is assumed that the process of convergence between the evading UAV and the UAV-interceptor occurs at a finite time interval [0, T]. Fixing a point in the space of relative parameters, which is “ideal” from the standpoint of the UAV-interceptor, when it occupies a tactically advantageous position relative to the target, which provides an advantage in the subsequent attack is given by a vector Eq. (2):
Thus, the UAV-interceptor, performing the target pursuit manoeuvre, seeks to ensure a final condition in which the point Eq. (3) in the space of relative parameters will be located as close as possible to the “ideal” point C*:
The attacked UAV, on the contrary, performs an evasion manoeuvre, in which point C(T) will be located as far as possible from the “ideal” point C*. The specific choice of the C* point depends on the types of UAVs engaged in battle, their dynamic capabilities, the characteristics of the AW and the radar facilities located on them. Determination of such a choice in the work is carried out by the method of an ideal point. As the control vector of the attacked UAV, we will consider a three-dimensional vector, the components of which are manoeuvring accelerations along the corresponding axes of the starting coordinate system Eq. (4):
In the future, the acceleration components of the attacked UAV in the starting coordinate system based on the direction cosine matrix can be recalculated into the acceleration components in the associated coordinate system, and therefore into the components of the load factor along the connected axes, which provide manoeuvrability. The UAV-interceptor control vector has a similar structure Eq. (5):
As a result of the C(t) vector components time differentiation, a differential equation is obtained describing dynamics in the relative state of the conflicting aircraft during manoeuvring Eq. (6):
where C(t) – previously introduced 6×1 vector characterising the current relative state of the opposing aircraft; A, B, D – constant matrices of appropriate sizes with components Eq. (7):
For linear dynamic system Eqs. (6–7), there is a game problem with two participants pursuing different interests:
the first player (target), due to the choice of control U(t), seeks to transfer system (6) in a given time T from the initial state C(0) to the final state C(T) with a maximum deviation from the “ideal” state C* with control restrictions;
the second player (interceptor), due to the choice of control V(t), seeks to transfer system (6) in a given time T from the initial state C(0) to the final state C(T) with a minimum deviation from the “ideal” state C* with control constraints.
Note that in real air combat, the parameters of opponents’ relative movement have natural limitations, set by the system of inequalities Eq. (8):
where the values of Cimin, Cimax are determined by the dynamic capabilities of the opposing UAVs and the visibility conditions of airborne radar stations, which provide information on the position and speed of the enemy.
Similar restrictions are imposed on controls Eq. (9):
The presence of objective restrictions makes it possible to make the transition from the physical parameters of the relative motion of the targeted UAV and UAV-interceptor to their normalised counterparts based on a linear operator of the following form [14]:
Taking into account the normalising transformation Eq. (10), model Eq. (6) retains a linear structure and can be described by the differential Eq. (11), all components of which are described in [14]. In this case, the game problem formulated above in relation to model (6) fully retains its content.
Taking into account the interests of the players, the following criterion is proposed to be used as a criterion in the considered game control problem for a linear dynamic system Eq. (11):
where Q, W – positive definite matrices, assumed by the given.
The elements of these matrices are specified at the modelling stage of the algorithm operation so that the constraints on the controls are provided; G is a weight matrix that determines how stringently the requirements for individual relative motion parameters of an interceptor must be met to bring it to the “ideal” point C*. The specific form of this matrix depends mainly on the type of aviation weapons equipped on the UAV-interceptor.
Synthesis of guaranteed control of the UAV trajectory at the stage of enemy evasion. Taking into account criterion Eq. (12), from the standpoint of the attacked UAV, the optimal control is Ũ1, which, in the worst-case scenario of actions of the enemy aircraft
From the perspective of the attacking UAV, the optimal solution Ũ2,
Therefore, within the framework of criterion (12), the interests of the players are strictly opposite: the first player (target) seeks to maximise the criterion, and the second (interceptor) – to minimise it. At the same time, everyone assumes that the enemy will act in the most beneficial way for him.
In the theory of differential games, it was proved [18] that for a linear system (11) with a quadratic criterion (12), a saddle point always exists, that is, there is a solution that is optimal from the perspective of both conflicting parties Eq. (15):
In [18], a solution to this problem is given on the basis of Bellman's dynamic programming method, provided that the duration of the approaching process of conflicting aircraft T is given. This solution is described by the relations:
Relations (16) allow, for any moment of time t, to find the control Ũ* of the attacked UAV trajectory, depending on its current state relative to the UAV-interceptor specified by the vector
Note that differential equations (17) include constant matrices Ã,
inequalities were satisfied Eq. (19):
The optimal solution (16–17) described in this section is used in what follows as a “reference” solution, which makes it possible to develop an avoidance algorithm on its basis, provided that the duration of the convergence process T is not specified. In [14], a method is proposed for determining the optimal duration of the convergence process, which meets the condition for the existence of a saddle point in the game problem under consideration. The estimated duration of the convergence process T* determined in accordance with [14] is used to calculate the controls
3 Results and discussion
To evaluate the performance of the algorithm described above, simulation modelling was carried out, the purpose of which was to estimate the positional advantage that the target UAV acquires, taking into account its manoeuvrability. The general steps of simulation modelling:
Selection of the vector C(0), which sets the relative initial state of the attacked UAV and the UAV-interceptor.
Calculation of the distances d(T*), which characterises the proximity to the “ideal” point
Estimation of the manoeuvrability of the attacked UAV.
Carrying out of the three series of computational experiments.
Modelling randomly enemy trajectories.
As a prototype of a UAV-interceptor, an advanced aircraft was considered, the characteristics of which correspond to [4]. This article considers not only ideal conditions; natural limitations in real air combat were also taken into account. In the modelling process, the vector C(0), which sets the relative initial state of the attacked UAV and the UAV-interceptor at the time of the beginning of the rendezvous, was chosen randomly within a given area Eq. (20):
As the values Cimax (0),
To evaluate the positional advantage that the attacked UAV acquires at the moment of evasive manoeuvre completion T*, the distances d(T*) were calculated, which characterises the proximity to the “ideal” point
It was assumed that the UAV-interceptor, in accordance with [4], is equipped with melee guided missiles (GM) with a heat-seeking head. In this case, the “ideal” point is C*, corresponding to the best conditions for using the GM:
The manoeuvrability of the attacked UAV was assessed according to the following tactically significant indicators [19]:
“Throttle response”, which characterises the efficiency of UAV's acceleration to the required speed. The influence of this indicator on the UAV's manoeuvring trajectory is manifested through the value of the axial acceleration ax in the starting coordinate system.
“Rate of climb”, which determines the UAV's manoeuvrability in the vertical plane. The influence of this indicator on the UAV's manoeuvring trajectory is manifested through the value of the normal acceleration ay in the starting coordinate system.
“Agility”, reflecting the UAV's ability to perform horizontal manoeuvres. The influence of this indicator on the manoeuvring trajectory is manifested through the value of the lateral acceleration az in the starting coordinate system.
In order to study the influence of the above indicators on the achievement of positional advantage in air combat, three series of computational experiments were carried out, each of which included modelling 100 enemy trajectories corresponding to different randomly selected initial states C(0) ∈ WC. In all cases, the restrictions on the control of the UAV-interceptor, by analogy with [13], were set in the form Eq. (23):
where v1max = 4g; v2max = 6g; v3max = 2g.
In the process of manoeuvring, the attacked UAV and the UAV-interceptor used the optimal control laws
The value k<1 indicates that the UAV-interceptor has a manoeuvrable advantage in terms of “throttle response”. The value k=1 indicates that the conflicting UAVs have comparable manoeuvrability for this indicator. Finally, k>1 indicates the manoeuvrable advantage of the attacked UAV. At the same time, it was assumed that the attacked UAV and the UAV-interceptor have comparable manoeuvrability in terms of “climb rate” and “agility”, that is u2max = v2max; u3max = v3max. For each fixed value u1max/v1max, in accordance with a uniform distribution, models Cj (0) ∈WC, j = 1, .., 100 were generated randomly, which set the relative initial position of the attacked UAV and UAV-interceptor, and the trajectories
Figure 2a shows the distribution of values dj(u1max/v1max), j = 1, ..., 100, reflecting the influence of the “throttle response” of the attacked UAV in comparison with the UAV-interceptor on the positional advantage achieved by the latter in air combat. The shaded area defines the border of the zone of possible launches, corresponding to the characteristics of the guided missiles with a heat-seeking head, which the UAV-interceptor is equipped with. Figure 2b contains a dependence that expresses the percentage of trajectories at which the positional advantage of the attacked UAV is ensured, that is, it is brought outside the zone of possible launches of GM by the UAV-interceptor. In a similar way, the influence of other indicators of UAV manoeuvrability on its positional advantage.
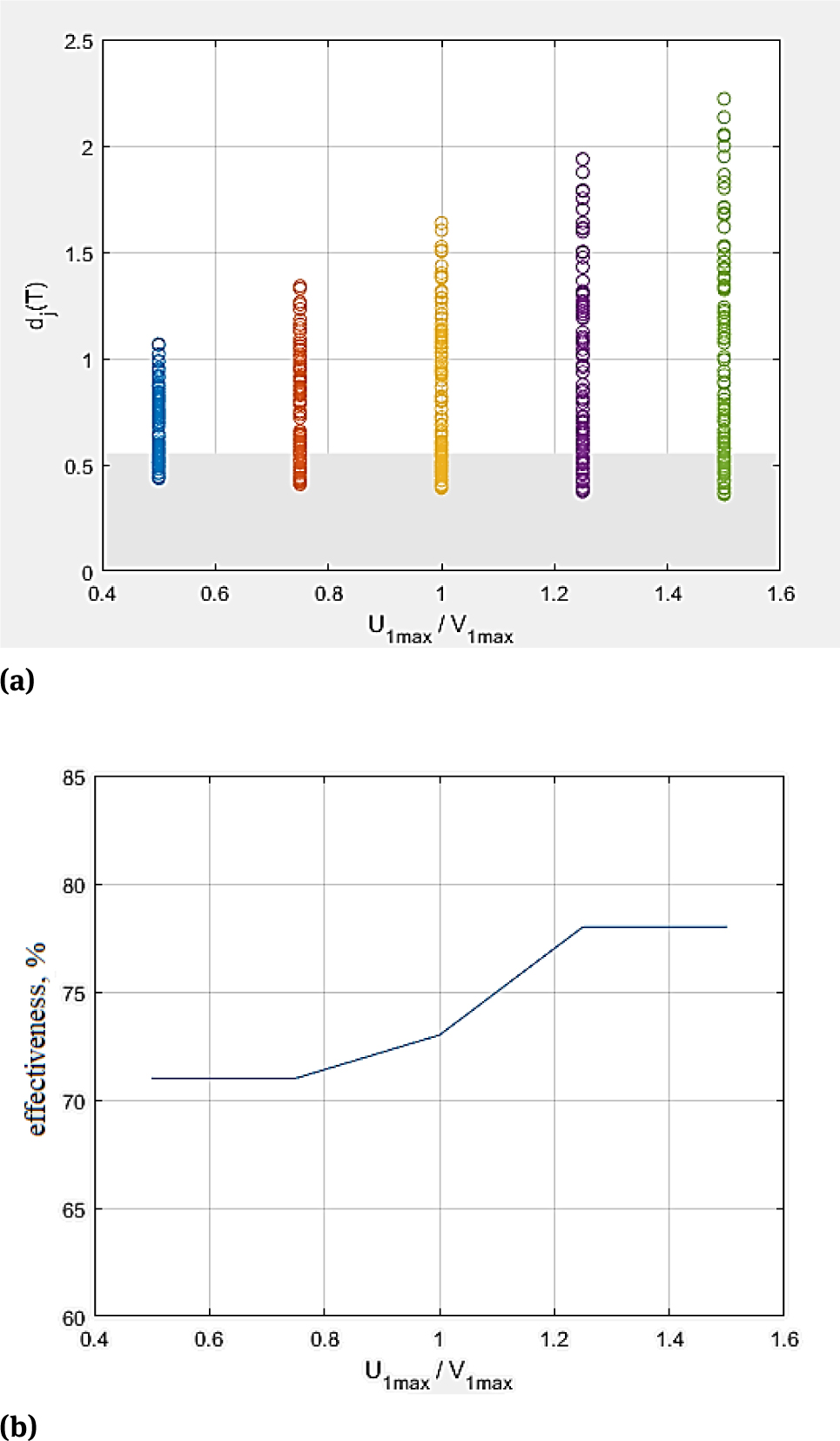
Influence of “throttle response” in UAV compared with the enemy aircraft on the positional advantage achieved by it.
Figure 3a, 3b show the distribution of the values dj(u2max/v2max), j = 1, ..., 100, and the percentage of trajectories that ensured position of the attacked UAV beyond the zone of UAV-interceptor missiles, illustrating the influence of the “rate of climb” of the attacked UAV in relation to the enemy for the positional advantage achieved during dogfight. Figure 4a, 4b illustrate the influence of the “agility” of the evading UAV in relation to the pursuing enemy aircraft on the positional advantage it achieves during dogfight.

Influence of the “rate of climb” of the attacked UAV in comparison with the UAV-interceptor on the positional advantage achieved by it.
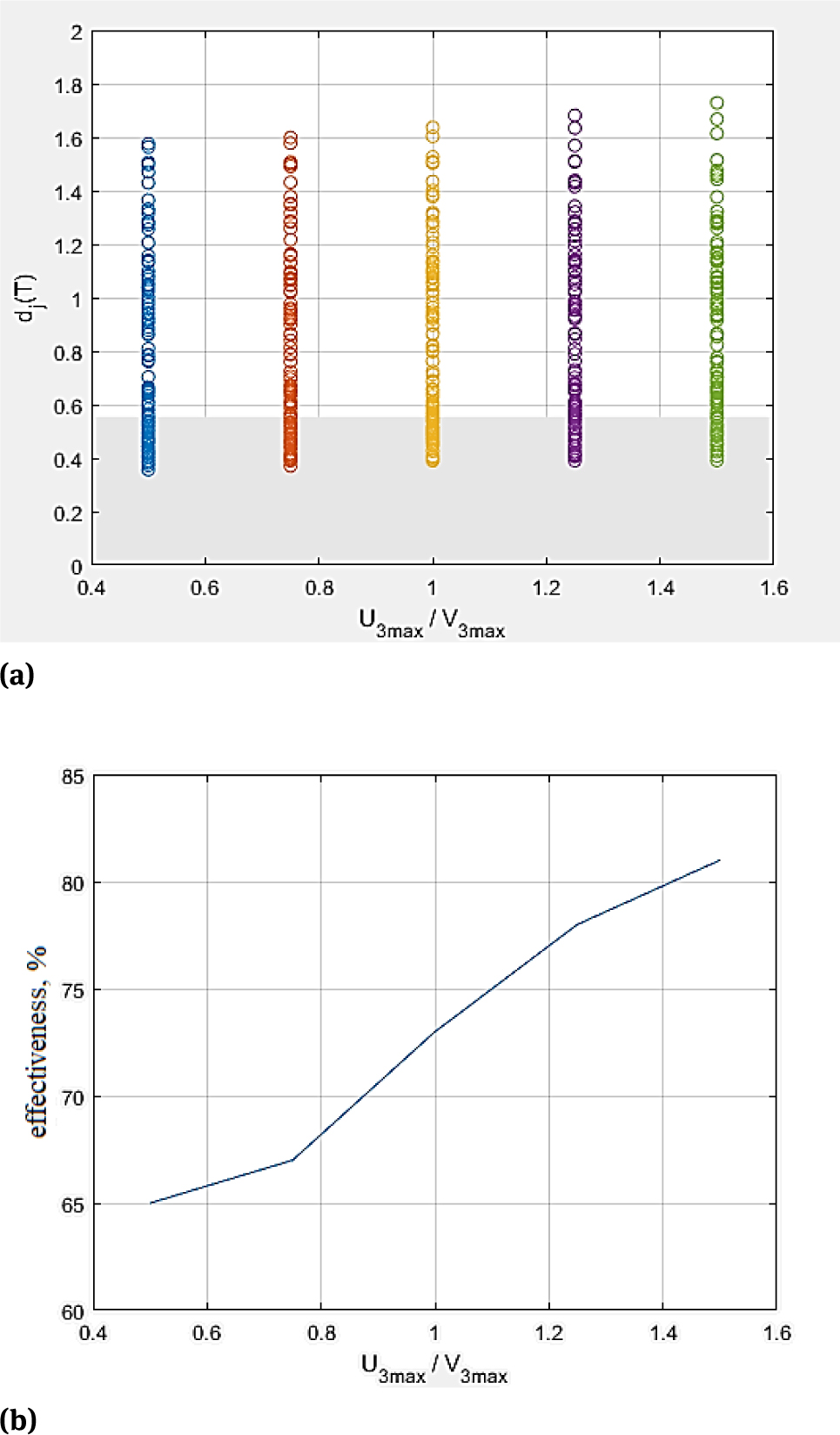
Influence of the attacked UAV's “agility” on the positional advantage in comparison with the UAV-interceptor.
Analysis of the dependencies shown in Figures 2–4 allows us to assert that the use of the described guaranteeing control algorithm, regardless of the relative initial state of the attacked UAV and the UAV-interceptor, with the comparability of their manoeuvrability in 73% of cases, provides a positional advantage of the attacked UAV, in which its position relative to the UAV-interceptor makes the use of weapons placed on it ineffective. Note that an increase in the values of tactical indicators reflecting the manoeuvrability of the attacked UAV compared to the enemy leads to the fact that in all cases, regardless of the initial position of the attacked UAV relative to the UAV-interceptor, it is brought outside the zone of possible launch of guided missiles.
At the same time, such a tactical indicator as “agility”, that is, the ability of the attacked UAV to perform horizontal manoeuvres, has the greatest impact on the positional advantage. The “rate of climb” indicator has the least degree of influence on the efficiency of the algorithm, which is fully consistent with the results of the studies presented in [19]. According to G.V. Khudov and I.A. Taran, group (integrated) use of UAVs, providing a significant advantage over single use, at the same time greatly complicates the procedure of collective management and information support of this process [20]. Therefore, along with the strengthening of the role of UAVs for various purposes, it is necessary to pay serious attention to the development of algorithms for managing large groups of UAVs with the optimization of collective interests. The general problem of group application of UAV attack and defense – high requirements for the performance of computers, algorithms for calculating trajectory control and their information support [21]. Note that during the simulation it was assumed that the UAV-interceptor acts in the worst way, from the perspective of the attacked UAV. Any deviation of the UAV-interceptor from the optimal command profile increases the positional advantage of the attacked UAV.
4 Conclusions
The paper describes an original algorithm for guaranteed control of the UAV's evasive manoeuvres from an aircraft attack. Based on the developed algorithm, the influence of tactically significant indicators of the manoeuvring capabilities of an attacked UAV on the positional advantage acquired by it with the possibility of evading attack of an UAV-interceptor was investigated.
A series of computational experiments has been carried out, the findings make it possible to assert that the use of the developed algorithm of guaranteed control regardless of the relative initial state of the attacked UAV and the UAV-interceptor, with the comparability of their manoeuvrability in 73% of cases, provides a positional advantage of the attacked UAV, in which makes the use of guided missiles ineffective.
Funding information:
The authors state no funding involved.
Author contributions:
All authors have accepted responsibility for the entire content of this manuscript and approved its submission.
Conflict of interest:
The authors state no conflict of interest.
References
[1] Evdokimenkov VN, Krasil'shchikov MN, Orkin SD. Control of mixed unmanned and piloted flying vehicles groups in conditions of common displays and controls. Moscow: MAI Publishing House; 2015.Search in Google Scholar
[2] Schenck W. Time of unmanned kamikaze. Military industrial courier; 2007. https://vpk-news.ru/articles/4663.Search in Google Scholar
[3] Brusov VS, Volkova AS, Druzin SV, Roslyakov IA, Sozinov PA, Trifonov IV. Patent 113562 Russian Federation, MKPO 12-07. Unmanned aerial vehicle-interceptor. Applicant and patentee: Joint Stock Company “Concern of Aerospace Defense” Almaz-Antey” (RU); 2018.Search in Google Scholar
[4] Project “Research for the creation of an aviation complex for long-range interception of cruise missiles”; 2019. https://dfnc.ru/yandeks-novosti/proekt-issledovaniya-v-obespechenie-sozdaniya-aviatsionnogo-kompleksa-dalnego-perehvata-krylatyh-raket-v-interesah-povysheniya-v-interesahpovysheniya-viffektivovaniya-povysheniya-viffektivovaniyapovysheniya-viffektivovnosti-pro-krylatymi/.Search in Google Scholar
[5] Tishchenko YuE, Fedunov BE. Optimal moments of missile launch and jamming in a duel situation of fighter aircraft. Proceed of RAN. Contr Theor and Sys. 2006;5:98–109.Search in Google Scholar
[6] Shaw RL. (1985). Fighter combat: Tactics and maneuvering. Naval Institute Press, Annapolis.Search in Google Scholar
[7] Petrov VP. Maneuvering in aerial combat. For Mil Rev. 1985;1:53–57.Search in Google Scholar
[8] Bulinsky VA. The dynamics of maneuvering of a fighter aircraft in air combat. Moscow: Military Publishing; 1957.Search in Google Scholar
[9] Babich BK. Air combat (origin and development). Moscow: Voenizdat; 1991.Search in Google Scholar
[10] Polovinchuk NYa, Ivanov SV, Kotelnitskaya LI. Synthesis of control of the evasion maneuver of an unmanned aerial vehicle, taking into account terminal restrictions. Bull of the Don State Tech Univer. 2018;18(2):190–200.10.23947/1992-5980-2018-18-2-190-200Search in Google Scholar
[11] Shcherban IV, Ivanov SV. A synthesis technique for controlling the evasive maneuver of an ally player in a slow loop of a terminal control system. Dual Tech. 2010;1:59–64.Search in Google Scholar
[12] Gorchakov MA, Lushchik AV, Rubinov VI. Algorithmic support for constructing the evasion trajectory of the aircraft from controlled weapons. Bull of Voronezh State Tech Univer. 2018;14(1):15–20.Search in Google Scholar
[13] Evdokimenkov VN, Lyapin NA. Minimax optimization of enemy pursuit maneuvers in close air combat. Elect J “Proceed of MAI”. 2019;106. https://docplayer.ru/162636790-Minimaksnaya-optimizaciya-manevrov-presledovaniya-protivnika-v-usloviyah-blizhnego-vozdushnogo-boya.html.Search in Google Scholar
[14] Evdokimenkov VN, Krasil'shchikov MN, Lyapin NA. Guaranteeing UAV trajectory control when approaching a maneuvering air target. Proceedings of RAN. Contr Theor and Syst. 2018;5:42–57.10.1134/S1064230718050040Search in Google Scholar
[15] Evdokimenkov VN, Krasil'shchikov MN, Sebryakov GG. Unmanned flying vehicle trajectory guaranteeing control at approach to the maneuvering air target. Proced Comp Scien. 2019;150:294–301.10.1016/j.procs.2019.02.055Search in Google Scholar
[16] Verba VS, Tatarsky BG. Unmanned flying vehicles complexes. Robotic technology systems based on unmanned flying vehicles. Moscow: Radiotekhnika; 2016.Search in Google Scholar
[17] Moiseev VS. Unmanned flying vehicles control applied theory. Kazan: GBU “Respublikanskii Tsentr Monitoringa Kachestva Obrazovaniya”; 2013.Search in Google Scholar
[18] Bukhalev VA. Automatics and control theory fundamentals. Moscow: Publ. VVIA im. prof. N.E. Zhukovskogo; 2006.Search in Google Scholar
[19] Comparison of the maneuverability of the Su-27 with some fighters; 2019.Search in Google Scholar
[20] Khudov GV, Taran IA. Method of synthesis of rational structure of air defence grouping intelligence system with using genetic algorithm. Scien and Tech of the Air Forc of Ukr. 2016;2(23):25–31.Search in Google Scholar
[21] Gomathi K, Balaji A, Mrunalini T. Design and optimization of differential capacitive micro accelerometer for vibration measurement. Jof the Mech Behav of Mater. 2021;30:19–27.10.1515/jmbm-2021-0003Search in Google Scholar
© 2021 Veniamin N. Evdokimenkov et al., published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Research Articles
- The elastic-plastic properties of an anti-icing coating on an aluminum alloy: Experimental and numerical approach
- Optimization of recycled slag-fresh flux mixture based upon weld bead quality for submerged arc welding of stainless steel
- Design and optimization of differential capacitive micro accelerometer for vibration measurement
- Mechanical performance of abrasive sandpaper made with palm kernel shells and coconut shells
- Experimental investigation of WEDM process through integrated desirability and machine learning technique on implant material
- Mechanical properties and microstructural characteristics of rotating arc-gas metal arc welded carbon steel joints
- Assessment of cement replacement with fine recycled rubber particles in sustainable cementitious composites
- Structural response and sensitivity analysis of granular and asphaltic overlayment track considering linear viscoelastic behavior of asphalt
- Unmanned aerial vehicle evasion manoeuvres from enemy aircraft attack
- Effect of corrosion on surface degradation of galvanized steel in poultry dung, pig dung and urea solutions using rice straw as an inhibitor
- Mathematical modeling of AZ30 magnesium alloys at high temperature using the ring compression test and genetic algorithm method
- Study on hot deformation behavior and workability of stir-cast Al6063-6wt.% steelp based composites
- The effects of processing parameters on the formation of oxide layers in aluminium alloys using plasma electrolytic oxidation technique
- Behavior of green reactive powder mortar reinforced with steel fibers
- On the hygrothermal properties of sandcrete blocks produced with sawdust as partial replacement of sand
- Mechanical behavior of thin-walled steel under hard contact with rigid seabed rock: Theoretical contact approach and nonlinear FE calculation
- Mechanical properties and microstructural characteristics of rotary friction welded dissimilar joints of rolled homogeneous armor steel and medium carbon steel
- Studies of carboxylated nitrile butadiene rubber/butyl reclaimed rubber (XNBR/BRR) blends for shoe soles application
- Mechanical properties of wire arc additive manufactured carbon steel cylindrical component made by gas metal arc welding process
- Synthesis and mechanical characterization of Si3N4 reinforced copper-tin matrix composites
- Analysis of plated-hull structure strength against hydrostatic and hydrodynamic loads: A case study of 600 TEU container ships
- Mechanical performance investigation of lignocellulosic coconut and pomegranate / LDPE biocomposite green materials
- Special Issue MICAP-2021
- Double hydrothermal synthesis of iron oxide/silver oxide nanocomposites with antibacterial activity**
- Enhanced photocatalytic activity of TiO2-CdS composite nanofibers under sunlight irradiation**
- Structural properties of CoxCu1−xFe2O4 solid solution**
- Green-synthesis of Ag2O nanoparticles for antimicrobial assays**
- Effect of current density on the porous silicon preparation as gas sensors**
- A mechanochemical preparation, properties and kinetic study of kaolin–N, P fertilizers for agricultural applications**
- Impact strength of surface treated SS316L wires reinforced PMMA**
- Computational studies on electronic and optical properties of dopamine derivatives structure: A DFT study**
- Multilayer coating effects on the thermal conductivity of tools using an electric furnace technique**
- The positron and mechanical parameters of a cold-worked aluminum alloy (3004) Using PALT, PADBT and HV**
- Effect of thermal annealing on the structural and optical properties of TiO2 nanostructures**
- Improvement of forging die life by failure mechanism analysis**
Articles in the same Issue
- Research Articles
- The elastic-plastic properties of an anti-icing coating on an aluminum alloy: Experimental and numerical approach
- Optimization of recycled slag-fresh flux mixture based upon weld bead quality for submerged arc welding of stainless steel
- Design and optimization of differential capacitive micro accelerometer for vibration measurement
- Mechanical performance of abrasive sandpaper made with palm kernel shells and coconut shells
- Experimental investigation of WEDM process through integrated desirability and machine learning technique on implant material
- Mechanical properties and microstructural characteristics of rotating arc-gas metal arc welded carbon steel joints
- Assessment of cement replacement with fine recycled rubber particles in sustainable cementitious composites
- Structural response and sensitivity analysis of granular and asphaltic overlayment track considering linear viscoelastic behavior of asphalt
- Unmanned aerial vehicle evasion manoeuvres from enemy aircraft attack
- Effect of corrosion on surface degradation of galvanized steel in poultry dung, pig dung and urea solutions using rice straw as an inhibitor
- Mathematical modeling of AZ30 magnesium alloys at high temperature using the ring compression test and genetic algorithm method
- Study on hot deformation behavior and workability of stir-cast Al6063-6wt.% steelp based composites
- The effects of processing parameters on the formation of oxide layers in aluminium alloys using plasma electrolytic oxidation technique
- Behavior of green reactive powder mortar reinforced with steel fibers
- On the hygrothermal properties of sandcrete blocks produced with sawdust as partial replacement of sand
- Mechanical behavior of thin-walled steel under hard contact with rigid seabed rock: Theoretical contact approach and nonlinear FE calculation
- Mechanical properties and microstructural characteristics of rotary friction welded dissimilar joints of rolled homogeneous armor steel and medium carbon steel
- Studies of carboxylated nitrile butadiene rubber/butyl reclaimed rubber (XNBR/BRR) blends for shoe soles application
- Mechanical properties of wire arc additive manufactured carbon steel cylindrical component made by gas metal arc welding process
- Synthesis and mechanical characterization of Si3N4 reinforced copper-tin matrix composites
- Analysis of plated-hull structure strength against hydrostatic and hydrodynamic loads: A case study of 600 TEU container ships
- Mechanical performance investigation of lignocellulosic coconut and pomegranate / LDPE biocomposite green materials
- Special Issue MICAP-2021
- Double hydrothermal synthesis of iron oxide/silver oxide nanocomposites with antibacterial activity**
- Enhanced photocatalytic activity of TiO2-CdS composite nanofibers under sunlight irradiation**
- Structural properties of CoxCu1−xFe2O4 solid solution**
- Green-synthesis of Ag2O nanoparticles for antimicrobial assays**
- Effect of current density on the porous silicon preparation as gas sensors**
- A mechanochemical preparation, properties and kinetic study of kaolin–N, P fertilizers for agricultural applications**
- Impact strength of surface treated SS316L wires reinforced PMMA**
- Computational studies on electronic and optical properties of dopamine derivatives structure: A DFT study**
- Multilayer coating effects on the thermal conductivity of tools using an electric furnace technique**
- The positron and mechanical parameters of a cold-worked aluminum alloy (3004) Using PALT, PADBT and HV**
- Effect of thermal annealing on the structural and optical properties of TiO2 nanostructures**
- Improvement of forging die life by failure mechanism analysis**