Choice of handshape and classifier type in placement verbs in American Sign Language
-
Anne Therese Frederiksen


Abstract
This study investigates choice of classifier handshape in the placement verbs MOVE and PUT in American Sign Language (ASL), analyzing data from two deaf ASL signers describing placement events elicited via a semi-structured task. Two questions are addressed in the study: 1) which (handling) handshapes are used with PUT and MOVE for different types of entities, and 2) whether object classifiers can occur with transitive, causative predicates in ASL. The results show that the two signers primarily use three handling handshapes (flat-O, S, and C). Consistent with findings from previous research, these handshapes are generally used to represent entities in an iconic manner based on entity characteristics. Usage of the flat-O handshape extends beyond strictly iconic representation, confirming previous suggestions that it may serve as a generic classifier for handling objects. The study also reports a finding not previously observed for ASL, namely two instances of object classifiers used in transitive predicates, which parallels recent evidence from other sign languages that the relationship between classifier type and argument structure is not categorical. Assimilation and language-specific handshape bias are discussed as factors influencing classifier choice, and the findings are situated within broader principles of body partitioning, perspective, and type of representation in sign languages.
1 Introduction
Research over the past two decades has revealed both similarities and differences in how sign languages vary in type of representation and handshape configuration in nominals and predicates. Work focused on nominals has shown that lexical signs often contain iconic elements, but that the choice of representation type – that is whether the sign depicts the object itself or how it is manipulated by an agent – shows variation both cross-linguistically and as a function of the semantic domain (Brentari et al. 2013, 2015, Padden et al. 2013, 2015, Hwang et al. 2017, Nyst 2007, 2016, 2018, Nyst et al. 2022, Hou 2018, Kimmelman et al. 2018). Given these findings, we might expect similar variation in iconic strategies in predicates that incorporate similar handshapes. The evidence, however, has largely shown cross-linguistic similarity in how handshapes are used in classifier predicates. Different sign languages have relatively similar inventories of handshapes that are used in classifier predicates (e.g., Supalla 1982, Zwitserlood 2003, 2012, Kubuş 2008; but see Nyst 2007 for documentation of the relatively small inventory of classifiers in Adamorobe Sign Language [AdaSL]), and importantly, the different types of representation, handing vs object classifiers, map to transitive vs intransitive predicates the same way across sign languages (Benedicto and Brentari 2004, Benedicto et al. 2007, Pavlič 2016, de Lint 2018, Ferrara 2012, Glück and Pfau 1998, Sevgi and Gökgöz 2023). Nevertheless, studies have found that classifier type does not always predict argument structure (Nyst 2007, de Lint 2010, Brentari et al. 2013, 2015, 2016, Kimmelman et al. 2020). Notably, a recent study by Kimmelman et al. (2019) found transitive uses of object classifiers in the description of the same event across four different sign languages. While findings from previous studies suggest that object classifiers may occur in transitive predicates in American Sign Language (ASL) as well, no studies to date have provided empirical data documenting this.
The present study seeks to further understand the factors governing the choice of classifier and specific handshape in ASL predicates. I focus on the placement verbs MOVE and PUT in elicited placement descriptions by two deaf signers. I present a preliminary inventory of handshapes used for different classes of entities in ASL placement verbs and discuss examples where, for different reasons, there is a choice between either classifier type or handshape configuration in the representation of the same entity. Specifically, I discuss classifier predicates in which the classifier type is expected but the handshape is only weakly iconic. I also show empirical examples of object classifiers occurring with causative transitive predicates in ASL and highlight potential motivations for deviating from the expected mapping between classifier type and argument structure.
1.1 Types of representation
Studies of both sign languages and co-speech gestures typically distinguish between different ways that the hands or body can represent entities. A common distinction in sign language research is between different types of classifiers. The term classifier is largely reserved for verbal expressions, but studies of lexical object descriptions have identified similar handshape distinctions in manual representation type. Exhaustive lists of classifier types involve several categories (e.g., Supalla 1982, Engberg-Pedersen 1993, see Zwitserlood 2012 for an overview), but the two types relevant for the present study are object and handling classifiers. Object classifiers are handshapes where the hand represents the object by iconically depicting some feature of (a part of) the object. Handling classifiers are handshapes that show how an agent handles an object, that is, the handshape used shows what the agent’s hand looks like when handling the object. Handling classifiers thus indirectly represent the object: they do not represent the shape of the object, but instead what the agent’s hand looks like when handling it (McDonald 1982, Shepard-Kegl 1985, Zwitserlood 2003; but see Gökgöz 2024 for an argument that parts of a handling classifier always cross-reference the internal syntactic argument). While the distinction between entity and handling classifier is straightforward for some handshapes (e.g., the flat-O handshape ( ) does not appear to be used as an entity classifier in any sign languages), other handshapes can be used both as object and as handling classifiers (e.g., the C-handshape (
) does not appear to be used as an entity classifier in any sign languages), other handshapes can be used both as object and as handling classifiers (e.g., the C-handshape ( ) can be used as an object classifier representing a cup, as well as a handling handshape showing how a cylindrical object is held). Some classifications distinguish a group of instrument classifiers (e.g., Supalla 1982) that comprises both handshapes showing how an agent not only directly handles another entity (i.e., with a handling handshape), but also handshapes representing a tool that is being manipulated (i.e., with an object handshape). However, subsequent work has often treated handshapes showing an agent handling another entity as handling classifiers, and tool handshapes as object classifiers (Zwitserlood 2012). The next section discusses how these types of representations have been studied in descriptions of entities and predicates.
) can be used as an object classifier representing a cup, as well as a handling handshape showing how a cylindrical object is held). Some classifications distinguish a group of instrument classifiers (e.g., Supalla 1982) that comprises both handshapes showing how an agent not only directly handles another entity (i.e., with a handling handshape), but also handshapes representing a tool that is being manipulated (i.e., with an object handshape). However, subsequent work has often treated handshapes showing an agent handling another entity as handling classifiers, and tool handshapes as object classifiers (Zwitserlood 2012). The next section discusses how these types of representations have been studied in descriptions of entities and predicates.
1.2 Patterns in representation type in lexical signs
The choice of handshape corresponding to different types of representations has been studied extensively in lexicalized nouns cross-linguistically. Both handling and object handshapes are used in lexical signs across all sign languages studied (e.g., Padden et al. 2013, 2015, Hwang et al. 2017, Nyst 2016, 2018, Nyst et al. 2018, 2022, Brentari et al. 2013, 2015, 2016, Ortega et al. 2017), but most languages appear to have a preferred pattern; i.e., they either use mostly object classifiers (e.g., ASL and Al Sayyid Bedouin Sign Language, see Padden et al. 2013; AdaSL and Ghanaian Sign Language, see Nyst et al. 2022), or mostly handling classifiers (e.g., Israeli Sign Language, see Hwang et al. 2017; British Sign Language [BSL] and Hong Kong Sign Language [HKSL], see Padden et al. 2013, Malian Sign Language [LaSiMa] and Bouakako Sign Language [LaSiBo], see Nyst et al. 2022), or both at similar rates (e.g., Kenyan Sign Language, Ethiopian Sign Language, Dutch Sign Language [NGT], see Nyst et al. 2022). In addition, research has revealed that signs belonging to particular semantic fields (e.g. fruits and vegetables; transportation) tend to involve the same type of classifier (object vs handling) across different languages (Kimmelman et al. 2018, Hwang et al. 2017). These findings emphasize that the choice of a specific handshape for a particular sign depends on both specific language preferences and on the meaning of the sign.
1.3 Handshapes in classifier predicates
Given the variability in the handshapes used to describe entities both within and across languages, similar variation might be expected in the classifier handshapes used in verbs. And to some extent, this is true: signers of ASL, Italian Sign Language (LIS), HKSL, and BSL use handling and object handshapes in varying proportions when describing actions typically involving an instrument or a tool, such as eating with a spoon or brushing teeth (Hwang et al. 2017, Brentari et al. 2015). Brentari and colleagues suggest that there may in fact be a complex correlation between handshape type in entity descriptions and in predicates (Brentari et al. 2015, 2016). However, for classifier predicates not involving an instrument, variation appears to be more limited.
One source of variation is different handshape configurations. Despite the iconic nature of classifiers, the same entity may not always elicit the same classifier across sign languages. One reason for this is that handshapes that are used as handling classifiers in one language, may (also) be object classifiers in another language (compare, for example, Supalla 1982, Zwitserlood 2003). But variation also exists between signers of the same sign language (e.g., Zwitserlood 2003, 97–8), and the same language may allow different handshapes for the same object. Handling classifiers in particular appear to be variable. Brentari and colleagues elicited descriptions of just four objects being moved by agents or moving by themselves, and nevertheless observed six different handling handshapes and three different object handshapes. De Lint (2018) similarly observed the most variation in handling handshapes in NGT. The greater variation observed in handling classifiers has been argued to be due to their either simultaneously representing features of the entity and the agent or in fact not necessarily representing features of the entity at all (Engberg-Pedersen 1993, Zwitserlood 2003, Schembri 2003). Thus, handling classifiers vary more in handshape because how an entity is manipulated can vary and may depend on the goal of the manipulation. For example, Schembri (2003) notes that writing with a pen requires a different grip than using a pen as a weapon. Zwitserlood (2003) similarly highlights that different handshapes can be used for a mug depending on whether it is held by the handle or not, and that the handshape used for forceful manipulation may differ from the one used for careful manipulation. Others show that handling handshapes are also affected by whether the handling action involves grasping or touching (Kimmelman et al. 2020, Kayabaşı and Gökgöz 2023, Gökgöz 2024). Overall, however, inventories of classifiers appear to be relatively similar across languages (Zwitserlood 2012).
1.4 Patterns in representation type in predicates
While specific handshapes may vary across and within languages, the choice of representation type in predicates appears to be highly stable. Leaving aside predicates involving the representation of an instrument or tool, which are still being debated (Benedicto and Brentari 2004, de Lint 2018, He 2020), the choice between object and handling handshapes in predicates largely depends on whether or not an agent is involved in the event being described (Kegl 1990, Zwitserlood 2003, Perniss 2007). Consider the examples in Figure 1 (recreated from Zwitserlood 2003, 127). The sentence in Figure 1a describes the stative event of a book lying (on a table). The sentence in Figure 1b describes the agentive event of someone putting a book on a table. Both examples involve a classifier. In Figure 1a, the classifier is an object classifier, specifically a B-handshape ( ) used as the subject of a predicate denoting the location of an object. In Figure 1b, the classifier is a handling classifier, specifically a flat C-handshape (
) used as the subject of a predicate denoting the location of an object. In Figure 1b, the classifier is a handling classifier, specifically a flat C-handshape ( ) used as the object of the verb MOVE. In both examples, too, the classifier represents the theme argument, the book. The entity classifier in Figure 1a represents the book directly, and the handling classifier in Figure 1b does so indirectly.
) used as the object of the verb MOVE. In both examples, too, the classifier represents the theme argument, the book. The entity classifier in Figure 1a represents the book directly, and the handling classifier in Figure 1b does so indirectly.

Intransitive vs transitive event descriptions of location of a book (recreated from Zwitserlood 2003, 127, Figure 41). (a) LOCdown-be-CL:flat ent ‘There is a book (on the table)’. (b) x-move-LOCdistal-CL:thick flat ent ‘(Someone) puts a book down (on the table)’.
Previous studies have highlighted the existence of so-called ‘minimal pairs’ (de Lint 2018), that is, classifier predicates that can alternate between agentive and non-agentive forms by keeping place of articulation and movement constant, but varying the handshape (Zwitserlood 2003, Benedicto and Brentari 2004). Benedicto and Brentari contrast the examples in 1): Examples 1a) and 1b) share the same verb root MOVE, but 1a) uses a C-handshape handling classifier and is transitive, whereas 1b) uses a B-handshape object classifier and is intransitive (2004, 752).
| 1a) | [ø] BOOK C + MOVE |
| “S/he took the (standing) book and laid it down on its side” | |
| 1b) | BOOK B + MOVE |
| “The (standing) book fell down on its side” |
Crucially, the existence of the alternation implies that object classifiers such as Figure 1a cannot be used to describe the transitive event of an agent putting a book on a table and that handling classifiers such as Figure 1b cannot be used to describe the intransitive event of a book being located on a table (Zwitserlood 2003, 127). As such, the choice of classifier handshape is closely connected to the argument structure of the verb and indicates verb valence: object classifiers occur in intransitive predicates, while handling classifiers occur in transitive predicates.
Benedicto and Brentari (2004) provided a formal linguistic analysis of this phenomenon in ASL (see also Grose et al. 2007, de Lint 2010). They argue that classifiers project syntactic structure and thereby determine whether an associated argument becomes the subject or object argument. Although analyses differ, studies of other sign languages have shown this pattern to be robust cross-linguistically, e.g., Benedicto et al. (2007) for Argentinean Sign Language (LSA) and Catalan Sign Language (LSC); Pavlič (2016) for Slovenian Sign Language (SZJ), de Lint (2018) for NGT; Ferrara (2012) for Australian Sign Language (Auslan); Glück and Pfau (1998) for German Sign Language (DGS), Sevgi and Gökgöz (2023) for TİD. It should be noted, however, that while there is widespread agreement among the studies discussed that the two classifier types typically go together with different argument structure, some frame the relationship as a correlation rather than the classifier being the determinant for the argument structure (e.g., Kimmelman et al. 2019), leaving open the possibility that event type may affect the choice of classifier type.
While it seems clear that the correlation between classifier type and predicate-argument structure exists and appears stable cross-linguistically, most of the studies documenting it rely on author intuitions or judgments from a few signers. The evidence from experimental studies reveals more variation. For example, de Lint (2010) used a picture-sign matching paradigm to investigate the association between classifiers and argument structure in the comprehension of ASL agentive and non-agentive events. Her results showed that signers frequently accept the use of both object and handling classifiers as descriptors of the agentive contexts predicted to allow only handling classifiers. While this suggests a less-than-categorical division of labor between the two classifier types, de Lint’s study did not elicit sign productions, and she therefore interpreted this result as participants possibly accepting result-oriented intransitive descriptions such as ‘the pen broke’ in response to events in which a person broke the pen. Findings from other studies, however, suggest that this result instead may indicate that the correlation between classifier type and argument structure is not absolute. Specifically, Brentari and colleagues elicited nouns and classifier predicates from child and adult ASL signers using stimuli involving events in which objects (e.g., pen, book) were located on a table, or were placed there by an agent (Brentari et al. 2013). While their results broadly conformed to the expectation of handling classifiers in agentive contexts and object classifiers in no-agent contexts, the expected perfect association between agentive contexts and handling classifiers was again not found, not even for the adult signers. Instead, the proportion of entity classifiers used in descriptions of stimuli involving an agent was around 20%. Similar results were found by Brentari et al. (2015, 2016) who replicated the findings from adult ASL signers of a significant proportion of object classifiers in agentive contexts and documented the same pattern in three other sign languages: LIS, HKSL, and BSL. Similar results were found for Central Taurus Sign Language (CTSL, Ergin and Brentari 2017).
The question then becomes whether these noncanonical productions should in fact be seen as evidence against the strongest version of the hypothesis that there is a canonical and invariable relationship between classifier type and argument structure. In the studies discussed above, it is not clear whether the object classifiers in agentive contexts were intransitive sentences used to describe the agentive events (as hypothesized by de Lint 2010), or whether they were in fact object classifiers used with transitive predicates. Brentari et al. (2013) do not specify what form the unexpected responses took but mention that they are not correct. Under Benedicto and Brentari’s (2004) analysis, the use of classifiers with transitive predicates should be ungrammatical (as should the use of handling classifiers with intransitive predicates, which is in fact better supported by the experimental evidence, e.g., Brentari et al. 2013, 2015). The results from recent cross-linguistic studies, however, suggest that the use of an object classifier in a transitive causative verb, while unexpected from a frequency perspective, is grammatical, supporting the idea that at least some of the unexpected responses discussed above are due to such noncanonical mappings. Kimmelman et al. (2019) investigated argument structure in classifier predicates in four sign languages: Russian Sign Language, DGS, NGT, and Kata Kolok Sign Language. Unlike the experimental studies by Brentari and colleagues, this study investigated classifier predicates in the context of narratives based on cartoons. Despite the different elicitation materials, the study found that most classifier predicates display the expected canonical structure: intransitive predicates are associated with entity classifiers and transitive predicates are associated with handling classifiers. However, across the four sign languages, 1–8% of the predicates did not display the expected mapping. One situation, that of an agent putting a plank on a box, elicited the unexpected mapping in all four sign languages. Similar occurrences of object classifiers in transitive causative predicates were reported in a recent study by He (2020) for Tianjin Sign Language, Beijing Sign Language, and HKSL. Additionally, Sevgi and Gökgöz (2023) and Nyst (2007, 169–72) note the existence of this mapping for TİD and AdaSL. Their examples include an agent putting a stick in a turtle’s neck, and an agent throwing a rock, where the stick and the rock are represented by entity classifiers (Nyst 2007); a child holding a nail on the wall (Sevgi and Gökgöz 2023); and a boy opening a book (He 2020). He and Kimmelman and colleagues argue against a fully rigid association between classifier type and argument structure (see also Kimmelman et al. 2020), and He specifically argues against the idea of the object classifier as consistently intransitive (p. 278).
2 Examples from ASL placement events
In what follows, I use data from ASL to illuminate what determines the choice of handshape in two spatial verbs, MOVE and PUT. In this preliminary study, I discuss two related questions, namely which handshapes are used for which types of entities, and whether ASL allows an alternation between handling and object classifiers in transitive, causative placement verbs.
2.1 Data
The data reported here consist of placement descriptions in ASL. Two deaf ASL signers provided descriptions of 25 placement events in a director-matcher task (Clark and Wilkes-Gibbs 1986). The stimulus events consisted of a man moving objects (e.g., a bowl, a book, a picture frame, a bottle) to different locations. The list of target objects and placement events can be found in the appendix. These data were originally collected for a study of hearing ASL second language learners’ placement descriptions reported in Frederiksen (2021). The director–matcher task produces naturalistic data in as far as the conversation partners are free to choose words, structures, etc. However, as the topic of conversation is constrained by the experimental task, the data are not free conversational data.
The deaf signers were 21 and 62 years of age, white, female, and had been using ASL in family contexts since birth. They watched video clips of the placement events and explained to another deaf signer what happened in each clip. Deaf and hearing ASL signers transcribed and coded the data using ELAN transcription software (Wittenburg et al. 2006). One deaf signer transcribed the placement descriptions and coded for verb types (i.e., MOVE, PUT, HANG, etc.). Together with a highly proficient hearing signer, this deaf signer also coded for whether the placement verb was used in citation form or with an incorporated classifier (entity, handling). Questions were resolved through discussion between the two coders and the author, a conversationally fluent hearing L2 signer. Additional details and coding examples are available in Frederiksen (2021). The coding focused on the first complete description of each placement event. Since the stimulus events consisted of a man moving objects to different locations, the signers’ descriptions typically included reference to the entity being moved, generally in the form of a lexical noun phrase, a predicate, most frequently MOVE or PUT, and often the final location of the entity. In line with the ubiquity in ASL of dropping overt arguments (Lillo-Martin 1986, Wulf et al. 2002), the agent was typically not expressed with an overt nominal.
The experimental paradigm involved the director explaining to the matcher (a deaf signer) what happened, and the matcher representing the entity locations on a drawing of an empty room. The matcher could not see the video stimuli, and the director could not see the matcher’s drawing. In addition to the first descriptions of each event, this procedure elicited repetitions, elaborations, and answers to questions from the matcher, but these were not analyzed. The data analyzed here additionally include ratings of each placement description. A deaf signer rated each placement description. This signer had been exposed to ASL since birth by multiple deaf family members and uses ASL as their primary language. The signer was naïve to the original study’s purpose and was tasked with judging the placement descriptions on the goodness of the ASL used on a scale from 1 (worst) to 5 (best). The rating instructions were kept minimal to avoid revealing the purpose of the study and unintentionally biasing the rater.
The present study focuses only on the data from the two deaf signers and provides in-depth analyses and descriptions not previously reported. For the purposes of the present study, I focus on the subset of event descriptions that involved either MOVE or PUT. Both these verbs belong to the class of spatial verbs in ASL (cf. Padden 1988) and are typically signed with classifier handshapes that vary with the object being placed. Eight event descriptions across six objects were excluded from analysis because they used verbs other than MOVE or PUT (most frequently HANG). Four excluded descriptions were of the same two objects. Thus, a total of 42 descriptions (MOVE: n = 33, PUT: n = 9), across 23 target objects, were included in the analysis with the placement of 19 target objects being described by both signers, and four being described by only one signer.
2.2 Results
I first focus on which handshapes were used in the ASL data and the extent to which the handshapes iconically represent entities. As placement events typically elicit transitive predicates, the majority of classifiers in the present data are expected to be handling classifiers. With respect to the choice of specific handshapes, previous work has shown clear iconicity in signers’ choice of classifier handshapes (e.g., Schick 1987, Zwitserlood 2003). However, because handshapes tend to be iconic, the handshape inventory elicited in any given task depends on the entities being described. In this analysis, the 23 target objects are placed in one of four groups, largely corresponding to object shapes discussed by Zwitserlood (2012), depending on entity characteristics: entities that are taller than wide (e.g., glass and speaker); entities that are thin and flat (e.g., magazine, picture); entities that are, or have parts that are, long and thin (e.g., candle, wine bottle); and other entities with multiple parts that may not share characteristics (e.g., ‘hat’ has a generally bulky shape with a flat, thin brim). Based on previous work, taller-than-wide entities are expected to be represented with a C-handshape, thin-and-flat entities with a flat-O-handshape, and long-and-thin entities with an S-handshape (Schick 1987, Zwitserlood 2003).
2.2.1 Variation in classifier handshape in MOVE and PUT
The present data show that three handshapes were used frequently by the two signers: flat-O ( ), S (
), S ( ), and C (
), and C ( ); four others were used infrequently: Flat-C (
); four others were used infrequently: Flat-C ( ), O (
), O ( ), B (
), B ( ), and baby-C (
), and baby-C ( ). The judgment ratings of the classifiers were generally high, with no classifiers receiving ratings of one or two, one classifier receiving a rating of three, nine receiving a rating of four, and the remaining 32 receiving the highest rating of five. Most of the classifiers were handling classifiers. There were only two exceptions, namely the baby-C and B-classifiers used for the thin-and-flat entities plates and pictures. These two classifiers were coded as object classifiers and will be discussed in the next section. Table 1 shows which handshapes were used by the signers for each individual entity in the four groups as well as the rating given to the description that the classifier occurred in. As the table shows, taller-than-wide entities are typically represented by a C-handshape. Entities that are (or have a part that is) long and thin (candle, lamp, paper towel holder, water bottle, wine bottle, and silverware) are represented with the S-handshape (except one description of silverware which used an O-handshape). Flat, thin entities (laptop, magazine, tablecloth, throw, plates, picture, bag, and scarf) are represented with the flat-O handshape. The entity book that is flat but somewhat thicker is represented with a flat-C handshape. Schick (1987) treats the flat-C handshape as a size-based variant of the flat-O handshape.
). The judgment ratings of the classifiers were generally high, with no classifiers receiving ratings of one or two, one classifier receiving a rating of three, nine receiving a rating of four, and the remaining 32 receiving the highest rating of five. Most of the classifiers were handling classifiers. There were only two exceptions, namely the baby-C and B-classifiers used for the thin-and-flat entities plates and pictures. These two classifiers were coded as object classifiers and will be discussed in the next section. Table 1 shows which handshapes were used by the signers for each individual entity in the four groups as well as the rating given to the description that the classifier occurred in. As the table shows, taller-than-wide entities are typically represented by a C-handshape. Entities that are (or have a part that is) long and thin (candle, lamp, paper towel holder, water bottle, wine bottle, and silverware) are represented with the S-handshape (except one description of silverware which used an O-handshape). Flat, thin entities (laptop, magazine, tablecloth, throw, plates, picture, bag, and scarf) are represented with the flat-O handshape. The entity book that is flat but somewhat thicker is represented with a flat-C handshape. Schick (1987) treats the flat-C handshape as a size-based variant of the flat-O handshape.
Handshapes in and ratings of descriptions of entities with different characteristics
| Entity | Handshape 1 | Rating | Handshape 2 | Rating |
|---|---|---|---|---|
| Taller than wide | ||||
| Glass | C | 5 | C | 5 |
| Speaker | C | 5 | C | 5 |
| Bowl | C | 5 | C | 5 |
| Potted plant | C | 5 | Flat O | 4 |
| Thin and flat | ||||
| Magazine | Flat O | 5 | Flat O | 5 |
| Tablecloth | Flat O | 5 | Flat O | 5 |
| Throw | Flat O | 5 | Flat O | 5 |
| Laptop | Flat O | 5 | Flat O | 4 |
| Book | Flat C | 5 | Flat C | 5 |
| Plates | Flat O | 4 | Baby-C | 5 |
| Picture | Flat O | 5 | B | 5 |
| Scarf | Flat O | 5 | NA | NA |
| Long and thin | ||||
| Candle | S | 5 | S | 4 |
| Lamp | S | 5 | S | 4 |
| Paper towel holder | S | 5 | S | 5 |
| Water bottle | S | 5 | S | 5 |
| Wine bottle | S | 5 | S | 4 |
| Silverware | S | 5 | O | 5 |
| Others | ||||
| Pillow | Flat O | 5 | Flat-O | 4 |
| Bundle of cables | S | 4 | O | 5 |
| Hat | S | 5 | NA | NA |
| Bag | Flat O | 4 | NA | NA |
| Basket | Flat O | 3 | NA | NA |
Thus, for these three categories, handshape choice is highly consistent, and ratings are generally high. Variation (highlighted in bold in the table) is limited to the entities’ potted plant, and silverware, as well as plates and pictures which will be discussed below. In the case of silverware, the choice of the S- vs the O-handshape may reflect a difference in the perception of the size of the entity (Schick 1987). This conclusion is supported by the fact that both handshapes received the highest rating. In the case of the descriptions of the potted plant, one signer used a C-handshape and the other used a flat-O handshape. The flat-O handshape representing the potted plant in Figure 2 received a lower rating, most likely because a potted plant might be expected to elicit a C-handshape, similar to bowl or speaker.

MOVE plant.
The fourth category composed of other entities shows more variation, as is expected given that the entity characteristics are less homogenous in this category. Here, the signers used S-, O-, and flat-O handshapes to refer to the entities pillows, bundle of cables, hats, bags, and baskets, but several entities were described by only one signer. Of note is the use of the flat-O handshape for entities in this category. The entities bag and basket were both represented with flat-O-handshapes that received lower ratings. In the representation of the entity bag in Figure 3, an S-handshape would more clearly reflect grabbing and holding the flexible leather strap of the bag in the stimulus materials. Similarly, in Figure 4, the handshape, and perhaps especially the hand orientation, does not clearly reflect how one would hold a wicker basket.

MOVE bag.

MOVE basket.
It is clear that the flat-O handshape is used to represent thin and flat entities such as laptops, pictures, and scarves. However, the present data also hint at a broader generalizability of the flat-O classifier. Specifically, the ability of the flat-O handshape to be used instead of more iconic handshapes for a variety of objects suggests a low degree of semantic specificity in this classifier. This is further supported by the weak iconicity of the hand orientation in examples where the flat-O handshape itself is iconic, such as Figure 5. In Figure 5, the flat-O handshape used reasonably reflects one way an agent might handle a stack of plates. However, the hand orientation is not iconic. Specifically, the signer’s fingers are extended downwards in a way that does not iconically reflect how one would hold a stack of plates and place it on a table. Although the data here are not sufficient to determine this with any degree of certainty, the use of flat-O with a relatively weak iconic representation of actual manipulation either in terms of the orientation or the hand configuration suggests the existence of a generic classifier in ASL. This is in line with Shepard-Kegl’s (1985) suggestion that this classifier can be “interpreted as a handling relation that is unspecified for the size and shape of the object being handled” (p. 97). Zwitserlood (2003, 111) similarly discusses the flat-O handshape as a classifier that can be used in NGT for entities such as cars or houses that cannot normally be held in the hand. The pertinent uses of the flat-O handshape in the present data, however, represent the handling of entities such as plates and a potted plant, which can in fact be held in the hands. Thus, the evidence from this study confirms Shepard-Kegl’s observation that flat-O serves as a generic classifier in ASL. The relatively low ratings of many of these generic uses, however, may suggest variability in use and acceptance within the signing community.

PUT plate.
2.2.2 Classifier type alternations with MOVE and PUT
The next question I address is whether there is evidence in these data showing a possible alternation between object and handling classifiers in placement verbs, specifically of object classifiers being used in transitive contexts. As discussed, Benedicto and Brentari (2004) argue that the classifier determines whether the predicate will be transitive or intransitive. More recent evidence suggests that the correlation may not be fully categorical (Kimmelman et al. 2019, He 2020, Sevgi and Gökgöz 2023), but to my knowledge, no study to date has presented specific evidence that ASL allows object classifiers with transitive predicates. Studies such as de Lint (2010) and Brentari et al. (2013) show that agentive contexts (i.e., those expected to be associated with transitive constructions) do not always lead to a 100% handling classifier rate in ASL, but it is not possible to discern from their data whether or not signers in fact use or accept transitive constructions with object classifiers. Given that this type of mapping has now been attested in several sign languages, however, we may expect it to occur in ASL as well. Below, I analyze the two object classifiers that occurred with MOVE in the present data.[1]
Figure 6 shows a signer explaining that a man placed a stack of two plates on a table. The signer first signs the lexical sign PLATE (panel a), which is repeated. The sign PLATE is lexicalized with a baby-C handshape. The signer then moves both hands left while maintaining the baby-C handshape on each hand. Finally, she articulates the placement verb MOVE with the same handshape still in place, moving from her left to the space in front of her body (panel b).[2]
(TWO) PLATE (a), MOVE (b).
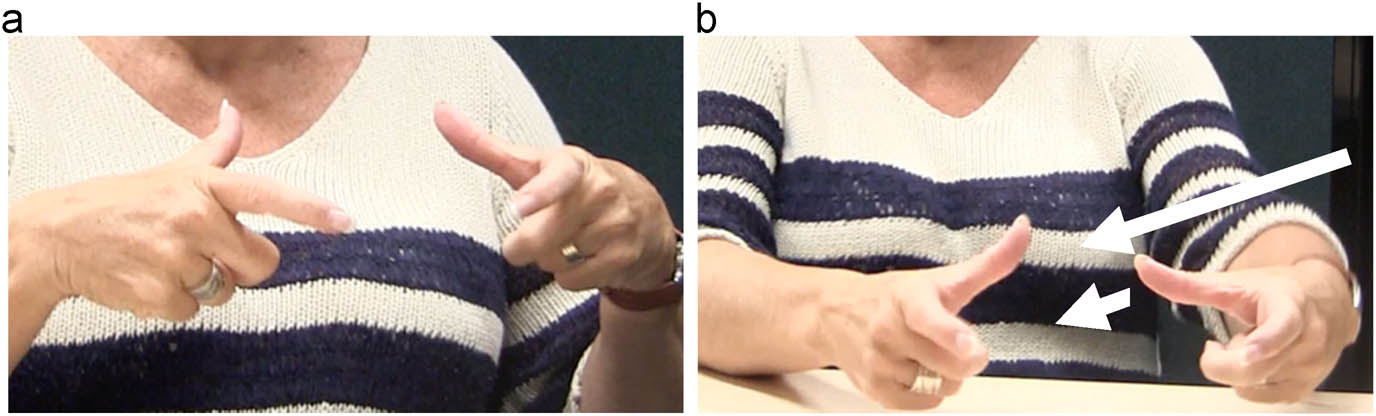
A similar example is shown in Figure 7, where the signer explains how the man from the stimulus moved a picture frame from its original location to a counter. She starts by signing PICTURE (panel a). She then establishes the original location of the picture to her right, using a B-handshape object classifier (panel b). Then, she clarifies that she does not remember the exactly original location, and then she resumes the B-handshape for her articulation of MOVE, which starts at the location on her right and ends in the space in front of her body where her non-dominant hand holds a downward-facing B-handshape representing the counter (panel c). In both of these examples, the verb MOVE is clearly articulated with an object classifier. Further, both examples received the highest possible rating from the deaf signer naïve to the study, supporting the idea that these are valid constructions in sign languages. The question, however, is whether these examples should be interpreted as intransitive predicates, e.g., the picture moved, or as transitive predicates with entity classifiers, e.g., the man moved the picture. As discussed earlier, the placement descriptions rarely included overt mention of the agent. Thus, the examples in Figures 6 and 7 have the overt structure (noun) verb. While the basic word order in ASL is subject–verb–object (Sandler and Lillo-Martin 2006), the basic word order in sign language can be overridden by a classifier predicate (Pavlič 2016). Because pre-verbal arguments are preferred with classifier verbs, the resulting overt structure in ASL transitive classifier constructions is noun noun verb. Given the tendency to drop overt arguments in ASL (Lillo-Martin 1986, Wulf et al. 2002), both transitive and intransitive sentences can have the overt structure (noun) verb. The inherent challenge of determining the valency of a predicate when arguments may be covert is compounded when investigating predicate pairs which may differ only in handshape. This is especially true when the question of interest is variation in handshape. Brentari et al. (2013) and Kimmelman et al. (2019) relied on the coders’ understanding of the event structure and spatial orientations in the stimulus items. The utterances analyzed here are descriptions of a man placing different objects in a variety of locations. As such, these descriptions are expected to primarily involve transitive constructions, and indeed world-knowledge is likely to preclude intransitive placement descriptions in which the entity moves across the room of its own volition, e.g., ‘the book moved from the counter to the bookshelf’. A close analysis of the movement and orientation in the predicates in Figures 6 and 7 shows clear parallels with the actions of the agent in the stimulus. In the present study, the data were descriptive rather than narrative, and therefore, the use of constructed action was limited. An analysis of facial expressions to help identify the presence of an agent in the transitive sentences was therefore not pursued. If we accept that the types of examples discussed here constitute object classifiers used in transitive contexts, then nearly 5% of the MOVE/PUT verbs in these data (2 out of 42) occur with entity classifiers, which is comparable with the findings in the study by Kimmelman et al. (2019) who found rates between 1 and 8% in the four sign languages they studied. Thus, these preliminary data suggest that in ASL as in other sign languages, signers can vary not only the handshape configuration in transitive classifier predicates but also the classifier type.

PICTURE (a), PICTURE-BE-LOCATED-RIGHT (b), and MOVE (c).
2.2.3 Accounting for variation in classifier type and handshape configuration
An interesting proposal for what might cause an object classifier to show up in a non-prototypical context comes from Nyst (2007). She suggests that assimilation effects may play a role in the phenomenon in AdaSL. In her examples of object handshapes, the classifier is generally adjacent to another sign with the same handshape, which she argues may account for the phenomenon (2007, 157). It should be noted that Nyst (2007) invokes assimilation to explain the occurrence of what looks like object classifiers in AdaSL where this classifier type is otherwise scarce. This is obviously different from the situation in ASL where both classifier types are frequent and the question to be answered is not what causes a classifier to (unexpectedly) occur at all, but rather what causes an unexpected classifier type to occur in a particular construction. Nevertheless, both examples of unexpected object classifiers in the present study could conceivably be due to assimilation. The baby-c classifier representing plates in Figure 6 is adjacent to the lexical sign PLATE that also uses the baby-c handshape. Thus, under an assimilation account, the signer maintains the handshape from the lexical sign during articulation of the predicate MOVE. MOVE can incorporate a classifier, and instead of changing the handshape to that of a handling classifier, the signer maintains the handshape from the lexical sign PLATE, which also happens to be the handshape of an entity classifier.
The B-classifier representing the picture frame in Figure 7 is not immediately adjacent to another sign with the same handshape. However, what immediately precedes the classifier is the signer’s inserted explanation that she does not remember where exactly the picture was located. At the beginning of the utterance, she signs the sign PICTURE, which has the B-handshape on the non-dominant hand. Thus, either assimilation or lingering handshape activation may also help explain this phenomenon for ASL, with the assumption being that what would typically be an incorporated handling classifier instead becomes an incorporated entity classifier, perhaps for reasons of efficient articulation. There are numerous examples, however, where the handshape of the lexical sign does not trigger an object classifier. For example, in Figure 5 above the signer signs PLATE directly followed by a flat-O classifier handshape. Finally, the small number of data points analyzed in the present study limits the conclusions that can be drawn about this phenomenon in ASL in general. The conditions under which such assimilation is expected to take place should therefore be investigated further in future work.
A related question is how the primacy of object handshapes in the ASL lexicon may affect classifiers in predicates. In her study of child ASL acquisition, Schick (1987) found that children tended to produce object handshapes correctly more often than handling handshapes. Brentari et al. (2013) found an influence on the choice of classifier type of the handshape used in the lexical noun that was co-referential with the classifier. While ASL signing children were adult-like in their use of objects and handling classifiers in transitive and intransitive contexts when the noun for the figure object had a lexicalized handling handshape (e.g., PEN), Brentari and colleagues found that children overused object classifiers in transitive contexts when the noun contained an object handshape (e.g., BOOK). Adults similarly used object classifiers in transitive contexts, although they never used handling handshapes in intransitive contexts. Brentari and colleagues speculate that the overextension of object classifiers may be linked to what they describe as a general object handshape bias in ASL. This explanation would predict that languages such as HKSL and BSL that have a general handling handshape bias should overuse handling classifiers in intransitive predicates, but not object classifiers in transitive predicates. While Brentari et al. (2015) indeed report greater use of handling classifiers in no-agent contexts in BSL and HKSL compared to ASL, both BSL and HKSL have higher proportions of object classifiers than handling classifiers in unexpected contexts. Thus, it remains to be explained both what accounts for cross-linguistic variation in which unexpected classifier types can occur, as well as under which conditions the unexpected classifiers can occur within a language. For the purpose of understanding when object classifiers can occur with transitive uses of predicates like MOVE, future research should also investigate whether there are formational aspects other than handshape of the transitive/intransitive versions of MOVE that may help distinguish their uses.
Moving beyond the focus on the link between argument structure and classifier types, however, another possibility is that these ‘unexpected’ constructions simply reflect the reality of sign language discourse. The occurrence of representation types that are less typical in a particular situation is well-documented in studies investigating narratives and has been argued to contribute to vivid storytelling (Liddell 2003, Dudis 2004, Janzen 2004, Perniss 2007, Perniss and Özyürek 2008, Engberg-Pedersen 2015). Dudis (2004) discusses how the signer’s body contains partitionable zones that can show different referents via different types of representation. Specifically, he gives the example of a signer showing a person driving a motorcycle up a hill (2004, 225), in which the motorcyclist is mapped to the signer's torso and face as is visible from the signer’s facial expression, the motorcycle is mapped to the signer’s right hand via a semantic vehicle classifier, and the hill is mapped to the signer’s left hand via another object classifier. Perniss (2007, 1320) similarly discusses alignment between classifier types and what she calls perspective, which is the vantage point on the event and the size of the event space. Under her analysis, handling classifiers are typically used with character perspective (i.e., a life-sized event space with the signer being conceptualized as ‘within’ the space, p. 1316), and entity classifiers with observer perspective (i.e., a reduced-scale event space with the signer being conceptualized as outside the space, p. 1317). The option exists, however, to use non-prototypical classifier alignment, that is, to use object classifiers with character perspective, or handling classifiers with observer perspective. Sevgi and Gökgöz (2023) suggest that an object classifier may surface in a transitive predicate when a signer takes an observer perspective which may override what would otherwise be the typical handshape for the predicate type. To illustrate with examples from the present study, we might imagine observer perspective to be best suited to the nature of the task, specifically the need to keep track of the starting and ending points of different objects within a scene that is topographically complex (compare with signers’ frequent use of ‘survey’ perspective in a map description task in Emmorey et al. 2000). At the same time, the task in the present study requires describing what happened, rather than where objects are located, which encourages the use of a transitive predicate (Gullberg 2009). A transitive predicate like MOVE typically involves a handling classifier, but following the suggestion by Sevgi and Gökgöz (2023) this default would be overridden by the pressure toward classifier-perspective alignment, resulting in the substitution of an entity classifier for the default handling classifier. However, more work is needed to understand when the pressure towards alignment applies. In the present study, we must assume that the benefit of using observer perspective is similar across all placement descriptions. Yet, in most descriptions, a transitive predicate was used with a handling classifier, and the evidence suggests that non-prototypical alignment, e.g., combining observer perspective with a handling classifier, is not infrequent (Perniss 2007, Perniss and Özyürek 2008). Thus, more work is needed to understand the conditions under which one type of perspective would exert enough pressure to override the default classifier type for a predicate as suggested by Sevgi and Gökgöz (2023). Importantly, this undertaking also requires a clear definition of what perspective is and how to identify it, without relying on the type of representation in classifiers (Engberg-Pedersen 2015, see also Frederiksen 2017).
3 Conclusion
This study investigated the classifier types and handshapes used with the placement verbs MOVE and PUT in ASL, using relatively naturalistic data from two deaf signers. While they should be considered preliminary because of the small number of data points, the results suggest that signers primarily use handling classifiers in these transitive constructions, with three handshapes (flat-O, S, and C) being the most frequent as expected based on the characteristics of the entities being placed. The analysis also showed that the flat-O handshape appears to function as a generic classifier for handling objects.
Notably, the data include two instances of object classifiers occurring with the transitive, causative predicate MOVE, adding to the challenge posed by recent studies to the claim of a strictly categorical mapping between classifier type and argument structure. The mounting evidence of object classifiers in transitive constructions across different sign languages highlights alternations in classifier type as a valid phenomenon, albeit a relatively infrequent one.
Acknowledgments
This research was made possible in part with funding from The Tow Foundation. The author also thanks DeAnna Suitt, Samantha Moreno, Kalvin Morales, Matthew Sampson, and Monica Keller for their help with the original data collection, annotation, coding, and ASL judgments.
-
Funding information: Open access publication was supported by funding from the Tow Foundation.
-
Author contribution: The author confirms the sole responsibility for the conception of the study, presented results, and manuscript preparation.
-
Conflict of interest: The author states no conflict of interest.
-
Data availability statement: The data analysed in the present study are available from the author upon reasonable request.
Objects and events in the stimulus materials:
Bag – a man hangs a bag over a door handle
Basket – a man moves a basket under a counter
Book – a man places a book in between other books on in a bookshelf
Bowl – a man puts a bowl on a table
Bundle of cables – a man put a bundle of cables on a bookshelf
Candle – a man puts a candle (in a candleholder) on a dining table
Glass – a man sets a glass on a dining table
Hanger (not included in analysis)
Hat – a man puts a hat on a coat rack
Jacket (not included in analysis)
Lamp – a man puts a floor lamp next to a door
Laptop – a man puts a laptop on a stool under a table
Magazine – a man puts a magazine on a table
Paper towel holder – a man puts a paper towel holder on a kitchen counter
Picture – a man puts a picture frame on a bookshelf
Pillow – a man puts a pillow on a chair
Plant – a man puts a potted plant on a table
Plates – a man puts two plates, stacked, on a dining table
Scarf – a man places a scarf over the back of a chair
Silverware – a man places silverware on top of a stack of plates
Speaker – a man puts a small loudspeaker on a countertop
Tablecloth – a man spreads a tablecloth over a dining table
Throw – a man places a throw blanket over the side of a couch
Water – a man puts a bottle of water on a dining table
Wine – a man puts a wine bottle into a refrigerator
References
Benedicto, Elena and Diane Brentari. 2004. “Where Did All the Arguments Go?: Argument-Changing Properties of Classifiers in Asl.” Natural Language and Linguistic Theory 22 (4): 743–810. 10.1007/s11049-003-4698-2.Search in Google Scholar
Benedicto, Elena, Sandra Cvejanov, and Josep Quer. 2007. “Valency in Classifier Predicates: A Syntactic Analysis.” Lingua 117 (7): 1202–15. 10.1016/j.lingua.2005.06.012.Search in Google Scholar
Brentari, Diane, Marie Coppola, Ashley Jung, and Susan Goldin-Meadow. 2013. “Acquiring Word Class Distinctions in American Sign Language: Evidence from Handshape.” Language Learning and Development 9 (2): 130–50. 10.1080/15475441.2012.679540.Search in Google Scholar
Brentari, Diane, Alessio Di Renzo, Jonathan Keane, and Virginia Volterra. 2015. “Cognitive, Cultural, and Linguistic Sources of a Handshape Distinction Expressing Agentivity.” Topics in Cognitive Science 7 (1): 95–123. 10.1111/tops.12123.Search in Google Scholar
Brentari, Diane, Chiara Branchini, Jordan Fenlon, Laura Horton, and Gladys Tang. 2016. “Typology in sign languages: Can it be predictive?” In Proceedings from the 51st annual meeting of the Chicago Linguistics Society, edited by Ksenia Ershova, Joshua Falk, Jeffrey Geiger, Zachary Hebert, Robert E. Lewis Jr., Patrick Munoz, Jacob B. Phillips, and Betsy Pillion. 47–65. Chicago: Chicago Linguistic Society.Search in Google Scholar
Clark, Herbert H. and Deanna Wilkes-Gibbs. 1986. “Referring as a Collaborative Process.” Cognition 22 (1): 1–39. 10.1016/0010-0277(86)90010-7.Search in Google Scholar
Dudis, Paul G. 2004. “Body Partitioning and Real-Space Blends.” Cognitive Linguistics 15 (2): 223–38. 10.1515/cogl.2004.009.Search in Google Scholar
Emmorey, Karen, Barbara Tversky, and Holly A. Taylor. 2000. “Using Space to Describe Space: Perspective in Speech, Sign, and Gesture.” Spatial Cognition and Computation 2: 157–80. 10.1023/A:1013118114571.Search in Google Scholar
Engberg-Pedersen, Elisabeth. 1993. Space in Danish Sign Language: The Semantics and Morphosyntax of the Use of Space in a Visual Language. Hamburg: Signum.Search in Google Scholar
Engberg-Pedersen, Elisabeth. 2015. “Perspective in Signed Discourse: The Privileged Status of the Signer’s Locus and Gaze.” Open Linguistics 1 (1): 411–31. 10.1515/opli-2015-0010.Search in Google Scholar
Ergin, Rabia and Diane Brentari. 2017. “Handshape Preferences for Objects and Predicates in Central Taurus Sign Language.” In Proceedings of the 41st Annual Boston University Conference on Language Development, edited by Maria LaMendola and Jennifer Scott, 222–35. Somerville, MA: Cascadilla Press.Search in Google Scholar
Ferrara, Lindsay N. 2012. “The Grammar of Depiction: Exploring Gesture and Language in Australian Sign Language (Auslan).” PhD diss., Macquaire University.Search in Google Scholar
Frederiksen, Anne Therese. 2017. “Separating Viewpoint from Mode of Representation in Iconic Co-Speech Gestures: Insights from Danish Narratives.” Language and Cognition 9 (4): 677–708. 10.1017/langcog.2016.35.Search in Google Scholar
Frederiksen, Anne Therese. 2021. “Emerging ASL Distinctions in Sign-Speech Bilinguals’ Signs and Co-Speech Gestures in Placement Descriptions.” Frontiers in Psychology 12: 686485. 10.3389/fpsyg.2021.686485.Search in Google Scholar
Glück, Susanne and Roland Pfau. 1998. “On Classifying Classification as a Class of Inflection.” In Sixth Annual Conference of the Student Organization of Linguistics in Europe (ConSOLE) 5, edited by Tina Cambier-Langeveld, Anikó Lipták, and Michael Redford, 59–74. Leiden: SOLE. https://www.researchgate.net/publication/249730615_On_classifying_classification_as_a_class_of_inflection_in_German_Sign_Language (accessed 9/19/24).Search in Google Scholar
Gökgöz, Kadir. 2024. “Verbal Classifiers from a Crosslinguistic and Cross-Modal Point of View.” Language 100 (2): 179–217. 10.1353/lan.2024.a929735.Search in Google Scholar
Grose, Donovan, Ronnie B. Wilbur, and Katharina Schalber. 2007. “Events and Telicity in Classifier Predicates: A Reanalysis of Body Part Classifier Predicates in ASL.” Lingua 117 (7): 1258–84. 10.1016/j.lingua.2005.06.014.Search in Google Scholar
Gullberg, Marianne. 2009. “Reconstructing Verb Meaning in a Second Language: How English Speakers of L2 Dutch Talk and Gesture about Placement.” Annual Review of Cognitive Linguistics 7: 221–244. 10.1075/arcl.7.09gul.Search in Google Scholar
He, Jia. 2020. “Classifier Realization in Hong Kong Sign Language, Beijing Sign Language and Tianjin Sign Language.” PhD diss., Chinese University of Hong Kong.Search in Google Scholar
Hou, Lynn. 2018. “Iconic Patterns in San Juan Quiahije Chatino Sign Language.” Sign Language Studies 18 (4): 570–611. 10.1353/sls.2018.0017.Search in Google Scholar
Hwang, So-One, Nozomi Tomita, Hope Morgan, Rabia Ergin, Deniz İLkbaşaran, Sharon Seegers, Ryan Lepic, and Carol Padden. 2017. “Of the Body and the Hands: Patterned Iconicity for Semantic Categories.” Language and Cognition 9 (4): 573–602. 10.1017/langcog.2016.28.Search in Google Scholar
Janzen, Terry. 2004. “Space Rotation, Perspective Shift, and Verb Morphology in ASL.” Cognitive Linguistics 15 (2): 149–74. 10.1515/cogl.2004.006.Search in Google Scholar
Kayabaşı, Demet and Kadir Gökgöz. 2023. “The Causative-Inchoative Alternation and Age-of-Acquisition Effects on Multi-Predicate Constructions in Turkish Sign Language.” Language Learning and Development 19 (2): 125–50. 10.1080/15475441.2022.2047690.Search in Google Scholar
Kegl, Judy A. 1990. “Predicate Argument Structure and Verb-Class Organization in the ASL Lexicon.” In Sign Language Research: Theoretical Issues, edited by Ceil Lucas, 149–75. Washington, D.C.: Gallaudet University Press.Search in Google Scholar
Kimmelman, Vadim, Vanja De Lint, Connie De Vos, Marloes Oomen, Roland Pfau, Lianne Vink, and Enoch O. Aboh. 2019. “Argument Structure of Classifier Predicates: Canonical and Non-Canonical Mappings in Four Sign Languages.” Open Linguistics 5 (1): 332–53. 10.1515/opli-2019-0018.Search in Google Scholar
Kimmelman, Vadim, Anna Klezovich, and George Moroz. 2018. “IPSL: A Database of Iconicity Patterns in Sign Languages. Creation and Use.” In Proceedings of the Eleventh International Conference on Language Resources and Evaluation (LREC 2018), edited by N. Calzolari, K. Choukri, C. Cieri, T. Declerck, S. Goggi, K. Hasida, and T. Tokunaga. Miyazaki: ELRA.Search in Google Scholar
Kimmelman, Vadim, Roland Pfau, and Enoch O. Aboh. 2020. “Argument Structure of Classifier Predicates in Russian Sign Language.” Natural Language & Linguistic Theory 38 (2): 539–79. 10.1007/s11049-019-09448-9.Search in Google Scholar
Kubuş, Okan. 2008. “An Analysis of Turkish Sign Language (TİD) Phonology and Morphology.” MA thesis. MA, Middle East Technical University.Search in Google Scholar
Liddell, Scott K. 2003. Grammar, Gesture, and Meaning in American Sign Language. Cambridge, MA: Cambridge University Press.10.1017/CBO9780511615054Search in Google Scholar
Lillo-Martin, Diane. 1986. “Two Kinds of Null Arguments in American Sign Language.” Natural Language and Linguistic Theory 4 (4): 415–44. 10.1007/BF00134469.Search in Google Scholar
de Lint, Vanja. 2010. “Argument Structure in Classifier Constructions in ASL: An Experimental Approach.” MA thesis, Universiteit Utrecht.Search in Google Scholar
de Lint, Vanja. 2018. “NGT Classifier Constructions: An Inventory of Arguments.” Sign Language & Linguistics 21 (1): 3–39. 10.1075/sll.00011.lin.Search in Google Scholar
McDonald, Betsy H. 1982. “Aspects of the American Sign Language Predicate System.” PhD diss., SUNY Buffalo.Search in Google Scholar
Nyst, Victoria. 2007. A Descriptive Analysis of Adamorobe Sign Language (Ghana). LOT 151. Utrecht: LOT.Search in Google Scholar
Nyst, Victoria. 2016. “Size and Shape Depictions in the Manual Modality: A Taxonomy of Iconic Devices in Adamorobe Sign Language.” Semiotica 2016 (210): 75–104. 10.1515/sem-2016-0049.Search in Google Scholar
Nyst, Victoria. 2018. “Cross-Linguistic Variation in Space-Based Distance for Size Depiction in the Lexicons of Six Sign Languages.” Sign Language & Linguistics 21 (2): 350–79. 10.1075/sll.00024.nys.Search in Google Scholar
Nyst, Victoria, Marta Morgado, Timothy Mac Hadjah, Marco Nyarko, Mariana Martins, Lisa Van Der Mark, Evans Burichani, et al. 2022. “Object and Handling Handshapes in 11 Sign Languages: Towards a Typology of the Iconic Use of the Hands.” Linguistic Typology 26 (3): 573–604. 10.1515/lingty-2021-0026.Search in Google Scholar
Ortega, Gerardo, Beyza Sümer, and Aslı Özyürek. 2017. “Type of Iconicity Matters in the Vocabulary Development of Signing Children.” Developmental Psychology 53 (1): 89–99. 10.1037/dev0000161.Search in Google Scholar
Padden, Carol. 1988. “Interaction of Morphology and Syntax in American Sign Language.” Garland.Search in Google Scholar
Padden, Carol A., Irit Meir, So-One Hwang, Ryan Lepic, Sharon Seegers, and Tory Sampson. 2013. “Patterned Iconicity in Sign Language Lexicons.” Gesture 13 (3): 287–308. 10.1075/gest.13.3.03pad.Search in Google Scholar
Padden, Carol, So‐One Hwang, Ryan Lepic, and Sharon Seegers. 2015. “Tools for Language: Patterned Iconicity in Sign Language Nouns and Verbs.” Topics in Cognitive Science 7 (1): 81–94. 10.1111/tops.12121.Search in Google Scholar
Pavlič, Matic. 2016. “The Word Order Parameter in Slovenian Sign Language: Transitive, Ditransitive, Classifier and Locative Constructions.” PhD diss., Università Ca’Foscari.Search in Google Scholar
Perniss, Pamela M. 2007. “Achieving Spatial Coherence in German Sign Language Narratives: The Use of Classifiers and Perspective.” Lingua 117 (7): 1315–38. 10.1016/j.lingua.2005.06.013.Search in Google Scholar
Perniss, Pamela M. and Asli Özyürek. 2008. “Representations of Action, Motion and Location in Sign Space: A Comparison of German (DGS) and Turkish (TID) Sign Language Narratives.” In Signs of the Time: Selected Papers from TISLR 8, edited by Josep Quer, 353–76. Seedorf: Signum Press.Search in Google Scholar
Sandler, Wendy and Diane Lillo-Martin. 2006. Sign Language and Linguistic Universals. Cambridge: Cambridge University Press.10.1017/CBO9781139163910Search in Google Scholar
Schick, Brenda S. 1987. “The Acquisition of Classifier Predicates in American Sign Language.” PhD diss., Purdue University.Search in Google Scholar
Schembri, Adam. 2003. “Rethinking ‘classifiers’ in signed languages.” In Perspectives on classifier constructions in sign languages, edited by Karen Emmorey., 13–44. New York: Psychology Press.Search in Google Scholar
Sevgi, Hande and Kadir Gökgöz. 2023. “Classifiers, Argument Expression, and Age of Acquisition Effects in Turkish Sign Language (TİD).” Sign Language & Linguistics 26 (1): 1–36. 10.1075/sll.21006.sev.Search in Google Scholar
Shepard-Kegl, Judy A. 1985. “Locative Relations in American Sign Language Word Formation, Syntax, and Discourse.” PhD diss., MIT.10.1163/9789004373150_013Search in Google Scholar
Supalla, Ted R. 1982. “Structure and Acquisition of Verbs and Motion and Location in American Sign Language.” PhD diss., University of California, San Diego.Search in Google Scholar
Wittenburg, Peter, Hennie Brugman, Albert Russel, Alex Klassmann, and Han Sloetjes. 2006. “ELAN: A Professional Framework for Multimodality Research.” In Proceedings of the 5th International Conference on Language Resources and Evaluation (LREC), 1556–59.Search in Google Scholar
Wulf, Alyssa, Paul Dudis, Robert Bayley, and Ceil Lucas. 2002. “Variable Subject Presence in ASL Narratives.” Sign Language Studies 3 (1): 54–76. 10.1353/sls.2002.0027.Search in Google Scholar
Zwitserlood, Inge. 2003. Classifying Hand Configurations in Netherlandse Gebarentaal (Sign Language of the Netherlands). LOT 78. Utrecht: LOT.Search in Google Scholar
Zwitserlood, Inge. 2012. “Classifiers.” In Sign Language: An International Handbook, edited by Roland Pfau, Markus Steinbach, and Bencie Woll, 158–86. Berlin, Boston: De Gruyter Mouton. 10.1515/9783110261325.158.Search in Google Scholar
© 2025 the author(s), published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Research Articles
- No three productions alike: Lexical variability, situated dynamics, and path dependence in task-based corpora
- Individual differences in event experiences and psychosocial factors as drivers for perceived linguistic change following occupational major life events
- Is GIVE reliable for genealogical relatedness? A case study of extricable etyma of GIVE in Huī Chinese
- Borrowing or code-switching? Single-word English prepositions in Hong Kong Cantonese
- Stress and epenthesis in a Jordanian Arabic dialect: Opacity and Harmonic Serialism
- Can reading habits affect metaphor evaluation? Exploring key relations
- Acoustic properties of fricatives /s/ and /∫/ produced by speakers with apraxia of speech: Preliminary findings from Arabic
- Translation strategies for Arabic stylistic shifts of personal pronouns in Indonesian translation of the Quran
- Colour terms and bilingualism: An experimental study of Russian and Tatar
- Argumentation in recommender dialogue agents (ARDA): An unexpected journey from Pragmatics to conversational agents
- Toward a comprehensive framework for tonal analysis: Yangru tone in Southern Min
- Variation in the formant of ethno-regional varieties in Nigerian English vowels
- Cognitive effects of grammatical gender in L2 acquisition of Spanish: Replicability and reliability of object categorization
- Interaction of the differential object marker pam with other prominence hierarchies in syntax in German Sign Language (DGS)
- Modality in the Albanian language: A corpus-based analysis of administrative discourse
- Theory of ecology of pressures as a tool for classifying language shift in bilingual communities
- BSL signers combine different semiotic strategies to negate clauses
- Embodiment in colloquial Arabic proverbs: A cognitive linguistic perspective
- Voice quality has robust visual associations in English and Japanese speakers
- The cartographic syntax of Lai in Mandarin Chinese
- Rhetorical questions and epistemic stance in an Italian Facebook corpus during the COVID-19 pandemic
- Sentence compression using constituency analysis of sentence structure
- There are people who … existential-attributive constructions and positioning in Spoken Spanish and German
- The prosodic marking of discourse functions: German genau ‘exactly’ between confirming propositions and resuming actions
- Special Issue: Request for confirmation sequences across ten languages, edited by Martin Pfeiffer & Katharina König - Part II
- Request for confirmation sequences in Castilian Spanish
- A coding scheme for request for confirmation sequences across languages
- Special Issue: Classifier Handshape Choice in Sign Languages of the World, coordinated by Vadim Kimmelman, Carl Börstell, Pia Simper-Allen, & Giorgia Zorzi
- Classifier handshape choice in Russian Sign Language and Sign Language of the Netherlands
- Formal and functional factors in classifier choice: Evidence from American Sign Language and Danish Sign Language
- Choice of handshape and classifier type in placement verbs in American Sign Language
- Somatosensory iconicity: Insights from sighted signers and blind gesturers
- Diachronic changes the Nicaraguan sign language classifier system: Semantic and phonological factors
- Depicting handshapes for animate referents in Swedish Sign Language
- A ministry of (not-so-silly) walks: Investigating classifier handshapes for animate referents in DGS
- Choice of classifier handshape in Catalan Sign Language: A corpus study
Articles in the same Issue
- Research Articles
- No three productions alike: Lexical variability, situated dynamics, and path dependence in task-based corpora
- Individual differences in event experiences and psychosocial factors as drivers for perceived linguistic change following occupational major life events
- Is GIVE reliable for genealogical relatedness? A case study of extricable etyma of GIVE in Huī Chinese
- Borrowing or code-switching? Single-word English prepositions in Hong Kong Cantonese
- Stress and epenthesis in a Jordanian Arabic dialect: Opacity and Harmonic Serialism
- Can reading habits affect metaphor evaluation? Exploring key relations
- Acoustic properties of fricatives /s/ and /∫/ produced by speakers with apraxia of speech: Preliminary findings from Arabic
- Translation strategies for Arabic stylistic shifts of personal pronouns in Indonesian translation of the Quran
- Colour terms and bilingualism: An experimental study of Russian and Tatar
- Argumentation in recommender dialogue agents (ARDA): An unexpected journey from Pragmatics to conversational agents
- Toward a comprehensive framework for tonal analysis: Yangru tone in Southern Min
- Variation in the formant of ethno-regional varieties in Nigerian English vowels
- Cognitive effects of grammatical gender in L2 acquisition of Spanish: Replicability and reliability of object categorization
- Interaction of the differential object marker pam with other prominence hierarchies in syntax in German Sign Language (DGS)
- Modality in the Albanian language: A corpus-based analysis of administrative discourse
- Theory of ecology of pressures as a tool for classifying language shift in bilingual communities
- BSL signers combine different semiotic strategies to negate clauses
- Embodiment in colloquial Arabic proverbs: A cognitive linguistic perspective
- Voice quality has robust visual associations in English and Japanese speakers
- The cartographic syntax of Lai in Mandarin Chinese
- Rhetorical questions and epistemic stance in an Italian Facebook corpus during the COVID-19 pandemic
- Sentence compression using constituency analysis of sentence structure
- There are people who … existential-attributive constructions and positioning in Spoken Spanish and German
- The prosodic marking of discourse functions: German genau ‘exactly’ between confirming propositions and resuming actions
- Special Issue: Request for confirmation sequences across ten languages, edited by Martin Pfeiffer & Katharina König - Part II
- Request for confirmation sequences in Castilian Spanish
- A coding scheme for request for confirmation sequences across languages
- Special Issue: Classifier Handshape Choice in Sign Languages of the World, coordinated by Vadim Kimmelman, Carl Börstell, Pia Simper-Allen, & Giorgia Zorzi
- Classifier handshape choice in Russian Sign Language and Sign Language of the Netherlands
- Formal and functional factors in classifier choice: Evidence from American Sign Language and Danish Sign Language
- Choice of handshape and classifier type in placement verbs in American Sign Language
- Somatosensory iconicity: Insights from sighted signers and blind gesturers
- Diachronic changes the Nicaraguan sign language classifier system: Semantic and phonological factors
- Depicting handshapes for animate referents in Swedish Sign Language
- A ministry of (not-so-silly) walks: Investigating classifier handshapes for animate referents in DGS
- Choice of classifier handshape in Catalan Sign Language: A corpus study