
Quantum motion control for packaging machines
-
Roberto P. L. Caporali



Abstract
In the present work, we give a description of a quantum motion controller to be used in automatic machines for an automated process, especially in packaging machines. The entanglement properties of the quantum systems are applied to have a perfect synchronization among the N slave axes. A detailed description of an architecture for a quantum motion controller is given. A quantum correction unit, included in the quantum motion control device and based on quantum inference, is also defined and described. The paper describes the characteristics of the robust control in the quantum correction unit. A comparison with traditional motion controllers is established showing the improved performances relative to the jitter compensation.
1 Introduction
Motion control is a subfield of automation including the systems or subsystems involved in the control of moving parts of automatic machines.
The main components typically include a motion controller, an energy amplifier, and one or more prime movers or actuators. Motion control may be either in open-loop or in closed-loop. We focalize our attention only on closed-loop systems, where the measurement of the considered physical dimension (position, velocity, etc.) is converted to a signal that is sent back to the controller, and the controller compensates for any error.
The position or velocity of the automatic machine is controlled using some kind of devices such as hydraulic pumps, linear actuators, or electric motors, generally inverters or servo-drives. Typical examples of inverters control in automation can be seen either in the recent European patent application (2015) by Caporali [1] and in the very recent paper ‘Iterative Method for controlling with a command profile the Sway of a Payload for Gantry and Overhead Traveling Cranes’ (2018) by Caporali [2].
Motion control is widely used in the packaging, printing, textile, semiconductor production, and assembly industries. It includes every technology related to the control of the movement of objects. The focus of motion control is the special control technology of motion systems with electric actuators such as dc/ac servo-motors. Control of robotic manipulators is also included in the field of motion control because most of the robotic manipulators are driven by electrical servo-motors and the key objective is the control of motion.
For the motion control of the automatic machines with high performance (performances measured in terms of product-number/minute and in terms of cycle time of the motion task in the motion controller system), it is essential to obtain the best possible coordination of the machine “axes”. With the term “axis”, we mean the ensemble of the mechanical, electrical, and electronic elements responsible for controlling and implementing a well-defined movement of an independent part of an automatic machine. The best possible coordination of the machine “axes” is necessary for obtaining the higher precision in the movement of the mechanical parts and therefore the higher precision in the products obtained with these processes. As examples of processes, we can consider the production of packages for food like biscuits, ice-creams, snacks, or similar.
A significant number of works have been produced in recent years regarding motion controls with high performances. In particular, we report the following significant studies: [3–12].
Remarkable patents relative to the used motion controllers for packaging machines are the European patent application (2004) by Fertig [13] and the recent U.S. patent application (2017) by Konze et al. [14]. A recent and remarkable work on motion control for packaging machines was obtained by Biagiotti et al. [15]. Two critical features (between them connected) of motion control are surely the motion bus and the position control of the axes.
The motion bus is very critical when coordinated motion between different axes is required because it must provide a very precise synchronization. Historically the first open interface was an analog signal. After that, open interfaces were developed that satisfied the requirements of coordinated motion control, the first being SERCOS which is now enhanced to SERCOS III. Later interfaces capable of carrying out a motion control include Ethernet/IP, Profinet, Ethernet Powerlink, and EtherCAT.
The best actual configuration for motion control using a motion bus is the one with a single master. In this case, the activity of the slaves is coordinated by the master according to the movements required for the realization of the production process.
In practice, the slaves consist of the drives (and the corresponding motors) that receive the commands and the target positions provided by the master, which must have a suitable hardware/software configuration to support the motion bus.
The motion bus is said a “synchronous” bus that is so-called because all the activities on that bus are synchronized through a clock. These activities are defined as isochronous real-time (IRT) and used for motion control applications with high performance in production automation, especially in the packaging sector. Using IRT, the cycle time reaches up to 250 micros with a jitter not exceeding 1 microsec.
The communication cycle in the motion bus is divided into a deterministic part, necessary to send the target positions to the axes in a synchronized manner and to receive the actual positions in an equally synchronous manner from the axes themselves, and in an open nondeterministic part, necessary to exchange the commands and receive various signals. As far as the deterministic part is concerned, it is therefore essential that there is a synchronism as exact as possible between the communications that the master makes with the N slave axes. Today, even a 1 micros jitter can generate accumulative errors in the final element of the kinematic chain, which is the prime mover.
A second critical feature of the motion control, directly connected with the information transmitted with the motion bus, is the realization of the position control. Position control is a fundamental part of a motion control system. It has the task of defining the target position of the electric drive in such a way that the position trajectory achieved by the motion profile generator is executed with a minimum error.
In the present work, a quantum system is defined for obtaining a considerable improvement as regards a traditional motion controller. Two goals are achieved. The first goal is obtaining a very high synchronization between the signals in the motion bus, taking advantage of the entangled property of the transmitted signals. The second goal is realizing the correction unit for the position control with a quantum correction system.
The first methods and systems for quantum computers were realized already in the ‘90s. Particularly, the International Patent (2001) by Ulyanov et al. [16] described a method and hardware architecture for processing data based on quantum soft computing. The method of the invention was characterized in that the correction signal was calculated by a quantum genetic search algorithm. This method established a system for realizing hardware control with a quantum algorithm.
A method and a system for realizing a quantum motion control to use in industrial applications are described. Entering in-depth, we describe a system where the data are exchanged between the controller master and the different slave drives taking advantage of the quantum system properties. We use the entanglement property of the quantum systems in order to have a perfect synchronization among the N target positions sent, in the same instant t, to the N slave drives and the same perfect synchronization among the N actual positions received, subsequently, from the N slave drives.
The entanglement is a property without a classical analog, for which under certain conditions the quantum state of a physical system cannot be described individually, but only as a superposition of several systems. From this characteristic, it follows that the measure of an observable of a system determines instantaneously (more precisely simultaneously, because the instant regards the time, which is absent in quantum physics) the value also for the other systems. Since it is possible from the experimental point of view that systems such as those above described are spatially separated, entanglement implies in a counter-intuitive way the presence of distance correlations (theoretically without any limit) between the physical quantities, determining the nonlocal character of the theory.
To date, various patents and works have developed, in different ways, a method and apparatus for producing quantum entanglement photons. The U.S. Patent Application (2010) by Kanter et al. [17] described a method and system for producing a quantum-entangled signal. The apparatus made use of a nonlinear optical fiber to generate the entangled photons. More polarized output signals can be generated both the signal and idler wavelengths using an alignment source.
The U.S. patent application (2012) by Edamatsu et al. [18] described a method and system for producing quantum entanglement using a quantum-entangled photon pair generator. This generator included a single crystal in which periodically poled structures having different periods are formed. A light radiating unit was used for entering light into the quantum-entangled photon pair generator, such that the light passes through the periodically poled structure.
The European Patent Application by Senellart et al. [19] described a method and system for producing an entangled photon pair. That was obtained using a source comprising a quantum emitter that has a ground state, two degenerate states that have one elementary excitation and different spins, and a state having two elementary excitations. Last but not least, in the U.S. patent application by Arahira [20] was described a method and device for generating quantum-entangled photon pairs. In the described system, the excitation light was split into two components with mutually orthogonal polarization. One component is fed clockwise and the other component was fed counterclockwise into a polarization-maintaining loop.
The present state of the art makes this new method possible. In fact, in the letter published on Nature Photonics by Qi-Chao et al. [21], Quantum teleportation faithfully transfers a quantum state between distant nodes in a network. They reported the construction of a 30 km optical-fiber-based quantum network distributed over a 12.5 km area. This network is robust against noise in the real world with active stabilization strategies, which allows realizing quantum teleportation over this network.
Moreover, the letter published on Nature Photonics by Valivarthi et al. [22], practically at the same time as the previously cited letter. Using the Calgary fiber network, they reported quantum teleportation from a telecom photon at 1532 nm wavelength, interacting with another telecom photon (after both have traveled several kilometers) onto a photon at 795 nm wavelength. Their demonstration establishes an important requirement for quantum repeater-based communications.
Last but not least, in the U.S. patent application by Brodsky et al. [23] was described a system and method for obtaining communications between plurality of users over an optical network. The system used a source optical generator to generate entangled photon pairs. Therefore, considering the state of the art just described, we can conclude that the information, entangled between the different photons, can be delivered to the drivers via optics, acquired from them and after that used.
A second very important characteristic is developed in the present work. In fact, in the present work, the corrections of the set position for the N slaves are obtaining developing the ideas contained in the U.S. patent application (2013) by Ulyanov [24]. In that work, a self organizing controller was described, including a quantum inference unit that can generate a set of robust linear control gains. The quantum inference unit included a quantum correlator configured to generate a plurality of quantum states based on a plurality of controller parameters and a correlation type.
Instead of that, in our work, a nonlinear correction method was developed, based on the same quantum inference model described in the aforementioned work of Ulyanov and on the work of Gough [25] relative to a quantum Kalman filter-based proportional, integral, and derivative. (PID) controller.
Summing up, in the present work we develop a method and a system for defining a motion control system, using quantum-entangled photons to transmit without jitter the data to the axes and using a quantum inference Unit to generate a set of nonlinear control gains.
The present work represents a consistent improvement in the state of the art relative to the motion controllers for automatic application. The great advantage of the system described in the present work as regards the previous motion control systems is that the data transmitted simultaneously in the motion bus, due to the entangled property of the transmitted photons, are entirely consistent with each other and, as consequence, perfectly synchronized. This property produces a perfect consistency among the target positions sent to the N axes and produces the same perfect consistency among the actual positions acquired by the N axes. So, the “Synchronization Jitter” is canceled. Besides, using a quantum inference unit to generate a set of nonlinear (or PID) control gains, we can define a quantum control system able to elaborate the data arriving from the N axes.
This paper is organized as follows. In Section 2, the architecture of a motion control system is described, detailing the different elements. A position control ring in a motion control system is also described, which is the core of the system. In Section 3, a detailed description of the novel architecture of a quantum motion control is given, emphasizing the role of the devices used as optical generator of entangled photons. In this section, the quantum non-linear correction unit based on quantum inference is also detailed. Besides, an optimal mode for carrying out the quantum motion control is presented. At the end, in Section 4 concluding remarks are defined.
2 Actual architecture of a motion control
The following detailed description includes an explanation of a quantum motion controller and an explanation of a possible correction module included in the quantum motion controller. A way of carrying out the system will be described with reference to the accompanying drawing figures. Before explaining in detail the method, it is to be understood that the present work is not limited in its application to the details of the examples explained in the following description or illustrated in the figures. The method is capable of other ways of realizing and of being carried out in a variety of applications and various ways.
The most important control functions for packaging motion controllers can be considered, today, electronic gearing and Cam profiling. In the first one, the electronic gearing, the position of a slave axis is mathematically linked to the position of a master axis. A good example of this would be a system where two rotating drums turn at a given ratio to each other. A more advanced case of electronic gearing is electronic camming or said also cam profiling. With electronic camming, a slave axis follows a defined profile that is a function of the master position. Very often the master axis is a virtual axis.
The control system described below is designed to be installed in an automation system that is responsible for the controlling of the movement relative to a packaging machine with high-performances in terms of productivity and precision of the results.
2.1 Description of the architecture
The architecture of a motion control system is based on a system called “axis control” which is described in detail in Figure 1 and which consists of the following elements:
A motion controller unit 100 characterized by the following three sub-units:
A logic control unit 101, typically defined as programmable logic controller (Plc), is used for developing the required programmed logic steps, necessary to control the axes in the different motion situations: during the production, when some trouble is verified, etc.
A function unit 102 for generating a motion profile, having the task of generating a reference profile for the movement;
A position controller unit 103 for generating set points (for motion profile in closed-loop systems) to close a position/velocity feedback loop;
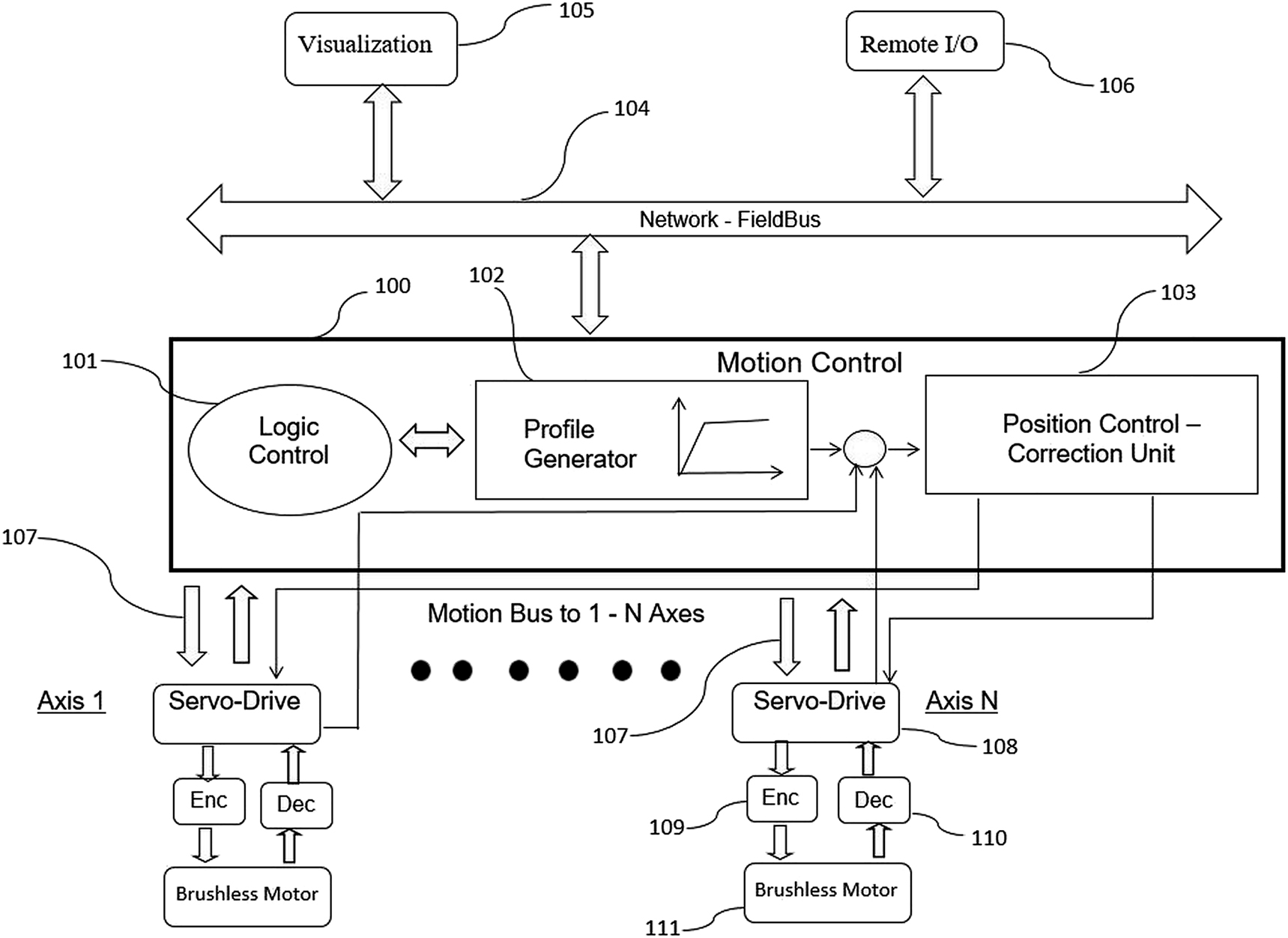
A detailed example relative to an architecture of a motion control system. The motion controller is represented, with his most important elements contained in it, plus the field-bus and the motion-bus to the N axes.
Furthermore, the motion control system is characterized by the following elements:
A drive or amplifier 108 for transforming the control signal from the motion controller into electric energy that is supplied to the actuator. Some newer “intelligent” drives can close the position and velocity loops internally, resulting in a very accurate control;
A prime mover or actuator such as a hydraulic pump, pneumatic cylinder, linear actuator, or electric motor 111 which transforms the electrical power into mechanical power. Mechanical components to transform the motion of the actuators into the desired motion, including gears, shafting, ball screw, belts, linkages, and linear or rotational bearings.
A position sensor (encoder 109 or resolver 110) for returning the position or the velocity of the actuator to the motion controller, to close the position or velocity control loops. That is in closed-loop systems.
Drivers plus prime mover plus position sensors together constitute the electric axis. Typically, a motion controller governs N different axes.
The motion bus 107, which is the physical and logical interface between the motion controller and the drives.
A field-bus 104, used to connect the elements of the motion controller system whose information can be transmitted in a nondeterministic way.
A display element 105 which is used as a control console and control system by the operator.
The input/outputs 106 necessary for the system, connected remotely to the controller via the field-bus.
2.2 Position control ring in a motion control system
A basic diagram of the control ring for the motion position in the closed-loop is shown in Figure 2.
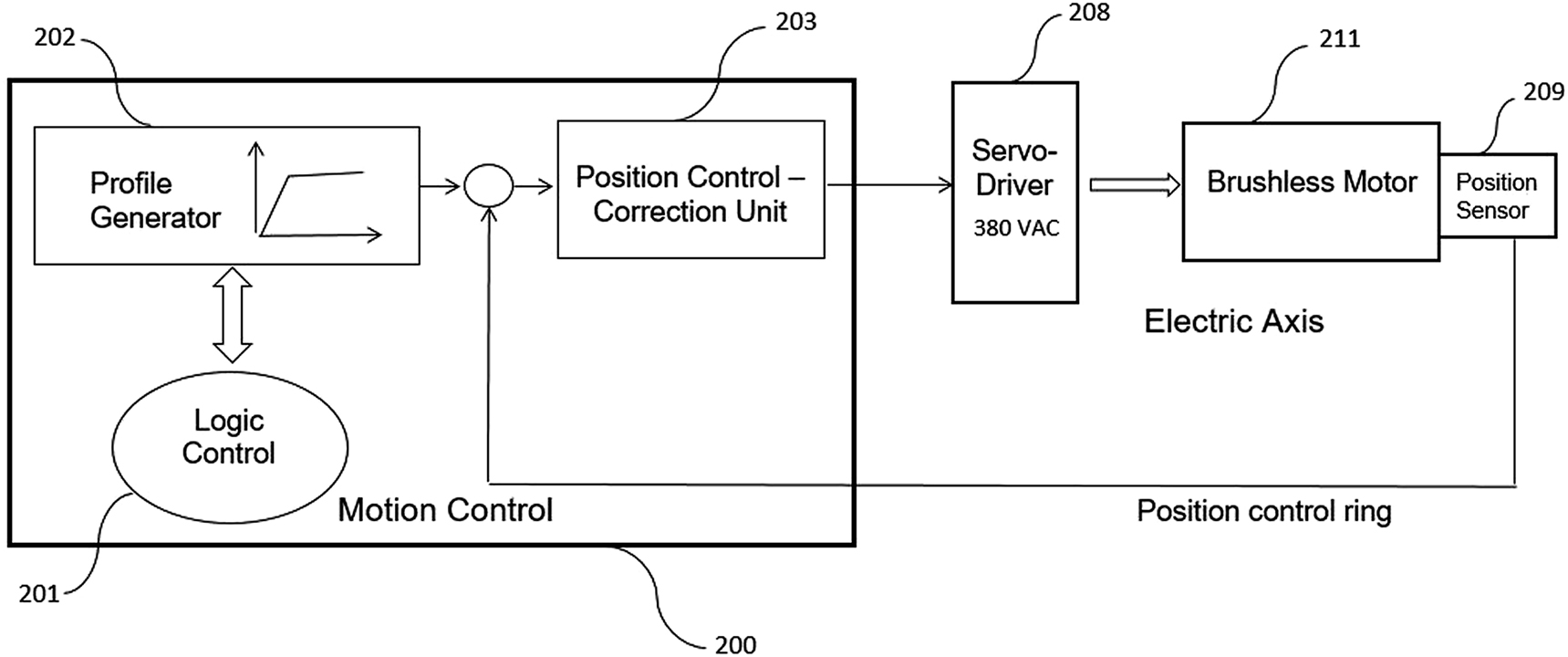
A diagram of the control ring for the position control system relative to a single “axis”. The same control rings are necessary for all the axes in the motion control system.
The system is based on a position control ring including the position controller 203, an electronic amplifier (driver) 208, an electric motor 211 and a position sensor 209.
Usually, the control rule is implemented using a trajectory generator 202 integrated into the motion controller 200 (as seen in Figure 1), just as the logic controller 201 and the position controller 203 are integrated therein.
The driver interposed between the motion controller and the electric motor is used for amplifying the control signal by supplying the electrical power necessary to power the motor in a controlled manner. Typically, the speed and torque control rings supplied by the motor are closed in the driver. In this case, the driver not only implements power amplification but also implements a complex law, dependent on the characteristics of the electric motor.
3 Quantum motion control
3.1 Detailed description
As previously described, the motion bus is a synchronous bus which is so-called because all the activities on that bus are synchronized using a clock. Therefore, as far as the deterministic part of the motion bus is concerned, it is fundamental that there is a synchronism as exact as possible between the communications that the master makes with the N slave axes.
The great advantage obtained with this new system compared to the existing motion controls is given by the fact that two optical generator units of entangled photons are introduced. That is made in order to perform a perfect synchronism between the N target positions transmitted from the master (virtual) to the N slaves, as well as in order to perform a perfect synchronism between the actual N positions transmitted by the position sensors to the master controller.
Referring to Figure 3, there is depicted, in a detailed way, a representation of this new system.
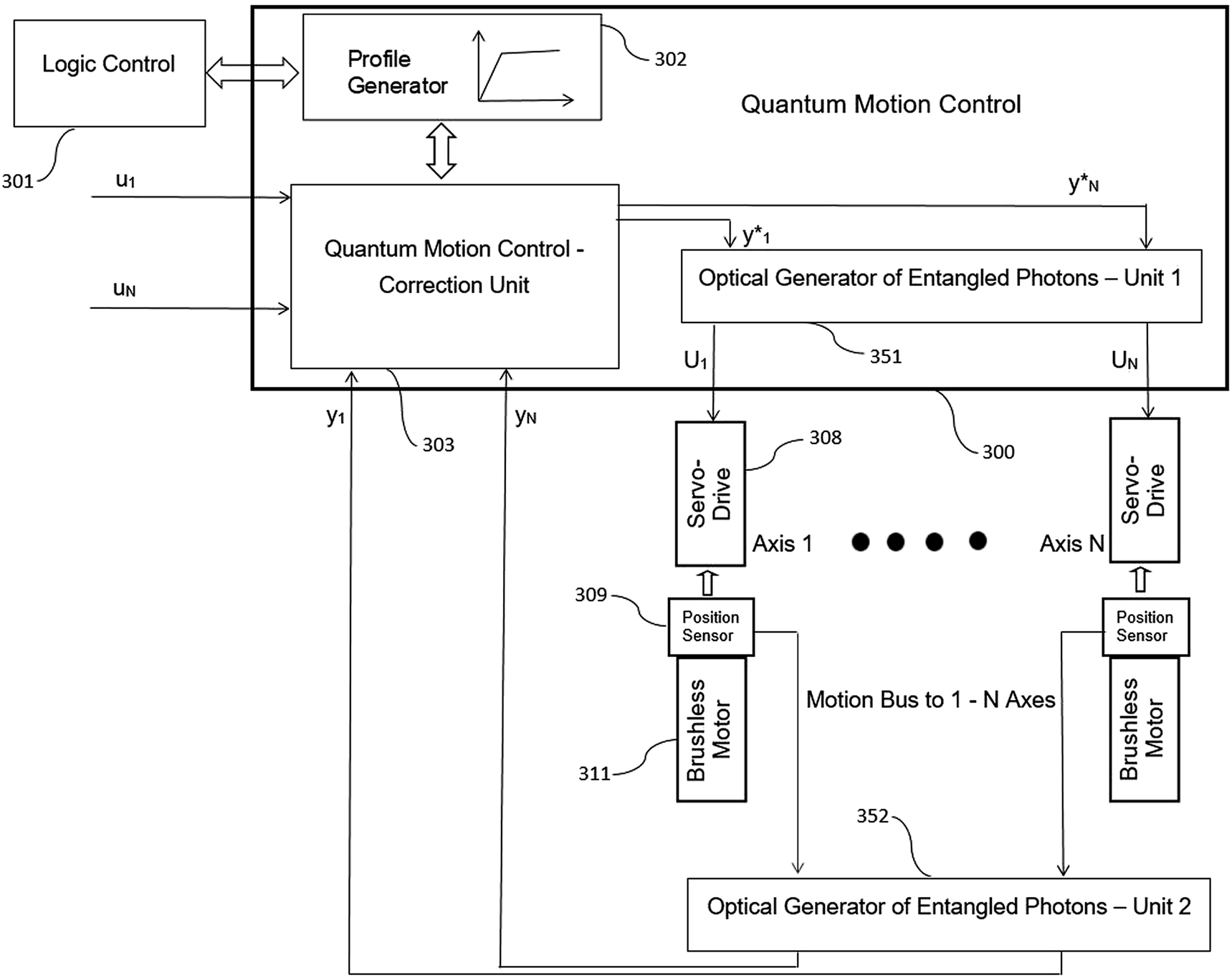
The novel architecture for the quantum motion control. A detailed diagram is depicted, with the representation of the main processes performed.
The central device 300 of the quantum motion control includes means for elaborating the necessary information in order to control the position of the N axes in movement. These means can consist of a correction unit 303 included in the quantum motion control device. Furthermore, these means can consist also of a profile generator 302 for generating a motion profile, having the task of generating a reference profile for the actuator movement. Again, the central device 300 of the quantum motion control includes also the means to generate optical information consisting of entangled photons. These means can consist, as in the realized example, of a first device 351 having the task of being an optical generator of entangled photons.
In turn, profile generator 302 includes means to exchange information with the logic control device 301. Concretely, the logic control device 301, as defined in this invention, can be a programmable logic controller. This device can be physically separated from the central device 300 of the quantum motion control or it can be included in the central device 300.
The above-mentioned information exchanged with the logic control device 301 is used for the following purposes:
Define when exchanging information with the N axes;
Define the management of the starts and stops of the N axes in order to start and finish the movements of the N axes;
Define the management of the malfunctions in the production activity controlled by the central device 300.
Considering the correction unit 303, it includes means for receiving the information u 1, u 2, …, u N , which represent the set-point positions with respect to the N axes 1, 2, …, N. These means can be analog inputs or information arriving via field-bus from a control/command console.
Again, the correction unit 303 includes also means for receiving information y 1, y 2, …, y N which represent the values of the actual positions relative to the N axes 1, 2, …, N. Such means can be, for example, inputs that represent optical information arriving from the device 352 described below.
Furthermore, the correction unit 303 also includes means for sending the information
In turn, the 351 device includes means for receiving from the correction unit 303 the information
Again, the first device 351 having the task of being an optical generator of entangled photons includes also means for sending the information U 1, U 2, …, U N to the N axes 1, 2, …, N. The information U 1, U 2, …, U N represent the N set-point positions comprising the correction, after these set-points have been subjected, within the device 351, to the entanglement procedure between the photons carrying the information in them contained. These means used to send information U 1, U 2, …, U N can be, for example, outputs that process the optical information obtained with the entanglement procedure in device 351.
Furthermore, the device 351 includes also means for implementing the photons entanglement procedure; those photons now carry the information given by the set-points with correction defined as
As regards the different ways in which we can practically realize the photons entanglement procedure in device 351, we refer to the different existing patents, mentioned in Section 1 of this work. In those patents, these modes of realization of different possible systems of entangled photons are described in detail.
Moreover, for the definition and the realization of the system for the transport of the information included in the entangled photons, we refer to the methods and systems described in the two articles published on Nature Photonics in 2016 and previously mentioned in Section 1 of this work.
It follows that the information U 1, U 2, …, U N carried by the entangled photons reaches the servo-drives 308 and, then, the phenomenon of decoherence occurs. This, however, does not affect the information already conveyed and delivered to individual drivers via the optical path.
Corresponding to what was described previously about Figure 2, the position sensors 309 of the N axes 1, 2, …, N must send to the correction unit 303 the information given by the actual position of the corresponding axis. The position sensor is connected to the brushless motor 311 or, in any case, to the electric motor that produces the necessary energy to move the mechanical part of the axis.
Innovatively, in this method, the information given by the actual position of the single-axis is sent, in a preliminary step, to a second device 352 having the task of being an optical generator of entangled photons.
Device 352 includes means to send the information y 1, y 2, …, y N to the correction unit 303 included in the central device 300 of the quantum motion control. The information y 1, y 2, …, y N represents the N actual positions of the axes after this information has been subjected, inside the device 352, to the entangled photons generation process. These means used to send the information y 1, y 2, …, y N can be, for example, outputs that process the optical information obtained with the entanglement procedure in the device 352.
Further, device 352 includes also means for implementing the photons entanglement process; those photons carry out the information given by the actual positions defined as y 1, y 2, …, y N . As regards the different ways in which we can practically realize the photons entanglement process in device 352, we refer to the different existing patents, mentioned in Section 1 of this work. In those patents, these methods of realization of different possible entangled photons systems are described in detail.
Moreover, for the definition and the realization of the system for the transport of the information from the second entangled photons generation unit to the quantum motion control device, we refer to the methods and systems described in the two articles published on Nature Photonics in the 2016 and previously mentioned. In this way, the information given by the actual positions arrives in the correction unit into the quantum motion control device and the control loop is closed, as it should be in a motion control system with high performances.
3.2 Quantum nonlinear correction unit
In the present work, concerning Figure 4, the data processing which occurs internally to the correction unit 403, included in the central device of the quantum motion control, is schematized, following the guidelines developed in the U.S. patent application US 2013/0096698 A1 to S. Ulyanov.
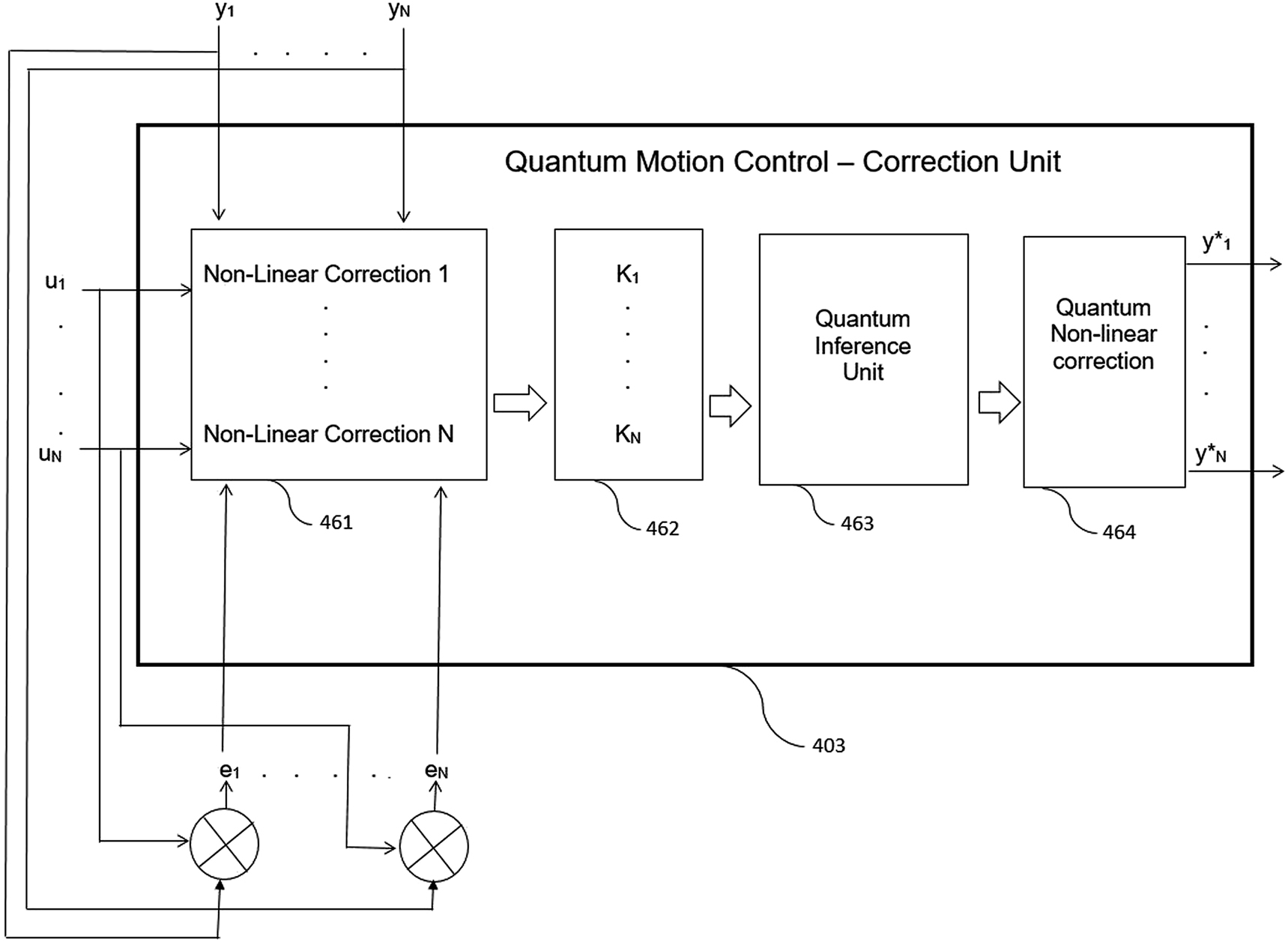
A quantum nonlinear correction unit, included in the quantum motion control device, is based on quantum inference. A block diagram, describing the subsequent steps for obtaining the correction to the set-position, is depicted.
As a consequence of that, in Figure 4, we show an example of a quantum nonlinear correction unit 403 included in the quantum motion control device and based on quantum inference. Referring to Figure 4, we define a block diagram describing the subsequent steps for obtaining the correction to the set-position, based on the actual position of the axes.
A self organizing controller is described, including a quantum inference unit 463 that can generate a set of robust control gains. The quantum inference unit 463 includes a quantum correlator configured for generating a plurality of quantum states based on a plurality of controller parameters and a correlation type.
Practically, the actual positions defined as y
1, y
2, …, y
N
. are subtracted to the set-point positions u
1, u
2, …, u
N
, relating, respectively, to the N axes 1, 2, …, N. That is made in order to obtain the differences e
1, e
2, …, e
N
. These differences allow calculating the nonlinear corrections 461 for the set-points with correction defined as
Once the correction coefficients K
1, K
2, …, K
N
are established in step 462 and after that the robustness of the control system has been implemented internally to the quantum inference unit 463, the quantum nonlinear corrections can be defined in step 464. In this way, the set-points with correction
3.3 Robust control in the quantum correction unit
In order to define the robustness of the proposed quantum motion control scheme we will refer to Figure 5 that shows, in a detailed way, the feedback loop that was schematized in a general form in the previous subsection. That is implemented internally to the quantum inference unit.
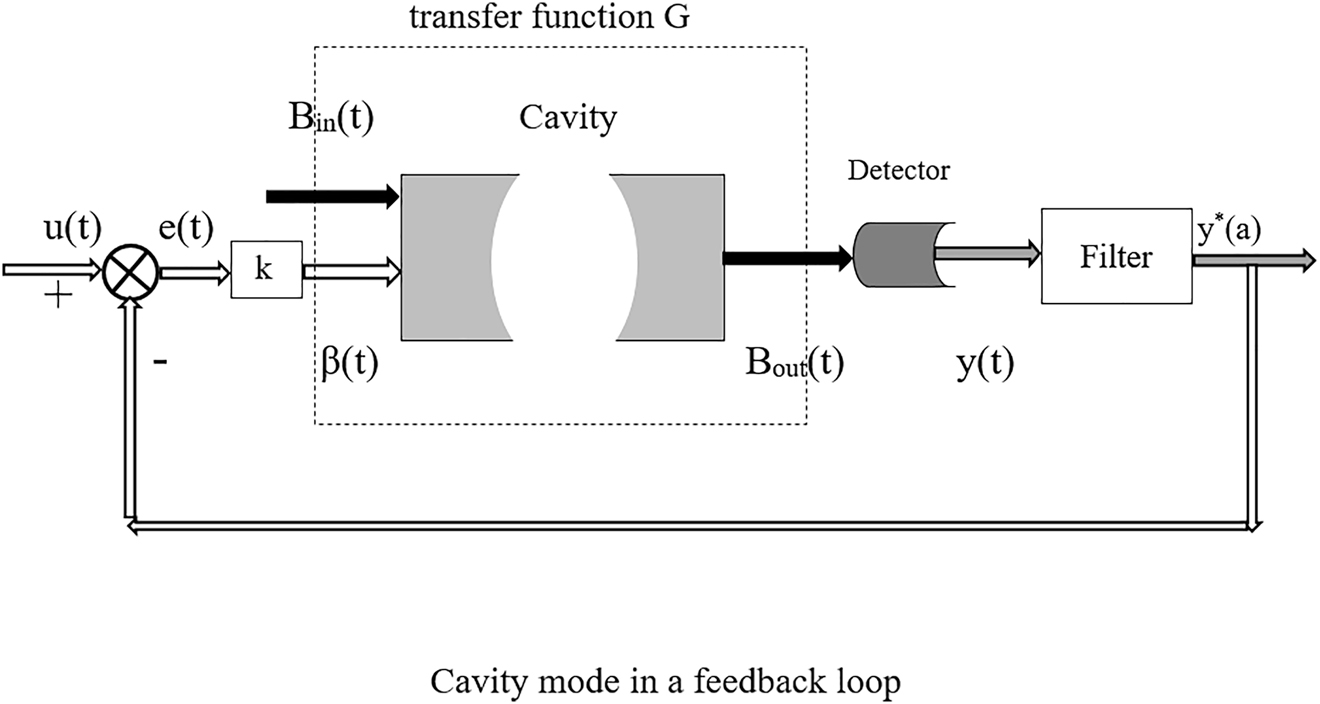
The feedback loop going through the cavity mode. It is highlighted the transfer function G. That is implemented internally to the quantum inference unit.
We refer in this section to only an axis. The same loop has to be considered for each axis in the quantum motion controller.
In recent work, Gough [25] defined a controlled quantum stochastic dynamical model, defined as a cavity mode, with a PID controller acting on the filtered estimate output y. We will base on that work for defining the robust control of the quantum motion controller. Therefore, the theory that is described below is basically defined on what is described in the work of Gough [25].
For now, we will focus on the linear solution. The robustness of the nonlinear solution will be the subject of a further study which is currently under preparation.
In Figure 5 we will use white double-lined arrows to denote classical signals in feedback block diagrams and single-line arrows (gray or black) for quantum signals.
The most used control algorithm in classical feedback applications are the PID controllers, with PI action used as most common form. For them, we have the input–output relation:
where the constants k P , k I , k D are the PID gains, respectively. The associated transfer function is K(s) = k P + s −1 k I + sk D .
The goal of filtering theory is to make an optimal estimate of the state of a system under conditions where the system may have noisy dynamics, and where may have only partial information which also is subject to observation noise.
In order to go deep into the definition of the correction unit in the quantum motion controller, schematized in Figure 4, we consider the diagram in Figure 5, where we represent the realized closed-loop for obtaining the single set-points with correction
Considering a system that is supposed to evolve according to linear but noisy dynamics of the form
where the x k are the state at time k, the u k are control variables, and w k are errors. Our knowledge is based on measurements that explain only partial information about the state and also present noise. Specifically, the measure y k at time k was
The random variables w k , v k are the dynamical noise and measurement noise and follow a Gaussian profile.
The Kalman filter is a recursive estimation scheme, requiring minimal storage of information, valid for Gaussian models. Considering the best estimation
If this error is zero, then the prediction is exact, and we can use the prediction x
k
as an estimation for the state at time k. Otherwise, we can apply in a recursive way the Kalman filter, setting
The theory of quantum filtering was developed by Belavkin [26], and represents the continuation of the works of Kalman, Stratanovich, Zakai, etc. Qubits pass through a cavity (Figure 5) one by one. We measure the outgoing qubits one-by-one. The measurement bit y k is sent into a filter that estimates the state of the cavity mode, and then the instruction is sent to the actuator in order to have the control of the mode.
In our quantum model, based on the traditional Kalman filter, we monitor a cavity model. We will refer to the notation used in [27, 28] and to the development defined in those works relative to the quantum filters. We denote the mode by a. The transfer function G for a quantum system driven by boson fields is defined given the SLH-coefficients component the transfer function G. We consider the S, L, H components of the triple operator (the transfer function G) which represents the coupling between an individual node of a network (in this case atoms in a cavity), and the interacting quantum field. These S, L, H coefficients are obtained in the following way:
where β [[Z]](t) is an unspecified complex-valued adapted process controlled by Z. Z is defined as Z(t) = B in(t) + B in(t)* and Y is given by Y(t) = B out(t) + B out(t)* (see Figure 5). This in the hypothesis of quadrature between the measurements. For more details relatively to the SLH formalism see [29].
The Heisemberg–Langevin equation satisfied by
This is the output form of the control process. If we measure the situation in which θ = 0, then the Belavkin–Lalman output filter (see [25]) for
where the innovation is
Reverting back the signal to the input (see Figure 5) and starting by Eq. (6), we obtain for the feedback signal the corresponding equation relative to the input filter (see [25]):
where
Referring to Figure 5, closing the feedback loop we take:
In Eq. (11) we included a reference signal u(t) and computed the error
When k → ∞, we can expect the cavity mode to track the reference signal u(t). More generally, we consider a proportional-integral (PI) controller having the output given by Eq. (1) without the derivative term. We will denote the Laplace transform of a function f = f(t) by
where the open-loop function transfer for the system mode is
For the PI problem, the closed-loop transfer function is:
For the PID problem, the closed-loop transfer function should be:
However, there is a problem. The error is the difference between the reference signal and the filtered estimate
3.4 Comparison with traditional motion control: improving performance for the jitter compensation
In order to consider a comparison between the performances of traditional motion control and the proposed quantum motion control, we will focus our interest on the jitter compensation.
Leveraging the ideas from [30], the periodic task model considers a digital control system set. It is implemented as a periodic task set T i ∈ T 1, T 2, …, T n . T i corresponds to an individual control task, and it has an infinity job set J i,j ∈ J i,1, J i,2, …. The job J i,j is an instantiation of a control task T i .
Figure 6 depicts a timing diagram of control task T i for four consecutive jobs J i,k−2 to J i,k+1.
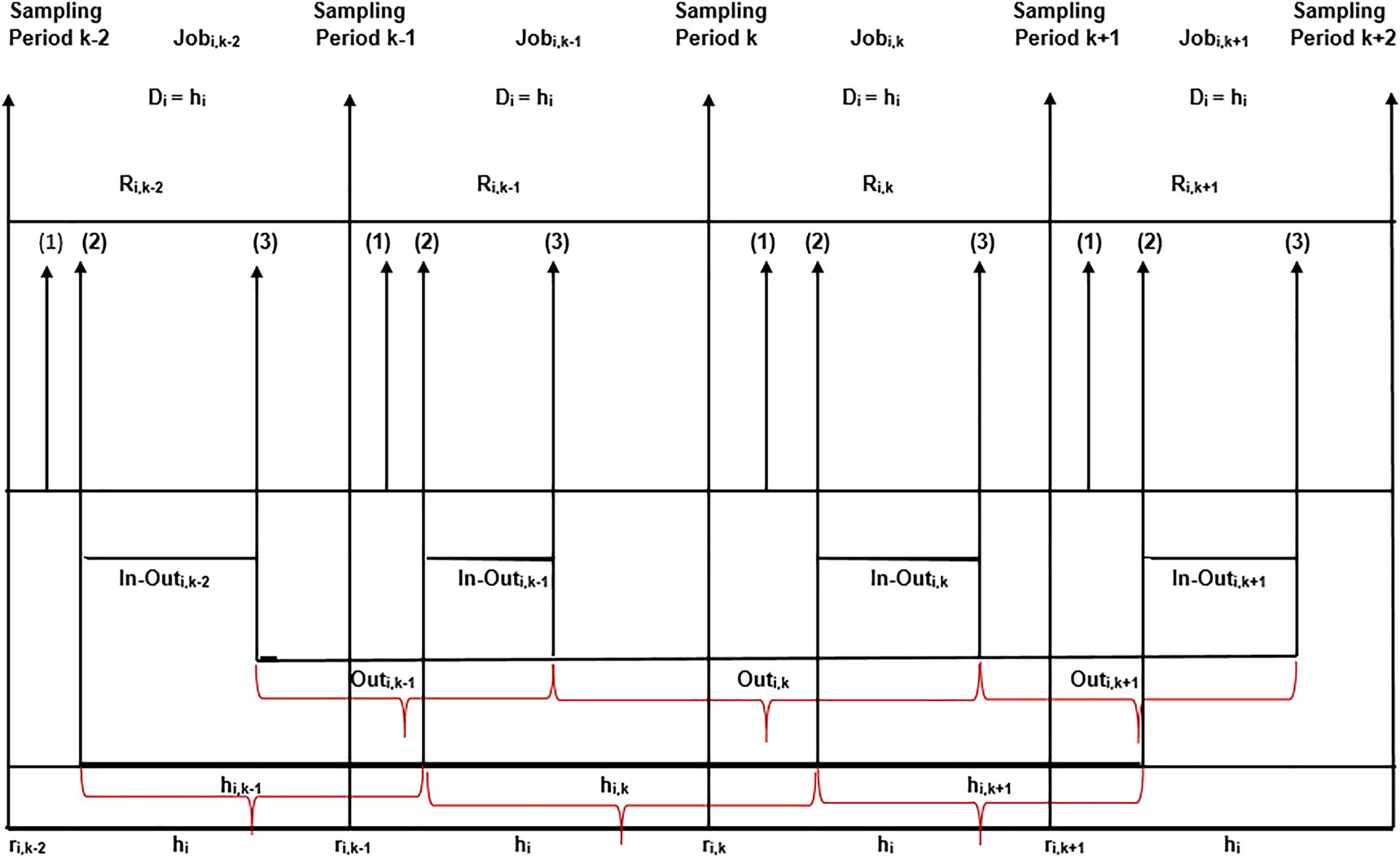
A timing diagram of control task T i for four consecutive jobs J i,k−2 to J i,k+1.
The relative deadline D i of each control task T i is equal to its sampling period h i . Furthermore, the relative deadline D i for the job J i,j is measured from its release time r i,j . The response time R i,j is the necessary time until the control law is output relatively to the job J i,j . InOut i,j is the time to output the control law by the digital to analog converter (DAC) relative to the start of sampling the inputs for job J i,j (time between events (2) and (3) in Figure 6). Out i,j is the time between outputting the control law (event (3) in Figure 6) for jobs J i,j−1 and J i,j . h i,j is the time between sampling points (event (2) in Figure 6) for jobs J i,j−1 and J i,j . h i,j is defined as the “sampling interval” for job J i,j . In fact, in a realistic implementation of a motion controller, all three events (1), (2) and (3) are delayed from their original timing instant. For example, event (3) is delayed by InOut i,j relative to event (2).
Because a motion controller has periodic events, the timing of these events can vary from one period to another. This phenomenon is defined as “Jitter”. We will consider four jitter terms:
“Input–Output Jitter”: the variation of InOut i,j for T i .
“Output Jitter”: the variation of Out i,j for T i .
“Sampling Jitter”: the variation of the “sampling interval” h i,j for T i .
“Synchronization Jitter”: the variation time ΔT i between the different command signals that, for each T i , the motion controller send to the 1…N different controlled axes. In other words, this is the jitter which is introduced when considering N axes that must be coordinated simultaneously by the motion controller.
As we can note in Figure 6, the notion of sampling interval is not the same as the sampling period in the context of executing multiple control tasks on the same processor.
In fact, the sampling period is always equal to h i for the task T i . On the other hand, the sampling interval for job J i,j at times can be 0 < h i,j < h i or at times can be h i < h i,j < 2h i . In other words, that is fundamental in the definition of the jitter of a motion controller and therefore in the precision relative to a positioning command for a controlled axis.
Analyzing the characteristics described in the previous sections relative to the quantum motion controller, and defining the performance improvements compared to the traditional motion controllers, we can deduce that the first three types of jitter are not modified with the introduction of a quantum motion controller.
Both the “Input–Output Jitter”, the “Output Jitter” and the “Sampling Jitter” are not affected by the new configuration of the motion controller. On the other hand, the case of the “Synchronization Jitter” is different. As described in the Introduction, considering the deterministic part of the communication cycle, the motion controller will send the target positions to the axes in a synchronized manner and will receive the actual positions in an equally synchronous manner from the axes themselves. It is therefore essential that there is a synchronism as exact as possible between the communications that the master makes with the N slave axes. Even a 1 micros “Synchronization Jitter” can generate accumulative errors in the final element of the kinematic chain that is the prime mover.
In the present work, we defined a system where the data are exchanged between the controller master and the different slave drives taking advantage of the quantum system properties. Exactly, we use the entanglement property of the photons generated in the optical units for having a perfect synchronization among the N target positions sent, in the same instant t, to the N slave drives and the same perfect synchronization among the N actual positions received, subsequently, from the N slave drives.
This is the considerable improvement obtained in the solution presented in this work: The achievement to eliminate the “Synchronization Jitter” between the signal transmitted and received by the N slave axes.
3.5 Best mode for carrying out the quantum motion control
The logical flow of information that, in practice, occurs when this method is carried out, it is the following.
Considering the case of a packaging machine, the required data, both for the setting of the machine and for the setting of the various possible formats of the products that must be packaged, are inserted through a display unit that acts as a supervision unit.
Simultaneously one or more operators, using command keyboards, send either the start command or the stop in ramp command or the emergency stop command, necessary to command the movement of the axes of the packaging machine. These data, from the display and the command consoles, are sent, typically via a field-bus, both to the logic control device (typically, a Plc that can also be integrated into the motion control device) and to the unit that generates the motion profiles internally to the motion control device.
At this point, based on the machine commands received from the motion control device, the next step consists of the definition, inside the unit that generates the motion profiles, of the motion profiles related to the machine axes. These motion profiles will generate electronic cams that will be different depending on the type of “axes” that must command (linear, rotating, epicyclical, etc.), and on the command received by the operator (run, ramp stop, emergency stop, etc.).
The next logical step is obtained in the quantum nonlinear correction unit, where the actual positions of the “axes” are subtracted to the respective set-point positions: that is made in order to obtain the error differences. These differences allow for calculating the nonlinear corrections for the set-points with correction.
Once the correction coefficients are obtained, and after that the robustness of the control system has been increased using the quantum inference unit, the nonlinear corrections are defined in this step.
Now, the nonlinear corrections are sent from the quantum nonlinear correction unit to the first device having the task of being an optical generator of entangled photons.
In a first possible representation, the information relative to the N axes, which symbolize the set-point positions with correction, can be sent using an internal bus or using an analog connection. Corresponding, also the fundamental information of the clock used for synchronizing the information representing the set-point positions to send to the N axes, is sent to the first optical generator of entangled photons.
In this kind of representation, the first device having the task of being an optical generator of entangled photons simply receive the information representing the set-point positions with correction relative to the N axes and sends directly them to the N axes.
Besides, always considering this first possible representation and using the U.S. patent application US 8242435 B2 to Shin Arahira, the entangled photons, symbolizing the clock used for synchronizing the set positions for the N axes, are obtained starting from an excitation light (resulting from the clock signal). It is split into two components with mutually orthogonal polarization. In the unit, as described in the considered patent, at the end of the process, idler photons and signal entangled photons are obtained. The second represents the clock signals that are sent to the N axes.
On the other hand, in a second possible representation, the signal entangled photons obtained, at the end of the described process, also contain the information representing the set-point positions with correction relative to the N axes and not only the clock used for synchronizing the information representing the same set-point positions.
As the next step, we consider the system for the transport of the information included in the entangled photons. Regarding that, we refer to the methods and systems described in the two articles published on Nature Photonics in 2016 and previously mentioned.
Following what is described in those articles, we can define an optical-fiber-based quantum network. This network is robust against noise in the real environment with active stabilization strategies, and this property allows for realizing quantum teleportation with all the ingredients simultaneously.
Therefore, it follows that the information carried by the entangled photons reaches the servo-drives via the optical path.
After that, in the logical flow of information, the position sensors of the N axes send the information given by the actual positions of the single axes to a second device having the task of being an optical generator of entangled photons.
This device works in the same way and with the same characteristics of the first optical generator of entangled photons and produces, at the end of his internal process, the “entangled” information given by the actual positions of the single axes. These data are sent, using the system for the transport of the entangled photons previously described, to the correction unit in the quantum motion control device.
The control loop is thus closed and the system can process, in a subsequent cycle, the information coming from the command data entry systems.
4 Conclusion
This work describes a method and a system for realizing a quantum motion controller.
In particular, in this work, two devices having the task of being an optical generator of entangled photons are implemented in the architecture of the motion controller. That is realized in order to obtain an ideally perfect synchronization of the information exchanged between the N slave drives and the motion controller.
Besides, a quantum nonlinear correction subdevice, included in the quantum motion control device and based on quantum inference, is implemented into the system.
-
Author contribution: All the authors have accepted responsibility for the entire content of this submitted manuscript and approved submission.
-
Research funding: None declared.
-
Conflict of interest statement: The authors declare no conflicts of interest regarding this article.
References
[1] R. P. L. Caporali, “Method and Device to control in open-loop the sway of pay-load for Slewing Cranes,” Patent EP 2896590, Jul. 22, 2015. Available at: Google Patents.Suche in Google Scholar
[2] R. P. L. Caporali, “Iterative method for controlling with a command profile the sway of a payload for gantry and overhead traveling cranes,” Int. J. Innov. Comput. Inf. Control, vol. 14, no. 3, pp. 1095–1112, 2018, Available at: http://www.ijicic.org/ijicic-140401.pdf.Suche in Google Scholar
[3] L. Pengfei, H. Yuping, W. Yanbo, Z. Quing, and Y. Zelin, “Design of multi-axis motion control and drive system based on internet,” in Presented at the 22nd Int. Conf. on Electrical Machines and Systems (ICEMS), Harbin, China, 2019, Available at: https://ieeexplore.ieee.org/document/8921848.10.1109/ICEMS.2019.8921848Suche in Google Scholar
[4] D. Zhao, J. Gui, J. Yang, S. Li, and W. Cao, “Sliding mode control with extended state observer for multi-axis motion control system,” in Presented at the 2019 Chinese Control Conference (CCC), Guangzhou, China, 2019, Available at: https://ieeexplore.ieee.org/document/8865713.10.23919/ChiCC.2019.8865713Suche in Google Scholar
[5] Z. Zeng, Y. He, Y. Hu, et al.., “Fine tuning development software for high precision and Multi-Axis Motion Control System,” in Presented at the 18th International Conference on Electronic Packaging Technology (ICEPT), Harbin, China, 2017, Available at: https://ieeexplore.ieee.org/document/8046591.10.1109/ICEPT.2017.8046591Suche in Google Scholar
[6] S. A. Berestova, N. E. Misyura, and E. A. Mityushov, “Mechanics of smooth coordinated motion of multi-Axis mechatronic device,” in Presented at the 2019 International Russian Automation Conference (RusAutoCon), Sochi, Russia, 2019, Available at: https://ieeexplore.ieee.org/document/8867730.10.1109/RUSAUTOCON.2019.8867730Suche in Google Scholar
[7] C. Hu, T. Ou, H. Chang, Z. Yu, and L. Zhu, “Deep GRU neural-network prediction and feedforward compensation for precision multi-Axis motion control systems,” IEEE ASME Trans. Mechatron., vol. 25, pp. 1377–1388, 2020. https://doi.org/10.1109/TMECH.2020.2975343.Suche in Google Scholar
[8] G. Zhong, Z. Shao, H. Deng, and J. Ren, “Precise position synchronous control for multi-Axis servo systems,” IEEE Trans. Ind. Electron., vol. 64, pp. 3707–3717, 2017. https://doi.org/10.1109/TIE.2017.2652343.Suche in Google Scholar
[9] M. Tiapkin, D. Elenskiy, and A. Balkovoi, “Observer-based control system design of high performance motion system with parallel kinematics,” in Presented at the 2018 X International Conference on Electrical Power Drive Systems (ICEPDS), Novocherkassk, Russia, 2018, Available at: https://ieeexplore.ieee.org/document/8571480.10.1109/ICEPDS.2018.8571480Suche in Google Scholar
[10] J. Sorensen, D. O’Sullivan, and C. Aaen, “Synchronization of multi-Axis motion control over real-time networks,” in Presented at the 2018; International Exhibition and Conference for Power Electronics, Intelligent Motion, Nuremberg, Germany, Renewable Energy and Energy Management, 2018, Available at: https://ieeexplore.ieee.org/document/8402996.Suche in Google Scholar
[11] C. Ma, X. Zhang, Y. Yan, and T. Shi, “Predictive contour control for multi-axis motion system with unified model,” in Presented at the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 2019, Available at: https://ieeexplore.ieee.org/document/8921467.10.1109/ICEMS.2019.8921467Suche in Google Scholar
[12] Z. Liu and J. Yang, “Sliding-mode control-based adaptive PID control with compensation controller for motion synchronization of dual servo system,” in Presented at the 2017 36th Chinese Control Conference (CCC), Dalian, China, 2017, Available at: https://ieeexplore.ieee.org/document/8028133.10.23919/ChiCC.2017.8028133Suche in Google Scholar
[13] E. Fertig, “Packaging machine and method for controlling a packaging machine,” Patent EP 1431187 A3, Jun. 23, 2004. Available: Google Patents.Suche in Google Scholar
[14] S. Konze, P. Theissen, and L. Merten, “Method for controlling a packaging machine and a Packaging machine,” Patent US 2017/0001744 A1, Jan. 5, 2017. Available: Google Patents.Suche in Google Scholar
[15] L. Biagiotti, C. Melchiorri, M. Pilati, G. Mazzucchetti, G. Collepalumbo, and P. Ragazzini, “Integration of robotic systems in a packaging machine: a tool for design and simulation of efficient motion trajectories,” in Presented at the 2013 IEEE 18th Conference on Emerging Technologies Factory and Automation (ETFA), Cagliari, Italy, 2013, Available at: https://ieeexplore.ieee.org/document/6648125.10.1109/ETFA.2013.6648125Suche in Google Scholar
[16] S. Ulyanov, G. Rizzotto, I. Kurawaki, et al.., “Method and Hardware Architecture for controlling a process or for processing data based on a quantum soft computing,” Patent WO/2001/067186, Sep. 13, 2001. Available at: Google Patents.Suche in Google Scholar
[17] G. Kanter and S. Wang, “System and method for entangled photons generation and measurement,” Patent US 2010/0309469 A1, Feb. 26, 2010. Available at: Google Patents.Suche in Google Scholar
[18] K. Edamatsu, R. Shimizu, and S. Nagano, “Non-degenerate polarization-entangled photon pair generation device and non-degenerate polarization-entangled photon pair generation method,” Patent US 2012/8173982 B2, May 26, 2012. Available at: Google Patents.Suche in Google Scholar
[19] P. Senellart and A. Dousse, “Polarization-entangled photon pair source and method for the manufacture thereof,” Patent EP 2526459 A1, Nov. 28, 2012. Available at: Google Patents.Suche in Google Scholar
[20] S. Arahira, “Quantum entangled photon pair generating device and method,” Patent US 2012/0051740A1, Mar. 01, 2012. Available at: Google Patents.Suche in Google Scholar
[21] S. Qi-Chao, M. Ya-Li, C. Si-Jing, et al.., “Quantum teleportation with independent sources and prior entanglement distribution over a network,” Nat. Photonics, vol. 10, pp. 671–675, 2016, Available at: https://www.nature.com/articles/nphoton.2016.179.10.1038/nphoton.2016.179Suche in Google Scholar
[22] R. Valivarthi, M. Grimau Puigibert, Z. Quiang, et al.., “Quantum teleportation across a metropolitan fibre network,” Nat. Photonics, vol. 10, pp. 676–680, 2016. https://doi.org/10.1038/nphoton.2016.180.Suche in Google Scholar
[23] M. Brodsky and M. Feuer, “Architecture for reconfigurable quantum key distribution networks based on entangled photons directed by a wavelength selective switch,” Patent US 2012/8311221 B2, Nov. 13, 2012. Available at: Google Patents.Suche in Google Scholar
[24] S. Ulyanov, “Self-organizing quantum robust control methods and systems for situations with uncertainty and risk,” Patent US 2014/8788450 B2, Jul. 22, 2014. Available at: Google Patents.Suche in Google Scholar
[25] J. E. Gough, “A quantum Kalman filter-based PID controller,” Open Syst. Inf. Dynam., vol. 27, no. 3, 2020. https://doi.org/10.1142/s1230161220500146.Suche in Google Scholar
[26] V. P. Belavkin, “Non-Demolition measurements, nonlinear filtering and dynamic programming of quantum stochastic processes,” Lect. Notes Contr. Inf. Sci., vol. 121, pp. 245–265, 1989.10.1007/BFb0041197Suche in Google Scholar
[27] L. Bouten and R. van Handel, “On the separation principle of quantum control,” in Quantum Stochastic and Information: Statistics, Filtering and Control, Singapore, World Scientic Publishing Co Pte Ltd, 2008.10.1142/9789812832962_0010Suche in Google Scholar
[28] L. Bouten, R. van Handel, and M. R. James, “An introduction to quantum leering,” SIAM J. Contr. Optim., vol. 46, p. 2199, 2007. https://doi.org/10.1137/060651239.Suche in Google Scholar
[29] J. Combes, J. Kerckhoff, and M. Sarovar, “The SLH framework for modeling quantum input-output networks,” Adv. Phys. X, vol. 2, no. 3, pp. 784–888, 2017. https://doi.org/10.1080/23746149.2017.1343097.Suche in Google Scholar
[30] J. W. S. Liu, Real-Time Systems, NJ, Prentice-Hall, 2000.Suche in Google Scholar
© 2021 the author(s), published by De Gruyter, Berlin/Boston
This work is licensed under the Creative Commons Attribution 4.0 International License.
Artikel in diesem Heft
- Frontmatter
- Original Research Articles
- Modeling and assessment of the flow and air pollutants dispersion during chemical reactions from power plant activities
- Stochastic dynamics of dielectric elastomer balloon with viscoelasticity under pressure disturbance
- Unsteady MHD natural convection flow of a nanofluid inside an inclined square cavity containing a heated circular obstacle
- Fractional-order generalized Legendre wavelets and their applications to fractional Riccati differential equations
- Battery discharging model on fractal time sets
- Adaptive neural network control of second-order underactuated systems with prescribed performance constraints
- Optimal control for dengue eradication program under the media awareness effect
- Shifted Legendre spectral collocation technique for solving stochastic Volterra–Fredholm integral equations
- Modeling and simulations of a Zika virus as a mosquito-borne transmitted disease with environmental fluctuations
- Mathematical analysis of the impact of vaccination and poor sanitation on the dynamics of poliomyelitis
- Anti-sway method for reducing vibrations on a tower crane structure
-
Stable soliton solutions to the time fractional evolution equations in mathematical physics via the new generalized
- Convergence analysis of online learning algorithm with two-stage step size
- An estimative (warning) model for recognition of pandemic nature of virus infections
- Interaction among a lump, periodic waves, and kink solutions to the KP-BBM equation
- Global exponential stability of periodic solution of delayed discontinuous Cohen–Grossberg neural networks and its applications
- An efficient class of fourth-order derivative-free method for multiple-roots
- Numerical modeling of thermal influence to pollutant dispersion and dynamics of particles motion with various sizes in idealized street canyon
- Construction of breather solutions and N-soliton for the higher order dimensional Caudrey–Dodd–Gibbon–Sawada–Kotera equation arising from wave patterns
- Delay-dependent robust stability analysis of uncertain fractional-order neutral systems with distributed delays and nonlinear perturbations subject to input saturation
- Construction of complexiton-type solutions using bilinear form of Hirota-type
- Inverse estimation of time-varying heat transfer coefficients for a hollow cylinder by using self-learning particle swarm optimization
- Infinite line of equilibriums in a novel fractional map with coexisting infinitely many attractors and initial offset boosting
- Lump solutions to a generalized nonlinear PDE with four fourth-order terms
- Quantum motion control for packaging machines
Artikel in diesem Heft
- Frontmatter
- Original Research Articles
- Modeling and assessment of the flow and air pollutants dispersion during chemical reactions from power plant activities
- Stochastic dynamics of dielectric elastomer balloon with viscoelasticity under pressure disturbance
- Unsteady MHD natural convection flow of a nanofluid inside an inclined square cavity containing a heated circular obstacle
- Fractional-order generalized Legendre wavelets and their applications to fractional Riccati differential equations
- Battery discharging model on fractal time sets
- Adaptive neural network control of second-order underactuated systems with prescribed performance constraints
- Optimal control for dengue eradication program under the media awareness effect
- Shifted Legendre spectral collocation technique for solving stochastic Volterra–Fredholm integral equations
- Modeling and simulations of a Zika virus as a mosquito-borne transmitted disease with environmental fluctuations
- Mathematical analysis of the impact of vaccination and poor sanitation on the dynamics of poliomyelitis
- Anti-sway method for reducing vibrations on a tower crane structure
-
Stable soliton solutions to the time fractional evolution equations in mathematical physics via the new generalized
- Convergence analysis of online learning algorithm with two-stage step size
- An estimative (warning) model for recognition of pandemic nature of virus infections
- Interaction among a lump, periodic waves, and kink solutions to the KP-BBM equation
- Global exponential stability of periodic solution of delayed discontinuous Cohen–Grossberg neural networks and its applications
- An efficient class of fourth-order derivative-free method for multiple-roots
- Numerical modeling of thermal influence to pollutant dispersion and dynamics of particles motion with various sizes in idealized street canyon
- Construction of breather solutions and N-soliton for the higher order dimensional Caudrey–Dodd–Gibbon–Sawada–Kotera equation arising from wave patterns
- Delay-dependent robust stability analysis of uncertain fractional-order neutral systems with distributed delays and nonlinear perturbations subject to input saturation
- Construction of complexiton-type solutions using bilinear form of Hirota-type
- Inverse estimation of time-varying heat transfer coefficients for a hollow cylinder by using self-learning particle swarm optimization
- Infinite line of equilibriums in a novel fractional map with coexisting infinitely many attractors and initial offset boosting
- Lump solutions to a generalized nonlinear PDE with four fourth-order terms
- Quantum motion control for packaging machines