Heterogeneous interventional effects with multiple mediators: Semiparametric and nonparametric approaches
-
Max Rubinstein
 ,
Zach Branson
,
Zach Branson

Abstract
We propose semiparametric and nonparametric methods to estimate conditional interventional indirect effects in the setting of two discrete mediators whose causal ordering is unknown. Average interventional indirect effects have been shown to decompose an average treatment effect into a direct effect and interventional indirect effects that quantify effects of hypothetical interventions on mediator distributions. Yet these effects may be heterogeneous across the covariate distribution. We consider the problem of estimating these effects at particular points. We propose an influence function-based estimator of the projection of the conditional effects onto a working model, and show under some conditions that we can achieve root-n consistent and asymptotically normal estimates. Second, we propose a fully nonparametric approach to estimation and show the conditions where this approach can achieve oracle rates of convergence. Finally, we propose a sensitivity analysis that identifies bounds on both the average and conditional effects in the presence of mediator-outcome confounding. We show that the same methods easily extend to allow estimation of these bounds. We conclude by examining heterogeneous effects with respect to the effect of COVID-19 vaccinations on depression during February 2021.
1 Introduction
A goal of causal mediation analysis is to understand the mechanisms through which interventions work. “Natural effects” most directly pertain to the idea of mechanism [1] and decompose the individual-level treatment effect into pathways that work directly or via changes in mediator values. However, the identifying assumptions required to estimate these effects are unenforceable even in randomized experiments. These effects are also not generally identified in common applied settings that involve multiple mediators unless the mediators are considered jointly. “Interventional effects” were proposed as alternative causal estimands that are identifiable under weaker assumptions and in settings with multiple mediators [2,3]. These effects conceptualize hypothetical interventions on the mediator distributions defined at specific covariate values. Unlike natural effects, these effects are identifiable in a sequentially randomized experiment. While the relationship between interventional effects and mechanisms acting at an individual level is unclear [1], interventional effects have gained popularity in applied research over the past several years.
This popularity is also in part because the same statistical functionals yield alternative causal interpretations that are often of substantive interest. Specifically, under weaker assumptions, these same methods can quantify disparity reductions achieved via interventions on some possibly mediating factor(s). For example, Vansteelandt and Daniel [3] analyze disparities in breast-cancer survival among high and low socioeconomic status (SES) women. They consider a model where SES causes breast-cancer survival via a direct pathway and via cancer screening and treatment choices, so that SES takes the role of an exposure. They estimate that if low SES women had the same (conditional) distribution of cancer screening and treatment choices as high SES women, the observed disparity in breast-cancer survival between high and low SES women would be reduced by half. This effect requires conceiving of an unspecified hypothetical intervention that could shift the covariate-stratrum specific distributions of cancer screening and treatment choices among low SES women to match that of high SES women. However, this intervention does not require conceiving of potential outcomes with respect to SES, or more generally of the types of controversial counterfactual quantities required to conceive of natural effects [3].
To date, the literature on interventional effects has primarily focused on estimating average effects. We instead consider estimating conditional effects across covariates that are possibly continuous. For example, consider the application from [3]. One natural follow-up question might be how these disparity reductions change as a function of a woman’s age. Even if the total disparity in cancer survival were constant across age, it remains possible that age moderates the interventional effects and therefore also the proportion of the disparity that would be eliminated via such an intervention. These questions pertain to conditional interventional indirect effects (CIIEs). To our knowledge, proposed strategies to estimate the CIIE have been limited to parametric methods [3,4], and the validity of the inferences are tied to assumptions that the models are correctly specified.
Our first contribution is to propose methods that allow for flexible nonparametric and machine learning methods for estimation. Specifically, we consider the setting of a binary intervention and two discrete-valued mediators whose causal ordering is unknown. We propose two estimation procedures: first, a semiparametric projection-based approach; second, a fully nonparametric approach. Both procedures are conceptually simple, and involve a regression of an estimate of the uncentered influence function for the average effect onto the covariates. However, the semiparametric approach targets a projection of the CIIE onto a parametric model rather than the CIIE itself. Projection-based estimators have frequently been proposed in the context of different causal estimands [5–7]. Our proposal extends this idea to this setting, and we show that under some conditions, root-n consistent and asymptotically normal estimates of the projection parameter are possible. The second proposal considers a fully nonparametric estimation procedure (a “DR-Learner”) that targets the CIIE directly, extending results from ref. [8]. While directly targeting the CIIE instead of its projection may seem preferable, we cannot in general obtain root-n consistent estimates. Even so, we show that we can obtain oracle rates of convergence in some settings. Both the projection estimator and the DR-Learner substantially weaken the modeling assumptions used to date in the literature on estimating the CIIE. Moreover, these methods allow the use of flexible nonparametric and machine-learning methods for estimation while still obtaining relatively fast rates of convergence.
Our methods, like most, require several identifying assumptions, including that the mediator-outcome relationship is unconfounded. A natural question is whether our estimators are sensitive to violations of this assumption. We therefore derive bounds on the CIIE while relaxing this assumption and show that we can use both the projection-based approach and the DR-Learner to estimate these quantities. These methods naturally extend to allow for estimating bounds on the average effects, and we show that root-n consistent and asymptotically normal estimates of these bounds are possible under some conditions. Existing approaches frequently focus on the natural rather than interventional effects and are often tied to strong parametric modeling assumptions [9–11]. Moreover, sensitivity analyses for conditional estimands is less seldom discussed (though see ref. [12]).
Finally, we demonstrate these methods using an application previously considered in ref. [13]. This study sought to quantify the extent to which COVID-19 vaccines reduced self-reported depression via changes in social isolation versus worries about health among the COVID-19 Trends and Impact Survey (CTIS) respondents in February 2021. The authors only examined effect heterogeneity across discrete subgroups; moreover, they did not conduct a sensitivity analysis with respect to the interventional effect estimates. We revisit this analysis and model how the vote share for Joe Biden in the 2020 US presidential election in each respondent’s county of residence moderated the interventional effects. We then demonstrate our sensitivity analysis for the average and the CIIEs.
This article proceeds as follows. In Section 2, we review interventional effects, the required identifying assumptions, and efficient estimation. In Section 3, we introduce the CIIE and propose the projection-based estimator and the DR-Learner. We establish conditions required for asymptotic normality and root-n consistency of the projection estimator and for obtaining oracle rates of convergence for the DR-Learner. Section 4 contains a simulation study demonstrating that these theoretic properties hold in practice. Section 5 proposes our sensitivity analysis, Section 6 contains our application, and Section 7 contains a discussion of these results.
2 Review
We define the average interventional effects, the causal assumptions required to tie the causal targets to observed data, and efficient estimation of the observed data functionals. We largely summarize material covered in refs [3,14] and refer to those articles for more details. We begin by outlining the setup and notation that we will use throughout.
2.1 Setup and notation
Assume that we observe

Assumed data generating process.
While this figure helps to motivate the problem, we will primarily rely on potential outcomes notation to define our assumptions. Specifically, we use
We also define the following functions of the data. Let
These quantities are defined with respect to marginalizing the outcome regression over
We also denote sample averages using
2.2 Interventional effects
We can decompose the average effect
The interventional direct effect
2.3 Identification
The estimands defined earlier require knowledge about the potential outcomes under each treatment and mediator value for each subject. However, for any individual, we do not observe all of these quantities. We therefore make the following identifying assumptions to connect these causal quantities to the observed data distribution. First, we assume consistency, where for
Assumption 1
(Consistency)
Consistency precludes the potential outcomes for any individual from depending on another individual’s treatment or mediator assignment. We next assume sequential ignorability:
Assumption 2
(Sequential ignorability)
Sequential ignorability consists of three assumptions: equations (5) and (6), or Y–A and M–A ignorability, state that
Assumption 3
(Positivity)
Equation (8) implies that the propensity scores are bounded away from zero and one and the joint mediator probabilities are bounded away from zero with probability one.[1] Under these assumptions, we can write
The functional in (9) reflects other interesting causal parameters under weaker assumptions. For example, consider the case where (7) holds but (5) and (6) do not. This situation is frequently relevant in cases where we are using interventional indirect effects to understand disparities and
This estimand tells us about how much an intervention on the distribution of
2.4 Estimation
Regardless of the targeted causal quantity, (9) reflects a statistical parameter that is a fixed function of the observed data and we require methods to estimate this quantity. One natural idea would be to estimate each function in (9) separately, plug them into that same expression, and take the empirical average. If we were to use correctly specified parametric models to estimate the nuisance functions, the resulting estimate would be consistent for
For example, ref. [14] previously showed that
and where
By using
This estimator involves estimating
The estimates
Condition (1) can be enforced in the estimation procedure. Condition (2) requires that the mean-squared error of the estimated influence-function converges in probability to zero at any rate. This would require, for example, that the propensity scores and their estimates be bounded away from zero and one, the joint mediator probabilities
Influence function-based estimators can therefore attain
3 Conditional effects
In contrast to the average effects
Under Assumptions (1)–(3), these parameters are identified in the observed data as follows:
A natural question is how well we can estimate these effects. Noting that
we can think of an “oracle” influence function-based estimator as providing a benchmark for comparison for any other CIIE estimate:
Just as the “oracle” estimate of
At a high level, both ideas we propose – the projection-estimator and the DR-Learner – substitute the estimated influence function
3.1 Projection estimator
We first consider the case where the second-stage regression estimate
Importantly, we need not assume
To estimate this projection, we assume standard regularity conditions and differentiate equation (17) with respect to
As with the average effects, our estimation approach is again based on the influence curve of
Proposition 1
Under a nonparametric model, the uncentered efficient influence curve for the moment condition
This then suggests the estimator
Theorem 1 shows the conditions required to obtain root-n consistent and asymptotically normal parameter estimates.
Theorem 1
Consider the moment condition
The function class
The map
where
Suppose further that
This also implies that for any fixed value of
Remark 1
The expression
Theorem 1 illustrates that if we can estimate the components of
3.2 DR-Learner
In some applications, we may not be satisfied with a projection and may instead wish to directly estimate
Algorithm 1
Let
Step 1: Nuisance training. Construct estimates of
Step 2: Pseudo-outcome regression. Construct the pseudo-outcomes
(23)Step 3: Cross-fitting (optional). Repeat Steps 1 and 2, swapping the roles of
Remark 2
In practice, when implementing either the DR-Learner or the projection estimator, one may wish to use sample-split estimates of
Proposition 1 from [8] establishes general conditions where the error of a pseudo-outcome regression of
Corollary 1
Define
Let
We provide an expression for
and
Therefore, the DR-Learner is oracle efficient if
Remark 3
As with the second-order expression in Theorem 1, the expression for
One interesting implication of Corollary 1 is that the rate of convergence is a function of the cardinality of the joint mediator values
Assumption 4
The smoothed product of errors between mediator probabilities and/or the outcome model are of the same order for any values of (
and
Assumption 4 would be reasonable if we do not believe the functional form of the mediator probabilities or outcome models varies in underlying complexity across different values of the mediators.
We next consider the form of the second-stage regression
where
Corollary 2 applies this result to Corollary 1.
Corollary 2
Assume the conditions of Corollary
1
and that
where j indexes all of the error products in (25). Therefore,
By Proposition 2 of [8], we then obtain that
To make Corollary 2 concrete, consider the case, where
4 Simulations
We verify that the expected performance of these estimation strategies corresponds with the theory outlined above using a simulation study. First, we outline the data-generating process; second, we demonstrate the performance of our proposed approaches on samples of size
4.1 Setup
To illustrate our proposed approach, we conduct a simulation study with a one-dimensional covariate

Simulation: selected nuisance functions. Nuisance function specifications for simulation study.

Estimands. Total effects, indirect effects, and proportion mediated as a function of
Figure 3 also illustrates the implied curves of
4.2 Estimation: SuperLearner
We evaluate the performance of each estimator across 1,000 simulations on test samples of size 1000. To estimate the nuisance parameters we use SuperLearner, using both the “SL.glm” and “SL.ranger” libraries.[6] These model our nuisance functions as a weighted combination of predictions from logistic regression and random forests models. After estimating the nuisance parameters using samples of size 1,000, we use a separate test sample to estimate the DR-Learner and projection estimators. We then predict the points at
While we expect both estimates to be consistent, the mean square error at each point should differ by constants: this is due to differing inverse weights in the expression for
Table 1 considers the projection estimates and displays the bias, RMSE, and confidence interval coverage associated with our proposed approach (“Efficient”) and with a plugin approach that regresses plugin estimates of
Projection estimators: simulation performance,
| Point | Strategy | Projection | Truth | Bias | Std | RMSE | Coverage |
|---|---|---|---|---|---|---|---|
| 0 | Plugin | Linear | 0.07 | 0.00 | 0.03 | 0.03 | 3.10 |
| 2 | Plugin | Linear | 0.11 |
|
0.02 | 0.04 | 1.00 |
| 0 | Plugin | Quadratic | 0.07 |
|
0.03 | 0.03 | 3.10 |
| 2 | Plugin | Quadratic | 0.11 |
|
0.02 | 0.05 | 0.80 |
| 0 | Efficient | Linear | 0.07 | 0.00 | 0.06 | 0.06 | 95.50 |
| 2 | Efficient | Linear | 0.11 |
|
0.08 | 0.08 | 93.80 |
| 0 | Efficient | Quadratic | 0.07 | 0.00 | 0.06 | 0.06 | 95.10 |
| 2 | Efficient | Quadratic | 0.11 | 0.00 | 0.10 | 0.10 | 93.50 |
Table 2 displays analogous results when using the DR-Learner to target the true CIIE rather than its projection.[7] We use smoothing splines with the default tuning parameters for the second-stage regression,[8] and use the variance estimates from the smoothing matrix and assume that the distribution of the estimates is asymptotically normal to generate confidence intervals. Table 2 shows that this procedure yields approximately nominal coverage rates.
Nonparametric estimators: simulation performance,
| Point | Strategy | Truth | Bias | Std | RMSE | Coverage |
|---|---|---|---|---|---|---|
| 0 | DR-Learner | 0.07 | 0.00 | 0.08 | 0.08 | 94.3 |
| 0 | Plugin | 0.07 |
|
0.03 | 0.03 | — |
| 2 | DR-Learner | 0.11 |
|
0.11 | 0.11 | 92.6 |
| 2 | Plugin | 0.11 |
|
0.03 | 0.05 | — |
As with the projection approach, the corresponding plugin approach has lower RMSE than the DR-Learner. This is likely a function of the inverse-probability weights associated with the DR-Learner, which could cause this result for a fixed sample size.
4.3 Estimation: convergence rates
We conclude by examining the convergence rates of the DR-Learner versus a plugin estimator by specifying the convergence rates of the nuisance estimation. Roughly, we add

Convergence of DR-Learner versus plugin and oracle estimators. Scaled RMSE of each estimation strategy as a function of sample size. “Slow” nuisance function is estimated
The
In Section C of the supplemental materials, we present additional results where we estimate the CIIE as a proportion of the corresponding CATE. We outline two general approaches to this problem: first, where we estimate the CIIE and the CATE and take the ratio of these estimates; second, where we derive the influence function for the mean of the ratio and regress this onto
5 Sensitivity analysis
We next consider estimating
5.1 Setup and notation
First, we assume for simplicity that
Third, for any
Assuming that Y-M ignorability holds when it does not, we define the biased target of our estimator of
Finally, to reduce notation, we let
While we focus the remaining discussion on the case where
5.2 Sensitivity framework
The bias
Proposition 2
Assume that we know some functions
This implies the following bounds:
Different assumptions on the selection process can motivate different functions
Under Assumption 26,
While these assumptions provide bounds on the true outcome model, they imply, but are not equivalent to, bounds on
Proposition 3
Consider assumptions (26)–(28) and a sensitivity parameter
for constants
Remark 4
If we desired bounds at the point
The assumptions outlined in equations (26)–(28) yield different bounds. While (26) is perhaps most intuitive, for a given
Finally, we can extend this general approach in several ways. For example, Assumptions (26)–(28) yield similar bounds for
5.3 Illustration
Figure 5 uses simulated data to illustrate the estimand, the biased target, and the bounds as a function of

Bounds on CIIE. Target estimand in green, biased target of inference in orange. Purple and red lines reflect upper and lower bounds that differ in terms of
5.4 Alternative approach
Tchetgen and Shpitser [22] and VanderWeele and Chiba [23] considered similar approaches for bounds on natural effects under the assumption that M–A and Y–A ignorability holds but that Y–M ignorability does not. Both proposals assume a known selection function that holds with equality rather than inequality. We could modify our proposed approach in a similar spirit. For example, we could assume that for all
We could then recover
While such an assumption would allow us to point identify
5.5 Estimation
We extend all of the aforementioned methods to estimate the bounds on
6 Application
To demonstrate these methods, we revisit the data and application considered in [13], who examined the effect of COVID-19 vaccinations on depression, social isolation, and worries about health during February 2021 using the CTIS. The Delphi group at Carnegie Mellon University conducted the CTIS from April 2020 through June 2022 in collaboration with the Facebook Data for Good group [24]. By using these data, Rubinstein et al. [13] posit a model that COVID-19 vaccinations affect depression via a direct path, social isolation, and worries about health. By using the decomposition from ref. [3], they found that pathways via social isolation were more important than pathways via worries about health in explaining the effect of COVID-19 vaccinations on depression. We refer to that article for details on the data and the limitations of this analysis. While this study examined effect heterogeneity, the authors only examined heterogeneity within discrete subgroups and primarily focused on the outcomes analysis. Moreover, the authors did not find substantial effect heterogeneity with respect to the mediation analysis among the specified subgroups.
We examine the decomposition of the total effect within the following subset of CTIS respondents: employed, non-Hispanic, White respondents aged 25–54 years, with at least a college degree, no chronic health conditions, who work outside the home, and who had previously received an influenza vaccination. This included a total of 13,764 individuals. Table 3 displays the average effect estimates using influence function-based estimators, where the nuisance parameters were estimated using 20 stacked XGBoost models with different hyperparameter settings on the full dataset. While restricted to a much smaller subgroup, these results are qualitatively comparable to the average estimates in ref. [13].
Average effect estimates on CTIS subset in February 2021,
| Estimand | Estimate | Lower 95% CI | Upper 95% CI |
|---|---|---|---|
| Total effect |
|
|
|
| IIE - M1 |
|
|
|
| IIE - M2 |
|
|
|
| IIE - Cov | 0.08 |
|
0.30 |
| IDE |
|
|
|
We next compare whether the interventional effects differed among those who live in counties where Trump led Biden by 50 percentage points in the 2020 election (“Trump counties”), and those where Biden led Trump by 50 percentage points (“Biden counties”). By limiting our sample to the subgroup defined earlier, effect heterogeneity across the Biden vote share may proxy for how social factors may moderate the mediated effects.[12] Specifically, we hypothesize that these relatively educated, vaccine-accepting, and health conscious respondents who live in Trump-voting counties may have lower total effects than those who live in Biden areas due to the added stress of living in areas that generally took relatively fewer COVID precautions. We similarly hypothesize that the effects via worries about health might be lower in Trump-voting counties than Biden-voting counties for this same reason. Figure 6 displays the results using both the DR-Learner and projection estimators at these two points, where we use a simple linear model for the projection.[13] Figure 4 in Section D of the supplemental materials display the entire estimated curves.
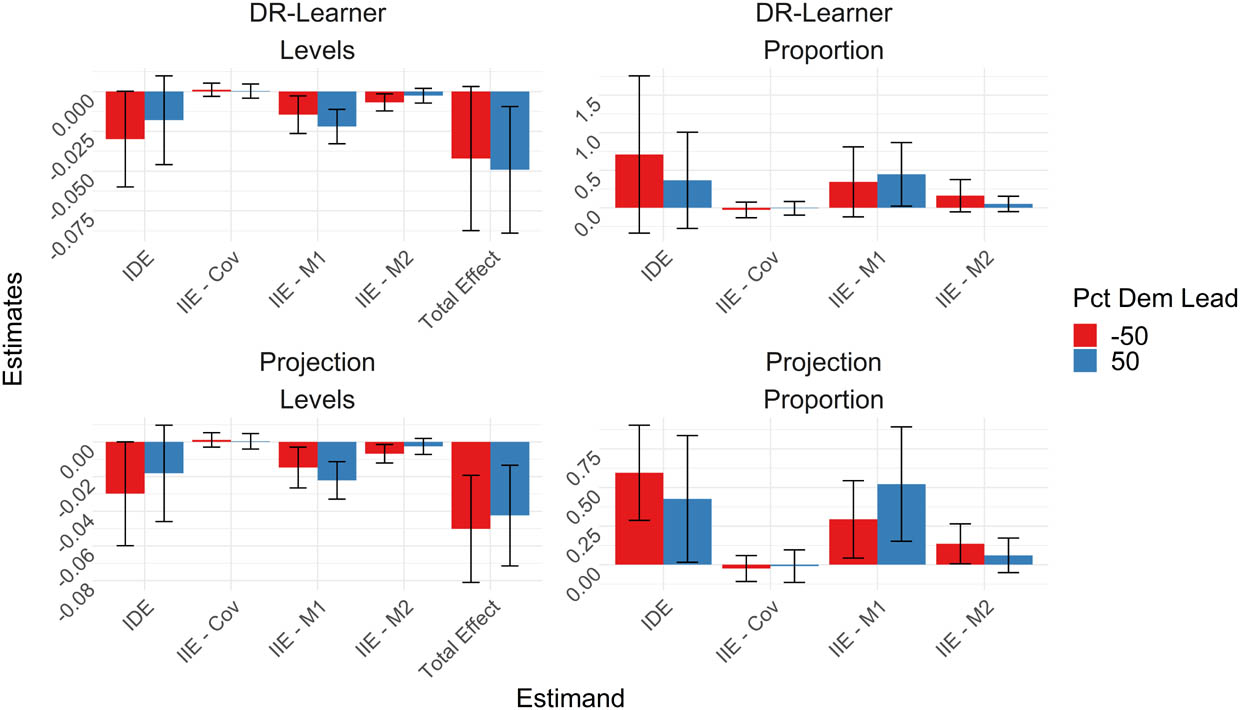
Application results. Conditional total, indirect, and direct effects in Biden (Pct Dem Lead = 50) versus Trump (Pct Dem Lead =
The total effect estimates are comparable in the Trump counties relative to Biden counties; however, the projection estimates are slightly lower in Trump relative to Biden counties, while the DR-Learner suggests that these effects may be slightly higher.[14] On the other hand, the effects via worries about health and social isolation are nearly identical for both the projection-estimator and DR-Learner. As shown in Figure 4 in Section D of the supplemental materials, the chosen smoothing parameter ends up essentially fitting a linear model for all functions other than the total effect. Regardless, the point estimates are consistent with our expectations, where effects via worries about health are lower in Trump counties relative to Biden counties. Meanwhile, effects via isolation appear slightly larger in Trump counties relative to Biden counties. However, all observed differences in these effects are small relative to the uncertainty estimates, and we are unable to draw statistically significant conclusions.
6.1 Sensitivity analysis
We conduct a sensitivity analysis for

Bounds for application. Bounds for average and conditional interventional indirect effects via social isolation as a function of
We find that that our average effect estimates are robust to a
As a point of comparison, if we assumed that no unmeasured confounding held conditional on
where the equality holds via assuming no unmeasured confounding conditional on
7 Discussion
We propose two methods for estimating conditional average interventional indirect effects: a semiparametric projection-based approach and a fully nonparametric approach. These procedures are conceptually simple: regress an estimate of the uncentered influence function for the average parameter onto the desired covariates. The projection-based estimator uses a parametric regression model and therefore targets a projection of the CIIE, while the DR-Learner uses a fully nonparametric model for this regression, and therefore targets the CIIE itself. Our primary contribution is to establish the conditions where the convergence rates of these estimators are equivalent to that of an oracle regression of the true influence function onto these same models. As with estimating the CATE, the error of these estimators is a function of the product of errors in the nuisance estimation. However, unlike the CATE, we must consider the sums of several products of nuisance functions, which is in general a function of the cardinality of the joint mediators. While our discussion focused primarily on estimating the effect via
As a second contribution, we propose a sensitivity analysis for the conditional effects that allows for mediator-outcome confounding. While the resulting bounds may be quite wide in practice, they make only weak assumptions on the underlying confounding mechanisms. Moreover, if one is willing to make stronger assumptions on the selection mechanism, more narrow bounds can be obtained using a slight variant of our approach. We propose a general approach to estimating these bounds using the projection estimators or DR-Learner, where our results are again not tied to any particular estimation method. Our methods also easily extend to estimating bounds on the average effects, allowing for root-n consistent and asymptotically normal estimates under some standard conditions.
Our proposed methods have several limitations: first, we only consider two discrete mediators and a binary treatment. However, we could broaden this general approach for more complex settings. For example, we could likely allow for several mediators by regressing the corresponding influence functions derived by [14] onto
Acknowledgments
The authors would like to thank Amelia Haviland for helpful discussions as this work developed. The authors would also like to thank the two anonymous reviews and the associate editor for helpful comments, questions, and suggestions that improved the quality of this article.
-
Funding information: The authors state no funding involved.
-
Conflict of interest: The authors state no conflict of interest.
-
Data availability statement: The data that support the findings of this study are available from https://dataforgood.facebook.com/dfg/docs/covid-19-trends-and-impact-survey-request-for-data-access but restrictions apply to the availability of these data, which were used under license for the current study, and so are not publicly available. Data are, however, available from the authors upon reasonable request and with permission of Facebook.
References
[1] Miles CH. On the causal interpretation of randomized interventional indirect effects. 2022. http://arXiv.org/abs/arXiv:220300245. 10.1093/jrsssb/qkad066Search in Google Scholar
[2] Didelez V, Dawid AP, Geneletti S. Direct and indirect effects of sequential treatments. In: Proceedings of the Twenty-Second Conference on Uncertainty in Artificial Intelligence; 2006. p. 138–46. Search in Google Scholar
[3] Vansteelandt S, Daniel RM. Interventional effects for mediation analysis with multiple mediators. Epidemiology (Cambridge, Mass). 2017;28(2):258. 10.1097/EDE.0000000000000596Search in Google Scholar PubMed PubMed Central
[4] Loh WW, Moerkerke B, Loeys T, Vansteelandt S. Heterogeneous indirect effects for multiple mediators using interventional effect models. Epidemiol Methods. 2020;9(1):20200023. 10.1515/em-2020-0023Search in Google Scholar
[5] Kennedy EH, Lorch S, Small DS. Robust causal inference with continuous instruments using the local instrumental variable curve. J R Stat Soc Ser B (Stat Meth). 2019;81(1):121–43. 10.1111/rssb.12300Search in Google Scholar
[6] Cuellar M, Kennedy EH. A non-parametric projection-based estimator for the probability of causation, with application to water sanitation in Kenya. J R Stat Soc Ser A (Stat Soc). 2020;183(4):1793–818. 10.1111/rssa.12548Search in Google Scholar
[7] Kennedy EH, Balakrishnan S, Wasserman L. Semiparametric counterfactual density estimation. 2021. http://arXiv.org/abs/arXiv:210212034. Search in Google Scholar
[8] Kennedy EH. Towards optimal doubly robust estimation of heterogeneous causal effects. 2020. https://arxiv.org/abs/2004.14497. Search in Google Scholar
[9] Park S, Qin X, Lee C. Estimation and sensitivity analysis for causal decomposition in health disparity research. Sociol Meth Res. 2022. 10.1177/00491241211067516 Search in Google Scholar
[10] Park S, Esterling KM. Sensitivity analysis for pretreatment confounding with multiple mediators. J Educ Behav Stat. 2021;46(1):85–108. 10.3102/1076998620934500Search in Google Scholar
[11] Imai K, Keele L, Tingley D. A general approach to causal mediation analysis. Psychol Meth. 2010;15(4):309. 10.1037/a0020761Search in Google Scholar PubMed
[12] Lindmark A, de Luna X, Eriksson M. Sensitivity analysis for unobserved confounding of direct and indirect effects using uncertainty intervals. Stat Med. 2018;37(10):1744–62. 10.1002/sim.7620Search in Google Scholar PubMed
[13] Rubinstein M, Haviland A, Breslau J. The effect of COVID-19 vaccinations on self-reported depression and anxiety during February 2021. Stat Public Policy. 2023;10(1):1–24. 10.1080/2330443X.2023.2190008. Search in Google Scholar
[14] Benkeser D, Ran J. Nonparametric inference for interventional effects with multiple mediators. J Causal Infer. 2021;9(1):172–89. 10.1515/jci-2020-0018Search in Google Scholar
[15] Jackson JW. Meaningful causal decompositions in health equity research: definition, identification, and estimation through a weighting framework. Epidemiology. 2020;32(2):282–90. 10.1097/EDE.0000000000001319Search in Google Scholar PubMed PubMed Central
[16] Kennedy EH. Semiparametric doubly robust targeted double machine learning: a review. 2022. http://arXiv.org/abs/arXiv:220306469. Search in Google Scholar
[17] Angrist JD, Pischke JS. Mostly harmless econometrics: an empiricistas companion. Princeton, NJ, United States: Princeton University Press; 2009. 10.1515/9781400829828Search in Google Scholar
[18] Buja A, Brown L, Berk R, George E, Pitkin E, Traskin M, et al. Models as approximations I: consequences illustrated with linear regression. Stat Sci. 2019;34(4):523–44. 10.1214/18-STS693Search in Google Scholar
[19] Tsybakov AB. Introduction to nonparametric estimation. 2009. 10.1007/b13794. Search in Google Scholar
[20] Van der Laan MJ, Polley EC, Hubbard AE. Super learner. Statistical applications in genetics and molecular biology. 2007;6(1). 10.2202/1544-6115.1309.Search in Google Scholar PubMed
[21] Luedtke AR, Diaz I, van der Laan MJ. The statistics of sensitivity analyses. UC Berkeley Division of Biostatistics Working Paper Series. 2015. https://biostats.bepress.com/ucbbiostat/paper341.Search in Google Scholar
[22] Tchetgen EJT, Shpitser I. Semiparametric theory for causal mediation analysis: efficiency bounds, multiple robustness, and sensitivity analysis. Ann Stat. 2012;40(3):1816. 10.1214/12-AOS990Search in Google Scholar PubMed PubMed Central
[23] VanderWeele TJ, Chiba Y. Sensitivity analysis for direct and indirect effects in the presence of exposure-induced mediator-outcome confounders. Epidemiol Biostat Public Health. 2014;11(2):e9027. 10.2427/9027Search in Google Scholar PubMed PubMed Central
[24] Salomon JA, Reinhart A, Bilinski A, Chua EJ, LaMotte-Kerr W, Rönn MM, et al. The US COVID-19 Trends and Impact Survey: Continuous real-time measurement of COVID-19 symptoms, risks, protective behaviors, testing, and vaccination. Proc Nat Acad Sci. 2021;118(51):e2111454118. 10.1073/pnas.2111454118Search in Google Scholar PubMed PubMed Central
[25] Nie X, Wager S. Quasi-oracle estimation of heterogeneous treatment effects. Biometrika. 2021;108(2):299–319. 10.1093/biomet/asaa076Search in Google Scholar
© 2023 the author(s), published by De Gruyter
This work is licensed under the Creative Commons Attribution 4.0 International License.
Articles in the same Issue
- Research Articles
- Adaptive normalization for IPW estimation
- Matched design for marginal causal effect on restricted mean survival time in observational studies
- Robust inference for matching under rolling enrollment
- Attributable fraction and related measures: Conceptual relations in the counterfactual framework
- Causality and independence in perfectly adapted dynamical systems
- Sensitivity analysis for causal decomposition analysis: Assessing robustness toward omitted variable bias
- Instrumental variable regression via kernel maximum moment loss
- Randomization-based, Bayesian inference of causal effects
- On the pitfalls of Gaussian likelihood scoring for causal discovery
- Double machine learning and automated confounder selection: A cautionary tale
- Randomized graph cluster randomization
- Efficient and flexible mediation analysis with time-varying mediators, treatments, and confounders
- Minimally capturing heterogeneous complier effect of endogenous treatment for any outcome variable
- Quantitative probing: Validating causal models with quantitative domain knowledge
- On the dimensional indeterminacy of one-wave factor analysis under causal effects
- Heterogeneous interventional effects with multiple mediators: Semiparametric and nonparametric approaches
- Exploiting neighborhood interference with low-order interactions under unit randomized design
- Robust variance estimation and inference for causal effect estimation
- Bounding the probabilities of benefit and harm through sensitivity parameters and proxies
- Potential outcome and decision theoretic foundations for statistical causality
- 2D score-based estimation of heterogeneous treatment effects
- Identification of in-sample positivity violations using regression trees: The PoRT algorithm
- Model-based regression adjustment with model-free covariates for network interference
- All models are wrong, but which are useful? Comparing parametric and nonparametric estimation of causal effects in finite samples
- Confidence in causal inference under structure uncertainty in linear causal models with equal variances
- Special Issue on Integration of observational studies with randomized trials - Part II
- Personalized decision making – A conceptual introduction
- Precise unbiased estimation in randomized experiments using auxiliary observational data
- Conditional average treatment effect estimation with marginally constrained models
- Testing for treatment effect twice using internal and external controls in clinical trials
Articles in the same Issue
- Research Articles
- Adaptive normalization for IPW estimation
- Matched design for marginal causal effect on restricted mean survival time in observational studies
- Robust inference for matching under rolling enrollment
- Attributable fraction and related measures: Conceptual relations in the counterfactual framework
- Causality and independence in perfectly adapted dynamical systems
- Sensitivity analysis for causal decomposition analysis: Assessing robustness toward omitted variable bias
- Instrumental variable regression via kernel maximum moment loss
- Randomization-based, Bayesian inference of causal effects
- On the pitfalls of Gaussian likelihood scoring for causal discovery
- Double machine learning and automated confounder selection: A cautionary tale
- Randomized graph cluster randomization
- Efficient and flexible mediation analysis with time-varying mediators, treatments, and confounders
- Minimally capturing heterogeneous complier effect of endogenous treatment for any outcome variable
- Quantitative probing: Validating causal models with quantitative domain knowledge
- On the dimensional indeterminacy of one-wave factor analysis under causal effects
- Heterogeneous interventional effects with multiple mediators: Semiparametric and nonparametric approaches
- Exploiting neighborhood interference with low-order interactions under unit randomized design
- Robust variance estimation and inference for causal effect estimation
- Bounding the probabilities of benefit and harm through sensitivity parameters and proxies
- Potential outcome and decision theoretic foundations for statistical causality
- 2D score-based estimation of heterogeneous treatment effects
- Identification of in-sample positivity violations using regression trees: The PoRT algorithm
- Model-based regression adjustment with model-free covariates for network interference
- All models are wrong, but which are useful? Comparing parametric and nonparametric estimation of causal effects in finite samples
- Confidence in causal inference under structure uncertainty in linear causal models with equal variances
- Special Issue on Integration of observational studies with randomized trials - Part II
- Personalized decision making – A conceptual introduction
- Precise unbiased estimation in randomized experiments using auxiliary observational data
- Conditional average treatment effect estimation with marginally constrained models
- Testing for treatment effect twice using internal and external controls in clinical trials