Anti-synchronization of fractional order chaotic and hyperchaotic systems with fully unknown parameters using modified adaptive control
-
 and
and

Abstract
The objective of this article is to implement and extend applications of adaptive control to anti-synchronize different fractional order chaotic and hyperchaotic dynamical systems. The sufficient conditions for achieving anti–synchronization are derived by using the Lyapunov stability theory and an analytic expression of the controller with its adaptive laws of parameters is shown. Theoretical analysis and numerical simulations are shown to verify the results.
1 Introduction
We have seen some dramatic and amazing developments in the research of fractional order chaotic dynamics, particularly with respect to their interaction with the other fields of research and applications. There is now a developed science of fractional order chaos that has a vitally strong interaction between theory and experiment. This is a great leap compared to previously, in which theoretical work existed largely in the absence of substantial experimental realizations. This subject has gained much interest and appreciation in practical applications such as viscoelastic systems, electrode-electrolyte polarization, electromagnetic waves, etc. [1, 2]. Issues such as synchronization of fractional order chaotic systems in a broad variety of situations and the use of fractional order chaotic dynamics for various purposes are at the forefront of recent applications in nonlinear science. This topic encompasses a common link, which is uniting the knowledge of basic mathematical properties of fractional order chaos and specific practical considerations of various applications [3, 4]. A wide variety of approaches have been proposed for the synchronization of fractional order chaotic systems such as adaptive control, sliding mode control, linear active control technique, projective synchronization, and nonlinear active control [5, 30]. Another interesting phenomenon discovered is anti–synchronization (AS) which is noticeable in periodic oscillators. In the AS phenomenon, the state vectors of the synchronized systems have the same amplitude but opposite signs as those of the driving system. Thus, the sum of two signals are expected to converge to zero when AS appears. Several control methods have been applied to anti–synchronize chaotic systems [31–35]. Fortunately, some existing methods of anti–synchronizing of integer order can be generalized to anti-synchronize fractional order chaotic systems through some rigorous mathematical theory. However, in practical engineering situations, the parameters are probably unknown and may change from time to time. Therefore there is a vital need to effectively anti-synchronize two chaotic systems (identical and different) with unknown parameters. This is typically important in theoretical research as well as in practical applications. Among the aforementioned methods, the adaptive control strategy is an efficient control method to anti–synchronize fractional order chaotic chaotic systems. The adaptive control method is used when some or all parameters of the chaotic systems are unknown. The significant features of the adaptive control strategy include fast response, robustness against perturbations, good transient performance, and easy implementation in real applications. In (2013), Agrawal et. al [14] developed a novel adaptive synchronization scheme associated with the parameter update rule for identical and nonidentical fractional order chaotic systems with unknown parameters for the synchronization of fractional order as well as integer order chaotic systems. In spite of [14, 33–35], the epitome of this paper centers on fractional order chaos anti–synchronization between two fractional order chaotic systems, also the aforementioned method concerns synchronizing two fractional order chaotic system with low dimensional attractors characterized by one positive Lyapunov exponent. This feature limits the complexity of the fractional order chaotic dynamics. It is believed that fractional order chaotic systems with higher dimensional attractors have much wider applications. The rest of the paper is organized as follows. In section 2, we briefly describe the problem. In sections 3, we present the adaptive anti-synchronization scheme with a parameter update law for two different chaotic systems. Section 4, presents the adaptive anti-synchronization scheme with a parameter update law for two different hyperchaotic systems. The conclusion is given at the end.
2 Problem formulation
Preliminaries of fractional-order calculus
There are several definitions of fractional derivatives, the commonly used definition is the Riemann-Liouville definition, as follows:
where n = ⌈q⌉, and
where 0 < ϑ ≤ and Γ(.) is gamma function. The Caputo differential operator of fractional order q is defined as
where n = ⌈q⌉.
Modified adaptive anti–synchronization
Consider the chaotic master system described by
where x ∈ Ω1 ⊂ Rn is the state vector of system (6), α ∈ Rm is the unknown parameter vector of the system, f(x) is an n × 1 matrix, and F(x) is an n ∈ m matrix. Similarly, the slave system described by
where y ∈ Ω2 ⊂ Rn is the state vector of system (7), β ∈ Rq is the unknown parameter vector of the system, g(y) is an n × 1 matrix, G(y) is an n × q matrix, and u ∈ Rn is a control input vector. e = y + x is the anti–synchronization error vector. Our goal is to design a controller u such that the trajectory of the slave system (7) with initial conditions y0 can asymptotically approach the master system (6) with initial conditions x0 and finally implement anti–synchronization in the sense that
If the nonlinear control function is selected as
and the adaptive laws of the parameters are taken as
where
From Eqs. (7) and (6) we get the error dynamical system as follows:
Inserting (8) into (10) yields the following:
If a Lyapunov function candidate is chosen as
the time derivative of
Using Lemma 2 in Eq. (13) we get
From Eqs. (9) and (13), we get
since ∀q ∈ [0, 1], (1 − q) > 0 and (q - 1) < 0. Now, using Lemma 1 and Eq. (9), Eq. (15) reduces to
Since V and
3 Adaptive anti–synchronization between two fractional-order chaotic systems
In order to achieve the behavior of anti–synchronization between two fractional-order chaotic systems using modified adaptive control, we take the fractional-order chaotic Lü [35] system to be the drive system and the fractional-order chaotic Liu system [22] to be the response system. The variables of the drive system are represented by the subscript 1 and the response system by the subscript 2. Both systems are described respectively by the following equations:
and
where, U = (u1, u2, u3)T is the control function to be designed. In order to determine the control functions to realize adaptive anti–synchronization between the systems in Eqs. (17) and (18), we add (17) to (18) and obtain
where e1 = x2 + x1, e2 = y2 + y1, and e3 = z2 + z1. Our goal is to derive the controller U with a parameter estimation update law such that Eqs. (18) globally and asymptotically anti-synchronize Eqs.(17).
The fractional-order chaotic Liu system (18) can anti–synchronize the fractional-order Lü system (17) globally and asymptotically for any different initial condition with the following adaptive controller:
and parameter update rules
where
Applying the control law equation (20) to Eq. (19) yields the resulting closed-loop error dynamical system as follows:
where
Consider the following Lyapunov function candidate:
then the time derivative of V along the solution of the error dynamical system equation (22) gives
Using Lemma 2 in Eq. (24) we get
since ∀ q ∈ [0, 1], (1 - q) > 0 and (q - 1) < 0. Now, using Lemma 1, Eq. (25) reduces to
Since V is positive definite and
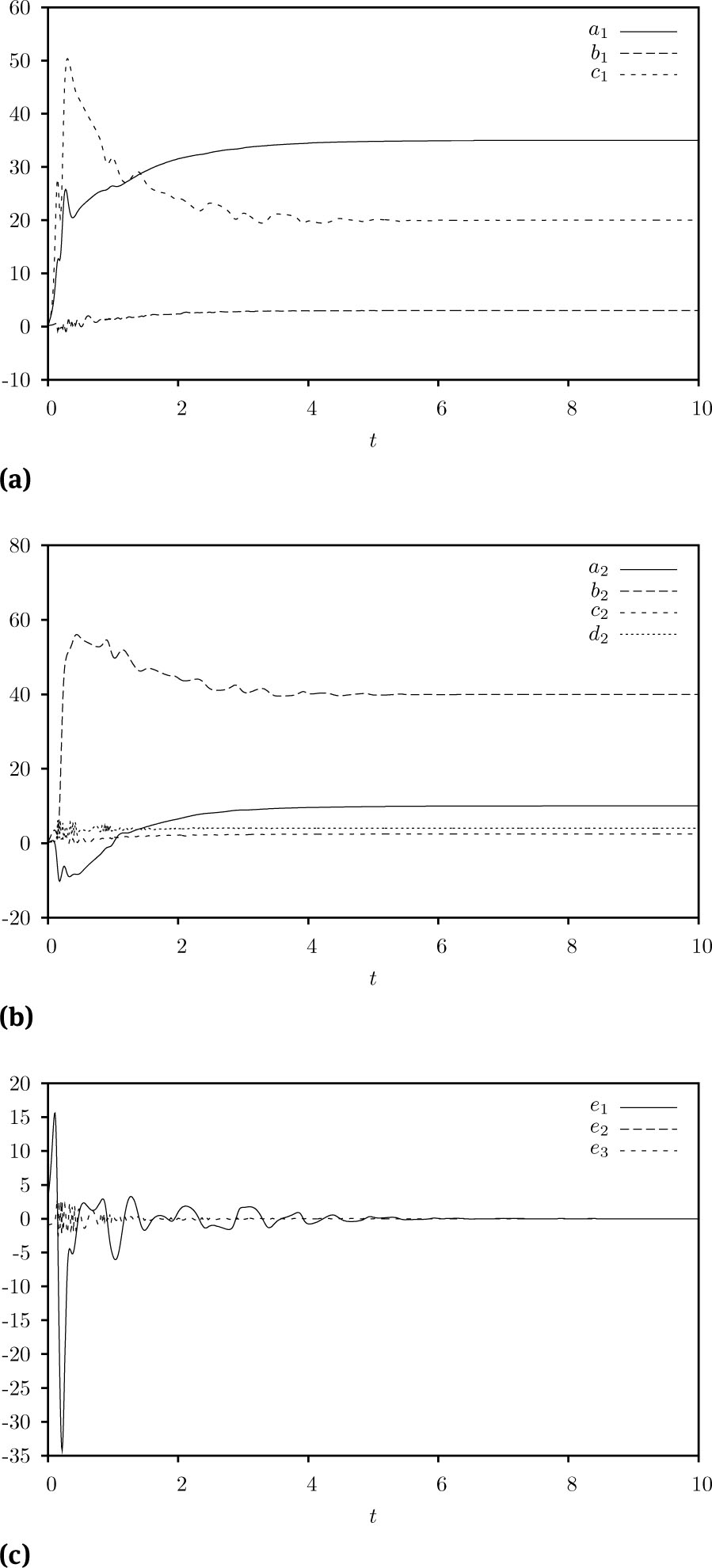
4 Numerical simulations
In the numerical simulations, the Adams-Bashforth-Moulton method is used to solve the systems. The fractional order is chosen as α = 0.95, and the unknown parameters are chosen as a1 = 35, b1 = 3, c1 = 20, and a2 = 10, b2 = 40, c2 = 2.5, and d2 = 4, so that both systems exhibit a chaotic behavior. The initial values of the fractional-order drive system (17), the fractional-order response system (18) and the estimated parameters are arbitrarily chosen in the simulations as (x1(0) = 0.2, y1(0) = 0.6, z1(0) = 1), (x2(0) = 7, y2(0) = 11, z2(0) = 15), and


Fractional-order chaotic Lü system (solid line) and the controlled fractional-order Liu system (dotted line)
5 Adaptive anti–synchronization between two fractional-order hyperchaotic systems
In order to achieve the behavior of anti–synchronization between two fractional-order chaotic systems using modified adaptive control, we take the fractional-order hyperchaotic Lorenz system [37] to be the drive system and the fractional-order hyperchaotic Chen system [38] to be the response system. The variables of the drive system are represented by the subscript 1 and the response system by the subscript 2. Both of the systems are described respectively by the following equations:
and
where U = (u1, u2, u3, u4)T is the control function to be designed. In order to determine the control functions to realize adaptive anti–synchronization between the systems in Eqs. (27) and (28), we add (27) to (28) and obtain
where e1 = x2 + x1, e2 = y2 + y1e3 = z2 + z1, and e4 = w2 + w1. Our goal is to derive the controller U with a parameter estimation update law such that Eqs. (28) globally and asymptotically anti-synchronize Eqs.(27).
The fractional-order hyperchaotic Lorenz system (28) can anti–synchronize with the fractional-order Chen system (27) globally and asymptotically for any different initial condition with the following adaptive controller:
and parameter update rules
where
Applying the control law equation (30) to Eq. (29) yields the resulting closed-loop error dynamical system as follows:
where
Consider the following Lyapunov function candidate:
then the time derivative of V along the solution of the error dynamical system equation (32) gives
Using Lemma 2 in Eq. (34) we get
since ∀ q ∈ [0, 1], (1 - q) > 0 and (q - 1) < 0. Now, using Lemma 1, Eq. (35) reduces to
Since V is positive definite and
6 Numerical simulations
In the numerical simulations, the Adams-Bashforth-Moulton method is used to solve the systems. The fractional order is chosen as α = 0.97, and the unknown parameters are chosen as a1 = 10, b1 = 8/3, c1 = 28, r1 = -1 and a2 = 35, b2 = 3, c2 = 12, r2 = 0.5, d2 = 7, so that both of the systems exhibit a hyperchaotic behavior. The initial values of the fractional-order drive system (27), the fractional-order response system (28) and the estimated parameters are arbitrarily chosen in simulations as (x1(0) = 2, y1(0) = 2, z1(0) = 2, w1(0) = -2), (x2(0) = 20, y2(0) = 10, z2(0) = 10, w2(0) = -15),



Fractional-order hyperchaotic Lorenz system (solid line) and the controlled fractional-order hyperchaotic Chen system (dotted line) in x − y − z projection.
7 Conclusion
In this paper, we have investigated the anti–synchronization of two different fractional order chaotic and hyperchaotic systems with uncertain parameters. Theoretical analysis was performed to demonstrate the effectiveness of the proposed control strategy. However, we would like to highlight that, in contrast to our method, the active control (cf. [35]) and H∞ approach (cf. [33, 33]) anti-synchronization are based on exactly known system parameters. As a matter of fact, in real physical systems or experimental situations some system parameters cannot be exactly known in advance so chaos control and anti-synchronization with uncertain parameters are universal and have received significant attention for their potential applications in prior work. Thus it is much more attractive and challenging to realize the anti–synchronization of two different fractional order chaotic and/or hyperchaotic systems with unknown parameters. We strongly believe that there is high potential in this method and future work is planned to include cost and noise analysis.
Acknowledgements
The authors are grateful to the anonymous referees for their useful comments on the earlier draft of this paper.
References
[1] Podlubny I., Fractional Differential Equations. Academic Press, New York (1999).Search in Google Scholar
[2] Hilfer R., Applications of Fractional Calculus in Physics. World Scientific, New Jersey (2001).10.1142/3779Search in Google Scholar
[3] Xiangjun W., Hongtao L., Shilei S., Synchronization of a new fractional-order hyperchaotic system, Phys. Lett. A., 2009, 373, 2329-2337.10.1016/j.physleta.2009.04.063Search in Google Scholar
[4] Sha W., Yongguang Y., Miao D., Hybrid projective synchronization of chaotic fractional order systems with different dimensions, Physica A., 2010, 389, 4981-4988.10.1016/j.physa.2010.06.048Search in Google Scholar
[5] Choon K.A., Output feedback H∞ synchronization for delayed chaotic neural networks, Nonlinear. Dyn., 2010, 59, 319-327.10.1007/s11071-009-9541-9Search in Google Scholar
[6] Choon K.A., Takagi-Sugeno fuzzy receding horizon H∞ chaotic synchronization and its application to the Lorenz system, Nonlinear Analysis: Hybrid Systems.,2013, 9, 1-8.10.1016/j.nahs.2013.01.002Search in Google Scholar
[7] Yonghui S., Jinde C., Adaptive synchronization between two different noise-perturbed chaotic systems with fully unknown parameters, Physica A., 2007, 376, 253-265.10.1016/j.physa.2006.10.039Search in Google Scholar
[8] Ju H. P., Adaptive synchronization of hyperchaotic Chen system with uncertain parameters, Chaos Soliton & Fract., 2005, 26, 959-964.10.1016/j.chaos.2005.02.002Search in Google Scholar
[9] Shihua C., Jinhu L., Parameters identification and synchronization of chaotic systems based upon adaptive control, Phys. Lett. A., 2002. 299, 353-358.10.1016/S0375-9601(02)00522-4Search in Google Scholar
[10] Junan L., Xiaoqun W., Xiuping H., Jinhu L., Adaptive feedback synchronization of a unified chaotic system, Phys. Lett. A., 2004 329, 327-333.10.1016/j.physleta.2004.07.024Search in Google Scholar
[11] Jian H., Chaos synchronization between two novel different hyperchaotic systems with unknown parameters. Nonlinear. Anal. T.M.A., 2008, 69, 4174-4181.10.1016/j.na.2007.10.045Search in Google Scholar
[12] Al-Sawalha M. M., Noorani M. S. M., Adaptive anti-synchronization of two identical and different hyperchaotic systems with uncertain parameters. Commun. Nonlinear. Sci., 2010, 15, 1036-1047.10.1016/j.cnsns.2009.05.037Search in Google Scholar
[13] Huaguang Z., Wei H., Zhiliang W., Tianyou C., Adaptive synchronization between two different chaotic systems with unknown parameters, Phys. Lett. A., 2006, 350, 363-366.10.1016/j.physleta.2005.10.033Search in Google Scholar
[14] Agrawal S. K., Das S., A modified adaptive control method for synchronization of some fractional chaotic systems with unknown parameters, Nonlinear. Dyn., 2013, 73, 907-919.10.1007/s11071-013-0842-7Search in Google Scholar
[15] Zhen W., Xia H., Hao S., Control of an uncertain fractional order economic system via adaptive sliding mode, Neurocomputing, 2012, 83, 83-88.10.1016/j.neucom.2011.11.018Search in Google Scholar
[16] Zhe G., Xiaozhong L., Integral sliding mode control for fractional-order systems with mismatched uncertainties, Nonlinear Dyn., 2013, 72, 27-35.10.1007/s11071-012-0687-5Search in Google Scholar
[17] Yong X., Hua W., Di L., Hui H., Sliding mode control of a class of fractional chaotic systems in the presence of parameter perturbations, Journal of Vibration and Control, 2015, 21, 1-14.Search in Google Scholar
[18] Mohamed Z., Nejib S., Haitham S., Synchronization of the unified chaotic systems using a sliding mode controller, Chaos Soliton & Fract., 2009, 42, 3197-3209.10.1016/j.chaos.2009.04.051Search in Google Scholar
[19] Wafaa J., Noorani M. S. M., Al-sawalha M.M., Anti-Synchronization of Chaotic Systems via Adaptive Sliding Mode Control, Chin. Phys. Lett., 2012, 29, 120505.10.1088/0256-307X/29/12/120505Search in Google Scholar
[20] Wafaa J., Noorani M. S. M., Al-sawalha M.M., Robust active sliding mode anti-synchronization of hyperchaotic systems with uncertainties and external disturbances, Nonlinear Analysis: Real World Applications., 2012, 13, 2403-2413.10.1016/j.nonrwa.2012.02.006Search in Google Scholar
[21] Lin P., Wuneng Z., Jianán F., Dequan L., Synchronization and anti-synchronization of new uncertain fractional-order modified unified chaotic systems via novel active pinning control, Commun. Nonlinear. Sci., 2010 15, 3754-3762.10.1016/j.cnsns.2010.01.025Search in Google Scholar
[22] Sachin B., Varsha D. G., Synchronization of different fractional order chaotic systems using active control, Commun. Nonlinear Sci., 2010, 15, 3536-3546.10.1016/j.cnsns.2009.12.016Search in Google Scholar
[23] Al-Sawalha M. M., Noorani M. S. M., Chaos anti-synchronization between two novel different hyperchaotic systems, Chin. Phys. Lett., 2008, 25, 2743.10.1088/0256-307X/25/8/003Search in Google Scholar
[24] Al-Sawalha M. M., Noorani M. S. M., Anti-synchronization between two different hyperchaotic systems, Journal of uncertain systems., 2009, 3, 192-200.Search in Google Scholar
[25] Agrawal S. K., Srivastava M., Das S., Synchronization of fractional order chaotic systems using active control method, Chaos Soliton & Fract., 2012, 45, 737-752.10.1016/j.chaos.2012.02.004Search in Google Scholar
[26] Agrawal S. K., Das S., Function projective synchronization between four dimensional chaotic systems with uncertain parameters using modified adaptive control method, Journal of process control., 2014, 24, 517-530.10.1016/j.jprocont.2014.02.013Search in Google Scholar
[27] Jianrui C., Licheng J., Jianshe W., Xiaodong W., Projective synchronization with different scale factors in a driven-response complex network and its application in image encryption, Nonlinear Anal. Real World Appl., 2010, 11, 3045-3058.10.1016/j.nonrwa.2009.11.003Search in Google Scholar
[28] K. S. Sudheer, M. Sabir, Function projective synchronization in chaotic and hyperchaotic systems through open-plus-closed-loop coupling, Chaos., 2010, 20, 013115-5.10.1063/1.3309019Search in Google Scholar PubMed
[29] Hongyue D., Qingshuang Z., Changhong W., Mingxiang L., Function projective synchronization in coupled chaotic systems, Nonlinear Anal. Real World Appl., 2010, 11, 705-712.10.1016/j.nonrwa.2009.01.016Search in Google Scholar
[30] Zhenbo L., Xiaoshan Z., Generalized function projective synchronization of two different hyperchaotic systems with unknown parameters, Nonlinear Anal. Real World Appl., 2011, 12, 2607-2615.10.1016/j.nonrwa.2011.03.009Search in Google Scholar
[31] Al-Sawalha M. M., Noorani M. S. M., On anti-synchronization of chaotic systems via nonlinear control, Chaos Soliton & Fract., 2009, 42, 170-179.10.1016/j.chaos.2008.11.011Search in Google Scholar
[32] Al-Sawalha M. M., Noorani M. S. M., Anti-synchronization of two hyperchaotic systems via nonlinear control, Commun. Nonlinear. Sci., 2009 14, 3402-3411.10.1016/j.cnsns.2008.12.021Search in Google Scholar
[33] C. K. Ahn, Adaptive H∞ Anti-Synchronization for Time-Delayed Chaotic Neural Networks, Progress of Theoretical Physics, 122, 1402 (2009)10.1143/PTP.122.1391Search in Google Scholar
[34] Choon K. A., An H∞ approach to anti-synchronization for chaotic systems, Phys. Lett. A., 2009, 373, 1729-1733.10.1016/j.physleta.2009.03.032Search in Google Scholar
[35] Hadi T., Erjaee G. H., Phase and anti-phase synchronization of fractional order chaotic systems via active control, Commun. Nonlinear. Sci., 2011, 16, 4079-4088.10.1016/j.cnsns.2011.02.015Search in Google Scholar
[36] A. M. Liapunov, Stability of Motion. Elsevier/Academic Press, New York/London (1966).Search in Google Scholar
[37] Xing Y. W., Jun M. S., Synchronization of the fractional order hyperchaos Lorenz systems with activation feedback control, Commun. Nonlinear. Sci., 2009, 14, 3351-3357.10.1016/j.cnsns.2009.01.010Search in Google Scholar
[38] Yan P. W., Guo. D. W., Synchronization between Fractional-Order and Integer-Order Hyperchaotic Systems via Sliding Mode Controller, Journal of Applied Mathematics, 2013, 5, 151025-5.10.1155/2013/151025Search in Google Scholar
© 2016 M. Mossa Al-Sawalha and Ayman Al-Sawalha, published by De Gruyter Open
This work is licensed under the Creative Commons Attribution-NonCommercial-NoDerivatives 3.0 License.
Articles in the same Issue
- Regular articles
- Speeding of α Decay in Strong Laser Fields
- Regular articles
- Multi-soliton rational solutions for some nonlinear evolution equations
- Regular articles
- Thin film flow of an Oldroyd 6-constant fluid over a moving belt: an analytic approximate solution
- Regular articles
- Bilinearization and new multi-soliton solutions of mKdV hierarchy with time-dependent coefficients
- Regular articles
- Duality relation among the Hamiltonian structures of a parametric coupled Korteweg-de Vries system
- Regular articles
- Modeling the potential energy field caused by mass density distribution with Eton approach
- Regular articles
- Climate Solutions based on advanced scientific discoveries of Allatra physics
- Regular articles
- Investigation of TLD-700 energy response to low energy x-ray encountered in diagnostic radiology
- Regular articles
- Synthesis of Pt nanowires with the participation of physical vapour deposition
- Regular articles
- Quantum discord and entanglement in grover search algorithm
- Regular articles
- On order statistics from nonidentical discrete random variables
- Regular articles
- Charmed hadron photoproduction at COMPASS
- Regular articles
- Perturbation solutions for a micropolar fluid flow in a semi-infinite expanding or contracting pipe with large injection or suction through porous wall
- Regular articles
- Flap motion of helicopter rotors with novel, dynamic stall model
- Regular articles
- Impact of severe cracked germanium (111) substrate on aluminum indium gallium phosphate light-emitting-diode’s electro-optical performance
- Regular articles
- Slow-fast effect and generation mechanism of brusselator based on coordinate transformation
- Regular articles
- Space-time spectral collocation algorithm for solving time-fractional Tricomi-type equations
- Regular articles
- Recent Progress in Search for Dark Sector Signatures
- Regular articles
- Recent progress in organic spintronics
- Regular articles
- On the Construction of a Surface Family with Common Geodesic in Galilean Space G3
- Regular articles
- Self-healing phenomena of graphene: potential and applications
- Regular articles
- Viscous flow and heat transfer over an unsteady stretching surface
- Regular articles
- Spacetime Exterior to a Star: Against Asymptotic Flatness
- Regular articles
- Continuum dynamics and the electromagnetic field in the scalar ether theory of gravitation
- Regular articles
- Corrosion and mechanical properties of AM50 magnesium alloy after modified by different amounts of rare earth element Gadolinium
- Regular articles
- Genocchi Wavelet-like Operational Matrix and its Application for Solving Non-linear Fractional Differential Equations
- Regular articles
- Energy and Wave function Analysis on Harmonic Oscillator Under Simultaneous Non-Hermitian Transformations of Co-ordinate and Momentum: Iso-spectral case
- Regular articles
- Unification of all hyperbolic tangent function methods
- Regular articles
- Analytical solution for the correlator with Gribov propagators
- Regular articles
- A New Algorithm for the Approximation of the Schrödinger Equation
- Regular articles
- Analytical solutions for the fractional diffusion-advection equation describing super-diffusion
- Regular articles
- On the fractional differential equations with not instantaneous impulses
- Topical Issue: Uncertain Differential Equations: Theory, Methods and Applications
- Exact solutions of the Biswas-Milovic equation, the ZK(m,n,k) equation and the K(m,n) equation using the generalized Kudryashov method
- Topical Issue: Uncertain Differential Equations: Theory, Methods and Applications
- Numerical solution of two dimensional time fractional-order biological population model
- Topical Issue: Uncertain Differential Equations: Theory, Methods and Applications
- Rotational surfaces in isotropic spaces satisfying weingarten conditions
- Topical Issue: Uncertain Differential Equations: Theory, Methods and Applications
- Anti-synchronization of fractional order chaotic and hyperchaotic systems with fully unknown parameters using modified adaptive control
- Topical Issue: Uncertain Differential Equations: Theory, Methods and Applications
- Approximate solutions to the nonlinear Klein-Gordon equation in de Sitter spacetime
- Topical Issue: Uncertain Differential Equations: Theory, Methods and Applications
- Stability and Analytic Solutions of an Optimal Control Problem on the Schrödinger Lie Group
- Topical Issue: Recent Developments in Applied and Engineering Mathematics
- Logical entropy of quantum dynamical systems
- Topical Issue: Recent Developments in Applied and Engineering Mathematics
- An efficient algorithm for solving fractional differential equations with boundary conditions
- Topical Issue: Recent Developments in Applied and Engineering Mathematics
- A numerical method for solving systems of higher order linear functional differential equations
- Topical Issue: Recent Developments in Applied and Engineering Mathematics
- Nonlinear self adjointness, conservation laws and exact solutions of ill-posed Boussinesq equation
- Topical Issue: Recent Developments in Applied and Engineering Mathematics
- On combined optical solitons of the one-dimensional Schrödinger’s equation with time dependent coefficients
- Topical Issue: Recent Developments in Applied and Engineering Mathematics
- On soliton solutions of the Wu-Zhang system
- Topical Issue: Recent Developments in Applied and Engineering Mathematics
- Comparison between the (G’/G) - expansion method and the modified extended tanh method
- Topical Issue: Recent Developments in Applied and Engineering Mathematics
- On the union of graded prime ideals
- Topical Issue: Recent Developments in Applied and Engineering Mathematics
- Oscillation criteria for nonlinear fractional differential equation with damping term
- Topical Issue: Recent Developments in Applied and Engineering Mathematics
- A new method for computing the reliability of consecutive k-out-of-n:F systems
- Topical Issue: Recent Developments in Applied and Engineering Mathematics
- A time-delay equation: well-posedness to optimal control
- Topical Issue: Recent Developments in Applied and Engineering Mathematics
- Numerical solutions of multi-order fractional differential equations by Boubaker polynomials
- Topical Issue: Recent Developments in Applied and Engineering Mathematics
- Laplace homotopy perturbation method for Burgers equation with space- and time-fractional order
- Topical Issue: Recent Developments in Applied and Engineering Mathematics
- The calculation of the optical gap energy of ZnXO (X = Bi, Sn and Fe)
- Special Issue: Advanced Computational Modelling of Nonlinear Physical Phenomena
- Analysis of time-fractional hunter-saxton equation: a model of neumatic liquid crystal
- Special Issue: Advanced Computational Modelling of Nonlinear Physical Phenomena
- A certain sequence of functions involving the Aleph function
- Special Issue: Advanced Computational Modelling of Nonlinear Physical Phenomena
- On negacyclic codes over the ring ℤp + uℤp + . . . + uk + 1 ℤp
- Special Issue: Advanced Computational Modelling of Nonlinear Physical Phenomena
- Solitary and compacton solutions of fractional KdV-like equations
- Special Issue: Advanced Computational Modelling of Nonlinear Physical Phenomena
- Regarding on the exact solutions for the nonlinear fractional differential equations
- Special Issue: Advanced Computational Modelling of Nonlinear Physical Phenomena
- Non-local Integrals and Derivatives on Fractal Sets with Applications
- Special Issue: Advanced Computational Modelling of Nonlinear Physical Phenomena
- On the solutions of electrohydrodynamic flow with fractional differential equations by reproducing kernel method
- Special issue on Information Technology and Computational Physics
- On uninorms and nullnorms on direct product of bounded lattices
- Special issue on Information Technology and Computational Physics
- Phase-space description of the coherent state dynamics in a small one-dimensional system
- Special issue on Information Technology and Computational Physics
- Automated Program Design – an Example Solving a Weather Forecasting Problem
- Special issue on Information Technology and Computational Physics
- Stress - Strain Response of the Human Spine Intervertebral Disc As an Anisotropic Body. Mathematical Modeling and Computation
- Special issue on Information Technology and Computational Physics
- Numerical solution to the Complex 2D Helmholtz Equation based on Finite Volume Method with Impedance Boundary Conditions
- Special issue on Information Technology and Computational Physics
- Application of Genetic Algorithm and Particle Swarm Optimization techniques for improved image steganography systems
- Special issue on Information Technology and Computational Physics
- Intelligent Chatter Bot for Regulation Search
- Special issue on Information Technology and Computational Physics
- Modeling and optimization of Quality of Service routing in Mobile Ad hoc Networks
- Special issue on Information Technology and Computational Physics
- Resource management for server virtualization under the limitations of recovery time objective
- Special issue on Information Technology and Computational Physics
- MODY – calculation of ordered structures by symmetry-adapted functions
- Special issue on Information Technology and Computational Physics
- Survey of Object-Based Data Reduction Techniques in Observational Astronomy
- Special issue on Information Technology and Computational Physics
- Optimization of the prediction of second refined wavelet coefficients in electron structure calculations
- Special Issue on Advances on Modelling of Flowing and Transport in Porous Media
- Droplet spreading and permeating on the hybrid-wettability porous substrates: a lattice Boltzmann method study
- Special Issue on Advances on Modelling of Flowing and Transport in Porous Media
- POD-Galerkin Model for Incompressible Single-Phase Flow in Porous Media
- Special Issue on Advances on Modelling of Flowing and Transport in Porous Media
- Effect of the Pore Size Distribution on the Displacement Efficiency of Multiphase Flow in Porous Media
- Special Issue on Advances on Modelling of Flowing and Transport in Porous Media
- Numerical heat transfer analysis of transcritical hydrocarbon fuel flow in a tube partially filled with porous media
- Special Issue on Advances on Modelling of Flowing and Transport in Porous Media
- Experimental Investigation on Oil Enhancement Mechanism of Hot Water Injection in tight reservoirs
- Special Issue on Research Frontier on Molecular Reaction Dynamics
- Role of intramolecular hydrogen bonding in the excited-state intramolecular double proton transfer (ESIDPT) of calix[4]arene: A TDDFT study
- Special Issue on Research Frontier on Molecular Reaction Dynamics
- Hydrogen-bonding study of photoexcited 4-nitro-1,8-naphthalimide in hydrogen-donating solvents
- Special Issue on Research Frontier on Molecular Reaction Dynamics
- The Interaction between Graphene and Oxygen Atom
- Special Issue on Research Frontier on Molecular Reaction Dynamics
- Kinetics of the austenitization in the Fe-Mo-C ternary alloys during continuous heating
- Special Issue: Functional Advanced and Nanomaterials
- Colloidal synthesis of Culn0.75Ga0.25Se2 nanoparticles and their photovoltaic performance
- Special Issue: Functional Advanced and Nanomaterials
- Positioning and aligning CNTs by external magnetic field to assist localised epoxy cure
- Special Issue: Functional Advanced and Nanomaterials
- Quasi-planar elemental clusters in pair interactions approximation
- Special Issue: Functional Advanced and Nanomaterials
- Variable Viscosity Effects on Time Dependent Magnetic Nanofluid Flow past a Stretchable Rotating Plate
Articles in the same Issue
- Regular articles
- Speeding of α Decay in Strong Laser Fields
- Regular articles
- Multi-soliton rational solutions for some nonlinear evolution equations
- Regular articles
- Thin film flow of an Oldroyd 6-constant fluid over a moving belt: an analytic approximate solution
- Regular articles
- Bilinearization and new multi-soliton solutions of mKdV hierarchy with time-dependent coefficients
- Regular articles
- Duality relation among the Hamiltonian structures of a parametric coupled Korteweg-de Vries system
- Regular articles
- Modeling the potential energy field caused by mass density distribution with Eton approach
- Regular articles
- Climate Solutions based on advanced scientific discoveries of Allatra physics
- Regular articles
- Investigation of TLD-700 energy response to low energy x-ray encountered in diagnostic radiology
- Regular articles
- Synthesis of Pt nanowires with the participation of physical vapour deposition
- Regular articles
- Quantum discord and entanglement in grover search algorithm
- Regular articles
- On order statistics from nonidentical discrete random variables
- Regular articles
- Charmed hadron photoproduction at COMPASS
- Regular articles
- Perturbation solutions for a micropolar fluid flow in a semi-infinite expanding or contracting pipe with large injection or suction through porous wall
- Regular articles
- Flap motion of helicopter rotors with novel, dynamic stall model
- Regular articles
- Impact of severe cracked germanium (111) substrate on aluminum indium gallium phosphate light-emitting-diode’s electro-optical performance
- Regular articles
- Slow-fast effect and generation mechanism of brusselator based on coordinate transformation
- Regular articles
- Space-time spectral collocation algorithm for solving time-fractional Tricomi-type equations
- Regular articles
- Recent Progress in Search for Dark Sector Signatures
- Regular articles
- Recent progress in organic spintronics
- Regular articles
- On the Construction of a Surface Family with Common Geodesic in Galilean Space G3
- Regular articles
- Self-healing phenomena of graphene: potential and applications
- Regular articles
- Viscous flow and heat transfer over an unsteady stretching surface
- Regular articles
- Spacetime Exterior to a Star: Against Asymptotic Flatness
- Regular articles
- Continuum dynamics and the electromagnetic field in the scalar ether theory of gravitation
- Regular articles
- Corrosion and mechanical properties of AM50 magnesium alloy after modified by different amounts of rare earth element Gadolinium
- Regular articles
- Genocchi Wavelet-like Operational Matrix and its Application for Solving Non-linear Fractional Differential Equations
- Regular articles
- Energy and Wave function Analysis on Harmonic Oscillator Under Simultaneous Non-Hermitian Transformations of Co-ordinate and Momentum: Iso-spectral case
- Regular articles
- Unification of all hyperbolic tangent function methods
- Regular articles
- Analytical solution for the correlator with Gribov propagators
- Regular articles
- A New Algorithm for the Approximation of the Schrödinger Equation
- Regular articles
- Analytical solutions for the fractional diffusion-advection equation describing super-diffusion
- Regular articles
- On the fractional differential equations with not instantaneous impulses
- Topical Issue: Uncertain Differential Equations: Theory, Methods and Applications
- Exact solutions of the Biswas-Milovic equation, the ZK(m,n,k) equation and the K(m,n) equation using the generalized Kudryashov method
- Topical Issue: Uncertain Differential Equations: Theory, Methods and Applications
- Numerical solution of two dimensional time fractional-order biological population model
- Topical Issue: Uncertain Differential Equations: Theory, Methods and Applications
- Rotational surfaces in isotropic spaces satisfying weingarten conditions
- Topical Issue: Uncertain Differential Equations: Theory, Methods and Applications
- Anti-synchronization of fractional order chaotic and hyperchaotic systems with fully unknown parameters using modified adaptive control
- Topical Issue: Uncertain Differential Equations: Theory, Methods and Applications
- Approximate solutions to the nonlinear Klein-Gordon equation in de Sitter spacetime
- Topical Issue: Uncertain Differential Equations: Theory, Methods and Applications
- Stability and Analytic Solutions of an Optimal Control Problem on the Schrödinger Lie Group
- Topical Issue: Recent Developments in Applied and Engineering Mathematics
- Logical entropy of quantum dynamical systems
- Topical Issue: Recent Developments in Applied and Engineering Mathematics
- An efficient algorithm for solving fractional differential equations with boundary conditions
- Topical Issue: Recent Developments in Applied and Engineering Mathematics
- A numerical method for solving systems of higher order linear functional differential equations
- Topical Issue: Recent Developments in Applied and Engineering Mathematics
- Nonlinear self adjointness, conservation laws and exact solutions of ill-posed Boussinesq equation
- Topical Issue: Recent Developments in Applied and Engineering Mathematics
- On combined optical solitons of the one-dimensional Schrödinger’s equation with time dependent coefficients
- Topical Issue: Recent Developments in Applied and Engineering Mathematics
- On soliton solutions of the Wu-Zhang system
- Topical Issue: Recent Developments in Applied and Engineering Mathematics
- Comparison between the (G’/G) - expansion method and the modified extended tanh method
- Topical Issue: Recent Developments in Applied and Engineering Mathematics
- On the union of graded prime ideals
- Topical Issue: Recent Developments in Applied and Engineering Mathematics
- Oscillation criteria for nonlinear fractional differential equation with damping term
- Topical Issue: Recent Developments in Applied and Engineering Mathematics
- A new method for computing the reliability of consecutive k-out-of-n:F systems
- Topical Issue: Recent Developments in Applied and Engineering Mathematics
- A time-delay equation: well-posedness to optimal control
- Topical Issue: Recent Developments in Applied and Engineering Mathematics
- Numerical solutions of multi-order fractional differential equations by Boubaker polynomials
- Topical Issue: Recent Developments in Applied and Engineering Mathematics
- Laplace homotopy perturbation method for Burgers equation with space- and time-fractional order
- Topical Issue: Recent Developments in Applied and Engineering Mathematics
- The calculation of the optical gap energy of ZnXO (X = Bi, Sn and Fe)
- Special Issue: Advanced Computational Modelling of Nonlinear Physical Phenomena
- Analysis of time-fractional hunter-saxton equation: a model of neumatic liquid crystal
- Special Issue: Advanced Computational Modelling of Nonlinear Physical Phenomena
- A certain sequence of functions involving the Aleph function
- Special Issue: Advanced Computational Modelling of Nonlinear Physical Phenomena
- On negacyclic codes over the ring ℤp + uℤp + . . . + uk + 1 ℤp
- Special Issue: Advanced Computational Modelling of Nonlinear Physical Phenomena
- Solitary and compacton solutions of fractional KdV-like equations
- Special Issue: Advanced Computational Modelling of Nonlinear Physical Phenomena
- Regarding on the exact solutions for the nonlinear fractional differential equations
- Special Issue: Advanced Computational Modelling of Nonlinear Physical Phenomena
- Non-local Integrals and Derivatives on Fractal Sets with Applications
- Special Issue: Advanced Computational Modelling of Nonlinear Physical Phenomena
- On the solutions of electrohydrodynamic flow with fractional differential equations by reproducing kernel method
- Special issue on Information Technology and Computational Physics
- On uninorms and nullnorms on direct product of bounded lattices
- Special issue on Information Technology and Computational Physics
- Phase-space description of the coherent state dynamics in a small one-dimensional system
- Special issue on Information Technology and Computational Physics
- Automated Program Design – an Example Solving a Weather Forecasting Problem
- Special issue on Information Technology and Computational Physics
- Stress - Strain Response of the Human Spine Intervertebral Disc As an Anisotropic Body. Mathematical Modeling and Computation
- Special issue on Information Technology and Computational Physics
- Numerical solution to the Complex 2D Helmholtz Equation based on Finite Volume Method with Impedance Boundary Conditions
- Special issue on Information Technology and Computational Physics
- Application of Genetic Algorithm and Particle Swarm Optimization techniques for improved image steganography systems
- Special issue on Information Technology and Computational Physics
- Intelligent Chatter Bot for Regulation Search
- Special issue on Information Technology and Computational Physics
- Modeling and optimization of Quality of Service routing in Mobile Ad hoc Networks
- Special issue on Information Technology and Computational Physics
- Resource management for server virtualization under the limitations of recovery time objective
- Special issue on Information Technology and Computational Physics
- MODY – calculation of ordered structures by symmetry-adapted functions
- Special issue on Information Technology and Computational Physics
- Survey of Object-Based Data Reduction Techniques in Observational Astronomy
- Special issue on Information Technology and Computational Physics
- Optimization of the prediction of second refined wavelet coefficients in electron structure calculations
- Special Issue on Advances on Modelling of Flowing and Transport in Porous Media
- Droplet spreading and permeating on the hybrid-wettability porous substrates: a lattice Boltzmann method study
- Special Issue on Advances on Modelling of Flowing and Transport in Porous Media
- POD-Galerkin Model for Incompressible Single-Phase Flow in Porous Media
- Special Issue on Advances on Modelling of Flowing and Transport in Porous Media
- Effect of the Pore Size Distribution on the Displacement Efficiency of Multiphase Flow in Porous Media
- Special Issue on Advances on Modelling of Flowing and Transport in Porous Media
- Numerical heat transfer analysis of transcritical hydrocarbon fuel flow in a tube partially filled with porous media
- Special Issue on Advances on Modelling of Flowing and Transport in Porous Media
- Experimental Investigation on Oil Enhancement Mechanism of Hot Water Injection in tight reservoirs
- Special Issue on Research Frontier on Molecular Reaction Dynamics
- Role of intramolecular hydrogen bonding in the excited-state intramolecular double proton transfer (ESIDPT) of calix[4]arene: A TDDFT study
- Special Issue on Research Frontier on Molecular Reaction Dynamics
- Hydrogen-bonding study of photoexcited 4-nitro-1,8-naphthalimide in hydrogen-donating solvents
- Special Issue on Research Frontier on Molecular Reaction Dynamics
- The Interaction between Graphene and Oxygen Atom
- Special Issue on Research Frontier on Molecular Reaction Dynamics
- Kinetics of the austenitization in the Fe-Mo-C ternary alloys during continuous heating
- Special Issue: Functional Advanced and Nanomaterials
- Colloidal synthesis of Culn0.75Ga0.25Se2 nanoparticles and their photovoltaic performance
- Special Issue: Functional Advanced and Nanomaterials
- Positioning and aligning CNTs by external magnetic field to assist localised epoxy cure
- Special Issue: Functional Advanced and Nanomaterials
- Quasi-planar elemental clusters in pair interactions approximation
- Special Issue: Functional Advanced and Nanomaterials
- Variable Viscosity Effects on Time Dependent Magnetic Nanofluid Flow past a Stretchable Rotating Plate