Augmented, free and tensor generalized digroups
-
José Gregorio Rodríguez-Nieto


Abstract
The concept of generalized digroup was proposed by Salazar-Díaz, Velásquez and Wills-Toro in their paper “Generalized digroups” as a non trivial extension of groups. In this way, many concepts and results given in the category of groups can be extended in a natural form to the category of generalized digroups. The aim of this paper is to present the construction of the free generalized digroup and study its properties. Although this construction is vastly different from the one given for the case of groups, we will use this concept, the classical construction for groups and the semidirect product to construct the tensor generalized digroup as well as the semidirect product of generalized digroups. Additionally, we give a new structural result for generalized digroups using compatible actions of groups and an equivariant map from a group set to the group corresponding to notions of associative dialgebras and augmented racks.
1 Introduction
The digroup structure is introduced by M. Kinyon [2], R. Felipe [3] and K. Liu [4] as a non trivial extension of the concept of group, with the purpose of giving an answer to the so called Coquecigrue problem which is supposed to provide a generalization of the third Lie theorem for Leibniz algebras, see [5].
A slightly different structure studied in [1] is called generalized digroup. It doesn’t request bilateral inverses for its elements. This concept is corresponding to what is called Digroups1 in [6].
For digroups with bar units that generate bilateral inverses (see [7]) several authors propose different generalizations of the notion of digroup. For instance, in [8], J. D. H. Smith shows that any digroup with bilateral inverses is equivalent to what he calls a (4+2)-diquasigroup (Theorem 10.8). His proof uses digroups generated by two groups that act in a commutative way over a set. This idea is similar to a work developed in [9] which leads to express associative dialgebras in terms of bimodules over associative algebras and equivariant maps.
In addition, in [2], M. Kinyon proves that any digroup generates a rack and it is natural to think that it can be extended to generalized digroups. Since any rack can be generated by a group acting over a set, with the action commuting with the conjugation and an equivariant map, that gives another motivation to explore what we call here augmented generalized digroups, a construction that provides another characterization of generalized digroups.
Due to the fact that augmented racks give set theorical solutions to the quantum Yang-Baxter equation (see [10]), and that augmented generalized digroups can be defined, it is possible to study relations between the Yang-Baxter equations and generalized digroups that could procure solutions. These ideas are being explored by the authors in a work in progress.
Finding free structures is a central problem in abstract algebra. For the case of dimonoids we can find constructions in several works, for example see [6, 8, 11, 12, 13]. The free generalized digroup is exhibited in the present work and it is done following Loday’s ideas for free dimonoids (see [5]).
The semidirect product of groups (see [15]) induces our definition of tensor generalized digroup and its representations. The cyclic generalized digroup and generalized semidirect product result naturally from the discussion involved.
The paper is organized as follows. In Section 2, we review the basic theory and the notions of subdigroup and normality in the sense of [1] and we introduce the definitions of anti-homomorphisms and involutions over generalized digroups.
We finish Section 2 with the relation of generalized digroups with associative dialgebras and racks, we define augmented generalized digroups, and we also show that each generalized digroup can be expressed in such a way.
Section 3 is dedicated to study the construction of the free generalized digroup and to show some properties of this new structure.
In the last section, we introduce the notions of generalized tensor digroups and generating sets and we finish with the concept of the semidirect product of generalized digroups.
2 Some results about Generalized Digroups
In this section we briefly recall some definitions and results about generalized digroups, for a deeper study see [1]. We also review some properties and we introduce the notion of anti-homomorphism and involution for this structure. Finally we introduce the notion of augmented generalized digroups.
2.1 General results
We summon up the definition, some basic properties and a way to look up generalized digroups.
Definition 1
A set D is a generalized digroup if it has two binary associative operations ⊢ and ⊣ over D, such that they satisfy the following conditions:
x ⊢ (y ⊣ z) = (x ⊢ y) ⊣ z
x ⊣ (y ⊣ z) = x ⊣ (y ⊢ z) and (x ⊢ y) ⊢ z = (x ⊣ y) ⊢ z
There exists (at least) an element e in D, such that for all x in D, x ⊣ e = x = e ⊢ x.
For a fixed, but otherwise arbitrary, bar-unit e, we have that for each x in D there exist
It is clear that a group (G, ⋅) can be seen as a generalized digroup by considering ⊢= ⋅ =⊣.
The elements that satisfy condition 3. are called bar-units and the set of them, denoted by E, is called the halo of D. For any bar-unit ξ ∈ E, we denote the sets of left and right inverses with respect to ξ by
A generalized digroup that consists only of bar units or that is a group is called a trivial generalized digroup, here we exhibit a non trivial generalized digroup.
Example 1
Let (D, ⊢, ⊣) be a generalized digroup defined by
For this generalized digroup we have that the halo is E = {x0, x1}
Among many basic properties that are proved in [1], we state a couple of them that are being used later.
Proposition 1
Let D be a generalized digroup and let e be a fixed bar unit.
For a given x ∈ D, we have that
For x, y in D, the inverses of the products are
It is easy to see that the halo also corresponds to any of the following sets
Since the proof of the following theorem comes from the results given in [1], we omit it.
Theorem 1
Let (D, ⊢, ⊣) be a generalized digroup. For any ξ ∈ E, (
ξ⊣ D =
As it is shown in [1] a characterization of D is given below
In order to describe another way of looking at a generalized digroup let’s recall that if D and D′ are generalized digroups, a map ϕ : D → D′ is a generalized digroup homomorphism if for any x, y ∈ D
In addition, if ϕ is a bijection, then ϕ is a generalized isomorphism and D is isomorphic to D′.
Theorem 2
Let D be a generalized digroup and let E be the set of bar units. For any e ∈ E, we have that E is a
Moreover,
The second characterization of generalized digroups is an extension of the results of M. Kinyon (see [2]) and F. Ongay (see [16]).
Theorem 3
Let D, E and
That is, a generalized digroup can be seen as a cartesian product between a G-set E and the group G, with set of bar units {e} × E. With respect to such decomposition of a generalized digroup, next theorem describes a generalized digroup homomorphism.
Theorem 4
Let Ψ : D ⟶ D′ be a generalized digroup homomorphism. Then, there exists an unique homomorphism Ψ′ :
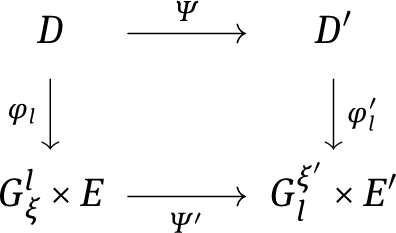
commutes, where Ψ′ ≡ (φ, μ), with
the map φ :
the map μ : E ⟶ E′, defined as μ(α) = Ψ(α) is an equivariant map, i.e.
for all α ∈ E, all x ∈ D and all a ∈
Now we extend the notion of anti-homomorphism and involution, known in group theory, for generalized digroups.
Definition 2
A map ψ : D → D′ is called a generalized digroup anti-homomorphism if for any x, y ∈ D,
An anti-homomorphism x ↦ x* from a digroup to itself is called an involution if it is its own inverse, i.e. (x*)* = x, for all x ∈ D.
A similar result as Theorem 4 can be stated for generalized digroup anti-homomorphisms, we only have to check that the corresponding function Ψ′ = (ϕ, μ) is in fact an anti-homomorphism.
Some basic properties about involution are given in the following proposition.
Proposition 2
Let D be a generalized digroup and let * be an involution over D.
For any e ∈ E, e* is a bar unit and therefore E = E*.
Given x ∈ D and e ∈ E, we have that
The next example shows that we don’t always have the equality e* = e.
Example 2
Let G be the group of all the Möbius transformations of the form z ↦ eiθz acting on the unit circle S1. Then the set D = G × S1 can be endowed as a generalized digroup by considering the products
Now, we consider the involution * : D → D defined by (g, z)* = (g–1, –z). As we can see, the halo of D is {id} × S1. And so, for every z ∈ S–1, (id, z)* = (id, –z) ≠ (id, z).
We recall the concept of a generalized subdigroup of a generalized digroup D, denoted by S ≤ D, a subset, such that with the products in D restricted to it, is a generalized digroup. It is proven in [1], section 3., that S must satisfy that there are two subsets Γ and Δ of it such that Δ is Γ-invariant respect to the action defined in Theorem 2, i.e. Γ ∙ Δ = Δ.
It is also useful to bring back the definition of normality, where for a generalized digroup (D; ⊢, ⊣) and a subdigroup N, the latter is a normal generalized subdigroup of D, denoted by N ⊴ D, if x ⊢ N = N ⊣ x, for any x ∈ D. Moreover, we have that
Lemma 1
Let D be a generalized digroup and let N be a generalized subdigroup of D. Then N ⊴ D iff there exist a normal subgroup Γ of G and a set Δ ⊆ E such that N ≅ Γ × Δ and G ∙ Δ = Δ.
2.2 Augmented generalized digroups
This subsection is dedicated to the new characterizacion of generalized digroups mentioned in the introduction.
In the proposition we show that any generalized digroup is equivalent to a generalized digroup generated by compatible actions and an equivariant map. We call the structure that satisfies the hypothesis an augmented generalized digroup and we denote it by (G, X, λ, ρ, π).
Proposition 3
Let G be a group, with unit 1G, and let X be a G-set under the left and rigth compatible actions λ and ρ, i.e. λg commutes with ρh, for any g, h ∈ G. If there is an equivariant map π : X → G with respect to both actions such that π(X) generates G, then (X, ⊢, ⊣) is a generalized digroup with the operations
In this case, E = {x * y | π(x) ⋅ π(y) = 1G}, where * represents either ⊢ or ⊣.
Proof
The products ⊢ and ⊣ are associative because λ and ρ are actions. From the compatibility of the actions, condition 1 in the definition of generalized digroup follows. The equivariance of π, with respect to the actions λ and ρ, implies that
and therefore (x ⊢ y) ⊢ z = (x ⊣ y) ⊢ z, for all x, y, z ∈ X.
Similarly, x ⊣ (y ⊣ z) = x ⊣ (y ⊢ z), for all x, y, z ∈ X; and condition 2 is satisfied.
Because π(X) generates G, there are x, y ∈ X such that π(x) ⋅ π(y) = 1G, and therefore E ≠ ∅. Since π(ξ) = 1G, then ξ is a bar unit and we have that E is the halo of X. Indeed, if π(x) ⋅ π(y) = 1G, then
and
The proof for x ⊣ y is analogous.
To get the inverses, let’s assume that z is the inverse of w with respect to ξ = x ⊢ y, then w ⊣ z = x ⊢ y, this is, w ∙ρ π(z) = π(x) ∙λ y and so (w ∙ρ π(z)) ∙ρ π(z)–1 = (π(x) ∙λ y) ∙ρ π(z)–1. Thus, w = π(x)∙λ y ∙ρ (π(z))–1.
In a similar way, we get the expressions for the inverses with respect to the bar units ξ, η ∈ E, with ξ = x ⊢ y and η = x ⊣ y:
□
We show that any generalized digroup can be seen as in the previous proposition. Using that
Theorem 5
Let D be a generalized digroup. There exist a group G, two compatible actions over D, λ and ρ, and an equivariant map π : D → G such that D can be seen as an augmented generalized digroup (G, D, λ, ρ, π).
Proof
Given the factorization of a generalized digroup in terms of the set E and the group
If we define the maps λ : G × D → D and ρ : D × G → D by
we have that λ and ρ are compatible actions from G on D by identities 1. and 2. in Definition 1.
Finally, the projection map π : D → G, defined by π(x) = [x], is an equivariant map with respect to both actions and π(D) generates G. It’s easy to see for any x, y ∈ D that
□
Now we are going to show some basic properties respect to augmented generalized digroups.
In Theorem 4, for any generalized digroup homomorphism Ψ : D → D′, the map
Because x ⊢ E = E ⊣ x and
Moreover, this digroup homomorphism satisfies
for all x, y ∈ D. From these considerations we obtain the following result.
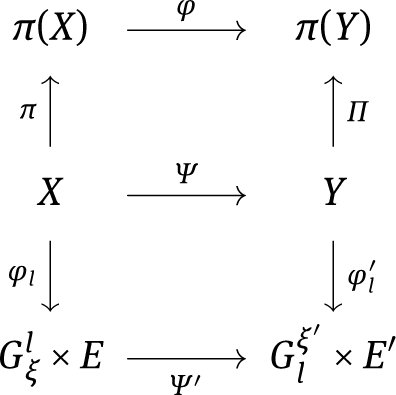
Theorem 6
Let D, D′ be generalized digroups and Ψ : D ⟶ D′ be a generalized digroup homomorphism. If (G, D, λ, ρ, π) and (G′, D′, λ′, ρ′, π′) are the augmented generalized digroups obtained in Theorem 5, for D and D′, respectively, then there is a group homomorphism ς : G → G′ such that for all x ∈ D and all g ∈ G,
The homomorphism Ψ is ς-equivariant with respect to the left action λ and to the right action ρ i.e.
The homomorphism ς is equivariant with respect to the maps π and π′, i.e. ς(π(x)) = π′(Ψ(x)).
The previous result induces the following definition
Definition 3
Let (G, X, λ, ρ, π) and (H, Y, τ, ϱ, Π) be augmented generalized digroups. A pair (φ, Ψ), where φ : π(X) → Π(Y) and Ψ : X → Y are maps, is called an augmented generalized digroup homomorphism if
The map φ induces a group homomorphism φ̂ : G → H.
The map φ is Ψ-equivariant with respect to the maps π and Π, i.e. φ(π(x)) = Π(Ψ(x)), for all x ∈ X.
The map Ψ is φ-equivariant with respect to the group actions λ, ρ, τ, ϱ and the maps π, Π, i.e. for all x, y ∈ X, Ψ (π(x) ∙λ y) = φ(π(x)) ∙τ Ψ(y) and Ψ(x ∙ρ π(y)) = Ψ(x) ∙ϱ φ(π(y)).
Lemma 2
Let (G, X, λ, ρ, π) and (H, Y, τ, ϱ, Π) be augmented generalized digroups. If Ψ : X → Y is a generalized digroup homomorphism, then there is a map φ : π(X) → Π(Y), such that (φ, Ψ) is an augmented generalized digroup homomorphism.
Proof
Let φ : π(X) → Π(Y) be a map defined by φ(π(x)) := Π(Ψ(x)), for all x ∈ X. From the digroup axioms and generalized digroup homomorphism characterization (see Theorem 4) it follows that (φ, Ψ) is an augmented generalized digroup homomorphism, G ≅
□
We finish this section reviewing the characterization of digroups given by J. D. H. Smith in [8], section 10, via diquasigroup algebras (see Proposition 10.5, Corollary 10.7 and Theorem 10.8). J. D. H. Smith uses a digroup generated by two groups with compatible actions over a same set and a fixed element with respect to both actions. For generalized digroups we don’t assume the existence of a fixed point.
Let (G, 1G) and (H, 1H) be groups, and let X be a left G-set and a rigth H-set, where the left G-action λ and the right H-action ρ commute. Then (G × X × H, ⊣, ⊢), with binary maps ⊣ and ⊢ defined by
and
for all g1, g2 ∈ G, x1, x2 ∈ X and h1, h2 ∈ H, is a generalized digroup.
The halo is E = {1G} × X × {1H} ≅ X, and for any (g, x, h) ∈ G × X × H the inverses with respect to the bar unit (1G, z, 1H) are:
Therefore the groups of inverses are isomorphic to the direct product G × H.
The actions λ and ρ induce a left action λ̂ and a right action ρ̂, from G × H on the set G × X × H by
and
The projection map π̂, given by (g, x, h) ↦ (g, h), is equivariant with respect to the actions λ̂ and ρ̂.
With these actions and the projection map, we have that (G × X × H, ⊣, ⊢) is a generalized digroup generated by the actions λ̂ and ρ̂, and the surjective equivariant map π̂, i.e. (G × X × H, ⊣, ⊢) is an augmented generalized digroup.
J. D. H. Smith uses Kinyon’s results to prove Theorem 10.8. Now we give a simple, direct and independent proof of this result for generalized digroup.
Let (D, ⊢, ⊣) be a generalized digroup, since for any ξ ∈ E, we have that for the isomorphic groups
3 The free generalized digroup
In [5] J.-L. Loday constructs the free dimonoid. Later, using a free semigroup FS[X] and the word lenght map A. V. Zhuchok in [11] constructs another free dimonoid which is isomorphic to the one defined by J. -L. Loday. Both dimonoids don’t extend to digroups since A. V. Zhuchok in [12], Theorem 4, p. 833, shows that it’s impossible to adjoin a set of bar units (halo) to a Loday’s free dimonoid. In this section, we exhibit the free generalized digroup FD(X) for any set X. The basic ideas in the construction are related to the articles [1, 9, 7], and the book Dialgebras and related operads (see [14]).
In addition we present several properties of FD(X) and relate it with the characterization theorems and augmented generalized digroups.
For the construction of free generalized digroup we use classical results for free structures (see [17]).
Let X be a set and F(X) the free group generated by X, that is, the set of all words in X±, see [15] for details on this definition. The proof of the following statement is straightforward and therefore we omit it. However, the result is central in this section.
Proposition 4
Let FD(X) := F(X) × X × F(X) with the binary maps ⊣ and ⊢ defined for all x, y ∈ X and u, v, a, b ∈ F(X) by
Then (FD(X), ⊣, ⊢) is a generalized digroup with halo
and inverses with respect to the bar unit (v, y, b)
and
where the empty word e is the unit of the free group F(X) and w–1 is the inverse of w in F(X).
Remark 1
The inverses
We want to show now that FD(X) is the free generalized digroup in X, i.e. it’s the free element in the generalized digroup category. First, note that the natural immersion X ↪ FD(X) is given by x ↦ (e, x, e).
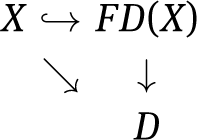
Theorem 7
(Universal property) Let D be a generalized digroup and let X be a set. For each function f : X → D, there exists a homomorphism Ψ : FD(X) → D that extends f, that is, such that the following diagram commutes.
Proof
Let E be the halo of D and ξ ∈ E fixed. For any x ∈ X there is a bar unit η ∈ E such that f(x) ∈
Since
Then φ : F(X) →
Now, we define Ψ : FD(X) → D by Ψ((u, x, a)) = φ(u) ⊢ f(x) ⊣ φ(a), for all (u, x, a) ∈ FD(X). The map Ψ is a homomorphism. Indeed,
and
Similarly,
and
□
Definition 4
The generalized digroup FD(X) is called the free generalized digroup on X.
The bar units and the inverses in the free generalized digroup have the following properties
Remark 2
For FD(X) we have that
If y ∈ X and v ∈ F(X) then
Similarly, Ψ((b–1y–1, y, b)) = (f(y) ⊣ φ(b))–1 ⊢ (f(y) ⊣ φ(b)) ∈ E. Therefore, Ψ(E(X)) ⊆ E.
For (v, y, b) ∈ E(X), we have that Ψ((v, y, b)) = ξ ∈ E iff f(y) ∈
For an element (u, x, a) ∈ FD(X),
Similarly,
We want to describe the sets in Definition 6 from [1] for the generalized digroup FD(X).
Proposition 5
For any bar unit (v, y, b) ∈ E(X), the group of left inverses
Proof
Since
then let’s define ϕ :
Remark 3
According to the previous result, we can see that
We describe now some actions from the group F(X) to the free generalized digroup FD(X).
First, we define the maps
and γ : F(X) × FD(X) → FD(X) the conjugate composition of λ and ρ, i.e
From these definitions it is simple to see that
Theorem 8
The free generalized digroup FD(X) is a F(X)-set with respect to the actions λ, ρ and γ. Besides, λ and ρ are compatible.
After defining the action γ, we can see how it works out with the function Ψ, say,
Thus, we can conclude
Lemma 3
The map Ψ is φ-equivariant with respect to the actions λ, ρ and γ.
Now, given a projection map Π : FD(X) → F(X) defined by (u, x, a) ↦ uxa, we have that Π is surjective and equivariant with respect to the actions λ and ρ. Moreover, for all (u, x, a), (v, y, b) ∈ FD(X),
and therefore
Theorem 9
The augmented generalized digroup (F(X), FD(X), λ, ρ, Π) is the free generalized digroup FD(X).
Going back to the units of the free generalized digroup, we classify them in two groups. For that, note that elements of the form (e, z, z–1) and (z–1, z, e) are bar units.
We denote by ξwz the bar unit (w, z, (wz)–1) and by ξzc the bar unit ((zc)–1, z, c). Thus ξez = (e, z, z–1) and ξze = (z–1, z, e).
Definition 5
The bar units of FD(X) of the form either (e, z, z–1) or (z–1, z, e) are called basic bar units of the generalized digroup. We define the sets
It is simple to see that X,
Remark 4
Note that
Using the characterization of the bar units, we can express the inverses in terms of it.
If we denote
Lemma 4
For a, u, w ∈ F(X) and x, z ∈ X,
and
For the halo E(X), we consider the following notation El(X) = {(w, z, (wz)−1) | z ∈ X and w ∈ F(X)} and Er(X) = {((zc)−1, z, c) | z ∈ X and c ∈ F(X)}.
Lemma 5
If in the free generalized digroup FD(X) we denote the action γ by ⋅, we can see that
F(X) ⋅
F(X) ⋅
F(X) ⋅ E(X) = E(X), i.e. E(X) is invariant under the action γ.
We review involutions in free generalized digroups.
Proposition 6
Let’s consider the map * : FD(X) → FD(X), with (u, x, a) ↦ (u, x, a)* = (aι, x, uι), where ι : F(X) → F(X) is the function such that
Then * is an involution.
Proof
It is clear that ((u, x, a)*)* = (u, x, a). Moreover, since zι = z, for any z ∈ X±, then
and
□
If we consider the group action η of F(X) on FD(X), defined by w ∙η (u, x, a) = (wu, x, awι), we have that η is invariant under the involution * since
Moreover, because Π ((u, x, a)*) = (aι xuι) = (Π(u, x, a))ι, then Π ∘ * = ι ∘ Π
Remark 5
For the sets
As we have in subsection 2.1, every involution * defined on a generalized digroup G × E can be projected to a group involution ι : G → G. In the following theorem we describe a way to extend a group involution on F(X) to an involution on FD(X). Its proof comes directly from calculations, then we omit it.
Theorem 10
Let ι : F(X) → F(X) be a involution over the free group generated by a set X. The involution ι can be extended to an involution * : FD(X) → FD(X), by (u, x, a)* := (aι, xι, uι) if and only if xι ∈ X, for all x ∈ X.
4 The tensor generalized digroup
In this section we use the construction of the semidirect product of groups given in [15] in order to define the tensor generalized digroup and the concept of generating set for a generalized digroup. It is a surprise to prove that the same construction of the semidirect product of groups works for generalized digroups.
It is well known that if G is a group, and ϕ : G → Aut(G’) is a representation of G, with ϕg = ϕ(g), then G × G’ can be endowed with group structure as follows
This product is called, in the literature, the semidirect product of G and G’ and it is denoted by G ⋊ϕ G’. As we see above, G ⋊ϕ G’ can also be considered as a generalized digroup by taking
This form of constructing generalized digroups from group structures is called the trivial form.
The following theorem gives us a non trivial form to provide the semidirect product G ⋊ϕ G with generalized digroup structure. At the end of this section we use this idea to define the tensor generalized digroups.
Theorem 11
Let G be a group. Then, the group G ⋊ϕ G is a generalized digroup with the following operations
and
Since the binary operations ⊢ and ⊣ do not depend on the representation ϕ, we use the notation G ⊗ G to refer to G ⋊ϕ G as a generalized digroup in a nontrivial form and u ⊗ v instead of (u, v).
Proof
The proof that ⊢ and ⊣ are associative binary operations is taken from direct calculations. Now, we verify the condition given in the Definition 5 of [1]. In fact, let u1 ⊗ u2, v1 ⊗ v2 and w1 ⊗ w2 in G ⊗ G, then
Besides,
and
It is not hard to verify that the set of bar units of G ⊗ G, i.e., the halo of G ⊗ G, is E = {u1 ⊗ u2 | u1 u2 = 1}.
For ξ = u ⊗ u−1 ∈ E and u1 ⊗ u2 ∈ G ⊗ G, we have that
and
Therefore,
Moreover,
and
□
Definition 6
The generalized digroup in the theorem is called the tensor generalized digroup of G.
Note that if in the previous theorem we define, for every u ∈ G, the bijection φu : G → G, as φu(v) = uv, then we can rewrite the equations (2) and (3) as follows
and
Let us consider the following interesting fact. If G is obtained by the quotient of the free group F(X) by the relations Ri(X) = e, i = 1, 2, …, k, then the tensor generalized digroup G ⊗ G can be described, in an informal way, as the quotient of the tensor generalized digroup F(X) ⊗ F(X) by the relations Ri(X) ⊗ Rj(X) = e ⊗ e, i, j = 1, 2, …, k, like in the case of group presentations, see [15] for more details.
Consider the following definition.
Definition 7
For the free generalized digroup FD(X), we define the fiber of FD(X) at the distinguished element y of X as the subset Fy(X) = F(X) × {y} × F(X) of FD(X).
Proposition 7
The subset Fy(X) is a normal generalized subdigroup of FD(X). Moreover, it is isomorphic to F(X) ⊗ F(X).
Proof
The proof that ⊢ and ⊣ are associative binary operations on Fy(X) comes from direct calculations. Besides, the bar units of Fy(X) must be of the form (b−1 y−1, y, b) or (v, y, y−1v−1), i.e. (v, y, b) such that vyb is the empty word, and so they belong to Fy(X). We end the proof that Fy(X) is a generalized subdigroup noting that for every bar unit (v, y, b),
and
The normality of Fy(X) is taken directly from the following fact. For every (s, y, d) ∈ Fy(X) and all (u, x, a), (w, z, c) in FD(X), we have that:
In fact, Fy(X) satisfies a stronger condition than normality.
Now, let φy : Fy(X) → F(X) ⊗ F(X) be the function defined by
Since,
and
the map φy is a generalized digroup homomorphism.
Consider the function ϕy : F(X) ⊗ F(X)→ Fy(X) given by ϕy(u ⊗ a) = (uy−1, y, a). It is not hard to see that this function is a generalized digroup homomorphism, and that ϕy is the inverse function of φy. □
Let X be a non empty set and let X⊗ be the set of all tensors of the form xϵ ⊗ 1, with x ∈ X and ϵ ∈ {1, −1}. Here, 1 means that there is nothing in the corresponding position, so it acts as the identity in the free group F(X).
Let u ⊗ v ∈ F(X) ⊗ F(X), with
The previous calculation motivates the following proposition.
Proposition 8
(Generating set). Let X be a subset of a generalized digroup (D, ⊢, ⊣). For X− we mean the set of all inverses, right and left, with respect to all bar units in D. In other words, if E denotes the halo of D, then
Thus the set 〈X〉 of all elements of D of the form
where gt, hn and y are in X± =
Proof
In order to simplify the notation we use u ⊢ y ⊣ v, with u = g1 ⊢ ⋯ ⊢ gp and v = h1 ⊣ ⋯ ⊣ hk to represent the elements of 〈X〉.
Since
and
⊢ and ⊣ define binary operations on 〈X〉.
Besides, due to the fact that for every bar unit ξ in D, ξ can be represented as
for every x, y ∈ X, the set 〈X〉 contains the halo of D.
Let ξ =
Again, from Proposition 1, we have that
If there exists i, such that
The same conclusion is obtained for the case
In a similar way, from Proposition 1, we have that
And, we also prove that
Definition 8
The subdigroup 〈X〉 is called the generalized subdigroup generated by X. In the case that 〈X〉 = D, we say that D is generated by X and if X has one element, then D is called a cyclic generalized digroup.
As a consequence, X⊗ is a generating set of F(X) ⊗ F(X). This fact is not surprising because F(X) ⊗ F(X) is a subdigroup of FD(X) and FD(X) is free on X.
Now, we continue with the construction of the semidirect product of generalized digroups, but first we consider
Definition 9
Let (D, ⊢, ⊣) and (D′, ⊢′, ⊣′) be two generalized digroups. We define Aut(D) as the set of all bijective generalized digroup homomorphisms from D onto itself.
A representation of D′ on D is a function φ : D′ → Aut(D), with φ(u′) = φu′, such that, for every u′, v′ in D′ and every w ∈ D,
and
Note that if, in the previous definition, we make ⊣=⊢ and D′ is a group with the operation ⊢, then φ is a group representation in the usual sense. Another important fact is that for every u′ ∈ D′,
Let ξ′ be a bar unit of D′ and let φ be a representation of D′ on D, then for every u′ ∈ D we have that
Therefore,
Proposition 9
If f ∈ Aut(D), then f(E) ⊂ E, where E is the halo of D. Moreover, for every u ∈ D and every f ∈ Aut(D),
and
Proof
Let ξ be a bar unit of D and f ∈ Aut(D). Since for all u ∈ D there exists v ∈ D such that u = f(v), we have that
and
thus, f(ξ) is in the halo of D.
Besides, let v =
Since f(ξ) is also a bar unit of D, then v is a right inverse of f(u) with respect to f(ξ). In other words,
Following a similar argument, we prove (9). □
Theorem 12
Let (D, ⊢, ⊣) and (D′, ⊢′, ⊣′) be two generalized digroups and let φ be a representation from D′ into Aut(D), then D × D′ with the binary operations
and
is a generalized digroup denoted D ⋊φ D′.
Moreover, for every bar unit ξ′ of D′, the subset D × {ξ′} is a normal generalized subdigroup of D ⋊φ D′. If E denotes the halo of D, then E × D′ is a generalized subdigroup of D ⋊φ D′.
Proof
Let
The associativity of ◃ comes in a similar way. Now, we verify the conditions given in the Definition 5 of [1]. In fact,
We also have that,
We end this part of the proof with the following,
From (7) and a direct calculation, the bar units on D ⋊φ D′ are of the form (ξ, ξ′), where ξ and ξ′ are bar units in D and D′, respectively.
For a bar unit ξ̂ = (ξ, ξ′) ∈ D ⋊φ D′ and (u, u′) ∈ D ⋊φ D′, we have from (8) that
In fact,
Besides, since
then
Therefore,
The last equality is true because
In order to simplify the notation, we use Dξ′ = D × {ξ′}. Let ξ be a bar unit in D and let (v, {ξ′) ∈ Dξ′ and (u, u′) in D ⋊φ D′, then
Let
It is clear that w(u, u′, v) ∈ D. On the other hand, since
then (u, u′) ▹ (v, ξ′) ◃
For the last part we consider Proposition 9. Let ξ, η ∈ E, due to the fact that
and
we conclude that E × D′ is a generalized subdigroup of D ⋊φ D′. □
Definition 10
The digroup defined is the generalized semidirect product of D and D′ with respect to φ.
We end this section with the construction of D ⊗ D, for the case in which (D, ⊢, ⊣) is a generalized digroup. We just need to consider the binary operations
and
It is not hard to prove that the halo of D ⊗ D is the set
Besides, if ξ ⊗ ξ̂ ∈ E(D ⊗ D) and v1 ⊗ v1 ∈ D ⊗ D, then
and
Dedicated to Ivan Shestakov’s 70th birthday
Communicated by: Mohamed Elhamdadi
References
[1] Salazar-Díaz O. P., Velásquez R., Wills-Toro L. A., Generalized digroups, Comm. Algebra, 2016, 44:7, 2760–278510.1080/00927872.2015.1065841Suche in Google Scholar
[2] Kinyon M. K., Leibniz algebras, Lie racks, and digroups, J. Lie Theory, 2007, 17:1, 99–114Suche in Google Scholar
[3] Felipe R., Digroups and their linear presentations, East-West J. Math., 2006, 8:1, 27–48Suche in Google Scholar
[4] Liu K., A class of group-like objects, arXiv:math/0311396v1 [math.RA]Suche in Google Scholar
[5] Loday J.-L., Dialgebras, In: Dialgebras and Related Operads, Lecture Notes in Math., 1763, Springer, Berlin, 2001, 7–6610.1007/3-540-45328-8_2Suche in Google Scholar
[6] Zhuchok A., Zhuchok Y., On two classes of digroups, São Paulo J. Math. Sci., 2017, 11:1, 240–25210.1007/s40863-016-0038-4Suche in Google Scholar
[7] Ongay F., Velásquez R., Wills-Toro L. A., Normal subdigroups and the isomorphism theorems for digroups, Algebra Discrete Math., 2016, 22:2, 262–283Suche in Google Scholar
[8] Smith J. D. H., Directional algebras, Houston J. Math., 2016, 42:1, 1–22Suche in Google Scholar
[9] Salazar-Díaz O. P., Velásquez R., Wills-Toro L. A., Construction of dialgebras through bimodules over algebras, Linear Multilinear Algebra, 2016, 64:10, 1980–200110.1080/03081087.2015.1134428Suche in Google Scholar
[10] Soloviev A., Non-unitary set-theoretical solutions to the quantum Yang-Baxter equation, Math. Res. Lett., 2000, 7:5-6, 577–59610.4310/MRL.2000.v7.n5.a4Suche in Google Scholar
[11] Zhuchok A. V., Free dimonoids, Ukrainian Math. J., 2011, 63:2, 196–20810.1007/s11253-011-0498-8Suche in Google Scholar
[12] Zhuchok A. V., Diamonds and bar-units, Sibirsk. Mat. Zh., 2015, 56:5, 1034–104910.1134/S0037446615050055Suche in Google Scholar
[13] Zhuchok A. V., Dimonoids, Algebra Logika, 2011, 50:4, 71–496, 554–555, 55710.1007/s10469-011-9144-7Suche in Google Scholar
[14] Loday J.-L., Frabetti A., Chapoton F., Goichot F., Dialgebras and related operads, vol. 1763 of Lecture Notes in Mathematics, Springer-Verlag, Berlin, 200110.1007/b80864Suche in Google Scholar
[15] Johnson D. L., Presentations of groups, second ed., vol. 15 of London Mathematical Society Student Texts, Cambridge University Press, Cambridge, 1997Suche in Google Scholar
[16] Ongay F., On the notion of digroup, available at http://www.cimat.mx/reportes/enlinea/I-10-04.pdfSuche in Google Scholar
[17] Burris S., Sankappanavar H. P., A course in universal algebra, vol. 78 of Graduate Texts in Mathematics, Springer-Verlag, New York-Berlin, 198110.1007/978-1-4613-8130-3Suche in Google Scholar
© 2019 Rodríguez-Nieto et al., published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 Public License.
Artikel in diesem Heft
- Regular Articles
- On the Gevrey ultradifferentiability of weak solutions of an abstract evolution equation with a scalar type spectral operator of orders less than one
- Centralizers of automorphisms permuting free generators
- Extreme points and support points of conformal mappings
- Arithmetical properties of double Möbius-Bernoulli numbers
- The product of quasi-ideal refined generalised quasi-adequate transversals
- Characterizations of the Solution Sets of Generalized Convex Fuzzy Optimization Problem
- Augmented, free and tensor generalized digroups
- Time-dependent attractor of wave equations with nonlinear damping and linear memory
- A new smoothing method for solving nonlinear complementarity problems
- Almost periodic solution of a discrete competitive system with delays and feedback controls
- On a problem of Hasse and Ramachandra
- Hopf bifurcation and stability in a Beddington-DeAngelis predator-prey model with stage structure for predator and time delay incorporating prey refuge
- A note on the formulas for the Drazin inverse of the sum of two matrices
- Completeness theorem for probability models with finitely many valued measure
- Periodic solution for ϕ-Laplacian neutral differential equation
- Asymptotic orbital shadowing property for diffeomorphisms
- Modular equations of a continued fraction of order six
- Solutions with concentration and cavitation to the Riemann problem for the isentropic relativistic Euler system for the extended Chaplygin gas
- Stability Problems and Analytical Integration for the Clebsch’s System
- Topological Indices of Para-line Graphs of V-Phenylenic Nanostructures
- On split Lie color triple systems
- Triangular Surface Patch Based on Bivariate Meyer-König-Zeller Operator
- Generators for maximal subgroups of Conway group Co1
- Positivity preserving operator splitting nonstandard finite difference methods for SEIR reaction diffusion model
- Characterizations of Convex spaces and Anti-matroids via Derived Operators
- On Partitions and Arf Semigroups
- Arithmetic properties for Andrews’ (48,6)- and (48,18)-singular overpartitions
- A concise proof to the spectral and nuclear norm bounds through tensor partitions
- A categorical approach to abstract convex spaces and interval spaces
- Dynamics of two-species delayed competitive stage-structured model described by differential-difference equations
- Parity results for broken 11-diamond partitions
- A new fourth power mean of two-term exponential sums
- The new operations on complete ideals
- Soft covering based rough graphs and corresponding decision making
- Complete convergence for arrays of ratios of order statistics
- Sufficient and necessary conditions of convergence for ρ͠ mixing random variables
- Attractors of dynamical systems in locally compact spaces
- Random attractors for stochastic retarded strongly damped wave equations with additive noise on bounded domains
- Statistical approximation properties of λ-Bernstein operators based on q-integers
- An investigation of fractional Bagley-Torvik equation
- Pentavalent arc-transitive Cayley graphs on Frobenius groups with soluble vertex stabilizer
- On the hybrid power mean of two kind different trigonometric sums
- Embedding of Supplementary Results in Strong EMT Valuations and Strength
- On Diophantine approximation by unlike powers of primes
- A General Version of the Nullstellensatz for Arbitrary Fields
- A new representation of α-openness, α-continuity, α-irresoluteness, and α-compactness in L-fuzzy pretopological spaces
- Random Polygons and Estimations of π
- The optimal pebbling of spindle graphs
- MBJ-neutrosophic ideals of BCK/BCI-algebras
- A note on the structure of a finite group G having a subgroup H maximal in 〈H, Hg〉
- A fuzzy multi-objective linear programming with interval-typed triangular fuzzy numbers
- Variational-like inequalities for n-dimensional fuzzy-vector-valued functions and fuzzy optimization
- Stability property of the prey free equilibrium point
- Rayleigh-Ritz Majorization Error Bounds for the Linear Response Eigenvalue Problem
- Hyper-Wiener indices of polyphenyl chains and polyphenyl spiders
- Razumikhin-type theorem on time-changed stochastic functional differential equations with Markovian switching
- Fixed Points of Meromorphic Functions and Their Higher Order Differences and Shifts
- Properties and Inference for a New Class of Generalized Rayleigh Distributions with an Application
- Nonfragile observer-based guaranteed cost finite-time control of discrete-time positive impulsive switched systems
- Empirical likelihood confidence regions of the parameters in a partially single-index varying-coefficient model
- Algebraic loop structures on algebra comultiplications
- Two weight estimates for a class of (p, q) type sublinear operators and their commutators
- Dynamic of a nonautonomous two-species impulsive competitive system with infinite delays
- 2-closures of primitive permutation groups of holomorph type
- Monotonicity properties and inequalities related to generalized Grötzsch ring functions
- Variation inequalities related to Schrödinger operators on weighted Morrey spaces
- Research on cooperation strategy between government and green supply chain based on differential game
- Extinction of a two species competitive stage-structured system with the effect of toxic substance and harvesting
- *-Ricci soliton on (κ, μ)′-almost Kenmotsu manifolds
- Some improved bounds on two energy-like invariants of some derived graphs
- Pricing under dynamic risk measures
- Finite groups with star-free noncyclic graphs
- A degree approach to relationship among fuzzy convex structures, fuzzy closure systems and fuzzy Alexandrov topologies
- S-shaped connected component of radial positive solutions for a prescribed mean curvature problem in an annular domain
- On Diophantine equations involving Lucas sequences
- A new way to represent functions as series
- Stability and Hopf bifurcation periodic orbits in delay coupled Lotka-Volterra ring system
- Some remarks on a pair of seemingly unrelated regression models
- Lyapunov stable homoclinic classes for smooth vector fields
- Stabilizers in EQ-algebras
- The properties of solutions for several types of Painlevé equations concerning fixed-points, zeros and poles
- Spectrum perturbations of compact operators in a Banach space
- The non-commuting graph of a non-central hypergroup
- Lie symmetry analysis and conservation law for the equation arising from higher order Broer-Kaup equation
- Positive solutions of the discrete Dirichlet problem involving the mean curvature operator
- Dislocated quasi cone b-metric space over Banach algebra and contraction principles with application to functional equations
- On the Gevrey ultradifferentiability of weak solutions of an abstract evolution equation with a scalar type spectral operator on the open semi-axis
- Differential polynomials of L-functions with truncated shared values
- Exclusion sets in the S-type eigenvalue localization sets for tensors
- Continuous linear operators on Orlicz-Bochner spaces
- Non-trivial solutions for Schrödinger-Poisson systems involving critical nonlocal term and potential vanishing at infinity
- Characterizations of Benson proper efficiency of set-valued optimization in real linear spaces
- A quantitative obstruction to collapsing surfaces
- Dynamic behaviors of a Lotka-Volterra type predator-prey system with Allee effect on the predator species and density dependent birth rate on the prey species
- Coexistence for a kind of stochastic three-species competitive models
- Algebraic and qualitative remarks about the family yy′ = (αxm+k–1 + βxm–k–1)y + γx2m–2k–1
- On the two-term exponential sums and character sums of polynomials
- F-biharmonic maps into general Riemannian manifolds
- Embeddings of harmonic mixed norm spaces on smoothly bounded domains in ℝn
- Asymptotic behavior for non-autonomous stochastic plate equation on unbounded domains
- Power graphs and exchange property for resolving sets
- On nearly Hurewicz spaces
- Least eigenvalue of the connected graphs whose complements are cacti
- Determinants of two kinds of matrices whose elements involve sine functions
- A characterization of translational hulls of a strongly right type B semigroup
- Common fixed point results for two families of multivalued A–dominated contractive mappings on closed ball with applications
- Lp estimates for maximal functions along surfaces of revolution on product spaces
- Path-induced closure operators on graphs for defining digital Jordan surfaces
- Irreducible modules with highest weight vectors over modular Witt and special Lie superalgebras
- Existence of periodic solutions with prescribed minimal period of a 2nth-order discrete system
- Injective hulls of many-sorted ordered algebras
- Random uniform exponential attractor for stochastic non-autonomous reaction-diffusion equation with multiplicative noise in ℝ3
- Global properties of virus dynamics with B-cell impairment
- The monotonicity of ratios involving arc tangent function with applications
- A family of Cantorvals
- An asymptotic property of branching-type overloaded polling networks
- Almost periodic solutions of a commensalism system with Michaelis-Menten type harvesting on time scales
- Explicit order 3/2 Runge-Kutta method for numerical solutions of stochastic differential equations by using Itô-Taylor expansion
- L-fuzzy ideals and L-fuzzy subalgebras of Novikov algebras
- L-topological-convex spaces generated by L-convex bases
- An optimal fourth-order family of modified Cauchy methods for finding solutions of nonlinear equations and their dynamical behavior
- New error bounds for linear complementarity problems of Σ-SDD matrices and SB-matrices
- Hankel determinant of order three for familiar subsets of analytic functions related with sine function
- On some automorphic properties of Galois traces of class invariants from generalized Weber functions of level 5
- Results on existence for generalized nD Navier-Stokes equations
- Regular Banach space net and abstract-valued Orlicz space of range-varying type
- Some properties of pre-quasi operator ideal of type generalized Cesáro sequence space defined by weighted means
- On a new convergence in topological spaces
- On a fixed point theorem with application to functional equations
- Coupled system of a fractional order differential equations with weighted initial conditions
- Rough quotient in topological rough sets
- Split Hausdorff internal topologies on posets
- A preconditioned AOR iterative scheme for systems of linear equations with L-matrics
- New handy and accurate approximation for the Gaussian integrals with applications to science and engineering
- Special Issue on Graph Theory (GWGT 2019)
- The general position problem and strong resolving graphs
- Connected domination game played on Cartesian products
- On minimum algebraic connectivity of graphs whose complements are bicyclic
- A novel method to construct NSSD molecular graphs
Artikel in diesem Heft
- Regular Articles
- On the Gevrey ultradifferentiability of weak solutions of an abstract evolution equation with a scalar type spectral operator of orders less than one
- Centralizers of automorphisms permuting free generators
- Extreme points and support points of conformal mappings
- Arithmetical properties of double Möbius-Bernoulli numbers
- The product of quasi-ideal refined generalised quasi-adequate transversals
- Characterizations of the Solution Sets of Generalized Convex Fuzzy Optimization Problem
- Augmented, free and tensor generalized digroups
- Time-dependent attractor of wave equations with nonlinear damping and linear memory
- A new smoothing method for solving nonlinear complementarity problems
- Almost periodic solution of a discrete competitive system with delays and feedback controls
- On a problem of Hasse and Ramachandra
- Hopf bifurcation and stability in a Beddington-DeAngelis predator-prey model with stage structure for predator and time delay incorporating prey refuge
- A note on the formulas for the Drazin inverse of the sum of two matrices
- Completeness theorem for probability models with finitely many valued measure
- Periodic solution for ϕ-Laplacian neutral differential equation
- Asymptotic orbital shadowing property for diffeomorphisms
- Modular equations of a continued fraction of order six
- Solutions with concentration and cavitation to the Riemann problem for the isentropic relativistic Euler system for the extended Chaplygin gas
- Stability Problems and Analytical Integration for the Clebsch’s System
- Topological Indices of Para-line Graphs of V-Phenylenic Nanostructures
- On split Lie color triple systems
- Triangular Surface Patch Based on Bivariate Meyer-König-Zeller Operator
- Generators for maximal subgroups of Conway group Co1
- Positivity preserving operator splitting nonstandard finite difference methods for SEIR reaction diffusion model
- Characterizations of Convex spaces and Anti-matroids via Derived Operators
- On Partitions and Arf Semigroups
- Arithmetic properties for Andrews’ (48,6)- and (48,18)-singular overpartitions
- A concise proof to the spectral and nuclear norm bounds through tensor partitions
- A categorical approach to abstract convex spaces and interval spaces
- Dynamics of two-species delayed competitive stage-structured model described by differential-difference equations
- Parity results for broken 11-diamond partitions
- A new fourth power mean of two-term exponential sums
- The new operations on complete ideals
- Soft covering based rough graphs and corresponding decision making
- Complete convergence for arrays of ratios of order statistics
- Sufficient and necessary conditions of convergence for ρ͠ mixing random variables
- Attractors of dynamical systems in locally compact spaces
- Random attractors for stochastic retarded strongly damped wave equations with additive noise on bounded domains
- Statistical approximation properties of λ-Bernstein operators based on q-integers
- An investigation of fractional Bagley-Torvik equation
- Pentavalent arc-transitive Cayley graphs on Frobenius groups with soluble vertex stabilizer
- On the hybrid power mean of two kind different trigonometric sums
- Embedding of Supplementary Results in Strong EMT Valuations and Strength
- On Diophantine approximation by unlike powers of primes
- A General Version of the Nullstellensatz for Arbitrary Fields
- A new representation of α-openness, α-continuity, α-irresoluteness, and α-compactness in L-fuzzy pretopological spaces
- Random Polygons and Estimations of π
- The optimal pebbling of spindle graphs
- MBJ-neutrosophic ideals of BCK/BCI-algebras
- A note on the structure of a finite group G having a subgroup H maximal in 〈H, Hg〉
- A fuzzy multi-objective linear programming with interval-typed triangular fuzzy numbers
- Variational-like inequalities for n-dimensional fuzzy-vector-valued functions and fuzzy optimization
- Stability property of the prey free equilibrium point
- Rayleigh-Ritz Majorization Error Bounds for the Linear Response Eigenvalue Problem
- Hyper-Wiener indices of polyphenyl chains and polyphenyl spiders
- Razumikhin-type theorem on time-changed stochastic functional differential equations with Markovian switching
- Fixed Points of Meromorphic Functions and Their Higher Order Differences and Shifts
- Properties and Inference for a New Class of Generalized Rayleigh Distributions with an Application
- Nonfragile observer-based guaranteed cost finite-time control of discrete-time positive impulsive switched systems
- Empirical likelihood confidence regions of the parameters in a partially single-index varying-coefficient model
- Algebraic loop structures on algebra comultiplications
- Two weight estimates for a class of (p, q) type sublinear operators and their commutators
- Dynamic of a nonautonomous two-species impulsive competitive system with infinite delays
- 2-closures of primitive permutation groups of holomorph type
- Monotonicity properties and inequalities related to generalized Grötzsch ring functions
- Variation inequalities related to Schrödinger operators on weighted Morrey spaces
- Research on cooperation strategy between government and green supply chain based on differential game
- Extinction of a two species competitive stage-structured system with the effect of toxic substance and harvesting
- *-Ricci soliton on (κ, μ)′-almost Kenmotsu manifolds
- Some improved bounds on two energy-like invariants of some derived graphs
- Pricing under dynamic risk measures
- Finite groups with star-free noncyclic graphs
- A degree approach to relationship among fuzzy convex structures, fuzzy closure systems and fuzzy Alexandrov topologies
- S-shaped connected component of radial positive solutions for a prescribed mean curvature problem in an annular domain
- On Diophantine equations involving Lucas sequences
- A new way to represent functions as series
- Stability and Hopf bifurcation periodic orbits in delay coupled Lotka-Volterra ring system
- Some remarks on a pair of seemingly unrelated regression models
- Lyapunov stable homoclinic classes for smooth vector fields
- Stabilizers in EQ-algebras
- The properties of solutions for several types of Painlevé equations concerning fixed-points, zeros and poles
- Spectrum perturbations of compact operators in a Banach space
- The non-commuting graph of a non-central hypergroup
- Lie symmetry analysis and conservation law for the equation arising from higher order Broer-Kaup equation
- Positive solutions of the discrete Dirichlet problem involving the mean curvature operator
- Dislocated quasi cone b-metric space over Banach algebra and contraction principles with application to functional equations
- On the Gevrey ultradifferentiability of weak solutions of an abstract evolution equation with a scalar type spectral operator on the open semi-axis
- Differential polynomials of L-functions with truncated shared values
- Exclusion sets in the S-type eigenvalue localization sets for tensors
- Continuous linear operators on Orlicz-Bochner spaces
- Non-trivial solutions for Schrödinger-Poisson systems involving critical nonlocal term and potential vanishing at infinity
- Characterizations of Benson proper efficiency of set-valued optimization in real linear spaces
- A quantitative obstruction to collapsing surfaces
- Dynamic behaviors of a Lotka-Volterra type predator-prey system with Allee effect on the predator species and density dependent birth rate on the prey species
- Coexistence for a kind of stochastic three-species competitive models
- Algebraic and qualitative remarks about the family yy′ = (αxm+k–1 + βxm–k–1)y + γx2m–2k–1
- On the two-term exponential sums and character sums of polynomials
- F-biharmonic maps into general Riemannian manifolds
- Embeddings of harmonic mixed norm spaces on smoothly bounded domains in ℝn
- Asymptotic behavior for non-autonomous stochastic plate equation on unbounded domains
- Power graphs and exchange property for resolving sets
- On nearly Hurewicz spaces
- Least eigenvalue of the connected graphs whose complements are cacti
- Determinants of two kinds of matrices whose elements involve sine functions
- A characterization of translational hulls of a strongly right type B semigroup
- Common fixed point results for two families of multivalued A–dominated contractive mappings on closed ball with applications
- Lp estimates for maximal functions along surfaces of revolution on product spaces
- Path-induced closure operators on graphs for defining digital Jordan surfaces
- Irreducible modules with highest weight vectors over modular Witt and special Lie superalgebras
- Existence of periodic solutions with prescribed minimal period of a 2nth-order discrete system
- Injective hulls of many-sorted ordered algebras
- Random uniform exponential attractor for stochastic non-autonomous reaction-diffusion equation with multiplicative noise in ℝ3
- Global properties of virus dynamics with B-cell impairment
- The monotonicity of ratios involving arc tangent function with applications
- A family of Cantorvals
- An asymptotic property of branching-type overloaded polling networks
- Almost periodic solutions of a commensalism system with Michaelis-Menten type harvesting on time scales
- Explicit order 3/2 Runge-Kutta method for numerical solutions of stochastic differential equations by using Itô-Taylor expansion
- L-fuzzy ideals and L-fuzzy subalgebras of Novikov algebras
- L-topological-convex spaces generated by L-convex bases
- An optimal fourth-order family of modified Cauchy methods for finding solutions of nonlinear equations and their dynamical behavior
- New error bounds for linear complementarity problems of Σ-SDD matrices and SB-matrices
- Hankel determinant of order three for familiar subsets of analytic functions related with sine function
- On some automorphic properties of Galois traces of class invariants from generalized Weber functions of level 5
- Results on existence for generalized nD Navier-Stokes equations
- Regular Banach space net and abstract-valued Orlicz space of range-varying type
- Some properties of pre-quasi operator ideal of type generalized Cesáro sequence space defined by weighted means
- On a new convergence in topological spaces
- On a fixed point theorem with application to functional equations
- Coupled system of a fractional order differential equations with weighted initial conditions
- Rough quotient in topological rough sets
- Split Hausdorff internal topologies on posets
- A preconditioned AOR iterative scheme for systems of linear equations with L-matrics
- New handy and accurate approximation for the Gaussian integrals with applications to science and engineering
- Special Issue on Graph Theory (GWGT 2019)
- The general position problem and strong resolving graphs
- Connected domination game played on Cartesian products
- On minimum algebraic connectivity of graphs whose complements are bicyclic
- A novel method to construct NSSD molecular graphs