On the convergence analysis of a time dependent elliptic equation with discontinuous coefficients
-
Mohamed Abdelwahed
 und
Nejmeddine Chorfi
und
Nejmeddine Chorfi

Abstract
In this paper, we consider a heat equation with diffusion coefficient that varies depending on the heterogeneity of the domain. We propose a spectral elements discretization of this problem with the mortar domain decomposition method on the space variable and Euler’s implicit scheme with respect to the time. The convergence analysis and an optimal error estimates are proved.
1 Introduction
This paper is devoted to the numerical analysis of the mortar spectral element discretization of the heat equation in an heterogenous medium with a variable diffusion coefficient λ formulated by the problem (1),
The connected two-dimentional domain Ω is open and bounded with a Lipschtiz-continuous boundary ∂Ω. Let T be a fixed positive real. We suppose that the function λ is positive and does not depend on time.
This problem was handled in some previous works on different cases [1]. The case where the function λ is not globally continuous is presented in [2, 3, 4]. The a priori and a posteriori analysis were proposed based on the finite element method and the spectral discretization. For the case where λ is piecewise constant and such that the ratio of its maximal value to its minimal value is large enough, the discretization of the stationary problem is studied in [5] by conforming finite elements and in [6] by the mortar spectral discretization. In the present work, we consider a non stationary problem with λ is piecewise constant. We proceed to the domain decomposition in two steps. Firstly, We associate a decomposition based on the value of λ (i.e. λ is constant on each sub-domain). Secondly, each obtained sub-domain is itself decomposed on rectangles using the mortar spectral method. The later is considered as the most suitable method for handling nonconforming decomposition (i.e the intersection of two sub-domains is not restricted to be a corner or a whole edge of both of them) [7]. The number of sub-domains can be highly reduced thanks to the non-conformity property. We refer to [8] for a first application of this method to discontinuous coefficient in the finite element method.
The discretization in time of our problem is based on the implicit Euler method. We prove that the semi-discrete problem on time is well posed and we give a time error estimate of order one. On each sub-domain, we consider a spectral discretization which approaches the solution by high degree polynomials. Since the basis of polynomials are tensorized, the sub-domains are rectangles. Different degrees of polynomials are chosen on each sub-domain according to the different values of λ. We prove that the discrete problem is well posed and we show an optimal error estimate for a good choice of domain decomposition. An outline of the paper is as follows:
In section 2 we present the continuous problem and some regularity results.
The section 3 is about the analysis and the error estimate of the semi-discrete problem on time.
The mortar spectral element discretization is developed in section 4.
In section 5, we perform the estimation of the error.
Section 6 is an annex of the proof of the error estimation since it is quite technical.
2 The continuous problem
We denote by x = (x, y) the generic point in ℝ2, and we suppose that there exists a finite number of sub-domain
the restriction of λ to each
λ is bounded on each
We define
Let Hs(Ω), s > 0, the Sobolev spaces associated with the norm ∥ . ∥s,Ω and the semi-norm | . |s,Ω. The space
We introduce some notions to clarify the spaces of functions that depend on time. The function u(x, t), defined on the domain Ω×]0, T[, can be written as:
where X is a separable Banach space. We define 𝓒j(0, T; X) the set of time 𝓒j classes functions with a value on X. 𝓒j(0, T; X) is a Banach space for the norm
where
and
Lp(0, T; X) is a Banach space for the norm
and Hs(0, T; X) is an Hilbert space for the following scalar product:
Problem (1) admits the equivalent variational formulation:
For t ∈ ]0, T[ and f ∈ L2(0, T; H–1(Ω)), find u ∈ 𝓒0(0, T;
where < ., . > is the duality product between
We introduce the energy norm
We recall the following proposition (see [9], chap 3 for its proof).
Proposition 1
For f ∈ L2(0, T; H–1(Ω)) and u0 ∈ L2(Ω), the problem (3) has a unique solution u ∈ L2(0, T;
We have the regularity result proved in ([5], Prop 2.2) and [10].
Proposition 2
We suppose that the restriction of the function λ on each sub-domain
Remark 1
The maximum value of the real s0 is bounded in the following way (see [10])
where C is a constant that depends only on the domain Ω.
3 The time semi discrete problem
To find the discrete problem in time, we introduce a partition of the interval [0, T]. Let [tn–1, tn] the sub-interval of this partition, such that 0 = t0 < t1 < … < tn–1 < … < tM = T where M is a positive integer. We notice τ = tn – tn–1, 1 ≤ n ≤ M the step of the partition that we suppose constant. We denote by v(., tn) = vn, 0 ≤ n ≤ M. We define the function vτ which is affine on each interval [tn–1, tn] by
Using Euler implicit method, the semi discrete problem is written as follows:
The problem (7) has the equivalent variational formulation: Find (un)0≤n≤M ∈ L2(Ω) ×
Let the bilinear form an(., .) and the linear form Ln(.) defined respectively by
and
It is easy to prove that the bilinear form an(., .) is continuous on the space
Proposition 3
For any function f in 𝓒0(0, T; H–1(Ω)) and u0 ∈ L2(Ω), problem (8) has a unique solution (un)0≤n≤M ∈ L2(Ω) × (
If we take v = un in problem (8), we deduce the following inequality:
and by making the sum on n we conclude:
Proposition 4
For f in 𝓒0(0, T; H–1(Ω)) and u0 ∈ H1(Ω), the solution (un)0≤n≤M of problem (8) satisfies the following estimation
Proof
To prove the estimation (10), we have to compare the two terms
According to the definition of the function uτ defined in (6), we have ∀x ∈ Ω
where ’.’ is the scalar product in ℝ2 and | . | its associate norm.
Then
Given that
We deduce the first inequality of (10) by doing the sum on k.
Now using the fact that
By doing the sum on k and using the estimation (9) we prove the second inequality of (10).□
We define the norm ∥ . ∥n by:
The a priori error estimate is the object of the following theorem.
Theorem 3.1
If the solution u of problem (3) verifies that
where c is a positive constant.
Proof
Let ej = u(tj) – uj, 1 ≤ j ≤ M and e0 = 0. Taking t = tj in problem (3), we obtain
Since
then using the variational formulation (8), we deduce that for any v ∈
We remark that the error ej is the solution of problem (8) for a data function
By applying the mean value theorem and (9), we obtain, for
where c is a positive constant.
We conclude by using the proposition 4.□
4 The mortar spectral element discretization
In this section we consider the function λ piecewise constant. The spectral discretization requires that the elements be rectangles, which leads us to make another partition without overlapping of the domain Ω
We suppose the function λ is constant on each Ωi, 1 ≤ i ≤ I. We remark that for any 1 ≤ i ≤ I, there exits 1 ≤ j ≤ I∘, such that Ωi ⊂
To explain this problem, we take the case where I∘ = 2. This means that Ω is composed of two heterogeneous regions (see figure 1). To handle this domain by spectral discretization, we need 5 rectangles (I = 5).
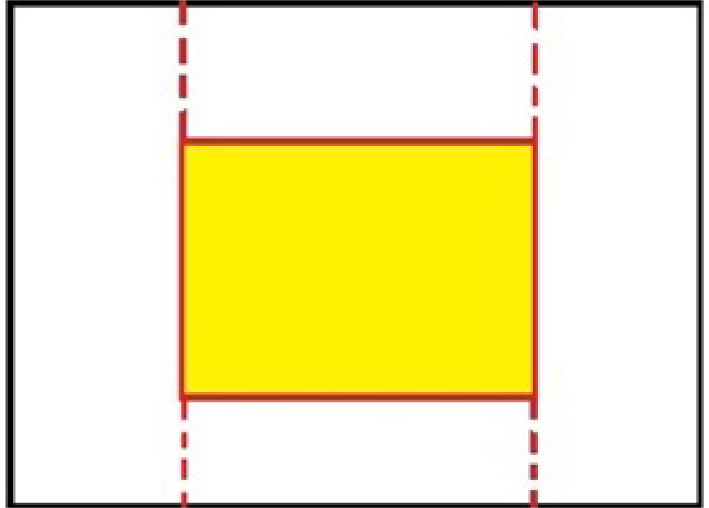
The domain Ω
However, 9 rectangles are required for a conforming decomposition. We mean by conforming that if the intersection of two rectangles Ωi and Ωj, i ≠ j is not empty, it is necessarily equal to a corner or to a hole edge of Ωi and Ωj.
We suppose that the intersection of each boundary ∂Ωi of the sub-domain Ωi with the boundary ∂Ω of the domain Ω is a corner or a hole edge of Ωi. The skeleton of the decomposition
is equal to
where ym is called mortar, which is equal to a hole edge of one sub-domain Ωi that we note Ωi(m). Let ℙNi(Ωi), Ni ≥ 2, 1 ≤ i ≤ I, the space of the polynomial functions defined on Ωi, with degree ≤ Ni, for the two variables x and y.
We define the mortar discrete space 𝕏δ, (δ = (N1, …, NI) is the discretization parameter) as the space of functions uδ such that (see [7]):
uδ/Ωi, 1 ≤ i ≤ I, belongs to the polynomial space ℙNi(Ωi),
uδ vanishes on the boundary ∂Ω,
let ϕ the mortar function such that ϕ/ym = uδ/Ωi(m)/ym, for each Ωi, 1 ≤ i ≤ I and an edge Γ of Ωi, which is not included on the boundary ∂Ω, we have the following matching condition:
where ℙNi–2(Γ) is the space of polynomials with degree ≤ (Ni – 2), defined on Γ. Since Γ does not always coincide with a mortar ym, 1 ≤ m ≤ 𝓜, this allows us to say that the discretization is not conforming (𝕏δ is not a subspace of H1(Ω)).
We remind the Gauss-Lobatto quadrature formula on the interval Λ = ]–1, 1[:
If N ≥ 2 is an integer, let ϵ0 = –1 and ϵN = 1, there exists a unique set of nodes ϵk, 1 ≤ k ≤ (N – 1) and weights ϱk, 0 ≤ k ≤ N, such that:
Hereinafter, We recall the following property (see [11]):
We find the value of the nodes and weights
For φ and ψ continuous on each Ωi, 1 ≤ i ≤ I
where
Let
We introduce the auxiliary space
and ℑδ the Lagrange interpolation operator defined as:
For all φ ∈ 𝕏δ such as φ/Ωi, 1 ≤ i ≤ I is continuous on Ωi, ℑδ(φ) ∈ 𝕐δ, with
We suppose for any 0 ≤ n ≤ M, fn is continuous on each sub-domain Ωi, 1 ≤ i ≤ I. Then we define the discrete problem:
Find
and
The bilinear form
and
Since the discretization is not conforming, we define the broken energy norm on 𝕏δ
Lemma 1
There exist two constants c1 and c2 independent of δ such that for all vδ in 𝕏δ, we have the following equivalence:
Proof
From (22) we deduce that
We conclude (23) since
are equivalent with constants c1 and c2 independent of δ (see [12]).□
We prove using (17), Cauchy-Schwarz inequality and lemma 1 that the bilinear form
Theorem 1
For f continuous on Ω×[0, T] and u0 continuous on Ω, problem (19) has a unique solution
where C is the Poincaré-Friedrichs constant which only depends on the domain Ω.
Proof 1
Let vδ =
Using (17), Poincaré-Friedrichs inequality and the fact that
where C is the Poincaré-Friedrichs constant.
Doing the sum on n and using (17)
Then we conclude by choosing
5 Error estimate
For 1 ≤ n ≤ M, we recall that un is the solution of problem (7). In the case where λ is piecewise constant, problem (7) is written:
Multiplying the first equation in (24) by vδ ∈ 𝕏δ and integrating by parts gives
where ni is the unit normal vector to ∂Ωi.
If we define [vδ] the jump of vδ through the skeleton S, we obtain
Proposition 5
If f and u0 are respectively continuous on Ω × [0, T] and Ω, then the error estimate between (un)0≤n≤M ∈ L2(Ω) × (
where
and c is a positive constant independent of δ.
Proof 2
Let
To estimate the term
and
By doing the difference term by term, we obtain
where
We remark that 𝓛n is linear and continuous on 𝕏δ which is an Hilbert space for the scalar product (., .)δ. Then, by Riesz theorem, there exists a unique element
Therefore, we conclude that
We remark that
which permits to conclude (26).
Let for each mortar ym ⊂ S, 1 ≤ m ≤ 𝓜, ζ(m) is the set of subscripts i, 1 ≤ i ≤ I, such that ∂Ωi ∩ ym has a positive measure. By estimating each term in (26), we obtain the following result proved in section 6.
Theorem 2
For λ constant on each Ωi, 1 ≤ i ≤ I. Let f such that f/Ωi ∈ 𝓒0(0, T; Hσi(Ωi));
σi > 1, u0 is such that u0/Ωi ∈ Hμi(Ωi);μi > 1 and the solution (un)0≤n≤M of problem (8) is such that
where c is a positive constant independent of δ,
and
Remark 2
For a conforming decomposition, the term βδ vanishes. Since there is no restriction on choosing of mortars, we opt, if it is possible, for those leading to
Thus β ≤ 1. If it is not possible, we choose the mortars and the degrees of approximation polynomials such that
which may force us to make a small change in the decomposition. So we can optimize the estimation (27) without forcing the conformity of the decomposition.
6 Annex
This section is devoted to the proof of theorem 2. We need to estimate each term in (26).
6.1 Estimation of
E a 1 , j
We pose κj = uj – uj–1. By remarking that
where
The approximation properties of the operator
where, κj ∈ Hsi(Ωi); for si ≥ 1.
6.2 Estimation of
E a 2 , j
Using the exactness of the quadrature formula for a polynomial of degree ≤ 2N – 1, we write:
By the triangular and Cauchy-Schwarz inequalities, we obtain:
then we conclude by the properties of operator
6.3 Estimation of
E f j
Let ΠNi–1 the orthogonal projection from L2(Ωi) to ℙNi–1(Ωi). We have by the exactness of the quadrature formula, for a polynomial of degree ≤ 2Ni – 1,
for all wδ ∈ 𝕏δ.
Using (17) in each direction, we obtain
Using lemma 1 to bound ∥wδ∥0,Ω by ∥wδ∥𝕏δ and the approximation properties of operator ΠNi–1 (see [11], Theorem 7.1) and ℑδ (see [11], Theorem 14.2) for fj ∈ Hσi(Ωi); σi > 1, we obtain
6.4 Estimation of
E c j
Let the operator
This operator is discontinuous through the skeleton S. It means that if Γ = ∂Ωi ∩ ∂Ωi′, 1 ≤ i < i′ ≤ I, we have
Lemma 2
For uj in 𝕏δ, 1 ≤ j ≤ n, such that
where
Proof 3
Let ψ the mortar function associated to wδ ∈ 𝕏δ. By the matching condition (15), for each edge Γ of ∂Ωi, 1 ≤ i ≤ I which is not mortar, we have:
where
We suppose now that the decomposition is conforming, then Γ = Ωi ∩ Ωi′, 1 ≤ i ≠ i′ ≤ I. We know that
If 0 < si <
For v ∈ H1/2–si(Γ)
where ṽ is the lifting function in H1–si(Ωi) of v.
Therefore, since
Thus, the approximation properties (see [11]) allows us to deduce
We remark that ∥wδ∥1/2,Γ is bounded by ∥wδ∥1,Ωi and since the decomposition is conforming, ∥ψ∥1/2,Γ is bounded by ∥wδ∥1,Ωi′ which permit to conclude.
In the case where si >
We conclude thanks to the approximation properties of
The estimation in the case si = 1/2 is given by interpolation argument. In the case where Γ = ∂Ωi ∩ ∂Ω, the mortar function ψ ∉ H1/2(Γ) and a modification make appears (log(Ni))1/2 ([13], proposition 21).
Remark 3
The term (log(Ni))1/2 is negligible compared to
6.5 Estimation of
inf v δ n ∈ X δ ∥ u n − v δ n ∥ n
Lemma 3
Let un ∈ 𝕏δ; 1 ≤ n ≤ M such that
where c is a positive constant independent on δ and
depends on δ.
Proof 4
The proof will be done in three steps to construct
Let
Let
where
where the function
Let ϖ the set of vertices of Ωi which are not a boundary of an edge of an other sub-domain Ωi′. For c ∈ ϖ, ζ(c) is the set of subscripts i, 1 ≤ i ≤ I such that c ∈ ∂Ωi. We denote by i(c) the index of ζ(c) such that
and for i ∈ ζ(c)/{i(c)}, we define
So, we have for 0 ≤ t ≤ 3/2
Thanks to the Gagliardo-Nirenberg inequality, for 0 < αi < 1/2
Since λi ≤ λi(c) and using (30) (for t = 1 – αi and t = 1 + αi), we conclude that:
Therefore, we end by doing the sum on i, 1 ≤ i ≤ I.
Let 𝓗i, 1 ≤ i ≤ I the set of edges of Ωi which are not include in ∂Ω and are not mortars.
If φ is the mortar function associated to
where
Then following (31)
Since
where [.] is the jump through Γ.
Using the trace theorem, (30) and (31), we conclude for t = 1 that
To evaluate the second term in (34), we remark that the operator
Therefore, we proceed as before with t = 3/2, we obtain
This is where we introduce βδ.
To conclude the proof of Theorem 2, we choose
Conclusion
This work concerns the numerical analysis of the mortar spectral elements method discretization of the heat equation with a diffusion coefficient λ, depending on the heterogeneity of the domain. To solve the problem of the solution singularity due to the discontinuity of λ, we use a non conform geometric decomposition of the domain. We prove an optimal error estimate that depends only on the local regularity of the solution. The numerical validation of this result will be the subject of a forthcoming work.
Acknowledgments
The authors acknowledge funding from the Research and Development (R&D) Program (Research Pooling Initiative), Ministry of Education, Riyadh, Saudi Arabia, (RPI-KSU).
References
[1] N.S. Papageorgiou, V.D. Radulescu and D.D. Repovs, Nonlinear analysis – theory and methods, Springer Monographs in Mathematics. Springer, Cham, 2019.10.1007/978-3-030-03430-6Suche in Google Scholar
[2] A. Bergam, C. Bernardi and Z. Mghazli, A posteriori analysis of the finite element discretization of some parabolic equations, Math. Comp. 74 (2005), no. 251, 1117-1138.10.1090/S0025-5718-04-01697-7Suche in Google Scholar
[3] N. Chorfi, M. Abdelwahed and I. Ben Omrane, A posteriori analysis of the spectral element discretization of heat equation, An. St. Univ. Ovidius Constanta. 22 (3) (2014), 13-35.10.2478/auom-2014-0047Suche in Google Scholar
[4] V. Thomée, Galerkin Finite Element Methods for Parabolic Problems, Springer Series in Computational Mathematics 25, Springer, Paris, 1997.10.1007/978-3-662-03359-3Suche in Google Scholar
[5] C. Bernardi and R. Verfürth, Adaptive finite element methods for elliptic equations with non-smooth coefficients, Numer. Math. 85 (2000) 579-608.10.1007/PL00005393Suche in Google Scholar
[6] C. Bernardi and N. Chorfi, Mortar spectral element methods for elliptic equations with discontinuous coefficients, Math. Models Methods Appl. Sci. 12 (2002), no. 4, 497-524.10.1142/S0218202502001763Suche in Google Scholar
[7] C. Bernardi, Y. Maday and A. T. Patera, A new nonconforming approch to domain decomposition: the mortar element method, in Nonlinear Partial Differential Equations and their Applications, Collège de France Seminar, H. Brézis, J.-L. Lions, Eds, (1991).Suche in Google Scholar
[8] B. I. Wohlmuth, Discretisation Methods and Iterative Solvers Based on Domain Decomposition, Lecture Notes in Computational Science and Engineering, Vol. 17 (Springer 2001).10.1007/978-3-642-56767-4Suche in Google Scholar
[9] J. L. Lions and E. Magenes, Problèmes aux Limites non Homogène et Applications, 1, Dunod, (1968).Suche in Google Scholar
[10] N. G. Meyers, An Lp-estimate for the gradient of solutions of second order elliptic divergence equations, Ann. Sci. Norm. Sup. Pisa 17 (1963) 189-206.Suche in Google Scholar
[11] C. Bernardi and Y. Maday, Spectral Methods, in Handbook of Numerical Analysis V, P.G. Ciarlet and J.-L. Lions, eds., North–Holland, Amsterdam, 1997, pp. 209-485.10.1016/S1570-8659(97)80003-8Suche in Google Scholar
[12] M. Azaïez, C. Bernardi and Y. Maday, Some tools for adaptivity in the spectral element method, in Proc. of Third Int. Conf. On Spectral And High Order Methods, Houston J. Math. (1996) 243-253.Suche in Google Scholar
[13] C. Bernardi and Y. Maday, Spectral, spectral element and mortar element methods, in Theory and Numerics of Differential Equations, Durham 2000, eds. J. F. Blowey, J. P. coleman and A. W. Craig (Springer, 2001), pp. 1-57.10.1007/978-3-662-04354-7_1Suche in Google Scholar
[14] C. Bernardi, M. Dauge, and Y. Maday, Polynomials in the Sobolev World, Internal Report, Laboratoire Jacques-Louis Lions, Université Pierre et Marie Curie, Paris, France, 2003.Suche in Google Scholar
© 2019 Mohamed Abdelwahed and Nejmeddine Chorfi, published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 Public License.
Artikel in diesem Heft
- Frontmatter
- On the moving plane method for boundary blow-up solutions to semilinear elliptic equations
- Regularity of solutions of the parabolic normalized p-Laplace equation
- Cahn–Hilliard equation on the boundary with bulk condition of Allen–Cahn type
- Blow-up solutions for fully nonlinear equations: Existence, asymptotic estimates and uniqueness
- Radon measure-valued solutions of first order scalar conservation laws
- Ground state solutions for a semilinear elliptic problem with critical-subcritical growth
- Generalized solutions of variational problems and applications
- Existence and non-existence results for Kirchhoff-type problems with convolution nonlinearity
- Nonlinear Sherman-type inequalities
- Global regularity for systems with p-structure depending on the symmetric gradient
- Homogenization of a net of periodic critically scaled boundary obstacles related to reverse osmosis “nano-composite” membranes
- Noncoercive resonant (p,2)-equations with concave terms
- Evolutionary quasi-variational and variational inequalities with constraints on the derivatives
- Sharp estimates on the first Dirichlet eigenvalue of nonlinear elliptic operators via maximum principle
- Localization and multiplicity in the homogenization of nonlinear problems
- Remarks on a nonlinear nonlocal operator in Orlicz spaces
- A Picone identity for variable exponent operators and applications
- On the weakly degenerate Allen-Cahn equation
- Continuity results for parametric nonlinear singular Dirichlet problems
- Construction of type I blowup solutions for a higher order semilinear parabolic equation
- Singularly perturbed Choquard equations with nonlinearity satisfying Berestycki-Lions assumptions
- Comparison results for nonlinear divergence structure elliptic PDE’s
- Constant sign and nodal solutions for parametric (p, 2)-equations
- Monotonicity formulas for coupled elliptic gradient systems with applications
- Berestycki-Lions conditions on ground state solutions for a Nonlinear Schrödinger equation with variable potentials
- A class of semipositone p-Laplacian problems with a critical growth reaction term
- The role of superlinear damping in the construction of solutions to drift-diffusion problems with initial data in L1
- Reconstruction of Tesla micro-valve using topological sensitivity analysis
- Lewy-Stampacchia’s inequality for a pseudomonotone parabolic problem
- Global well-posedness of nonlinear wave equation with weak and strong damping terms and logarithmic source term
- Regularity Criteria for Navier-Stokes Equations with Slip Boundary Conditions on Non-flat Boundaries via Two Velocity Components
- Homoclinics for singular strong force Lagrangian systems
- A constructive method for convex solutions of a class of nonlinear Black-Scholes equations
- On a class of nonlocal nonlinear Schrödinger equations with potential well
- Superlinear Schrödinger–Kirchhoff type problems involving the fractional p–Laplacian and critical exponent
- Regularity for minimizers for functionals of double phase with variable exponents
- Boundary blow-up solutions to the Monge-Ampère equation: Sharp conditions and asymptotic behavior
- Homogenisation with error estimates of attractors for damped semi-linear anisotropic wave equations
- A-priori bounds for quasilinear problems in critical dimension
- Critical growth elliptic problems involving Hardy-Littlewood-Sobolev critical exponent in non-contractible domains
- On the Sobolev space of functions with derivative of logarithmic order
- On a logarithmic Hartree equation
- Critical elliptic systems involving multiple strongly–coupled Hardy–type terms
- Sharp conditions of global existence for nonlinear Schrödinger equation with a harmonic potential
- Existence for (p, q) critical systems in the Heisenberg group
- Periodic traveling fronts for partially degenerate reaction-diffusion systems with bistable and time-periodic nonlinearity
- Some hemivariational inequalities in the Euclidean space
- Existence of standing waves for quasi-linear Schrödinger equations on Tn
- Periodic solutions for second order differential equations with indefinite singularities
- On the Hölder continuity for a class of vectorial problems
- Bifurcations of nontrivial solutions of a cubic Helmholtz system
- On the exact multiplicity of stable ground states of non-Lipschitz semilinear elliptic equations for some classes of starshaped sets
- Sign-changing multi-bump solutions for the Chern-Simons-Schrödinger equations in ℝ2
- Positive solutions for diffusive Logistic equation with refuge
- Null controllability for a degenerate population model in divergence form via Carleman estimates
- Eigenvalues for a class of singular problems involving p(x)-Biharmonic operator and q(x)-Hardy potential
- On the convergence analysis of a time dependent elliptic equation with discontinuous coefficients
- Multiplicity and concentration results for magnetic relativistic Schrödinger equations
- Solvability of an infinite system of nonlinear integral equations of Volterra-Hammerstein type
- The superposition operator in the space of functions continuous and converging at infinity on the real half-axis
- Estimates by gap potentials of free homotopy decompositions of critical Sobolev maps
- Pseudo almost periodic solutions for a class of differential equation with delays depending on state
- Normalized multi-bump solutions for saturable Schrödinger equations
- Some inequalities and superposition operator in the space of regulated functions
- Area Integral Characterization of Hardy space H1L related to Degenerate Schrödinger Operators
- Bifurcation of time-periodic solutions for the incompressible flow of nematic liquid crystals in three dimension
- Morrey estimates for a class of elliptic equations with drift term
- A singularity as a break point for the multiplicity of solutions to quasilinear elliptic problems
- Global and non global solutions for a class of coupled parabolic systems
- On the analysis of a geometrically selective turbulence model
- Multiplicity of positive solutions for quasilinear elliptic equations involving critical nonlinearity
- Lack of smoothing for bounded solutions of a semilinear parabolic equation
- Gradient estimates for the fundamental solution of Lévy type operator
- π/4-tangentiality of solutions for one-dimensional Minkowski-curvature problems
- On the existence and multiplicity of solutions to fractional Lane-Emden elliptic systems involving measures
- Anisotropic problems with unbalanced growth
- On a fractional thin film equation
- Minimum action solutions of nonhomogeneous Schrödinger equations
- Global existence and blow-up of weak solutions for a class of fractional p-Laplacian evolution equations
- Optimal rearrangement problem and normalized obstacle problem in the fractional setting
- A few problems connected with invariant measures of Markov maps - verification of some claims and opinions that circulate in the literature
Artikel in diesem Heft
- Frontmatter
- On the moving plane method for boundary blow-up solutions to semilinear elliptic equations
- Regularity of solutions of the parabolic normalized p-Laplace equation
- Cahn–Hilliard equation on the boundary with bulk condition of Allen–Cahn type
- Blow-up solutions for fully nonlinear equations: Existence, asymptotic estimates and uniqueness
- Radon measure-valued solutions of first order scalar conservation laws
- Ground state solutions for a semilinear elliptic problem with critical-subcritical growth
- Generalized solutions of variational problems and applications
- Existence and non-existence results for Kirchhoff-type problems with convolution nonlinearity
- Nonlinear Sherman-type inequalities
- Global regularity for systems with p-structure depending on the symmetric gradient
- Homogenization of a net of periodic critically scaled boundary obstacles related to reverse osmosis “nano-composite” membranes
- Noncoercive resonant (p,2)-equations with concave terms
- Evolutionary quasi-variational and variational inequalities with constraints on the derivatives
- Sharp estimates on the first Dirichlet eigenvalue of nonlinear elliptic operators via maximum principle
- Localization and multiplicity in the homogenization of nonlinear problems
- Remarks on a nonlinear nonlocal operator in Orlicz spaces
- A Picone identity for variable exponent operators and applications
- On the weakly degenerate Allen-Cahn equation
- Continuity results for parametric nonlinear singular Dirichlet problems
- Construction of type I blowup solutions for a higher order semilinear parabolic equation
- Singularly perturbed Choquard equations with nonlinearity satisfying Berestycki-Lions assumptions
- Comparison results for nonlinear divergence structure elliptic PDE’s
- Constant sign and nodal solutions for parametric (p, 2)-equations
- Monotonicity formulas for coupled elliptic gradient systems with applications
- Berestycki-Lions conditions on ground state solutions for a Nonlinear Schrödinger equation with variable potentials
- A class of semipositone p-Laplacian problems with a critical growth reaction term
- The role of superlinear damping in the construction of solutions to drift-diffusion problems with initial data in L1
- Reconstruction of Tesla micro-valve using topological sensitivity analysis
- Lewy-Stampacchia’s inequality for a pseudomonotone parabolic problem
- Global well-posedness of nonlinear wave equation with weak and strong damping terms and logarithmic source term
- Regularity Criteria for Navier-Stokes Equations with Slip Boundary Conditions on Non-flat Boundaries via Two Velocity Components
- Homoclinics for singular strong force Lagrangian systems
- A constructive method for convex solutions of a class of nonlinear Black-Scholes equations
- On a class of nonlocal nonlinear Schrödinger equations with potential well
- Superlinear Schrödinger–Kirchhoff type problems involving the fractional p–Laplacian and critical exponent
- Regularity for minimizers for functionals of double phase with variable exponents
- Boundary blow-up solutions to the Monge-Ampère equation: Sharp conditions and asymptotic behavior
- Homogenisation with error estimates of attractors for damped semi-linear anisotropic wave equations
- A-priori bounds for quasilinear problems in critical dimension
- Critical growth elliptic problems involving Hardy-Littlewood-Sobolev critical exponent in non-contractible domains
- On the Sobolev space of functions with derivative of logarithmic order
- On a logarithmic Hartree equation
- Critical elliptic systems involving multiple strongly–coupled Hardy–type terms
- Sharp conditions of global existence for nonlinear Schrödinger equation with a harmonic potential
- Existence for (p, q) critical systems in the Heisenberg group
- Periodic traveling fronts for partially degenerate reaction-diffusion systems with bistable and time-periodic nonlinearity
- Some hemivariational inequalities in the Euclidean space
- Existence of standing waves for quasi-linear Schrödinger equations on Tn
- Periodic solutions for second order differential equations with indefinite singularities
- On the Hölder continuity for a class of vectorial problems
- Bifurcations of nontrivial solutions of a cubic Helmholtz system
- On the exact multiplicity of stable ground states of non-Lipschitz semilinear elliptic equations for some classes of starshaped sets
- Sign-changing multi-bump solutions for the Chern-Simons-Schrödinger equations in ℝ2
- Positive solutions for diffusive Logistic equation with refuge
- Null controllability for a degenerate population model in divergence form via Carleman estimates
- Eigenvalues for a class of singular problems involving p(x)-Biharmonic operator and q(x)-Hardy potential
- On the convergence analysis of a time dependent elliptic equation with discontinuous coefficients
- Multiplicity and concentration results for magnetic relativistic Schrödinger equations
- Solvability of an infinite system of nonlinear integral equations of Volterra-Hammerstein type
- The superposition operator in the space of functions continuous and converging at infinity on the real half-axis
- Estimates by gap potentials of free homotopy decompositions of critical Sobolev maps
- Pseudo almost periodic solutions for a class of differential equation with delays depending on state
- Normalized multi-bump solutions for saturable Schrödinger equations
- Some inequalities and superposition operator in the space of regulated functions
- Area Integral Characterization of Hardy space H1L related to Degenerate Schrödinger Operators
- Bifurcation of time-periodic solutions for the incompressible flow of nematic liquid crystals in three dimension
- Morrey estimates for a class of elliptic equations with drift term
- A singularity as a break point for the multiplicity of solutions to quasilinear elliptic problems
- Global and non global solutions for a class of coupled parabolic systems
- On the analysis of a geometrically selective turbulence model
- Multiplicity of positive solutions for quasilinear elliptic equations involving critical nonlinearity
- Lack of smoothing for bounded solutions of a semilinear parabolic equation
- Gradient estimates for the fundamental solution of Lévy type operator
- π/4-tangentiality of solutions for one-dimensional Minkowski-curvature problems
- On the existence and multiplicity of solutions to fractional Lane-Emden elliptic systems involving measures
- Anisotropic problems with unbalanced growth
- On a fractional thin film equation
- Minimum action solutions of nonhomogeneous Schrödinger equations
- Global existence and blow-up of weak solutions for a class of fractional p-Laplacian evolution equations
- Optimal rearrangement problem and normalized obstacle problem in the fractional setting
- A few problems connected with invariant measures of Markov maps - verification of some claims and opinions that circulate in the literature