Combinatorial pth Calabi flows for total geodesic curvatures in spherical background geometry
-
Bin Liu
 and
Yi Qi
and
Yi Qi

Abstract
The concept of combinatorial pth Calabi flow is proposed for finding circle packing metrics with prescribed curvatures. It has been studied under the Euclidean and hyperbolic background geometries. This study investigates the combinatorial pth Calabi flow for total geodesic curvatures under the spherical background geometry. It is established that the combinatorial pth Calabi flow, subject to given total geodesic curvatures under the spherical background geometry, exists for all time
1 Introduction
It is important to explore a metric with prescribed curvatures on a given manifold under various background geometries. The classical Nirenberg problem aims to determine the achievable Gaussian curvatures for a conformal metric on
In discrete geometry, geometric flow can also be employed to investigate circle pattern metrics on polyhedral surfaces. Let
To identify circle packing metric with prescribed discrete Gaussian curvatures, Chow and Luo [8] introduced the combinatorial Ricci flow as follows:
where
where
The combinatorial Ricci flow evolves as the gradient flow of discrete entropy energy [14]. The solution to the normalized combinatorial Ricci flow converges to Thurston’s circle packing exponentially fast [8].
Subsequently, the combinatorial Calabi flow, as an analog of smooth Calabi flow, exhibits a solution that exists for all time. Ge demonstrated that it converges exponentially fast to a constant curvature metric in both Euclidean and hyperbolic background geometries as well [11]. Lin and Zhang [20,21] introduced a type of higher-order curvature flow known as combinatorial pth Calabi flow to generalize the combinatorial Calabi flow. In the context of Euclidean background geometry, here is how it is defined:
where
with
where
In hyperbolic background geometry, the combinatorial pth Calabi flow is defined as
where
Those combinatorial curvature flows mentioned earlier are investigated on polyhedral surface characterized by discrete Gaussian curvatures. To address the rigidity of circle pattern in spherical background geometry, Nie [22] parameterized the analog of Teichmüller space of all the ideal circle pattern metrics on
Then, combinatorial Ricci flow and combinatorial Calabi flow with total geodesic curvatures are introduced for circle patterns in hyperbolic and spherical background geometry [12,13,18]. Hu [16] redefined the combinatorial pth Calabi flow for total geodesic curvatures in hyperbolic background geometry.
Inspired by Nie and Hu’s work, we construct combinatorial pth Calabi flow based on total geodesic curvatures in spherical background geometry, which is depicted in Definition 2.4:
where
where
We establish the existence of the combinatorial pth Calabi flow indefinitely, demonstrating its convergence contingent upon the fulfillment of a specific combinatorial criterion by the prescribed total geodesic curvatures.
Theorem 1.1
Let
The solution of the combinatorial pth Calabi flow exists for all time
Assuming
Organization of this article. This article is structured as follows. Section 2 provides an introduction to the foundational concepts of ideal circle patterns in spherical background geometry and the combinatorial pth Calabi flow. Section 3 outlines our primary approach, focusing on the variational principle used in our proof. Section 4 is dedicated to proving the main theorem.
2 Preliminaries
2.1 Spherical ideal circle pattern
Informally, a circle pattern refers to a finite or potentially infinite arrangement of open circular disks, situated within a spherical, Euclidean, or hyperbolic geometric context on a compact surface
The spherical conical disk
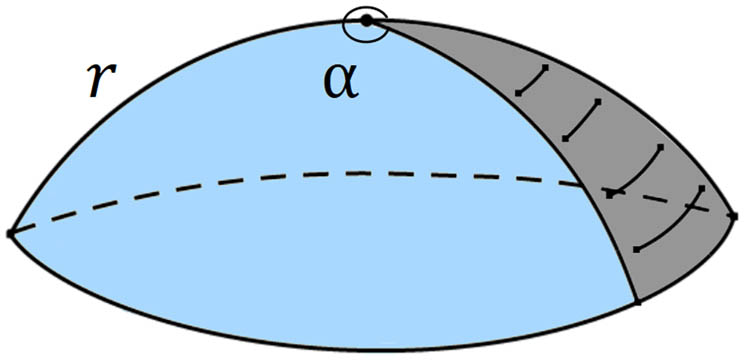
Spherical conical disk
Definition 2.1
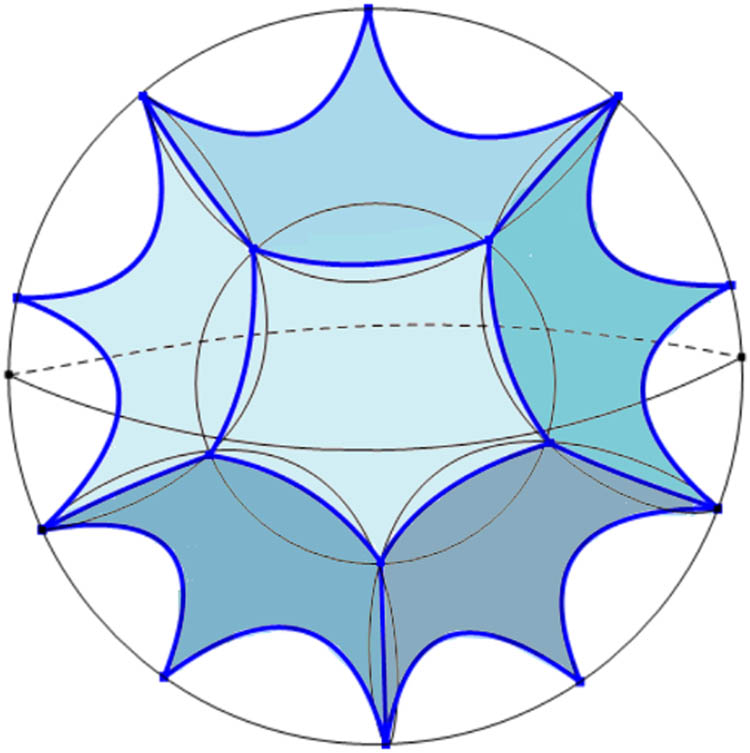
(Spherical ideal circle pattern) Consider a closed surface
The images of every spherical conical disk
In this context, we consider the intersections of the spherical circles as the vertices. If the two vertices coincide with the same bigon, an edge is subsequently drawn between them. There is a simple weighted graph

Local picture of a circle pattern with its weighted graph.
where
Based on the weighted graph, there exists a closed 2-cell embedding
Moreover,
The spherical circle pattern induces a unique spherical circle pattern metric
Definition 2.2
(Polyhedral surfaces) Consider a compact surface
The circle pattern
where
We establish auxiliary geodesic lines from the center
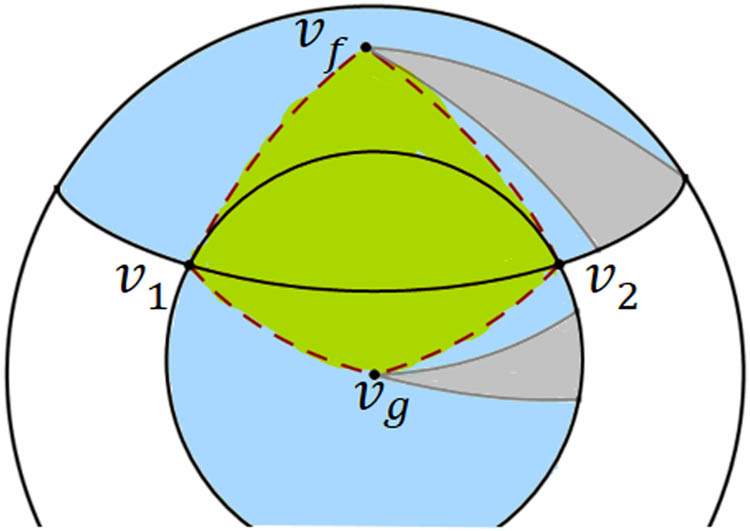
Spherical quadrilateral.
From the perspective of three-dimensional hyperbolic geometry, a spherical ideal circle pattern is equivalent to a convex hyperbolic ideal polyhedron. Since the Poincaré ball
Hyperbolic ideal polyhedron and its corresponding spherical ideal circle pattern.
2.2 Parameterization of the analog of Teichmüller space
Geodesic curvature and circumference of the boundary
Define

Face with its corresponding conical circle.
For the ideal circle pattern, the circumference
Given a closed surface
In other words, two circle pattern metrics
Proposition 2.3
The map
Proof
In the context of spherical ideal circle patterns, there is a homeomorphism between radius space
The map is well defined for every
By connecting the centers of each polyhedral face with its vertices, a triangulation on
Thus, the cone angles are entirely determined by the radius based on
Given a topological surface S and its weighted graph

Two intersecting conical circles.
For hyperbolic ideal circle pattern, the analog of Teichmüller space could be parameterized by system of discrete Gaussian curvatures (cone angles) while fail in spherical and Euclidean background geometry. In their work [3], Bobenko and Springborn established the existence of a unique circle pattern up to Möbius transformation based on
The analog of Teichmüller space can also be parameterized by system of total geodesic curvatures through a variable substitution for the 1-form in the original variational method as is shown in equation (18).
2.3 Combinatorial pth Calabi flow
The combinatorial pth Calabi flow constitutes a class of combinatorial geometric flows. It primarily investigates the temporal evolution of the circle packing metric on the topological surface
Definition 2.4
(Combinatorial pth Calabi flow)
where
where
Remark 2.5
The combinatorial pth Calabi flow is the generalization of combinatorial Calabi flow, and it comes to the combinatorial Calabi flow when
3 Variational principle
de Verdière [9,10] introduced the variational principle to address the circle pattern problem. Nie [22] extended this principle to focus on the total geodesic curvatures of ideal circle pattern within a spherical background geometry. This approach transforms the task of discovering circle patterns with constant total geodesic curvatures into extremum problem for a specific functional. A critical component involves minimizing a suitable functional to achieve this transformation.
Lemma 3.1
[22] Let
where
Proof
This lemma can be directly deduced by the Gauss-Bonnet theorem.□
Lemma 3.2
[12] The symbols
Let
Through a variable substitution, it is equivalent to the form presented as follows:
Next, we can demonstrate the closeness of the 1-form
By Lemma 3.2,
on
For
Let us denote the vector containing the logarithms of geodesic curvatures and total geodesic curvatures across all faces, and let
It is easy to see that
Lemma 3.2 indicates that the Hessian matrix is symmetric and diagonally dominant. For each column, by subtracting the rest of the elements from which on the main diagonal, we obtain that
where
Consequently, if
Lemma 3.3
The gradient map of
is a homeomorphism. Here,
Proof
It is established that for a
Furthermore, we illustrate that the range of the gradient map precisely corresponds to
By equation (11),
Therefore,
Our attention now pivots toward establishing the upper bound. By the Gauss-Bonnet formula,
Thus,
where
Consequently,
This confirms the surjective nature of the mapping. Ultimately, the gradient map of
4 Proof of Theorem 1.1
Assuming the solution to the combinatorial pth Calabi flow converges to a spherical circle packing, according to Lemma 3.3, the total geodesic curvature
4.1 Long-time existence
We use the change of variables
Since all
Proposition 4.1
For any initial value
Proof
Now, we consider the function
where n is the number of edges of polygon corresponding to
Fixed a face
We now establish the existence of a constant
By the definition of
Hence, all
4.2 Convergence
Let
Proposition 4.2
The function
Proof
Let
As a consequence, for the total geodesic curvature
and
we have
Moreover, for the matrix
For
Therefore,
Proposition 4.3
Suppose
Proof
Using the mean value theorem for the function
By the assumption, the solution to the combinatorial pth Calabi flow
According to Proposition 4.2,
Thus,
which implies that
Hence, we have
i.e.,
Since we have that
which implies that
We are now in a position to complete the proof of Theorem 1.1. The convergence is established through a proof by contradiction.
Suppose the solution
Since
Upon encountering conditions that contradict Proposition 4.3, the function
For any initial value, the solution of the combinatorial pth Calabi flow exists for all time as stated in Proposition 4.1. As time progresses indefinitely, the solution converges. Hence, the proof of Theorem 1.1 is complete.
By Lemma 3.3, the gradient map of
Thus,
That is to say, along the combinatorial pth Calabi flow, the spherical circle pattern metric is convergent to a unique metric with prescribed total geodesic curvatures.
Acknowledgment
The authors are very grateful to the referee for a detailed reading of this manuscript and recommendations.
-
Funding information: This work was supported by NSFC (Grant Number 12271017).
-
Author contributions: All authors contributed equally to the writing of this article. All authors read and approved the final manuscript.
-
Conflict of interest: The authors state no conflict of interest.
-
Data availability statement: Data sharing is not applicable to this article as no datasets were generated or analyzed during the current study.
References
[1] E. M. Andreev, On Convex polyhedra in Lobačevskǐ spaces, Math. USSR-Sb. 10 (1970), no. 3, 413–440, DOI: https://doi.org/10.1070/SM1970v010n03ABEH001677.10.1070/SM1970v010n03ABEH001677Search in Google Scholar
[2] E. M. Andreev, On Convex polyhedra of finite volume in Lobačevskǐ space, Math. USSR-Sb. 12 (1970), no. 2, 255–259, DOI: https://doi.org/10.1070/SM1970v012n02ABEH000920.10.1070/SM1970v012n02ABEH000920Search in Google Scholar
[3] A. I. Bobenko and B. A. Springborn, Variational principles for circle patterns and Koebe’s theorem, Trans. Amer. Math. Soc. 356 (2004), no. 2, 659–689, https://doi.org/10.48550/arXiv.math/0203250. Search in Google Scholar
[4] P. L. Bowers and K. Stephenson, Uniformizing dessins and Belyĭ maps via circle packing, Mem. Amer. Math. Soc. 170 (2004), no. 805, xii+97 pp. DOI: https://doi.org/10.1090/memo/0805.10.1090/memo/0805Search in Google Scholar
[5] E. Calabi, Extremal Kähler metrics, Annals of Mathematics Studies, vol 102, Princeton University Press, Princeton, NJ, 1982, pp. 259–290. DOI: https://doi.org/10.1515/9781400881918-016.10.1515/9781400881918-016Search in Google Scholar
[6] E. Calabi, Extremal Kähler metrics. II, Differential geometry and complex analysis, Springer-Verlag, Berlin, 1985, pp. 95–114. DOI: https://doi.org/10.1007/978-3-642-69828-6_8.10.1007/978-3-642-69828-6_8Search in Google Scholar
[7] S. Y. A. Chang and P. C. Yang, Prescribing Gaussian curvature on S2, Acta Math. 159 (1987), no. 3–4, 215–259, 10.1007/BF02392560. Search in Google Scholar
[8] B. Chow and F. Luo, Combinatorial Ricci flows on surfaces, J. Differential Geom. 63 (2003), no. 1, 97–129, https://doi.org/10.4310/jdg/1080835659. Search in Google Scholar
[9] Y. C. de Verdière, Un principe variationnel pour les empilements de cercles, Invent. Math. 104 (1991), no. 3, 655–669, https://doi.org/10.1007/BF01245096. Search in Google Scholar
[10] J. Dai, D. Gu, and F. Luo, Variational principles for discrete surfaces, Advanced Lectures in Mathematics, vol. 4, International Press, Somerville, MA; Higher Education Press, Beijing, 2008, iv+146 pp. ISBN: 978-1-57146-172-8. Search in Google Scholar
[11] H. Ge, Combinatorial Calabi flows on surfaces, Trans. Amer. Math. Soc. 370 (2018), no. 2, 1377–1391, DOI: https://doi.org/10.1090/tran/7196.10.1090/tran/7196Search in Google Scholar
[12] H. Ge, B. Hua, and P. Zhou, A combinatorial curvature flow in spherical background geometry, J. Funct. Anal. 286 (2024), no. 7, Paper No. 110335, 12 pp. https://doi.org/10.1016/j.jfa.2024.110335. Search in Google Scholar
[13] H. Ge, B. Hua, and Z. Zhou, Combinatorial Ricci flows for ideal circle patterns, Adv. Math. 383 (2021), Paper No. 107698, 26 pp. https://doi.org/10.1016/j.aim.2021.107698. Search in Google Scholar
[14] D. X. Gu, F. Luo, and S. T. Yau, Fundamentals of computational conformal geometry, Math. Comput. Sci. 4 (2010), no. 4, 389–429. https://doi.org/10.1007/s11786-011-0065-6. Search in Google Scholar
[15] R. S. Hamilton, Three-manifolds with positive Ricci curvature, J. Differential Geometry 17 (1982), no. 2, 255–306. 10.4310/jdg/1214436922Search in Google Scholar
[16] G. Hu, Z. Lei, Y. Qi, and P. Zhou, Combinatorial p-th Calabi flows for total geodesic curvatures in hyperbolic background geometry, J. Geom. Anal. 35 (2025), 18, https://doi.org/10.1007/s12220-024-01846-9. Search in Google Scholar
[17] P. Koebe, Kontaktprobleme der konformen Abbildung, Ber. Sächs. Akad. Wiss. Leipzig, Math.-Phys. Kl. 88 (1936), 141–164. Search in Google Scholar
[18] Z. Lei and P. Zhou, Combinatorial Calabi flows for ideal circle patterns in spherical background geometry, J. Differential Eqns. 427 (2025), 676–688. DOI: https://doi.org/10.1016/j.jde.2025.02.002.10.1016/j.jde.2025.02.002Search in Google Scholar
[19] G. Leibon, Characterizing the Delaunay decompositions of compact hyperbolic surfaces, Geom. Topol. 6 (2002), 361–391, 10.2140/gt.2002.6.361. Search in Google Scholar
[20] A. Lin and X. Zhang, Combinatorial pth Calabi flows on surfaces, Adv. Math. 346 (2019), 1067–1090, DOI: https://doi.org/10.1016/j.aim.2019.02.011. 10.1016/j.aim.2019.02.011Search in Google Scholar
[21] A. Lin and X. Zhang, Combinatorial pth Ricci flows on surfaces, Nonlinear Anal. 211 (2021), Paper No. 112417, 12 pp. DOI: https://doi.org/10.1016/j.na.2021.112417.10.1016/j.na.2021.112417Search in Google Scholar
[22] X. Nie, On circle patterns and spherical conical metrics, Proc. Amer. Math. Soc. 152 (2024), no. 2, 843–853, DOI: https://doi.org/10.1090/proc/16557.10.1090/proc/16557Search in Google Scholar
[23] G. Perelman, Finite extinction time for the solutions to the Ricci flow on certain three-manifolds, arXiv: math/0307245, DOI: https://doi.org/10.48550/arXiv.math/0307245.Search in Google Scholar
[24] G. Perelman, Ricci flow with surgery on three-manifolds, arXiv: math/0303109DOI: https://doi.org/10.48550/arXiv.math/0303109.Search in Google Scholar
[25] I. Rivin, Euclidean structures on simplicial surfaces and hyperbolic volume, Ann. Math. (2) 139 (1994), no. 3, 553–580, https://doi.org/10.2307/2118572. Search in Google Scholar
[26] W. P. Thurston, The Geometry and Topology of 3-manifolds, Lecture Notes, Princeton University, 1978.Search in Google Scholar
© 2025 the author(s), published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Research Articles
- Incompressible limit for the compressible viscoelastic fluids in critical space
- Concentrating solutions for double critical fractional Schrödinger-Poisson system with p-Laplacian in ℝ3
- Intervals of bifurcation points for semilinear elliptic problems
- On multiplicity of solutions to nonlinear Dirac equation with local super-quadratic growth
- Entire radial bounded solutions for Leray-Lions equations of (p, q)-type
- Combinatorial pth Calabi flows for total geodesic curvatures in spherical background geometry
- Sharp upper bounds for the capacity in the hyperbolic and Euclidean spaces
- Positive solutions for asymptotically linear Schrödinger equation on hyperbolic space
- Existence and non-degeneracy of the normalized spike solutions to the fractional Schrödinger equations
- Existence results for non-coercive problems
- Ground states for Schrödinger-Poisson system with zero mass and the Coulomb critical exponent
- Geometric characterization of generalized Hajłasz-Sobolev embedding domains
- Subharmonic solutions of first-order Hamiltonian systems
- Sharp asymptotic expansions of entire large solutions to a class of k-Hessian equations with weights
- Stability of pyramidal traveling fronts in time-periodic reaction–diffusion equations with degenerate monostable and ignition nonlinearities
- Ground-state solutions for fractional Kirchhoff-Choquard equations with critical growth
- Existence results of variable exponent double-phase multivalued elliptic inequalities with logarithmic perturbation and convections
- Homoclinic solutions in periodic partial difference equations
- Classical solution for compressible Navier-Stokes-Korteweg equations with zero sound speed
- Properties of minimizers for L2-subcritical Kirchhoff energy functionals
- Asymptotic behavior of global mild solutions to the Keller-Segel-Navier-Stokes system in Lorentz spaces
- Blow-up solutions to the Hartree-Fock type Schrödinger equation with the critical rotational speed
- Qualitative properties of solutions for dual fractional parabolic equations involving nonlocal Monge-Ampère operator
- Regularity for double-phase functionals with nearly linear growth and two modulating coefficients
- Uniform boundedness and compactness for the commutator of an extension of Riesz transform on stratified Lie groups
- Normalized solutions to nonlinear Schrödinger equations with mixed fractional Laplacians
- Existence of positive radial solutions of general quasilinear elliptic systems
- Low Mach number and non-resistive limit of magnetohydrodynamic equations with large temperature variations in general bounded domains
- Sharp viscous shock waves for relaxation model with degeneracy
- Bifurcation and multiplicity results for critical problems involving the p-Grushin operator
- Asymptotic behavior of solutions of a free boundary model with seasonal succession and impulsive harvesting
- Blowing-up solutions concentrated along minimal submanifolds for some supercritical Hamiltonian systems on Riemannian manifolds
- Stability of rarefaction wave for relaxed compressible Navier-Stokes equations with density-dependent viscosity
- Singularity for the macroscopic production model with Chaplygin gas
- Global strong solution of compressible flow with spherically symmetric data and density-dependent viscosities
- Global dynamics of population-toxicant models with nonlocal dispersals
- α-Mean curvature flow of non-compact complete convex hypersurfaces and the evolution of level sets
- High-energy solutions for coupled Schrödinger systems with critical growth and lack of compactness
- On the structure and lifespan of smooth solutions for the two-dimensional hyperbolic geometric flow equation
- Well-posedness for physical vacuum free boundary problem of compressible Euler equations with time-dependent damping
- On the existence of solutions of infinite systems of Volterra-Hammerstein-Stieltjes integral equations
- Remark on the analyticity of the fractional Fokker-Planck equation
- Continuous dependence on initial data for damped fourth-order wave equation with strain term
- Unilateral problems for quasilinear operators with fractional Riesz gradients
- Boundedness of solutions to quasilinear elliptic systems
- Existence of positive solutions for critical p-Laplacian equation with critical Neumann boundary condition
- Non-local diffusion and pulse intervention in a faecal-oral model with moving infected fronts
- Nonsmooth analysis of doubly nonlinear second-order evolution equations with nonconvex energy functionals
- Qualitative properties of solutions to the viscoelastic beam equation with damping and logarithmic nonlinear source terms
- Shape of extremal functions for weighted Sobolev-type inequalities
- One-dimensional boundary blow up problem with a nonlocal term
- Doubling measure and regularity to K-quasiminimizers of double-phase energy
- General solutions of weakly delayed discrete systems in 3D
- Global well-posedness of a nonlinear Boussinesq-fluid-structure interaction system with large initial data
- Optimal large time behavior of the 3D rate type viscoelastic fluids
- Local well-posedness for the two-component Benjamin-Ono equation
- Self-similar blow-up solutions of the four-dimensional Schrödinger-Wave system
- Existence and stability of traveling waves in a Keller-Segel system with nonlinear stimulation
- Existence and multiplicity of solutions for a class of superlinear p-Laplacian equations
- On the global large regular solutions of the 1D degenerate compressible Navier-Stokes equations
- Normal forms of piecewise-smooth monodromic systems
- Fractional Dirichlet problems with singular and non-locally convective reaction
- Sharp forced waves of degenerate diffusion equations in shifting environments
- Global boundedness and stability of a quasilinear two-species chemotaxis-competition model with nonlinear sensitivities
- Non-existence, radial symmetry, monotonicity, and Liouville theorem of master equations with fractional p-Laplacian
- Global existence, asymptotic behavior, and finite time blow up of solutions for a class of generalized thermoelastic system with p-Laplacian
- Formation of singularities for a linearly degenerate hyperbolic system arising in magnetohydrodynamics
- Linear stability and bifurcation analysis for a free boundary problem arising in a double-layered tumor model
- Hopf's lemma, asymptotic radial symmetry, and monotonicity of solutions to the logarithmic Laplacian parabolic system
- Generalized quasi-linear fractional Wentzell problems
- Existence, symmetry, and regularity of ground states of a nonlinear Choquard equation in the hyperbolic space
- Normalized solutions for NLS equations with general nonlinearity on compact metric graphs
- Boundedness and global stability in a predator-prey chemotaxis system with indirect pursuit-evasion interaction and nonlocal kinetics
- Review Article
- Existence and stability of contact discontinuities to piston problems
Articles in the same Issue
- Research Articles
- Incompressible limit for the compressible viscoelastic fluids in critical space
- Concentrating solutions for double critical fractional Schrödinger-Poisson system with p-Laplacian in ℝ3
- Intervals of bifurcation points for semilinear elliptic problems
- On multiplicity of solutions to nonlinear Dirac equation with local super-quadratic growth
- Entire radial bounded solutions for Leray-Lions equations of (p, q)-type
- Combinatorial pth Calabi flows for total geodesic curvatures in spherical background geometry
- Sharp upper bounds for the capacity in the hyperbolic and Euclidean spaces
- Positive solutions for asymptotically linear Schrödinger equation on hyperbolic space
- Existence and non-degeneracy of the normalized spike solutions to the fractional Schrödinger equations
- Existence results for non-coercive problems
- Ground states for Schrödinger-Poisson system with zero mass and the Coulomb critical exponent
- Geometric characterization of generalized Hajłasz-Sobolev embedding domains
- Subharmonic solutions of first-order Hamiltonian systems
- Sharp asymptotic expansions of entire large solutions to a class of k-Hessian equations with weights
- Stability of pyramidal traveling fronts in time-periodic reaction–diffusion equations with degenerate monostable and ignition nonlinearities
- Ground-state solutions for fractional Kirchhoff-Choquard equations with critical growth
- Existence results of variable exponent double-phase multivalued elliptic inequalities with logarithmic perturbation and convections
- Homoclinic solutions in periodic partial difference equations
- Classical solution for compressible Navier-Stokes-Korteweg equations with zero sound speed
- Properties of minimizers for L2-subcritical Kirchhoff energy functionals
- Asymptotic behavior of global mild solutions to the Keller-Segel-Navier-Stokes system in Lorentz spaces
- Blow-up solutions to the Hartree-Fock type Schrödinger equation with the critical rotational speed
- Qualitative properties of solutions for dual fractional parabolic equations involving nonlocal Monge-Ampère operator
- Regularity for double-phase functionals with nearly linear growth and two modulating coefficients
- Uniform boundedness and compactness for the commutator of an extension of Riesz transform on stratified Lie groups
- Normalized solutions to nonlinear Schrödinger equations with mixed fractional Laplacians
- Existence of positive radial solutions of general quasilinear elliptic systems
- Low Mach number and non-resistive limit of magnetohydrodynamic equations with large temperature variations in general bounded domains
- Sharp viscous shock waves for relaxation model with degeneracy
- Bifurcation and multiplicity results for critical problems involving the p-Grushin operator
- Asymptotic behavior of solutions of a free boundary model with seasonal succession and impulsive harvesting
- Blowing-up solutions concentrated along minimal submanifolds for some supercritical Hamiltonian systems on Riemannian manifolds
- Stability of rarefaction wave for relaxed compressible Navier-Stokes equations with density-dependent viscosity
- Singularity for the macroscopic production model with Chaplygin gas
- Global strong solution of compressible flow with spherically symmetric data and density-dependent viscosities
- Global dynamics of population-toxicant models with nonlocal dispersals
- α-Mean curvature flow of non-compact complete convex hypersurfaces and the evolution of level sets
- High-energy solutions for coupled Schrödinger systems with critical growth and lack of compactness
- On the structure and lifespan of smooth solutions for the two-dimensional hyperbolic geometric flow equation
- Well-posedness for physical vacuum free boundary problem of compressible Euler equations with time-dependent damping
- On the existence of solutions of infinite systems of Volterra-Hammerstein-Stieltjes integral equations
- Remark on the analyticity of the fractional Fokker-Planck equation
- Continuous dependence on initial data for damped fourth-order wave equation with strain term
- Unilateral problems for quasilinear operators with fractional Riesz gradients
- Boundedness of solutions to quasilinear elliptic systems
- Existence of positive solutions for critical p-Laplacian equation with critical Neumann boundary condition
- Non-local diffusion and pulse intervention in a faecal-oral model with moving infected fronts
- Nonsmooth analysis of doubly nonlinear second-order evolution equations with nonconvex energy functionals
- Qualitative properties of solutions to the viscoelastic beam equation with damping and logarithmic nonlinear source terms
- Shape of extremal functions for weighted Sobolev-type inequalities
- One-dimensional boundary blow up problem with a nonlocal term
- Doubling measure and regularity to K-quasiminimizers of double-phase energy
- General solutions of weakly delayed discrete systems in 3D
- Global well-posedness of a nonlinear Boussinesq-fluid-structure interaction system with large initial data
- Optimal large time behavior of the 3D rate type viscoelastic fluids
- Local well-posedness for the two-component Benjamin-Ono equation
- Self-similar blow-up solutions of the four-dimensional Schrödinger-Wave system
- Existence and stability of traveling waves in a Keller-Segel system with nonlinear stimulation
- Existence and multiplicity of solutions for a class of superlinear p-Laplacian equations
- On the global large regular solutions of the 1D degenerate compressible Navier-Stokes equations
- Normal forms of piecewise-smooth monodromic systems
- Fractional Dirichlet problems with singular and non-locally convective reaction
- Sharp forced waves of degenerate diffusion equations in shifting environments
- Global boundedness and stability of a quasilinear two-species chemotaxis-competition model with nonlinear sensitivities
- Non-existence, radial symmetry, monotonicity, and Liouville theorem of master equations with fractional p-Laplacian
- Global existence, asymptotic behavior, and finite time blow up of solutions for a class of generalized thermoelastic system with p-Laplacian
- Formation of singularities for a linearly degenerate hyperbolic system arising in magnetohydrodynamics
- Linear stability and bifurcation analysis for a free boundary problem arising in a double-layered tumor model
- Hopf's lemma, asymptotic radial symmetry, and monotonicity of solutions to the logarithmic Laplacian parabolic system
- Generalized quasi-linear fractional Wentzell problems
- Existence, symmetry, and regularity of ground states of a nonlinear Choquard equation in the hyperbolic space
- Normalized solutions for NLS equations with general nonlinearity on compact metric graphs
- Boundedness and global stability in a predator-prey chemotaxis system with indirect pursuit-evasion interaction and nonlocal kinetics
- Review Article
- Existence and stability of contact discontinuities to piston problems