Persistence landscapes of affine fractals
-
Michael J. Catanzaro


Abstract
We develop a method for calculating the persistence landscapes of affine fractals using the parameters of the corresponding transformations. Given an iterated function system of affine transformations that satisfies a certain compatibility condition, we prove that there exists an affine transformation acting on the space of persistence landscapes, which intertwines the action of the iterated function system. This latter affine transformation is a strict contraction and its unique fixed point is the persistence landscape of the affine fractal. We present several examples of the theory as well as confirm the main results through simulations.
1 Introduction
Affine fractals are the invariant set of an iterated function system (IFS) consisting of affine transformations acting on Euclidean space. Well-known examples of such fractals are Cantor sets and Mandelbrojt sets. Affine fractals, as subsets of Euclidean space, possess topological properties that can be extracted through the methods of algebraic topology. In particular, these subsets of Euclidean space can be associated with a persistence landscape [1], which is a sequence of functions that encode geometric properties of the set based on Euclidean distances. These distances give rise to a family of homology groups derived from a filtration of complexes. The homology groups in turn produce a persistence module from which the persistence landscapes are defined.
Interest in studying fractals using the tools of algebraic topology has occurred recently. In [2], it was shown that persistence homology can be used to distinguish fractals of the same Hausdorff dimension. In [3], the authors describe a relationship between the Hausdorff dimension of fractals and the persistence intervals of Betti numbers.
Our main result (Theorem 4) concerns the calculation of the persistence diagrams and landscapes of affine fractals. We prove that, under a certain compatibility condition, there exists an affine transformation
1.1 Persistence landscapes
Persistent homology is a relatively new approach to studying topological spaces. In the context of data science, persistent homology can be applied to a data set to complement traditional statistical approaches by studying the geometry of the data. We employ the tools of persistent homology, including persistence landscapes, to analyze affine fractals.
Persistent homology typically begins with a set of points, equipped with a pairwise notion of distance. We place a metric ball of radius
The data of changing topological properties are conveniently summarized in what is known as a persistence diagram, a multiset of points in the plane. If we focus on loops of the union, then each point
Unfortunately, however, barcodes do not possess a vector space structure, and so the quantitative analysis and precise comparison can be difficult [5]. To remedy this, we map the barcodes to some feature space (a Banach space in our case) using a well-studied feature map known as a persistence landscape. The mapping from barcodes to landscapes is reversible, and so this vectorization scheme loses no information [1]. Persistence landscapes have been used to study protein binding [6], phase transitions [7], audio signals [8], and microstructures in materials science [9].
See Section 2 for a full discussion of persistent homology and persistence landscapes of metric spaces.
1.2 Affine fractals
A fractal, for our purposes, is a set that has a self-similarity property. The middle-third Cantor set is the canonical example of a self-similar set. Fractals are commonly studied objects in many contexts. Cantor sets, in particular, appear in the context of analysis [10,11], number theory [12,13], probability [14,15,16], geometry [17,18], physics [19,20,21], and harmonic analysis [22,23,24].
In this paper, we consider specifically the class of affine fractals, which are generated by iterated function systems consisting of affine transformations. By this, we mean that the fractal is the invariant set for the iterated function system.
Definition 1
Suppose
For the maps
In [25], Hutchinson laid out the main relationship between fractals and iterated function systems (IFS); this relationship is the foundation of our results. Recall that
The Lipschitz constant of
Theorem A
Let
Furthermore, A is compact and is the closure of the set of fixed points of finite compositions of members of
Recall that the Hausdorff distance between two sets
For us, the maps
The classical middle-third Cantor set in
The Sierpinski gasket in
The Sierpinski carpet in
The Menger sponge (or Sierpinski cube) in
Specifically, the Cantor set is the invariant set for the IFS with generators
Likewise, the Sierpinski carpet is the invariant set for the IFS with generators
For an IFS
One of our main results is to prove that for a fixed affine IFS
 (1)
(1)
Here,
for any initialization
2 Persistent homology
In this section, we briefly review some standard facts from algebraic topology and persistent homology as well as establish our notation. Excellent resources for (simplicial) homology can be found in [26,27], and [4,28,29] provide a good introduction to persistent homology.
2.1 Simplicial complexes
For a simplicial complex
Given two simplicial complexes
where
The first step in our goal of computing topological properties of affine fractals will be to construct their Cěch complexes. If
where
There is another popular variant in persistent homology for associating a topological space with a set, known as the Vietoris-Rips complex. The Vietoris-Rips complex for
In comparing equations (3) and (4), we see that the 1-simplices in
Our focus will be on the
2.2 A review of homology
Given a simplicial complex
where
with the essential property that any two successive compositions equal the trivial map:
Definition 2
The p
th simplicial homology group of a simplicial complex
We let
Moving forward, we assume
For simplicial complexes
and extend the homomorphism to the rest of
Lemma 1
Let
A particularly nice feature of homology groups is that the homology group of a space is isomorphic to the direct sum of the homology groups of the path components [26, Prop. 2.6]. This directly leads to the following lemma.
Lemma 2
Let
Then for all dimensions
Lemma 2 implies that given a finite point cloud and a collection of similitudes, so long as the images of the point cloud under those similitudes are sufficiently far apart, the homology group resulting from the union of those images is easily related to the homology groups resulting from the original point cloud.
Another tool we will use for the computation of homology groups is known as the Mayer-Vietoris sequence. Suppose
For a detailed explanation of the maps in the sequence and a proof of its exactness, see [27, Chapter 3].
2.3 Persistent homology
A simplicial filtration
The inclusion map
Understanding the structure of persistent homology is difficult as presented. Instead, we turn to a generalization of this structure known as a persistence module. A persistence module is a collection of
We will often refer to the persistence module
If
form a simplicial filtration of
for
A persistence diagram is a multiset of birth and death times derived from a decomposition of a persistence module. Interval modules form the basic building blocks of persistence modules. Interval modules are indecomposable. In [33], it was shown that the persistence module
and we define the persistence diagram of
where
We will denote a persistence diagram as
To ensure that the persistence modules we consider have a decomposition into interval modules, we require that
Definition 3
The persistence module
Assuming a persistence module is q-tame guarantees us not only a well-defined persistence diagram, but also stability with respect to the bottleneck distance [36]. A prior stability result was presented by Cohen-Steiner et al. in [37], which required a more restrictive tameness condition.
Persistence modules resulting from a Cěch filtration built on a finite point cloud
Proposition 1
For any affine iterated function system, the invariant set
While persistence diagrams are an effective representation of a persistence module, they are not conducive to statistical analysis. Persistence landscapes address this issue by embedding persistence diagrams into a Banach space. Given a persistence module
where
We compute the distance between two persistence landscapes using the standard norm on
There is an alternative definition given in [39] that allows us to relate the persistence landscape of
and for all
We use
It is common for many stability results to write the distance between two persistence landscapes in terms of their corresponding persistence modules. If
By combining the stability results from [1,38,36], we obtain the following:
Theorem B
Suppose X is a metric space, and
Corollary 1
Let
where
3 The persistence landscapes of affine fractals
3.1 The persistence landscape of the Cantor set
We begin with calculating the persistence landscape of the middle-third Cantor set
For convenience, we suppose that
We also define
The length of each closed interval in
As a consequence of this and Lemma 2.3, we obtain the following convergence result.
Theorem 1
Let
Knowing that the limit exists, we would still like to have a formula for the persistence landscape of
To describe persistence landscapes, we will use the hat functions defined in equation (11). Recall that persistence landscapes
We define
We adopt the convention that the maximum death time will be equal to the diameter of the invariant set, which in the case of
and then we see that
Theorem 2
Let
In other words, the commutative diagram in equation (1) holds.
Proof
For
By the definition of
as depicted in Figure 1. For all
Since
Let
We claim that for
 (17)
(17)
commutes, where
On the other hand,
Therefore,
To prove the first claim, suppose
For
For
Thus, for every class
It follows from our claim that
and
By (16), we also see that
and
Applying the definition in (12), we see that
Since
Therefore,

Since
We illustrate this landscape in Figure 2 (produced by pyscapes [40]).

Graph of the functions
We see from the illustration that the persistence landscape exhibits its own version of self-similarity. This is a reflection of the fact that the fractal contains several scaled copies of itself. Indeed, since scaling a subset of Euclidean space results in a proportional scaling of its persistence landscape, we should expect the persistence landscape of a fractal to contain a subsequence, which is a scaled copy of itself. The number of scaled copies, which corresponds to the number of generators of the IFS, is also reflected as a multiplicity in the persistence landscape.
3.2 Affine fractals with well-separated images and extreme points
The proof of Theorem 2 suggests that a more general result exists for an IFS satisfying certain properties. The two main ingredients that enable our calculations in the proof include (1) a judicious choice for the initial approximation
We let
Since the maps in
Lemma 3
Suppose
Proof
Let
If
and for any
Since
in the Hausdorff metric. We claim that
Since
By definition, this implies
For any
One key property of
Definition 4
Let
This definition may apply to any IFS, not only those of the form given in equation (19). Note that on the left-hand side of the inequality, we have the usual Euclidean distance, not the Hausdorff distance.
3.3 Main results
By using the well-separated condition and the ideas in Section 3.1, we are now ready to elucidate the relationship between an IFS and the persistence landscape of its invariant set in more generality. Our main focus is on IFS with well-separated images having the form in equation (19), but many of the following results do not require these assumptions. We will use the same two-step approach that we used with
Theorem 3
Let
Then, for any
We remark that the statement of Theorem 3 only mentions the Cěch filtration, which applies to any dimension of homology. Also note that the hypothesis makes no assumptions on
Having established that there is a sequence of persistence landscapes that converge to the persistence landscape of the invariant set, we now seek a contraction on
Proposition 2
Let
Proof
Choose
Thus,
In light of equation (22), (c) follows from (a). Similarly, (d) follows from (b).□
Definition 5
For a disconnected set
We let
Note that
If we assume
by letting
We will make use of the fact that when
This also means that
Proposition 3
Suppose
Proof
Suppose first that
Since
For the other inequality, suppose now that
Therefore,
This implies that
By using the distances as defined in equation (23), we define
Theorem 4
Let
Proof
Let
Choose
Looking at the definition of
Similarly,
Now our goal is to bound
Note that we use the convention
Let
Since
We know that for all
On the other hand, we have
Thus, we have
From this isomorphism, we can see that for
where
By definition, we have for all
If
On the other hand, for any
Combining equations (30) and (31), we see that for
If
By convention,
Putting everything together, we have established that
This means we can compute
Putting our three bounds together with equation (26), we have
Taking the limit as
Now that we have identified a contraction on
Looking back at equation (18), since we had
By using division, we find
We consider two cases. First, if
According to equation (33), this means
Thus,
In the case of
Since
To make things easier, we consider two subcases. If
Hence,
Thus,
Knowing that equation (33) is the correct formula for the persistence landscape for
Theorem 4 applies to all IFS, which satisfy the well-separated condition, but it is not as strong of a result as Theorem 2. For that, we need an additional assumption on the IFS.
Theorem 5
Let
Let
In other words, the commutative diagram in equation (1) holds.
Proof
Let
For the case
For the other
Indeed, if
Equation (34) implies that for all
In addition,
It now follows that
Now let
By the same reasoning as in the proof of Theorem 4
and by the definition of
3.4 Special case: dimension one
Here, we assume
From Lemma 3, we know that the extreme points of the
Also, for
For each
This is equivalent to
It is also straightforward to compute
Proposition 4
Let
Proof
For convenience, let
Our assumption also implies that
a contradiction. Since
Conversely, if
We consider two cases, first, if
This implies that each image
we may repeat the counting of connected components as described in the previous paragraph. We start with the count at
It follows from the claim that
Now we are ready to state the main consequence of Theorem 4 for IFS on
Corollary 2
Let
Moreover, if equation (42) holds and
where
Proof
As reasoned earlier,
4 Examples
We are now ready to present a series of examples of iterated function systems and the corresponding persistence landscapes resulting from the invariant set. Our goal is to illustrate the relationship between the persistence landscape and the IFS. Some of our examples will have well-separated images, meaning that we can readily apply the results mentioned earlier to compute the persistence landscape of
4.1 Right 1/3 Cantor set
Consider the IFS
In this case, we have
Clearly,
By Corollary 2, this means the persistence landscape of
4.2 1/5 Cantor set
Consider the IFS
In this case, we have
Clearly,
By Corollary 2, this means that the persistence landscape of
4.3 1/6 Cantor set
Consider the IFS
In this case, we have
We compute
By Corollary 2, this means that the persistence landscape of
4.4 Modified 1/5 Cantor set
Let
In this case,
satisfies
It follows from Lemma 3 that
We claim that for all
Thus,
To compute
Also, it is clear that for
From the Mayer-Vietoris sequence, we have the following exact sequence:
Since
Exactness implies that
Since
Since

The three subcomplexes in the modified 1/5 Cantor set for
Now we may argue as we did for Theorem 4. For
On the other hand, for
This proves the claim that
From Theorem A, we know that
as claimed.
To obtain the formula for
We illustrate this landscape in Figure 4 (produced by pyscapes [40]).

Graph of the functions
4.5 Cantor triangle
Let us consider a two-dimensional example. Consider the IFS on
with
Despite this, the formula in equation (33) still applies. To see why, define
Note that as in equation (33), we have
Define a sequence of sets
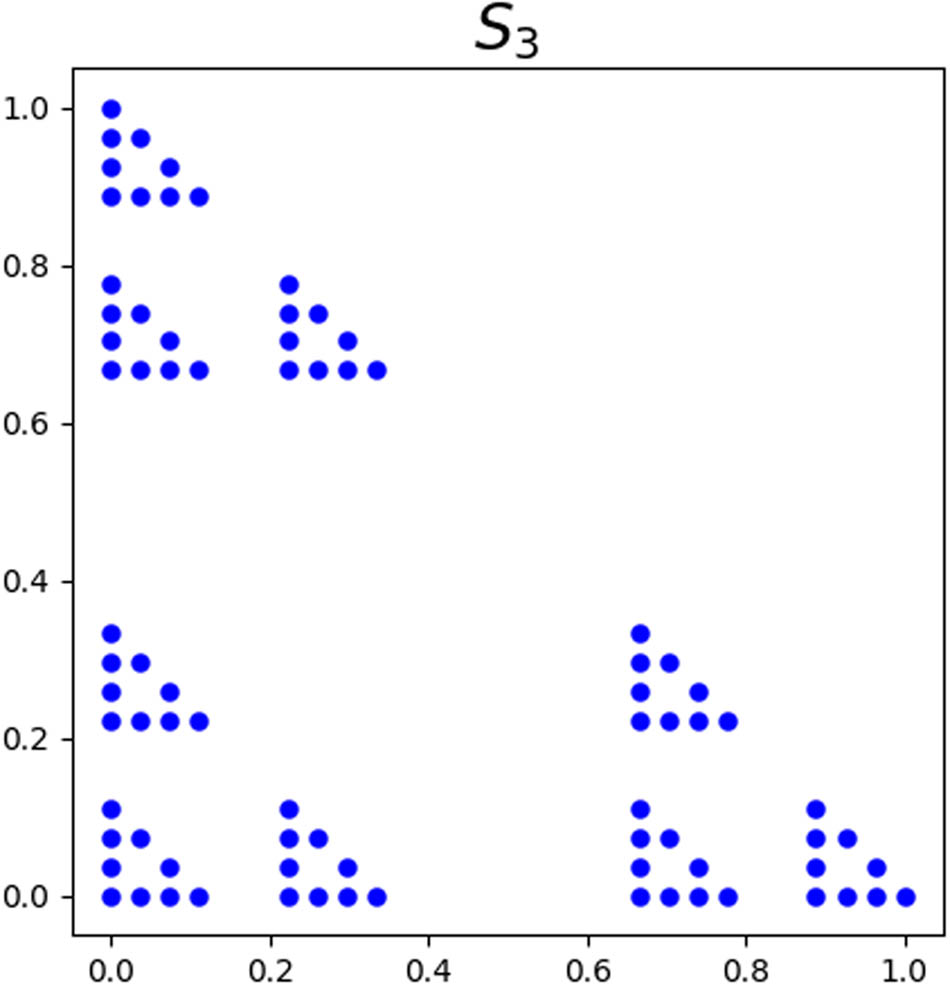
An illustration of
Indeed, choose
To compute
and for
and it follows from Lemma 2 that
Since every nontrivial transformation in
On the other hand, for
This proves the claim that
When we compute the fixed point of
4.6 Distorted Sierpinksi Carpet
Consider another IFS on
Even though we cannot apply Theorem 4 directly, we can derive the formula for
satisfies
To prove this, we take
Let
To prove that
Therefore, for
and for
To compute
and for
and it follows from Lemma 2 that
As in the previous example, this isomorphism implies (51). Using identical reasoning as in the previous section, this implies that for
Thus,
We compute the formula for
In terms of equation (33), we have
4.7 Remarks
The 1/5 Cantor set in 4.4 demonstrates how a reasonable formula for the persistence landscape of
The final two examples demonstrate that at least for zero-dimensional homology, the well-separated assumption can be too restrictive. We might be better off replacing the well-separated hypothesis with the assumption that
since the proof of Theorem 4 seems to work as long each image becomes path connected by the time any two different images become path connected. However, the well-separated assumption might be necessary for finding the persistence landscape for
-
Funding information: Michael J. Catanzaro, Lee Przybylski, and Eric S. Weber were supported in part by the National Science Foundation under award #1934884. Lee Przybylski and Eric S. Weber were supported in part by the National Science Foundation and the National Geospatial Intelligence Agency under award #1830254.
-
Author contributions: All authors have accepted responsibility for the entire content of this manuscript and approved its submission.
-
Conflict of interest: Eric Weber is a member of the Editorial Board of Demonstratio Mathematica and was not involved in the review process of this article.
-
Data availability statement: Code for generating persistence landscapes using pyscapes is available here: github.com/catanzaromj/PL_fractal. No other data were generated during the study.
References
[1] P. Bubenik, Statistical topological data analysis using persistence landscapes, J. Machine Learn. Res. 16 (2015), no. 1, 77–102. Search in Google Scholar
[2] V. Robins, Computational topology at multiple resolutions: foundations and applications to fractals and dynamics, Ph.D. thesis, University of Colorado, 2000. Search in Google Scholar
[3] G. Máté and D. W. Heermann, Persistence intervals of fractals, Phys. A Statist. Mech. Appl. 405 (2014), 252–259. 10.1016/j.physa.2014.03.037Search in Google Scholar
[4] G. Carlsson, A. Zomorodian, A. Collins, and L. J. Guibas, Persistence barcodes for shapes, Int. J. Shape Model. 11 (2005), no. 2, 149–187. 10.1145/1057432.1057449Search in Google Scholar
[5] E. Munch, K. Turner, P. Bendich, S. Mukherjee, J. Mattingly, and J. Harer, Probabilistic Fréchet means for time varying persistence diagrams, Electron. J. Statistic. 9 (2015), no. 1, 1173–1204. 10.1214/15-EJS1030Search in Google Scholar
[6] V. Kovacev-Nikolic, P. Bubenik, D. Nikolic, and G. Heo, Using persistent homology and dynamical distances to analyze protein binding, Statistic. Appl. Genetics Mol. Biol. 15 (2016), no. 1, 19–38. 10.1515/sagmb-2015-0057Search in Google Scholar PubMed
[7] I. Donato, M. Gori, M. Pettini, G. Petri, S. De Nigris, R. Franzosi, et al., Persistent homology analysis of phase transitions, Phys. Rev. E 93 (2016), no. 5, 052138. 10.1103/PhysRevE.93.052138Search in Google Scholar PubMed
[8] J.-Y. Liu, S.-K. Jeng, and Y.-H. Yang, Applying topological persistence in convolutional neural network for music audio signals, 2016, arXiv: http://arXiv.org/abs/arXiv:1608.07373. Search in Google Scholar
[9] P. Dlotko and T. Wanner, Topological microstructure analysis using persistence landscapes, Phys. D 334 (2016), 60–81. 10.1016/j.physd.2016.04.015Search in Google Scholar
[10] G. Cantor, De la puissance des ensembles parfaits de points, Acta Math. 4 (1884), no. 1, 381–392. 10.1007/BF02418423Search in Google Scholar
[11] R. S. Strichartz, Analysis on fractals, Notices Amer. Math. Soc. 46 (1999), no. 10, 1199–1208. Search in Google Scholar
[12] J. W. S. Cassels, On a problem of Steinhaus about normal numbers, Colloq. Math. 7 (1959), 95–101. 10.4064/cm-7-1-95-101Search in Google Scholar
[13] W. M. Schmidt, Über die Normalität von Zahlen zu verschiedenen Basen, Acta Arith. 7 (1961/1962), 299–309. 10.4064/aa-7-3-299-309Search in Google Scholar
[14] R. Lyons and Y. Peres, Probability on Trees and Networks, Cambridge Series in Statistical and Probabilistic Mathematics, Cambridge University Press, New York, 2017. 10.1017/9781316672815Search in Google Scholar
[15] P. E. T. Jorgensen, Analysis and Probability: Wavelets, Signals, Fractals, Graduate Texts in Mathematics, vol. 234, Springer, New York, 2006. Search in Google Scholar
[16] A. Byars, E. Camrud, S. N. Harding, S. McCarty, K. Sullivan, and E. S. Weber, Sampling and interpolation of cumulative distribution functions of Cantor sets in [0, 1], Dem. Math. 54 (2021), 85–109. 10.1515/dema-2021-0010Search in Google Scholar
[17] A. D. Pollington, The Hausdorff dimension of a set of normal numbers. II, J. Austral. Math. Soc. Ser. A 44 (1988), no. 2, 259–264. 10.1017/S1446788700029840Search in Google Scholar
[18] Y. Peres and B. Solomyak, Self-similar measures and intersections of Cantor sets, Trans. Amer. Math. Soc. 350 (1998), no. 10, 4065–4087. 10.1090/S0002-9947-98-02292-2Search in Google Scholar
[19] C. Allain and M. Cloitre, Characterizing the lacunarity of random and deterministic fractal sets, Phys. Rev. A 44 (1991), 3552–3558. 10.1103/PhysRevA.44.3552Search in Google Scholar PubMed
[20] B. Yu, M. Zou, and Y. Feng, Permeability of fractal porous media by Monte Carlo simulations, Int. J. Heat Mass Transf. 48 (2005), 2787–2794. 10.1016/j.ijheatmasstransfer.2005.02.008Search in Google Scholar
[21] B. Yu, Fractal dimensions for multiphase fractal media, Fractals 14 (2006), no. 2, 111–118. 10.1142/S0218348X06003155Search in Google Scholar
[22] P. E. T. Jorgensen and Steen Pedersen, Dense analytic subspaces in fractal L2-spaces, J. Anal. Math. 75 (1998), 185–228. 10.1007/BF02788699Search in Google Scholar
[23] R. S. Strichartz, Mock Fourier series and transforms associated with certain Cantor measures, J. Anal. Math. 81 (2000), 209–238. 10.1007/BF02788990Search in Google Scholar
[24] R. J. Ravier and R. S. Strichartz, Sampling theory with average values on the Sierpinski gasket, Constr. Approx. 44 (2016), no. 2, 159–194. 10.1007/s00365-016-9341-7Search in Google Scholar
[25] J. E. Hutchinson, Fractals and self similarity, Indiana Univ. Math. J. 30 (1981), no. 5, 713–747. 10.1512/iumj.1981.30.30055Search in Google Scholar
[26] A. Hatcher, Algebraic Topology, Cambridge University Press, Cambridge, 2002. Search in Google Scholar
[27] J. R Munkres, Elements of Algebraic Topology, Addison-Wesley Publishing Company, Boston, Massachusetts, United States, 1984. Search in Google Scholar
[28] H. Edelsbrunner and J. Harer, Computational Topology: An Introduction, American Mathematical Society, Providence, RI 2010. 10.1090/mbk/069Search in Google Scholar
[29] J. A. Perea, A brief history of persistence, 2018, arXiv:1809.03624 [cs, math]. Search in Google Scholar
[30] K. Borsuk, On the imbedding of systems of compacta in simplicial complexes, Fundamenta Math. 35 (1948), 217–234 (eng). 10.4064/fm-35-1-217-234Search in Google Scholar
[31] U. Bauer, Ripser: efficient computation of Vietoris–Rips persistence barcodes, J. Appl. Comput. Topology 5 (2021), no. 5, 391–423, DOI: https://doi.org/10.1007/s41468-021-00071-5.10.1007/s41468-021-00071-5Search in Google Scholar
[32] V. De Silva and R. Ghrist, Coverage in sensor networks via persistent homology, Algebraic Geometric Topol. 7 (2007), no. 1, 339–358. 10.2140/agt.2007.7.339Search in Google Scholar
[33] M. Bakke Botnan and W. Crawley-Boevey, Decomposition of persistence modules, Proc. Amer. Math. Soc. 148 (2020), 4581–4596, DOI: https://doi.org/10.1090/proc/14790.10.1090/proc/14790Search in Google Scholar
[34] G. Azumaya, Corrections and supplementaries to my paper concerning Krull-Remak-Schmidt’s theorem, Nagoya Math. J. 1 (1950), 117–124 (eng). 10.1017/S002776300002290XSearch in Google Scholar
[35] F. Chazal, V. de Silva, M. Glisse, and S. Oudot, The structure and stability of persistence modules, Springer Briefs in Mathematics, Springer, Cham, 2016. 10.1007/978-3-319-42545-0Search in Google Scholar
[36] F. Chazal, D. Cohen-Steiner, M. Glisse, L. J. Guibas, and S. Oudot, Proximity of persistence modules and their diagrams, Research report RR-6568, INRIA, 2008. 10.1145/1542362.1542407Search in Google Scholar
[37] D. Cohen-Steiner, H. Edelsbrunner, and J. Harer, Stability of persistence diagrams, Discrete Comput. Geometry 37 (2007), no. 1, 103–120. 10.1145/1064092.1064133Search in Google Scholar
[38] F. Chazal, V. de Silva, and S. Oudot, Persistence stability for geometric complexes, Geom. Dedicata 173 (2014), 193–214. 10.1007/s10711-013-9937-zSearch in Google Scholar
[39] P. Bubenik, The persistence landscape and some of its properties, Topological Data Analysis, Abel Symposia, Springer International Publishing, Cham, 2020, pp. 97–117 (eng). 10.1007/978-3-030-43408-3_4Search in Google Scholar
[40] G. Angeloro and M. J. Catanzaro, Pyscapes (version 0.1.0), https://github.com/gabbyangeloro/pyscapes. Search in Google Scholar
© 2022 Michael J. Catanzaro et al., published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Regular Articles
- On some summation formulas
- A study of a meromorphic perturbation of the sine family
- Asymptotic behavior of even-order noncanonical neutral differential equations
- Unconditionally positive NSFD and classical finite difference schemes for biofilm formation on medical implant using Allen-Cahn equation
- Starlike and convexity properties of q-Bessel-Struve functions
- Mathematical modeling and optimal control of the impact of rumors on the banking crisis
- On linear chaos in function spaces
- Convergence of generalized sampling series in weighted spaces
- Persistence landscapes of affine fractals
- Inertial iterative method with self-adaptive step size for finite family of split monotone variational inclusion and fixed point problems in Banach spaces
- Various notions of module amenability on weighted semigroup algebras
- Regularity and normality in hereditary bi m-spaces
- On a first-order differential system with initial and nonlocal boundary conditions
- On solving pseudomonotone equilibrium problems via two new extragradient-type methods under convex constraints
- Local linear approach: Conditional density estimate for functional and censored data
- Some properties of graded generalized 2-absorbing submodules
- Eigenvalue inclusion sets for linear response eigenvalue problems
- Some integral inequalities for generalized left and right log convex interval-valued functions based upon the pseudo-order relation
- More properties of generalized open sets in generalized topological spaces
- An extragradient inertial algorithm for solving split fixed-point problems of demicontractive mappings, with equilibrium and variational inequality problems
- An accurate and efficient local one-dimensional method for the 3D acoustic wave equation
- On a weighted elliptic equation of N-Kirchhoff type with double exponential growth
- On split feasibility problem for finite families of equilibrium and fixed point problems in Banach spaces
- Entire and meromorphic solutions for systems of the differential difference equations
- Multiplication operators on the Banach algebra of bounded Φ-variation functions on compact subsets of ℂ
- Mannheim curves and their partner curves in Minkowski 3-space E13
- Characterizations of the group invertibility of a matrix revisited
- Iterates of q-Bernstein operators on triangular domain with all curved sides
- Data analysis-based time series forecast for managing household electricity consumption
- A robust study of the transmission dynamics of zoonotic infection through non-integer derivative
- A Dai-Liao-type projection method for monotone nonlinear equations and signal processing
- Review Article
- Remarks on some variants of minimal point theorem and Ekeland variational principle with applications
- Special Issue on Recent Methods in Approximation Theory - Part I
- Coupled fixed point theorems under new coupled implicit relation in Hilbert spaces
- Approximation of integrable functions by general linear matrix operators of their Fourier series
- Sharp sufficient condition for the convergence of greedy expansions with errors in coefficient computation
- Approximation of conic sections by weighted Lupaş post-quantum Bézier curves
- On the generalized growth and approximation of entire solutions of certain elliptic partial differential equation
- Existence results for ABC-fractional BVP via new fixed point results of F-Lipschitzian mappings
- Linear barycentric rational collocation method for solving biharmonic equation
- A note on the convergence of Phillips operators by the sequence of functions via q-calculus
- Taylor’s series expansions for real powers of two functions containing squares of inverse cosine function, closed-form formula for specific partial Bell polynomials, and series representations for real powers of Pi
- Special Issue on Recent Advances in Fractional Calculus and Nonlinear Fractional Evaluation Equations - Part I
- Positive solutions for fractional differential equation at resonance under integral boundary conditions
- Source term model for elasticity system with nonlinear dissipative term in a thin domain
- A numerical study of anomalous electro-diffusion cells in cable sense with a non-singular kernel
- On Opial-type inequality for a generalized fractional integral operator
- Special Issue on Advances in Integral Transforms and Analysis of Differential Equations with Applications
- Mathematical analysis of a MERS-Cov coronavirus model
- Rapid exponential stabilization of nonlinear continuous systems via event-triggered impulsive control
- Novel soliton solutions for the fractional three-wave resonant interaction equations
- The multistep Laplace optimized decomposition method for solving fractional-order coronavirus disease model (COVID-19) via the Caputo fractional approach
- Special Issue on Problems, Methods and Applications of Nonlinear Analysis
- Some recent results on singular p-Laplacian equations
- Infinitely many solutions for quasilinear Schrödinger equations with sign-changing nonlinearity without the aid of 4-superlinear at infinity
- Special Issue on Recent Advances for Computational and Mathematical Methods in Scientific Problems
- Existence of solutions for a nonlinear problem at resonance
- Asymptotic stability of solutions for a diffusive epidemic model
- Special Issue on Computational and Numerical Methods for Special Functions - Part I
- Fully degenerate Bernoulli numbers and polynomials
- Wigner-Ville distribution and ambiguity function associated with the quaternion offset linear canonical transform
- Some identities related to degenerate Stirling numbers of the second kind
- Two identities and closed-form formulas for the Bernoulli numbers in terms of central factorial numbers of the second kind
- λ-q-Sheffer sequence and its applications
- Special Issue on Fixed Point Theory and Applications to Various Differential/Integral Equations - Part I
- General decay for a nonlinear pseudo-parabolic equation with viscoelastic term
- Generalized common fixed point theorem for generalized hybrid mappings in Hilbert spaces
- Computation of solution of integral equations via fixed point results
- Characterizations of quasi-metric and G-metric completeness involving w-distances and fixed points
- Notes on continuity result for conformable diffusion equation on the sphere: The linear case
Articles in the same Issue
- Regular Articles
- On some summation formulas
- A study of a meromorphic perturbation of the sine family
- Asymptotic behavior of even-order noncanonical neutral differential equations
- Unconditionally positive NSFD and classical finite difference schemes for biofilm formation on medical implant using Allen-Cahn equation
- Starlike and convexity properties of q-Bessel-Struve functions
- Mathematical modeling and optimal control of the impact of rumors on the banking crisis
- On linear chaos in function spaces
- Convergence of generalized sampling series in weighted spaces
- Persistence landscapes of affine fractals
- Inertial iterative method with self-adaptive step size for finite family of split monotone variational inclusion and fixed point problems in Banach spaces
- Various notions of module amenability on weighted semigroup algebras
- Regularity and normality in hereditary bi m-spaces
- On a first-order differential system with initial and nonlocal boundary conditions
- On solving pseudomonotone equilibrium problems via two new extragradient-type methods under convex constraints
- Local linear approach: Conditional density estimate for functional and censored data
- Some properties of graded generalized 2-absorbing submodules
- Eigenvalue inclusion sets for linear response eigenvalue problems
- Some integral inequalities for generalized left and right log convex interval-valued functions based upon the pseudo-order relation
- More properties of generalized open sets in generalized topological spaces
- An extragradient inertial algorithm for solving split fixed-point problems of demicontractive mappings, with equilibrium and variational inequality problems
- An accurate and efficient local one-dimensional method for the 3D acoustic wave equation
- On a weighted elliptic equation of N-Kirchhoff type with double exponential growth
- On split feasibility problem for finite families of equilibrium and fixed point problems in Banach spaces
- Entire and meromorphic solutions for systems of the differential difference equations
- Multiplication operators on the Banach algebra of bounded Φ-variation functions on compact subsets of ℂ
- Mannheim curves and their partner curves in Minkowski 3-space E13
- Characterizations of the group invertibility of a matrix revisited
- Iterates of q-Bernstein operators on triangular domain with all curved sides
- Data analysis-based time series forecast for managing household electricity consumption
- A robust study of the transmission dynamics of zoonotic infection through non-integer derivative
- A Dai-Liao-type projection method for monotone nonlinear equations and signal processing
- Review Article
- Remarks on some variants of minimal point theorem and Ekeland variational principle with applications
- Special Issue on Recent Methods in Approximation Theory - Part I
- Coupled fixed point theorems under new coupled implicit relation in Hilbert spaces
- Approximation of integrable functions by general linear matrix operators of their Fourier series
- Sharp sufficient condition for the convergence of greedy expansions with errors in coefficient computation
- Approximation of conic sections by weighted Lupaş post-quantum Bézier curves
- On the generalized growth and approximation of entire solutions of certain elliptic partial differential equation
- Existence results for ABC-fractional BVP via new fixed point results of F-Lipschitzian mappings
- Linear barycentric rational collocation method for solving biharmonic equation
- A note on the convergence of Phillips operators by the sequence of functions via q-calculus
- Taylor’s series expansions for real powers of two functions containing squares of inverse cosine function, closed-form formula for specific partial Bell polynomials, and series representations for real powers of Pi
- Special Issue on Recent Advances in Fractional Calculus and Nonlinear Fractional Evaluation Equations - Part I
- Positive solutions for fractional differential equation at resonance under integral boundary conditions
- Source term model for elasticity system with nonlinear dissipative term in a thin domain
- A numerical study of anomalous electro-diffusion cells in cable sense with a non-singular kernel
- On Opial-type inequality for a generalized fractional integral operator
- Special Issue on Advances in Integral Transforms and Analysis of Differential Equations with Applications
- Mathematical analysis of a MERS-Cov coronavirus model
- Rapid exponential stabilization of nonlinear continuous systems via event-triggered impulsive control
- Novel soliton solutions for the fractional three-wave resonant interaction equations
- The multistep Laplace optimized decomposition method for solving fractional-order coronavirus disease model (COVID-19) via the Caputo fractional approach
- Special Issue on Problems, Methods and Applications of Nonlinear Analysis
- Some recent results on singular p-Laplacian equations
- Infinitely many solutions for quasilinear Schrödinger equations with sign-changing nonlinearity without the aid of 4-superlinear at infinity
- Special Issue on Recent Advances for Computational and Mathematical Methods in Scientific Problems
- Existence of solutions for a nonlinear problem at resonance
- Asymptotic stability of solutions for a diffusive epidemic model
- Special Issue on Computational and Numerical Methods for Special Functions - Part I
- Fully degenerate Bernoulli numbers and polynomials
- Wigner-Ville distribution and ambiguity function associated with the quaternion offset linear canonical transform
- Some identities related to degenerate Stirling numbers of the second kind
- Two identities and closed-form formulas for the Bernoulli numbers in terms of central factorial numbers of the second kind
- λ-q-Sheffer sequence and its applications
- Special Issue on Fixed Point Theory and Applications to Various Differential/Integral Equations - Part I
- General decay for a nonlinear pseudo-parabolic equation with viscoelastic term
- Generalized common fixed point theorem for generalized hybrid mappings in Hilbert spaces
- Computation of solution of integral equations via fixed point results
- Characterizations of quasi-metric and G-metric completeness involving w-distances and fixed points
- Notes on continuity result for conformable diffusion equation on the sphere: The linear case