
In-plane nonlinear postbuckling and buckling analysis of Lee’s frame using absolute nodal coordinate formulation
-
Abdur Rahman Shaukat
 ,
Jia Wang
,
Jia Wang

Abstract
In this study, four absolute nodal coordinate formulation (ANCF)-based approaches are utilized in order to predict the buckling load of Lee’s frame under concentrated load. The first approach employs the standard two-dimensional shear deformable ANCF beam element based on the general continuum mechanics (GCM). The second approach adopts the standard ANCF beam element modified by the locking alleviation technique known as the strain-split method. The third approach has the standard ANCF beam element with strain energy modified by the enhanced continuum mechanics formulation. The fourth approach utilizes the higher-order ANCF beam element based on the GCM. Two buckling load estimation methods are used, i.e., by tracing the nonlinear equilibrium path of the load–displacement space using the arc-length method and applying the energy criterion, which requires tracking eigenvalues through the dichotomy scheme. Lee’s frame with different boundary conditions including pinned–pinned, fixed-pinned, pinned-fixed, and fixed–fixed are studied. The complex nonlinear responses in the form of snap-through, snap-back, and looping phenomena during nonlinear postbuckling analysis are simulated. The critical buckling loads and buckling mode shapes obtained through the energy criterion-based buckling method are obtained. After the comparison, higher-order beam element is found to be more accurate, stable, and consistent among the studied approaches.
1 Introduction
Absolute nodal coordinate formulation (ANCF) is a nonincremental nonlinear finite-element formulation originally proposed for the dynamics analysis of large-deformation and large-rotation multibody systems by Shabana [1]. ANCF utilizes the global nodal position and gradients as degrees of freedom (DOFs). Consequently, the formulation leads to a constant mass matrix in the equations of motion and further leads to zero centrifugal and Coriolis forces [2]. Additionally, it imposes no restrictions on the amount of rotation or deformation within the ANCF element and is consistent with the theory of nonlinear general continuum mechanics (GCM) [3]. Due to the above merits, ANCF has been applied in the nonlinear dynamics analysis of vehicle chassis with leaf spring systems [4,5,6], space structures [7,8,9], and soft robotics [3,10,11,12]. In addition, the capabilities of ANCF in the nonlinear static analysis have also been verified by some benchmark problems [13,14]. Therefore, ANCF which was originally proposed to study nonlinear dynamics is useful in the nonlinear static analysis while new elements are regularly being introduced [15].
Compared with the existing application in the nonlinear dynamics and static analysis, the potential of the ANCF method in the nonlinear postbuckling and buckling analysis needs further exploration. Some pioneering efforts in the direction of ANCF-based buckling analysis include works by several groups, as discussed subsequently. Luo et al. proposed a new hyper-elastic ANCF shell element utilizing the Kirchoff–Love theory and used the arc-length method to trace the whole nonlinear equilibrium path in the load–displacement space of the cylindrical shells [16]. Similarly, a new elastoplastic thin shell ANCF element based on the Kirchoff–Love theory and layered plastic model was introduced by Li et al. to predict the nonlinear response [17]. In these studies, the use of ANCF shell elements has been verified in the postbuckling analysis of the classical shell structure, but the ANCF beam element still needs to be assessed against the benchmark example for the postbuckling structural analysis. Nachbagauer et al. constructed a three-node beam element and traced the nonlinear equilibrium path of a right-angle frame under end force by utilizing the nonlinear static iteration method with a small perturbation load [18]. Nachbagauer and Gerstmayr used the enhanced continuum mechanics-based and structural mechanics-based formulation in the buckling analysis, while the standard continuum mechanics-based formulation was not assessed. Recently, Shaukat et al. tested three ANCF beam-based approaches in conjunction with the arc-length method on the in-plane nonlinear postbuckling of the circular arches [19]. In the meantime, Wang and Wang used the energy criterion-based dichotomy scheme to find the critical buckling load of the right angle frame [20]. The conceptual difference between the energy criterion-based dichotomy scheme and the other studies mentioned here is that the perfect geometric configuration is not destroyed while finding the critical buckling load. On the contrary, the arc-length method-based limit point postbuckling load solutions are bound to allow the large deformation for the algorithm to work. Hence, the perfect geometry is not preserved. In the current study, both methods of buckling load estimations are utilized to analyze the benchmark problem of the beam–column structure of Lee’s frame.
A recent rise in interest in the nonlinear behavior of structures has led researchers to see the instability in a new light marking the shift from the “buckliphobia to buckliphilia” [21], some referring to it as “well-behaved nonlinear structure” [22], and others calling it “Happy Catastrophe” [23]. However, by using the mechanical instabilities of the new smart material design, new application areas can be explored in the direction of soft machines with sensing, actuating, and control capabilities [24]. Hence, it is imperative to keep exploring the use of advanced numerical techniques, especially of nonlinear beam models such as ANCF beam, which are more general than the Bernoulli–Euler and Timoshenko beam-based FEM models. For the time being, ANCF has been proven suitable to handle flexible beams, and it also provides straightforward integration between MBS and nonlinear FEM algorithms [25]. Although it completely supports the use of GCM-based nonlinear material laws [26,27,28]. Due to the above-mentioned favorable characteristics of ANCF, its use in the design of new smart material-based structures needs to be further explored. Comparatively, ANCF-based elastoplastic analysis can be useful for snap-based designing, shape morphing, and multi-stable mechanical components. In the future, ANCF can be a good numerical tool for snap-based designing. This study is a small step in this direction to show that ANCF can be successfully used to study the nonlinear buckling and postbuckling behavior of the framed structures. In addition, it can effectively trace the complex nonlinear equilibrium paths in the load–displacement space of Lee’s frame.
The article aims to thoroughly assess the performance of the ANCF beam element on the nonlinear postbuckling and buckling analysis of the benchmark Lee’s frame. To achieve this, the arc-length method and the energy criteria method are implemented. The standard continuum mechanics-based lower-order beam element/higher-order beam element (HOBE) and the modified one using two locking alleviation methods are tested and compared. The study proves ANCF as a new tool that can be effectively used in the future to explore the nonlinear space for the snap-based design of flexible, soft smart structures, sensors, actuators, or energy-harvesting mechanisms.
The article is organized as follows: In Section 2, a brief literature review of frame analysis and the motivation to use the physics-based ANCF is described. In Section 3, the ANCF beam element and the modified one using the locking alleviation methods are introduced. Subsequently, the nonlinear postbuckling and buckling analysis methods employed are presented in Section 4. In Section 5, the numerical cases in order to verify the capability of the ANCF beam elements for the nonlinear postbuckling and buckling analysis of Lee’s frame are presented. In Section 6, the conclusion is drawn based on the gathered insights.
2 Overview of postbuckling analysis of frames
The slender frames are used in mechanical, civil, and aerospace engineering design [29]. Early researchers such as Timoshenko and Gere systematically studied the buckling of the right-angle frame using the analytical method [30]. Then, Koiter showed the imperfection sensitivity of the load-carrying simple frames by applying the perturbation technique [31]. Later, Roorda and Chilver utilized first- and second-order perturbation to estimate the bifurcation loads for the two-bar problem [32]. Lee et al. were the first to obtain the nonlinear path for the frame deflection by using the numerical technique of the modified Newton–Raphson method. The numerical example studied by Lee et al. became the benchmark now commonly referred to as “Lee’s frame” [33]. Akoush et al. obtained the critical buckling loads and the nonlinear equilibrium path for the framed structures utilizing incremental nonlinear analysis. The nonlinear strain–displacement relationships were used with the continuous updating of the stiffness matrix to incorporate the nonlinear geometric effects [34]. Parametric nonlinear analysis was done on rotationally constrained rigid jointed frames, which are loaded symmetrically and asymmetrically, to study the effects of load eccentricity and slenderness ratio by Simitses et al. [35,36,37]. Pignataro and Rizzi investigated the local and global buckling modes exhibiting unstable postbuckling behavior by conducting the imperfection sensitivity of the asymmetric portal frame. It was found that the presence of multiple buckling modes enhances the imperfection sensitivity of the portal frame [38,39,40]. Pacsote and Eriksson compared the total Lagrangian-based element against the co-rotational based beam element approaches in their study of the nonlinear postbuckling analysis of the framed structures. It was found that there is no considerable difference in the results for the large deformation cases of moderate nature [41]. Waszczyszyn and Janus-Michalska used the exact finite elements (EFEs) by directly integrating the complete field equations obtained from formulating two-point boundary value problem. They found that the number of elements required in the in-plane nonlinear analysis of the slender frames using EFEs is less than using standard finite elements [42]. The effect of initial imperfections, geometric properties, and boundary conditions on the nonlinear postbuckling behavior of the frame structure was studied in detail by Galvão et al. to help improve the engineering design and analysis of elastic frames [43]. Basaglia et al. used generalized beam theory-based beam finite elements to study the local, distortional, and global postbuckling behavior of thin-walled steel frames [44]. Yeong-Bin and Shyh-Rong studied extensively the nonlinear behavior of the framed structures under compressive loads and different boundary conditions [45]. In their recent article, they summarized the different analytical techniques and numerical methods utilized to study the frames [46]. They also pointed out that if the physics-based finite element, along with the incremental-iterative arc-length method, is utilized to simulate the complex multi-loop nonlinear postbuckling behavior, the overall process can be made simpler and more effective. As the physics-based finite element completely respects the rigid body displacements at each step, making the overall efficiency much better. Hence, this study is conducted to evaluate the feasibility and effectiveness of ANCF in nonlinear frame analysis.
3 Theoretical background of ANCF
Absolute nodal coordinates and nodal slopes are used in the discretization scheme built in the framework of ANCF. Therefore, infinitesimal and finite rotation assumptions which are used in the infinitesimal rotation elements, large rotation vector elements, and incremental-rotation corotational formulations are relaxed. Consequently, the mass matrix remains constant in the equation of motion. Additionally, the Coriolis and centrifugal forces become zero in the equation of motion [2]. The large displacement, large rotation, and large deformation analysis by means of ANCF require straightforward implementation [14]. For the sake of convenience, the four ANCF-based approaches being utilized in this study are briefly outlined in the following sub-sections.
3.1 Omar-Shabana beam element (OmSh)
The standard two-dimensional shear deformable ANCF beam element in which elastic forces are derived using the GCM approach is abbreviated as “OmSh” in this study [47]. For this OmSh element, the assumed displacement field in the global coordinate system is defined as follows:
Then, the position vector of an arbitrary point on the beam is obtained by
The element has two nodes, while the position vector
where
where
where
where
where
where
where
The elastic force can be obtained by differentiating the elastic energy with respect to the nodal vector as follows:
Then, the tangential stiffness matrix will be obtained by derivation of elastic force by the nodal coordinate vector as follows:
where the numbers represent the position of stress and strain component in the corresponding vectors.
3.2 Omar–Shabana beam element with Strain Split Method (OS-SSM)
SSM was originally proposed by Patel and Shabana in order to alleviate the locking problem present in the standard Omar–Shabana ANCF beam element [48]. For the SSM approach, the assumed displacement field equations remain as shown in Eq. (1). This approach is abbreviated as “OS-SSM” in this study. Locking alleviation was achieved by decoupling the higher-order strain terms found in the axial strain and the transverse strain. In this approach, the position field of the beam element is defined as follows:
where the superscript
where
The second Piola–Kirchoff stress in the Voigt form is expressed as
where
The strain energy in the form of stress and strain vector is shown in the above equation. Then, the elastic force and tangential stiffness matrix are calculated using the formulation shown in Section 3.1. Complete derivation for SSM and further details about how to use it for curved geometries can be found in the study of Patel and Shabana [48].
3.3 Enhanced continuum mechanics formulation (OS-EnCM)
The standard Omar–Shabana (OmSh) beam element has been found to have Poisson locking because of the axial strain and transverse strain coupling in the energy formulation. To avoid this, Gerstmayr et al. [49] proposed the method known as enhanced continuum mechanics formulation in which the strain energy is calculated in two parts. In this way, the Poisson effect is excluded in the transverse direction, and the Poisson effect is included only in the beam centerline. This approach is utilized in the Omar–Shabana beam element framework, hence, abbreviated as “OS-EnCM.” The assumed displacement field equation for this approach is shown in Eq. (1). The formulation for strain energy is as follows:
where b is the thickness of the element; the first part excludes the Poisson effect with the help of the modified matrix of elastic coefficients given as follows:
where
which includes the Poisson effect in the transverse direction. Then, the elastic force vector is given as follows:
where
where the numbers show the components in the corresponding vectors. The total tangential stiffness matrix is the sum of the two as follows:
3.4 Higher order beam element (HOBE)
In the locking alleviation article, Patel and Shabana also proposed a new two-dimensional HOBE with 16 DOFs [48]. The HOBE adopts cubic interpolation in the longitudinal direction and quadratic interpolation in the transverse direction. The higher order interpolation allows capturing the complex deformation modes and also allows curvature level continuity on the elemental nodes. The transverse strain does not remain constant, thus allowing the easing of the Poisson locking, especially in the large deformation analysis. This element can also be directly derived as a two-dimensional subset from the three-dimensional HOBE proposed by Shen et al. [50], which was later found to be useful in the study of lateral buckling by Orzechowski and Shabana [51]. For HOBEs, the assumed displacement field in the global coordinate system is defined as follows:
The element nodal coordinate vector for the HOBE is defined as follows:
Correspondingly, the element has the second-order gradient
where
The strain energy, elastic force, and stiffness matrix derivation follow the GCM-based approach. The strain energy for HOBE is given by
Furthermore, elastic force and tangential stiffness matrix are calculated, as shown in Section 3.1.
3.5 Slope discontinuity modeling using ANCF
As the gradient is not continuous at the rigid joint of Lee’s frame, it requires special attention. Therefore, the technique to model the slope discontinuity using ANCF finite element is briefly described here. The utilization of a constant coordinate transformation matrix to deal with the slope discontinuity in the ANCF modeling was demonstrated by Shabana and Mikkola [52]. Specifically, an additional global parameterization is introduced to unify the gradients on the intersection node k, where the gradients
where the transformation matrix T mk at node k in the element m is obtained as follows:
where the transformation coefficients
where x
n
, n = 1, 2, represent the first and second element coordinates, S
l
is the lth row of the shape function matrix,
3.6 Boundary conditions
For the boundary conditions used throughout this study, the following expressions are used. For the pinned boundary condition, the x and y components of the absolute nodal coordinate positions are constraints, so that it is pinned but can rotate:
where n is the number of components in the nodal coordinate vector; for OmSh, OS-SSM, and OS-EnCM, its value is 12, whereas for HOBE, it is 16. For the fixed boundary condition, all the components of the nodal coordinate vector at that node are constraints, so that neither it can move nor can rotate as shown below:
where m is half the number of components in the nodal coordinate vector m = n/2.
3.7 ANCF finite-element formulation for the framed structure
The nodal coordinate vector obtained from the different elements, as presented in the previous section, should be transformed. First, to incorporate the boundary conditions and secondly, to include the slope discontinuity in the right angle frame as shown:
Similarly, for the elastic force calculation, the two effects are included as follows:
And, the tangential stiffness matrix is shown below:
The equation of the virtual work of stresses according to the GCM theory can be obtained by utilizing the Green–Lagrange strain and the second Piola–Kirchoff stress as shown below:
The virtual strain can be expressed as the virtual changes in the position vector gradients as follows:
The second Piola–Kirchoff stresses are calculated from the Green–Lagrange strains as follows:
where E is the matrix of the elastic coefficient used to define the constitutive relationship. Hence, the virtual work in Eq. (38) can be written as follows:
where Q s is the vector of the elastics forces. The virtual work of an external force F acting at a point on the nodal coordinate vector can be found as follows:
Hence, utilizing the principle of virtual work for the static analysis, one can write
After incorporating the boundary conditions and slope discontinuity, it can be expressed as follows:
Which for the equation of the static equilibrium can be written as follows:
The above equation describes the static equilibrium, which can be solved using the nonlinear solver such as the Newton–Raphson method or arc-length method. In this study for the nonlinear postbuckling analysis, it is solved using Crisfield’s arc-length method.
4 Computational strategies
In this section, the computational strategies to utilize the ANCF approach for the nonlinear postbuckling analysis and buckling analysis of framed structures are presented. For the inplane nonlinear postbuckling analysis, the arc-length method is adopted. For the buckling analysis, a dichotomy scheme is utilized.
4.1 Nonlinear postbuckling analysis with arc-length method
In nonlinear FEM, the load–deflection response of arches is studied by using the nonlinear static solvers such as the Newton–Raphson method. In the 1970s, the arc-length method was proposed by Wempner in which the generalized arc-length constraint in the load–deflection space is used to solve the algebraic equations of the discrete system. These equations are derived from the differential equations of the nonlinear continuous system to overcome the limit points in incremental computations [53]. In the 1980s, Riks proposed a numerical method similar to Wempner’s method; however, the nonlinear equilibrium path is obtained using the incremental procedure, which uses the length of the equilibrium path as a control parameter [54]. Crisfield proposed the modified form of Rik’s method, sometimes known as Crisfield’s arc-length method. In this method, the tangential stiffness matrix required to solve the nonlinear algebraic equations of the discretized form of system equations is identical to the one utilized in the full Newton–Raphson iteration method. The equation for the nonlinear static equilibrium is written in the following in the continuation method, usually called as the arc-length method [55]:
where
In the arc-length method implemented in this article, the incremental arc-length parameter
The value of arc-length parameter
4.2 Buckling analysis using energy criterion
Wang and Wang applied the energy criterion to find the relative minimum of the total potential energy of the system in order to find the critical buckling load. They effectively used the nonlinear iterative algorithm based on the dichotomy scheme to find the critical buckling load of the structure using ANCF beam elements.
The energy criteria can be utilized to find the critical buckling load, as we can seek to find the condition where the static equilibrium does not exist by continuously updating the applied load. Hence, all the loading conditions where the change in the total potential energy is positive definite corresponds to the equilibrium position [57]. The total potential energy expressed in the form of Taylor’s series is
Since, at the static equilibrium position, the first derivative remains zero. There will be no change in the initial configuration with respect to the applied load:
Rearranging Eq. (48), putting the value of the first derivative, and ignoring all the higher-order terms in the Taylor series, we can arrive at the following expression:
where the tangential stiffness matrix corresponds to the term in the above expression as follows:
The energy criterion states that the homogenous quadratic form of Eq. (50) remains positive definite for the stable equilibrium to exist. It can occur if and only if the determinant of the tangential stiffness matrix is all positive, which can be expressed as follows:
From the above discussion, it occurs that as the system moves toward instability, the value of the determinant tends to seek zero value. As soon as it becomes zero, the system is no more stable. Hence, the instability condition becomes
While the determinant of the tangential stiffness matrix can be calculated utilizing eigenvalues as follows:
where the determinant is the product of all the eigenvalues of the matrix. Hence, the critical point can be found by carefully monitoring the sign of the eigenvalue of the tangent stiffness matrix by applying the delicate dichotomy scheme, which iterates the solution closer and closer to zero against the varying compressive load. In this way, the first, second, or third buckling loads, along with the buckling mode shapes, can be extracted. Further details and discussion can be found in the study of Wang and Wang [20].
5 Numerical examples
In this section, the nonlinear postbuckling and buckling analysis is conducted for Lee’s frame with different boundary conditions. To find the relevant buckling load, for different boundary condition cases, both buckling estimation methods are employed. And, to check the validity of the ANCF-based approaches being employed, and to verify the codes being used, the convergence for the nonlinear postbuckling limit load for Lee’s frame (as shown in Figure 1) is studied, as shown in Figure 2. Throughout the study, the tolerance criterion and tolerance limit for the convergence to the equilibrium state are considered to be the Euclidean norm of the residual force as follows:

Lee’s frame with pinned–pinned boundary conditions.

Convergence of ANCF elements.
5.1 Case 1: Snap-back of Lee’s frame
Lee’s frame with the length of each arm
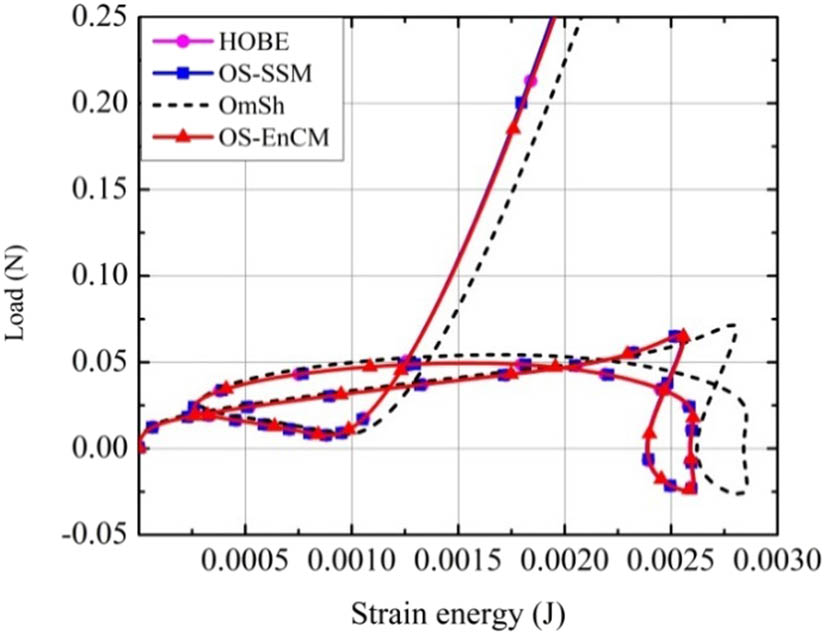
The total number of iterations and the number of load steps utilized to reach the maximum proscribed load when tracing the complete nonlinear equilibrium path for the OmSh, OS-SSM, OS-EnCM, and HOBE are shown in Table 1. The simulated deflection of Lee’s frame can be seen in Figure 3, whereas x-deflection and y-deflection can be seen in Figures 4 and 5, respectively. The variation of strain energy according to the change in applied load is shown in Figure 6. The whole 3D equilibrium path using HOBE can be found in Figure 7. It can be observed that the OmSh slightly overpredicts the limit point postbuckling load as compared to the ANSYS BEAM188 reference solution. The results produced by the OS-SSM, OS-EnCM, and HOBE agree well with the reference solution. The complete snap-back nonlinear postbuckling response of Lee’s frame with pinned–pinned boundary conditions is successfully predicted by ANCF-based approaches. However, it is found that the total number of iterations required to complete the path is minimum for the OmSh and then OS-EnCM. It is slightly higher for the OS-SSM and much higher for the HOBE. It should be further noted that the HOBE required only two iterations per incremental load step to reach the equilibrium state and does not present any convergence-related issues.
Limit point postbuckling load for Lee’s frame with pinned–pinned BCs (Case 1)
| OmSh | OS-SSM | HOBE | OS-EnCM | BEAM188 | |
|---|---|---|---|---|---|
| Limit point | 0.020339 | 0.0185216 | 0.0185252 | 0.0185244 | 0.0185537 |
| No. of elements | 60 | 60 | 60 | 60 | 200 |
| No. of steps | 153 | 153 | 933 | 153 | — |
| No. of iterations | 438 | 738 | 1,866 | 448 | — |
| Complete path | Yes | Yes | Yes | Yes | Yes |

Lee’s frame with pinned–pinned boundary conditions and contour represents von Mises stress (Case 1).

Snap-back of Lee’s frame showing x-deflection (Case 1).

Snap-back of Lee’s frame showing y-deflection (Case 1).

Strain energy of snap-back of Lee’s frame (Case 1).

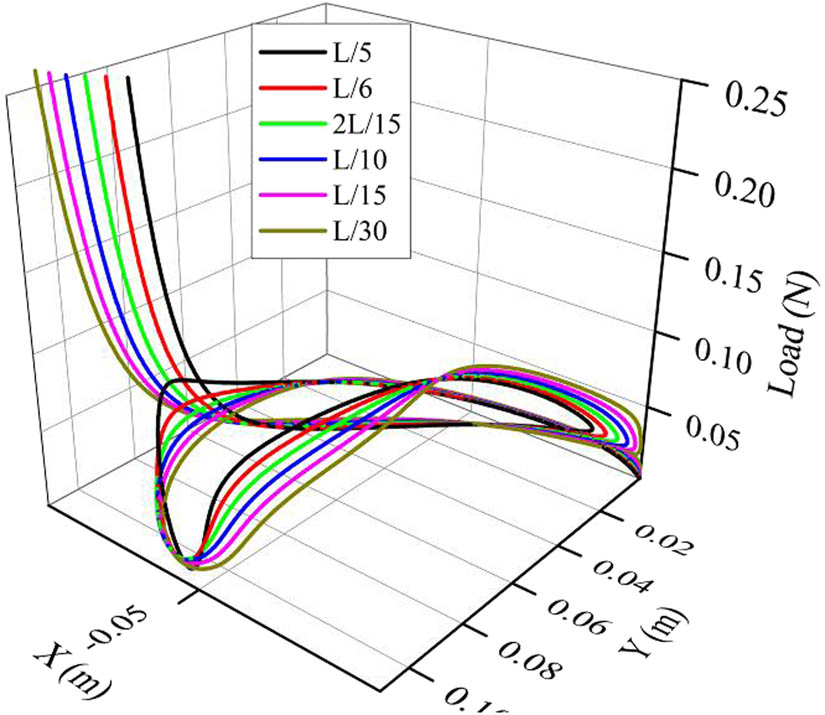
Complete 3D equilibrium path of snap-back of Lee’s frame (Case 1) with varying offset load points.
The buckling analysis based on the energy criterion utilizing the HOBE, OS-EnCM, and OmSh approaches is successfully conducted for Lee’s frame with pinned–pinned boundary conditions. It is found that the OS-SSM failed to converge to the solution. Therefore, it is not included in Table 2. For comparison with the reference solution, 200 ANSYS BEAM188 elements are used to calculate the critical buckling load, and the obtained results are presented in Table 2. It can be seen that the ANCF-based HOBE and OS-EnCM results for the first, second, and third buckling loads are in good agreement with the reference, whereas the OmSh overpredicts the three buckling loads. The three buckling mode shapes simulated using the HOBE are shown in Figure 8.
Critical buckling load for Lee’s frame with pinned–pinned BCs (Case 1)
| First mode | Second mode | Third mode | |
|---|---|---|---|
| ANCF HOBE | 0.01384 | 0.04440 | 0.09504 |
| ANCF OmSh | 0.01538 | 0.04932 | 0.10450 |
| ANCF OS-EnCM | 0.01391 | 0.04434 | 0.09492 |
| ANSYS BEAM188 | 0.01399 | 0.04487 | 0.09456 |

Buckling mode shapes for Lee’s frame with pinned–pinned BCs (Case 1).
It should be noted that the energy criterion-based buckling analysis is done when the load is applied in the vertically downward direction at the rigid joint of Lee’s frame, not offsetting by L/5, as in the nonlinear postbuckling analysis. Because the concept for using the buckling analysis is to model the perfect initial geometry with loading conditions of the structure without any imperfection, i.e., without any introduction of small perturbation load or eccentric displacement in the form of a small offset. On the contrary, for the nonlinear postbuckling analysis, the nonlinear large deformation analysis is done by allowing the imperfection so that the whole nonlinear equilibrium path can be traced and the limit point postbuckling loads can be found. In further investigation, the HOBE approach is utilized while the offset point of the load is varied to find the lowest limit load, but L/5 is found to give the lowest value. Hence, we can see that the 0.0138 N critical buckling load is less than the 0.018 N limit point postbuckling load given by the L/5 offset. Therefore, the critical buckling load obtained by the energy criterion-based buckling analysis should be used as the maximum allowed load.
5.2 Case 2: Snap-through of Lee’s frame
The whole nonlinear equilibrium path in the form of the snap-through response for Lee’s frame with pinned-fixed boundary conditions is traced. The deflected frame after equal intervals can be seen in Figure 9, while the deflection in the x- and y-axis against load can be observed in Figures 10 and 11, respectively. The variation of strain energy according to the change in applied load is shown in Figure 12. The complete 3D equilibrium path using HOBE can be seen in Figure 13. The numerical results are presented in Table 3. It is observed from the data that the OmSh predicts a slightly higher limit load than the reference ANSYS BEAM188 solution due to the presence of the locking. Whereas the other ANCF-based approaches, i.e., OS-SSM, OS-EnCM, and HOBE, have no considerable difference. The number of load steps and the total number of iterations required to complete the path are highest for the HOBE, high for the OS-SSM, while it is least for the OmSh and OS-EnCM. Additionally, it is important to notice that the OmSh, OS-EnCM, and HOBE only require two iterations per incremental load step to converge to the equilibrium state. The OS-SSM, in this case of snap-through buckling of Lee’s frame, sometimes requires a higher number of iterations than two per incremental load step.

Lee’s frame with pinned-fixed boundary conditions where contour represents von Mises stress (Case 2).

Snap-through of Lee’s frame showing x-deflection (Case 2).

Snap-through of Lee’s frame showing y-deflection (Case 2).

Strain energy graph of snap-through of Lee’s frame (hinged-fixed).

Complete 3D equilibrium path of snap-through of Lee’s frame (Case 2) with varying offset load points.
Limit point postbuckling load for Lee’s frame with pinned-fixed BCs (Case 2)
| OmSh | OS-SSM | HOBE | OS-EnCM | BEAM188 | |
|---|---|---|---|---|---|
| First limit point | 0.019931 | 0.018145 | 0.018145 | 0.0181409 | 0.0181195 |
| No. of elements | 60 | 60 | 60 | 60 | 200 |
| No. of steps | 99 | 101 | 686 | 101 | — |
| No. of iterations | 198 | 466 | 1,372 | 202 | — |
| Complete path | Yes | Yes | Yes | Yes | Yes |
Similarly, as in the previous case, for the energy criterion-based buckling analysis OS-SSM failed to converge. But, the ANCF-based HOBE, OS-EnCm, and OmSh approaches converged, and the obtained solutions are shown in Table 4. The mode shapes obtained utilizing the HOBE approach are shown in Figure 14. The HOBE and OS-EnCM results for all three critical buckling loads match well with the ANSYS BEAM188 results, whereas, due to the locking phenomenon present in the OmSh element, the predicted critical load is higher.
Critical buckling load for Lee’s frame with pinned-fixed BCs (Case 2)
| First mode | Second mode | Third mode | |
|---|---|---|---|
| ANCF HOBE | 0.02709 | 0.06375 | 0.12581 |
| ANCF OmSh | 0.02979 | 0.07056 | 0.14070 |
| ANCF OS-EnCM | 0.02679 | 0.06351 | 0.12883 |
| ANSYS BEAM188 | 0.02701 | 0.06397 | 0.12497 |

Buckling mode shapes for Lee’s frame with pinned-fixed BCs (Case 2).
While using the HOBE approach, the offset point of the load is varied in the range of L/5 to L/30, but it was found that the L/5 offset gives the lowest value for the first limit load. After, the energy criterion-based buckling analysis and nonlinear postbuckling analysis results are compared. It is found that the first critical buckling load 0.027 N is higher than the postbuckling limit load 0.018 N, which means that the chance of limit point buckling occurring is higher. Therefore, the limit point postbuckling load should be used as the maximum allowed load.
5.3 Case 3: Lee’s frame with looping phenomenon (fixed–fixed)
The first limit points of the nonlinear equilibrium path of Lee’s frame with fixed–fixed boundary conditions are presented in Table 5. From the comparison of the OmSh, OS-EnCM, OS-SSM, and HOBE results against the ANSYS BEAM188, it can be seen that the OS-SSM failed to complete the whole nonlinear equilibrium path. Lee’s frame deflections are simulated in Figure 15, while the x-deflection and y-deflection can be observed in Figures 16 and 17, respectively. The variation of strain energy according to the change in applied load is shown in Figure 18. The whole nonlinear equilibrium path is shown in Figure 19. The whole nonlinear equilibrium path using HOBE is shown in Figure 16. The HOBE results are produced using the arc-length parameter
Limit point postbuckling load for Lee’s frame with fixed–fixed BCs (Case 3)
| OmSh | OS-SSM | HOBE | OS-EnCM | BEAM188 | |
|---|---|---|---|---|---|
| First limit point | 0.050684 | 0.046235 | 0.046518 | 0.0461388 | 0.047132 |
| No. of elements | 60 | 60 | 60 | 60 | 200 |
| No. of steps | 982 | 515 | 6,242 | 983 | — |
| No. of iterations | 2,068 | 2,603 | 12,484 | 2,084 | — |
| Complete path | Yes | No | Yes | Yes | Yes |

Lee’s frame with fixed–fixed boundary conditions where contour represents von Mises stress (Case 3).

Lee’s frame with looping phenomenon showing x-deflection (Case 3).

Lee’s frame with looping phenomenon showing y-deflection (Case 3).

Strain energy graph of looping phenomenon of Lee’s frame (Case 3).

Complete 3D equilibrium path of looping phenomenon of Lee’s frame (Case 3) with varying offset load points.
During the energy criterion-based buckling analysis, for Lee’s frame with fixed–fixed boundary conditions, the ANCF-based OS-SSM element failed to converge. On the other hand, the ANCF-based OmSh, OS-EnCM, and HOBE give a result that agrees well with the ANSYS BEAM188-produced solution, as shown in Table 6. It can be seen that OmSh overpredicts the critical buckling loads. Hence, the three critical buckling loads and corresponding mode shapes are successfully extracted using HOBE. Three mode shapes obtained using the HOBE approach can be seen in Figure 20. While investigating the various offset load points, using the HOBE approach, it is found that the L/6 offset point gives the lowest first limit point load as 0.03395 N. As the lowest critical buckling load is 0.028 N which is less than the postbuckling limit load of the concern, the critical buckling load based on energy criterion should be used as the maximum allowed load.
Critical buckling load for Lee’s frame with fixed–fixed BCs (Case 3)
| First mode | Second mode | Third mode | |
|---|---|---|---|
| ANCF HOBE | 0.02805 | 0.06575 | 0.12918 |
| ANCF OmSh | 0.03125 | 0.07206 | 0.14158 |
| ANCF OS-EnCM | 0.02820 | 0.06554 | 0.12867 |
| ANSYS BEAM188 | 0.02873 | 0.06576 | 0.12827 |

Buckling mode shapes for Lee’s frame with fixed–fixed BCs (Case 3).
5.4 Case 4: Lee’s frame with looping phenomenon (fixed-pinned)
During the nonlinear postbuckling analysis, the looping behavior of Lee’s frame with fixed-pinned boundary conditions is simulated, and numerical results are presented in Table 7. The deflected Lee’s frame under loading is shown in Figure 21, whereas deflection graphs in the x- and y-axis can be observed in Figures 22 and 23, respectively. The variation of strain energy according to the change in applied load is shown in Figure 24. The complete 3D nonlinear equilibrium path obtained using HOBE is shown in Figure 25. The HOBE results are produced using the arc-length parameter as
Limit point postbuckling load for Lee’s frame with fixed-pinned BCs (Case 4)
| OmSh | OS-SSM | HOBE | OS-EnCM | BEAM188 | |
|---|---|---|---|---|---|
| First limit point | 0.071547 | 0.065528 | 0.065856 | 0.065265 | 0.065366 |
| No. of elements | 60 | 60 | 60 | 60 | 200 |
| No. of steps | 662 | 1,327 | 3,037 | 663 | — |
| No. of iterations | 1,324 | 3,766 | 6,074 | 1,326 | — |
| Complete path | Yes | Yes | Yes | Yes | Yes |

Lee’s frame with fixed-pinned boundary conditions where contour represents von Mises stress (Case 4).

Lee’s frame with looping phenomenon showing x-deflection (Case 4).

Lee’s frame with looping phenomenon showing y-deflection (Case 4).
Strain energy graph of looping phenomenon of Lee’s frame (Case 4).
Complete 3D equilibrium path of looping phenomenon of Lee’s frame (Case 4) with varying offset load points.
In this case, the energy criterion-based buckling analysis for the OS-SSM element failed to converge. But, the ANCF-based HOBE, OS-EnCM, and OmSh approaches converged to the solution which is shown in Table 8. The result produced by the HOBE and OS-EnCM are found to be in good agreement with the ANSYS BEAM188 result for the three critical buckling loads. The three mode shapes using the HOBE approach are shown in Figure 26. Upon varying the offset load points and tracing the whole equilibrium path using the HOBE approach, it is found that the L/15 gives the lowest first limit load value as 0.04015 N. It is observed that the postbuckling limit load of concern is many times higher than the lowest critical buckling load of 0.014 N. Therefore, the maximum allowed load should not exceed the critical buckling load obtained by the energy criterion.
Critical buckling load for Lee’s frame with fixed-pinned BCs (Case 4)
| First mode | Second mode | Third mode | |
|---|---|---|---|
| ANCF HOBE | 0.01459 | 0.04626 | 0.09545 |
| ANCF OmSh | 0.01624 | 0.0509 | 0.1062 |
| ANCF OS-EnCM | 0.01460 | 0.04539 | 0.09664 |
| ANSYS BEAM188 | 0.01490 | 0.04662 | 0.09705 |

Buckling mode shapes for Lee’s frame with fixed-pinned BCs (Case 4).
5.5 Case 5: Roorda’s frame
As it can be seen from the previous numerical problems, the ANCF-based HOBE approach is the best approach among the studied ANCF approaches for the nonlinear frame analysis. For further verification and validation, comparison with the experimental result is a must. Hence, the L-frame from Roorda’s experiment is studied here.
Koiter, in his landmark thesis, applied the perturbation-based numerical technique to estimate the buckling load of the L-frame, which is given by the formula

Postbuckling solution for the Roorda’s frame.

Comparison between ANCF based HOBE, Roorda’s experiment, Koiter’s perturbation technique, Rizzi’s analytical solution and Galvão’s nonlinear solution.
Rizzi et al. conducted a thorough parametric analysis of the two-bar frame problem by using the modified potential energy approach. This analysis was profound yet simple, allowing us to incorporate the fourth-order terms in the analytical solution. But, from Figures 27 and 28, when the analytical results of Rizzi, Roorda’s experimental, and Koiter’s perturbation approach are compared, it can be seen that Galvão’s nonlinear solution and ANCF HOBE solution are much better.
6 Conclusion
This article verifies the capability of the ANCF beam element for the nonlinear postbuckling and buckling analysis of Lee’s frame benchmark example. The GCM-based ANCF beam elements and the modified one using two locking alleviation methods are tested and compared. Four different boundary conditions, i.e., pinned–pinned, fixed-pinned, pinned-fixed, and fixed–fixed, are studied. The nonlinear postbuckling behavior is traced in the form of snap-back, snap-through, and looping phenomenon while the corresponding limit point postbuckling loads are recorded. The energy criterion is applied by tracing the eigenvalues via the dichotomy scheme to find the critical buckling loads and extract the corresponding buckling mode shapes. All the obtained results are compared and discussed. The following conclusions can be reached:
The higher-order ANCF beam element based on the GCM approach (HOBE) is found to be accurate and stable among the approaches being investigated. It is also the consistent one, as it successfully converges to the solution without presenting any convergence-related issues for both types of buckling analysis. Additionally, for the nonlinear postbuckling analysis of the cases being investigated, HOBE needs only two iterations per incremental load step for convergence.
The standard ANCF beam element modified by the enhanced continuum mechanics method, i.e., OS-EnCM, can predict the limit point postbuckling and critical buckling loads. But, during the two cases, the arc-length parameter needed to be adjusted and lowered to help the OS-EnCM approach to converge to the equilibrium path and trace the whole equilibrium path.
The standard ANCF beam element modified by the split strain method, i.e., OS-SSM, during the nonlinear postbuckling analysis, can alleviate locking but is not able to trace the whole nonlinear equilibrium path for the fixed–fixed boundary condition case, which exhibits looping phenomenon. For the energy criterion-based buckling analysis of all Lee’s frame cases being investigated, this approach does not converge to the solution.
The standard ANCF beam element based on the GCM approach, i.e., OmSh, slightly overpredicts the limit load in the nonlinear postbuckling analysis due to the locking phenomenon but successfully traces the complete equilibrium path. For the energy criterion-based buckling analysis, this approach also slightly overpredicts the critical buckling load in all the boundary conditions being investigated.
Hence, it is concluded that the HOBE approach can be used for the general in-plane nonlinear postbuckling analysis and energy criterion-based buckling analysis of the frame structures with different boundary conditions. Whereas the OS-EnCM approach may reduce locking but should need attention while performing analysis. On the contrary, the OS-SSM approach may present some convergence-related issues, and the OmSh approach may slightly overpredict the buckling loads. Hence, the latter three approaches should be used with care.
Nomenclature
-
-
vector of element nodal coordinates
-
-
nodal vector in the reference configuration
-
-
longitudinal coordinate defined in the local coordinate system
-
-
transverse coordinate defined in the local coordinate system
-
-
length of the element
-
-
dimensionless longitudinal coordinate
-
-
dimensionless transverse coordinate
-
-
global position vector of an arbitrary point between the nodes
-
-
absolute position vector of the centerline of the element
-
-
slope of the absolute position vector defined as
-
-
shape function in the shape function matrix
-
-
shape function matrix
-
-
matrix of elastic coefficient
-
-
matrix of material constants belongs to centerline terms
-
-
matrix of material constants belongs to higher-order terms
-
-
identity matrix of order two
-
-
Jacobian matrix corresponding to a curved configuration
-
-
Jacobian matrix corresponding to a deformed configuration
-
-
Jacobian matrix of deformed configuration with respect to the curved configuration
-
-
Jacobian matrix related to the centerline of the beam
-
-
Jacobian matrix related to higher-order terms
-
-
Voigt strain
-
-
axial strain
-
-
transverse strain
-
-
shear strain
-
-
Green–Lagrange strain tensor
-
-
component of the Green–Lagrange strain tensor belongs to the centerline
-
-
component of the Green–Lagrange strain tensor belongs to higher-order terms
-
-
Voigt strain vector belonging to the centerline
-
-
Voigt strain vector belonging to higher-order terms
-
-
Voigt stress vector
-
-
shear correction factor
-
-
Lame’s parameters
-
-
shear modulus
-
-
modified matrix of elastic coefficient without Poisson’s ratio
-
-
matrix of elastic coefficient with Poisson’s ratio
-
-
transformation matrix
-
-
internal elastic force vector
-
-
constant directional vector for an external force
-
-
variable scalar loading parameter for an external force
-
-
external force
-
-
arc-length constant for load estimation
-
-
incremental displacement vector
-
-
strain energy
-
-
tangent stiffness matrix
-
-
error estimate
-
-
upper load limit
-
-
cross-section width of the frame
-
-
cross-section height of the frame
-
-
length of the one arm of the frame
-
-
Young’s modulus
-
-
Poisson’s ratio
Acknowledgments
The authors gratefully acknowledge the Harbin Institute of Technology and China Scholarship Council (CSC) for providing an adequate environment for this research.
-
Funding information: This research was supported by the “Independent Research and Development project of State Key Laboratory of Green Building in Western China” (LSZZ202209).
-
Author contributions: All authors have accepted responsibility for the entire content of this manuscript and approved its submission.
-
Conflict of interest: Authors state no conflict of interest.
References
[1] Shabana AA. Definition of the slopes and the finite element absolute nodal coordinate formulation. Multibody Syst Dyn. 1997;1(3):339–48.10.1023/A:1009740800463Search in Google Scholar
[2] Shabana AA. Definition of ANCF finite elements. J Comput Nonlinear Dyn. 2015;10(5):054506(1–5).10.1115/1.4030369Search in Google Scholar
[3] Shabana AA. Computational continuum mechanics. 3rd ed. Hoboken (NJ), USA: John Wiley & Sons Ltd; 2018. p. 363.10.1002/9781119293248Search in Google Scholar
[4] Shabana AA. ANCF tire assembly model for multibody system applications. J Comput Nonlinear Dyn. 2015;10(2):024504(1–4).10.1115/1.4028479Search in Google Scholar
[5] Yu Z, Liu Y, Tinsley B, Shabana AA. Integration of geometry and analysis for vehicle system applications: Continuum-based leaf spring and tire assembly. J Comput Nonlinear Dyn. 2016;11(3):031011(1–11).10.1115/1.4031151Search in Google Scholar
[6] Wang T, Tinsley B, Patel MD, Shabana AA. Nonlinear dynamic analysis of parabolic leaf springs using ANCF geometry and data acquisition. Nonlinear Dyn. 2018;93:2487–515. 10.1007/s11071-018-4338-3.Search in Google Scholar
[7] Cui Y, Lan P, Zhou H, Yu Z. The rigid-flexible-thermal coupled analysis for spacecraft carrying large-aperture paraboloid antenna. J Comput Nonlinear Dyn. 2020;15(3):031003(1–13).10.1115/1.4045890Search in Google Scholar
[8] Liu C, Tian Q, Yan D, Hu H. Dynamic analysis of membrane systems undergoing overall motions, large deformations and wrinkles via thin shell elements of ANCF. Comput Methods Appl Mech Eng. 2013;258:81–95. 10.1016/j.cma.2013.02.006.Search in Google Scholar
[9] Li K, Tian Q, Shi J, Liu D. Assembly dynamics of a large space modular satellite antenna. Mech Mach Theory. 2019;142(103601):1–18.10.1016/j.mechmachtheory.2019.103601Search in Google Scholar
[10] Shabana AA, Eldeeb AE. Motion and shape control of soft robots and materials. Nonlinear Dyn. 2021;104:165–89. 10.1007/s11071-021-06272-y.Search in Google Scholar
[11] Huang X, Zou J, Gu G. Kinematic modeling and control of variable curvature soft continuum robots. IEEE/ASME Trans. Mechatronics. 2021;26:1–11.10.1109/TMECH.2021.3055339Search in Google Scholar
[12] Hu H, Tian Q, Liu C. Computational dynamics of soft machines. Acta Mech Sin. 2017;33:516–28.10.1007/s10409-017-0660-0Search in Google Scholar
[13] Yoo W-S, Dmitrochenko O, Pogorelov DY. Review of finite elements using absolute nodal coordinates for large-deformation problems and matching physical experiments. ASME 2005 International design Engineering Technical Conferences and Computers and Information in Engineering Conference. 2005 Sep 24–28; Long Beach (CA), USA. ASME, 2005.10.1115/DETC2005-84720Search in Google Scholar
[14] Gerstmayr J, Hiroyuki S, Aki M. Review on the absolute nodal coordinate formulation for large deformation analysis of multibody systems. J Comput Nonlinear Dyn. 2013;8(3):031016(1–12).10.1115/1.4023487Search in Google Scholar
[15] Dmitrochenko O, Mikkola A. Digital nomenclature code for topology and kinematics of finite elements based on the absolute nodal co-ordinate formulation. Proc Inst Mech Eng Part K J Multi-body Dyn. 2011;225(1):34–51.10.1177/2041306810392115Search in Google Scholar
[16] Luo K, Liu C, Tian Q, Hu H. Nonlinear static and dynamic analysis of hyper-elastic thin shells via the absolute nodal coordinate formulation. Nonlinear Dyn. 2016;85:949–71.10.1007/s11071-016-2735-zSearch in Google Scholar
[17] Li J, Liu C, Hu H, Zhang S. Analysis of elasto-plastic thin-shell structures using layered plastic modeling and absolute nodal coordinate formulation. Nonlinear Dyn. 2021;105:2899–920.10.1007/s11071-021-06766-9Search in Google Scholar
[18] Nachbagauer K, Gerstmayr J. Structural and continuum mechanics approaches for a 3D shear deformable ANCF beam finite element: Application to buckling and nonlinear dynamic examples. J Comput Nonlinear Dyn. 2013;9(1):1–8. 10.1115/1.4025282.Search in Google Scholar
[19] Shaukat AR, Lan P, Wang J, Wang T. In-plane nonlinear postbuckling analysis of circular arches using absolute nodal coordinate formulation with arc-length method. Proc Inst Mech Eng Part K J Multi-body Dyn. 2021 Sep;235(3):297–311.10.1177/1464419320971412Search in Google Scholar
[20] Wang J, Wang T. Buckling analysis of beam structure with absolute nodal coordinate formulation. Proc Inst Mech Eng Part C J Mech Eng Sci. 2021 May;235(9):1585–92.10.1177/0954406220947117Search in Google Scholar
[21] Reis PM. A perspective on the revival of structural (In)stability with novel opportunities for function: From Buckliphobia to Buckliphilia. J Appl Mech. 2016;82(11):1–4.10.1115/1.4031456Search in Google Scholar
[22] Cox BS, Groh RMJ, Avitabile D, Pirrera A. Exploring the design space of nonlinear shallow arches with generalised path-following. Finite Elem Anal Des. 2018;143:1–10.10.1016/j.finel.2018.01.004Search in Google Scholar
[23] Hunt G, Champneys A, Dodwell T, Groh R, Neville R, Pirrera A, et al. Happy Catastrophe: recent progress in analysis and exploitation of elastic instability. Front Appl Math Stat. 2019;5:34.10.3389/fams.2019.00034Search in Google Scholar
[24] Pal A, Restrepo V, Goswami D, Martinez RV. Exploiting mechanical instabilities in soft robotics: Control, sensing, and actuation. Adv Mater. 2021;33(19):1–18.10.1002/adma.202006939Search in Google Scholar PubMed
[25] Shabana AA, Gantoi FM, Brown MA. Integration of finite element and multibody system algorithms for the analysis of human body motion. Procedia IUTAM. 2011;2:233–40.10.1016/j.piutam.2011.04.022Search in Google Scholar
[26] Orzechowski G, Fraczek J. Nearly incompressible nonlinear material models in the large deformation analysis of beams using ANCF. Nonlinear Dyn. 2015;82:451–64.10.1007/s11071-015-2167-1Search in Google Scholar
[27] Maqueda LG, Mohamed AA, Shabana AA. Use of General Nonlinear Material Models in Beam Problems: Application to Belts. J Comput Nonlinear Dyn. 2010;5:021003.10.1115/1.4000795Search in Google Scholar
[28] Pil Jung S, Won Park T, Sun Chung W. Dynamic analysis of rubber-like material using absolute nodal coordinate formulation based on the non-linear constitutive law. Nonlinear Dyn. 2011;63:149–57.10.1007/s11071-010-9792-5Search in Google Scholar
[29] Karl-Eugen K. The history of the theory of structures – from arch analysis to computational mechanics. Berlin, Germany: Ernst & Sohn Verlag; 2008.Search in Google Scholar
[30] Timoshenko SP, Gere JM. Theory of elastic stability. 17th ed. London, UK: McGraw; 1963. p. 541Search in Google Scholar
[31] Koiter WT. Post-Buckling Analysis of a Simple Two-Bar Frame. Almquist and Wiksell Stockholm, Sweden: 1967. p. 337–54.Search in Google Scholar
[32] Roorda J, Chilver AH. Frame buckling: An illustration of the perturbation technique. Int J Non Linear Mech. 1970;5(2):235–46.10.1016/0020-7462(70)90021-1Search in Google Scholar
[33] Lee S-L, Manuel FS, Rossow EC. Large deflections and stability of elastic frame. J Eng Mech Div. 1968;94(2):521–48.10.1061/JMCEA3.0000966Search in Google Scholar
[34] Akkoush EA, Toridis TG, Khozeimeh K, Huang HK. Bifurcation, pre- and post-buckling analysis of frame structures. Comput Struct. 1978;8(6):667–78.10.1016/0045-7949(78)90143-8Search in Google Scholar
[35] Simitses GJ, Giri J, Kounadis ANE. Nonlinear analysis of portal frames. Int J Numer Methods Eng. 1981;17:123–32.10.1002/nme.1620170110Search in Google Scholar
[36] Simitses GJ, Giri J. Asymmetrically loaded portal frames. Comput Struct. 1984;19(4):555–8.10.1016/0045-7949(84)90102-0Search in Google Scholar
[37] Kounadis AN, Giri J, Simitses GJ. Nonlinear stability analysis of an eccentrically loaded two-bar frame. J Appl Mech Trans ASME. 1977;44(4):701–6.10.1115/1.3424160Search in Google Scholar
[38] Pignataro M, Rizzi N. The effect of multiple buckling modes on the postbuckling behavior of plane elastic frames. Part I. Symmetric Frames. J Struct Mech. 1982;10(4):437–58.10.1080/03601218208907423Search in Google Scholar
[39] Rizzi N, Pignataro M. The effect of multiple buckling modes on the postbuckling behavior of plane elastic frames. Part II. Symmetric frames. J Struct Mech. 1982;10(4):459–74.10.1080/03601218208907424Search in Google Scholar
[40] Pignataro M, Rizzi N. On the interaction between local and overall buckling of an asymmetric portal frame. Meccanica. 1983;18(2):92–6.10.1007/BF02128349Search in Google Scholar
[41] Pacoste C, Eriksson A. Beam elements in instability problems. Comput Methods Appl Mech Eng. 1997;144(1–2):163–97.10.1016/S0045-7825(96)01165-6Search in Google Scholar
[42] Waszczyszyn Z, Janus-Michalska M. Numerical approach to the “exact” finite element analysis of in-plane finite displacements of framed structures. Comput Struct. 1998;69(4):525–35.10.1016/S0045-7949(98)00115-1Search in Google Scholar
[43] Galvão AS, Gonçalves PB, Silveira RAM. Post-buckling behavior and imperfection sensitivity of L-frames. Int J Struct Stab Dyn. 2005;5(1):19–35.10.1142/S021945540500143XSearch in Google Scholar
[44] Basaglia C, Camotim D, Silvestre N. Post-buckling analysis of thin-walled steel frames using generalised beam theory (GBT). Thin-Walled Struct. 2013;62:229–42. 10.1016/j.tws.2012.07.003.Search in Google Scholar
[45] Yeong-Bin Y, Shyh-Rong K. Theory and analysis of nonlinear framed structures. 1st ed. Upper Saddle River (NJ), USA: Prentice Hall; 1994. p. 569.Search in Google Scholar
[46] Yeong-Bin Y, Anquan C, Song H. Research on nonlinear, postbuckling and elasto-plastic analyses of framed structures and curved beams. Meccanica. 2020;56:1587–612. 10.1007/s11012-020-01182-6.Search in Google Scholar
[47] Omar MA, Shabana AA. A two-dimensional shear deformable beam for large rotation and deformation problems. J Sound Vib. 2001;243(3):565–76.10.1006/jsvi.2000.3416Search in Google Scholar
[48] Patel M, Shabana AA. Locking alleviation in the large displacement analysis of beam elements: the strain split method. Acta Mech. 2018;229:2923–46.10.1007/s00707-018-2131-5Search in Google Scholar
[49] Gerstmayr J, Matikainen MK, Mikkola AM. A geometrically exact beam element based on the absolute nodal coordinate formulation. Multibody Syst Dyn. 2008;20(4):359–84.10.1007/s11044-008-9125-3Search in Google Scholar
[50] Shen Z, Li P, Liu C, Hu G. A finite element beam model including cross-section distortion in the absolute nodal coordinate formulation. Nonlinear Dyn. 2014;77:1019–33.10.1007/s11071-014-1360-ySearch in Google Scholar
[51] Orzechowski G, Shabana AA. Analysis of warping deformation modes using higher order ANCF beam element. J Sound Vib. 2016;363:428–45.10.1016/j.jsv.2015.10.013Search in Google Scholar
[52] Shabana AA, Mikkola AM. Use of the finite element absolute nodal coordinate formulation in modeling slope discontinuity. J Mech Des Trans ASME. 2003;125(2):342–50.10.1115/1.1564569Search in Google Scholar
[53] Wempner GA. Discrete approximations related to nonlinear theories of solids. Int J Solids Struct. 1971;7(11):1581–99.10.1016/0020-7683(71)90038-2Search in Google Scholar
[54] Riks E. An incremental approach to the solution of snapping and buckling problems. Int J Solids Struct. 1978;15(7):529–51.10.1016/0020-7683(79)90081-7Search in Google Scholar
[55] Crisfield MA. A fast incremental/iterative solution procedure that handles “Snap-through”. Comput Struct. 1981;13(1–3):55–62.10.1016/0045-7949(81)90108-5Search in Google Scholar
[56] de Borst R, Crisfield MA, Remmers JJC, Verhoosel CV. Non-linear finite element analysis of solids and structures. Chichester, UK: John Wiley & Sons; 2012.10.1002/9781118375938Search in Google Scholar
[57] Simitses G, Hodges DH. Fundamentals of structural stability. 1st ed. Oxford, UK: Butterworth-Heinemann; 2006.Search in Google Scholar
© 2023 the author(s), published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Research Articles
- Investigation of differential shrinkage stresses in a revolution shell structure due to the evolving parameters of concrete
- Multiphysics analysis for fluid–structure interaction of blood biological flow inside three-dimensional artery
- MD-based study on the deformation process of engineered Ni–Al core–shell nanowires: Toward an understanding underlying deformation mechanisms
- Experimental measurement and numerical predictions of thickness variation and transverse stresses in a concrete ring
- Studying the effect of embedded length strength of concrete and diameter of anchor on shear performance between old and new concrete
- Evaluation of static responses for layered composite arches
- Nonlocal state-space strain gradient wave propagation of magneto thermo piezoelectric functionally graded nanobeam
- Numerical study of the FRP-concrete bond behavior under thermal variations
- Parametric study of retrofitted reinforced concrete columns with steel cages and predicting load distribution and compressive stress in columns using machine learning algorithms
- Application of soft computing in estimating primary crack spacing of reinforced concrete structures
- Identification of crack location in metallic biomaterial cantilever beam subjected to moving load base on central difference approximation
- Numerical investigations of two vibrating cylinders in uniform flow using overset mesh
- Performance analysis on the structure of the bracket mounting for hybrid converter kit: Finite-element approach
- A new finite-element procedure for vibration analysis of FGP sandwich plates resting on Kerr foundation
- Strength analysis of marine biaxial warp-knitted glass fabrics as composite laminations for ship material
- Analysis of a thick cylindrical FGM pressure vessel with variable parameters using thermoelasticity
- Structural function analysis of shear walls in sustainable assembled buildings under finite element model
- In-plane nonlinear postbuckling and buckling analysis of Lee’s frame using absolute nodal coordinate formulation
- Optimization of structural parameters and numerical simulation of stress field of composite crucible based on the indirect coupling method
- Numerical study on crushing damage and energy absorption of multi-cell glass fibre-reinforced composite panel: Application to the crash absorber design of tsunami lifeboat
- Stripped and layered fabrication of minimal surface tectonics using parametric algorithms
- A methodological approach for detecting multiple faults in wind turbine blades based on vibration signals and machine learning
- Influence of the selection of different construction materials on the stress–strain state of the track
- A coupled hygro-elastic 3D model for steady-state analysis of functionally graded plates and shells
- Comparative study of shell element formulations as NLFE parameters to forecast structural crashworthiness
- A size-dependent 3D solution of functionally graded shallow nanoshells
- Special Issue: The 2nd Thematic Symposium - Integrity of Mechanical Structure and Material - Part I
- Correlation between lamina directions and the mechanical characteristics of laminated bamboo composite for ship structure
- Reliability-based assessment of ship hull girder ultimate strength
- Finite element method on topology optimization applied to laminate composite of fuselage structure
- Dynamic response of high-speed craft bottom panels subjected to slamming loadings
- Effect of pitting corrosion position to the strength of ship bottom plate in grounding incident
- Antiballistic material, testing, and procedures of curved-layered objects: A systematic review and current milestone
- Thin-walled cylindrical shells in engineering designs and critical infrastructures: A systematic review based on the loading response
- Laminar Rayleigh–Benard convection in a closed square field with meshless radial basis function method
- Determination of cryogenic temperature loads for finite-element model of LNG bunkering ship under LNG release accident
- Roundness and slenderness effects on the dynamic characteristics of spar-type floating offshore wind turbine
Articles in the same Issue
- Research Articles
- Investigation of differential shrinkage stresses in a revolution shell structure due to the evolving parameters of concrete
- Multiphysics analysis for fluid–structure interaction of blood biological flow inside three-dimensional artery
- MD-based study on the deformation process of engineered Ni–Al core–shell nanowires: Toward an understanding underlying deformation mechanisms
- Experimental measurement and numerical predictions of thickness variation and transverse stresses in a concrete ring
- Studying the effect of embedded length strength of concrete and diameter of anchor on shear performance between old and new concrete
- Evaluation of static responses for layered composite arches
- Nonlocal state-space strain gradient wave propagation of magneto thermo piezoelectric functionally graded nanobeam
- Numerical study of the FRP-concrete bond behavior under thermal variations
- Parametric study of retrofitted reinforced concrete columns with steel cages and predicting load distribution and compressive stress in columns using machine learning algorithms
- Application of soft computing in estimating primary crack spacing of reinforced concrete structures
- Identification of crack location in metallic biomaterial cantilever beam subjected to moving load base on central difference approximation
- Numerical investigations of two vibrating cylinders in uniform flow using overset mesh
- Performance analysis on the structure of the bracket mounting for hybrid converter kit: Finite-element approach
- A new finite-element procedure for vibration analysis of FGP sandwich plates resting on Kerr foundation
- Strength analysis of marine biaxial warp-knitted glass fabrics as composite laminations for ship material
- Analysis of a thick cylindrical FGM pressure vessel with variable parameters using thermoelasticity
- Structural function analysis of shear walls in sustainable assembled buildings under finite element model
- In-plane nonlinear postbuckling and buckling analysis of Lee’s frame using absolute nodal coordinate formulation
- Optimization of structural parameters and numerical simulation of stress field of composite crucible based on the indirect coupling method
- Numerical study on crushing damage and energy absorption of multi-cell glass fibre-reinforced composite panel: Application to the crash absorber design of tsunami lifeboat
- Stripped and layered fabrication of minimal surface tectonics using parametric algorithms
- A methodological approach for detecting multiple faults in wind turbine blades based on vibration signals and machine learning
- Influence of the selection of different construction materials on the stress–strain state of the track
- A coupled hygro-elastic 3D model for steady-state analysis of functionally graded plates and shells
- Comparative study of shell element formulations as NLFE parameters to forecast structural crashworthiness
- A size-dependent 3D solution of functionally graded shallow nanoshells
- Special Issue: The 2nd Thematic Symposium - Integrity of Mechanical Structure and Material - Part I
- Correlation between lamina directions and the mechanical characteristics of laminated bamboo composite for ship structure
- Reliability-based assessment of ship hull girder ultimate strength
- Finite element method on topology optimization applied to laminate composite of fuselage structure
- Dynamic response of high-speed craft bottom panels subjected to slamming loadings
- Effect of pitting corrosion position to the strength of ship bottom plate in grounding incident
- Antiballistic material, testing, and procedures of curved-layered objects: A systematic review and current milestone
- Thin-walled cylindrical shells in engineering designs and critical infrastructures: A systematic review based on the loading response
- Laminar Rayleigh–Benard convection in a closed square field with meshless radial basis function method
- Determination of cryogenic temperature loads for finite-element model of LNG bunkering ship under LNG release accident
- Roundness and slenderness effects on the dynamic characteristics of spar-type floating offshore wind turbine