Neural network quaternion-based controller for port-Hamiltonian system
-
Fawaz E. Alsaadi
 and
Larissa M. Batrancea
and
Larissa M. Batrancea

Abstract
In this research article, a control approach for port-Hamiltonian PH systems based in a neural network (NN) quaternion-based control strategy is presented. First, the dynamics is converted by the implementation of a Poisson bracket in order to facilitate the mathematical model in order to obtain a feasible formulation for the controller design based on quaternion NNs. In this study, two controllers for this kind of of system are presented: the first one consists in the controller design for a PH system about its equilibrium points taking into consideration the position and momentum. This mean is achieved by dividing the quaternion neural controller into scalar and vectorial parts to facilitate the controller derivation by selecting a Lyapunov functional. The second control strategy consists in designing the trajectory tracking controller, in which a reference moment is considered in order to drive this variable to the final desired position according to a reference variable; again, a Lyapunov functional is implemented to obtain the desired control law. It is important to mention that both controllers take into advantage that the energy consideration and that the representation of many physical systems could be implemented in quaternions. Besides the angular velocity, trajectory tracking of a three-phase induction motor is presented as a third numerical experiment. Two numerical experiments are presented to validate the theoretical results evinced in this study. Finally, a discussion and conclusion section is provided.
1 Introduction
Due to its energy consideration, port-Hamiltonian systems has become an important mathematical representation for many types of physical systems such as fluid and particle dynamic systems, in which the port-Hamiltonian mathematical representation consists of two phase variables related to the position and the momentum of a particle ensemble. It is important to consider that port-Hamiltonian systems for the representation of mechanical systems have been increased nowadays due to the vast amount of novel robotic mechanisms. For this reason, it is important to obtain a feasible mathematical model for controller design purpose [1,2]. Among the kinds of controllers that can be designed for a port-Hamiltonian system are energy-based and passivity-based control.
Neural network (NN) control has been implemented nowadays considering the flexibility and easiness to tune for the stabilization of many kinds of nonlinear dynamic systems. For these reasons, in this section, an establishment of the theoretical fundamentals for this study is presented.
NNs have become important nowadays for different kinds of applications that are not necessarily related to controller design. Among these applications, optimization, pattern recognition, classification, and prediction are found; so, for example, in articles like [3], the topological properties of NN from the graph-theory viewpoint are evinced. Then, in [4], a comparative analysis between feedforward neural-networks and radial-basis NN is performed. Meanwhile, in [5], the stability analysis and control synchronization of NNs are presented. In [6], the Riemannian geometry of deep NNs is shown. Then, in [7,8], an image classification application of convolutional NNs and prediction application is presented, respectively.
Quaternion NNs are crucial for this research study taking into consideration that these type of networks are implemented. The quaternion NNs are divided into a scalar quaternion part and a quaternion vector part. There are several research studies in which these quaternion-based NNs are mentioned: so, for example, in [9], quaternion memristive NNs are analyzed by means of the Lagrangian stability considering that this possessses mixed time delays. Then, in [10], the Mittag-Leffler stability analysis is presented. In [11], a quaternion NN with leakage and proportional delays is analyzed. Then, in [12], a novel synchronization strategy of quaternion-based NNs with time delays is presented. Then, in [13,14], an stochastic version of quaternion NN and the stabilization of quaternion delayed NNs are shown.
NNs have been extensively implemented nowadays in the control and stabilization of nonlinear and many kinds of complex dynamical systems. For example, in articles like [15], the neural control of discrete weak formulation is presented. Then, in [16], the neural control of a space vehicle with output constraints is presented. Meanwhile, in [17], a space manipulator is controlled by means of NN control designed by selecting barrier tan-type Lyapunov functions. Then, in [18], a review of different types of neural controllers for nuclear power plants is presented. Then, in [19,20], two interesting applications of NN control for an underwater vehicle and switched nonlinear interconnected systems are shown.
Dynamic control is important taking into consideration that the type of quaternion-based neural controller is dynamic. So the following references are mentioned taking into consideration that this kind of control strategy is worthy to mention. In references like [21], a dynamic controller for aerobic granular sludge reactor is presented. Meanwhile, in [22], the energy decay of the wave equation by a delay in the dynamic control is evinced. Then, in [23], the control of refrigeration cycle with single, dual, and triple effects is presented. Finally, in [24,25], the design of an adaptive backstepping and NN dynamic control with dynamic surface is presented, respectively.
As mentioned earlier, port-Hamiltonian systems are important to be studied and analyzed considering the energy properties of these kinds of systems. It is crucial to take into consideration that novel control strategies as proposed in this article are necessary considering the complexity of this kind of complex dynamic system. In the literature, there are some research studies regarding this topic such as [26], in which the control with output consensus for PH system is presented. Meanwhile, in [27], the discretization of PH systems by the finite elements is shown. Meanwhile, in [28], the exponential decay rate of port-Hamiltonian system is evinced. It is worthy to cite references like [29], and the port-Hamiltonian derivation for chemical processes is shown. Finally, in [30,31], the mixed geometric coupling of PH system is achieved and the model predictive control of PH systems is presented, respectively.
In this study, the design and synthesis of a quaternion-based NN controller for a PH system is evinced. First, in order to improve the tractability of the port-Hamiltonian mathematical formulation, the PH system is represented by means of the Poisson bracket. The use of this operator makes it easy in order to synthesize the controller for this kind of mathematical model. The NN quaternion-based controller is designed by dividing the quaternion NN into the scalar quaternion and the vector quaternion; so by selecting appropriate control law, the implementation of suitable Lyapunov functionals is done in order to obtain a feasible control law. In this study, two kinds of NN quaternion-based controllers are shown, for either stabilization and trajectory tracking purposes, so in this way, the controller is suitable to be implemented, in order to follow the trajectory of a reference variable or simply stabilizes the port-Hamiltonian system in its equilibrium point. This experiment consists by selecting the movement of a particle in order to stabilize its trajectory. Discussions and conclusions of the theoretical and experimental results are shown, respectively.
The contributions are shown as follows:
Considering the complex dynamics of port-Hamiltonian systems, NN controllers are suitable to stabilize and for trajectory tracking control.
Quaternion NNs are suitable considering that the dynamics of robots and unmanned aerial vehicles, for example, are established in quaternions.
Quaternion NNs provide more degrees of freedom for control purposes in comparison with other types of NNs.
The NN controller provided in this research study provides a fast and accurate closed-loop system response.
This NN controller approach provides an easy-to-tune NNs parameters.
2 Related work
In this section, the comparison of the quaternion NNs with other type of NNs is presented considering the advantages and disadvantages. Besides, passivity-based and energy-based control for PH systems is presented taking into account that these control strategies are commonly found.
Quaternion NNs are fundamental in this article, so it is important to mention the following studies. For example, in [32], in which the power law synchronization of quaternion-valued NN is shown. Then, in [11], quaternion-based NNs stabilization with time delays is presented. It is important to consider time delays in quaternion NNs because it is a common phenomenon found in many real physical systems that can produce instability or poor closed-loop performance. Meanwhile, in [33], the stochastic synchronization of Markovian jump quaternion NN synchronization is presented. In [34], the dissipative and synchronization of quaternion-based NNs is shown. Then, in [35], the stability analysis and control of Markovian jump quaternion-based NNs is evinced.
Other types of neural controllers that are useful for this research study are in [36], in which the synchronization of fractional order fuzzy NN is achieved by the implementation of a nonlinear feedback control law. Meanwhile, in [37], a direct current motor is controlled by a fuzzy neural PID control, which is is presented in this article. In [38], the state estimation and NN control of a Markovian jump system is presented. Then, in [39], a fractional order NN is presented to control a rehabilitation robot. In [40], a sliding mode controller and a recurrent NN based on a robotic operated vehicle are presented. In [41], a neural controller is designed for the stabilization of a water reactor.
Diverse kinds of controllers have been developed during the past decades, considering that plenty of physical systems in which this controller can be implemented has been discovered. For example, in articles like [42], the observer design for a 1-D parameter-distributed port-Hamiltonian system is evinced. Then, in articles like [43], a fully actuated mechanical system in the PH formulation is controlled by virtual contractivity. In [44], an analysis of reduced model boundary control strategies for linear PH systems is presented. Meanwhile, in [45], a boundary-controlled port-Hamiltonian system is presented. Then, in [46,47], the thermodynamic PH system optimal control and the structure-preserving discretization of PH system are shown.
Energy control of PH systems is considered as one of the important control strategies for PH systems taking into consideration the energy properties of port-Hamiltonian systems; among these important papers found in the literature are papers like [48], in which the design of an energy controller and observer for infinite dimensional PH system is presented. Meanwhile, in [49], an energy controller design in domain control of infinite dimensional PH system is evinced. Then, in [50], the controller design of the PH system with minimal energy supply is evinced. In [51], the structural invariance and control of PH systems are presented. Then, in [52,53], the boundary control based in energy shaping of PH systems and energy-based feedback control of port-Hamiltonian systems is presented, respectively.
To finalize this literature review, consider the following references regarding the control of PH systems based on passivity, in which this dissipative-based control strategy is important to this study, taking into consideration that this strategy is widely used [54–59].
In this paragraph are remarked the differences, advantages, and disadvantages of quaternion NNs in comparison with other types of NNs. In this case, is important to mention the comparison of quaternion NNs with complex variable NNs and fuzzy NNs. In references like [60–62], complex-valued NNs are presented. It is proved that quaternion NNs provide more degrees of freedom for control purposes in comparison with complex variable NNs. So for this reason, the measurement of the performances is significantly superior with the quaternion NN in comparison with complex variable NNs. Besides, taking advantage that the kinematics and dynamics of many robotics and unmanned aerial vehicle systems are represented with the quaternion mathematical definition, it is advantageous to implement the quaternion NNs as presented in this research study.
On the other side in articles like [63–65], fuzzy NNs are presented, the advantages that these kinds of NNs possesss are that they are useful for dynamic system with uncertainties, something that the quaternion NNs do not possess these characteristics. It must be recalled that the computational effort of quaternion NNs is significantly low in comparison with other NN strategies, something that is an advantage in real-time applications of neural controllers.
3 Theoretical background
In this section, basically the fundamentals of the Poisson bracket and the port-Hamiltonian formulation are explained.
3.1 Poisson bracket
The Poisson bracket is given by [66,67]
where
Property 1
The Poisson bracket properties, in which it is defined by
Anti-symmetry
Leibniz rule
The Poisson bracket is obtained by:
where
3.2 Port-Hamiltonian dynamic system formulation
So in order to establish the port-Hamiltonian formulation, consider the state vector
So consider the following Poisson bracket:
where
where
where
4 Stabilization and trajectory tracking of port-Hamiltonian dynamic systems by quaternion-based controllers
Consider the following quaternion-based NN controller:
for the quaternion variable
so by separating the scalar quaternion part and the vector quaternion part yields
in which the NN parameters are given by the positive definite matrix
4.1 Stabilization of a port-Hamiltonian system with quaternion-based NNs
The stabilization is achieved by selecting a suitable control law obtained by selecting an appropriate Lyapunov functional, as appears in the following theorem:
Theorem 1
System (6) is stabilized by the following control law iff:
where the NN controller input
Proof
Consider the following Lyapunov functional:
The derivative of the previous Lyapunov functional is obtained as follows:
yielding
Now, substituting (10) into the previous equation yields
So the system is globally asymptotically stable, and the proof is complete.□
4.2 Trajectory tracking of a port-Hamiltonian system by quaternion-based NN
Taking into consideration that the trajectory tracking control for PH systems is important in many real systems, in this subsection, it is evinced the synthesis of these kinds of controllers. First as explained earlier, the quaternion NN is divided into four parts in order to obtain a feasible mathematical model for controller synthesis. The error variables for the position
where
Theorem 2
The following control law makes the error dynamics (15) asymptotically stable iff:
for the NN input
Proof
Consider the following:
Now, the derivative of the previous Lyapunov functional is given by
Now, substituting the control law (16) into the previous equation yields
So the proof is complete, and the system is asymptotically stable.□
5 Experiments
For experimental purposes, the following Hamiltonian that represents a particle movement is presented as follows:
So by the implementation of the Poisson bracket, the representation is obtained as follows:
where
5.1 Experiment 1: Stabilization
In the following experiment, the results of the stabilization of a PH system by quaternion-based NNs are presented. Consider the following value for the gain:
In Figures 1 and 2, the stabilized variables of the PH system for the momentum are evinced in order to observe the evolution in time for the momentum variables in the

Momentum

Momentum
Meanwhile, in Figures 3 and 4, it is evinced the evolution in time of the position variables for the

Position

Position
Meanwhile, in Figures 5 and 6, the control effort input is shown, and as it is verified, the control effort drives the system variables to the origin in finite time. The action of the controller provides the sufficient control effort in order to drive the position and momentum variable to zero.

Input variable

Input variable
5.2 Experiment 2: trajectory tracking
In this section, the trajectory tracking of a port-Hamiltonian system is presented in order to drive the reference variables to the final desired value in finite time and the results obtained with the proposed controller are compared with [58,68]. The parameter gains for this simulation setup are given by
In Figures 7 and 8, the evolution in time of the momentum in the

Momentum

Momentum
Meanwhile, in Figures 9 and 10 are presented the results of the evolution in time of the control inputs

Input
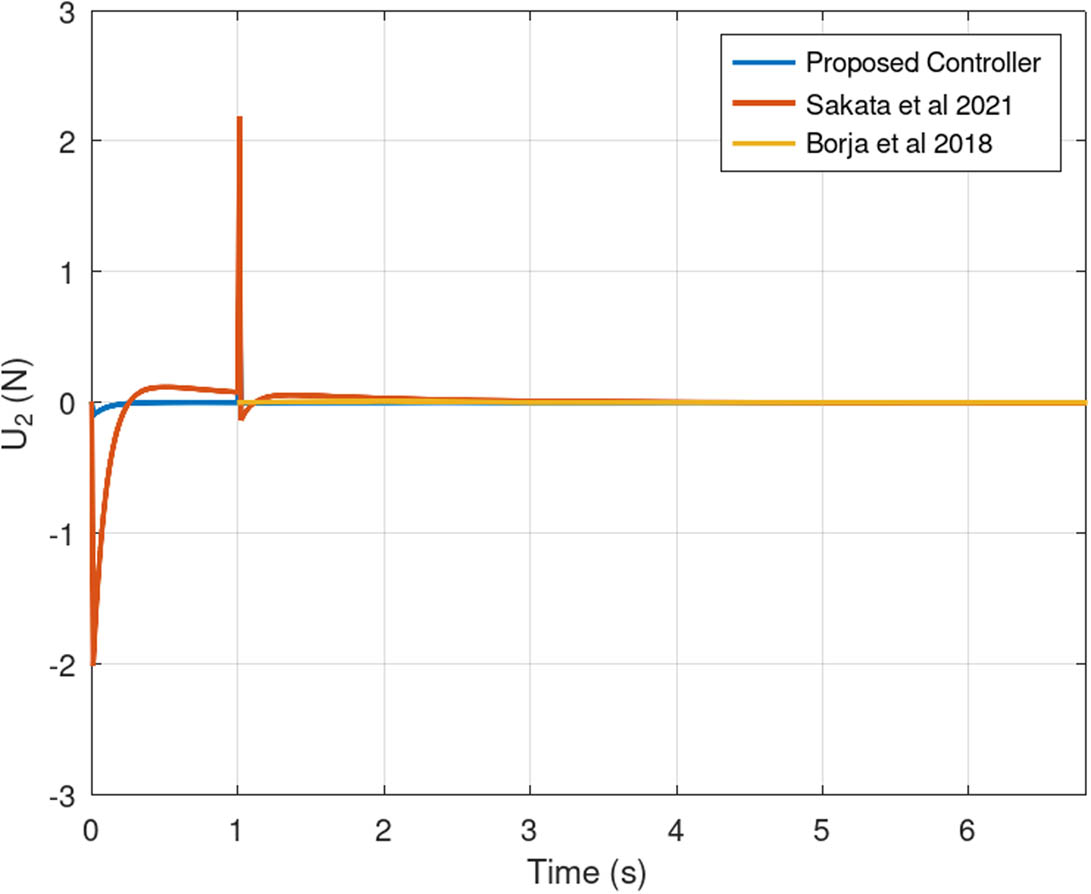
Input
Finally, in Figure 11, the evolution in time of the quaternion-valued NN controller are presented for the scalar and vectorial part of the quaternion. It is verified how this quaternion-valued NN reaches the final value in finite time.

Quaternion-based variable
5.3 Experiment 3: Angular velocity trajectory tracking of an induction machine
Consider the following dq transformation for a three-phase electric motor [69]:
in which in synchronous rotating reference frame is
in which the three-phase voltages used in the numerical experiment have an source amplitude of
with the respective voltages and currents as specified in [69].
Consider the following state vector
where
Consider the following Hamiltonian
in which
with the following operators:
where
where
For this numerical experiment, a torque load
In Figures 12 and 13, the angular velocity of the motor rotor is depicted with the respective error. It is noted how the angular velocity reaches the synchronous speed in finite time by driving the error to zero.

Rotor angular velocity.

Rotor angular velocity error.
Meanwhile, in Figure 14, the currents are shown evincing that the currents reach the steady-state value in finite time.

Stator and rotor currents. (a)
Finally, in Figures 15 and 16 are shown the three-phase input voltages along with the motor torque as they vary in time.

Input voltages for the

Motor torque.
6 Results and discussion
In this section, the discussion of the theoretical and experimental results of this research study is presented in order to analyze its contributions. As shown in the theoretical part of this research study, first the PH system is simplified by the implementation of a Poisson bracket in order to synthesize the derivation of the NN controller. The Poisson brackets allow us to obtain the port-Hamiltonian formulation, and at the same time, it provides a compact representation of these kinds of systems. In this research study is only considered that the port-Hamiltonian system is for one and multi-particle systems; in other words, these can be implemented for the representation by port-Hamiltonian systems that model the dynamics of electrical, mechanical, molecular, and diverse types of physical systems.
In the case of the numerical experiment simulation, it is verified efficiently how the port-Hamiltonian system is stabilized taking into account the dynamics of a particle. It is important to note that the quaternion NN controller stabilizes the position and the momentum variable. The quaternion NN controller acts as a stabilizer for this system taking into consideration the dynamic properties of this port-Hamiltonian system. Apart, the proposed port-Hamiltonian system is driven to a final desired value using a reference trajectory taking into consideration the flexibility of a quaternion NN controller by selecting the appropriate gain matrices, the system position, and momentum variables to the final desired variables. With these numerical experiments, the derivation of NN control laws by the selection of appropriate Lyapunov functions is verified.
7 Conclusion
In this research study, the derivation of a stabilizer and a trajectory tracking control law is shown, based on a quaternion-based NN. It is important to consider that in both cases, the quaternion-based NN is divided into the scalar and vectorial quaternion part, in order to obtain the suitable control laws in order to drive the system variables, the momentum and position variables, to the final desired value in finite time. It is important to take into consideration that the Poisson brackets are implemented in order to simplify the mathematical deductions taking into consideration that the mathematical derivations of the port-Hamiltonian mathematical formalism are compact and simple. By means of two numerical examples, the theory shown in this article is verified and validated. The control laws are obtained by selecting suitable Lyapunov functionals in order to make the system stable. It is important to clarify that the theoretical results obtained in this research study were compared with passivity-based strategies, taking into consideration that energy-based controllers are commonly designed to control and stabilizes port-Hamiltonian systems. The experimental results prove that the proposed control strategy yields a better closed-loop performance in comparison with passivity-based control due to a better time response.
-
Funding information: This research work was funded by Institutional Fund Projects under Grant No. IFPIP: 144-611-1443. The authors gratefully acknowledge technical and financial support provided by the Ministry of Education and King Abdulaziz University, DSR, Jeddah, Saudi Arabia.
-
Author contributions: Fawaz E. Alsaadi: revision, edition, methods. Fernando E. Serrano: revision, edition, methods, simulation, experiments. Larissa M. Batrancea: revision, edition, methods.
-
Conflict of interest: Authors state no conflict of interest.
References
[1] L. M. Batrancea, A. Nichita, M. A. Balcı, and A. Akgüller, Empirical investigation on how wellbeing-related infrastructure shapes economic growth: Evidence from the european union regions, PLos One 18 (2023), 1–28. 10.1371/journal.pone.0283277Search in Google Scholar PubMed PubMed Central
[2] L. M. Batrancea, The hard worker, the hard earner, the young and the educated: Empirical study on economic growth across 11 CEE countries, Sustain. 15 (2023), no. 22, 15996.10.3390/su152215996Search in Google Scholar
[3] A. Khan, S. Hayat, Y. Zhong, A. Arif, L. Zada, and M. Fang, Computational and topological properties of neural networks by means of graph-theoretic parameters, Alexandria Eng. J. 66 (2022), 957–977. 10.1016/j.aej.2022.11.001Search in Google Scholar
[4] I. Famelis, A. Donas, and G. Galanis, Comparative study of feedforward and radial basis function neural networks for solving an environmental boundary value problem, Results Appl. Math. 16 (2022), 100344. 10.1016/j.rinam.2022.100344Search in Google Scholar
[5] Y. Chen, N. Zhang, and J. Yang, A survey of recent advances on stability analysis, state estimation and synchronization control for neural networks, Neurocomputing 515 (2023), 26–36. 10.1016/j.neucom.2022.10.020Search in Google Scholar
[6] A. Benfenati and A. Marta, A singular Riemannian geometry approach to deep neural networks ii. reconstruction of 1-d equivalence classes, Neural Networks 158 (2023), 344–358. 10.1016/j.neunet.2022.11.026Search in Google Scholar PubMed
[7] S. Coulibaly, B. Kamsu-Foguem, D. Kamissoko, and D. Traore, Deep convolution neural network sharing for the multi-label images classification, Machine Learn. Appl. 10 (2022), 100422. 10.1016/j.mlwa.2022.100422Search in Google Scholar
[8] C. G. S. Capanema, G. S. de Oliveira, F. A. Silva, T. R. M. B. Silva, and A. A. F. Loureiro, Combining recurrent and graph neural networks to predict the next place’s category, Ad Hoc Networks 138 (2023), 103016. 10.1016/j.adhoc.2022.103016Search in Google Scholar
[9] Y. Chen, Y. Xue, X. Yang, and X. Zhang, A direct analysis method to Lagrangian global exponential stability for quaternion memristive neural networks with mixed delays, Appl. Math. Comput. 439 (2023), 127633. 10.1016/j.amc.2022.127633Search in Google Scholar
[10] S. Chen, H.-L. Li, H. Bao, L. Zhang, H. Jiang, and Z. Li, Global Mittage-Leffler stability and synchronization of discrete-time fractional-order delayed quaternion-valued neural networks, Neurocomputing 511 (2022), 290–298. 10.1016/j.neucom.2022.09.035Search in Google Scholar
[11] Q. Song, L. Yang, Y. Liu, and F. E. Alsaadi, Stability of quaternion-valued neutral-type neural networks with leakage delay and proportional delays, Neurocomputing 521 (2023), 191–198. 10.1016/j.neucom.2022.12.009Search in Google Scholar
[12] W. Shang, W. Zhang, D. Chen, and J. Cao, New criteria of finite time synchronization of fractional-order quaternion-valued neural networks with time delay, Appl. Math. Comput. 436 (2023), 127484. 10.1016/j.amc.2022.127484Search in Google Scholar
[13] Q. Song, R. Zeng, Z. Zhao, Y. Liu, and F. E. Alsaadi, Mean-square stability of stochastic quaternion-valued neural networks with variable coefficients and neutral delays, Neurocomputing 471 (2022), 130–138. 10.1016/j.neucom.2021.11.033Search in Google Scholar
[14] T. Peng, J. Lu, Z. Tu, and J. Lou, Finite-time stabilization of quaternion-valued neural networks with time delays: An implicit function method, Inform. Sci. 613 (2022), 747–762. 10.1016/j.ins.2022.09.014Search in Google Scholar
[15] I. Brevis, I. Muga, and K. G. van der Zee, Neural control of discrete weak formulations: Galerkin, least squares & minimal-residual methods with quasi-optimal weights, Comput. Methods Appl. Mech. Eng. 402 (2022), 115716, A Special Issue in Honor of the Lifetime Achievements of J. Tinsley Oden. 10.1016/j.cma.2022.115716Search in Google Scholar
[16] F. W. Alsaade, Q. Yao, M. S. Al-Zahrani, A. S. Alzahrani, and H. Jahanshahi, Neural-based fixed-time attitude tracking control for space vehicle subject to constrained outputs, Adv. Space Res. 71 (2023), no. 9, 3588–3599. 10.1016/j.asr.2022.07.081Search in Google Scholar
[17] H. Jahanshahi, Q. Yao, M. Ijaz Khan, and I. Moroz, Unified neural output-constrained control for space manipulator using tan-type barrier lyapunov function, Adv. Space Res. 71 (2022), 3712–3722. 10.1016/j.asr.2022.11.015Search in Google Scholar
[18] G. Zhou and D. Tan, Review of nuclear power plant control research: Neural network-based methods, Ann. Nuclear Energy 181 (2023), 109513. 10.1016/j.anucene.2022.109513Search in Google Scholar
[19] P. Nguyen, N. Thanh, and H. P. Huy Anh, Advanced neural control technique for autonomous underwater vehicles using modified integral barrier lyapunov function, Ocean Eng. 266 (2022), 112842. 10.1016/j.oceaneng.2022.112842Search in Google Scholar
[20] D. Zeng, Z. Liu, C. L. Philip Chen, Y. Zhang, and Z. Wu, Decentralized adaptive neural asymptotic control of switched nonlinear interconnected systems with predefined tracking performance, Neurocomputing 510 (2022), 37–47. 10.1016/j.neucom.2022.08.062Search in Google Scholar
[21] F. De Vleeschauwer, M. Caluwé, T. Dobbeleers, H. Stes, L. Dockx, F. Kiekens, et al. A dynamic control system for aerobic granular sludge reactors treating high cod/p wastewater, using ph and do sensors, J. Water Process Eng. 33 (2020), 101065. 10.1016/j.jwpe.2019.101065Search in Google Scholar
[22] G. Bayili, S. Nicaise, and R. Silga, Rational energy decay rate for the wave equation with delay term on the dynamical control, J. Math. Anal. Appl. 495 (2021), no. 1, 124693. 10.1016/j.jmaa.2020.124693Search in Google Scholar
[23] A.-S. Kyriakides, A. I. Papadopoulos, P. Seferlis, and I. Hassan, Dynamic modelling and control of single, double and triple effect absorption refrigeration cycles, Energy 210 (2020), 118529. 10.1016/j.energy.2020.118529Search in Google Scholar
[24] X. Shi, Y. Cheng, C. Yin, X. Huang, and S. Ming Zhong, Design of adaptive backstepping dynamic surface control method with RBF neural network for uncertain nonlinear system, Neurocomputing 330 (2019), 490–503. 10.1016/j.neucom.2018.11.029Search in Google Scholar
[25] Z. Zhou, D. Tong, Q. Chen, W. Zhou, and Y. Xu, Adaptive nn control for nonlinear systems with uncertainty based on dynamic surface control, Neurocomputing 421 (2021), 161–172. 10.1016/j.neucom.2020.09.026Search in Google Scholar
[26] S. Feng, Y. Kawano, M. Cucuzzella, and J. M. A. Scherpen, Output consensus control for linear port-Hamiltonian systems, IFAC-PapersOnLine 55 (2022), no. 30, 230–235, 25th International Symposium on Mathematical Theory of Networks and Systems MTNS 2022. 10.1016/j.ifacol.2022.11.057Search in Google Scholar
[27] A. Brugnoli, R. Rashad, and S. Stramigioli, Dual field structure-preserving discretization of port-Hamiltonian systems using finite element exterior calculus, J. Comput. Phys. 471 (2022), 111601. 10.1016/j.jcp.2022.111601Search in Google Scholar
[28] L. A. Mora and K. Morris, Exponential decay rate of port-Hamiltonian systems with one side boundary damping, IFAC-PapersOnLine 55 (2022), no. 30, 400–405, 25th International Symposium on Mathematical Theory of Networks and Systems MTNS 2022. 10.1016/j.ifacol.2022.11.086Search in Google Scholar
[29] D. Tamiru Tefera, S. Dubljevic, and V. Prasad, A port Hamiltonian approach to dynamical chemical process systems network modeling and analysis, Chem. Eng. Sci. 261 (2022), 117907. 10.1016/j.ces.2022.117907Search in Google Scholar
[30] J. Jäschke, N. Skrepek, and M. Ehrhardt, Mixed-dimensional geometric coupling of port-Hamiltonian systems, Appl. Math. Lett. 137 (2023), 108508. 10.1016/j.aml.2022.108508Search in Google Scholar
[31] T. H. Pham, N. M. T. Vu, I. Prodan, and L. Lefèvre, A combined control by interconnection-model predictive control design for constrained port-Hamiltonian systems, Syst. Control Lett. 167 (2022), 105336. 10.1016/j.sysconle.2022.105336Search in Google Scholar
[32] W. Wei, J. Yu, L. Wang, C. Hu, and H. Jiang, Fixed/preassigned-time synchronization of quaternion-valued neural networks via pure power-law control, Neural Networks 146 (2022), 341–349. 10.1016/j.neunet.2021.11.023Search in Google Scholar PubMed
[33] J. Shu, B. Wu, L. Xiong, T. Wu, and H. Zhang, Stochastic stabilization of markov jump quaternion-valued neural network using sampled-data control, Appl. Math. Comput. 400 (2021), 126041. 10.1016/j.amc.2021.126041Search in Google Scholar
[34] R. Li and J. Cao, Dissipativity and synchronization control of quaternion-valued fuzzy memristive neural networks: Lexicographical order method, Fuzzy Sets Syst. 443 (2022), 70–89, From Learning to Modeling and Control. 10.1016/j.fss.2021.10.015Search in Google Scholar
[35] J. Shu, B. Wu, and L. Xiong, Stochastic stability criteria and event-triggered control of delayed Markovian jump quaternion-valued neural networks, Appl. Math. Comput. 420 (2022), 126904. 10.1016/j.amc.2021.126904Search in Google Scholar
[36] H.-L. Li, C. Hu, L. Zhang, H. Jiang, and J. Cao, Complete and finite-time synchronization of fractional-order fuzzy neural networks via nonlinear feedback control, Fuzzy Sets Syst. 443 (2022), 50–69, From Learning to Modeling and Control. 10.1016/j.fss.2021.11.004Search in Google Scholar
[37] R. Zhang and L. Gao, The brushless dc motor control system based on neural network fuzzy PID control of power electronics technology, Optik 271 (2022), 169879. 10.1016/j.ijleo.2022.169879Search in Google Scholar
[38] Z. Wu, B. Jiang, and Q. Gao, State estimation and fuzzy sliding mode control of nonlinear Markovian jump systems via adaptive neural network, J. Franklin Inst. 359 (2022), no. 16, 8974–8990. 10.1016/j.jfranklin.2022.09.031Search in Google Scholar
[39] A. Razzaghian, A fuzzy neural network-based fractional-order lyapunov-based robust control strategy for exoskeleton robots: Application in upper-limb rehabilitation, Math. Comput. Simulat. 193 (2022), 567–583. 10.1016/j.matcom.2021.10.022Search in Google Scholar
[40] M. Yang, Z. Sheng, G. Yin, and H. Wang, A recurrent neural network based fuzzy sliding mode control for 4-dof rov movements, Ocean Eng. 256 (2022), 111509. 10.1016/j.oceaneng.2022.111509Search in Google Scholar
[41] J. Wan, Q. Jiang, L. Liao, S. Wuuuuu, and P. Wang, A neural-network based variable universe fuzzy control method for power and axial power distribution control of large pressurized water reactors, Ann. Nuclear Energy 175 (2022), 109241. 10.1016/j.anucene.2022.109241Search in Google Scholar
[42] J. Toledo, Y. Wu, H. Ramirez, and Y. Le Gorrec, Observer design for 1-d boundary controlled port-Hamiltonian systems with different boundary measurements, IFAC-PapersOnLine 55 (2022), no. 26, 95–100, 4th IFAC Workshop on Control of Systems Governed by Partial Differential Equations CPDE 2022. 10.1016/j.ifacol.2022.10.383Search in Google Scholar
[43] R. Reyes-Báez, A. van der Schaft, and B. Jayawardhana, Virtual contractivity-based control of fully-actuated mechanical systems in the port-Hamiltonian framework, Automatica 141 (2022), 110275. 10.1016/j.automatica.2022.110275Search in Google Scholar
[44] C. Ponce, H. Ramirez, Y. L. Gorrec, and F. Vargas, A comparative study of reduced model based boundary control design for linear port Hamiltonian systems, IFAC-PapersOnLine 55 (2022), no. 26, 107–112, 4th IFAC Workshop on Control of Systems Governed by Partial Differential Equations CPDE 2022. 10.1016/j.ifacol.2022.10.385Search in Google Scholar
[45] H. Ramirez, Y. L. Gorrec, and B. Maschke, Boundary controlled irreversible port-Hamiltonian systems, Chem. Eng. Sci. 248 (2022), 117107. 10.1016/j.ces.2021.117107Search in Google Scholar
[46] B. Maschke, F. Philipp, M. Schaller, K. Worthmann, and T. Faulwasser, Optimal control of thermodynamic port-Hamiltonian systems, IFAC-PapersOnLine 55 (2022), no. 30, 55–60, 25th International Symposium on Mathematical Theory of Networks and Systems MTNS 2022. 10.1016/j.ifacol.2022.11.028Search in Google Scholar
[47] A. Brugnoli, G. Haine, and D. Matignon, Explicit structure-preserving discretization of port-Hamiltonian systems with mixed boundary control, IFAC-PapersOnLine 55 (2022), no. 30, 418–423, 25th International Symposium on Mathematical Theory of Networks and Systems MTNS 2022. 10.1016/j.ifacol.2022.11.089Search in Google Scholar
[48] T. Malzer, L. Ecker, and M. Schöberl, Energy-based control and observer design for higher-order infinite-dimensional port-Hamiltonian systems, IFAC-PapersOnLine 54 (2021), no. 19, 44–51, 7th IFAC Workshop on Lagrangian and Hamiltonian Methods for Nonlinear Control LHMNC 2021. 10.1016/j.ifacol.2021.11.053Search in Google Scholar
[49] T. Malzer, J. Toledo, Y. L. Gorrec, and M. Schöberl, Energy-based in-domain control and observer design for infinite-dimensional port-Hamiltonian systems, IFAC-PapersOnLine 54 (2021), no. 9, 468–475, 24th International Symposium on Mathematical Theory of Networks and Systems MTNS 2020. 10.1016/j.ifacol.2021.06.104Search in Google Scholar
[50] M. Schaller, F. Philipp, T. Faulwasser, K. Worthmann, and B. Maschke, Control of port-Hamiltonian systems with minimal energy supply, Europ. J. Control 62 (2021), 33–40, 2021 European Control Conference Special Issue. 10.1016/j.ejcon.2021.06.017Search in Google Scholar
[51] T. Malzer, H. Rams, and M. Schöberl, On structural invariants in the energy-based in-domain control of infinite-dimensional port-Hamiltonian systems, Syst. Control Lett. 145 (2020), 104778. 10.1016/j.sysconle.2020.104778Search in Google Scholar
[52] A. Macchelli, Y. L. Gorrec, and H. Ramirez, Asymptotic stabilisation of distributed port-Hamiltonian systems by boundary energy-shaping control, IFAC-PapersOnLine 48 (2015), no. 1, 488–493, 8th Vienna International Conferenceon Mathematical Modelling. 10.1016/j.ifacol.2015.05.143Search in Google Scholar
[53] W. M. Haddad, T. Rajpurohit, and X. Jin, Energy-based feedback control for stochastic port-controlled Hamiltonian systems, Automatica 97 (2018), 134–142. 10.1016/j.automatica.2018.07.031Search in Google Scholar
[54] F. Lamoline, Passivity of boundary controlled and observed stochastic port-Hamiltonian systems subject to multiplicative and input noise, Europ. J. Control 62 (2021), 41–46. 10.1016/j.ejcon.2021.06.010Search in Google Scholar
[55] K. Hamada, P. Borja, K. Fujimoto, I. Maruta, and J. M. A. Scherpen, On passivity-based high-order compensators for mechanical port-Hamiltonian systems without velocity measurements the work was supported in part by mori manufacturing research and technology foundation, IFAC-PapersOnLine 54 (2021), no. 14, 287–292, 3rd IFAC Conference on Modelling, Identification and Control of Nonlinear Systems MICNON 2021. 10.1016/j.ifacol.2021.10.367Search in Google Scholar
[56] H. Ramirez, Y. L. Gorrec, B. Maschke, and F. Couenne, Passivity based control of irreversible port Hamiltonian systems, IFAC Proc. Vol. 46 (2013), no. 14, 84–89, 1st IFAC Workshop on Thermodynamic Foundations of Mathematical Systems Theory. 10.3182/20130714-3-FR-4040.00012Search in Google Scholar
[57] G. Nishida, K. Yamaguchi, and No. Sakamoto, Optimality of passivity-based controls for distributed port-Hamiltonian systems, IFAC Proc. Vol. 46 (2013), no. 23, 146–151, 9th IFAC Symposium on Nonlinear Control Systems. 10.3182/20130904-3-FR-2041.00193Search in Google Scholar
[58] N. Sakata, K. Fujimoto, and I. Maruta, On trajectory tracking control of simple port-Hamiltonian systems based on passivity based sliding mode control, IFAC-PapersOnLine 54 (2021), no. 19, 38–43, 7th IFAC Workshop on Lagrangian and Hamiltonian Methods for Nonlinear Control LHMNC 2021. 10.1016/j.ifacol.2021.11.052Search in Google Scholar
[59] F. Castannnos and D. Gromov, Passivity-based control of implicit port-Hamiltonian systems with holonomic constraints, Syst. Control Lett. 94 (2016), 11–18. 10.1016/j.sysconle.2016.04.004Search in Google Scholar
[60] J. Pan and Z. Zhang, Finite-time synchronization for delayed complex-valued neural networks via the exponential-type controllers of time variable, Chaos Solitons Fractals 146 (2021), 110897. 10.1016/j.chaos.2021.110897Search in Google Scholar
[61] J. Feng, Y. Chai, and C. Xu, A novel neural network to nonlinear complex-variable constrained nonconvex optimization, J. Franklin Inst. 358 (2021), no. 8, 4435–4457. 10.1016/j.jfranklin.2021.02.029Search in Google Scholar
[62] Q. Song, Q. Yu, Z. Zhao, Y. Liu, and F. E. Alsaadi, Dynamics of complex-valued neural networks with variable coefficients and proportional delays, Neurocomputing 275 (2018), 2762–2768. 10.1016/j.neucom.2017.11.041Search in Google Scholar
[63] W. Li, H. Xu, X. Liu, Y. Wang, Y. Zhu, X. Lin, et al., Regenerative braking control strategy for pure electric vehicles based on fuzzy neural network, Ain Shams Eng. J. 15 (2023), 102430. 10.1016/j.asej.2023.102430Search in Google Scholar
[64] U. Kadak and L. Coroianu, Integrating multivariate fuzzy neural networks into fuzzy inference system for enhanced decision making, Fuzzy Sets Syst. 470 (2023), 108668. 10.1016/j.fss.2023.108668Search in Google Scholar
[65] A. M. El-Nagar, M. El-Bardini, and A. Aziz Khater, Recurrent general type-2 fuzzy neural networks for nonlinear dynamic systems identification, ISA Trans. 140 (2023), 170–182. 10.1016/j.isatra.2023.06.003Search in Google Scholar PubMed
[66] S. Nguyen and A. A. Turski, Examples of the dirac approach to dynamics of systems with constraints, Phys A Stat Mechanics Appl. 290 (2001), no. 3, 431–444. 10.1016/S0378-4371(00)00449-0Search in Google Scholar
[67] C. Chandre, Incomplete dirac reduction of constrained Hamiltonian systems, Ann. Phys. 361 (2015), 1–13. 10.1016/j.aop.2015.06.011Search in Google Scholar
[68] P. Borja, R. Ortega, and E. Nuño, New results on PID passivity-based controllers for port-Hamiltonian systems, IFAC-PapersOnLine 51 (2018), no. 3, 175–180, 6th IFAC Workshop on Lagrangian and Hamiltonian Methods for Nonlinear Control LHMNC 2018. 10.1016/j.ifacol.2018.06.049Search in Google Scholar
[69] R. Krishnan, Electric Motor Drives, Modeling, Analysis and Control, Prentice Hall, New Delhi, 2006. Search in Google Scholar
© 2024 the author(s), published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Regular Articles
- On the p-fractional Schrödinger-Kirchhoff equations with electromagnetic fields and the Hardy-Littlewood-Sobolev nonlinearity
- L-Fuzzy fixed point results in ℱ -metric spaces with applications
- Solutions of a coupled system of hybrid boundary value problems with Riesz-Caputo derivative
- Nonparametric methods of statistical inference for double-censored data with applications
- LADM procedure to find the analytical solutions of the nonlinear fractional dynamics of partial integro-differential equations
- Existence of projected solutions for quasi-variational hemivariational inequality
- Spectral collocation method for convection-diffusion equation
- New local fractional Hermite-Hadamard-type and Ostrowski-type inequalities with generalized Mittag-Leffler kernel for generalized h-preinvex functions
- On the asymptotics of eigenvalues for a Sturm-Liouville problem with symmetric single-well potential
- On exact rate of convergence of row sequences of multipoint Hermite-Padé approximants
- The essential norm of bounded diagonal infinite matrices acting on Banach sequence spaces
- Decay rate of the solutions to the Cauchy problem of the Lord Shulman thermoelastic Timoshenko model with distributed delay
- Enhancing the accuracy and efficiency of two uniformly convergent numerical solvers for singularly perturbed parabolic convection–diffusion–reaction problems with two small parameters
- An inertial shrinking projection self-adaptive algorithm for solving split variational inclusion problems and fixed point problems in Banach spaces
- An equation for complex fractional diffusion created by the Struve function with a T-symmetric univalent solution
- On the existence and Ulam-Hyers stability for implicit fractional differential equation via fractional integral-type boundary conditions
- Some properties of a class of holomorphic functions associated with tangent function
- The existence of multiple solutions for a class of upper critical Choquard equation in a bounded domain
- On the continuity in q of the family of the limit q-Durrmeyer operators
- Results on solutions of several systems of the product type complex partial differential difference equations
- On Berezin norm and Berezin number inequalities for sum of operators
- Geometric invariants properties of osculating curves under conformal transformation in Euclidean space ℝ3
- On a generalization of the Opial inequality
- A novel numerical approach to solutions of fractional Bagley-Torvik equation fitted with a fractional integral boundary condition
- Holomorphic curves into projective spaces with some special hypersurfaces
- On Periodic solutions for implicit nonlinear Caputo tempered fractional differential problems
- Approximation of complex q-Beta-Baskakov-Szász-Stancu operators in compact disk
- Existence and regularity of solutions for non-autonomous integrodifferential evolution equations involving nonlocal conditions
- Jordan left derivations in infinite matrix rings
- Nonlinear nonlocal elliptic problems in ℝ3: existence results and qualitative properties
- Invariant means and lacunary sequence spaces of order (α, β)
- Novel results for two families of multivalued dominated mappings satisfying generalized nonlinear contractive inequalities and applications
- Global in time well-posedness of a three-dimensional periodic regularized Boussinesq system
- Existence of solutions for nonlinear problems involving mixed fractional derivatives with p(x)-Laplacian operator
- Some applications and maximum principles for multi-term time-space fractional parabolic Monge-Ampère equation
- On three-dimensional q-Riordan arrays
- Some aspects of normal curve on smooth surface under isometry
- Mittag-Leffler-Hyers-Ulam stability for a first- and second-order nonlinear differential equations using Fourier transform
- Topological structure of the solution sets to non-autonomous evolution inclusions driven by measures on the half-line
- Remark on the Daugavet property for complex Banach spaces
- Decreasing and complete monotonicity of functions defined by derivatives of completely monotonic function involving trigamma function
- Uniqueness of meromorphic functions concerning small functions and derivatives-differences
- Asymptotic approximations of Apostol-Frobenius-Euler polynomials of order α in terms of hyperbolic functions
- Hyers-Ulam stability of Davison functional equation on restricted domains
- Involvement of three successive fractional derivatives in a system of pantograph equations and studying the existence solution and MLU stability
- Composition of some positive linear integral operators
- On bivariate fractal interpolation for countable data and associated nonlinear fractal operator
- Generalized result on the global existence of positive solutions for a parabolic reaction-diffusion model with an m × m diffusion matrix
- Online makespan minimization for MapReduce scheduling on multiple parallel machines
- The sequential Henstock-Kurzweil delta integral on time scales
- On a discrete version of Fejér inequality for α-convex sequences without symmetry condition
- Existence of three solutions for two quasilinear Laplacian systems on graphs
- Embeddings of anisotropic Sobolev spaces into spaces of anisotropic Hölder-continuous functions
- Nilpotent perturbations of m-isometric and m-symmetric tensor products of commuting d-tuples of operators
- Characterizations of transcendental entire solutions of trinomial partial differential-difference equations in ℂ2#
- Fractional Sturm-Liouville operators on compact star graphs
- Exact controllability for nonlinear thermoviscoelastic plate problem
- Improved modified gradient-based iterative algorithm and its relaxed version for the complex conjugate and transpose Sylvester matrix equations
- Superposition operator problems of Hölder-Lipschitz spaces
- A note on λ-analogue of Lah numbers and λ-analogue of r-Lah numbers
- Ground state solutions and multiple positive solutions for nonhomogeneous Kirchhoff equation with Berestycki-Lions type conditions
- A note on 1-semi-greedy bases in p-Banach spaces with 0 < p ≤ 1
- Fixed point results for generalized convex orbital Lipschitz operators
- Asymptotic model for the propagation of surface waves on a rotating magnetoelastic half-space
- Multiplicity of k-convex solutions for a singular k-Hessian system
- Poisson C*-algebra derivations in Poisson C*-algebras
- Signal recovery and polynomiographic visualization of modified Noor iteration of operators with property (E)
- Approximations to precisely localized supports of solutions for non-linear parabolic p-Laplacian problems
- Solving nonlinear fractional differential equations by common fixed point results for a pair of (α, Θ)-type contractions in metric spaces
- Pseudo compact almost automorphic solutions to a family of delay differential equations
- Periodic measures of fractional stochastic discrete wave equations with nonlinear noise
- Asymptotic study of a nonlinear elliptic boundary Steklov problem on a nanostructure
- Cramer's rule for a class of coupled Sylvester commutative quaternion matrix equations
- Quantitative estimates for perturbed sampling Kantorovich operators in Orlicz spaces
- Review Articles
- Penalty method for unilateral contact problem with Coulomb's friction in time-fractional derivatives
- Differential sandwich theorems for p-valent analytic functions associated with a generalization of the integral operator
- Special Issue on Development of Fuzzy Sets and Their Extensions - Part II
- Higher-order circular intuitionistic fuzzy time series forecasting methodology: Application of stock change index
- Binary relations applied to the fuzzy substructures of quantales under rough environment
- Algorithm selection model based on fuzzy multi-criteria decision in big data information mining
- A new machine learning approach based on spatial fuzzy data correlation for recognizing sports activities
- Benchmarking the efficiency of distribution warehouses using a four-phase integrated PCA-DEA-improved fuzzy SWARA-CoCoSo model for sustainable distribution
- Special Issue on Application of Fractional Calculus: Mathematical Modeling and Control - Part II
- A study on a type of degenerate poly-Dedekind sums
- Efficient scheme for a category of variable-order optimal control problems based on the sixth-kind Chebyshev polynomials
- Special Issue on Mathematics for Artificial intelligence and Artificial intelligence for Mathematics
- Toward automated hail disaster weather recognition based on spatio-temporal sequence of radar images
- The shortest-path and bee colony optimization algorithms for traffic control at single intersection with NetworkX application
- Neural network quaternion-based controller for port-Hamiltonian system
- Matching ontologies with kernel principle component analysis and evolutionary algorithm
- Survey on machine vision-based intelligent water quality monitoring techniques in water treatment plant: Fish activity behavior recognition-based schemes and applications
- Artificial intelligence-driven tone recognition of Guzheng: A linear prediction approach
- Transformer learning-based neural network algorithms for identification and detection of electronic bullying in social media
- Squirrel search algorithm-support vector machine: Assessing civil engineering budgeting course using an SSA-optimized SVM model
- Special Issue on International E-Conference on Mathematical and Statistical Sciences - Part I
- Some fixed point results on ultrametric spaces endowed with a graph
- On the generalized Mellin integral operators
- On existence and multiplicity of solutions for a biharmonic problem with weights via Ricceri's theorem
- Approximation process of a positive linear operator of hypergeometric type
- On Kantorovich variant of Brass-Stancu operators
- A higher-dimensional categorical perspective on 2-crossed modules
- Special Issue on Some Integral Inequalities, Integral Equations, and Applications - Part I
- On parameterized inequalities for fractional multiplicative integrals
- On inverse source term for heat equation with memory term
- On Fejér-type inequalities for generalized trigonometrically and hyperbolic k-convex functions
- New extensions related to Fejér-type inequalities for GA-convex functions
- Derivation of Hermite-Hadamard-Jensen-Mercer conticrete inequalities for Atangana-Baleanu fractional integrals by means of majorization
- Some Hardy's inequalities on conformable fractional calculus
- The novel quadratic phase Fourier S-transform and associated uncertainty principles in the quaternion setting
- Special Issue on Recent Developments in Fixed-Point Theory and Applications - Part I
- A novel iterative process for numerical reckoning of fixed points via generalized nonlinear mappings with qualitative study
- Some new fixed point theorems of α-partially nonexpansive mappings
- Generalized Yosida inclusion problem involving multi-valued operator with XOR operation
- Periodic and fixed points for mappings in extended b-gauge spaces equipped with a graph
- Convergence of Peaceman-Rachford splitting method with Bregman distance for three-block nonconvex nonseparable optimization
- Topological structure of the solution sets to neutral evolution inclusions driven by measures
- (α, F)-Geraghty-type generalized F-contractions on non-Archimedean fuzzy metric-unlike spaces
-
Solvability of infinite system of integral equations of Hammerstein type in three variables in tempering sequence spaces
- Special Issue on Nonlinear Evolution Equations and Their Applications - Part I
- Fuzzy fractional delay integro-differential equation with the generalized Atangana-Baleanu fractional derivative
- Klein-Gordon potential in characteristic coordinates
- Asymptotic analysis of Leray solution for the incompressible NSE with damping
- Special Issue on Blow-up Phenomena in Nonlinear Equations of Mathematical Physics - Part I
- Long time decay of incompressible convective Brinkman-Forchheimer in L2(ℝ3)
- Numerical solution of general order Emden-Fowler-type Pantograph delay differential equations
- Global smooth solution to the n-dimensional liquid crystal equations with fractional dissipation
- Spectral properties for a system of Dirac equations with nonlinear dependence on the spectral parameter
- A memory-type thermoelastic laminated beam with structural damping and microtemperature effects: Well-posedness and general decay
- The asymptotic behavior for the Navier-Stokes-Voigt-Brinkman-Forchheimer equations with memory and Tresca friction in a thin domain
- Absence of global solutions to wave equations with structural damping and nonlinear memory
- Special Issue on Differential Equations and Numerical Analysis - Part I
- Vanishing viscosity limit for a one-dimensional viscous conservation law in the presence of two noninteracting shocks
- Limiting dynamics for stochastic complex Ginzburg-Landau systems with time-varying delays on unbounded thin domains
- A comparison of two nonconforming finite element methods for linear three-field poroelasticity
Articles in the same Issue
- Regular Articles
- On the p-fractional Schrödinger-Kirchhoff equations with electromagnetic fields and the Hardy-Littlewood-Sobolev nonlinearity
- L-Fuzzy fixed point results in ℱ -metric spaces with applications
- Solutions of a coupled system of hybrid boundary value problems with Riesz-Caputo derivative
- Nonparametric methods of statistical inference for double-censored data with applications
- LADM procedure to find the analytical solutions of the nonlinear fractional dynamics of partial integro-differential equations
- Existence of projected solutions for quasi-variational hemivariational inequality
- Spectral collocation method for convection-diffusion equation
- New local fractional Hermite-Hadamard-type and Ostrowski-type inequalities with generalized Mittag-Leffler kernel for generalized h-preinvex functions
- On the asymptotics of eigenvalues for a Sturm-Liouville problem with symmetric single-well potential
- On exact rate of convergence of row sequences of multipoint Hermite-Padé approximants
- The essential norm of bounded diagonal infinite matrices acting on Banach sequence spaces
- Decay rate of the solutions to the Cauchy problem of the Lord Shulman thermoelastic Timoshenko model with distributed delay
- Enhancing the accuracy and efficiency of two uniformly convergent numerical solvers for singularly perturbed parabolic convection–diffusion–reaction problems with two small parameters
- An inertial shrinking projection self-adaptive algorithm for solving split variational inclusion problems and fixed point problems in Banach spaces
- An equation for complex fractional diffusion created by the Struve function with a T-symmetric univalent solution
- On the existence and Ulam-Hyers stability for implicit fractional differential equation via fractional integral-type boundary conditions
- Some properties of a class of holomorphic functions associated with tangent function
- The existence of multiple solutions for a class of upper critical Choquard equation in a bounded domain
- On the continuity in q of the family of the limit q-Durrmeyer operators
- Results on solutions of several systems of the product type complex partial differential difference equations
- On Berezin norm and Berezin number inequalities for sum of operators
- Geometric invariants properties of osculating curves under conformal transformation in Euclidean space ℝ3
- On a generalization of the Opial inequality
- A novel numerical approach to solutions of fractional Bagley-Torvik equation fitted with a fractional integral boundary condition
- Holomorphic curves into projective spaces with some special hypersurfaces
- On Periodic solutions for implicit nonlinear Caputo tempered fractional differential problems
- Approximation of complex q-Beta-Baskakov-Szász-Stancu operators in compact disk
- Existence and regularity of solutions for non-autonomous integrodifferential evolution equations involving nonlocal conditions
- Jordan left derivations in infinite matrix rings
- Nonlinear nonlocal elliptic problems in ℝ3: existence results and qualitative properties
- Invariant means and lacunary sequence spaces of order (α, β)
- Novel results for two families of multivalued dominated mappings satisfying generalized nonlinear contractive inequalities and applications
- Global in time well-posedness of a three-dimensional periodic regularized Boussinesq system
- Existence of solutions for nonlinear problems involving mixed fractional derivatives with p(x)-Laplacian operator
- Some applications and maximum principles for multi-term time-space fractional parabolic Monge-Ampère equation
- On three-dimensional q-Riordan arrays
- Some aspects of normal curve on smooth surface under isometry
- Mittag-Leffler-Hyers-Ulam stability for a first- and second-order nonlinear differential equations using Fourier transform
- Topological structure of the solution sets to non-autonomous evolution inclusions driven by measures on the half-line
- Remark on the Daugavet property for complex Banach spaces
- Decreasing and complete monotonicity of functions defined by derivatives of completely monotonic function involving trigamma function
- Uniqueness of meromorphic functions concerning small functions and derivatives-differences
- Asymptotic approximations of Apostol-Frobenius-Euler polynomials of order α in terms of hyperbolic functions
- Hyers-Ulam stability of Davison functional equation on restricted domains
- Involvement of three successive fractional derivatives in a system of pantograph equations and studying the existence solution and MLU stability
- Composition of some positive linear integral operators
- On bivariate fractal interpolation for countable data and associated nonlinear fractal operator
- Generalized result on the global existence of positive solutions for a parabolic reaction-diffusion model with an m × m diffusion matrix
- Online makespan minimization for MapReduce scheduling on multiple parallel machines
- The sequential Henstock-Kurzweil delta integral on time scales
- On a discrete version of Fejér inequality for α-convex sequences without symmetry condition
- Existence of three solutions for two quasilinear Laplacian systems on graphs
- Embeddings of anisotropic Sobolev spaces into spaces of anisotropic Hölder-continuous functions
- Nilpotent perturbations of m-isometric and m-symmetric tensor products of commuting d-tuples of operators
- Characterizations of transcendental entire solutions of trinomial partial differential-difference equations in ℂ2#
- Fractional Sturm-Liouville operators on compact star graphs
- Exact controllability for nonlinear thermoviscoelastic plate problem
- Improved modified gradient-based iterative algorithm and its relaxed version for the complex conjugate and transpose Sylvester matrix equations
- Superposition operator problems of Hölder-Lipschitz spaces
- A note on λ-analogue of Lah numbers and λ-analogue of r-Lah numbers
- Ground state solutions and multiple positive solutions for nonhomogeneous Kirchhoff equation with Berestycki-Lions type conditions
- A note on 1-semi-greedy bases in p-Banach spaces with 0 < p ≤ 1
- Fixed point results for generalized convex orbital Lipschitz operators
- Asymptotic model for the propagation of surface waves on a rotating magnetoelastic half-space
- Multiplicity of k-convex solutions for a singular k-Hessian system
- Poisson C*-algebra derivations in Poisson C*-algebras
- Signal recovery and polynomiographic visualization of modified Noor iteration of operators with property (E)
- Approximations to precisely localized supports of solutions for non-linear parabolic p-Laplacian problems
- Solving nonlinear fractional differential equations by common fixed point results for a pair of (α, Θ)-type contractions in metric spaces
- Pseudo compact almost automorphic solutions to a family of delay differential equations
- Periodic measures of fractional stochastic discrete wave equations with nonlinear noise
- Asymptotic study of a nonlinear elliptic boundary Steklov problem on a nanostructure
- Cramer's rule for a class of coupled Sylvester commutative quaternion matrix equations
- Quantitative estimates for perturbed sampling Kantorovich operators in Orlicz spaces
- Review Articles
- Penalty method for unilateral contact problem with Coulomb's friction in time-fractional derivatives
- Differential sandwich theorems for p-valent analytic functions associated with a generalization of the integral operator
- Special Issue on Development of Fuzzy Sets and Their Extensions - Part II
- Higher-order circular intuitionistic fuzzy time series forecasting methodology: Application of stock change index
- Binary relations applied to the fuzzy substructures of quantales under rough environment
- Algorithm selection model based on fuzzy multi-criteria decision in big data information mining
- A new machine learning approach based on spatial fuzzy data correlation for recognizing sports activities
- Benchmarking the efficiency of distribution warehouses using a four-phase integrated PCA-DEA-improved fuzzy SWARA-CoCoSo model for sustainable distribution
- Special Issue on Application of Fractional Calculus: Mathematical Modeling and Control - Part II
- A study on a type of degenerate poly-Dedekind sums
- Efficient scheme for a category of variable-order optimal control problems based on the sixth-kind Chebyshev polynomials
- Special Issue on Mathematics for Artificial intelligence and Artificial intelligence for Mathematics
- Toward automated hail disaster weather recognition based on spatio-temporal sequence of radar images
- The shortest-path and bee colony optimization algorithms for traffic control at single intersection with NetworkX application
- Neural network quaternion-based controller for port-Hamiltonian system
- Matching ontologies with kernel principle component analysis and evolutionary algorithm
- Survey on machine vision-based intelligent water quality monitoring techniques in water treatment plant: Fish activity behavior recognition-based schemes and applications
- Artificial intelligence-driven tone recognition of Guzheng: A linear prediction approach
- Transformer learning-based neural network algorithms for identification and detection of electronic bullying in social media
- Squirrel search algorithm-support vector machine: Assessing civil engineering budgeting course using an SSA-optimized SVM model
- Special Issue on International E-Conference on Mathematical and Statistical Sciences - Part I
- Some fixed point results on ultrametric spaces endowed with a graph
- On the generalized Mellin integral operators
- On existence and multiplicity of solutions for a biharmonic problem with weights via Ricceri's theorem
- Approximation process of a positive linear operator of hypergeometric type
- On Kantorovich variant of Brass-Stancu operators
- A higher-dimensional categorical perspective on 2-crossed modules
- Special Issue on Some Integral Inequalities, Integral Equations, and Applications - Part I
- On parameterized inequalities for fractional multiplicative integrals
- On inverse source term for heat equation with memory term
- On Fejér-type inequalities for generalized trigonometrically and hyperbolic k-convex functions
- New extensions related to Fejér-type inequalities for GA-convex functions
- Derivation of Hermite-Hadamard-Jensen-Mercer conticrete inequalities for Atangana-Baleanu fractional integrals by means of majorization
- Some Hardy's inequalities on conformable fractional calculus
- The novel quadratic phase Fourier S-transform and associated uncertainty principles in the quaternion setting
- Special Issue on Recent Developments in Fixed-Point Theory and Applications - Part I
- A novel iterative process for numerical reckoning of fixed points via generalized nonlinear mappings with qualitative study
- Some new fixed point theorems of α-partially nonexpansive mappings
- Generalized Yosida inclusion problem involving multi-valued operator with XOR operation
- Periodic and fixed points for mappings in extended b-gauge spaces equipped with a graph
- Convergence of Peaceman-Rachford splitting method with Bregman distance for three-block nonconvex nonseparable optimization
- Topological structure of the solution sets to neutral evolution inclusions driven by measures
- (α, F)-Geraghty-type generalized F-contractions on non-Archimedean fuzzy metric-unlike spaces
-
Solvability of infinite system of integral equations of Hammerstein type in three variables in tempering sequence spaces
- Special Issue on Nonlinear Evolution Equations and Their Applications - Part I
- Fuzzy fractional delay integro-differential equation with the generalized Atangana-Baleanu fractional derivative
- Klein-Gordon potential in characteristic coordinates
- Asymptotic analysis of Leray solution for the incompressible NSE with damping
- Special Issue on Blow-up Phenomena in Nonlinear Equations of Mathematical Physics - Part I
- Long time decay of incompressible convective Brinkman-Forchheimer in L2(ℝ3)
- Numerical solution of general order Emden-Fowler-type Pantograph delay differential equations
- Global smooth solution to the n-dimensional liquid crystal equations with fractional dissipation
- Spectral properties for a system of Dirac equations with nonlinear dependence on the spectral parameter
- A memory-type thermoelastic laminated beam with structural damping and microtemperature effects: Well-posedness and general decay
- The asymptotic behavior for the Navier-Stokes-Voigt-Brinkman-Forchheimer equations with memory and Tresca friction in a thin domain
- Absence of global solutions to wave equations with structural damping and nonlinear memory
- Special Issue on Differential Equations and Numerical Analysis - Part I
- Vanishing viscosity limit for a one-dimensional viscous conservation law in the presence of two noninteracting shocks
- Limiting dynamics for stochastic complex Ginzburg-Landau systems with time-varying delays on unbounded thin domains
- A comparison of two nonconforming finite element methods for linear three-field poroelasticity