The best uniform quadratic approximation of circular arcs with high accuracy

Abstract
In this article, the issue of the best uniform approximation of circular arcs with parametrically defined polynomial curves is considered. The best uniform approximation of degree 2 to a circular arc is given in explicit form. The approximation is constructed so that the error function is the Chebyshev polynomial of degree 4; the error function equioscillates five times; the approximation order is four. For θ = π/4 arcs (quarter of a circle), the uniform error is 5.5 × 10−3. The numerical examples demonstrate the efficiency and simplicity of the approximation method as well as satisfy the properties of the best uniform approximation and yield the highest possible accuracy.
1 Introduction
Bézier curves and surfaces are the most widely used mathematical modelling tools in CAD/CAM systems, see [1–3]. One of the main concerns in representing Bézier curves is to keep the degree as low as possible. This simplifies the evaluation, manipulation and determination of a small number of Bézier points. These and other factors encourage us to consider approximating circular arcs using quadratic Bézier curves. Besides many other applications, quadratic Bézier curves are commonly used in encoding and rendering of type fonts and HTML techniques by many companies. Circular arcs are commonly used in the fields of Computer Aided Geometric Design CAGD, Computer Graphics, and many other applications. Since circular arcs are represented by rational Bézier curves and cannot be represented by polynomial curves in explicit form, circular arc representations using polynomial Bézier curves have been developed by many researchers, see for example [4–14].
In this paper, a novel approach to represent a circular arc using quadratic Bézier curves with high accuracy is proposed. The method leads to the solution that minimizes a variation of the Euclidean error.
We want to represent the longest arc of the circle, i.e. the angle θ as large as possible. At the same time, the resulting Bézier curve has to satisfy the Chebyshev error. It is known that the angle θ can not be greater than
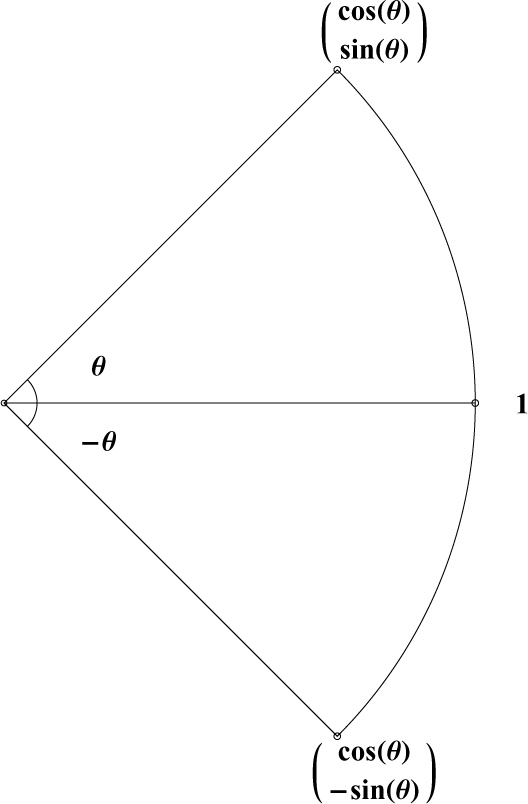
A circular arc (quarter,
It is not possible to exactly represent a circle with a polynomial curve. While a circle can be represented exactly using rational Bézier curves, a polynomial approximation is preferred in many applications. The ability to represent a primitive circle is a must, especially in computer graphics and data and image processing. Thus, there is a demand to find a parametrically defined polynomial curve p : t ↦(x(t), y(t)), 0 ≤ t ≤ 1, where x(t), y(t) are polynomials of degree n. The degree of p has to be as small as possible, and p has to approximate c within tolerable error. Having the degree n low makes the software very fast, convenient, obviates complications of high degree, and reduces the cost. In this paper, degree 2 curves are considered, and it is shown that it works well and produces results that are as good as the results of higher degrees. This makes the method competitive. Namely, quadratic Bézier curves are constructed to represent circular arcs with the best quadratic uniform approximation and the highest accuracy.
A possible function to measure the error between p and c is the Euclidean error function:
The square root complicates the analysis. Thus to avoid radicals, we find the square of the p components of the circular arc. So, E(t), is replaced by the following error function
Note that both e(t), and E(t), attain their roots and extrema at the same parameters. In this paper, we are interested in finding the quadratic best uniform approximation that has the highest order of approximation and the minimum error. This research is motivated by the conjecture in [11] which states that it is possible to approximate a curve by a polynomial of degree n with order 2n, rather than the classical order n + 1. In quadratic case, the associated error function has to equioscillate five times. Consequently, the approximation problem can be formulated as follows.
The approximation problem in this paper is to find p : t ↦ x(t), y(t)), 0 ≤ t ≤ 1, where x(t), y(t), are polynomials of degree 2, that approximates c by satisfying the following three conditions:
p minimizes maxt∈[0;1] |e(t)|,
p approximates c with order four,
e(t), equioscillates five times over [0, 1].
The solution to this problem is shown in Section 3 to be as follows:
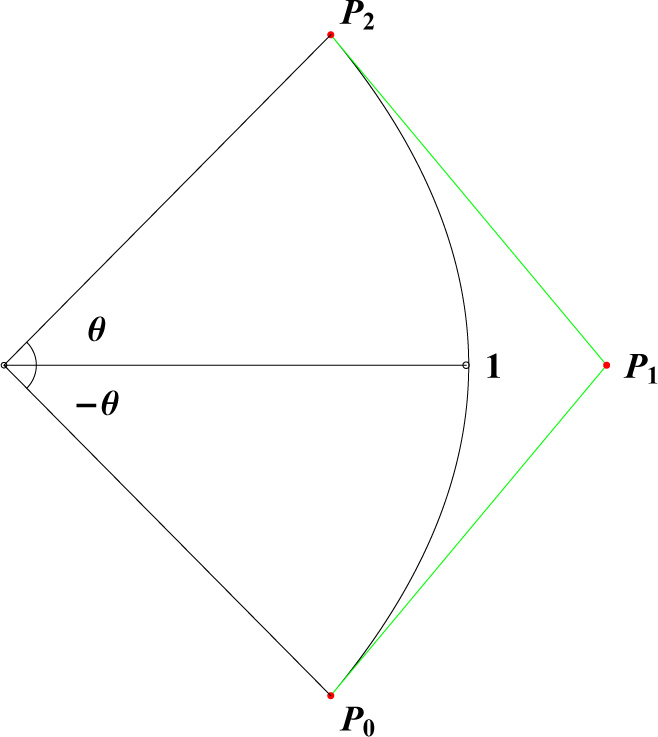
It represents the largest circular arc that can satisfy the Chebyshev error. This solution covers almost half of the circle and is presented in Fig. 3; the corresponding error is shown in Fig. 4.
The circular arc and the quadratic approximating Bézier curve
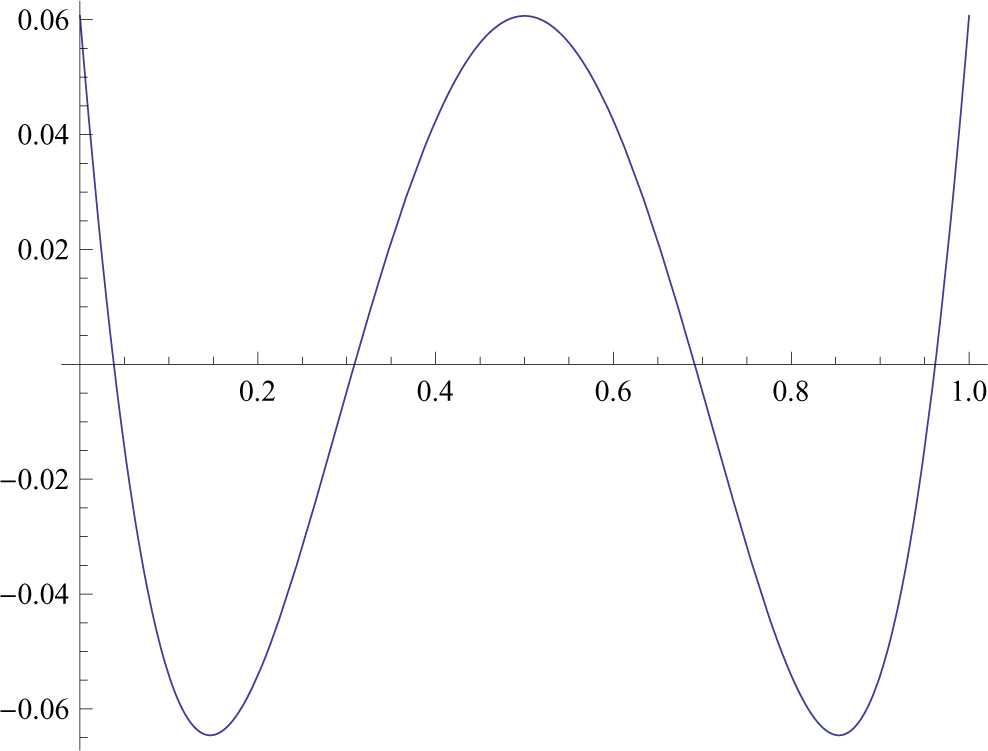
Euclidean error of the quadratic approximating Bézier curve
This paper is organized as follows. Section 1 introduces some preliminaries and defines the Bézier points for the best solution (the Bézier curve). The main result is given in Theorem 3.1 in Section 3. In Section 4, the properties of the best solution are presented. Section 5 states all other possible solutions. Section 6 presents comparisons between the quarter of the circle using this method and other existing methods. Conclusions and suggested open problems are given in Section 7.
2 Preliminaries
Throughout this paper, we use the notations x(t), y(t), and
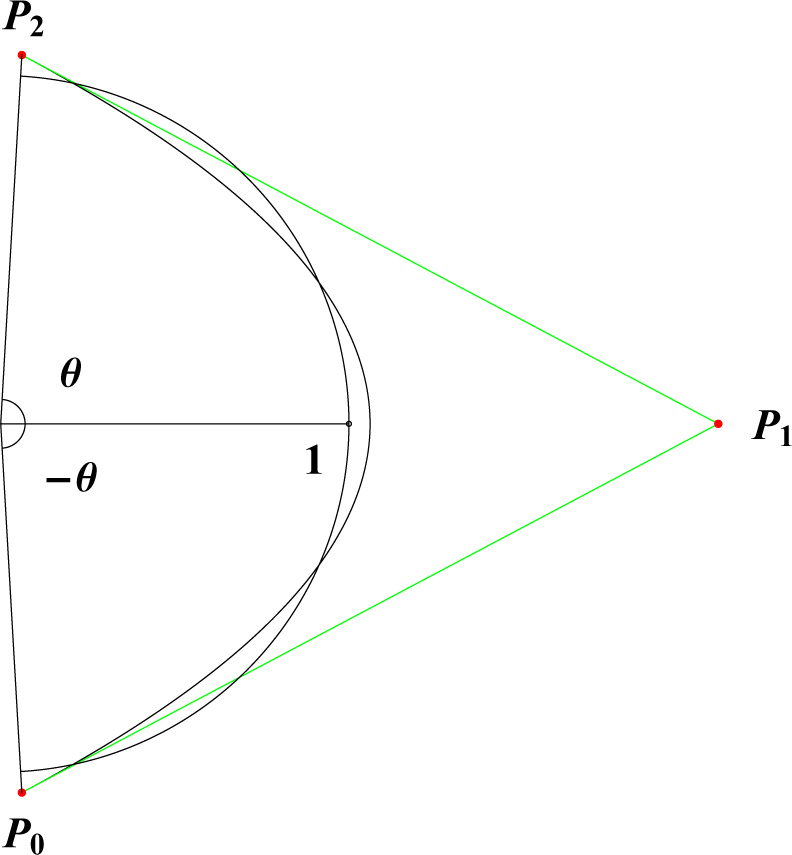
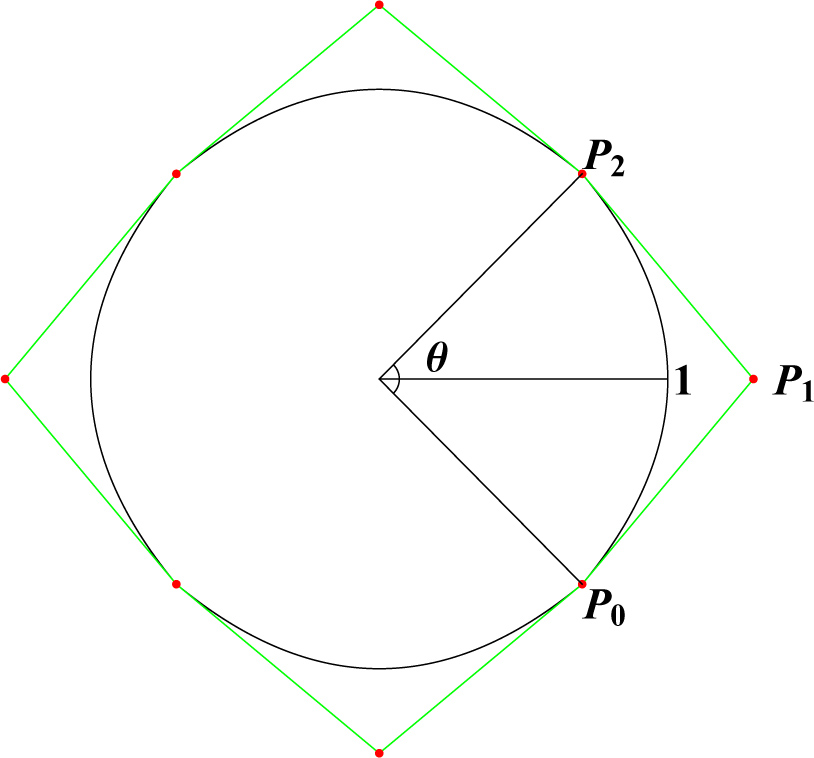
In this paper, the curve p(t), is given in Bézier form, see Fig. 2. The Bézier curve p(t), of degree 2 is given by
where p0, p1, p2 are the Bézier points, and
To represent a whole circle, the circular arc between the points (cos(θ), −sin(θ)), and (cos(θ), sin(θ)), is approximated in the first step, see Fig. 1. Thereafter, the rest of the circle is represented by rotation of this segment.
Since it is intended to represent the whole circle with piecewise polynomial curve with minimum error, it is not important where the errors occur, at the end points or elsewhere; it is important to keep this error as small as possible than where the error occurs. Other methods may require continuity conditions, see [15, 16].
To represent a circular arc, the Bézier points are chosen to explore symmetry properties of the circle. So, let p0 = (α0 cos(θ) −β0 sin(θ)), then by the symmetry of the circular arc the point p2 should have the form p2 = (α0 cos(θ) β0 sin(θ)). Also, because of the symmetry, p1 must be on the positive x-axis and thus p1 = (γ, 0). By making the substitution α = α0 cos(θ), β = β0 sinθ, then the proper choice for the Bézier points should be
Possible Bézier points of circular arc
To have the Bézier curve p in the first and fourth quadrants as the circular arc c, the following conditions should be satisfied
Thus, the Bézier polynomial curve p(t), is given by
There are three parameters α, β, γ that will be used to have the polynomial curve p comply with the conditions of the approximation problem; this is done in the following section.
3. The best quadratic uniform approximation
The values of α, β, γ that minimize the uniform error and satisfy the conditions of the approximation problem are given in the following theorem.
The Bézier curve in (6) with the Bézier points in (4) , where
Substituting the components of p(t) into equation (2) for the error function e(t) gives
The last equality for e(t) is a polynomial of degree 4. To satisfy the approximation conditions, the values of α, β, γ have to be chosen so that the error function e(t) coincides with the monic Chebyshev polynomial of degree 4, see [17]. Substituting the values of α = α*, β = β*, γ = γ* from (7) and simplifying gives
Making the substitution
The last polynomial is the monic quartic Chebyshev polynomial T̃4(u), u ∈ [−1, 1], which is the unique polynomial of degree 4 that minimizes |e(u)| over [−1, 1] and equioscillates five times between
Thus
Substituting the bounds of e(t) gives
This proves Theorem 3.1.
Conditions (2) and (3) given in Theorem 3.1 are the consequences of the fact that the conditions were imposed on the error function to make it coincide with the monic quartic Chebyshev polynomial. In particular, condition (2) assures the improvement of the order of approximation over the standard order (from 3 to 4). The function of condition (3) is to assure that the approximation is the best uniform approximation which is clear from Fig. 4.
Fig. 3 shows the circular arc and the approximating Bézier curve, and Fig. 4 shows the corresponding error. One would not expect a quadratic Bézier curve to approximate almost half a circle more precisely than this.
The Bézier curve in Theorem 3.1 corresponds to the angle θ = 86.5°. In this case, the Bézier curve is the longest circular arc that can satisfy the Chebyshev error. It is almost half of the circle.
The Bézier curve with α = α*, β = β*, γ = γ*represents the circular arc in the first and fourth quadrants generated counter clockwise, see Fig. 3.
For programming purposes, the parameters α, β, γ, are given in terms of each other, for example if α is given as a constant, then the other parameters are given in terms of α as follows:
(10)x(t) does not approximate cos(t), neither does y(t) approximate sin(t). Consequently, (x(t) cos(t))2 + (y(t) −sin(t))2does not tell anything. The only guarantee is that (x(t), y(t)), t ∈ [0, 1] approximates the circular arc between (cos(θ), −sinθ)) and (cos(θ), sin(θ)) for θ = 86.5°.
In the following section, the properties of the approximating quadratic Bézier curve are given.
4. Properties of approximating quadratic Bézier curve
In addition to the properties mentioned in the remarks after Theorem 3.1, some other properties are given in this section. The first is about the roots of the error functions e(t) and E(t) that are given in the following proposition.
The roots of the error functions e(t) and E(t) are:
Because of symmetry, we have t1 + t4 = 1, t2 + t3 = 1.
Substituting ti in e(t) gives e(ti) = 0, i = 1, 2, 3, 4. Since e(t) is a polynomial of degree 4 and thus has 4 roots, these are all the roots. The error function E(t) has the same roots of e(t) because E(t) = 0 if and only if
The quadratic Bézier curve in Theorem 3.1 and the circular arc intersect at the points p(t1), p(t2), p(t3), and p(t4).
In the following proposition, the extreme values of the error functions are given.
The extreme values of e(t) and E(t) occur at
Because of symmetry, we have
Moreover, the values of the error functions E(t) and e(t) at t̃i are given by
Thus
Differentiating e(t) gives a polynomial of degree 3. Substituting t̃1, t̃2, t̃3 gives e′(t̃i) = 0, i = 1, 2, 3. Since e′(t) is of degree three, these are all interior critical points. Checking at the end points adds t̃0 = 1, t̃4 = 0 to the critical points. Since
To get the solution in Theorem 3.1, some conditions were imposed on α, β, γ in (5). However, if the conditions on α, β, γ are removed, there will be other possible solutions. In the following section, all the possible (real) quadratic Bézier curves are listed.
5 All quadratic Bézier curves
If the conditions imposed on 𝛼, 𝛽, 𝛾 in (5) are removed, then the other solutions are given in the following theorem.
Removing the conditions on 𝛼 𝛽 𝛾 in (5), then the approximation problem has eight solutions; four of these solutions are complex and the other four are real. The real solutions are sign multiple of the solution in Theorem 3.1 and are summarized in the following table:
All real solutions to the approximation problem
| Solution | Sign α | Sign γ | Sign β | curve in quadrants | generated |
|---|---|---|---|---|---|
| 1st | + | + | + | 1st and 4th | counter clockwise |
| 2nd | + | + | - | 1st and 4th | clockwise |
| 3rd | - | - | + | 2nd and 3rd | counter clockwise |
| 4th | - | - | - | 2nd and 3rd | clockwise |
The case of the first solution has been proved in Theorem 3.1. For each of the other three solutions, the same steps in Theorem 3.1 are carried out for the error function to get the monic Chebyshev polynomial of degree 4 that satisfies the conditions of the approximation problem. □
Table 1 lists all the (real) possible solutions to the approximation problem; fortunately, four out of the eight solutions are real, make sense, satisfy the three approximation conditions, and are related in being reflections to each other around the x- or y-axis. The second solution coincides with the first solution, but generated clockwise. The third and fourth solutions are reflections of the first solution around the y-axis, generated counter clockwise and clockwise, respectively.
Sign of α is the same as the sign of γ. If sign of 𝛽 is positive then the curve is generated counter clockwise and if it is negative then the curve is generated clockwise. If sign of α is positive then the curve lies in the first and fourth quadrants, and if it is negative then the curve lies in the second and third quadrants.
The roots of the error functions e(t) and E(t) for all of the solutions in Table 1 are the same as in Proposition 4.1.
The extreme values of e(t) and E(t) for all of the solutions in Table 1 occur at the same parameters that are given in Proposition 4.2.
The third and the fourth solutions are reflections of the first and second solutions around the y-axis, respectively.
The first solution is chosen because it is generated in the same direction as the circle is generated.
As a consequence of Theorems 3.1 and 5.1, we have the following proposition regarding the error at any t ϵ [0, 1].
For every t ϵ [0, 1], the errors of approximating the circular arc using the Bézier curves in Theorems 3.1 and 5.1 are given by:
In the following section, examples and comparisons are given.
6 Examples and comparisons
Theorem 3.1 gives the best uniform approximation for
The figure of the full circle using four Bézier curves
We compare our method in this paper with the other existing methods. All of the following methods are based on cubic Bézier curve representation of quarter of circle, except the work of Mørken [10].
In [4], a cubic parametric curve is represented; the end points and a point in the middle of the circular arc are interpolated; the error is 2.7 × 10–4 for a quarter of circle. A quarter of a circle is approximated by a cubic curve in [5] using the values and tangents at the end points with error 4.2 × 10–4. A general cubic scheme of order six is presented in [6] using values of positions, tangents, and curvatures at the endpoints. For a quarter of a circle, they got an error of 1.4 × 10–3. A cubic approximation for the circle of order six with error for a quarter of 1.4 × 10M–4 is given in [7]. In [9], different types of cubic approximations of circular arcs of order six are considered; best error of a quarter is 2 × 10–4. In [12], the conjecture of high order approximation is illustrated; representation of a circular arc is given as an example with error about 2 × 10–3 for a circle quarter, see also [11, 13]. Quadratic splines are used in [8] to represent conic sections with high order. Quadratic methods are given in [10] to represent circular arcs with best error of 1 × 10–2.
The scheme in this paper represents a circular arc in an easy way while satisfying the approximation conditions of the best uniform approximation. The resulting error between the circle and the quadratic Bézier curve is 5.5×10–3. This example shows that the quadratic Bézier representation of circular arc competes with the other existing cubic Bézier representations of circular arcs. It has additional advantage that it is represented using three Bézier points making it affordable in all applications.
Fig. 5 and Fig. 6 illustrate the facts that were proved in the theorems and propositions. In particular, the approximating Bézier curves satisfy conditions of the approximating problem: p minimizes the uniform error maxt∈[0,1]|E(t)| and approximates c with order four, and the error function E(t) equioscillates five times over the interval [0, 1].
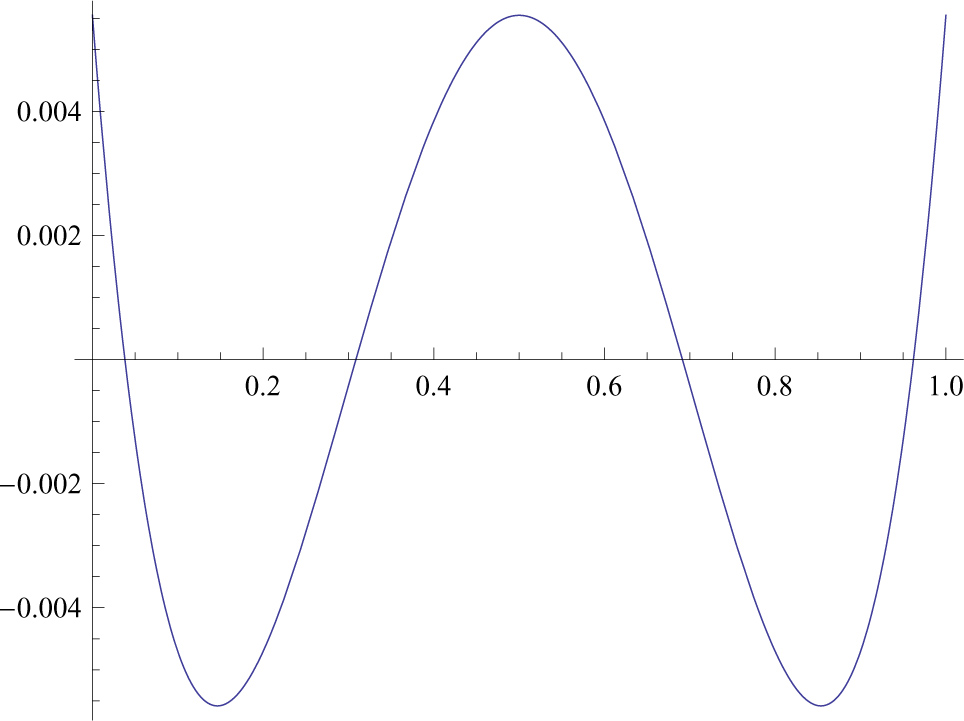
The error of one out of four quarters of the full circle
7 Conclusions
It is a challenging issue and is still an open problem to find the best quadratic uniform approximation of a function with the following properties: the error function equioscillates four times, the approximation order is three, and the curve and the approximation intersect three times.
Despite these challenges, we are able to find in this article the best quadratic uniform approximation of circular arcs with parametrically defined polynomial curve in explicit form. Fortunately, we did get better results than expected: the error function equioscillates five times (rather than four times); the approximation order is four (rather than three); the curve and the approximation intersect four times (rather than three times). Numerical examples are given in section 6 demonstrated the efficiency and simplicity of the approximation method.
Representing circular arcs using quadratic Bézier curves is needed in many applications. It is interesting to further investigate the following related issues:
Study quadratic approximation with G1–continuity using equioscillating error functions and constrained Chebyshev polynomials.
Find a way to write the Bézier points in terms of the angle θ. It would be very important to have the best approximation available for any θ perhaps by employing a semi-numerical method.
Apply these results in this paper to perform degree reduction of Bézier curves to get the best approximation with the minimum uniform error.
Moreover, it will also be interesting to approximate other kinds of curves using best uniform quadratic approximation that has order four, and the error function equioscillates five times. Even though it is a tough subject to find the best quadratic uniform approximation of a function with error that equioscillates four times, has approximation order three, and the function and the approximation intersect three times.
Acknowledgement
The author owes thanks to the reviewers for helpful and invaluable comments and suggestions for improving an earlier version of this paper.
References
[1] G. Farin, Curves and Surfaces for Computer Aided Geometric Design, Academic Press, Boston (1988).10.1016/B978-0-12-460515-2.50020-2Search in Google Scholar
[2] J. Hoschek and D. Lasser, Fundamentals of Computer Aided Geometric Design, A K Peters, Wellesley (1993).Search in Google Scholar
[3] H. Prautzsch, W. Boehm, M. Paluszny, Bézier and B-Spline Techniques, Springer (2002).10.1007/978-3-662-04919-8Search in Google Scholar
[4] P. Bézier, The mathematical basis of the UNISURF CAD system, Butterworth-Heinemann Newton, MA, USA, ISBN 0-408-22175-5, (1986).Search in Google Scholar
[5] J. Blinn, How many ways can you draw a circle?, Computer Graphics and Applications, IEEE 7(8) (1987), 39-44.10.1109/MCG.1987.276918Search in Google Scholar
[6] C. de Boor, K. Höllig and M. Sabin, High accuracy geometric Hermite interpolation, Comput. Aided Geom. Design 4 (1988), 269-278.10.1016/0167-8396(87)90002-1Search in Google Scholar
[7] T. Dokken, M. Dæhlen, T. Lyche and K. Mørken, Good approximation of circles by curvature-continuous Bézier curves, Comput. Aided Geom. Design 7 (1990), 33-41.10.1016/0167-8396(90)90019-NSearch in Google Scholar
[8] M. Floater, High order approximation of conic sections by quadratic splines, Comput. Aided Geom. Design 12 (1995), 617-637.10.1016/0167-8396(94)00037-SSearch in Google Scholar
[9] M. Goldapp, Approximation of circular arcs by cubic polynomials, Comput. Aided Geom. Design 8 (1991), 227-238.10.1016/0167-8396(91)90007-XSearch in Google Scholar
[10] K. Mørken, Best approximation of circle segments by quadratic Bézier curves, in Curves and Surfaces, P. L. Laurent, A. Le Méhaute, and L. Schumacker (eds.), Academic Press (1991), 331-336.10.1016/B978-0-12-438660-0.50052-2Search in Google Scholar
[11] A. Rababah, Taylor theorem for planar curves, Proc. Amer. Math. Soc. 119(3), (1993), 803-810.10.1090/S0002-9939-1993-1151815-2Search in Google Scholar
[12] A. Rababah, High order approximation method for curves, Comput. Aided Geom. Design 12 (1995), 89-102.10.1016/0167-8396(94)00004-CSearch in Google Scholar
[13] A. Rababah, High accuracy Hermite approximation for space curves in <d, Journal of Mathematical Analysis and Applications 325(2), (2007), 920-931.10.1016/j.jmaa.2006.02.054Search in Google Scholar
[14] A. Rababah, The best uniform cubic and quartic approximation of circular arcs with high accuracy, preprint.Search in Google Scholar
[15] A. Rababah and S. Mann, Iterative process for G2-multi degree reduction of Bézier curves, Applied Mathematics and Computation 217(20), (2011), 8126-8133.10.1016/j.amc.2011.03.016Search in Google Scholar
[16] A. Rababah and S. Mann, Linear methods for G1, G2, and G3-multi-degree reduction of Bézier curves, Computer-Aided Design 45(2), (2013), 405-414.10.1016/j.cad.2012.10.023Search in Google Scholar
[17] J. Rice, The approximation of functions, Vol. 1: linear theory, Addison-Wesley, 1964.Search in Google Scholar
© 2016 Rababah, published by De Gruyter Open.
This work is licensed under the Creative Commons Attribution-NonCommercial-NoDerivatives 3.0 License.
Articles in the same Issue
- Regular Article
-
A metric graph satisfying
- Regular Article
- On the Riemann-Hilbert problem in multiply connected domains
- Regular Article
- Hamilton cycles in almost distance-hereditary graphs
- Regular Article
- Locally adequate semigroup algebras
- Regular Article
- Parabolic oblique derivative problem with discontinuous coefficients in generalized weighted Morrey spaces
- Corrigendum
- Corrigendum to: parabolic oblique derivative problem with discontinuous coefficients in generalized weighted Morrey spaces
- Regular Article
- Some new bounds of the minimum eigenvalue for the Hadamard product of an M-matrix and an inverse M-matrix
- Regular Article
- Integral inequalities involving generalized Erdélyi-Kober fractional integral operators
- Regular Article
- Results on the deficiencies of some differential-difference polynomials of meromorphic functions
- Regular Article
- General numerical radius inequalities for matrices of operators
- Regular Article
- The best uniform quadratic approximation of circular arcs with high accuracy
- Regular Article
- Multiple gcd-closed sets and determinants of matrices associated with arithmetic functions
- Regular Article
- A note on the rate of convergence for Chebyshev-Lobatto and Radau systems
- Regular Article
- On the weakly(α, ψ, ξ)-contractive condition for multi-valued operators in metric spaces and related fixed point results
- Regular Article
- Existence of a common solution for a system of nonlinear integral equations via fixed point methods in b-metric spaces
- Regular Article
- Bounds for the Z-eigenpair of general nonnegative tensors
- Regular Article
- Subsymmetry and asymmetry models for multiway square contingency tables with ordered categories
- Regular Article
- End-regular and End-orthodox generalized lexicographic products of bipartite graphs
- Regular Article
- Refinement of the Jensen integral inequality
- Regular Article
- New iterative codes for 𝓗-tensors and an application
- Regular Article
- A result for O2-convergence to be topological in posets
- Regular Article
- A fixed point approach to the Mittag-Leffler-Hyers-Ulam stability of a fractional integral equation
- Regular Article
- Uncertainty orders on the sublinear expectation space
- Regular Article
- Generalized derivations of Lie triple systems
- Regular Article
- The BV solution of the parabolic equation with degeneracy on the boundary
- Regular Article
- Malliavin method for optimal investment in financial markets with memory
- Regular Article
- Parabolic sublinear operators with rough kernel generated by parabolic calderön-zygmund operators and parabolic local campanato space estimates for their commutators on the parabolic generalized local morrey spaces
- Regular Article
- On annihilators in BL-algebras
- Regular Article
- On derivations of quantales
- Regular Article
-
On the closed subfields of
- Regular Article
- A class of tridiagonal operators associated to some subshifts
- Regular Article
- Some notes to existence and stability of the positive periodic solutions for a delayed nonlinear differential equations
- Regular Article
- Weighted fractional differential equations with infinite delay in Banach spaces
- Regular Article
- Laplace-Stieltjes transform of the system mean lifetime via geometric process model
- Regular Article
- Various limit theorems for ratios from the uniform distribution
- Regular Article
- On α-almost Artinian modules
- Regular Article
- Limit theorems for the weights and the degrees in anN-interactions random graph model
- Regular Article
- An analysis on the stability of a state dependent delay differential equation
- Regular Article
- The hybrid mean value of Dedekind sums and two-term exponential sums
- Regular Article
- New modification of Maheshwari’s method with optimal eighth order convergence for solving nonlinear equations
- Regular Article
- On the concept of general solution for impulsive differential equations of fractional-order q ∈ (2,3)
- Regular Article
- A Riesz representation theory for completely regular Hausdorff spaces and its applications
- Regular Article
- Oscillation of impulsive conformable fractional differential equations
- Regular Article
- Dynamics of doubly stochastic quadratic operators on a finite-dimensional simplex
- Regular Article
- Homoclinic solutions of 2nth-order difference equations containing both advance and retardation
- Regular Article
- When do L-fuzzy ideals of a ring generate a distributive lattice?
- Regular Article
- Fully degenerate poly-Bernoulli numbers and polynomials
- Commentary
- Commentary to: Generalized derivations of Lie triple systems
- Regular Article
- Simple sufficient conditions for starlikeness and convexity for meromorphic functions
- Regular Article
- Global stability analysis and control of leptospirosis
- Regular Article
- Random attractors for stochastic two-compartment Gray-Scott equations with a multiplicative noise
- Regular Article
- The fuzzy metric space based on fuzzy measure
- Regular Article
- A classification of low dimensional multiplicative Hom-Lie superalgebras
- Regular Article
- Structures of W(2.2) Lie conformal algebra
- Regular Article
- On the number of spanning trees, the Laplacian eigenvalues, and the Laplacian Estrada index of subdivided-line graphs
- Regular Article
- Parabolic Marcinkiewicz integrals on product spaces and extrapolation
- Regular Article
- Prime, weakly prime and almost prime elements in multiplication lattice modules
- Regular Article
- Pochhammer symbol with negative indices. A new rule for the method of brackets
- Regular Article
- Outcome space range reduction method for global optimization of sum of affine ratios problem
- Regular Article
- Factorization theorems for strong maps between matroids of arbitrary cardinality
- Regular Article
- A convergence analysis of SOR iterative methods for linear systems with weak H-matrices
- Regular Article
- Existence theory for sequential fractional differential equations with anti-periodic type boundary conditions
- Regular Article
- Some congruences for 3-component multipartitions
- Regular Article
- Bound for the largest singular value of nonnegative rectangular tensors
- Regular Article
- Convolutions of harmonic right half-plane mappings
- Regular Article
- On homological classification of pomonoids by GP-po-flatness of S-posets
- Regular Article
- On CSQ-normal subgroups of finite groups
- Regular Article
- The homogeneous balance of undetermined coefficients method and its application
- Regular Article
- On the saturated numerical semigroups
- Regular Article
- The Bruhat rank of a binary symmetric staircase pattern
- Regular Article
- Fixed point theorems for cyclic contractive mappings via altering distance functions in metric-like spaces
- Regular Article
- Singularities of lightcone pedals of spacelike curves in Lorentz-Minkowski 3-space
- Regular Article
- An S-type upper bound for the largest singular value of nonnegative rectangular tensors
- Regular Article
- Fuzzy ideals of ordered semigroups with fuzzy orderings
- Regular Article
- On meromorphic functions for sharing two sets and three sets in m-punctured complex plane
- Regular Article
- An incremental approach to obtaining attribute reduction for dynamic decision systems
- Regular Article
- Very true operators on MTL-algebras
- Regular Article
- Value distribution of meromorphic solutions of homogeneous and non-homogeneous complex linear differential-difference equations
- Regular Article
- A class of 3-dimensional almost Kenmotsu manifolds with harmonic curvature tensors
- Regular Article
- Robust dynamic output feedback fault-tolerant control for Takagi-Sugeno fuzzy systems with interval time-varying delay via improved delay partitioning approach
- Regular Article
- New bounds for the minimum eigenvalue of M-matrices
- Regular Article
- Semi-quotient mappings and spaces
- Regular Article
- Fractional multilinear integrals with rough kernels on generalized weighted Morrey spaces
- Regular Article
- A family of singular functions and its relation to harmonic fractal analysis and fuzzy logic
- Regular Article
- Solution to Fredholm integral inclusions via (F, δb)-contractions
- Regular Article
- An Ulam stability result on quasi-b-metric-like spaces
- Regular Article
- On the arrowhead-Fibonacci numbers
- Regular Article
- Rough semigroups and rough fuzzy semigroups based on fuzzy ideals
- Regular Article
- The general solution of impulsive systems with Riemann-Liouville fractional derivatives
- Regular Article
- A remark on local fractional calculus and ordinary derivatives
- Regular Article
- Elastic Sturmian spirals in the Lorentz-Minkowski plane
- Topical Issue: Metaheuristics: Methods and Applications
- Bias-variance decomposition in Genetic Programming
- Topical Issue: Metaheuristics: Methods and Applications
- A novel generalized oppositional biogeography-based optimization algorithm: application to peak to average power ratio reduction in OFDM systems
- Special Issue on Recent Developments in Differential Equations
- Modeling of vibration for functionally graded beams
- Special Issue on Recent Developments in Differential Equations
- Decomposition of a second-order linear time-varying differential system as the series connection of two first order commutative pairs
- Special Issue on Recent Developments in Differential Equations
- Differential equations associated with generalized Bell polynomials and their zeros
- Special Issue on Recent Developments in Differential Equations
- Differential equations for p, q-Touchard polynomials
- Special Issue on Recent Developments in Differential Equations
- A new approach to nonlinear singular integral operators depending on three parameters
- Special Issue on Recent Developments in Differential Equations
- Performance and stochastic stability of the adaptive fading extended Kalman filter with the matrix forgetting factor
- Special Issue on Recent Developments in Differential Equations
- On new characterization of inextensible flows of space-like curves in de Sitter space
- Special Issue on Recent Developments in Differential Equations
- Convergence theorems for a family of multivalued nonexpansive mappings in hyperbolic spaces
- Special Issue on Recent Developments in Differential Equations
- Fractional virus epidemic model on financial networks
- Special Issue on Recent Developments in Differential Equations
- Reductions and conservation laws for BBM and modified BBM equations
- Special Issue on Recent Developments in Differential Equations
- Extinction of a two species non-autonomous competitive system with Beddington-DeAngelis functional response and the effect of toxic substances
Articles in the same Issue
- Regular Article
-
A metric graph satisfying
- Regular Article
- On the Riemann-Hilbert problem in multiply connected domains
- Regular Article
- Hamilton cycles in almost distance-hereditary graphs
- Regular Article
- Locally adequate semigroup algebras
- Regular Article
- Parabolic oblique derivative problem with discontinuous coefficients in generalized weighted Morrey spaces
- Corrigendum
- Corrigendum to: parabolic oblique derivative problem with discontinuous coefficients in generalized weighted Morrey spaces
- Regular Article
- Some new bounds of the minimum eigenvalue for the Hadamard product of an M-matrix and an inverse M-matrix
- Regular Article
- Integral inequalities involving generalized Erdélyi-Kober fractional integral operators
- Regular Article
- Results on the deficiencies of some differential-difference polynomials of meromorphic functions
- Regular Article
- General numerical radius inequalities for matrices of operators
- Regular Article
- The best uniform quadratic approximation of circular arcs with high accuracy
- Regular Article
- Multiple gcd-closed sets and determinants of matrices associated with arithmetic functions
- Regular Article
- A note on the rate of convergence for Chebyshev-Lobatto and Radau systems
- Regular Article
- On the weakly(α, ψ, ξ)-contractive condition for multi-valued operators in metric spaces and related fixed point results
- Regular Article
- Existence of a common solution for a system of nonlinear integral equations via fixed point methods in b-metric spaces
- Regular Article
- Bounds for the Z-eigenpair of general nonnegative tensors
- Regular Article
- Subsymmetry and asymmetry models for multiway square contingency tables with ordered categories
- Regular Article
- End-regular and End-orthodox generalized lexicographic products of bipartite graphs
- Regular Article
- Refinement of the Jensen integral inequality
- Regular Article
- New iterative codes for 𝓗-tensors and an application
- Regular Article
- A result for O2-convergence to be topological in posets
- Regular Article
- A fixed point approach to the Mittag-Leffler-Hyers-Ulam stability of a fractional integral equation
- Regular Article
- Uncertainty orders on the sublinear expectation space
- Regular Article
- Generalized derivations of Lie triple systems
- Regular Article
- The BV solution of the parabolic equation with degeneracy on the boundary
- Regular Article
- Malliavin method for optimal investment in financial markets with memory
- Regular Article
- Parabolic sublinear operators with rough kernel generated by parabolic calderön-zygmund operators and parabolic local campanato space estimates for their commutators on the parabolic generalized local morrey spaces
- Regular Article
- On annihilators in BL-algebras
- Regular Article
- On derivations of quantales
- Regular Article
-
On the closed subfields of
- Regular Article
- A class of tridiagonal operators associated to some subshifts
- Regular Article
- Some notes to existence and stability of the positive periodic solutions for a delayed nonlinear differential equations
- Regular Article
- Weighted fractional differential equations with infinite delay in Banach spaces
- Regular Article
- Laplace-Stieltjes transform of the system mean lifetime via geometric process model
- Regular Article
- Various limit theorems for ratios from the uniform distribution
- Regular Article
- On α-almost Artinian modules
- Regular Article
- Limit theorems for the weights and the degrees in anN-interactions random graph model
- Regular Article
- An analysis on the stability of a state dependent delay differential equation
- Regular Article
- The hybrid mean value of Dedekind sums and two-term exponential sums
- Regular Article
- New modification of Maheshwari’s method with optimal eighth order convergence for solving nonlinear equations
- Regular Article
- On the concept of general solution for impulsive differential equations of fractional-order q ∈ (2,3)
- Regular Article
- A Riesz representation theory for completely regular Hausdorff spaces and its applications
- Regular Article
- Oscillation of impulsive conformable fractional differential equations
- Regular Article
- Dynamics of doubly stochastic quadratic operators on a finite-dimensional simplex
- Regular Article
- Homoclinic solutions of 2nth-order difference equations containing both advance and retardation
- Regular Article
- When do L-fuzzy ideals of a ring generate a distributive lattice?
- Regular Article
- Fully degenerate poly-Bernoulli numbers and polynomials
- Commentary
- Commentary to: Generalized derivations of Lie triple systems
- Regular Article
- Simple sufficient conditions for starlikeness and convexity for meromorphic functions
- Regular Article
- Global stability analysis and control of leptospirosis
- Regular Article
- Random attractors for stochastic two-compartment Gray-Scott equations with a multiplicative noise
- Regular Article
- The fuzzy metric space based on fuzzy measure
- Regular Article
- A classification of low dimensional multiplicative Hom-Lie superalgebras
- Regular Article
- Structures of W(2.2) Lie conformal algebra
- Regular Article
- On the number of spanning trees, the Laplacian eigenvalues, and the Laplacian Estrada index of subdivided-line graphs
- Regular Article
- Parabolic Marcinkiewicz integrals on product spaces and extrapolation
- Regular Article
- Prime, weakly prime and almost prime elements in multiplication lattice modules
- Regular Article
- Pochhammer symbol with negative indices. A new rule for the method of brackets
- Regular Article
- Outcome space range reduction method for global optimization of sum of affine ratios problem
- Regular Article
- Factorization theorems for strong maps between matroids of arbitrary cardinality
- Regular Article
- A convergence analysis of SOR iterative methods for linear systems with weak H-matrices
- Regular Article
- Existence theory for sequential fractional differential equations with anti-periodic type boundary conditions
- Regular Article
- Some congruences for 3-component multipartitions
- Regular Article
- Bound for the largest singular value of nonnegative rectangular tensors
- Regular Article
- Convolutions of harmonic right half-plane mappings
- Regular Article
- On homological classification of pomonoids by GP-po-flatness of S-posets
- Regular Article
- On CSQ-normal subgroups of finite groups
- Regular Article
- The homogeneous balance of undetermined coefficients method and its application
- Regular Article
- On the saturated numerical semigroups
- Regular Article
- The Bruhat rank of a binary symmetric staircase pattern
- Regular Article
- Fixed point theorems for cyclic contractive mappings via altering distance functions in metric-like spaces
- Regular Article
- Singularities of lightcone pedals of spacelike curves in Lorentz-Minkowski 3-space
- Regular Article
- An S-type upper bound for the largest singular value of nonnegative rectangular tensors
- Regular Article
- Fuzzy ideals of ordered semigroups with fuzzy orderings
- Regular Article
- On meromorphic functions for sharing two sets and three sets in m-punctured complex plane
- Regular Article
- An incremental approach to obtaining attribute reduction for dynamic decision systems
- Regular Article
- Very true operators on MTL-algebras
- Regular Article
- Value distribution of meromorphic solutions of homogeneous and non-homogeneous complex linear differential-difference equations
- Regular Article
- A class of 3-dimensional almost Kenmotsu manifolds with harmonic curvature tensors
- Regular Article
- Robust dynamic output feedback fault-tolerant control for Takagi-Sugeno fuzzy systems with interval time-varying delay via improved delay partitioning approach
- Regular Article
- New bounds for the minimum eigenvalue of M-matrices
- Regular Article
- Semi-quotient mappings and spaces
- Regular Article
- Fractional multilinear integrals with rough kernels on generalized weighted Morrey spaces
- Regular Article
- A family of singular functions and its relation to harmonic fractal analysis and fuzzy logic
- Regular Article
- Solution to Fredholm integral inclusions via (F, δb)-contractions
- Regular Article
- An Ulam stability result on quasi-b-metric-like spaces
- Regular Article
- On the arrowhead-Fibonacci numbers
- Regular Article
- Rough semigroups and rough fuzzy semigroups based on fuzzy ideals
- Regular Article
- The general solution of impulsive systems with Riemann-Liouville fractional derivatives
- Regular Article
- A remark on local fractional calculus and ordinary derivatives
- Regular Article
- Elastic Sturmian spirals in the Lorentz-Minkowski plane
- Topical Issue: Metaheuristics: Methods and Applications
- Bias-variance decomposition in Genetic Programming
- Topical Issue: Metaheuristics: Methods and Applications
- A novel generalized oppositional biogeography-based optimization algorithm: application to peak to average power ratio reduction in OFDM systems
- Special Issue on Recent Developments in Differential Equations
- Modeling of vibration for functionally graded beams
- Special Issue on Recent Developments in Differential Equations
- Decomposition of a second-order linear time-varying differential system as the series connection of two first order commutative pairs
- Special Issue on Recent Developments in Differential Equations
- Differential equations associated with generalized Bell polynomials and their zeros
- Special Issue on Recent Developments in Differential Equations
- Differential equations for p, q-Touchard polynomials
- Special Issue on Recent Developments in Differential Equations
- A new approach to nonlinear singular integral operators depending on three parameters
- Special Issue on Recent Developments in Differential Equations
- Performance and stochastic stability of the adaptive fading extended Kalman filter with the matrix forgetting factor
- Special Issue on Recent Developments in Differential Equations
- On new characterization of inextensible flows of space-like curves in de Sitter space
- Special Issue on Recent Developments in Differential Equations
- Convergence theorems for a family of multivalued nonexpansive mappings in hyperbolic spaces
- Special Issue on Recent Developments in Differential Equations
- Fractional virus epidemic model on financial networks
- Special Issue on Recent Developments in Differential Equations
- Reductions and conservation laws for BBM and modified BBM equations
- Special Issue on Recent Developments in Differential Equations
- Extinction of a two species non-autonomous competitive system with Beddington-DeAngelis functional response and the effect of toxic substances