α-Mean curvature flow of non-compact complete convex hypersurfaces and the evolution of level sets
-
Hyunsuk Kang
 ,
Ki-Ahm Lee
,
Ki-Ahm Lee

Abstract
We consider the
1 Introduction
We consider a one-parameter family of immersions
where
As an example of other extrinsic curvature flows on graphs, we refer to [4] for the evolution of complete non-compact strictly convex hypersurfaces by the
For closed convex hypersurfaces contracting by powers of the mean curvature, one can find the details in [21] and [22]. It is noteworthy that for compact initial data, the convexity estimate was obtained in [21] using the concavity of some quotient of elementary symmetric polynomials and a smooth approximation to the minimum value for principal curvatures. In this article, without using these properties, a convexity estimate, which follows from the curvature estimate, is derived by controlling the third-order derivatives in Section 5, and this estimate is valid in the compact case. In fact, one shall see that mean convexity is preserved in Section 4. Also, we shall obtain upper and lower curvature bounds for moving sub-level sets. Moreover, using a cut-off function within a level strip, we obtain a uniform upper bound for the mean curvature independent of height. To capture the asymptotic behavior of level sets as the height goes to infinity, we consider a horizontal support-like function for each fixed level set, and the monotone property of level sets allows us to obtain global uniform estimates of noncompact hypersurfaces independent of the height of the graph. Once these estimates established, one can show that as the height approaches infinity, the level set follows the mean curvature flow of codimension two with small error. This approach may provide a way to analyze possible singularities at infinity for noncompact hypersurfaces and possibly for non-convex hypersurfaces.
Throughout this article, we adopt the Einstein convention and sum over repeated indices. Also, we write
respectively, where
with its eigenvalues
for smooth functions
We shall refer to

Domains of projection.
In this article, we obtain global
Proposition 1.1
Let
Remark 1.2
The results in the existing literature provide local estimates that hold within a finite region, i.e., the region where
Using Proposition 1.1, one has the following theorem. Its proof is given in Sections 7 and 8.
Theorem 1.3
Let
there exists a complete non-compact smooth and strictly convex solution
In addition, strict convexity of
Remark 1.4
If the domain
For each
The hypersurface
Remark 1.5
In [3], the maximal existence time of
This article is arranged as follows. In Section 2, evolution equations for tensors and scalar quantities are derived, and in Section 3, a gradient estimate is derived. In Section 4, one has an upper bound for
2 Evolution equations
In this section, we obtain the evolution of the quantities related to the curvature of the hypersurface
Lemma 2.1
Denote
Proof
Equations (1) and (2) can be found in [21]. Let
where
Equations (3) and (4) follow from (2.1). For
which yield
From the definition
Also, one can easily compute
and therefore, one has
Finally, one obtains the evolution of
one has
3 Gradient estimate
In this section, we show that a smooth hypersurface remains a graph under flow (1.1) within the class of smooth solutions to the
where
Reminding the notation in (1.2), we write
for a space-time track of level sets, and denote by
Theorem 3.1
Let
Proof
From Lemma 2.1 and (3.2), one can obtain the evolution equation of
Note that
Case 1. For
Case 2. For
and then, it follows from Young’s inequality that
By multiplying
Then, the conclusion follows from the fact that
From Theorem 3.1, one has the following result about the graphical hypersurfaces:
Corollary 3.2
If an initial hypersurface
4 Estimates for
H
In this section, we prove that for any
4.1 Lower bound for
H
In the following lemma, one shall see that the mean convexity is preserved along the flow.
Lemma 4.1
Let
Proof
From Lemma 2.1, one can obtain
Recalling (3.2), one has
Observe that
Moreover, it follows from
Case 1. For
Case 2. For
at
Thus, one can conclude that
4.2 Upper bound for
H
in finite regions
In this subsection, the constant
Projections of
Lemma 4.2
Let
where
Observe that this estimate is for graphs of finite height. However, in Proposition 4.5, where the height becomes large, we shall derive a curvature estimate, which is independent of the height.
Proof
Let
where
and
Since
and also
From (4.14), replacing
At
On the compact support of
and therefore,
Note that since
Combining (4.16), (4.18), and (4.19), one has
Since
Note that one has that if
for some constant
Then, since
Remark 4.3
The estimate in Lemma 4.2 still holds for a closed initial hypersurface in which case
4.3 Upper bound of
H
for large graph heights
In this section, one shall see that the upper bound of
with large constants
where
where
where
Lemma 4.4
Let
where
Proof
From (4.25), one has
From (4.24), one has
From (4.26), one has
Then, the evolution equations of
We will obtain a local upper bound of
where
Proposition 4.5
Let
Proof
Recall
Note that
For the terms involving
to obtain
Note that the two terms involving
which follows from (4.25), one has
on
where
Then, (4.37) together with (4.40) and (4.41) gives that
Suppose that
for
if
Replacing
where the first term follows from the terms with
Note that on
Using (4.48), at
Since
at
Substituting (4.51) into (4.50) and using
Observe that on the strip
one has
Since
on
and the result follows.□
For the case in which
Proposition 4.6
Let
From Propositions 4.5 and 4.6, one has the following corollary, which gives an upper bound of the mean curvature independent of the height
Corollary 4.7
Let
Given positive constants
(4.56)where
If
(4.57)where
4.4 Proof of Proposition 1.1
The proof for Proposition 1.1 follows from Lemma 4.2, Propositions 4.5 and 4.6.
5 Lower bound of the smallest principal curvature
λ
1
In this section, we obtain a local bound for the smallest principal curvature
Let
where we write
We aim to find a local upper bound of
Proposition 5.1
(Proposition 3.1 [4]) Let
Remark 5.2
Note that the left-hand side of (5.2) depends on the choice of charts, whereas inequality (5.2) holds for any chart and immersion. In the following, we shall see that a lower bound of
Theorem 5.3
Suppose that the initial hypersurface
Proof
Suppose that
Let
From Proposition 5.1, one has
and the chart chosen in (5.4) gives
Putting (5.6) and (5.7) together, one sees that
and since
From the evolution of
Then, again from Lemma 2.1,
Consider the gradient terms involving
From (5.9), one has
and the sum
Proposition 5.4
Let B be as given in (5.14). Then,
B is non-positive for
B is non-positive for
Proof of Proposition 5.4
using the Codazzi equation, one has
Also, using the Cauchy-Schwarz inequality, one has
since
Substituting (5.18) into (5.17), one obtains
using that
By choosing
Returning to the proof of Theorem 5.3, the evolution equation (5.11) for
For
using that
and (5.24), along with the observation from (5.6) and (5.7), gives that on each time section
For
6 Higher regularity
From the evolution equation (1.1), one can easily obtain the following nonlinear equation for
where
To simplify the notation, recall
Observe that the derivative
and the eigenvalues of
in
Note that (6.4) can be obtained by our local a priori estimates shown in Sections 3–5 for a strictly convex solution in a larger domain. For
standard theory for convex or concave fully nonlinear operators can be used. In the following, we give a
Proposition 6.1
(
where C and
Proof
The fully nonlinear operator
By the standard elliptic theory for quasilinear elliptic equations as found in [9], a space Hölder estimate for
Furthermore, one can obtain a
Proposition 6.2
For
where
Proof
Note that
for
where
Proceeding by induction and using (6.11) then yield
Using the time evolution of the Christoffel symbol
one has
From this, one has
By induction, using
from Lemma 2.1, one has
Then, it follows from (6.12) and (6.15) that
where the first sum in (6.16) includes that in (6.12), and the second sum in (6.16) includes the last sum in (6.15) and that in (6.12). Since one has
where
as required.□
Recall the cut-off function
to obtain
where
From (4.30), one obtains that
Let
The last term mentioned earlier satisfies, by Young’s inequality, that
and therefore, (6.23) yields
To control bad terms, take
Consider a finite time interval, say
This completes the induction so that one concludes a global
Proposition 6.3
Under the conditions in Proposition 1.1, one has
where
7 Long-time existence
Theorem 7.1
Let
there exists a complete non-compact smooth and strictly convex solution
the maximal time
Proof
We adopt the argument from the proof of Theorem 1.1 in Section 5 of [3] and outline the steps whose details can be found in Section 5 of [3] and Section 5 of [4]. In order to find the existence theory for noncompact hypersurfaces, we use the short-time and long-time existence for compact case. First, we approximate noncompact hypersurfaces by compact ones and then extract convergent subsequences by obtaining uniform estimates.
By perturbing the convex hypersurfaces using a nonnegative rotationally symmetric function, one obtains strictly convex hypersurfaces as follows: let
where
Taking the
where
where
Denote by
Note that one has a height-independent upper bound for
We want to show that
(ii) Now, we want to show that
Remark 7.2
If
The uniqueness of non-compact solutions requires more work, and this will be discussed in the sequel. For recent works on the uniqueness, see [2] and [5].
8
α
-mean curvature flow of codimension two
In this section, we prove the main theorem of this article, namely, Theorem 1.3. For the case in which one has a compact hypersurface
Proof of Theorem 1.3
For the case of entire graphs, since the hypersurface
8.1 Bounded domain
Ω
0
Consider a time interval
where
However, we also have
as

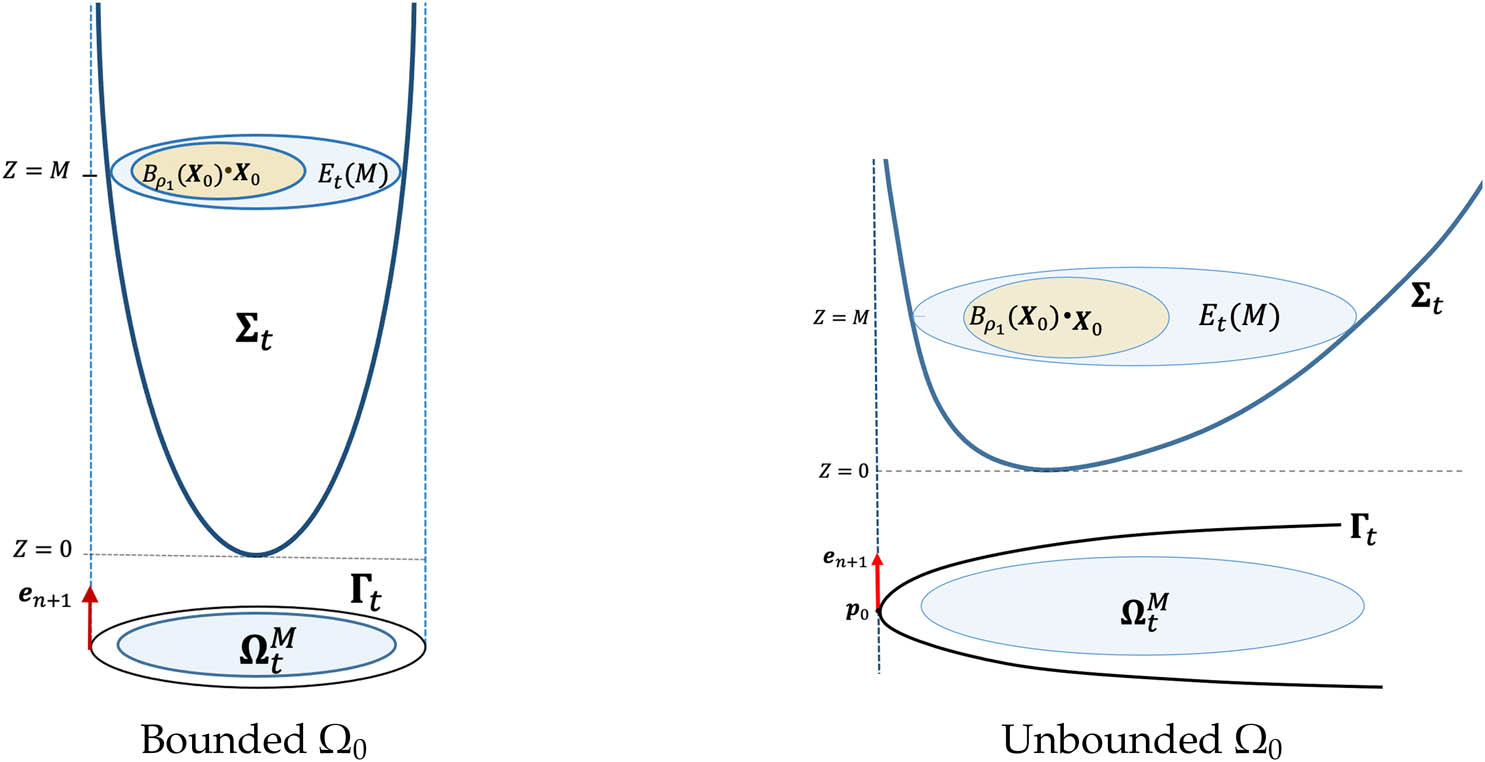
Case of a bounded domain.
Consider a bounded domain
Since
The regularity theory ensures that the evolution of
From Corollary 4.7 and Theorem 5.3, one has
Therefore, one has a family of immersions
where
Lemma 8.1
Let
Proof of Lemma 8.1
To prove
Also, there exists a ball
It remains to show that
8.2 Unbounded domain
Ω
0
We consider the case in which the initial projection
We now proceed as in Section 8.1 for a compact subset
where
where

Case of an unbounded domain.
Note that
From Theorem 1.3, one has an immediate corollary for two-dimensional hypersurfaces.
Corollary 8.2
Given a two-dimensional strictly convex complete non-compact smooth hypersurface over a strictly convex smooth domain as an initial hypersurface,
Proof
For
Remark 8.3
In higher-dimensional cases, Corollary 8.2 may not hold. For example, consider any three-dimensional strictly convex graphical hypersurface defined over an unbounded strictly convex domain contained in a solid cylinder
Acknowledgments
The authors are enormously grateful to the referees for the detailed and helpful comments to improve the manuscript.
-
Funding information: H. Kang was supported by GIST Research Project grant funded by the GIST in 2025. K. Lee was supported by the Ministry of Education of the Republic of Korea and the National Research Foundation of Korea (RS-2025-00515707). T. Lee has been supported by the NRF grant funded by the Korea government (MSIT) (No. RS-2023-00211258).
-
Author contributions: All authors contributed equally to the preparation and the revision of the manuscript. All authors approved the final version of the manuscript.
-
Conflict of interest: The authors state no conflict of interest.
References
[1] B. Andrews, Contraction of convex hypersurfaces in Euclidean space, Calc. Var. PDE. 2 (1994), 151–171, https://doi.org/10.1007/BF01191340. Search in Google Scholar
[2] S. B. Angenent, P. Daskalopoulos, and N. Sesum, Dynamics of convex mean curvature flow, J. Reine Angew. Math. (Crelles Journal) (2025), https://doi.org/10.1515/crelle-2025-0029. Search in Google Scholar
[3] K. Choi and P. Daskalopoulos, The Qk flow on complete non-compact graphs, Calc. Var. PDE. 61 (2022), 73, https://doi.org/10.1007/s00526-021-02162-8. Search in Google Scholar
[4] K. Choi, P. Daskalopoulos, L. Kim, and K. A. Lee, The evolution of complete non-compact graphs by powers of Gauss curvature, J. reine angew. Math. (Crelles J.) 2019 (2019), no. 757, 131–158, https://doi.org/10.1515/crelle-2017-0032. Search in Google Scholar
[5] P. Daskalopoulos and M. Saez, Uniqueness of entire graphs evolving by mean curvature flow, J. reine angew. Math. (Crelles Journal) 796 (2023), 201–227, https://doi.org/10.1515/crelle-2022-0085. Search in Google Scholar
[6] K. Ecker and G. Huisken, Mean curvature evolution of entire graphs, Ann. Math. 130 (1989), 453–471, https://doi.org/10.2307/1971452. Search in Google Scholar
[7] K. Ecker and G. Huisken, Interior estimates for hypersurfaces moving by mean curvature, Invent. Math. 105 (1991), 547–569, https://doi.org/10.1007/BF01232278. Search in Google Scholar
[8] M. Franzen, Entire graphs evolving by powers of the mean curvature, 2011, http://arxiv.org/abs/1112.4359. Search in Google Scholar
[9] D. Gilbarg and N. Trudinger, Elliptic partial differential equations of second order, Classics in Mathematics, Springer-Verlag, Berlin, 2001. 10.1007/978-3-642-61798-0Search in Google Scholar
[10] G. Huisken, Flow by mean curvature of convex surfaces into spheres. J. Differ. Geom. 20 (1984), 237–266, https://doi.org/10.4310/jdg/1214438998. Search in Google Scholar
[11] S. Kim and K. Lee, Parabolic Harnack inequality of viscosity solutions on Riemannian manifolds. J. Funct. Anal. 267 (2014), no. 7, 2152–2198, https://doi.org/10.1016/j.jfa.2014.07.023. Search in Google Scholar
[12] N. V. Krylov and M. V. Safonov, A property of the solutions of parabolic equations with measurable coefficients. Math. USSR-Izvestiya 16 (1981), no. 1, 151–164, 10.1070/IM1981v016n01ABEH001283. Search in Google Scholar
[13] O. A. Ladyzhenskaya, V. A. Solonnikov, and N. N. Uralceva, Linear and Quasilinear Equations of Parabolic Type, Amer. Math. Soc, Providence, RI, 1968. Search in Google Scholar
[14] G. Li and Y. Lv, Evolution of complete noncompact graphs by powers of curvature function, 2019, http://arxiv.org/abs/1901.04099v1. Search in Google Scholar
[15] G. M. Liberman, Second Order Parabolic Differential Equations, World Scientific Publishing Co., Inc., River Edge, NJ, 1996. 10.1142/3302Search in Google Scholar
[16] C. Mantegazza, Lecture Notes on Mean Curvature Flow, Progress in Mathematics 290, Birkhauser, Basel, 2011. 10.1007/978-3-0348-0145-4Search in Google Scholar
[17] W. Maurer, Shadows of graphical mean curvature flow, Comm. Anal. Geom. 29 (2021), no. 1, 183–206, 10.48550/arXiv.1604.05238. Search in Google Scholar
[18] W. Maurer, Hα-flow of mean convex, complete graphical hypersurfaces, 2021, http://arxiv.org/abs/2104.00047. Search in Google Scholar
[19] M. Rupflin and O. C. Schnürer, Weak solutions to mean curvature flow respecting obstacles, Ann. Sc. Norm. Super. Pisa CL. Sci. 20 (2020), no. 5, 1429–1467, 10.2422/2036-2145.201708_005. Search in Google Scholar
[20] M. Sáez and O. C. Schnürer, Mean curvature flow without singularities, J. Differ. Geom. 97 (2014), 545–570, 10.4310/jdg/1406033979. Search in Google Scholar
[21] F. Schulze, Evolution of convex hypersurfaces by powers of the mean curvature, Math. Z. 251 (2005), 721–733, https://doi.org/10.1007/s00209-004-0721-5. Search in Google Scholar
[22] F. Schulze, Convexity estimates for flows by powers of the mean curvature, Ann. Sc. Norm. Super. Pisa Cl. Sci. 5 (2006), 261–277. 10.2422/2036-2145.2006.2.06Search in Google Scholar
[23] G. Tian and A. Wang, A priori estimates for fully nonlinear parabolic equations, Int. Math. Res. Not. 17 (2013), 3857–3877, https://doi.org/10.1093/imrn/rns169. Search in Google Scholar
[24] K. Tso, Deforming a hypersurface by its Gauss-Kronecker curvature, Comm. Pure. Appl. Math. 38 (1985), no. 6, 867–882, https://doi.org/10.1002/cpa.3160380615. Search in Google Scholar
[25] L. Wang, On the regularity theory of fully nonlinear equations: I, Comm. Pure. Appl. Math. 45 (1992), no. 1, 27–76, https://doi.org/10.1002/cpa.3160450103. Search in Google Scholar
[26] H. Wu, The spherical images of convex hypersurfaces, J. Differ. Geom. 9 (1974), 279–290, https://doi.org/10.4310/jdg/1214432294. Search in Google Scholar
[27] X. P. Zhu, Lectures on Mean Curvature Flows, Studies on Advanced Mathematics, vol. 32, AMS, Boston, 2002. 10.1090/amsip/032Search in Google Scholar
© 2025 the author(s), published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Research Articles
- Incompressible limit for the compressible viscoelastic fluids in critical space
- Concentrating solutions for double critical fractional Schrödinger-Poisson system with p-Laplacian in ℝ3
- Intervals of bifurcation points for semilinear elliptic problems
- On multiplicity of solutions to nonlinear Dirac equation with local super-quadratic growth
- Entire radial bounded solutions for Leray-Lions equations of (p, q)-type
- Combinatorial pth Calabi flows for total geodesic curvatures in spherical background geometry
- Sharp upper bounds for the capacity in the hyperbolic and Euclidean spaces
- Positive solutions for asymptotically linear Schrödinger equation on hyperbolic space
- Existence and non-degeneracy of the normalized spike solutions to the fractional Schrödinger equations
- Existence results for non-coercive problems
- Ground states for Schrödinger-Poisson system with zero mass and the Coulomb critical exponent
- Geometric characterization of generalized Hajłasz-Sobolev embedding domains
- Subharmonic solutions of first-order Hamiltonian systems
- Sharp asymptotic expansions of entire large solutions to a class of k-Hessian equations with weights
- Stability of pyramidal traveling fronts in time-periodic reaction–diffusion equations with degenerate monostable and ignition nonlinearities
- Ground-state solutions for fractional Kirchhoff-Choquard equations with critical growth
- Existence results of variable exponent double-phase multivalued elliptic inequalities with logarithmic perturbation and convections
- Homoclinic solutions in periodic partial difference equations
- Classical solution for compressible Navier-Stokes-Korteweg equations with zero sound speed
- Properties of minimizers for L2-subcritical Kirchhoff energy functionals
- Asymptotic behavior of global mild solutions to the Keller-Segel-Navier-Stokes system in Lorentz spaces
- Blow-up solutions to the Hartree-Fock type Schrödinger equation with the critical rotational speed
- Qualitative properties of solutions for dual fractional parabolic equations involving nonlocal Monge-Ampère operator
- Regularity for double-phase functionals with nearly linear growth and two modulating coefficients
- Uniform boundedness and compactness for the commutator of an extension of Riesz transform on stratified Lie groups
- Normalized solutions to nonlinear Schrödinger equations with mixed fractional Laplacians
- Existence of positive radial solutions of general quasilinear elliptic systems
- Low Mach number and non-resistive limit of magnetohydrodynamic equations with large temperature variations in general bounded domains
- Sharp viscous shock waves for relaxation model with degeneracy
- Bifurcation and multiplicity results for critical problems involving the p-Grushin operator
- Asymptotic behavior of solutions of a free boundary model with seasonal succession and impulsive harvesting
- Blowing-up solutions concentrated along minimal submanifolds for some supercritical Hamiltonian systems on Riemannian manifolds
- Stability of rarefaction wave for relaxed compressible Navier-Stokes equations with density-dependent viscosity
- Singularity for the macroscopic production model with Chaplygin gas
- Global strong solution of compressible flow with spherically symmetric data and density-dependent viscosities
- Global dynamics of population-toxicant models with nonlocal dispersals
- α-Mean curvature flow of non-compact complete convex hypersurfaces and the evolution of level sets
- High-energy solutions for coupled Schrödinger systems with critical growth and lack of compactness
- On the structure and lifespan of smooth solutions for the two-dimensional hyperbolic geometric flow equation
- Well-posedness for physical vacuum free boundary problem of compressible Euler equations with time-dependent damping
- On the existence of solutions of infinite systems of Volterra-Hammerstein-Stieltjes integral equations
- Remark on the analyticity of the fractional Fokker-Planck equation
- Continuous dependence on initial data for damped fourth-order wave equation with strain term
- Unilateral problems for quasilinear operators with fractional Riesz gradients
- Boundedness of solutions to quasilinear elliptic systems
- Existence of positive solutions for critical p-Laplacian equation with critical Neumann boundary condition
- Non-local diffusion and pulse intervention in a faecal-oral model with moving infected fronts
- Nonsmooth analysis of doubly nonlinear second-order evolution equations with nonconvex energy functionals
- Qualitative properties of solutions to the viscoelastic beam equation with damping and logarithmic nonlinear source terms
- Shape of extremal functions for weighted Sobolev-type inequalities
- One-dimensional boundary blow up problem with a nonlocal term
- Doubling measure and regularity to K-quasiminimizers of double-phase energy
- General solutions of weakly delayed discrete systems in 3D
- Global well-posedness of a nonlinear Boussinesq-fluid-structure interaction system with large initial data
- Optimal large time behavior of the 3D rate type viscoelastic fluids
- Local well-posedness for the two-component Benjamin-Ono equation
- Self-similar blow-up solutions of the four-dimensional Schrödinger-Wave system
- Existence and stability of traveling waves in a Keller-Segel system with nonlinear stimulation
- Existence and multiplicity of solutions for a class of superlinear p-Laplacian equations
- On the global large regular solutions of the 1D degenerate compressible Navier-Stokes equations
- Normal forms of piecewise-smooth monodromic systems
- Fractional Dirichlet problems with singular and non-locally convective reaction
- Sharp forced waves of degenerate diffusion equations in shifting environments
- Global boundedness and stability of a quasilinear two-species chemotaxis-competition model with nonlinear sensitivities
- Non-existence, radial symmetry, monotonicity, and Liouville theorem of master equations with fractional p-Laplacian
- Global existence, asymptotic behavior, and finite time blow up of solutions for a class of generalized thermoelastic system with p-Laplacian
- Formation of singularities for a linearly degenerate hyperbolic system arising in magnetohydrodynamics
- Linear stability and bifurcation analysis for a free boundary problem arising in a double-layered tumor model
- Hopf's lemma, asymptotic radial symmetry, and monotonicity of solutions to the logarithmic Laplacian parabolic system
- Generalized quasi-linear fractional Wentzell problems
- Existence, symmetry, and regularity of ground states of a nonlinear Choquard equation in the hyperbolic space
- Normalized solutions for NLS equations with general nonlinearity on compact metric graphs
- Boundedness and global stability in a predator-prey chemotaxis system with indirect pursuit-evasion interaction and nonlocal kinetics
- Review Article
- Existence and stability of contact discontinuities to piston problems
Articles in the same Issue
- Research Articles
- Incompressible limit for the compressible viscoelastic fluids in critical space
- Concentrating solutions for double critical fractional Schrödinger-Poisson system with p-Laplacian in ℝ3
- Intervals of bifurcation points for semilinear elliptic problems
- On multiplicity of solutions to nonlinear Dirac equation with local super-quadratic growth
- Entire radial bounded solutions for Leray-Lions equations of (p, q)-type
- Combinatorial pth Calabi flows for total geodesic curvatures in spherical background geometry
- Sharp upper bounds for the capacity in the hyperbolic and Euclidean spaces
- Positive solutions for asymptotically linear Schrödinger equation on hyperbolic space
- Existence and non-degeneracy of the normalized spike solutions to the fractional Schrödinger equations
- Existence results for non-coercive problems
- Ground states for Schrödinger-Poisson system with zero mass and the Coulomb critical exponent
- Geometric characterization of generalized Hajłasz-Sobolev embedding domains
- Subharmonic solutions of first-order Hamiltonian systems
- Sharp asymptotic expansions of entire large solutions to a class of k-Hessian equations with weights
- Stability of pyramidal traveling fronts in time-periodic reaction–diffusion equations with degenerate monostable and ignition nonlinearities
- Ground-state solutions for fractional Kirchhoff-Choquard equations with critical growth
- Existence results of variable exponent double-phase multivalued elliptic inequalities with logarithmic perturbation and convections
- Homoclinic solutions in periodic partial difference equations
- Classical solution for compressible Navier-Stokes-Korteweg equations with zero sound speed
- Properties of minimizers for L2-subcritical Kirchhoff energy functionals
- Asymptotic behavior of global mild solutions to the Keller-Segel-Navier-Stokes system in Lorentz spaces
- Blow-up solutions to the Hartree-Fock type Schrödinger equation with the critical rotational speed
- Qualitative properties of solutions for dual fractional parabolic equations involving nonlocal Monge-Ampère operator
- Regularity for double-phase functionals with nearly linear growth and two modulating coefficients
- Uniform boundedness and compactness for the commutator of an extension of Riesz transform on stratified Lie groups
- Normalized solutions to nonlinear Schrödinger equations with mixed fractional Laplacians
- Existence of positive radial solutions of general quasilinear elliptic systems
- Low Mach number and non-resistive limit of magnetohydrodynamic equations with large temperature variations in general bounded domains
- Sharp viscous shock waves for relaxation model with degeneracy
- Bifurcation and multiplicity results for critical problems involving the p-Grushin operator
- Asymptotic behavior of solutions of a free boundary model with seasonal succession and impulsive harvesting
- Blowing-up solutions concentrated along minimal submanifolds for some supercritical Hamiltonian systems on Riemannian manifolds
- Stability of rarefaction wave for relaxed compressible Navier-Stokes equations with density-dependent viscosity
- Singularity for the macroscopic production model with Chaplygin gas
- Global strong solution of compressible flow with spherically symmetric data and density-dependent viscosities
- Global dynamics of population-toxicant models with nonlocal dispersals
- α-Mean curvature flow of non-compact complete convex hypersurfaces and the evolution of level sets
- High-energy solutions for coupled Schrödinger systems with critical growth and lack of compactness
- On the structure and lifespan of smooth solutions for the two-dimensional hyperbolic geometric flow equation
- Well-posedness for physical vacuum free boundary problem of compressible Euler equations with time-dependent damping
- On the existence of solutions of infinite systems of Volterra-Hammerstein-Stieltjes integral equations
- Remark on the analyticity of the fractional Fokker-Planck equation
- Continuous dependence on initial data for damped fourth-order wave equation with strain term
- Unilateral problems for quasilinear operators with fractional Riesz gradients
- Boundedness of solutions to quasilinear elliptic systems
- Existence of positive solutions for critical p-Laplacian equation with critical Neumann boundary condition
- Non-local diffusion and pulse intervention in a faecal-oral model with moving infected fronts
- Nonsmooth analysis of doubly nonlinear second-order evolution equations with nonconvex energy functionals
- Qualitative properties of solutions to the viscoelastic beam equation with damping and logarithmic nonlinear source terms
- Shape of extremal functions for weighted Sobolev-type inequalities
- One-dimensional boundary blow up problem with a nonlocal term
- Doubling measure and regularity to K-quasiminimizers of double-phase energy
- General solutions of weakly delayed discrete systems in 3D
- Global well-posedness of a nonlinear Boussinesq-fluid-structure interaction system with large initial data
- Optimal large time behavior of the 3D rate type viscoelastic fluids
- Local well-posedness for the two-component Benjamin-Ono equation
- Self-similar blow-up solutions of the four-dimensional Schrödinger-Wave system
- Existence and stability of traveling waves in a Keller-Segel system with nonlinear stimulation
- Existence and multiplicity of solutions for a class of superlinear p-Laplacian equations
- On the global large regular solutions of the 1D degenerate compressible Navier-Stokes equations
- Normal forms of piecewise-smooth monodromic systems
- Fractional Dirichlet problems with singular and non-locally convective reaction
- Sharp forced waves of degenerate diffusion equations in shifting environments
- Global boundedness and stability of a quasilinear two-species chemotaxis-competition model with nonlinear sensitivities
- Non-existence, radial symmetry, monotonicity, and Liouville theorem of master equations with fractional p-Laplacian
- Global existence, asymptotic behavior, and finite time blow up of solutions for a class of generalized thermoelastic system with p-Laplacian
- Formation of singularities for a linearly degenerate hyperbolic system arising in magnetohydrodynamics
- Linear stability and bifurcation analysis for a free boundary problem arising in a double-layered tumor model
- Hopf's lemma, asymptotic radial symmetry, and monotonicity of solutions to the logarithmic Laplacian parabolic system
- Generalized quasi-linear fractional Wentzell problems
- Existence, symmetry, and regularity of ground states of a nonlinear Choquard equation in the hyperbolic space
- Normalized solutions for NLS equations with general nonlinearity on compact metric graphs
- Boundedness and global stability in a predator-prey chemotaxis system with indirect pursuit-evasion interaction and nonlocal kinetics
- Review Article
- Existence and stability of contact discontinuities to piston problems