Reconstruction of Tesla micro-valve using topological sensitivity analysis
-
M. Abdelwahed
 und
R. Malek
und
R. Malek

Abstract
In this paper, we deal with topology optimization attributed to the non stationary Navier-Stokes equations. We propose an approach where we analyze the sensitivity of a shape function relating to a perturbation of the flow domain. A numerical optimization algorithm based on topological gradient method is built and applied to the 2D Tesla micro valve reconstruction. Some numerical results confirm the efficiency of the proposed approach.
1 Introduction
Tesla valves are no-moving-part valves that utilize fluidic inertial forces to inhibit flow in the reverse direction. It was patented in 1920 by Nikola Tesla as a “Valvular conduit” [1] (see figure 1), and has since made the subject of various applications in micro-satellite [2], drug delivery [3], microbiology [4, 5] and hydrocephalus treatment in medicine [6, 7].
![Fig. 1
A rotated scanning electron microscope photograph of a Tesla valve by Forster et al. [8]](/document/doi/10.1515/anona-2020-0014/asset/graphic/j_anona-2020-0014_fig_001.jpg)
A rotated scanning electron microscope photograph of a Tesla valve by Forster et al. [8]
The Tesla micro-valve performance is evaluated by the diodicity parameter (represents the ratio of the pressure drop in backward and forward direction) which evaluates the ability of allowing forward flow while inhibiting the reverse one,
Different works have focused on the optimal shape of the tesla micro-valve. However, the majority of works concerns stationary Partial Differential Equations (PDE). Forster et al. [8] proved the possibility of using Tesla valves in micro-fluidics and determined experimentally the diodicity for Reynolds number (Re) ≃ 180. Truong et al. in [9] derived numerically the optimum geometry of Tesla valve for 100 < Re < 600 with better diodicity than [8]. Bardell et al [10] analyzed the mechanism of the diodicity and proposed a Tesla valve optimal design for low Re. In the case when Re = 100, they finished with Di = 1.4. Gamboa et al. [11] optimized the shape of Tesla valve for application with piezoactuated plenums. The obtained fluid domain related to Re = 100 is characterized by a diodicity number Di = 1.1. In 2008, Pingen et al. [12] used the Lattice Bolzmann Method for the optimization of a micro Tesla valve without any information on diodicity. The used objective function was the pressure drop between inlet and outlet. After that in 2010, Lin et al. [13] used a topology optimization technique based on the power dissipation energy [14] of forward flow as objective function and the diodicity was built into the model as a constraint. For Re = 100, they found a new design of Tesla valve given Di = 1.2. Next in 2015, Lin et al. [15] solved the Tesla valve topology optimization using the approach of material distribution with inverse diodicity as objective function and fluid volume fraction as the constraint.
Until recently, there were no investigations dealing with the non-stationary case. We propose in this paper a new reconstruction method using the sensitivity analysis approach [16, 17, 18, 19] for a non stationary flow.
The principal results of this work concern both theoretical and numerical aspects associated with the Tesla micro-valve problem. The theoretical part is related to the analysis of the topological sensitivity for the non stationary Navier-Stokes equations. The numerical part concerns the 2D optimization of the Tesla micro-valve shape. The optimal shape is constructed by inserting obstacles in the considered initial domain. We build a simple and fast numerical reconstruction algorithm based on the topological gradient technique. The efficiency of the presented approach is confirmed by some numerical tests.
The paper is presented as following: Firstly we formulate the problem in section 2. Section 3 concerns the theoretical aspects. The numerical aspects are given in section 4. Finally section 5 includes Theorems proofs.
2 Problem formulation
Let Ω ⊂ ℝd, d = 2, 3 a bounded domain with regular boundary Γ = ∂Ω. We consider the blood as an incompressible viscous fluid flow described by the non stationary Navier-Stokes equations [20]. The velocity w and the pressure p satisfy the following system:
where ν is the kinematic viscosity coefficient, G is the gravitational force, T is the computational time and wd is a given Dirichlet boundary data. Because of the divergence free condition on w, wd must necessarily satisfy the compatibility condition,
where n is the unit outward normal vector along Γ.
Remark 2.1
Problem (1) has at least one solution (see [21](Ch.II, eq.(1.89)). If |w|1,Ω < ν/k, with
The topological sensitivity method idea is to study the variation of a given shape function j relating to a perturbation in the fluid flow domain geometry.
In structural shape optimization case (respectively electromagnetism and fluid dynamics cases) a geometry perturbation means removing some material (respectively the insertion of an obstacle).
Let 𝓞z,ε = z + ε𝓞, a small obstacle inserted in Ω characterized by its center z, its size ε and its shape 𝓞. 𝓞 is a bounded domain of ℝd containing the origin and ∂𝓞 (its boundary) is connected and piecewise 𝓒1.
The shape function variation is written
where
ε ↦ ρ(ε), a positive scalar function going to zero with ε
z ↦ δj(z), called the topological gradient, describes the shape function variation when an obstacle is inserted in z. It plays the role of descent direction in the algorithm of optimization.
To our knowledge, the majority of works leading with topological sensitivity method concern the stationary case such as Stokes problem [16, 18], quasi-Stokes [19], stationary Navier Stokes problem [17]. We extend this method to the nonlinear unsteady Navier Stokes flow. To overcome the difficulty due to the non linear operator and its associated adjoint problem we extend the perturbed velocity by zero in the inclusion which permits to use the adjoint method in the whole domain. For the time dependent term we will use the fundamental solution of the non stationary Stokes operator and decompose the velocity variation.
We define the time dependent shape function as:
where Jε in H1(Ω ∖ 𝓞z,ε)d and wε is solution to
with Ωz,ε = Ω ∖ 𝓞z,ε is the perturbed domain. Note that if ε = 0 (without obstacle), (w0, p0) verify (1) and Ω0 = Ω.
In the following, we will derive a general mathematical analysis for Jε satisfying the following assumption:
Assumption (𝓐)
∀ε ≥ 0, t ↦ Jε(wε(., t)) ∈ L1(0, T).
J0 is differentiable in H1(Ω) and we denote DJ0(w) its derivative.
∃ρ : ℝ+ ⟶ ℝ+ and δ𝓙 ∈ ℝ such that ∀ε ≥ 0
3 Main results
We deal in this section with the non stationary Navier-Stokes topological sensitivity relating to the domain perturbation. We consider the shape functions verifying the assumption (𝓐).
3.1 Asymptotic behavior of the velocity variation
We first study the influence on the velocity vε = wε – w0 of inserting a small obstacle Oz,ε in Ω. From (1) and (3), it is straightforward to show that (vε, pvε) satisfy the system
We will distinguish in the following the 2D and 3D cases.
3.1.1 Three dimensional case
Theorem 3.1
There exists c > 0 independent of ε, such that
where W = (W1, W2, W3) ∈ H1(Ωz,ε)3 is defined by
with Uj is solution of (exterior Stokes problem)
with {ej}j=1,2,3 is the ℝ3 canonical basis.
We show by using a single layer potential (see [22]) that
where
with r = ∥y∥, er =
Using Theorem 3.1 we obtain the following corollary.
Corollary 3.2
We have
3.1.2 Two dimensional case
Theorem 3.3
There exists c > 0 independent on ε, verifying
where
with Ej(y) = E(y)ej, 1 ≤ j ≤ 2, {ej}j=1,2 is the ℝ2 canonical basis and
represents the fundamental solution of the Stokes System in ℝ2 with r = ∥y∥ and er =
Using Theorem 3.3 it follows the velocity estimation in the perturbed fluid flow domain.
Corollary 3.4
We have
3.2 Asymptotic behavior of the shape function
The topological sensitivity analysis for the non stationary Navier-Stokes operator in three and two dimensional cases is given in this section. The presented results are satisfied by all shape functions j defined by (2) and Jε verifies the Assumption (𝓐).
3.2.1 Three dimensional case
Theorem 3.5
If Jε satisfies the Assumption (𝓐) with ρ(ε) = ε, then j defined by (2) verifies
where
the matrix 𝓜𝓞 is given by
u0 is the solution to the adjoint problem
Corollary 3.6
If 𝓞 = B(0, 1) (the unit ball), ηj(y) =
3.2.2 Two dimensional case
Theorem 3.7
If Jε satisfies the Assumption (𝓐) then j defined by (2) verifies
where u0 is the adjoint state solution to the problem (9).
The proofs of Theorems 3.1, 3.3, 3.5 and 3.7 are relegated to section 5. The variation δ𝓙 depends on the shape functions expressions. Some useful examples in numerical applications will be presented in section 3.3.
3.3 Shape function examples
3.3.1 First example
We define the shape function
where 𝓦d ∈ L1(0, T; H1(Ω)) is a datum representing a desired fluid flow state.
This example concerns the L2-norm shape function that has been used in geometric control problems like the optimization of location of some obstacle in a tank to approximate an object flow 𝓦d (see [16]).
Proposition 3.8
The function
satisfies the assumption (𝓐) with
3.3.2 Second example
We define the shape function which corresponds to the dissipation energy minimization
where 𝓦d ∈ L1(0, T; H2(Ω)) is a given datum. It was used in several optimization problems such as minimum drag problem [23], pipe bend design [10?], cavity example [24], reconstruction of Tesla valve [13].
Proposition 3.9
The function
satisfies the assumption (𝓐) with
4 Numerical results
In this section, we deal with some numerical applications to validate the obtained theoretical results given in section 3.
4.1 Validation of the asymptotic expansion
To establish the numerical validation of Theorem 3.7, we consider the variation relating to ε of
where
We expect to prove numerically that Δz(ε) satisfies the previously derived theoretical estimate Δz(ε) =
To this aim, we consider the following data:
Ω = ]0, 1[×]0, 1[ is a square domain.
The locations
Table 1Location of obstacles
obstacle location zi z1 = (0.2, 0.8) z2 = (0.8, 0.2) z3 = (0.5, 0.5) z4 = (0.7, 0.7) The shape function j is defined by the semi-norm
where 𝓦d is a given velocity state.
In this case, the function Δzi(ε) is defined by (see Theorem 3.7 and Proposition 3.9):
The validation algorithm uses the following steps:
The validation algorithm:
Step 1:
compute the solution w0 and the associated adjoint state u0 in the domain Ω.
determine j(Ω) defined by (11).
Step 2: For each obstacle
determine the variation δj(zi) given in (10),
choose
compute an approximation of the function
Step 3: Deduce numerically the function
For each considered obstacle
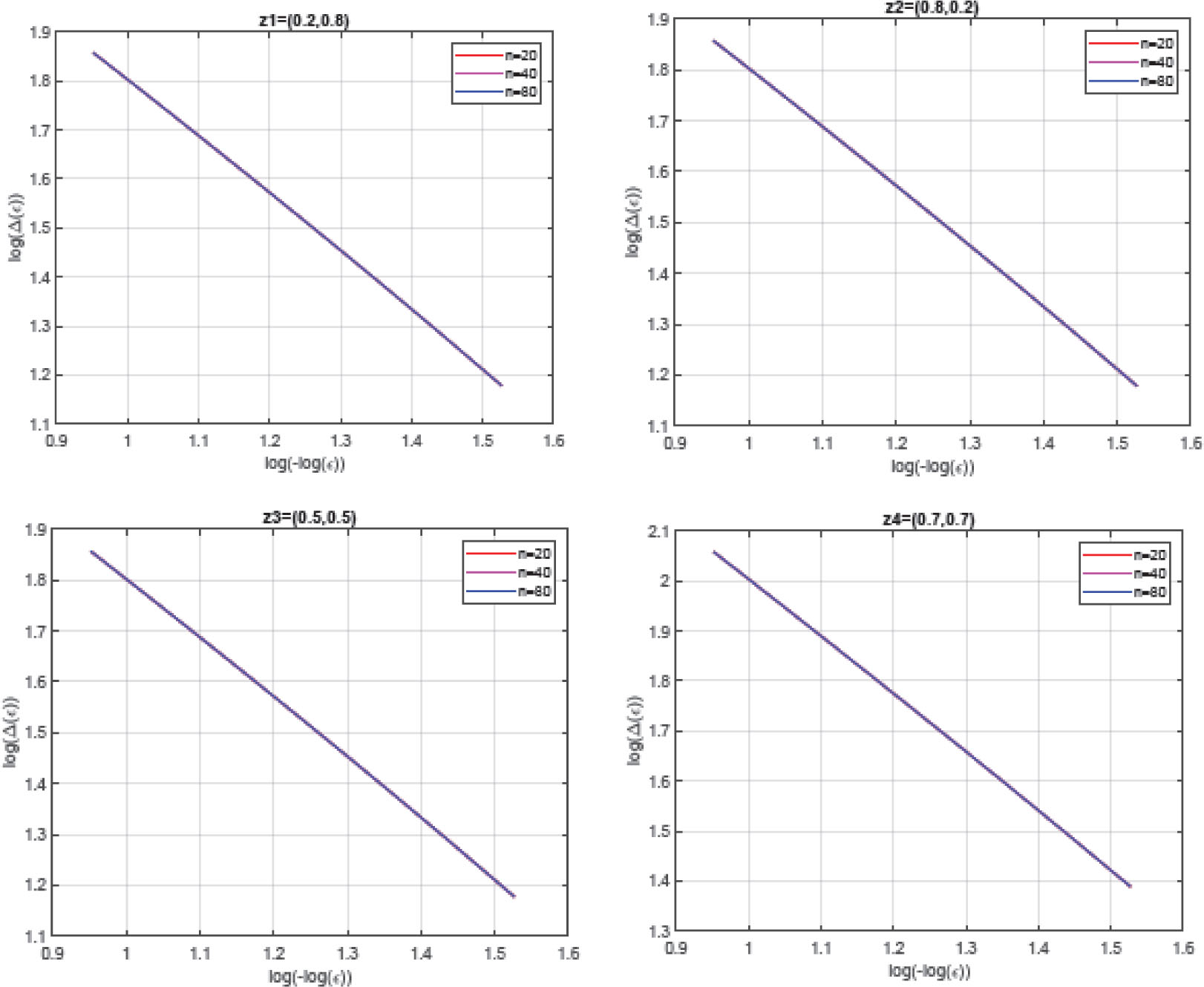
Variation of log(|Δzi(ε)|) relating to log(–log(ε)).
We define βi to describe the behavior of ε ↦ Δzi(ε) relating to –log(ε), i.e.
It corresponds to the slope of the line approximating the variation ε ↦ log(|Δzi(ε)|) relating to log(–log (ε)) for each obstacle
From the plotted curves in Figure 2, one deduce the slopes βi, i = 1, …, 4 in table 2.
The obtained slopes βi of the lines associated with the obstacles
| The considered obstacles |
||||
|---|---|---|---|---|
| The obtained slopes βi | –1.18 | –1.187 | –1.217 | –1.163 |
We deduce that the numerical results confirm the behavior predicted by the theoretical estimate
4.2 The Tesla micro-valve application
The hydrocephalus treatment is a very important application in medicine. The problem is to optimize numerically the design of the 2D Tesla micro-valve at Re = 100. To solve this problem we consider the objective function as the forward energy dissipation and the diodicity as a constraint. The optimal domain is constructed through the insertion of some obstacles in the initial one. The problem leads to optimize the location of obstacles.
4.2.1 Shape optimization problem
We define Ω as the pentagon [15] having one inclined inlet Γin and one horizontal outlet Γout (see Figure 3).
Considered pentagon design domain
The aim is to find the fluid flow optimal domain Ω∗ which minimizes the dissipated energy by the forward fluid flow and reproducing the original Tesla valve design given in Figure 1. This can be formulated:
where
with |.| and Vdesired represents respectively the Lebesgue measure and the target volume.
We recall that the performance of the Tesla valve is measured by diodicity Di which is known as the ratio of the pressure drop in backward direction to that in forward direction, which is equivalent to the ratio of dissipation of reverse and forward flows [15]:
with (wf, pf) and (wr, pr) are respectively the solution to the Navier Stokes system in the forward and the reverse flows. Then, diodicity can be maximized by minimizing forward dissipation while maximizing reverse dissipation. That is why our optimization problem is defined with the diodicity Di as a constraint; Di > 1.
Using the above definitions, the optimization problem [15] for reconstructing Tesla valve can be expressed as
Objective: power dissipation of forward flow
Constraints
Volume fraction |Vdesired| < 0.8 |V0|.
Diodicity Di ≥ c > 1.
Navier Stokes equations for forward and backward directions.
We use the obtained theoretical results in 3.2.2 to solve (12).
4.2.2 The topology optimization process
To obtain the optimal domain, an iterative process is applied to construct a sequence of geometries (Ωk)k≥0 with Ω0 = Ω and Ωk+1 = Ωk ∖ 𝓞k where 𝓞k is an obstacle inserted in Ωk. To define the obstacle location and size, we find the function δjk defined by (see Theorem 3.7)
where
wk represents the velocity, solution to the Navier-Stokes problem in Ωk
uk is the adjoint state, solution to
where
The Algorithm:
Initialization: Set Ω0 = Ω, and k = 0
Repeat until |Ωk| ≤ Vdesired:
The obstacle to be inserted:
determine
set
The new domain:
set Ωk+1 = Ωk ∖ 𝓞k,
k ⟵ k + 1 and go to (2).
The stopping criteria is defined by the natural optimality condition
This algorithm is like a descent method where δjk represents the descent direction and |𝓞k| = |Ωk ∖ Ωk+1| the step length. The parameter
The numerical discretization of problems (14) and (15) is done by P1-bubble/P1 finite element method [25]. The computation of the approximated solutions is achieved by the Uzawa’s algorithm. The function δjk is computed piecewise constant over elements.
Next, we will apply the proposed algorithm to reconstruct Tesla micro valve.
4.2.3 Reproducing the Tesla micro valve
We illustrate in this section the strengths of topology optimization method, namely the ability to find optimal design using only information on boundary conditions and constraints without the need of initial design.
The considered design domain is the pentagon domain (see Figure 3). This problem example has already been studied by S. Lin and al. in [15] in the steady state regime using projection method.
For the forward direction, the inlet boundary velocity has a parabolic behavior (Re = 100 relating to the inlet dimension). At the outlet boundary, the pressure is taken constant and no-slip condition is considered on the walls. For the backward flow direction, we reverse these boundary conditions. Besides, we prescribe solid regions close to the inlets/outlets to minimize the boundary effect on the final design solution.
We illustrate the geometries obtained during the optimization process in Figure 4. The optimal domain is obtained after four iterations. It is nearly identical to literature [1, 15] (see Figure 5).
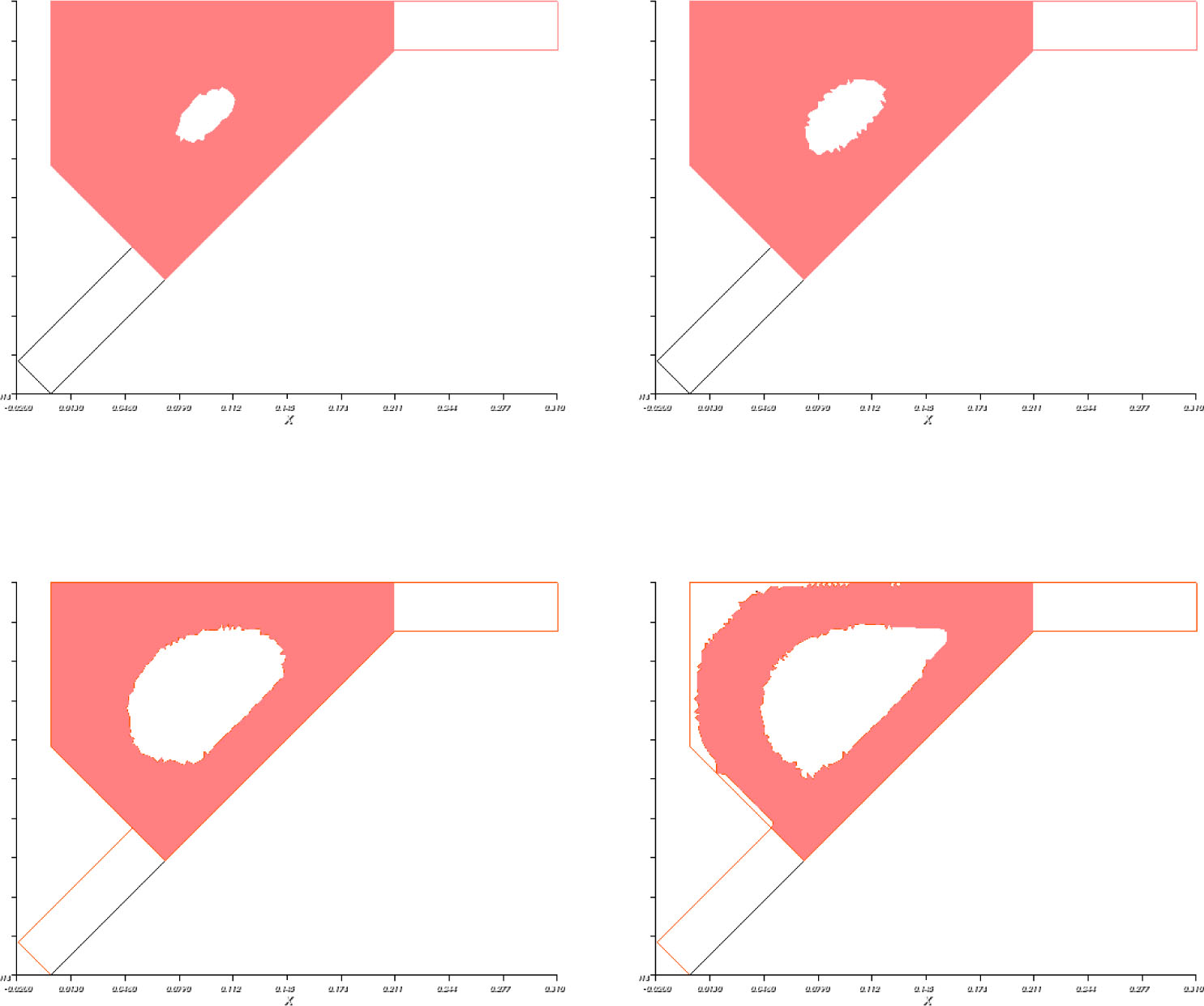
Geometries obtained during the optimization process
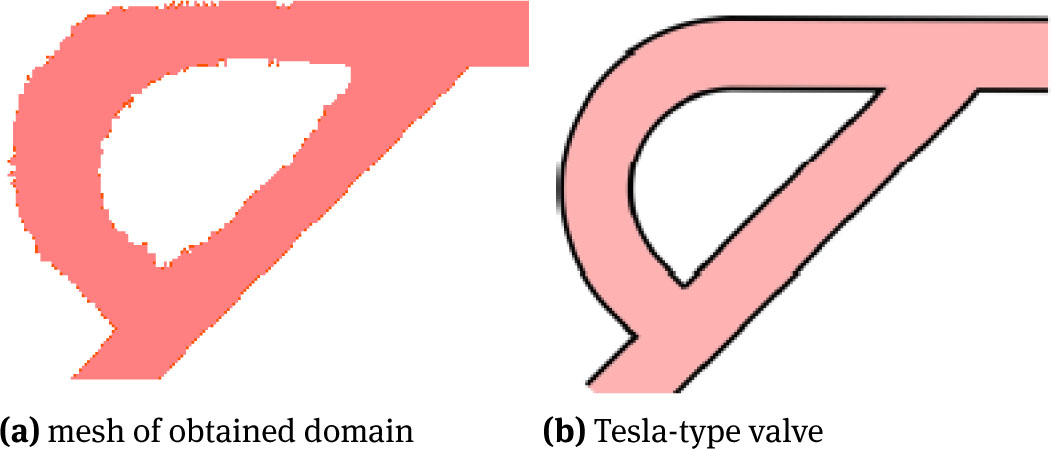
mesh of obtained design (left) and reference Tesla valve (right)
4.2.4 Discussion
In the previous Figure, thanks to the topological gradient, we deduce an easy reconstruction of tesla valve. Now, we normalize the obtained tesla valve behavior by plotting the obtained forward and reverse flows respectively in figures 6(a) and 6(b). It is clear that the velocity field is strongly different for the two cases.
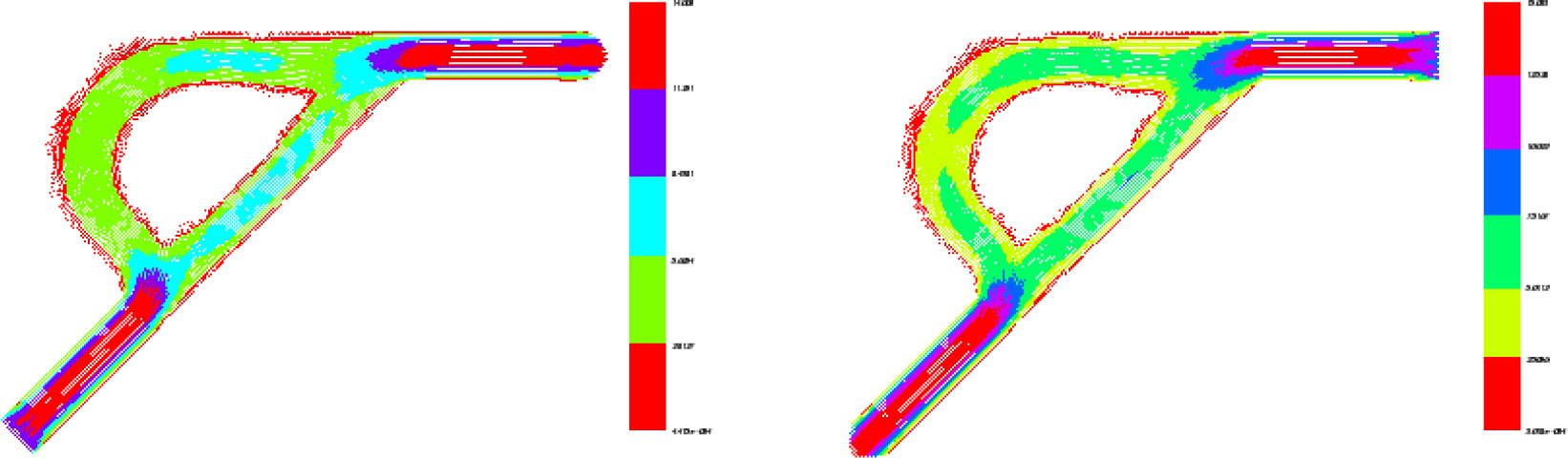
Forward and backward flow velocity field
To study the obtained tesla valve performance, we calculate the diodicity. Using the energy view point expression of diodicity, the experimentally derived value is 1.137. In bibliography [26], the diodicity is well predicted using
with N is the number of tesla valves and Re is the Reynolds number. Based on this expression, we found Di ≅ 1.1316 which ensures an agreement between the obtained diodicity and the experimental one.
5 Mathematical analysis
This section deals with the proofs of Theorems 3.1, 3.3, 3.5 and 3.7.
5.1 Proof of Theorem 3.1
Let Q be the pressure associated with the velocity W:
where Pj is the pressure associated with the velocity Uj solution to (6). Setting the variation
From (4) and (6), we can verify that (zε, pzε) is solution to
The last boundary condition follows due to the fact that Uj = –ej on ∂𝓞.
Moreover, since |w0|L2(0,T;H1(Ω)) < ν/k, then ε sufficiently small,
Let R > 0 such that 𝓞z,ε ⊂ B(z, R) and B(z, R) ⊂ Ω. Using the trace theorem, we obtain
where ΩR = Ω ∖ B(z, R).
Using (5) and the variable change x = z + εy, we obtain
By the same way, we have
Using [19] (see also [27]), the velocity field Uj, solution to the exterior Stokes problem, satisfies the estimate
Then, using the smoothness of w0 and the previous estimates, one can deduce
For the third term in (19). Expanding w0(x, t) = w0(z, t) + ε ∇ w0(ξy, t)y with ξy ∈ 𝓞z,ε and using the fact that ∇ w0 is uniformly bounded, it follows that
We now examine the last term in (19). Since w0 ∈ L∞(Ω),
according to Lemma 4.2 in [17].
In addition, by Lemma 4.5 in [17], the variable change and the continuity of w0, we can deduce
and then
Finally, combining (20), (21) and (23) we deduce that
5.2 Proof of Theorem 3.3
Let Q be the pressure associated with the velocity W:
where Πj is the pressure associated with the velocity Ej.
Setting
From (1) and (3), we obtain that (zε, sε) is solution to
Using the relation
Then, by an energy inequality [28], it follows
We estimate in the following each term in (26) separately.
We remark that:
Since 𝓞 is an open domain containing the origin, ∃r > 0 such that B(0, r) ⊂ 𝓞.
Ω is a bounded domain in such a way that ∃R > 0 such that Ω ⊂ B(z, R), ∀z ∈ Ω.
We have Ωz,ε – z = {x – z, x ∈ Ωz,ε} ⊂ C(0, rε, R) = {y ∈ ℝ2; rε < |y| < R}.
From the fact that C(0, rε, R) ⊂ ℝ2 ∖ {0}, it follows that the function ψ : y ↦ log(|y|) is smooth in C(0, rε, R) and we have ∥ψ∥0,C(0,rε,R) ≤ c. Then, using the cylindrical coordinate system, one can prove that ∃c > 0, independent of ε, such that
Estimate of the first term in (26): Using that w0 ∈ H1(0, T; H1(Ω)), we obtain
Estimate of the last term of (26):
Since w0 and ∇ w0 belong to L∞(Ω), we have
Using the definition of W, we can deduce the following estimates
Yet, we have
Estimate of boundary condition imposed on Γ:
Let R͠ > 0 such that 𝓞z,ε ⊂ B(z, R͠) and B(z, R͠) ⊂ Ω. Since z ∉ ΩR͠ = Ω ∖ B(z, R͠), the function x ↦ E(x – z) belongs to 𝓒1(ΩR͠). By the trace theorem, we have
Therefore, ∥W∥L2(0,T;H1/2(Γ) is uniformly bounded with respect to ε.
Estimate of boundary condition imposed on ∂𝓞z,ε:
Using the theorem of trace and the smoothness of w0 in 𝓞z,ε×]0, T[, one can obtain
Then, the first boundary term on ∂𝓞z,ε satisfies
To estimate the last boundary term, we use that 𝓞 contains the origin.
Setting 𝓞r = 𝓞∖B(0, r) and 𝓞r, ε = z + ε𝓞r. Using the theorem of trace and the variable change x = z + εy, we obtain
From the fact that y ↦ E(y) is sufficiently smooth in 𝓞r ⊂ ℝ2 ∖ {0}, the last quantity is uniformly bounded and then
Finally, combining the above estimates, we obtain, ∃c > 0, independent of ε, such as
which ends the proof of Theorem 3.3.
5.3 Asymptotic analysis
This section deals with the proofs of the Theorems presented in paragraphs 3.2 and 3.3. Using the assumption (𝓐),
where wε is extended by zero inside the domain 𝓞z,ε.
Using Green formula and that wε = 0 in 𝓞ε, it follows
where u0 is the solution to the associated adjoint problem.
From (4) and the fact that w0 = 0 on Γ×]0, T[, we obtain
Therefore,
We begin by giving the estimate of the first three terms in (33).
Lemma 5.1
The integral terms in (33) satisfy the estimate
Proof
Using the variable change x = z + εy, the first integral term in (33) can be written
where |𝓞| denotes the Lebesgue measure of 𝓞.
Using that w0 and u0 are smooth near z, one can deduce that
By the same arguments, we can estimate the two other terms in (33).
The shape function variation can be rewritten
We are now ready to prove the established results in Theorems 3.5 and 3.7 and propositions 3.8 and 3.9.
5.3.1 Proof of Theorem 3.5
Using an integration by parts and the fact that div(vε) = 0 yield
Then, the shape function variation can be written
From the definition of (zε, sε) and the variable change x = z + εy, we have
where σ(U, P)n is the 3 × 3 matrix defined by
By the trace theorem, Theorem 3.1 and that u0 is smooth in 𝓞z,ε,
Making the variable change x = z + εy, expanding u0(z + εy, t) = u0(z, t) + ε ∇ u0(ξy, t)y with ξy ∈ 𝓞z,ε and using that ∇u0 is uniformly bounded, we obtain
Due to the jump condition of the single layer potential σ(Uj, Pj)n = –ηj + σ(Vj, Sj)n, where (Vj, Sj) is the solution to the interior problem
By the fact that div σ(Vj, Sj) = νΔVj – ∇ Sj = 0 in 𝓞, we have
Then, we obtain
Consequently, the shape function j admits the asymptotic expansion
where 𝓜𝓞 is the matrix given by
5.3.2 Proof of Theorem 3.7
The shape function variation is given by
Recall that the term (W, Q) describing the perturbation due to the presence of a small obstacle 𝓞z,ε is given by: ∀(x, t) ∈ Ωz,ε×]0, T[,
where Ej(y) = E(y)ej and Πj(y) = Π(y).ej, 1 ≤ j ≤ 2.
Applying an integration by parts and using the fact that div(vε) = 0 provides
Then,
It follows that
Then, from the decomposition (24), one can derive
where σ(E, Π)n is the 2 × 2 matrix defined by (σ(E, Π)n)i,j = (σ(Ej, Πj)n)i, 1 ≤ i, j ≤ 2.
Using Theorem 3.3 and the smoothness of u0 in 𝓞z,ε, it follows
The second term in (36) can be written
Using the trace theorem and the variable change x = z + εy, one can obtain
By the fact that u0 is smooth in 𝓞z,ε, it follows
Recall that B(0, r) ⊂ 𝓞, 𝓞r = 𝓞 ∖ B(0, r) and 𝓞r,ε = z + ε𝓞r ⊂ 𝓞z,ε. Here, one can check that the function x ↦ σ(E, Π)(x–z) is smooth in 𝓞r,ε. Using the trace theorem, we prove that the quantity ∥σ(E, Π)(x – z)n∥H–1/2(∂𝓞z,ε) is bounded with respect to ε, which implies
Combining the above estimates, one can deduce
Since div (σ(Ej, Πj)(x – z)) = δzej in 𝓞z,ε, it follows
where I is the 2 × 2 identity matrix.
Then, the last estimate becomes
Consequently, all shape functions j satisfying the assumption (𝓐) admit the asymptotic expansion
5.3.3 Proof of Proposition 3.8
Since the desired fluid flow state 𝓦d ∈ L2(0, T; H1(Ω)), the function J0 is differentiable at w0(., t) and we have
The variation of the associated shape function j is given by
Using the smoothness of w0 and 𝓦d in Ω, one can conclude that
For the two-dimensional case: Using the decomposition (24), it follows
From Theorem 3.3, one can check
Making use of (27), one can deduce
Then, it follows
For the three-dimensional case: Using the decomposition (17), it follows
Using Theorem 3.1 and the change of variable, one can check
Therefore the function Jε satisfies the assumption (𝓐) with
5.3.4 Proof of Proposition 3.9
The function J0 is differentiable at w0(., t) and we have
The variation of the associated shape function j is given by
Thanks to the regularity of w0 and 𝓦d in 𝓞z,ε, one can derive
For the two-dimensional case: By an adaptation of the technique used in the proof of Theorem 3.7, one can derive
Therefore, the function Jε satisfies the assumption (𝓐) with
For the three-dimensional case: By an adaptation of the technique used in the proof of Theorem 3.5, one can derive
Therefore, the function Jε satisfies the assumption (𝓐) with
6 Conclusion
This paper deals with non-stationary Navier-Stokes topological optimization problem. In the theoretical part of this work, we have established a topological asymptotic formula describing the shape function variation related to a small Dirichlet geometric perturbation.
The obtained theoretical results are exploited for building a topological optimization algorithm for solving the Tesla micro-valve optimization problem. We illustrate the strengths of this approach namely the ability to find optimal design based only on boundary conditions and constraints information without the need of an initial design.
Acknowledgement
The authors acknowledge funding from the Research and Development (R&D) Program (Research Pooling Initiative), Ministry of Education, Riyadh, Saudi Arabia, (RPI-KSU). We are very grateful to Professor Maatoug Hassine for the interesting discussions that have improved the quality of this document.
References
[1] N. Tesla, Valvular Conduit, U.S. Patent NO. 1.329.559, 1920.Suche in Google Scholar
[2] C.J. FG Morris, Electronic cooling systems based on fixed-valve micropump networks, Transducers Research Foundation, Cleveland Heights, Ohio, 2000.Suche in Google Scholar
[3] M. Wackerle, H.J. Bigus and T.V. Blumenthal, Micro pumps for lab technology and medicine, Final presentation of the project Ì-DOS, Fraunhofer IZM, Munich, 2006.Suche in Google Scholar
[4] S. Shoji and M. Esashi, Microflow devices and systems, Journal of Micromechanics and Microengineering 4 (1994), 157-171.10.1088/0960-1317/4/4/001Suche in Google Scholar
[5] G.T.A. Kovacs, Micromachined transducers sourcebook, New York, Mc Graw-Hill, 839-855, 1998.Suche in Google Scholar
[6] E. Morganti and G.U. Pignatel, Microfluidics for the treatment of the hydrocephalus, 1st International Conference on Sensing Technology, Palmerston North, New Zealand (2005), 483-487.Suche in Google Scholar
[7] H.J Yoon, J.M. Jung, J.S. Jeong and S.S. Yang, Micro devices for a cerebrospinal fluid (CSF) shunt system, Sensors and Actuators 110, (2004), 68-76.10.1016/j.sna.2003.10.047Suche in Google Scholar
[8] F. K. Forster, R. L. Bardell, M. A. Afromowitz, N.R. Sharma and A. Blanchard, Design, Fabrication and Testing of Fixed-Valve Micro-Pumps, The ASME Fluid Engineering Division 234, (1995), 39-44.Suche in Google Scholar
[9] T.Q. Truong and N.T. Nguyen, Simulation and Optimization of Tesla Valves, 2003 Nanotech - Nanotechnology Conference and Trade Show, San Francisco, CA (2003), 178-181.Suche in Google Scholar
[10] R. L. Bardell, The Diodicity Mechanism of Tesla-Type No-Moving-Parts Valves, Ph.D. thesis, University of Washington, Seattle, 2000.Suche in Google Scholar
[11] A. R. Gamboa, C. J. Morris and F. K. Forster, Improvements in Fixed-Valve Micropump Performance Through Shape Optimization of Valves, ASME J. Fluids Eng. 127 (2005), no. 2, 339-347.10.1115/1.1891151Suche in Google Scholar
[12] G. Pingen, A. Evgrafov and K. Maute, A Parallel Schur Complement Solver for the Solution of the Adjoint Steady-State Lattice Boltzmann Equations: Application to Design Optimisation, Int. J. Comput. Fluid Dyn. 22 (2008), no. 7, 457-464.10.1080/10618560802238267Suche in Google Scholar
[13] S. Lin, Y. Deng, Y. Wu and Z. Liu, Optimizing Tesla valve for inertial microfluidics, The third international conference of advances in microfluidics and nanofluidics, Dalian, China, 2012.Suche in Google Scholar
[14] T. Borrvall and J. Petersson, Topology optimization of fuids in stokes flow, Int. J. Numer. Meth. Fluids 41 (2003), 77-107.10.1002/fld.426Suche in Google Scholar
[15] S. Lin, L. Zhao, J. K. Guest, T. P. Weihs and Z. Liu, Topology Optimization of Fixed-Geometry Fluid Diodes, ASME Journal of Mechanical Design 137 (2015), no 8, 081402.10.1115/1.4030297Suche in Google Scholar
[16] M. Abdelwahed and M. Hassine, Topological optimization method for a geometric control problem in Stokes flow, Appl. Numer. Math. 59 (2009), 1823-1838.10.1016/j.apnum.2009.01.008Suche in Google Scholar
[17] S. Amstutz, The topological asymptotic for the Navier-Stokes equations, ESAIM, Control, Optim. and Cal. of Variat. 11 (2005), 401-425.10.1051/cocv:2005012Suche in Google Scholar
[18] M. Hassine, Shape optimization for the Stokes equations using topological sensitivity analysis, ARIMA 5 (2006), 216-229.Suche in Google Scholar
[19] M. Hassine and M. Masmoudi, The topological asymptotic expansion for the quasi-Stokes problem, ESAIM. Control, Optimisation and Calculus of Variations 10 (2004), no. 4, 478-504.10.1051/cocv:2004016Suche in Google Scholar
[20] R. L. Panton, Incompressible Flow, John Wiley and Sons, New York, NY, USA, 1984.Suche in Google Scholar
[21] R. Temam, Navier-Stokes equations. AMS Chelsea Publishing, Providence, RI, Theory and numerical analysis, Reprint of the 1984 edition, 2001.10.1090/chel/343Suche in Google Scholar
[22] R. Dautray and J.L. Lions, Analyse mathématique et calcul numérique pour les sciences et les techniques, Masson, collection CEA 6,1987.Suche in Google Scholar
[23] X. Duan, Y. Ma, R. Zhang, Shape-topology optimization for Navier-Stokes problem using variational level set method, J. Comput. Appl. Math. 222 (2008), 487-499.10.1016/j.cam.2007.11.016Suche in Google Scholar
[24] M. Abdelwahed and M. Hassine, Topology Optimization of Time Dependent Viscous Incompressible Flows, Abstract and Applied Analysis (2014), Article ID 923016.10.1155/2014/923016Suche in Google Scholar
[25] O. Pironneau, On optimum profiles in Stokes flow, J. Fluid Mech. 59 (1973), no. 1, 117-128.10.1017/S002211207300145XSuche in Google Scholar
[26] S.M. Thompson, B. J. Paudel, T. Jamal and D. K. Walters, Numerical Investigation of Multistaged Tesla Valves, Journal of Fluids Engineering 136 (2014), no. 8, 081102.10.1115/1.4026620Suche in Google Scholar
[27] P. Guillaume and K. Sidi Idris, Topological sensitivity and shape optimization for the Stokes equations, SIAM Journal on Control and Optimization 43 (2004), no. 1, 1-31.10.1137/S0363012902411210Suche in Google Scholar
[28] G. Allaire and M. Schoenauer, Conception optimale de structures, Mathématiques et Applications, volume 58, Springer, 2007.Suche in Google Scholar
© 2020 M. Abdelwahed et al., published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 Public License.
Artikel in diesem Heft
- Frontmatter
- On the moving plane method for boundary blow-up solutions to semilinear elliptic equations
- Regularity of solutions of the parabolic normalized p-Laplace equation
- Cahn–Hilliard equation on the boundary with bulk condition of Allen–Cahn type
- Blow-up solutions for fully nonlinear equations: Existence, asymptotic estimates and uniqueness
- Radon measure-valued solutions of first order scalar conservation laws
- Ground state solutions for a semilinear elliptic problem with critical-subcritical growth
- Generalized solutions of variational problems and applications
- Existence and non-existence results for Kirchhoff-type problems with convolution nonlinearity
- Nonlinear Sherman-type inequalities
- Global regularity for systems with p-structure depending on the symmetric gradient
- Homogenization of a net of periodic critically scaled boundary obstacles related to reverse osmosis “nano-composite” membranes
- Noncoercive resonant (p,2)-equations with concave terms
- Evolutionary quasi-variational and variational inequalities with constraints on the derivatives
- Sharp estimates on the first Dirichlet eigenvalue of nonlinear elliptic operators via maximum principle
- Localization and multiplicity in the homogenization of nonlinear problems
- Remarks on a nonlinear nonlocal operator in Orlicz spaces
- A Picone identity for variable exponent operators and applications
- On the weakly degenerate Allen-Cahn equation
- Continuity results for parametric nonlinear singular Dirichlet problems
- Construction of type I blowup solutions for a higher order semilinear parabolic equation
- Singularly perturbed Choquard equations with nonlinearity satisfying Berestycki-Lions assumptions
- Comparison results for nonlinear divergence structure elliptic PDE’s
- Constant sign and nodal solutions for parametric (p, 2)-equations
- Monotonicity formulas for coupled elliptic gradient systems with applications
- Berestycki-Lions conditions on ground state solutions for a Nonlinear Schrödinger equation with variable potentials
- A class of semipositone p-Laplacian problems with a critical growth reaction term
- The role of superlinear damping in the construction of solutions to drift-diffusion problems with initial data in L1
- Reconstruction of Tesla micro-valve using topological sensitivity analysis
- Lewy-Stampacchia’s inequality for a pseudomonotone parabolic problem
- Global well-posedness of nonlinear wave equation with weak and strong damping terms and logarithmic source term
- Regularity Criteria for Navier-Stokes Equations with Slip Boundary Conditions on Non-flat Boundaries via Two Velocity Components
- Homoclinics for singular strong force Lagrangian systems
- A constructive method for convex solutions of a class of nonlinear Black-Scholes equations
- On a class of nonlocal nonlinear Schrödinger equations with potential well
- Superlinear Schrödinger–Kirchhoff type problems involving the fractional p–Laplacian and critical exponent
- Regularity for minimizers for functionals of double phase with variable exponents
- Boundary blow-up solutions to the Monge-Ampère equation: Sharp conditions and asymptotic behavior
- Homogenisation with error estimates of attractors for damped semi-linear anisotropic wave equations
- A-priori bounds for quasilinear problems in critical dimension
- Critical growth elliptic problems involving Hardy-Littlewood-Sobolev critical exponent in non-contractible domains
- On the Sobolev space of functions with derivative of logarithmic order
- On a logarithmic Hartree equation
- Critical elliptic systems involving multiple strongly–coupled Hardy–type terms
- Sharp conditions of global existence for nonlinear Schrödinger equation with a harmonic potential
- Existence for (p, q) critical systems in the Heisenberg group
- Periodic traveling fronts for partially degenerate reaction-diffusion systems with bistable and time-periodic nonlinearity
- Some hemivariational inequalities in the Euclidean space
- Existence of standing waves for quasi-linear Schrödinger equations on Tn
- Periodic solutions for second order differential equations with indefinite singularities
- On the Hölder continuity for a class of vectorial problems
- Bifurcations of nontrivial solutions of a cubic Helmholtz system
- On the exact multiplicity of stable ground states of non-Lipschitz semilinear elliptic equations for some classes of starshaped sets
- Sign-changing multi-bump solutions for the Chern-Simons-Schrödinger equations in ℝ2
- Positive solutions for diffusive Logistic equation with refuge
- Null controllability for a degenerate population model in divergence form via Carleman estimates
- Eigenvalues for a class of singular problems involving p(x)-Biharmonic operator and q(x)-Hardy potential
- On the convergence analysis of a time dependent elliptic equation with discontinuous coefficients
- Multiplicity and concentration results for magnetic relativistic Schrödinger equations
- Solvability of an infinite system of nonlinear integral equations of Volterra-Hammerstein type
- The superposition operator in the space of functions continuous and converging at infinity on the real half-axis
- Estimates by gap potentials of free homotopy decompositions of critical Sobolev maps
- Pseudo almost periodic solutions for a class of differential equation with delays depending on state
- Normalized multi-bump solutions for saturable Schrödinger equations
- Some inequalities and superposition operator in the space of regulated functions
- Area Integral Characterization of Hardy space H1L related to Degenerate Schrödinger Operators
- Bifurcation of time-periodic solutions for the incompressible flow of nematic liquid crystals in three dimension
- Morrey estimates for a class of elliptic equations with drift term
- A singularity as a break point for the multiplicity of solutions to quasilinear elliptic problems
- Global and non global solutions for a class of coupled parabolic systems
- On the analysis of a geometrically selective turbulence model
- Multiplicity of positive solutions for quasilinear elliptic equations involving critical nonlinearity
- Lack of smoothing for bounded solutions of a semilinear parabolic equation
- Gradient estimates for the fundamental solution of Lévy type operator
- π/4-tangentiality of solutions for one-dimensional Minkowski-curvature problems
- On the existence and multiplicity of solutions to fractional Lane-Emden elliptic systems involving measures
- Anisotropic problems with unbalanced growth
- On a fractional thin film equation
- Minimum action solutions of nonhomogeneous Schrödinger equations
- Global existence and blow-up of weak solutions for a class of fractional p-Laplacian evolution equations
- Optimal rearrangement problem and normalized obstacle problem in the fractional setting
- A few problems connected with invariant measures of Markov maps - verification of some claims and opinions that circulate in the literature
Artikel in diesem Heft
- Frontmatter
- On the moving plane method for boundary blow-up solutions to semilinear elliptic equations
- Regularity of solutions of the parabolic normalized p-Laplace equation
- Cahn–Hilliard equation on the boundary with bulk condition of Allen–Cahn type
- Blow-up solutions for fully nonlinear equations: Existence, asymptotic estimates and uniqueness
- Radon measure-valued solutions of first order scalar conservation laws
- Ground state solutions for a semilinear elliptic problem with critical-subcritical growth
- Generalized solutions of variational problems and applications
- Existence and non-existence results for Kirchhoff-type problems with convolution nonlinearity
- Nonlinear Sherman-type inequalities
- Global regularity for systems with p-structure depending on the symmetric gradient
- Homogenization of a net of periodic critically scaled boundary obstacles related to reverse osmosis “nano-composite” membranes
- Noncoercive resonant (p,2)-equations with concave terms
- Evolutionary quasi-variational and variational inequalities with constraints on the derivatives
- Sharp estimates on the first Dirichlet eigenvalue of nonlinear elliptic operators via maximum principle
- Localization and multiplicity in the homogenization of nonlinear problems
- Remarks on a nonlinear nonlocal operator in Orlicz spaces
- A Picone identity for variable exponent operators and applications
- On the weakly degenerate Allen-Cahn equation
- Continuity results for parametric nonlinear singular Dirichlet problems
- Construction of type I blowup solutions for a higher order semilinear parabolic equation
- Singularly perturbed Choquard equations with nonlinearity satisfying Berestycki-Lions assumptions
- Comparison results for nonlinear divergence structure elliptic PDE’s
- Constant sign and nodal solutions for parametric (p, 2)-equations
- Monotonicity formulas for coupled elliptic gradient systems with applications
- Berestycki-Lions conditions on ground state solutions for a Nonlinear Schrödinger equation with variable potentials
- A class of semipositone p-Laplacian problems with a critical growth reaction term
- The role of superlinear damping in the construction of solutions to drift-diffusion problems with initial data in L1
- Reconstruction of Tesla micro-valve using topological sensitivity analysis
- Lewy-Stampacchia’s inequality for a pseudomonotone parabolic problem
- Global well-posedness of nonlinear wave equation with weak and strong damping terms and logarithmic source term
- Regularity Criteria for Navier-Stokes Equations with Slip Boundary Conditions on Non-flat Boundaries via Two Velocity Components
- Homoclinics for singular strong force Lagrangian systems
- A constructive method for convex solutions of a class of nonlinear Black-Scholes equations
- On a class of nonlocal nonlinear Schrödinger equations with potential well
- Superlinear Schrödinger–Kirchhoff type problems involving the fractional p–Laplacian and critical exponent
- Regularity for minimizers for functionals of double phase with variable exponents
- Boundary blow-up solutions to the Monge-Ampère equation: Sharp conditions and asymptotic behavior
- Homogenisation with error estimates of attractors for damped semi-linear anisotropic wave equations
- A-priori bounds for quasilinear problems in critical dimension
- Critical growth elliptic problems involving Hardy-Littlewood-Sobolev critical exponent in non-contractible domains
- On the Sobolev space of functions with derivative of logarithmic order
- On a logarithmic Hartree equation
- Critical elliptic systems involving multiple strongly–coupled Hardy–type terms
- Sharp conditions of global existence for nonlinear Schrödinger equation with a harmonic potential
- Existence for (p, q) critical systems in the Heisenberg group
- Periodic traveling fronts for partially degenerate reaction-diffusion systems with bistable and time-periodic nonlinearity
- Some hemivariational inequalities in the Euclidean space
- Existence of standing waves for quasi-linear Schrödinger equations on Tn
- Periodic solutions for second order differential equations with indefinite singularities
- On the Hölder continuity for a class of vectorial problems
- Bifurcations of nontrivial solutions of a cubic Helmholtz system
- On the exact multiplicity of stable ground states of non-Lipschitz semilinear elliptic equations for some classes of starshaped sets
- Sign-changing multi-bump solutions for the Chern-Simons-Schrödinger equations in ℝ2
- Positive solutions for diffusive Logistic equation with refuge
- Null controllability for a degenerate population model in divergence form via Carleman estimates
- Eigenvalues for a class of singular problems involving p(x)-Biharmonic operator and q(x)-Hardy potential
- On the convergence analysis of a time dependent elliptic equation with discontinuous coefficients
- Multiplicity and concentration results for magnetic relativistic Schrödinger equations
- Solvability of an infinite system of nonlinear integral equations of Volterra-Hammerstein type
- The superposition operator in the space of functions continuous and converging at infinity on the real half-axis
- Estimates by gap potentials of free homotopy decompositions of critical Sobolev maps
- Pseudo almost periodic solutions for a class of differential equation with delays depending on state
- Normalized multi-bump solutions for saturable Schrödinger equations
- Some inequalities and superposition operator in the space of regulated functions
- Area Integral Characterization of Hardy space H1L related to Degenerate Schrödinger Operators
- Bifurcation of time-periodic solutions for the incompressible flow of nematic liquid crystals in three dimension
- Morrey estimates for a class of elliptic equations with drift term
- A singularity as a break point for the multiplicity of solutions to quasilinear elliptic problems
- Global and non global solutions for a class of coupled parabolic systems
- On the analysis of a geometrically selective turbulence model
- Multiplicity of positive solutions for quasilinear elliptic equations involving critical nonlinearity
- Lack of smoothing for bounded solutions of a semilinear parabolic equation
- Gradient estimates for the fundamental solution of Lévy type operator
- π/4-tangentiality of solutions for one-dimensional Minkowski-curvature problems
- On the existence and multiplicity of solutions to fractional Lane-Emden elliptic systems involving measures
- Anisotropic problems with unbalanced growth
- On a fractional thin film equation
- Minimum action solutions of nonhomogeneous Schrödinger equations
- Global existence and blow-up of weak solutions for a class of fractional p-Laplacian evolution equations
- Optimal rearrangement problem and normalized obstacle problem in the fractional setting
- A few problems connected with invariant measures of Markov maps - verification of some claims and opinions that circulate in the literature