
A convergence analysis of SOR iterative methods for linear systems with weak H-matrices
-
Cheng-yi Zhang
 ,
Zichen Xue
,
Zichen Xue

Abstract
It is well known that SOR iterative methods are convergent for linear systems, whose coefficient matrices are strictly or irreducibly diagonally dominant matrices and strong H-matrices (whose comparison matrices are nonsingular M-matrices). However, the same can not be true in case of those iterative methods for linear systems with weak H-matrices (whose comparison matrices are singular M-matrices). This paper proposes some necessary and sufficient conditions such that SOR iterative methods are convergent for linear systems with weak H-matrices. Furthermore, some numerical examples are given to demonstrate the convergence results obtained in this paper.
1 Introduction
In this paper we consider the solution methods for the system of n linear equations
where A = (aij) ∈ Cn×n and is nonsingular, b, x ∈ Cn and x unknown.
In order to solve system (1) by iterative methods, the coefficient matrix A = (Aij) ∈ Cn×n is split into
where M ∈ Cn×n is nonsingular and N ∈ Cn×n. Then, the general form of iterative methods for (1) can be described as follows:
The matrix H = M−1N is called the iterative matrix of the iteration (3). It is well-known that (3) converges for any given x(0) if and only if ρ(H) < 1 (see [1–5]), where ρ(H) denotes the spectral radius of the matrix H. Thus, to establish the convergence results of iterative methods, we mainly study the spectral radius of the iteration matrix in iteration (3).
For simplicity, we let
where I is the identity matrix, L and U are strictly lower and strictly upper triangular, respectively. According to the standard decomposition (4), the iteration matrices for SOR iterative methods of (1) are listed in the following.
The forward, backward and symmetric SOR methods (FSOR, BSOR and SSOR) iteration matrices are
and
where ω ∈ (0, 1) is the overrelaxation parameter.
Recently, the class of strong H-matrices including strictly or irreducibly diagonally dominant matrices (whose comparison matrices are nonsingular M-matrices) has been extended to encompass a wider set, known as the set of general H−matrices (whose comparison matrices are M-matrices). In a recent paper, a partition of the n × n general H−matrix set Hn was obtained in [6–8]. Here, we give a different partition: general H−matrix set Hn are partitioned into two mutually exclusive classes: the strong class,
Assume that either A or B is the coefficient matrix of linear system (1), where
It is verified that both A and B are weak H−matrices and not strong H−matrices, since their comparison matrices are both singular M−matrices. How can we get the convergence on FSOR-, BSOR- and SSOR iterative methods for linear systems with this class of matrices without direct computations?
In last years, Zhang et al. in [28] and Zhang et al. in [29] studied the convergence of Jacobli, Gauss-Seidel and symmetric Gauss-Seidel iterative methods for the linear systems with nonstrictly diagonally dominant matrices and general H−matrices, and established some significant results. In this paper the convergence of FSOR-, BSOR- and SSOR- iterative method will be studied for the linear systems with weak H−matrices and some necessary and sufficient conditions are proposed, such that these iterative methods are convergent for the linear systems with this class of matrices. Then some numerical examples are given to demonstrate the convergence results obtained in this paper.
The paper is organized as follows. Some notations and preliminary results about general H-matrices are given in Section 2. The main results of this paper are given in Section 3, where we give some necessary and sufficient conditions on convergence for FSOR-, BSOR- and SSOR- iterative methods of linear systems with weak H-matrices. In Section 4, some numerical examples are given to demonstrate the convergence results obtained in this paper. Future work is given in Section 4.
2 Preliminaries
In this section we give some notations and preliminary results relating to the special matrices that are used in this paper.
ℂm×n (ℝm×n) will be used to denote the set of all m × n complex (real) matrices. ℤ denotes the set of all integers. Let α ⊆ 〈n〉 = {1, 2,...,n} ⊂ ℤ. For nonempty index sets α, β ⊆ 〈n〉, A(α, β) is the submatrix of A ∈ ℂn×n with row indices in α and column indices in β. The submatrix A(α, α) is abbreviated to A(α). Let A ∈ ℂn×n, α ⊂ 〈n〉 and α' = 〈n〉 − α. If A(α) is nonsingular, the matrix
Let A = (aij) ∈ ℂm×n and B = (bij) ∈ ℂm×n, A ° B = (aij bij) ∈ ℂm×n denotes the Hadamard product of the matrices A and B. A matrix A = (aij) ∈ ℝn×n is called nonnegative if aij ≥ 0 for all i, j ∈ 〈n〉. A matrix A = (aij) ∈ ℝn×nis called a Z−matrix if aij ≤ 0 for all ii = j. We will use Zn to denote the set of all n × n Z−matrices. A matrix A = (aij) ∈ Znis called an M−matrix if A can be expressed in the form A = sI − B, where B ≥ 0, and s ≥ ρ(B), the spectral radius of B. If s > ρ(B), A is called a nonsingular M−matrix; if s= ρ(B), A is called a singular M−matrix. Mn,
The comparison matrix of a given matrix A = (aij) ∈ ℂn×n, denoted by μ(A) = (μij), is defined by
It is clear that μ(A) ∈ Zn for a matrix A ∈ ℂn×n. The set of equimodular matrices associated with A, denoted by ω(A) = {B ∈ ℂn×n: μ(B) = μ(A)}. Note that both A and μ(A) are in ω(A). A matrix A = (aij) ∈ ℂn×n is called a general H−matrix if μ(A) ∈ Mn (See [1]). If
For n ≥ 2, an n × n complex matrix A is reducible if there exists an n × n permutation matrix P such that
where A11 is an r × r submatrix and A22 is an (n − r) × (n − r) submatrix, where 1 ≤ r < n. If no such permutation matrix exists, then A is called irreducible. If A is a 1 × 1 complex matrix, then A is irreducible if its single entry is nonzero, and reducible otherwise.
A matrix A ∈ ℂn×nis called diagonally dominant by row if
Dn(SDn, IDn) and DEn will be used to denote the sets of all n × n (strictly, irreducibly) diagonally dominant matrices and the set of all n × n diagonally equipotent matrices, respectively.
A matrix A ∈ ℂn×nis called generalized diagonally dominant if there exist positive constants αi, i ∈ 〈n〉, such that
We denote the sets of all n × n generalized (strictly) diagonally dominant matrices and the set of all n × n generalized diagonally equipotent matrices by GDn(GSDn) and GDEn, respectively.
(See [30–32]). Let A ∈ Dn(GDn). Then
(See [6]). GDn ⊂ Hn
(See [6]). Let A ∈ ℂn×nbe irreducible. Then A ∈ Hn if and only if A ∈ GDn
More importantly, under the condition of "reducibility", we have the following conclusion.
(See [6, 29]). Let A ∈ ℂn × nbe reducible. Then A ∈ Hn if and only if in the Frobenius normal form of A
(See [6, 29]). A matrix
The following definitions and lemmas come from [28, 29].
Let Eiθ = (eiθrs) ∈ ℂn×n, whereeiθrs = cos⊆rs + i sin θrs,
1. θrs+ θsr = 2kβ holds for all r, s ∈ 〈n〉, r ≠ s, where k ∈ ℤ;
2. θrs−θrt = θts + (2k + 1)π holds for all r, s, t ∈ 〈n〉 and r ≠ s, r ≠ t, t ≠ s, where k ∈ ℤ;
3. θrr = 0 for all r ∈ 〈n〉.
Any complex matrix A = (ars) ∈ ℂn × n has the following form:
Let a matrix A = DA − LA − UA = (ars) ∈ ℂn ×n with DA = diag(a11, a22, ... , ann). Then
A matrix
3 Main results
In numerical linear algebra, the successive overrelaxation iterative method, simultaneously introduced by Frankel (1950) [33] and Young (1950) [34], is a famous iterative method used to solve a linear system of equations. This iterative method is also called the accelerate Liebmann method by Frankel (1950) [33] and the other many subsequent researchers. Kahan (1958) [35] calls it the extrapolated Gauss-Seidel method. It is often called the method of systematic overrelaxation. Frankel showed that for the numerical solutation of the Dirichlet problem for a rectangle, successive overrelaxation iterative method gave substantially larger (by an order of magnitude) asymptotic rates of convergence than those for the point Jacobi and point Gauss-Seidel iterative methods with suitable chosen relaxation factor. Young (1950) [34] and Young (1954) [36] showed that these conclusions held more generally for matrices satisfying his definition of propertly A, and that these results could be rigorously applied to the iterative solution of matrix equations arising from discrete approximations to a large class of elliptic partial differential equations for general regions.
Later, this iterative method was developed as three iterative methods, i.e., the forward, backward and symmetric successive overrelaxation (FSOR-, BSOR- and SSOR-) iterative methods. Though these iterative methods can be applied to any matrix with non-zero elements on the diagonals, convergence is only guaranteed if the matrix is strictly or irreducibly diagonally dominant matrix, Hermitian positive definite matrix, strong H−matrix and consistently ordered p-cyclic matrix. Some classic results on convergence of SOR iterative methods are as follows:
(See [13–15, 23]). Let A ∈ SDn ∪ IDn. Then ρ(HFSOR) < 1, ρ(HBSOR) < 1 and ρ(HSSOR) < 1, where HFSOR, HBSOR and HSSOR are defined in (5) , (6) and (7) , respectively, and therefore the sequence {x(i)} generated by the FSOR-, BSOR- and SSOR-scheme (3) , respectively, converges to the unique solution of (1) for any choice of the initial guess x(0).
(See [37]). Let
(See [4, 5, 38]). Let A ∈ ℂn × nbe a Hermitian positive definite matrix. Then the sequence {x(i)} generated by the FSOR-, BSOR- and SSOR-scheme (3) , respectively, converges to the unique solution of (1) for any choice of the initial guess x(0).
In this section, we mainly study convergence of SOR iterative methods for the linear systems with weak H-matrices.
Let A = I − L− U ∈ DE nbe irreducible. Then for ω ∈ (0, 1), ρ(HFSOR(ω)) < 1 and ρ(HBSOR(ω)) < 1, i.e. the sequence {x(i))} generated by the FSOR and BSOR iterative schemes (5) and (6) converges to the unique solution of (1) for any choice of the initial guess x(0)if and only if A
The sufficiency can be proved by contradiction. We assume that there exists an eigenvalue λ of HFSOR such that |λ| ≥ 1. According to Equality (5),
Since |λ ≥ 1, λ − 1 + ω ≠ 0. Hence, equality (17) yields
i.e.
is singular. Set λ = μeiθ with μ ≥ 1 and θ ∈ R. Then 1 − cosθ ≥ 0, μ − 1 ≥ 0 and μ2 − 1 ≥ 0. Again, ω ∈ (0, 1) shows 1 − ω > 0. Therefore, we have
and
This shows that
Since A = I − L− U ∈ DEn is irreducible, both L ≠ 0 and U ≠ 0. As a result, (19) and (22) indicate that A(λ, ω) ∈ Dn and irreducible. Again, since A(λ, ω) is singular and hence
Since A = I − L− U ∈ DE n,
Because of |λ ≥ 1 and ω ∈ (0,1), the latter equality of (25) implies |λ| = 1. As a result, (25) and (19) show A(λ, ω) = I − L− U = A. From (23), it is easy to see
The following will prove the necessity by contradiction. Assume that
Hence,
Sice A = I − L− U ∈ DE n and is irreducible, Lemma 2.4 shows that
In the same way, we can prove that for ω ∈ (0,1), BSOR-method converges, i.e. ρ(HBSOR(ω)) < 1 if and only if
Let A = I − L − U = (aij) ∈ Dn with aii ≠ 0 for all i ∈ 〈n〉. Then for ω ∈ (0, 1), ρ(HFSOR(ω)) < 1 and ρ(HBSOR(ω) < 1, i.e. the sequence {x(i))} generated by the FSOR and BSOR iterative schemes (5) and (6) converges to the unique solution of (1) for any choice of the initial guess x(0)if and only if A is nonsingular.
The conclusion of this theorem is not difficult to be obtained form Lemma 2.1 2, Theorem 3.1 and Theorem 3.4. □
In what follows we will propose the convergence result for SSOR iterative method for linear system with weak H-matrices including nonstrictly diagonally dominant matrices. Firstly, the following lemma will be given for the convenience of the proof.
([32]). Let
Let A = I − L − U ∈ DEn be irreducible. Then for ω ∈ (0, 1), ρ(HSOR(ω)) < 1, i.e. the sequence {x(i))} generated by the SSOR iterative schemes (7) converges to the unique solution of (1) for any choice of the initial guess x(0)if and only if A
The sufficiency can be proved by contradiction. We assume that there exists an eigenvalue λ of HSSOR such that |λ| ≥ 1. According to equalities (5), (6) and (7),
Equality (28) gives
i.e.
is singular. Let R = I − ωL, S = λ.I − ωU) , T = λ−1[(1 − ω)I + ωL], V = (1 − ω)I + ωU and
Then, B(λ, ω) = ℬ/R is the Schur complement of ℬ with respect to the principal submatrix R. Since B(λ, ω) = ℬ/R is singular, Lemma 3.6 shows that ℬ is also singular. Again since A is irreducible, both L ≠ 0 and U ≠ 0. As a result, ℬ is also irreducible. Since A = I − L − U = (aij) ∈ DE n with unit diagonal entries,
Thus, for all ω ∈ (0, 1) and |λ ≥ 1, we have that both
and
hold for all i ∈ N = {1, 2,..., n}. Immediately, we obtain
(33) shows that ℬ ∈ D2n. Again, ℬ is irreducible and singular, and hence Lemma 2.4 shows that
The latter two equalities of (34) indicate that θ = 2kβ; where k is an integer and thus λ = ei2kβ = 1, and there exists an n × n unitary diagonal matrix D such that D−1AD = I − |L| − |U|, i.e.
The following will prove the necessity by contradiction. Assume that
Thus,
Set C(ω) = (I − ω |U|)− [(1−ω)I + ω|L|](I− ω |L|)−1 [(1−ω)I + ω |U|] and let R̂ = I − ω |L|, Ŝ = I − ω |U|, T̂ = (1 − ω)I + ω |L|, V̂ = (1 − ω)I + ω |U| and
Then, C(ω) = ℬ̂/R̂ is the Schur complement of ℬ̂ with respect to the principal submatrix R̂. (33) and (37) show
(36) gives det(I − HSSOR) = 0, which shows that 1 is an eigenvalue of HSSOR(ω). Then, we have that ρ(HSSOR(ω)) ≥ 1, i.e. SSOR-method doesn’t converge. This is a contradiction. Thus, the assumption is incorrect and
Let A = I − L − U = (aij) ∈ Dn with aii ≠ 0 for all i ∈ 〈n〉. Then for ω ∈ (0, 1), ρ(HSSOR(ω)) < 1, i.e. the sequence {x(i)} generated by the SSOR iterative schemes (7) converges to the unique solution of (1) for any choice of the initial guess x(0)if and only if A is nonsingular.
The conclusion of this theorem is easy to be obtained form Lemma 2.1 2, Theorem 3.1 and Theorem 3. 7. □
Let
Since
In the same way, we can get
from (6). Since
Let
From (5), (6), (7), (38) and (39),
Therefore, similarly as in the proof of Theorem 3. 9, we have with Theorem 3.7 that for ω ∈ (0, 1), ρ(HSSOR(ω)) = ρ(ĤSSOR(ω)) < 1 i.e. the sequence {x(i)} generated by the SSOR iterative schemes (7) converges to the unique solution of (1) for any choice of the initial guess x(0) if and only if
Let
If
Since Rii ∈ GDEn is irreducible, Theorem 3.9 shows that for ω ∈ (0, 1), if
Let us prove the sufficiency. Assume that A is nonsingular, then each diagonal square block Rii in the Frobenius normal from (15) of A is nonsingular for all i ∈ 〈n〉. Since
Similar to the proof of Theorem 3.1 1, the conclusion of this theorem is easy to be obtained form Theorem 3.1, Theorem 3.2 and Theorem 3.1 0. □
4 Numerical examples
In this section, some numerical examples are given to demonstrate the convergence results obtained in this paper.
Let the coefficient matrix A of linear system (1) be given by the following n × n matrix
It is easy to see that An ∈ DEn is irreducible. Since
where
it follows from Lemma 2.11 that
i.e. the sequence {x(i))} generated by the FSOR-, BSOR- and SSOR-iterative schemes (5), (6) and (7) converges to the unique solution of (1) for any choice of the initial guess x(0).
In what follows, the computations on the spectral radii ρ1 = ρ(HFSOR(ω)) , ρ2 = ρ(HBSOR(ω)) and ρ3 = ρ(HSSOR(ω)) of FSOR-, BSOR- and SSOR-iterative matrices for A100 were performed on PC computer with Matlab 7.0 to verify that the results above are true. The computational results are shown in Table 1.
The comparison of spectral radii of FSOR-, BSOR- and SSOR-iterative matrices with different ω
| ω | 0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| ρ1 | 1 | 0.900 | 0.800 | 0.702 | 0.606 | 0.514 | 0.430 | 0.358 | 0.514 | 0.890 | 1.284 |
| ρ2 | 1 | 0.900 | 0.800 | 0.702 | 0.606 | 0.514 | 0.430 | 0.358 | 0.514 | 0.890 | 1.284 |
| ρ3 | 1 | 0.808 | 0.624 | 0.449 | 0.310 | 0.119 | 0.324 | 0.780 | 1.586 | 3.457 | 1.640 |
It is shown in Table 1 and Fig. 1 that: (i) the changes of ρ(HFSOR(ω)) and ρ(HBSOR(ω)) are identical with ω increasing. They gradually decrease from 1 to 0.358 with ω increasing from 0 to 0.7 while they gradually increase from 0.358 to 1.284 with ω increasing from 0.7 to 1. This shows the optimal value of ω should be ωopt ∈ (0:50; 0:80) such that the SOR iterative method converges faster to the unique solution of (1) for any choice of the initial guess x0.
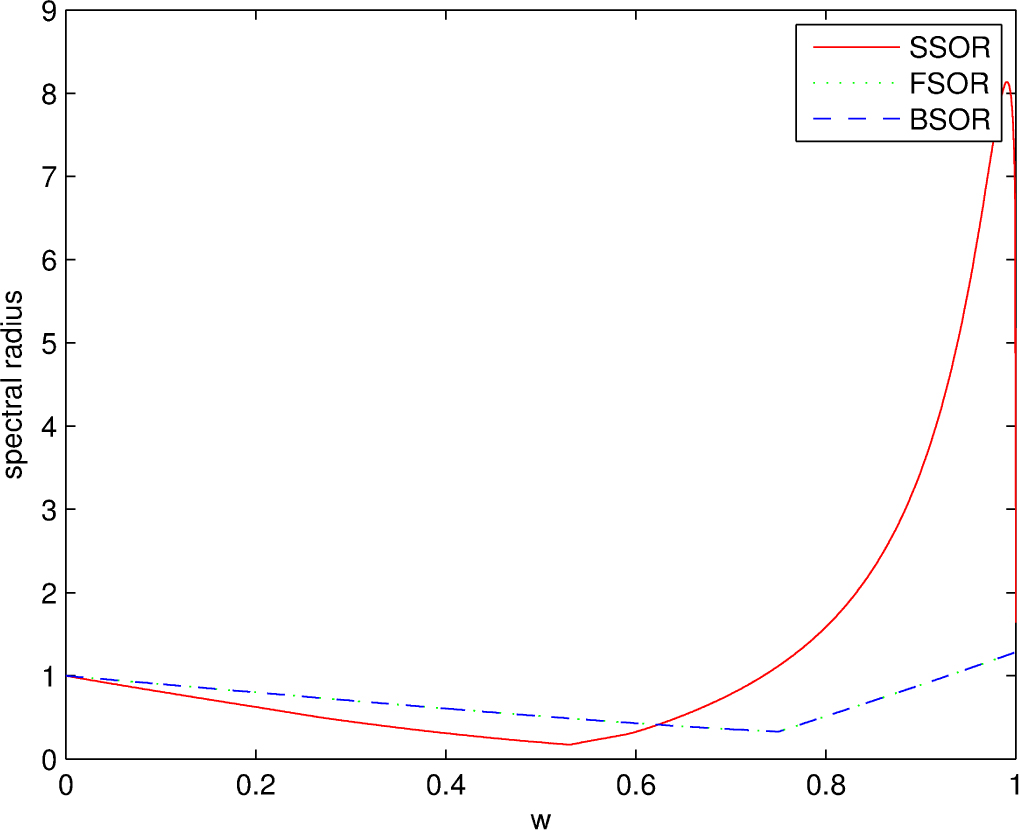
The change of spectral radii of FSOR-, BSOR- and SSOR-iterative matrices with different ω.
(ii) ρ(HSSOR(ω)) performs better than ρ(HFSOR(ω)) and (HBSOR(ω)). It decreases quickly from 1 to 0.119 with ω increasing from 0 to 0.5 while it increases fast from 0.119 to 1.640 with ω increasing from 0.5 to 1. The optimal value of ω should be ωopt ∈ (0:40; 0:60) such that the SOR iterative method converges faster to the unique solution of (1) for any choice of the initial guess x0. It follows from Table 1 and Fig. 1 that SSOR iterative method is superior to the other two SOR iterative methods.
Let the coefficient matrix A of linear system (1) be given by the following 6 × 6 matrix
Although A ∈ DE6 are reducible, there is not any principal submatrix Ak(k < 6) in A such that
i.e. the sequence {x(i))} generated by the FSOR-, BSOR- and SSOR-iterative schemes (5), (6) and (7) converges to the unique solution of (1) for any choice of the initial guess x(0).
The computations on Matlab 7.0 of PC yield some comparison results on the spectral radius of SSOR iterative matrices, see Table 2.
The comparison of spectral radii of FSOR-, BSOR- and SSOR-iterative matrices with different ω
| ω | 0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| ρ1 | 1 | 0.924 | 0.846 | 0.765 | 0.679 | 0.620 | 0.573 | 0.527 | 0.510 | 0.788 | 1.092 |
| ρ2 | 1 | 0.924 | 0.849 | 0.774 | 0.700 | 0.628 | 0.561 | 0.498 | 0.449 | 0.712 | 1.000 |
| ρ3 | 1 | 0.849 | 0.697 | 0.543 | 0.417 | 0.332 | 0.351 | 0.342 | 0.443 | 0.532 | 0.585 |
It is shown in Table 2 and Fig. 2 that (i) the change of ρ(HFSOR(ω)) is similar to the one of ρ(HBSOR(ω)). They gradually decrease to their minimal values then gradually increase from their minimal values with ω increasing from 0 to 1. This shows the optimal value of ω for FSOR- and BSOR-iterative method should be ωopt ∈ (0:70; 0:90). But ρ(HFSOR(ωopt)) > ρ(HFSOR(ωopt)) shows that the BSOR iterative method converges much faster than the FSOR does to the unique solution of (1) for any choice of the initial guess x0.

The change of spectral radii of FSOR-, BSOR- and SSOR-iterative matrices with different ω
(ii) Similarly as in Example 1, ρ(HSSOR(ω)) performs better than ρ(HFSOR(ω)) and ρ(HBSOR(ω)). It decreases quickly from 1 to 0.332 with ω increasing from 0 to 0.5 while it quickly increases near about ω = 0.5 and then decreases gradually to 0.342 at ω = 0.7. Finally, it increases quickly from 0.342 to 0.585 with ω increasing from 0.7 to 1. The optimal value of ω should be ωopt ∈ (0.40, 0.60) such that the SOR iterative method converges faster to the unique solution of (1) for any choice of the initial guess x0. It follows from Table 2 and Fig. 2 that SSOR iterative method is superior to the other two SOR iterative methods.
5 Further work
In this paper some necessary and sufficient conditions are proposed such that SOR iterative methods, including FSOR, BSOR and SSOR iterative methods, are convergent for linear systems with weak H-matrices. The class of weak H-matrices with singular comparison matrices is a subclass of general H−matrices [29] and has some theoretical problems. In particular, the convergence problem on AOR iterative methods for this class of matrices is an open problem and is a focus of our further work.
Acknowledgement
This work is supported by the National Natural Science Foundations of China (Nos.11201362, 11601409, 11271297), the Natural Science Foundation of Shaaxi Province of China (No. 2016JM1009) and the Science Foundation of the Education Department of Shaanxi Province of China (No. 14JK1305).
References
[1] Berman A., Plemmons R.J.: Nonnegative Matrices in the Mathematical Sciences. Academic, New York, 1979.10.1016/B978-0-12-092250-5.50009-6Suche in Google Scholar
[2] Demmel J.W.: Applied Numerical Linear Algebra. SIAM Press, 1997.10.1137/1.9781611971446Suche in Google Scholar
[3] Golub G.H., Van Loan C.F.: Matrix Computations, third ed. Johns Hopkins University Press, Baltimore, 1996.Suche in Google Scholar
[4] Saad Y.: Iterative methods for sparse linear systmes. PWS publishing Company, Boston, 1996.Suche in Google Scholar
[5] Varga R.S.: Matrix Iterative Analysis, Second ed. Springer-Verlag, Berlin, Heidelberg, 2000.10.1007/978-3-642-05156-2Suche in Google Scholar
[6] Bru R., Corral C., Gimenez I. and Mas J.: Classes of general H-matrices. Linear Algebra Appl., 429(2008), 2358-2366.10.1016/j.laa.2007.10.030Suche in Google Scholar
[7] Bru R., Corral C., Gimenez I. and Mas J.: Schur coplement of general H –matrices. Numer. Linear Algebra Appl., 16(2009), 935-974.10.1002/nla.668Suche in Google Scholar
[8] Bru R., Gimenez I. and Hadjidimos A.: Is A ∈ ℂn,n a general H –matrices. Linear Algebra Appl., 436(2012), 364-380.10.1016/j.laa.2011.03.009Suche in Google Scholar
[9] Cveković L.J., Herceg D.: Convergence theory for AOR method. Journal of Computational Mathematics, 8(1990), 128-134.Suche in Google Scholar
[10] Darvishi M.T., Hessari P.: On convergence of the generalized AOR method for linear systems with diagonally dominant coef?cient matrices. Applied Mathematics and Computation, 176(2006), 128-133.10.1016/j.amc.2005.09.051Suche in Google Scholar
[11] Evans D.J., Martins M.M.: On the convergence of the extrapolated AOR method. Internat. J. Computer Math, 43(1992), 161-171.10.1080/00207169208804083Suche in Google Scholar
[12] Gao Z.X., Huang T.Z.: Convergence of AOR method. Applied Mathematics and Computation, 176(2006), 134-140.10.1016/j.amc.2005.09.020Suche in Google Scholar
[13] Hadjidimos A.: Accelerated overrelaxation method. Mathematics of Computation. 32(1978), 149-157.10.1090/S0025-5718-1978-0483340-6Suche in Google Scholar
[14] James K.R., Riha W.: Convergence Criteria for Successive Overrelaxation. SIAM Journal on Numerical Analysis. 12(1975), 137-143.10.1137/0712013Suche in Google Scholar
[15] James K.R.: Convergence of Matrix Iterations Subject to Diagonal Dominance. SIAM Journal on Numerical Analysis. 10(1973), 478-484.10.1137/0710042Suche in Google Scholar
[16] Li W.: On nekrasov matrices. Linear Algebra Appl., 281(1998), 87-96.10.1016/S0024-3795(98)10031-9Suche in Google Scholar
[17] Martins M.M.: On an Accelerated Overrelaxation Iterative Method for Linear Systems With Strictly Diagonally Dominant Matrix. Mathematics of Computation, 35(1980), 1269-1273.10.1090/S0025-5718-1980-0583503-4Suche in Google Scholar
[18] Ortega J.M., Plemmons R.J.: Extension of the Ostrowski-Reich theorem for SOR iterations. Linear Algebra Appl., 28(1979), 177-191.10.1016/0024-3795(79)90131-9Suche in Google Scholar
[19] Plemmons R.J.: M –matrix characterization I: Nonsingular M –matrix. Linear Algebra Appl., 18(1977), 175-188.10.1016/0024-3795(77)90073-8Suche in Google Scholar
[20] Song Y.Z.: On the convergence of the MAOR method, Journal of Computational and Applied Mathematics, 79(1997), 299-317.10.1016/S0377-0427(97)00008-3Suche in Google Scholar
[21] Song Y.Z.: On the convergence of the generalized AOR method. Linear Algebra and its Applications, 256(1997), 199-218.10.1016/S0024-3795(96)00028-6Suche in Google Scholar
[22] Tian G.X., Huang T.Z., Cui S.Y.: Convergence of generalized AOR iterative method for linear systems with strictly diagonally dominant matrices. Journal of Computational and Applied Mathematics, 213(2008), 240-247.10.1016/j.cam.2007.01.016Suche in Google Scholar
[23] Varga R.S.: On recurring theorems on diagonal dominance. Linear Algebra Appl., 13(1976), 1-9.10.1016/0024-3795(76)90037-9Suche in Google Scholar
[24] Wang X.M.: Convergence for the MSOR iterative method applied to H-matrices. Applied Numerical Mathematics, 21(1996), 469-479.10.1016/S0168-9274(96)00016-5Suche in Google Scholar
[25] Wang X.M.: Convergence theory for the general GAOR type iterative method and the MSOR iterative method applied to H-matrices. Linear Algebra and its Applications, 250(1997), 1-19.10.1016/0024-3795(95)00391-6Suche in Google Scholar
[26] Xiang S.H., Zhang S.L.: A convergence analysis of block accelerated over-relaxation iterative methods for weak block H-matrices to partition ?, Linear Algebra and its Applications. 418(2006), 20-32.10.1016/j.laa.2006.01.013Suche in Google Scholar
[27] Young D.M.: Iterative solution of large linear systmes. Academic Press, New York, 1971.Suche in Google Scholar
[28] Zhang C.Y., Xu F.M., Xu Z.B., Li J.C.: General H-matrices and their Schur complements. Frontiers of Mathematics in China, 9(2014), 1141-1168.10.1007/s11464-014-0395-1Suche in Google Scholar
[29] Zhang C.Y., Ye D., Zhong C.L., Luo S.H.: Convergence on Gauss-Seidel iterative methods for linear systems with general H-matrices. Electronic Journal of Linear Algebra, 30(2015), 843-870.10.13001/1081-3810.1972Suche in Google Scholar
[30] Zhang C.Y. and Li Y.T.: Diagonal Dominant Matrices and the Determing of H matrices and M matrices, Guangxi Sciences, 12(2005), 1161-164.Suche in Google Scholar
[31] Zhang C.Y., Xu C.X., Li Y.T.: The Eigenvalue Distribution on Schur Complements of H matrices, Linear Algebra Appl., 422(2007), 250-264.10.1016/j.laa.2006.09.022Suche in Google Scholar
[32] Zhang C.Y., Luo S.H., Xu C.X., Jiang H.Y.: Schur complements of generally diagonally dominant matrices and criterion for irreducibility of matrices. Electronic Journal of Linear Algebra, 18(2009), 69-87.10.13001/1081-3810.1295Suche in Google Scholar
[33] Frankel S.P.: Convergence rates of iterative treatments of partial differential equations. Math. Tables Aids Comput., 4(1950), 65-75.10.2307/2002770Suche in Google Scholar
[34] Young D.M.: Iterative methods for solving partial differential equations of elliptic type. Doctoral Thesis, Harvard University, Cambridge, MA, 1950.Suche in Google Scholar
[35] Kahan W.: Gauss-Seidel methods of solving large systems of linear equations. Doctoral Thesis, University of Toronto, Toronto, Canada, 1958.Suche in Google Scholar
[36] Young D.M.: Iterative methods for solving partial differential equations of elliptic type. Trans. Amer. Math. Soc. 76(1954) 92-111.10.1090/S0002-9947-1954-0059635-7Suche in Google Scholar
[37] Neumaier A. and Varga R.S.: Exact convergence and divergence domains for the symmetric successive overrelaxation iterative (SSOR) method applied to H -matrices. Linear Algebra Appl., 58(1984), 261-272.10.1016/0024-3795(84)90216-7Suche in Google Scholar
[38] Meurant G.: Computer Solution of Large Linear Systems. Studies in Mathematics and its Applications, Vol. 28, North-Holland Publishing Co., Amsterdam, 1999.Suche in Google Scholar
© 2016 Zhang et al., published by De Gruyter Open
This work is licensed under the Creative Commons Attribution-NonCommercial-NoDerivatives 3.0 License.
Artikel in diesem Heft
- Regular Article
-
A metric graph satisfying
- Regular Article
- On the Riemann-Hilbert problem in multiply connected domains
- Regular Article
- Hamilton cycles in almost distance-hereditary graphs
- Regular Article
- Locally adequate semigroup algebras
- Regular Article
- Parabolic oblique derivative problem with discontinuous coefficients in generalized weighted Morrey spaces
- Corrigendum
- Corrigendum to: parabolic oblique derivative problem with discontinuous coefficients in generalized weighted Morrey spaces
- Regular Article
- Some new bounds of the minimum eigenvalue for the Hadamard product of an M-matrix and an inverse M-matrix
- Regular Article
- Integral inequalities involving generalized Erdélyi-Kober fractional integral operators
- Regular Article
- Results on the deficiencies of some differential-difference polynomials of meromorphic functions
- Regular Article
- General numerical radius inequalities for matrices of operators
- Regular Article
- The best uniform quadratic approximation of circular arcs with high accuracy
- Regular Article
- Multiple gcd-closed sets and determinants of matrices associated with arithmetic functions
- Regular Article
- A note on the rate of convergence for Chebyshev-Lobatto and Radau systems
- Regular Article
- On the weakly(α, ψ, ξ)-contractive condition for multi-valued operators in metric spaces and related fixed point results
- Regular Article
- Existence of a common solution for a system of nonlinear integral equations via fixed point methods in b-metric spaces
- Regular Article
- Bounds for the Z-eigenpair of general nonnegative tensors
- Regular Article
- Subsymmetry and asymmetry models for multiway square contingency tables with ordered categories
- Regular Article
- End-regular and End-orthodox generalized lexicographic products of bipartite graphs
- Regular Article
- Refinement of the Jensen integral inequality
- Regular Article
- New iterative codes for 𝓗-tensors and an application
- Regular Article
- A result for O2-convergence to be topological in posets
- Regular Article
- A fixed point approach to the Mittag-Leffler-Hyers-Ulam stability of a fractional integral equation
- Regular Article
- Uncertainty orders on the sublinear expectation space
- Regular Article
- Generalized derivations of Lie triple systems
- Regular Article
- The BV solution of the parabolic equation with degeneracy on the boundary
- Regular Article
- Malliavin method for optimal investment in financial markets with memory
- Regular Article
- Parabolic sublinear operators with rough kernel generated by parabolic calderön-zygmund operators and parabolic local campanato space estimates for their commutators on the parabolic generalized local morrey spaces
- Regular Article
- On annihilators in BL-algebras
- Regular Article
- On derivations of quantales
- Regular Article
-
On the closed subfields of
- Regular Article
- A class of tridiagonal operators associated to some subshifts
- Regular Article
- Some notes to existence and stability of the positive periodic solutions for a delayed nonlinear differential equations
- Regular Article
- Weighted fractional differential equations with infinite delay in Banach spaces
- Regular Article
- Laplace-Stieltjes transform of the system mean lifetime via geometric process model
- Regular Article
- Various limit theorems for ratios from the uniform distribution
- Regular Article
- On α-almost Artinian modules
- Regular Article
- Limit theorems for the weights and the degrees in anN-interactions random graph model
- Regular Article
- An analysis on the stability of a state dependent delay differential equation
- Regular Article
- The hybrid mean value of Dedekind sums and two-term exponential sums
- Regular Article
- New modification of Maheshwari’s method with optimal eighth order convergence for solving nonlinear equations
- Regular Article
- On the concept of general solution for impulsive differential equations of fractional-order q ∈ (2,3)
- Regular Article
- A Riesz representation theory for completely regular Hausdorff spaces and its applications
- Regular Article
- Oscillation of impulsive conformable fractional differential equations
- Regular Article
- Dynamics of doubly stochastic quadratic operators on a finite-dimensional simplex
- Regular Article
- Homoclinic solutions of 2nth-order difference equations containing both advance and retardation
- Regular Article
- When do L-fuzzy ideals of a ring generate a distributive lattice?
- Regular Article
- Fully degenerate poly-Bernoulli numbers and polynomials
- Commentary
- Commentary to: Generalized derivations of Lie triple systems
- Regular Article
- Simple sufficient conditions for starlikeness and convexity for meromorphic functions
- Regular Article
- Global stability analysis and control of leptospirosis
- Regular Article
- Random attractors for stochastic two-compartment Gray-Scott equations with a multiplicative noise
- Regular Article
- The fuzzy metric space based on fuzzy measure
- Regular Article
- A classification of low dimensional multiplicative Hom-Lie superalgebras
- Regular Article
- Structures of W(2.2) Lie conformal algebra
- Regular Article
- On the number of spanning trees, the Laplacian eigenvalues, and the Laplacian Estrada index of subdivided-line graphs
- Regular Article
- Parabolic Marcinkiewicz integrals on product spaces and extrapolation
- Regular Article
- Prime, weakly prime and almost prime elements in multiplication lattice modules
- Regular Article
- Pochhammer symbol with negative indices. A new rule for the method of brackets
- Regular Article
- Outcome space range reduction method for global optimization of sum of affine ratios problem
- Regular Article
- Factorization theorems for strong maps between matroids of arbitrary cardinality
- Regular Article
- A convergence analysis of SOR iterative methods for linear systems with weak H-matrices
- Regular Article
- Existence theory for sequential fractional differential equations with anti-periodic type boundary conditions
- Regular Article
- Some congruences for 3-component multipartitions
- Regular Article
- Bound for the largest singular value of nonnegative rectangular tensors
- Regular Article
- Convolutions of harmonic right half-plane mappings
- Regular Article
- On homological classification of pomonoids by GP-po-flatness of S-posets
- Regular Article
- On CSQ-normal subgroups of finite groups
- Regular Article
- The homogeneous balance of undetermined coefficients method and its application
- Regular Article
- On the saturated numerical semigroups
- Regular Article
- The Bruhat rank of a binary symmetric staircase pattern
- Regular Article
- Fixed point theorems for cyclic contractive mappings via altering distance functions in metric-like spaces
- Regular Article
- Singularities of lightcone pedals of spacelike curves in Lorentz-Minkowski 3-space
- Regular Article
- An S-type upper bound for the largest singular value of nonnegative rectangular tensors
- Regular Article
- Fuzzy ideals of ordered semigroups with fuzzy orderings
- Regular Article
- On meromorphic functions for sharing two sets and three sets in m-punctured complex plane
- Regular Article
- An incremental approach to obtaining attribute reduction for dynamic decision systems
- Regular Article
- Very true operators on MTL-algebras
- Regular Article
- Value distribution of meromorphic solutions of homogeneous and non-homogeneous complex linear differential-difference equations
- Regular Article
- A class of 3-dimensional almost Kenmotsu manifolds with harmonic curvature tensors
- Regular Article
- Robust dynamic output feedback fault-tolerant control for Takagi-Sugeno fuzzy systems with interval time-varying delay via improved delay partitioning approach
- Regular Article
- New bounds for the minimum eigenvalue of M-matrices
- Regular Article
- Semi-quotient mappings and spaces
- Regular Article
- Fractional multilinear integrals with rough kernels on generalized weighted Morrey spaces
- Regular Article
- A family of singular functions and its relation to harmonic fractal analysis and fuzzy logic
- Regular Article
- Solution to Fredholm integral inclusions via (F, δb)-contractions
- Regular Article
- An Ulam stability result on quasi-b-metric-like spaces
- Regular Article
- On the arrowhead-Fibonacci numbers
- Regular Article
- Rough semigroups and rough fuzzy semigroups based on fuzzy ideals
- Regular Article
- The general solution of impulsive systems with Riemann-Liouville fractional derivatives
- Regular Article
- A remark on local fractional calculus and ordinary derivatives
- Regular Article
- Elastic Sturmian spirals in the Lorentz-Minkowski plane
- Topical Issue: Metaheuristics: Methods and Applications
- Bias-variance decomposition in Genetic Programming
- Topical Issue: Metaheuristics: Methods and Applications
- A novel generalized oppositional biogeography-based optimization algorithm: application to peak to average power ratio reduction in OFDM systems
- Special Issue on Recent Developments in Differential Equations
- Modeling of vibration for functionally graded beams
- Special Issue on Recent Developments in Differential Equations
- Decomposition of a second-order linear time-varying differential system as the series connection of two first order commutative pairs
- Special Issue on Recent Developments in Differential Equations
- Differential equations associated with generalized Bell polynomials and their zeros
- Special Issue on Recent Developments in Differential Equations
- Differential equations for p, q-Touchard polynomials
- Special Issue on Recent Developments in Differential Equations
- A new approach to nonlinear singular integral operators depending on three parameters
- Special Issue on Recent Developments in Differential Equations
- Performance and stochastic stability of the adaptive fading extended Kalman filter with the matrix forgetting factor
- Special Issue on Recent Developments in Differential Equations
- On new characterization of inextensible flows of space-like curves in de Sitter space
- Special Issue on Recent Developments in Differential Equations
- Convergence theorems for a family of multivalued nonexpansive mappings in hyperbolic spaces
- Special Issue on Recent Developments in Differential Equations
- Fractional virus epidemic model on financial networks
- Special Issue on Recent Developments in Differential Equations
- Reductions and conservation laws for BBM and modified BBM equations
- Special Issue on Recent Developments in Differential Equations
- Extinction of a two species non-autonomous competitive system with Beddington-DeAngelis functional response and the effect of toxic substances
Artikel in diesem Heft
- Regular Article
-
A metric graph satisfying
- Regular Article
- On the Riemann-Hilbert problem in multiply connected domains
- Regular Article
- Hamilton cycles in almost distance-hereditary graphs
- Regular Article
- Locally adequate semigroup algebras
- Regular Article
- Parabolic oblique derivative problem with discontinuous coefficients in generalized weighted Morrey spaces
- Corrigendum
- Corrigendum to: parabolic oblique derivative problem with discontinuous coefficients in generalized weighted Morrey spaces
- Regular Article
- Some new bounds of the minimum eigenvalue for the Hadamard product of an M-matrix and an inverse M-matrix
- Regular Article
- Integral inequalities involving generalized Erdélyi-Kober fractional integral operators
- Regular Article
- Results on the deficiencies of some differential-difference polynomials of meromorphic functions
- Regular Article
- General numerical radius inequalities for matrices of operators
- Regular Article
- The best uniform quadratic approximation of circular arcs with high accuracy
- Regular Article
- Multiple gcd-closed sets and determinants of matrices associated with arithmetic functions
- Regular Article
- A note on the rate of convergence for Chebyshev-Lobatto and Radau systems
- Regular Article
- On the weakly(α, ψ, ξ)-contractive condition for multi-valued operators in metric spaces and related fixed point results
- Regular Article
- Existence of a common solution for a system of nonlinear integral equations via fixed point methods in b-metric spaces
- Regular Article
- Bounds for the Z-eigenpair of general nonnegative tensors
- Regular Article
- Subsymmetry and asymmetry models for multiway square contingency tables with ordered categories
- Regular Article
- End-regular and End-orthodox generalized lexicographic products of bipartite graphs
- Regular Article
- Refinement of the Jensen integral inequality
- Regular Article
- New iterative codes for 𝓗-tensors and an application
- Regular Article
- A result for O2-convergence to be topological in posets
- Regular Article
- A fixed point approach to the Mittag-Leffler-Hyers-Ulam stability of a fractional integral equation
- Regular Article
- Uncertainty orders on the sublinear expectation space
- Regular Article
- Generalized derivations of Lie triple systems
- Regular Article
- The BV solution of the parabolic equation with degeneracy on the boundary
- Regular Article
- Malliavin method for optimal investment in financial markets with memory
- Regular Article
- Parabolic sublinear operators with rough kernel generated by parabolic calderön-zygmund operators and parabolic local campanato space estimates for their commutators on the parabolic generalized local morrey spaces
- Regular Article
- On annihilators in BL-algebras
- Regular Article
- On derivations of quantales
- Regular Article
-
On the closed subfields of
- Regular Article
- A class of tridiagonal operators associated to some subshifts
- Regular Article
- Some notes to existence and stability of the positive periodic solutions for a delayed nonlinear differential equations
- Regular Article
- Weighted fractional differential equations with infinite delay in Banach spaces
- Regular Article
- Laplace-Stieltjes transform of the system mean lifetime via geometric process model
- Regular Article
- Various limit theorems for ratios from the uniform distribution
- Regular Article
- On α-almost Artinian modules
- Regular Article
- Limit theorems for the weights and the degrees in anN-interactions random graph model
- Regular Article
- An analysis on the stability of a state dependent delay differential equation
- Regular Article
- The hybrid mean value of Dedekind sums and two-term exponential sums
- Regular Article
- New modification of Maheshwari’s method with optimal eighth order convergence for solving nonlinear equations
- Regular Article
- On the concept of general solution for impulsive differential equations of fractional-order q ∈ (2,3)
- Regular Article
- A Riesz representation theory for completely regular Hausdorff spaces and its applications
- Regular Article
- Oscillation of impulsive conformable fractional differential equations
- Regular Article
- Dynamics of doubly stochastic quadratic operators on a finite-dimensional simplex
- Regular Article
- Homoclinic solutions of 2nth-order difference equations containing both advance and retardation
- Regular Article
- When do L-fuzzy ideals of a ring generate a distributive lattice?
- Regular Article
- Fully degenerate poly-Bernoulli numbers and polynomials
- Commentary
- Commentary to: Generalized derivations of Lie triple systems
- Regular Article
- Simple sufficient conditions for starlikeness and convexity for meromorphic functions
- Regular Article
- Global stability analysis and control of leptospirosis
- Regular Article
- Random attractors for stochastic two-compartment Gray-Scott equations with a multiplicative noise
- Regular Article
- The fuzzy metric space based on fuzzy measure
- Regular Article
- A classification of low dimensional multiplicative Hom-Lie superalgebras
- Regular Article
- Structures of W(2.2) Lie conformal algebra
- Regular Article
- On the number of spanning trees, the Laplacian eigenvalues, and the Laplacian Estrada index of subdivided-line graphs
- Regular Article
- Parabolic Marcinkiewicz integrals on product spaces and extrapolation
- Regular Article
- Prime, weakly prime and almost prime elements in multiplication lattice modules
- Regular Article
- Pochhammer symbol with negative indices. A new rule for the method of brackets
- Regular Article
- Outcome space range reduction method for global optimization of sum of affine ratios problem
- Regular Article
- Factorization theorems for strong maps between matroids of arbitrary cardinality
- Regular Article
- A convergence analysis of SOR iterative methods for linear systems with weak H-matrices
- Regular Article
- Existence theory for sequential fractional differential equations with anti-periodic type boundary conditions
- Regular Article
- Some congruences for 3-component multipartitions
- Regular Article
- Bound for the largest singular value of nonnegative rectangular tensors
- Regular Article
- Convolutions of harmonic right half-plane mappings
- Regular Article
- On homological classification of pomonoids by GP-po-flatness of S-posets
- Regular Article
- On CSQ-normal subgroups of finite groups
- Regular Article
- The homogeneous balance of undetermined coefficients method and its application
- Regular Article
- On the saturated numerical semigroups
- Regular Article
- The Bruhat rank of a binary symmetric staircase pattern
- Regular Article
- Fixed point theorems for cyclic contractive mappings via altering distance functions in metric-like spaces
- Regular Article
- Singularities of lightcone pedals of spacelike curves in Lorentz-Minkowski 3-space
- Regular Article
- An S-type upper bound for the largest singular value of nonnegative rectangular tensors
- Regular Article
- Fuzzy ideals of ordered semigroups with fuzzy orderings
- Regular Article
- On meromorphic functions for sharing two sets and three sets in m-punctured complex plane
- Regular Article
- An incremental approach to obtaining attribute reduction for dynamic decision systems
- Regular Article
- Very true operators on MTL-algebras
- Regular Article
- Value distribution of meromorphic solutions of homogeneous and non-homogeneous complex linear differential-difference equations
- Regular Article
- A class of 3-dimensional almost Kenmotsu manifolds with harmonic curvature tensors
- Regular Article
- Robust dynamic output feedback fault-tolerant control for Takagi-Sugeno fuzzy systems with interval time-varying delay via improved delay partitioning approach
- Regular Article
- New bounds for the minimum eigenvalue of M-matrices
- Regular Article
- Semi-quotient mappings and spaces
- Regular Article
- Fractional multilinear integrals with rough kernels on generalized weighted Morrey spaces
- Regular Article
- A family of singular functions and its relation to harmonic fractal analysis and fuzzy logic
- Regular Article
- Solution to Fredholm integral inclusions via (F, δb)-contractions
- Regular Article
- An Ulam stability result on quasi-b-metric-like spaces
- Regular Article
- On the arrowhead-Fibonacci numbers
- Regular Article
- Rough semigroups and rough fuzzy semigroups based on fuzzy ideals
- Regular Article
- The general solution of impulsive systems with Riemann-Liouville fractional derivatives
- Regular Article
- A remark on local fractional calculus and ordinary derivatives
- Regular Article
- Elastic Sturmian spirals in the Lorentz-Minkowski plane
- Topical Issue: Metaheuristics: Methods and Applications
- Bias-variance decomposition in Genetic Programming
- Topical Issue: Metaheuristics: Methods and Applications
- A novel generalized oppositional biogeography-based optimization algorithm: application to peak to average power ratio reduction in OFDM systems
- Special Issue on Recent Developments in Differential Equations
- Modeling of vibration for functionally graded beams
- Special Issue on Recent Developments in Differential Equations
- Decomposition of a second-order linear time-varying differential system as the series connection of two first order commutative pairs
- Special Issue on Recent Developments in Differential Equations
- Differential equations associated with generalized Bell polynomials and their zeros
- Special Issue on Recent Developments in Differential Equations
- Differential equations for p, q-Touchard polynomials
- Special Issue on Recent Developments in Differential Equations
- A new approach to nonlinear singular integral operators depending on three parameters
- Special Issue on Recent Developments in Differential Equations
- Performance and stochastic stability of the adaptive fading extended Kalman filter with the matrix forgetting factor
- Special Issue on Recent Developments in Differential Equations
- On new characterization of inextensible flows of space-like curves in de Sitter space
- Special Issue on Recent Developments in Differential Equations
- Convergence theorems for a family of multivalued nonexpansive mappings in hyperbolic spaces
- Special Issue on Recent Developments in Differential Equations
- Fractional virus epidemic model on financial networks
- Special Issue on Recent Developments in Differential Equations
- Reductions and conservation laws for BBM and modified BBM equations
- Special Issue on Recent Developments in Differential Equations
- Extinction of a two species non-autonomous competitive system with Beddington-DeAngelis functional response and the effect of toxic substances