Asymptotic stability of the time-changed stochastic delay differential equations with Markovian switching
-
 and
and

Abstract
The aim of this work is to study the asymptotic stability of the time-changed stochastic delay differential equations (SDDEs) with Markovian switching. Some sufficient conditions for the asymptotic stability of solutions to the time-changed SDDEs are presented. In contrast to the asymptotic stability in existing articles, we present the new results on the stability of solutions to time-changed SDDEs, which is driven by time-changed Brownian motion. Finally, an example is given to demonstrate the effectiveness of the main results.
1 Introduction
The research on stochastic differential equations (SDEs) plays an important role in modeling dynamic system areas, such as physics, economics and finance, biological and so forth. Recently, the qualitative study of the solution of SDEs has received much attention. Particularly, the stability of SDEs has been considered widely by many researchers [1,2, 3,4]. It is well known that time delay is unavoidable in practice, then the corresponding stochastic delay differential equations (SDDEs) are used more widely in systems. It considers the effects of past behaviors imposed to the current status. The stability results of SDDEs we have mentioned here can be found in [5,6, 7,8]. The delay term has main influence on the stability of SDDEs. It could be regarded as a perturbation to the stable systems, or may be the delay part has a stabilizing effect as well [8]. Jump system is a new type of SDE with Markovian switching [9,10, 11,12]. In practice, the system can switch from one mode to another randomly, and the switching between the modes is governed by a Markov process. SDDE with Markovian switching is a kind of hybrid system, including both the logical switching mode and the state of system. It is used widely in many applied areas such as neural networks, traffic control model, and so on.
Very recently, Chlebak et al. [13] considered a sub-diffusion process in Hilbert space and the associated fractional Fokker-Planck-Kolmogorov equations. The process is connected with a limit process arising from continuous-time random walks. In fact, the limit process is a time-changed Lévy process, which is the first hitting time process of certain stable subordinator (see [14,15] for details). The existence and stability of SDEs driven by time-changed Brownian motion attracted lot of attention. Wu [16] established the time-changed Itô formula of time-changed SDE, and the stability analysis is investigated. Subsequently, Nane and Ni [17,18] established the Itô formula for time-changed Lévy noise, then discussed the asymptotic stability and path stability for the solution of time-changed SDEs with jump, respectively. And in [19], we considered the exponential stability for the time-changed stochastic functional differential equations with Markov switching.
Motivated strongly by the above, in this paper, we will study the stability of time-changed SDDEs with Markovian switching. By applying the time-changed Itô formula and Lyapunov function, we present the LaSalle-Type theorem [6,12] of the time-changed SDDEs with Markovian switching. More precisely, we consider the following SDDEs driven by time-changed Brownian motions:
on
In the remaining parts of this paper, further needed concepts and related background are presented in Section 2. In Section 3, the main stability results of the time-changed SDDEs with Markovian switching are given. Finally, an example is given to illustrate the effectiveness of the main results.
2 Preliminary
Throughout this paper, let
For an adapted
which is called the first hitting time process. And
Let
where
Let
Let
where
Let
and
where
and
At first, we introduce the important generalized time-changed Itô formula convenient for the subsequent stochastic calculation.
Lemma 2.1
(The generalized time-changed Itô formula) [19] Suppose that
where
In this paper, the following hypothesis is imposed on the coefficients
Both
for all
If
where
Lemma 2.2
(Semimartingale convergence theorem [3]) Let
If
where
3 Main results and discussion
In this section, we aim to establish the stability results of the system equation.
Theorem 3.1
Let conditions
and
where
for every
To prove this result, let us present an existence lemma at first.
Lemma 3.1
Under the conditions of Theorem 3.1, for any initial data
Proof
Under conditions
By the generalized time-changed Itô formula in Lemma 2.1,
By using conditions (3.1) and (3.2), we can see that
and
where we extend
This yields that
Taking
Now, let us prove our main results.
Proof of Theorem 3.1
We divide the proof into three steps.
Step 1. For any
and so on. Define the function
Then
where
Applying Lemma 2.2, the semimartingale convergence theorem yields that
Moreover,
Taking
this means
Step 2. If we set
We now claim that
If it is false, then
therefore, there exists a number
where
Since
Define the function
Clearly
On the other hand, by (3.4) we have
Therefore, it follows that
Since the initial data
where
It is easy to see from (3.10) and (3.12) that
In what follows, we define a sequence of stopping times,
Throughout this paper we set
Let
On the other hand, by the hypothesis (
whenever
Since
Furthermore, since
It follows from (3.16) that
This yields that
Recalling (3.17), we further compute
Set
noting that
we can derive from (3.15) and (3.18) that
it is a contradiction. So (3.9) must be hold.
Step 3. We first show that
For any
which implies
Now, we claim that
If it is not true, there exist some
therefore, there is a subsequence
for some
which contradicts with
Corollary 3.1
Let conditions
and
Then
for every
Proof
By condition (3.22),
4 Controllability of linear stochastic differential system
Let us consider the following linear SDE with delay:
on
The aim of this study is to design a delay-independent feedback controller with the form
becomes almost surely asymptotically stable. Here for each mode
Lemma 4.1
(The Schur complement [22]) Let
(Here, as usual, by
Theorem 4.1
If the following linear matrix inequalities (LMIs)
have the solutions
Then system (4.1) is almost surely asymptotically stable with the controller
Proof
Let
Note that
From the following inequality
it follows that
Then
where
By Lemma 4.1,
Let
then
where
and
By Lemma 4.1,
Let
Remark
If the controller
In this case, we can also consider the asymptotic stability by means of the LMIs just renew
In what follows, we shall give an example to show the aforementioned results.
Example 4.1
Let
Let
where
Next, let us design a feedback control
It is easy to verify that the LMIs
have the solution
Obviously,
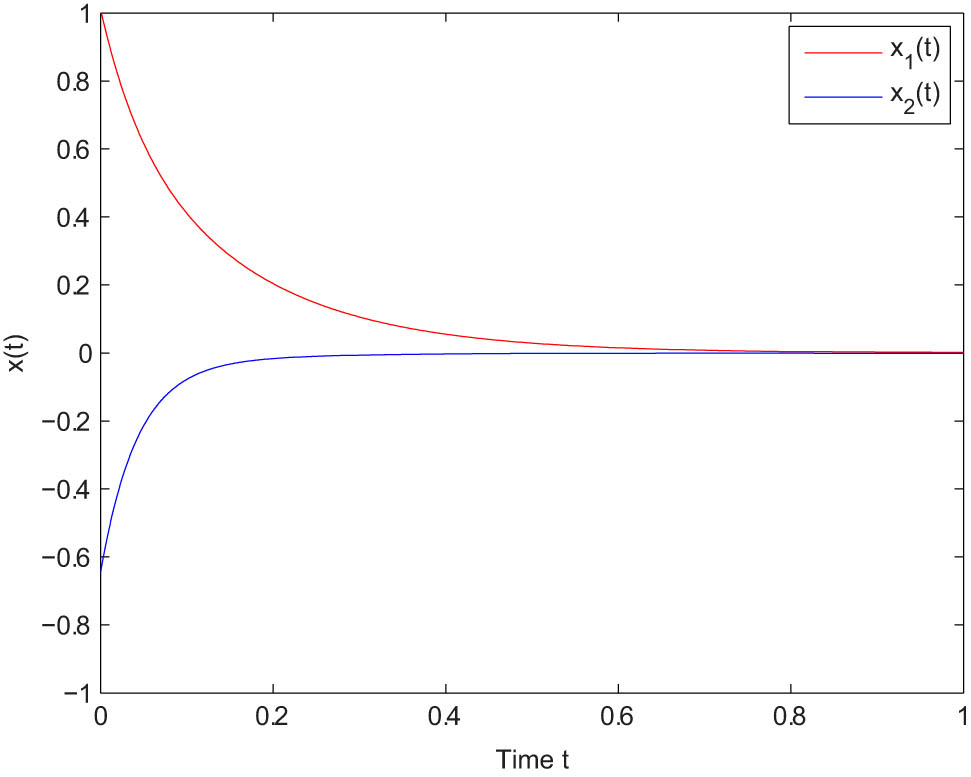
Asymptotic behavior in almost sure sense of the solution for equation (4.3).
5 Conclusions
The SDDEs driven by time-changed Brownian motions is a new research area for recent years. In this work, we have considered the asymptotic stability of the time-changed SDDEs with Markovian switching, by expanding the time-changed Itô formula and the time-changed semi-martingale convergence theorem. Our result generalizes that of SDDEs in the literature. Due to the more construction of SDDEs with time change than the usual SDDEs, our result is not a trivial generalization.
Acknowledgement
The authors would like to thank referee for valuable comments and careful reading, which leads to a great improvement of the article.
-
Funding information: This work was supported by the National Natural Science Foundation of China (11961037 and 11861040).
-
Conflict of interest: The authors declare that they have no competing interests.
References
[1] C. T. H. Baker and E. Buckwar , Exponential stability in p-th mean of solutions, and of convergent Euler-type solutions, of stochastic delay differential equations, J. Comput. Appl. Math. 184 (2005), no. 2, 404–427. 10.1016/j.cam.2005.01.018Search in Google Scholar
[2] X. Mao , Exponential Stability of Stochastic Differential Equations, Marcel Dekker, New York, 1994. Search in Google Scholar
[3] X. Mao , Stochastic Differential Equations and Applications, Horwood Publishing, UK, 2007. 10.1533/9780857099402Search in Google Scholar
[4] P. Protter , Stochastic Integration and Differential Equations, Springer-Verlag, Berlin Heidelberg, 2005. 10.1007/978-3-662-10061-5Search in Google Scholar
[5] D. Liu , G. Yang , and W. Zhang , The stability of neutral stochastic delay differential equations with Poisson jumps by fixed points, J. Comput. Appl. Math. 235 (2011), no. 10, 3115–3120. 10.1016/j.cam.2008.10.030Search in Google Scholar
[6] X. Mao , A note on the LaSalle-type theorem for stochastic differential delay equations, J. Math. Anal. Appl. 268 (2002), 125–142. 10.1006/jmaa.2001.7803Search in Google Scholar
[7] W. Zhu , J. Huang , X. Ruan , and Z. Zhao , Exponential stability of stochastic differential equation with mixed delay, J. Appl. Math. 2014 (2014), 187037. 10.1155/2014/187037Search in Google Scholar
[8] X. Mao , J. Lam , S. Xu , and H. Gao , Razumikhin method and exponential stability of hybrid stochastic delay interval systems, J. Math. Anal. Appl. 314 (2006), 45–66. 10.1016/j.jmaa.2005.03.056Search in Google Scholar
[9] B. Li , D. Li , and D. Xu , Stability analysis for impulsive stochastic delay differential equations with Markovian switching, J. Franklin Inst. 350 (2013), 1848–1864. 10.1016/j.jfranklin.2013.05.009Search in Google Scholar
[10] X. Mao and C. Yuan , Stochastic Differential Equations with Markovian Switching, Imperial College Press, London, 2006. 10.1142/p473Search in Google Scholar
[11] Y. Xu and Z. He , Exponential stability of neutral stochastic delay differential equations with Markovian switching, Appl. Math. Lett. 52 (2016), 64–73. 10.1016/j.aml.2015.08.019Search in Google Scholar
[12] C. Yuan and X. Mao , Robust stability and controllability of stochastic differential delay equations with Markovian switching, Automatica 40 (2004), no. 3, 343–354. 10.1016/j.automatica.2003.10.012Search in Google Scholar
[13] L. Chlebak , P. Garmirian , and Q. Wu , Sub-diffusion processes in Hilbert space and their associated stochastic differential equations and Fokker-Planck-Kolmogorov equations, arXiv:1610.00208v1 (2016). Search in Google Scholar
[14] J. Bertoin , Subordinators: Examples and applications , in: P. Bernard (ed.), Lectures on Probability Theory and Statistics, Lecture Notes in Mathematics , vol. 1717, Springer, Berlin, Heidelberg, 1999, pp. 1–91, https://doi.org/10.1007/978-3-540-48115-7_1 . 10.1007/978-3-540-48115-7_1Search in Google Scholar
[15] K. Kobayashi , Stochastic calculus for a time-changed semimartingale and the associated stochastic differential equations, J. Theoret. Probab. 24 (2011), 789–820. 10.1007/s10959-010-0320-9Search in Google Scholar
[16] Q. Wu , Stability analysis for a class of nonlinear time-changed systems, Cogent Math. 3 (2016), 1228273, https://doi.org/10.1080/23311835.2016.1228273 . 10.1080/23311835.2016.1228273Search in Google Scholar
[17] E. Nane and Y. Ni , Stability of the solution of stochastic differential equation driven by time-changed Lévy noise, Proc. Amer. Math. Soc. 145 (2017), no. 7, 3085–3104, https://doi.org/10.1090/proc/13447 .10.1090/proc/13447Search in Google Scholar
[18] E. Nane and Y. Ni , Path stability of stochastic differential equations driven by time-changed Lévy noises, ALEA, Lat. Am. J. Probab. Math. Stat. 15 (2018), 479–507, https://doi.org/10.30757/ALEA.v15-20 . 10.30757/ALEA.v15-20Search in Google Scholar
[19] X. Zhang and C. Yuan , Razumikhin-type theorem on time-changed stochastic functional differential equations with Markovian switching, Open Math. 17 (2019), 689–699, https://doi.org/10.1515/math-2019-0055 . 10.1515/math-2019-0055Search in Google Scholar
[20] M. Magdziarz , Path properties of subdiffusion – a martingale approach, Stoch. Models 26 (2010), no. 2, 256–271. 10.1080/15326341003756379Search in Google Scholar
[21] D. Xu , B. Li , S. Long , and L. Teng , Moment estimate and existence for solutions of stochastic functional differential equations, Nonlinear Anal. 108 (2014), 128–143. 10.1016/j.na.2014.05.004Search in Google Scholar
[22] S. Boyd , L. Ghaoui , E. Feron , and V. Balakrishnan , Linear Matrix Inequalities in System and Control Theory, SIAM Studies in Applied Mathematics, Philadelphia, 1994. 10.1137/1.9781611970777Search in Google Scholar
© 2021 Xiaozhi Zhang et al., published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Regular Articles
- Sharp conditions for the convergence of greedy expansions with prescribed coefficients
- Range-kernel weak orthogonality of some elementary operators
- Stability analysis for Selkov-Schnakenberg reaction-diffusion system
- On non-normal cyclic subgroups of prime order or order 4 of finite groups
- Some results on semigroups of transformations with restricted range
- Quasi-ideal Ehresmann transversals: The spined product structure
- On the regulator problem for linear systems over rings and algebras
- Solvability of the abstract evolution equations in Ls-spaces with critical temporal weights
- Resolving resolution dimensions in triangulated categories
- Entire functions that share two pairs of small functions
- On stochastic inverse problem of construction of stable program motion
- Pentagonal quasigroups, their translatability and parastrophes
- Counting certain quadratic partitions of zero modulo a prime number
- Global attractors for a class of semilinear degenerate parabolic equations
- A new implicit symmetric method of sixth algebraic order with vanished phase-lag and its first derivative for solving Schrödinger's equation
- On sub-class sizes of mutually permutable products
- Asymptotic solution of the Cauchy problem for the singularly perturbed partial integro-differential equation with rapidly oscillating coefficients and with rapidly oscillating heterogeneity
- Existence and asymptotical behavior of solutions for a quasilinear Choquard equation with singularity
- On kernels by rainbow paths in arc-coloured digraphs
- Fully degenerate Bell polynomials associated with degenerate Poisson random variables
- Multiple solutions and ground state solutions for a class of generalized Kadomtsev-Petviashvili equation
- A note on maximal operators related to Laplace-Bessel differential operators on variable exponent Lebesgue spaces
- Weak and strong estimates for linear and multilinear fractional Hausdorff operators on the Heisenberg group
- Partial sums and inclusion relations for analytic functions involving (p, q)-differential operator
- Hodge-Deligne polynomials of character varieties of free abelian groups
- Diophantine approximation with one prime, two squares of primes and one kth power of a prime
- The equivalent parameter conditions for constructing multiple integral half-discrete Hilbert-type inequalities with a class of nonhomogeneous kernels and their applications
- Boundedness of vector-valued sublinear operators on weighted Herz-Morrey spaces with variable exponents
- On some new quantum midpoint-type inequalities for twice quantum differentiable convex functions
- Quantum Ostrowski-type inequalities for twice quantum differentiable functions in quantum calculus
- Asymptotic measure-expansiveness for generic diffeomorphisms
- Infinitesimals via Cauchy sequences: Refining the classical equivalence
- The (1, 2)-step competition graph of a hypertournament
- Properties of multiplication operators on the space of functions of bounded φ-variation
- Disproving a conjecture of Thornton on Bohemian matrices
- Some estimates for the commutators of multilinear maximal function on Morrey-type space
- Inviscid, zero Froude number limit of the viscous shallow water system
- Inequalities between height and deviation of polynomials
- New criteria-based ℋ-tensors for identifying the positive definiteness of multivariate homogeneous forms
- Determinantal inequalities of Hua-Marcus-Zhang type for quaternion matrices
- On a new generalization of some Hilbert-type inequalities
- On split quaternion equivalents for Quaternaccis, shortly Split Quaternaccis
- On split regular BiHom-Poisson color algebras
- Asymptotic stability of the time-changed stochastic delay differential equations with Markovian switching
- The mixed metric dimension of flower snarks and wheels
- Oscillatory bifurcation problems for ODEs with logarithmic nonlinearity
- The B-topology on S∗-doubly quasicontinuous posets
- Hyers-Ulam stability of isometries on bounded domains
- Inhomogeneous conformable abstract Cauchy problem
- Path homology theory of edge-colored graphs
- Refinements of quantum Hermite-Hadamard-type inequalities
- Symmetric graphs of valency seven and their basic normal quotient graphs
- Mean oscillation and boundedness of multilinear operator related to multiplier operator
- Numerical methods for time-fractional convection-diffusion problems with high-order accuracy
- Several explicit formulas for (degenerate) Narumi and Cauchy polynomials and numbers
- Finite groups whose intersection power graphs are toroidal and projective-planar
- On primitive solutions of the Diophantine equation x2 + y2 = M
- A note on polyexponential and unipoly Bernoulli polynomials of the second kind
- On the type 2 poly-Bernoulli polynomials associated with umbral calculus
- Some estimates for commutators of Littlewood-Paley g-functions
- Construction of a family of non-stationary combined ternary subdivision schemes reproducing exponential polynomials
- On the evolutionary bifurcation curves for the one-dimensional prescribed mean curvature equation with logistic type
- On intersections of two non-incident subgroups of finite p-groups
- Global existence and boundedness in a two-species chemotaxis system with nonlinear diffusion
- Finite groups with 4p2q elements of maximal order
- Positive solutions of a discrete nonlinear third-order three-point eigenvalue problem with sign-changing Green's function
- Power moments of automorphic L-functions related to Maass forms for SL3(ℤ)
- Entire solutions for several general quadratic trinomial differential difference equations
- Strong consistency of regression function estimator with martingale difference errors
- Fractional Hermite-Hadamard-type inequalities for interval-valued co-ordinated convex functions
- Montgomery identity and Ostrowski-type inequalities via quantum calculus
- Universal inequalities of the poly-drifting Laplacian on smooth metric measure spaces
- On reducible non-Weierstrass semigroups
- so-metrizable spaces and images of metric spaces
- Some new parameterized inequalities for co-ordinated convex functions involving generalized fractional integrals
- The concept of cone b-Banach space and fixed point theorems
- Complete consistency for the estimator of nonparametric regression model based on m-END errors
- A posteriori error estimates based on superconvergence of FEM for fractional evolution equations
- Solution of integral equations via coupled fixed point theorems in 𝔉-complete metric spaces
- Symmetric pairs and pseudosymmetry of Θ-Yetter-Drinfeld categories for Hom-Hopf algebras
- A new characterization of the automorphism groups of Mathieu groups
- The role of w-tilting modules in relative Gorenstein (co)homology
- Primitive and decomposable elements in homology of ΩΣℂP∞
- The G-sequence shadowing property and G-equicontinuity of the inverse limit spaces under group action
- Classification of f-biharmonic submanifolds in Lorentz space forms
- Some new results on the weaving of K-g-frames in Hilbert spaces
- Matrix representation of a cross product and related curl-based differential operators in all space dimensions
- Global optimization and applications to a variational inequality problem
- Functional equations related to higher derivations in semiprime rings
- A partial order on transformation semigroups with restricted range that preserve double direction equivalence
- On multi-step methods for singular fractional q-integro-differential equations
- Compact perturbations of operators with property (t)
- Entire solutions for several complex partial differential-difference equations of Fermat type in ℂ2
- Random attractors for stochastic plate equations with memory in unbounded domains
- On the convergence of two-step modulus-based matrix splitting iteration method
- On the separation method in stochastic reconstruction problem
- Robust estimation for partial functional linear regression models based on FPCA and weighted composite quantile regression
- Structure of coincidence isometry groups
- Sharp function estimates and boundedness for Toeplitz-type operators associated with general fractional integral operators
- Oscillatory hyper-Hilbert transform on Wiener amalgam spaces
- Euler-type sums involving multiple harmonic sums and binomial coefficients
- Poly-falling factorial sequences and poly-rising factorial sequences
- Geometric approximations to transition densities of Jump-type Markov processes
- Multiple solutions for a quasilinear Choquard equation with critical nonlinearity
- Bifurcations and exact traveling wave solutions for the regularized Schamel equation
- Almost factorizable weakly type B semigroups
- The finite spectrum of Sturm-Liouville problems with n transmission conditions and quadratic eigenparameter-dependent boundary conditions
- Ground state sign-changing solutions for a class of quasilinear Schrödinger equations
- Epi-quasi normality
- Derivative and higher-order Cauchy integral formula of matrix functions
- Commutators of multilinear strongly singular integrals on nonhomogeneous metric measure spaces
- Solutions to a multi-phase model of sea ice growth
- Existence and simulation of positive solutions for m-point fractional differential equations with derivative terms
- Bernstein-Walsh type inequalities for derivatives of algebraic polynomials in quasidisks
- Review Article
- Semiprimeness of semigroup algebras
- Special Issue on Problems, Methods and Applications of Nonlinear Analysis (Part II)
- Third-order differential equations with three-point boundary conditions
- Fractional calculus, zeta functions and Shannon entropy
- Uniqueness of positive solutions for boundary value problems associated with indefinite ϕ-Laplacian-type equations
- Synchronization of Caputo fractional neural networks with bounded time variable delays
- On quasilinear elliptic problems with finite or infinite potential wells
- Deterministic and random approximation by the combination of algebraic polynomials and trigonometric polynomials
- On a fractional Schrödinger-Poisson system with strong singularity
- Parabolic inequalities in Orlicz spaces with data in L1
- Special Issue on Evolution Equations, Theory and Applications (Part II)
- Impulsive Caputo-Fabrizio fractional differential equations in b-metric spaces
- Existence of a solution of Hilfer fractional hybrid problems via new Krasnoselskii-type fixed point theorems
- On a nonlinear system of Riemann-Liouville fractional differential equations with semi-coupled integro-multipoint boundary conditions
- Blow-up results of the positive solution for a class of degenerate parabolic equations
- Long time decay for 3D Navier-Stokes equations in Fourier-Lei-Lin spaces
- On the extinction problem for a p-Laplacian equation with a nonlinear gradient source
- General decay rate for a viscoelastic wave equation with distributed delay and Balakrishnan-Taylor damping
- On hyponormality on a weighted annulus
- Exponential stability of Timoshenko system in thermoelasticity of second sound with a memory and distributed delay term
- Convergence results on Picard-Krasnoselskii hybrid iterative process in CAT(0) spaces
- Special Issue on Boundary Value Problems and their Applications on Biosciences and Engineering (Part I)
- Marangoni convection in layers of water-based nanofluids under the effect of rotation
- A transient analysis to the M(τ)/M(τ)/k queue with time-dependent parameters
- Existence of random attractors and the upper semicontinuity for small random perturbations of 2D Navier-Stokes equations with linear damping
- Degenerate binomial and Poisson random variables associated with degenerate Lah-Bell polynomials
- Special Issue on Fractional Problems with Variable-Order or Variable Exponents (Part I)
- On the mixed fractional quantum and Hadamard derivatives for impulsive boundary value problems
- The Lp dual Minkowski problem about 0 < p < 1 and q > 0
Articles in the same Issue
- Regular Articles
- Sharp conditions for the convergence of greedy expansions with prescribed coefficients
- Range-kernel weak orthogonality of some elementary operators
- Stability analysis for Selkov-Schnakenberg reaction-diffusion system
- On non-normal cyclic subgroups of prime order or order 4 of finite groups
- Some results on semigroups of transformations with restricted range
- Quasi-ideal Ehresmann transversals: The spined product structure
- On the regulator problem for linear systems over rings and algebras
- Solvability of the abstract evolution equations in Ls-spaces with critical temporal weights
- Resolving resolution dimensions in triangulated categories
- Entire functions that share two pairs of small functions
- On stochastic inverse problem of construction of stable program motion
- Pentagonal quasigroups, their translatability and parastrophes
- Counting certain quadratic partitions of zero modulo a prime number
- Global attractors for a class of semilinear degenerate parabolic equations
- A new implicit symmetric method of sixth algebraic order with vanished phase-lag and its first derivative for solving Schrödinger's equation
- On sub-class sizes of mutually permutable products
- Asymptotic solution of the Cauchy problem for the singularly perturbed partial integro-differential equation with rapidly oscillating coefficients and with rapidly oscillating heterogeneity
- Existence and asymptotical behavior of solutions for a quasilinear Choquard equation with singularity
- On kernels by rainbow paths in arc-coloured digraphs
- Fully degenerate Bell polynomials associated with degenerate Poisson random variables
- Multiple solutions and ground state solutions for a class of generalized Kadomtsev-Petviashvili equation
- A note on maximal operators related to Laplace-Bessel differential operators on variable exponent Lebesgue spaces
- Weak and strong estimates for linear and multilinear fractional Hausdorff operators on the Heisenberg group
- Partial sums and inclusion relations for analytic functions involving (p, q)-differential operator
- Hodge-Deligne polynomials of character varieties of free abelian groups
- Diophantine approximation with one prime, two squares of primes and one kth power of a prime
- The equivalent parameter conditions for constructing multiple integral half-discrete Hilbert-type inequalities with a class of nonhomogeneous kernels and their applications
- Boundedness of vector-valued sublinear operators on weighted Herz-Morrey spaces with variable exponents
- On some new quantum midpoint-type inequalities for twice quantum differentiable convex functions
- Quantum Ostrowski-type inequalities for twice quantum differentiable functions in quantum calculus
- Asymptotic measure-expansiveness for generic diffeomorphisms
- Infinitesimals via Cauchy sequences: Refining the classical equivalence
- The (1, 2)-step competition graph of a hypertournament
- Properties of multiplication operators on the space of functions of bounded φ-variation
- Disproving a conjecture of Thornton on Bohemian matrices
- Some estimates for the commutators of multilinear maximal function on Morrey-type space
- Inviscid, zero Froude number limit of the viscous shallow water system
- Inequalities between height and deviation of polynomials
- New criteria-based ℋ-tensors for identifying the positive definiteness of multivariate homogeneous forms
- Determinantal inequalities of Hua-Marcus-Zhang type for quaternion matrices
- On a new generalization of some Hilbert-type inequalities
- On split quaternion equivalents for Quaternaccis, shortly Split Quaternaccis
- On split regular BiHom-Poisson color algebras
- Asymptotic stability of the time-changed stochastic delay differential equations with Markovian switching
- The mixed metric dimension of flower snarks and wheels
- Oscillatory bifurcation problems for ODEs with logarithmic nonlinearity
- The B-topology on S∗-doubly quasicontinuous posets
- Hyers-Ulam stability of isometries on bounded domains
- Inhomogeneous conformable abstract Cauchy problem
- Path homology theory of edge-colored graphs
- Refinements of quantum Hermite-Hadamard-type inequalities
- Symmetric graphs of valency seven and their basic normal quotient graphs
- Mean oscillation and boundedness of multilinear operator related to multiplier operator
- Numerical methods for time-fractional convection-diffusion problems with high-order accuracy
- Several explicit formulas for (degenerate) Narumi and Cauchy polynomials and numbers
- Finite groups whose intersection power graphs are toroidal and projective-planar
- On primitive solutions of the Diophantine equation x2 + y2 = M
- A note on polyexponential and unipoly Bernoulli polynomials of the second kind
- On the type 2 poly-Bernoulli polynomials associated with umbral calculus
- Some estimates for commutators of Littlewood-Paley g-functions
- Construction of a family of non-stationary combined ternary subdivision schemes reproducing exponential polynomials
- On the evolutionary bifurcation curves for the one-dimensional prescribed mean curvature equation with logistic type
- On intersections of two non-incident subgroups of finite p-groups
- Global existence and boundedness in a two-species chemotaxis system with nonlinear diffusion
- Finite groups with 4p2q elements of maximal order
- Positive solutions of a discrete nonlinear third-order three-point eigenvalue problem with sign-changing Green's function
- Power moments of automorphic L-functions related to Maass forms for SL3(ℤ)
- Entire solutions for several general quadratic trinomial differential difference equations
- Strong consistency of regression function estimator with martingale difference errors
- Fractional Hermite-Hadamard-type inequalities for interval-valued co-ordinated convex functions
- Montgomery identity and Ostrowski-type inequalities via quantum calculus
- Universal inequalities of the poly-drifting Laplacian on smooth metric measure spaces
- On reducible non-Weierstrass semigroups
- so-metrizable spaces and images of metric spaces
- Some new parameterized inequalities for co-ordinated convex functions involving generalized fractional integrals
- The concept of cone b-Banach space and fixed point theorems
- Complete consistency for the estimator of nonparametric regression model based on m-END errors
- A posteriori error estimates based on superconvergence of FEM for fractional evolution equations
- Solution of integral equations via coupled fixed point theorems in 𝔉-complete metric spaces
- Symmetric pairs and pseudosymmetry of Θ-Yetter-Drinfeld categories for Hom-Hopf algebras
- A new characterization of the automorphism groups of Mathieu groups
- The role of w-tilting modules in relative Gorenstein (co)homology
- Primitive and decomposable elements in homology of ΩΣℂP∞
- The G-sequence shadowing property and G-equicontinuity of the inverse limit spaces under group action
- Classification of f-biharmonic submanifolds in Lorentz space forms
- Some new results on the weaving of K-g-frames in Hilbert spaces
- Matrix representation of a cross product and related curl-based differential operators in all space dimensions
- Global optimization and applications to a variational inequality problem
- Functional equations related to higher derivations in semiprime rings
- A partial order on transformation semigroups with restricted range that preserve double direction equivalence
- On multi-step methods for singular fractional q-integro-differential equations
- Compact perturbations of operators with property (t)
- Entire solutions for several complex partial differential-difference equations of Fermat type in ℂ2
- Random attractors for stochastic plate equations with memory in unbounded domains
- On the convergence of two-step modulus-based matrix splitting iteration method
- On the separation method in stochastic reconstruction problem
- Robust estimation for partial functional linear regression models based on FPCA and weighted composite quantile regression
- Structure of coincidence isometry groups
- Sharp function estimates and boundedness for Toeplitz-type operators associated with general fractional integral operators
- Oscillatory hyper-Hilbert transform on Wiener amalgam spaces
- Euler-type sums involving multiple harmonic sums and binomial coefficients
- Poly-falling factorial sequences and poly-rising factorial sequences
- Geometric approximations to transition densities of Jump-type Markov processes
- Multiple solutions for a quasilinear Choquard equation with critical nonlinearity
- Bifurcations and exact traveling wave solutions for the regularized Schamel equation
- Almost factorizable weakly type B semigroups
- The finite spectrum of Sturm-Liouville problems with n transmission conditions and quadratic eigenparameter-dependent boundary conditions
- Ground state sign-changing solutions for a class of quasilinear Schrödinger equations
- Epi-quasi normality
- Derivative and higher-order Cauchy integral formula of matrix functions
- Commutators of multilinear strongly singular integrals on nonhomogeneous metric measure spaces
- Solutions to a multi-phase model of sea ice growth
- Existence and simulation of positive solutions for m-point fractional differential equations with derivative terms
- Bernstein-Walsh type inequalities for derivatives of algebraic polynomials in quasidisks
- Review Article
- Semiprimeness of semigroup algebras
- Special Issue on Problems, Methods and Applications of Nonlinear Analysis (Part II)
- Third-order differential equations with three-point boundary conditions
- Fractional calculus, zeta functions and Shannon entropy
- Uniqueness of positive solutions for boundary value problems associated with indefinite ϕ-Laplacian-type equations
- Synchronization of Caputo fractional neural networks with bounded time variable delays
- On quasilinear elliptic problems with finite or infinite potential wells
- Deterministic and random approximation by the combination of algebraic polynomials and trigonometric polynomials
- On a fractional Schrödinger-Poisson system with strong singularity
- Parabolic inequalities in Orlicz spaces with data in L1
- Special Issue on Evolution Equations, Theory and Applications (Part II)
- Impulsive Caputo-Fabrizio fractional differential equations in b-metric spaces
- Existence of a solution of Hilfer fractional hybrid problems via new Krasnoselskii-type fixed point theorems
- On a nonlinear system of Riemann-Liouville fractional differential equations with semi-coupled integro-multipoint boundary conditions
- Blow-up results of the positive solution for a class of degenerate parabolic equations
- Long time decay for 3D Navier-Stokes equations in Fourier-Lei-Lin spaces
- On the extinction problem for a p-Laplacian equation with a nonlinear gradient source
- General decay rate for a viscoelastic wave equation with distributed delay and Balakrishnan-Taylor damping
- On hyponormality on a weighted annulus
- Exponential stability of Timoshenko system in thermoelasticity of second sound with a memory and distributed delay term
- Convergence results on Picard-Krasnoselskii hybrid iterative process in CAT(0) spaces
- Special Issue on Boundary Value Problems and their Applications on Biosciences and Engineering (Part I)
- Marangoni convection in layers of water-based nanofluids under the effect of rotation
- A transient analysis to the M(τ)/M(τ)/k queue with time-dependent parameters
- Existence of random attractors and the upper semicontinuity for small random perturbations of 2D Navier-Stokes equations with linear damping
- Degenerate binomial and Poisson random variables associated with degenerate Lah-Bell polynomials
- Special Issue on Fractional Problems with Variable-Order or Variable Exponents (Part I)
- On the mixed fractional quantum and Hadamard derivatives for impulsive boundary value problems
- The Lp dual Minkowski problem about 0 < p < 1 and q > 0