1 Introduction
Let M be a hypersurface in an (n + 1)-dimensional Riemannian manifold and denote by k
1, …, k
n
its principal curvatures. The r-th mean curvature of M is the elementary symmetric polynomial H
r
in the variables k
i
defined as
n
r
H
r
≔
∑
i
1
<
…
<
i
r
k
i
1
k
i
2
…
k
i
r
.
We say that M is an H
r
-hypersurface when H
r
is a positive constant for some r ∈ {1, …, n}. Note in particular that H
1 is the mean curvature of M. In his pioneering work [1], Reilly showed that H
r
-hypersurfaces in space forms appear as solutions of a variational problem, thus extending the corresponding property of constant mean curvature surfaces. Earlier, Alexandrov had dealt with higher mean curvature functions in a series of papers [2], and later on many existence and classification results were achieved in space forms. A list of contributions to this subject (far from exhaustive) is [3], [4], [5], [6], [7], [8], [9], [10], [11], [12], [13], [14], [15], [16].
Studies on H
r
-hypersurfaces in more general ambient manifolds appeared in the literature more recently, see for example [17], [18], [19], [20]. Most notable for us are the results of Elbert and Sa Earp [21] on H
r
-hypersurfaces in
H
n
×
R
, where
H
n
is the hyperbolic space and de Lima–Manfio–dos Santos [22] on H
r
-hypersurfaces in
N
×
R
, where N is a Riemannian manifold.
The goal of this paper is two-fold. Our first result is a complete classification of rotationally invariant H
r
-hypersurfaces in
H
n
×
R
. Note that
H
n
×
R
has non-constant sectional curvature, but it is symmetric enough to allow a fruitful investigation of invariant hypersurfaces. The mean curvature case r = 1 has already been studied by Hsiang–Hsiang in [7] and Bérard and Sa Earp [23]. A general study of H
r
-hypersurfaces invariant by an ambient isometry in
N
×
R
, with N a Riemannian manifold, has been carried out by de Lima–Manfio–dos Santos [22]. We point out that part of our classification results are included in [22], but our description and focus are different in nature for several reasons. First, we use a parametrization that allows us to consider and analyze hypersurfaces with singularities. In fact, we get 13 different qualitative behaviors for rotational H
r
-hypersurfaces in
H
n
×
R
. Moreover, we always include the case n = r, which often produces exceptional examples. Finally, we provide detailed topological and geometric descriptions for all values of the parameters involved.
The geometry of H
r
-hypersurfaces with r ≥ 2 is substantially different than that of constant mean curvature hypersurfaces. This is mainly due to the full non-linearity of the relation among the principal curvatures, in contrast with the quasi-linearity of the mean curvature equation. Most importantly, many singular cases arise and need to be classified. For instance, one gets conical singularities, which are not allowed in the constant mean curvature case. Our classification results are summarized in Tables 1
–3.
We recall that H
r
-hypersurfaces invariant by rotations in space forms were studied by Leite and Mori [8], [9] for the case r = 2, and Palmas [13] for any r.
Our second goal is to understand the topology of embedded H
r
-hypersurfaces in
H
n
×
[
0
,
∞
)
with boundary in the horizontal slice
H
n
×
{
0
}
. We prove the following Ros–Rosenberg type theorem.
Theorem
Let M be a compact connected hypersurface in
H
n
×
[
0
,
∞
)
with constant H
r
> (n − r)/n and boundary in the slice
H
n
×
{
0
}
. When the boundary is sufficiently small and horoconvex, then M is a topological disk.
Horoconvexity of the boundary is a natural assumption in the hyperbolic space, whereas what “sufficiently small” means will be explained more precisely in Section 6, cf. Theorem 6.1. A fundamental tool in our proof is Alexandrov reflection tecnhique, for which one needs a tangency principle. For H
r
-hypersurfaces in Riemannian manifolds, such a tangency principle is proved by Fontenele–Silva [24] under suitable assumptions. We point out that the geometry of our hypersurfaces implies the existence of a strictly convex point, which guarantees the validity of the tangency principle (see Remark 6.3).
Analogous results as in the above theorem for the constant mean curvature case are due to Ros–Rosenberg in
R
3
[25, Theorem 1], Semmler in
H
3
[26, Theorem 2], and Nelli–Pipoli in
H
n
×
R
[27, Theorem 4.1]. For H
r
-hypersurfaces in Euclidean space, Ros–Rosenberg theorem is proved by Nelli–Semmler [11, Theorem 1.2].
In order to prove our Ros–Rosenberg type theorem we also need to discuss certain H
r
-hypersurfaces that are invariant under hyperbolic translation.
The structure of the paper is the following. In Section 2 we classify H
r
-hypersurfaces in
H
n
×
R
with rotational symmetry. Since the cases r even and odd exhibit substantial differences, we treat them separately in two subsections. At the end of each one, we provide complete descriptions of the various hypersurfaces that occur, see Theorems 2.9–2.12, 2.21–2.24, and Tables 1
–3. In Section 3 we study specific translation H
r
-hypersurfaces, cf. Theorem 3.5. Finally, in Section 4 and 5 we provide useful estimates and tools to be employed in Section 6, where we prove Ros–Rosenberg’s Theorem (see Theorem 6.1).
2 Classification of rotation H
r
-hypersurfaces
We will generally use the Poincaré model of the hyperbolic space
H
n
, n ≥ 2. This is defined as the open ball of Euclidean unit radius in
R
n
centered at the origin, and is equipped with the metric
g
̃
that at a point
x
∈
H
n
takes the form
g
̃
x
≔
2
1
−
‖
x
‖
2
2
d
x
1
2
+
⋯
+
d
x
n
2
,
where ‖ ⋅‖ denotes the Euclidean norm, and
(
x
i
)
i
are the standard coordinates in
R
n
. We work with the Riemannian cylinder
H
n
×
R
with product metric
g
≔
g
̃
+
d
t
2
, where t is a global coordinate on the
R
factor.
In order to describe rotational hypersurfaces inside
H
n
×
R
we follow [21]. Up to isometry of the ambient space, a rotationally invariant hypersurface is determined by rotation of a profile curve contained in a vertical plane through the origin inside
H
n
×
R
. Let us take the plane
V
≔
(
x
1
,
…
,
x
n
,
t
)
∈
H
n
×
R
:
x
1
=
⋯
=
x
n
−
1
=
0
,
and consider the curve parametrized by ρ > 0 given as
x
n
=
tanh
(
ρ
/
2
)
,
t
=
λ
(
ρ
)
.
The function λ will be determined by imposing that the rotational hypersurface generated by the profile curve have r-th mean curvature equal to a positive constant. We already defined the r-th mean curvature in the Introduction, but we write it here for further references.
Definition 2.1
Let k
1, …, k
n
be the principal curvatures of an immersed hypersurface in any Riemannian manifold. The r-th mean curvature H
r
is the elementary symmetric polynomial defined as
n
r
H
r
≔
∑
i
1
<
⋯
<
i
r
k
i
1
k
i
2
…
k
i
r
.
Rotating the curve about the line
{
0
}
×
R
generates a hypersurface with parametrization
R
+
×
S
n
−
1
→
H
n
×
R
,
(
ρ
,
ξ
)
↦
(
tanh
(
ρ
/
2
)
ξ
,
λ
(
ρ
)
)
.
The unit normal field to the immersion is
ν
=
1
(
1
+
λ
̇
2
)
1
2
−
λ
̇
2
cosh
2
(
ρ
/
2
)
ξ
,
1
,
and the associated principal curvatures are
(1)
k
1
=
⋯
=
k
n
−
1
=
c
o
t
g
h
(
ρ
)
λ
̇
(
1
+
λ
̇
2
)
1
2
,
k
n
=
λ
̈
(
1
+
λ
̇
2
)
3
2
,
where
λ
̇
denotes the derivative of λ with respect to ρ. By applying suitable vertical reflections or translations of the hypersurface generated by the curve defined by λ, one gets several types of rotationally invariant hypersurfaces. Care should be taken when applying the transfomation λ↦ − λ, as this changes the orientation of the hypersurface. However, setting ν↦ − ν leaves the signs of each k
i
unchanged. Hereafter we classify those rotationally invariant hypersurfaces with positive constant r-th mean curvature.
Specializing the expression of the r-th mean curvature to the case k
1 = ⋯ = k
n−1 and k
n
as in (1) we find
n
H
r
=
(
n
−
r
)
c
o
t
g
h
r
(
ρ
)
λ
̇
r
(
1
+
λ
̇
2
)
r
2
+
c
o
t
g
h
r
−
1
(
ρ
)
r
λ
̇
r
−
1
λ
̈
(
1
+
λ
̇
2
)
r
+
2
2
.
If we divide by cosh
r−1(ρ) and multiply by sinh
n−1(ρ) both sides of the identity, we can rewrite the above as
(2)
n
sinh
n
−
1
(
ρ
)
cosh
r
−
1
(
ρ
)
H
r
=
d
d
ρ
sinh
n
−
r
(
ρ
)
λ
̇
r
(
1
+
λ
̇
2
)
r
2
,
r
=
1
,
…
,
n
.
Choose now H
r
to be a positive constant, and define the function
I
n
,
r
(
ρ
)
≔
∫
0
ρ
sinh
n
−
1
(
τ
)
cosh
r
−
1
(
τ
)
d
τ
.
We can then integrate (2) once to obtain
(3)
n
H
r
I
n
,
r
(
ρ
)
+
d
r
=
sinh
n
−
r
(
ρ
)
λ
̇
r
(
1
+
λ
̇
2
)
r
2
,
where d
r
is an integration constant depending on r. Then one integrates again to find (up to a sign for r even)
(4)
λ
H
r
,
d
r
(
ρ
)
=
∫
ρ
−
ρ
(
n
H
r
I
n
,
r
(
ξ
)
+
d
r
)
1
r
sinh
2
(
n
−
r
)
r
(
ξ
)
−
(
n
H
r
I
n
,
r
(
ξ
)
+
d
r
)
2
r
d
ξ
,
where ρ
− ≥ 0 is the infimum of the set where the integrand function makes sense. One should think of λ as a one-parameter family of functions depending on d
r
. We write
λ
H
r
,
d
r
as in (4) to make the dependence on H
r
and d
r
more explicit.
Remark 2.2
When r is even, the right-hand side in (3) is non-negative, which forces the left-hand side to be non-negative as well. In this case −λ satisfies (3). When r is odd, identity (3) implies that
λ
̇
has the same sign of nH
r
I
n,r
+ d
r
. Moreover, −λ satisfies (3) only after changing ν↦ − ν. Lastly, critical points for
λ
H
r
,
d
r
are zeros of nH
r
I
n,r
+ d
r
. The second derivative of
λ
H
r
,
d
r
is computed as
(5)
λ
̈
H
r
,
d
r
(
ρ
)
=
cosh
(
ρ
)
sinh
2
(
n
−
r
)
r
−
1
(
ρ
)
n
H
r
sinh
n
(
ρ
)
cosh
r
(
ρ
)
−
(
n
−
r
)
(
n
H
r
I
n
,
r
(
ρ
)
+
d
r
)
r
(
n
H
r
I
n
,
r
(
ρ
)
+
d
r
)
r
−
1
r
sinh
2
(
n
−
r
)
r
(
ρ
)
−
(
n
H
r
I
n
,
r
(
ρ
)
+
d
r
)
2
r
3
2
.
We will refer to this expression when studying the convexity of
λ
H
r
,
d
r
and its regularity up to second order. Note that if r > 1 the second derivative of
λ
H
r
,
d
r
is not defined at its critical points.
Remark 2.3
Let us discuss a few more details on I
n,r
. It is clear that I
n,r
(0) = 0 and
I
n
,
r
′
(
0
)
=
0
. Also,
I
n
,
r
′
(
ρ
)
>
0
and
I
n
,
r
″
(
ρ
)
>
0
for ρ > 0 and all n ≥ r ≥ 1, so I
n,r
is a non-negative increasing convex function. For all values n ≥ r we have nI
n,r
(ρ) ≈ ρ
n
for ρ → 0. Moreover, for n > r, one has the asymptotic behavior (n − r)I
n,r
(ρ) ≈ sinh
n−r
(ρ) for ρ → +∞, whereas for n = r we have I
n,n
(ρ) ≈ ρ for ρ → +∞.
Next, we analyze
λ
H
r
,
d
r
as in (4) for all values of r = 1, …, n, H
r
> 0, and
d
r
∈
R
. The goal is to find the domain of
λ
H
r
,
d
r
, study its qualitative behavior, and describe the rotational H
r
-hypersurfaces generated by the graph of
λ
H
r
,
d
r
, including the description of their singularities. This can be thought of as a classification à la Delaunay of rotational H
r
-hypersurfaces in
H
n
×
R
. Note that we choose n, r, and H
r
> 0 a priori, so that the family of functions
λ
H
r
,
d
r
really depends only on the parameter d
r
. We will find a critical value of H
r
, namely (n − r)/n, which we use together with the sign of d
r
and the parity of r to distinguish various cases. Also, we discuss n > r and n = r separately, as the latter case exhibits substantial differences from the former. One may find the salient properties of the classified hypersurfaces in Tables 1
–3 at the end of this section.
2.1 Case r even
We start by proving the following result.
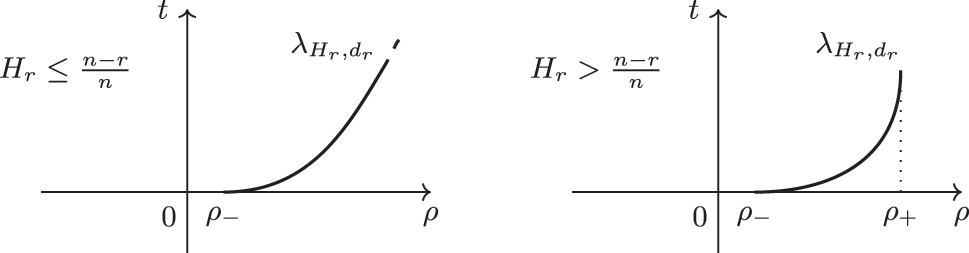
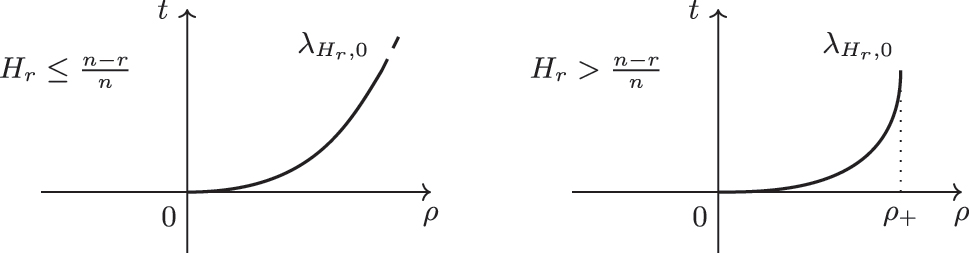
Proposition 2.4
Assume r even, n > r, and d
r
≤ 0.
If 0 < H
r
≤ (n − r)/n, then
λ
H
r
,
d
r
is defined on [ρ
−, + ∞), where ρ
− ≥ 0 is the only solution of nH
r
I
n,r
(ρ) + d
r
= 0.
If H
r
> (n − r)/n, then
λ
H
r
,
d
r
is defined on [ρ
−, ρ
+], where ρ
− is as above, and ρ
+ > 0 is the only solution of sinh
n−r
(ρ) − (nH
r
I
n,r
(ρ) + d
r
) = 0.
Further,
λ
H
r
,
d
r
is increasing and convex in the interior of its domain. Also,
λ
H
r
,
d
r
(
ρ
−
)
=
0
=
lim
ρ
→
ρ
−
λ
̇
H
r
,
d
r
(
ρ
)
. In case (1),
λ
H
r
,
d
r
is unbounded. In case
(
2
)
lim
ρ
→
ρ
+
λ
̇
H
r
,
d
r
(
ρ
)
=
+
∞
. In both cases, d
r
= 0 if and only if ρ
− = 0. We have
lim
ρ
→
0
λ
̈
H
r
,
0
(
ρ
)
=
H
r
1
/
r
, and for d
r
< 0 one finds
lim
ρ
→
ρ
−
λ
̈
H
r
,
d
r
(
ρ
)
=
+
∞
(Figure 1).
Proof
The function nH
r
I
n,r
+ d
r
must be non-negative as noted in Remark 2.2, hence
λ
H
r
,
d
r
is well-defined when
0
≤
n
H
r
I
n
,
r
(
ρ
)
+
d
r
<
sinh
n
−
r
(
ρ
)
.
There is a unique value ρ
− ≥ 0 depending on d
r
such that nH
r
I
n,r
(ρ
−) + d
r
= 0, and Remark 2.3 implies d
r
= 0 if and only if ρ
− = 0. Set
f
(
ρ
)
≔
sinh
n
−
r
(
ρ
)
−
(
n
H
r
I
n
,
r
(
ρ
)
+
d
r
)
,
ρ
≥
0
.
Then f(ρ
−) ≥ 0 and f′(ρ) = sinh
n−r−1(ρ)cosh(ρ)((n − r) − nH
r
tanh
r
(ρ)). We have f′(ρ) > 0 for ρ > ρ
− when tanh
r
(ρ) < (n − r)/nH
r
. So if 0 < H
r
≤ (n − r)/n the inequality is always true, and f has no zeros in (ρ
−, + ∞). If H
r
> (n − r)/n then lim
ρ→+∞
f′(ρ) = −∞, so f eventually decreases to −∞. This implies f has a zero ρ
+ > ρ
− depending on the value of d
r
.
It follows that
λ
H
r
,
d
r
is defined on some interval with ρ
− as minimum. If 0 < H
r
≤ (n − r)/n then the interval is unbounded. We have
λ
H
r
,
d
r
(
ρ
−
)
=
0
=
lim
ρ
→
ρ
−
λ
̇
H
r
,
d
r
(
ρ
)
, and
lim
ρ
→
+
∞
λ
H
r
,
d
r
(
ρ
)
=
+
∞
by the asymptotic behavior of I
n,r
noted in Remark 2.3. Moreover,
λ
H
r
,
d
r
is increasing as the integrand function is positive away from ρ
−. If H
r
> (n − r)/n then the denominator of the integrand function has a zero ρ
+ depending on d
r
. This means
λ
H
r
,
d
r
is defined on [ρ
−, ρ
+), and its slope tends to +∞ when ρ → ρ
+. We claim that
λ
H
r
,
d
r
is finite at ρ
+. Convergence of the integral is essentially determined by the behavior of
h
(
ρ
)
≔
sinh
n
−
r
r
(
ρ
)
−
(
n
H
r
I
n
,
r
(
ρ
)
+
d
r
)
1
r
near ρ
+. But h(ρ
+) = 0, and h′(ρ
+) is finite, which implies that
λ
H
r
,
d
r
behaves as the integral of
1
/
(
ρ
+
−
ρ
)
1
/
2
for ρ close to ρ
+, whence convergence at ρ
+.
In order to check convexity on (ρ
−, ρ
+), observe that the sign of
λ
̈
H
r
,
d
r
as in (5) is determined by the sign of
g
(
ρ
)
≔
sinh
n
(
ρ
)
cosh
r
(
ρ
)
−
(
n
−
r
)
I
n
,
r
(
ρ
)
−
d
r
(
n
−
r
)
n
H
r
.
We trivially have g(ρ
−) ≥ 0 and g′(ρ) = rsinh
n−1(ρ)/cosh
r+1(ρ) > 0, so that g(ρ) is always positive for ρ > 0. Continuity of the second derivative of
λ
H
r
,
d
r
at the origin for d
r
= 0 follows by an explicit calculation using Remark 2.3, whereas the statement
lim
ρ
→
ρ
−
λ
̈
H
r
,
d
r
(
ρ
)
=
∞
for d
r
< 0 is trivial, cf. (5).□
We now go on with the analysis of the case d
r
> 0, but we first make a few technical considerations. For r > 2 we have the following formula, which can be proved via integration by parts:
(6)
I
r
+
1
,
r
(
x
)
=
−
sinh
r
−
1
(
x
)
(
r
−
2
)
cosh
r
−
2
(
x
)
+
r
−
1
r
−
2
I
r
−
1
,
r
−
2
(
x
)
.
Recall that for a natural number m the double factorial is m!! ≔ m(m − 2)!!, and 1!! = 0!! = 1. Now take r > 2 even. From the recurrence relation (6) we derive the following closed expression for I
r+1,r
(x):
(7)
I
r
+
1
,
r
(
x
)
=
−
sinh
(
x
)
1
r
−
2
tanh
r
−
2
(
x
)
+
r
−
1
(
r
−
2
)
(
r
−
4
)
tanh
r
−
4
(
x
)
+
(
r
−
1
)
(
r
−
3
)
(
r
−
2
)
(
r
−
4
)
(
r
−
6
)
tanh
r
−
6
(
x
)
+
⋯
+
(
r
−
1
)
‼
3
(
r
−
2
)
‼
tanh
2
(
x
)
+
(
r
−
1
)
‼
(
r
−
2
)
‼
I
3,2
(
x
)
.
The explicit expression I
3,2(x) = sinh(x) − arctan(sinh(x)) returns now a closed formula for each I
r+1,r
(x). We note here a useful identity which can be proved by induction.
Lemma 2.5
Let r ≥ 2 be an even natural number. Then
(
r
−
1
)
‼
(
r
−
2
)
‼
=
1
+
1
r
−
2
+
r
−
1
(
r
−
2
)
(
r
−
4
)
+
(
r
−
1
)
(
r
−
3
)
(
r
−
2
)
(
r
−
4
)
(
r
−
6
)
+
+
⋯
+
(
r
−
1
)
‼
3
(
r
−
2
)
‼
,
where, for all r, the sum on the right-hand side must be truncated in such a way that all summands exist.
We shall see that when d
r
> 0 then
λ
H
r
,
d
r
is not well-defined for d
r
too large. We will combine (7) and Lemma 2.5 to give a precise upper bound for d
r
when n = r + 1 and H
r
= (n − r)/n = 1/(r + 1).
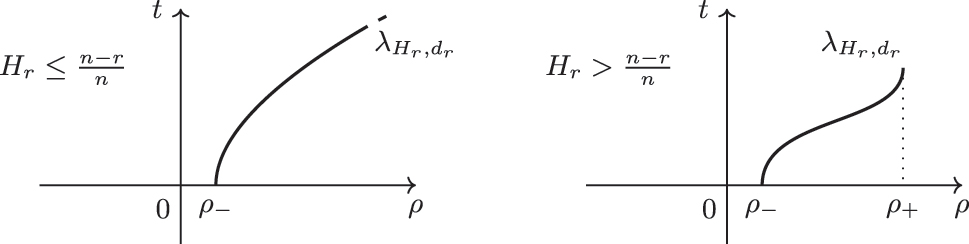
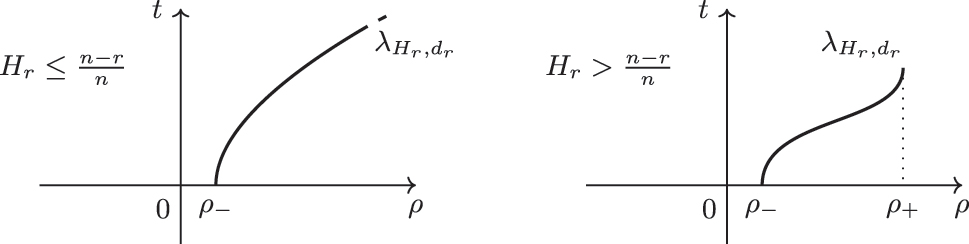
Proposition 2.6
Assume r even, n > r, and d
r
> 0.
If 0 < H
r
< (n − r)/n, then
λ
H
r
,
d
r
is defined on [ρ
−, + ∞), where ρ
− > 0 is the only solution of sinh
n−r
(ρ) − (nH
r
I
n,r
(ρ) + d
r
) = 0 on (0, ∞).
If H
r
= (n − r)/n, then when n = r + 1 we need d
r
< (r − 1)!!π/2(r − 2)!! for
λ
H
r
,
d
r
to be well-defined, whereas for n > r + 1 we have no constraint. Under such conditions, the results in the previous point hold.
If H
r
> (n − r)/n, set τ > 0 such that tanh
r
(τ) = (n − r)/nH
r
. Then d
r
< sinh
n−r
(τ) − nH
r
I
n,r
(τ) for
λ
H
r
,
d
r
to be defined. So
λ
H
r
,
d
r
is a function on [ρ
−, ρ
+] ⊂ (0, + ∞), where sinh
n−r
(ρ
±) − (nH
r
I
n,r
(ρ
±) + d
r
) = 0.
Further,
λ
H
r
,
d
r
is increasing in the interior of its domain. In cases (1)–(2),
λ
H
r
,
d
r
(
ρ
−
)
=
0
,
lim
ρ
→
ρ
−
λ
̇
H
r
,
d
r
(
ρ
)
=
+
∞
,
λ
H
r
,
d
r
is unbounded, and is concave in the interior of its domain. In case (3),
λ
H
r
,
d
r
(
ρ
−
)
=
0
,
lim
ρ
→
ρ
±
λ
̇
H
r
,
d
r
(
ρ
)
=
+
∞
,
λ
H
r
,
d
r
has a unique inflection point in (ρ
−, ρ
+), and goes from being concave to convex (Figure 2).
Proof
We have the constraint 0 ≤ nH
r
I
n,r
(ρ) + d
r
< sinh
n−r
(ρ) for ρ > 0. Since I
n,r
(0) = 0 and d
r
> 0 we must have ρ
− > 0. Such a ρ
− exists only if
f
(
ρ
)
≔
sinh
n
−
r
(
ρ
)
−
(
n
H
r
I
n
,
r
(
ρ
)
+
d
r
)
has a zero. We have f(0) < 0 and
f
′
(
ρ
)
=
sinh
n
−
r
−
1
(
ρ
)
cosh
(
ρ
)
(
n
−
r
)
−
n
H
r
tanh
r
(
ρ
)
.
For 0 < H
r
< (n − r)/n the derivative f′ is always positive and tends to +∞ as ρ runs to ∞, so ρ
− exists and
λ
H
r
,
d
r
is defined on [ρ
−, + ∞). For H
r
= (n − r)/n we have a more subtle behavior. We compute
1
n
−
r
lim
ρ
→
∞
f
′
(
ρ
)
=
lim
ρ
→
∞
sinh
n
−
r
−
1
(
ρ
)
cosh
(
ρ
)
(
1
−
tanh
r
(
ρ
)
)
=
lim
ρ
→
∞
sinh
n
−
r
−
1
(
ρ
)
cosh
r
(
ρ
)
−
sinh
r
(
ρ
)
cosh
r
−
1
(
ρ
)
=
lim
ρ
→
∞
sinh
n
−
r
−
1
(
ρ
)
(
cosh
(
ρ
)
−
sinh
(
ρ
)
)
∑
i
=
0
r
−
1
cosh
r
−
1
−
i
(
ρ
)
sinh
i
(
ρ
)
cosh
r
−
1
(
ρ
)
=
lim
ρ
→
∞
sinh
n
−
r
−
1
(
ρ
)
cosh
(
ρ
)
+
sinh
(
ρ
)
∑
i
=
0
r
−
1
tanh
i
(
ρ
)
.
When n = r + 2 the limit of f′ is r, and if n > r + 2 the limit is +∞. In these two cases ρ
− exists and
λ
H
r
,
d
r
is defined on [ρ
−, ∞). The case n = r + 1 needs to be studied separately, as the limit vanishes. The claim is that for any r even we have that ρ
− exists only if
d
r
<
(
r
−
1
)
‼
(
r
−
2
)
‼
π
2
.
Indeed, when r = 2 we compute
lim
ρ
→
+
∞
sinh
(
ρ
)
−
∫
0
ρ
sinh
2
(
σ
)
cosh
(
σ
)
d
σ
−
d
2
=
lim
ρ
→
+
∞
(
arctan
(
sinh
(
ρ
)
)
−
d
2
)
=
π
2
−
d
2
.
In this case, f cannot have a zero if d
2 ≥ π/2. To prove the above claim for r ≥ 4, we use (7) and find
f
(
ρ
)
=
sinh
(
ρ
)
−
I
r
+
1
,
r
(
ρ
)
−
d
r
=
sinh
(
ρ
)
1
+
1
r
−
2
tanh
r
−
2
(
ρ
)
+
r
−
1
(
r
−
2
)
(
r
−
4
)
tanh
r
−
4
(
ρ
)
+
⋯
+
(
r
−
1
)
(
r
−
3
)
⋯
5
(
r
−
2
)
(
r
−
4
)
⋯
2
tanh
2
(
ρ
)
−
(
r
−
1
)
‼
(
r
−
2
)
‼
+
(
r
−
1
)
‼
(
r
−
2
)
‼
arctan
(
sinh
(
ρ
)
)
−
d
r
.
Now Lemma 2.5 implies that when ρ → +∞ the sum of the terms into brackets goes to zero, and the product of sinh(ρ) with the latter vanishes (one can use the estimates sinh(ρ) ≈ e
ρ
/2 and tanh(ρ) ≈ 1 − 2e
−2ρ
for ρ → +∞ to see this). Hence
lim
ρ
→
+
∞
f
(
ρ
)
=
(
r
−
1
)
‼
(
r
−
2
)
‼
π
2
−
d
r
,
and the claim is proved. Convergence of
λ
H
r
,
d
r
at ρ
− follows by a similar argument as in the proof of Proposition 2.4.
If H
r
> (n − r)/n there is a τ > 0 such that f is increasing on (0, τ) and decreasing on (τ, + ∞). Such a τ satisfies tanh
r
(τ) = (n − r)/nH
r
. In order to have a well-defined
λ
H
r
,
d
r
, we necessarily want f(τ) > 0, which forces the condition
d
r
<
sinh
n
−
r
(
τ
)
−
n
H
r
I
n
,
r
(
τ
)
.
Since f′(ρ
−) > 0, f′(ρ
+) < 0, then f vanishes at ρ
− and ρ
+ with order 1. This gives convergence of
λ
H
r
,
d
r
at the boundary points. We have
λ
H
r
,
d
r
(
ρ
−
)
=
0
,
λ
H
r
,
d
r
(
ρ
+
)
>
0
, and
lim
ρ
→
ρ
±
λ
̇
H
r
,
d
r
(
ρ
)
=
+
∞
at once.
We finally discuss convexity of
λ
H
r
,
d
r
by proceeding as in the case d
r
≤ 0. The sign of the second derivative is determined by the sign of
g
(
ρ
)
≔
sinh
n
(
ρ
)
cosh
r
(
ρ
)
−
(
n
−
r
)
I
n
,
r
(
ρ
)
−
d
r
(
n
−
r
)
n
H
r
.
By definition of ρ
−, the sign of g(ρ
−) is determined by the sign of tanh
r
(ρ
−) − (n − r)/nH
r
. When nH
r
> n − r, then the above quantity is negative as
tanh
r
(
ρ
−
)
−
n
−
r
n
H
r
=
tanh
r
(
ρ
−
)
−
tanh
r
(
τ
)
.
Similarly, g(ρ
+) > 0. Since g′(ρ) > 0,
λ
H
r
,
d
r
has a unique inflection point, and goes from being concave to convex. If nH
r
≤ n − r, we have lim
ρ→+∞
g(ρ) = −d
r
(n − r)/nH
r
< 0 by Remark 2.3. But g is an increasing function, so it is always negative, and hence
λ
H
r
,
d
r
is concave.□
There remains to look at the case n = r. Set
I
n
(
ρ
)
≔
I
n
,
n
(
ρ
)
=
∫
0
ρ
tanh
n
−
1
(
τ
)
d
τ
.
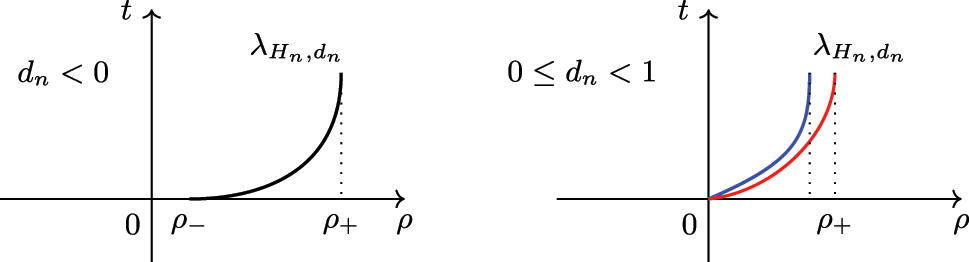
Proposition 2.7
Assume n = r even. Then
λ
H
n
,
d
n
is well-defined for d
n
< 1.
If d
n
< 0, then
λ
H
n
,
d
n
is defined on [ρ
−, ρ
+], where ρ
− is the only solution of nH
n
I
n
(ρ) + d
n
= 0, and ρ
+ is the only solution of nH
n
I
n
(ρ) + d
n
= 1.
If 0 ≤ d
n
< 1, then
λ
H
n
,
d
n
is defined on [0, ρ
+], where ρ
+ is defined as above.
Further,
λ
H
n
,
d
n
is increasing and convex in the interior of its domain. In case (1),
λ
H
n
,
d
n
(
ρ
−
)
=
0
=
λ
̇
H
n
,
d
n
(
ρ
−
)
, and
lim
ρ
→
ρ
+
λ
̇
H
n
,
d
n
(
ρ
)
=
+
∞
. In case (2),
λ
H
n
,
d
n
(
0
)
=
0
,
λ
̇
H
n
,
d
n
(
ρ
−
)
=
d
n
1
/
n
/
1
−
d
n
2
/
n
1
/
2
, and
lim
ρ
→
ρ
+
λ
̇
H
n
,
d
n
(
ρ
)
=
+
∞
. In the particular case d
n
= 0, we also have
lim
ρ
→
0
λ
̈
H
n
,
0
(
ρ
)
=
H
n
1
/
n
, and if d
n
< 0 then
lim
ρ
→
ρ
−
λ
̈
H
r
,
d
r
(
ρ
−
)
=
+
∞
(Figure 3).
Proof
Our usual constraint becomes
0
≤
n
H
n
I
n
(
ρ
)
+
d
n
<
1
.
Hence necessarily d
n
< 1. If d
n
< 0 there are positive numbers ρ
−, ρ
+ such that nH
n
I
n
(ρ
−) + d
n
= 0 and nH
n
I
n
(ρ
+) + d
n
= 1, and
λ
H
n
,
d
n
is defined on [ρ
−, ρ
+). Clearly
λ
̇
H
n
,
d
n
(
ρ
−
)
=
0
. If 0 ≤ d
n
< 1, then
λ
H
n
,
d
n
is defined on [0, ρ
+). We have
λ
̇
H
n
,
d
n
(
0
)
=
d
n
1
/
n
/
1
−
d
n
2
/
n
1
/
2
. The same method as in the proof of Proposition 2.4 shows that in both cases
λ
H
n
,
d
n
is finite at ρ
+. The expression of
λ
̈
H
r
,
d
r
in (5) for n = r implies convexity of the graphs at once. Continuity of the second derivative at the origin for d
n
= 0 follows by an explicit calculation, cf. (5) and Remark 2.3.□
We now study the regularity of the H
r
-hypersurface generated by rotating the graph of
λ
H
r
,
d
r
, as described at the beginning of Section 2. Then we will proceed with the classification result.
Proposition 2.8
Let n ≥ r, r even. Then the hypersurface generated by the curve defined by
λ
H
r
,
d
r
is of class C
2 at ρ = ρ
+, when the latter exists, and it is of class C
2 at ρ = ρ
− if and only if n > r and d
r
≥ 0 or n = r and d
n
= 0. When n = r and d
n
> 0, it has a conical singularity at ρ = 0. If n ≥ r and d
r
< 0, it has cuspidal singularities at ρ = ρ
−.
Proof
Regularity to second order of the hypersurface generated by the graph of
λ
H
r
,
d
r
is proved by showing that the second fundamental form A is bounded.
For any choice of n ≥ r, H
r
and d
r
for which ρ
+ exists, we have that ρ
+ > 0 and
lim
ρ
→
ρ
+
λ
̇
H
r
,
d
r
(
ρ
)
=
+
∞
. By (1), for any i = 1, …, n − 1 we have that
lim
ρ
→
ρ
+
k
i
(
ρ
)
=
c
o
t
g
h
(
ρ
+
)
.
By definition of ρ
+, combining (1) and (5) one finds
lim
ρ
→
ρ
+
k
n
(
ρ
)
=
c
o
t
g
h
(
ρ
+
)
r
(
n
H
r
tanh
(
ρ
+
)
−
(
n
−
r
)
)
.
It follows that
lim
ρ
→
ρ
+
|
A
|
2
(
ρ
)
exists and is finite.
Assume now that n > r and d
r
> 0, then ρ
− > 0 and
lim
ρ
→
ρ
−
λ
̇
H
r
,
d
r
(
ρ
)
=
+
∞
. Therefore
lim
ρ
→
ρ
−
|
A
|
2
(
ρ
)
exists and is finite by arguing as above.
When d
r
= 0 we have ρ
− = 0. By Remark 2.3, (1) and (5), as ρ → 0 we get the estimates
c
o
t
g
h
(
ρ
)
≈
ρ
−
1
,
λ
̇
H
r
,
d
r
(
ρ
)
≈
H
r
1
r
ρ
,
λ
̈
H
r
,
d
r
(
ρ
)
≈
H
r
1
r
.
For any i = 1, …, n it follows that
lim
ρ
→
0
k
i
(
ρ
)
=
H
r
1
r
,
and lim
ρ→0|A|2(ρ) exists and is finite in this case as well.
In the case n ≥ r and d
r
< 0 we have ρ
− > 0,
λ
̇
H
r
,
d
r
(
ρ
−
)
=
0
, but
lim
ρ
→
ρ
−
λ
̈
H
r
,
d
r
(
ρ
)
=
+
∞
. Hence |A|2 blows up at ρ
− because
lim
ρ
→
ρ
−
k
n
(
ρ
)
=
+
∞
. Moreover, it is clear that by reflecting the hypersurface generated by the graph of
λ
H
r
,
d
r
across the slice
H
n
×
{
0
}
one gets cuspidal singularities along the intersection with
H
n
×
{
0
}
.
Finally, when n = r and 0 < d
n
< 1, by Proposition 2.7 we have that ρ
− = 0 and
λ
̇
H
n
,
d
n
(
0
)
=
d
n
1
n
1
−
d
n
2
n
1
2
>
0
.
So the hypersurface generated by the graph of
λ
H
n
,
d
n
has a conical singularity in ρ = 0.□
We now classify rotational H
r
-hypersurfaces for r even based on the above arguments. We recover results by Elbert–Sa Earp [21, Section 6] and de Lima–Manfio–dos Santos [22, Theorem 1 and 2]. We recall that a slice is any subspace
H
n
×
{
t
}
⊂
H
n
×
R
, and by its origin we mean its intersection with the t-axis.
Theorem 2.9
Assume r even, n > r, and d
r
< 0. By reflecting the rotational hypersurface given by the graph of
λ
H
r
,
d
r
across suitable slices, we get a non-compact embedded H
r
-hypersurface.
If 0 < H
r
≤ (n − r)/n, the hypersurface generated by the graph of
λ
H
r
,
d
r
together with its reflection across the slice
H
n
×
{
0
}
is a singular annulus. Its singular set is made of cuspidal points along a sphere of radius ρ
− centered at the origin of the slice
H
n
×
{
0
}
.
If H
r
> (n − r)/n, then the hypersurface generated by the graph of
λ
H
r
,
d
r
, together with its reflections across the slices
H
n
×
{
k
λ
H
r
,
d
r
(
ρ
+
)
}
,
k
∈
Z
, gives a singular onduloid. Its singular set is made of cuspidal points along spheres of radius ρ
− centered at the origin of the slices
H
n
×
{
2
k
λ
H
r
,
d
r
(
ρ
+
)
}
,
k
∈
Z
.
Theorem 2.10
Assume r even, n > r, and d
r
= 0. Then the rotational hypersurface given by the graph of
λ
H
r
,
0
is a complete embedded H
r
-hypersurface, possibly after reflection across a suitable slice.
If 0 < H
r
≤ (n − r)/n, the hypersurface generated by the graph of
λ
H
r
,
0
is an entire graph of class C
2 tangent to the slice
H
n
×
{
0
}
at the origin.
If H
r
> (n − r)/n, the hypersurface generated by the graph of
λ
H
r
,
0
, together with its reflection across the slice
H
n
×
{
λ
H
r
,
0
(
ρ
+
)
}
, is a class C
2 sphere.
Theorem 2.11
Assume r even, n > r, and d
r
> 0. By reflecting the rotational hypersurface given by the graph of
λ
H
r
,
d
r
across suitable slices, we get a complete non-compact embedded H
r
-hypersurface.
If 0 < H
r
≤ (n − r)/n, the hypersurface generated by the graph of
λ
H
r
,
d
r
, together with its reflection across the slice
H
n
×
{
0
}
, is a class C
2 annulus. When n = r + 1 and H
r
= 1/(r + 1), the same holds, provided that d
r
is smaller than (r − 1)!!π/2(r − 2)!!.
If H
r
> (n − r)/n, the hypersurface generated by the graph of
λ
H
r
,
d
r
together with its reflections across the slices
H
n
×
{
k
λ
H
r
,
d
r
(
ρ
+
)
}
,
k
∈
Z
, is a class C
2 onduloid.
Theorem 2.12
Assume n = r even and H
n
> 0. Then the H
n
-hypersurface generated by the graph of
λ
H
n
,
d
n
, together with its reflection across the slice
H
n
×
{
λ
H
n
,
d
n
(
ρ
+
)
}
, is a class C
2 sphere if d
n
= 0, and a peaked sphere if 0 < d
n
< 1. If d
n
< 0 then the H
n
-hypersurface generated by the graph of
λ
H
n
,
d
n
, together with its reflections across the slices
H
n
×
{
k
λ
H
n
,
d
n
(
ρ
+
)
}
,
k
∈
Z
, gives a singular onduloid. Its singular set is made of cuspidal points along spheres of radius ρ
− centered at the origin of the slices
H
n
×
{
2
k
λ
H
n
,
d
n
(
ρ
+
)
}
,
k
∈
Z
.
2.2 Case r odd
We organize this subsection in a similar fashion as the previous one. Some of the arguments will be analogous to the corresponding ones for r even, so we leave out the relative details. Note that this subsection includes and extends the mean curvature case treated in [23] and [27]. A crucial difference from the case r even is that for d
r
< 0 the derivative
λ
̇
H
r
,
d
r
is negative on some subset of the domain of
λ
H
r
,
d
r
, and for r > 1 the function
λ
H
r
,
d
r
is not C
2-regular at its minimum point. Further, more types of curves arise when n > r and d
r
< 0, and when n = r. In our classification, we will recover results by Bérard–Sa Earp [23, Section 2], Elbert–Sa Earp [21, Section 6], and de Lima–Manfio–dos Santos [22, Theorem 1 and 2].
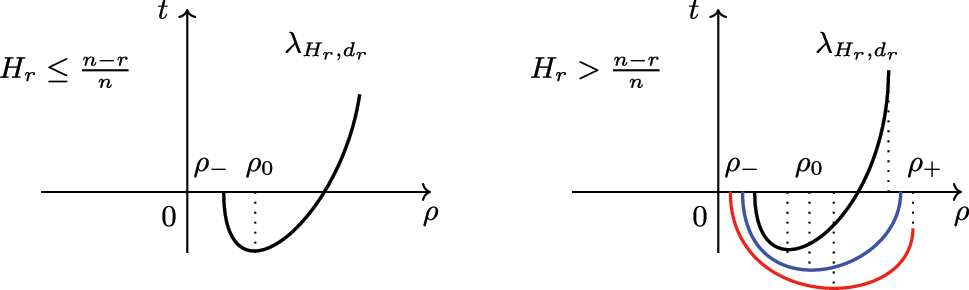
Proposition 2.13
Assume r odd, n > r, and d
r
< 0.
If 0 < H
r
≤ (n − r)/n, then
λ
H
r
,
d
r
is defined on [ρ
−, + ∞), where ρ
− > 0 is the only solution of sinh
n−r
(ρ) + (nH
r
I
n,r
(ρ) + d
r
) = 0.
If H
r
> (n − r)/n, then
λ
H
r
,
d
r
is defined on [ρ
−, ρ
+], where ρ
− is as above, and ρ
+ > 0 is the only solution of sinh
n−r
(ρ) − (nH
r
I
n,r
(ρ) + d
r
) = 0.
Set ρ
0 to be the only zero of nH
r
I
n,r
+ d
r
. We have
λ
H
r
,
d
r
(
ρ
−
)
=
0
,
lim
ρ
→
ρ
−
λ
̇
H
r
,
d
r
(
ρ
)
=
−
∞
,
λ
̇
H
r
,
d
r
(
ρ
)
<
0
when ρ
− < ρ < ρ
0, and
λ
̇
H
r
,
d
r
(
ρ
)
>
0
when ρ > ρ
0. In case (1),
lim
ρ
→
+
∞
λ
H
r
,
d
r
(
ρ
)
=
+
∞
. In case (2),
lim
ρ
→
ρ
+
λ
̇
H
r
,
d
r
(
ρ
)
=
+
∞
. Further,
λ
H
r
,
d
r
is convex in the interior of its domain. In particular, it is of class C
2 for r = 1, and
lim
ρ
→
ρ
0
λ
̈
H
r
,
d
r
(
ρ
)
=
+
∞
for r > 1 (Figure 4).
Proof
Our constraint for
λ
H
r
,
d
r
to be well-defined is now
(8)
−
sinh
n
−
r
(
ρ
)
<
n
H
r
I
n
,
r
(
ρ
)
+
d
r
<
sinh
n
−
r
(
ρ
)
,
ρ
>
0
.
We know that nH
r
I
n,r
+ d
r
is an increasing function with d
r
< 0 and I
n,r
(0) = 0, so that nH
r
I
n,r
(0) + d
r
< 0. The first inequality in (8) is then always satisfied for ρ > ρ
− > 0, where ρ
− is the unique solution of nH
r
I
n,r
(ρ) + d
r
+ sinh
n−r
(ρ) = 0. It is clear that ρ
− → 0 if and only if d
r
→ 0. The study of the second inequality goes along the lines of the corresponding one for r even (Proposition 2.4). Note that
lim
ρ
→
ρ
−
λ
̇
H
r
,
d
r
(
ρ
)
=
−
∞
regardless of the value of H
r
. Also,
λ
H
r
,
d
r
is decreasing on (ρ
−, ρ
0), where ρ
0 is the only zero of nH
r
I
n,r
+ d
r
, then it increases beyond ρ
0. Convergence at ρ
− or ρ
+ and the statements involving the second derivative follow by (5) and similar arguments as in the proof of Proposition 2.4. We point out that for r = 1 the term
(
n
H
r
I
n
,
r
(
ρ
)
+
d
r
)
(
r
−
1
)
/
r
equals 1, so the second derivative of
λ
H
r
,
d
r
is well-defined over the interior of the whole domain. For r > 1 the same term vanishes at ρ
0, and this concludes the proof.□
Unlike the case when r is even, the sign of
λ
H
r
,
d
r
(
ρ
+
)
, for H
r
> (n − r)/n, r > 1 odd, is not always positive. We discuss this point here below. Moreover we show that
λ
H
1
,
d
1
(
ρ
+
)
only takes positive values.
Proposition 2.14
The following statements hold.
If H
1 > (n − 1)/n, then
λ
H
1
,
d
1
(
ρ
+
)
>
0
for all d
1 < 0.
Let 2r − 1 > n > r ≥ 3, and r odd. Then there exist values H
r
> (n − r)/n and d
r
< 0 such that
λ
H
r
,
d
r
(
ρ
+
)
is negative, positive, or zero.
Proof
In case (1), it is well known that the rotational hypersurface generated by the curve defined by
λ
H
1
,
d
1
is of class C
2. We show (1) by using Alexandrov reflection method with respect to vertical hyperplanes in
H
n
×
R
. Let H
1 > (n − 1)/n be fixed. Since the function defining
λ
H
1
,
0
is non-negative and does not vanish, and
λ
H
1
,
d
1
is continuous in d
1, then for d
1 < 0 close enough to 0 we have
λ
H
1
,
d
1
(
ρ
+
)
>
0
. Suppose there is a value of the parameter d
1 for which
λ
H
1
,
d
1
(
ρ
+
)
vanishes. Consider the rotational hypersurface S obtained after reflecting the graph of
λ
H
1
,
d
1
across the ρ-axis, and then rotating about the t-axis. Topologically S is a product S
1 × S
n−1, and is of class C
2. Since S is compact, we can take a vertical hyperplane
Π
⊂
H
n
×
R
corresponding to ρ > 0 large enough not intersecting S, and then move it towards S until Π ∩ S ≠ ∅. We keep moving Π in the same way and reflect the portion of S left behind Π across Π. Since
λ
H
1
,
d
1
(
ρ
−
)
=
0
, there will be a first intersection point between the reflected part of S and S itself. The Maximum Principle then implies that S has a symmetry with respect to a vertical hyperplane corresponding to some ρ ∈ (ρ
−, ρ
+). But this is a contradiction, as the hypersurface has rotational symmetry about t = 0. Continuity of
λ
H
1
,
d
1
with respect to the parameters implies that there cannot be values of d
1 such that
λ
H
1
,
d
1
(
ρ
+
)
is negative.
As for (2), observe that for H
r
> (n − r)/n we have
λ
H
r
,
0
(
ρ
+
)
>
0
, because the integrand function defining
λ
H
r
,
0
is non-negative and does not vanish identically. Continuity with respect to the parameter d
r
implies that
λ
H
r
,
d
r
(
ρ
+
)
>
0
for d
r
< 0 close enough to 0. We now show that
λ
H
r
,
d
r
(
ρ
+
)
<
0
for some H
r
> (n − r)/n and d
r
< 0. Let us introduce the function
g
(
ρ
)
≔
n
H
r
I
n
,
r
(
ρ
)
+
d
r
sinh
n
−
r
(
ρ
)
,
and note that we can rewrite
λ
H
r
,
d
r
(
ρ
+
)
as
λ
H
r
,
d
r
(
ρ
+
)
=
∫
ρ
−
ρ
+
g
(
ξ
)
1
r
1
−
g
(
ξ
)
2
r
d
ξ
.
We claim that, for any d
r
< 0 and 2r − n − 1 > 0, if H
r
is large enough then g is convex on (ρ
−, ρ
+). So let d
r
< 0 be fixed. By definition of ρ
± we have
H
r
=
|
d
r
|
±
sinh
n
−
r
(
ρ
±
)
n
I
n
,
r
(
ρ
±
)
.
Observe that ρ
± → 0 if and only if H
r
→ ∞ and
ρ
±
≈
|
d
r
|
1
n
H
r
−
1
n
as H
r
→ ∞. Therefore for any ρ ∈ (ρ
−, ρ
+) we estimate
(9)
ρ
≈
|
d
r
|
H
r
1
n
,
H
r
→
∞
.
Since −sinh
n−r
(ρ) < nH
r
I
n,r
(ρ) + d
r
< sinh
n−r
(ρ) holds on (ρ
−, ρ
+), (9) and explicit computations give that for any ρ ∈ (ρ
−, ρ
+) we have
g
″
(
ρ
)
=
n
H
r
sinh
(
ρ
)
cosh
(
ρ
)
r
−
2
r
−
1
cosh
2
(
ρ
)
−
(
n
−
r
)
+
n
H
r
I
n
,
r
(
ρ
)
+
d
r
sinh
n
−
r
+
2
(
ρ
)
(
(
n
−
r
)
sinh
2
(
ρ
)
+
n
−
r
+
1
)
>
n
H
r
sinh
(
ρ
)
cosh
(
ρ
)
r
−
2
r
−
1
cosh
2
(
ρ
)
−
(
n
−
r
)
−
(
n
−
r
)
sinh
2
(
ρ
)
+
n
−
r
+
1
sinh
2
(
ρ
)
≈
H
r
2
n
(
2
r
−
1
−
n
)
|
d
r
|
r
−
2
n
H
r
n
−
r
n
−
(
n
−
r
+
1
)
|
d
r
|
−
2
n
−
(
n
−
r
)
.
When H
r
→ ∞ the latter quantity diverges to +∞ if 2r − 1 − n > 0, hence g″ > 0 on (ρ
−, ρ
+). Fix H
r
large enough such that g is convex in (ρ
−, ρ
+). Since g(ρ
±) = ±1, then g(ρ) < s(ρ) for any ρ ∈ (ρ
−, ρ
+), where s is the segment-line connecting (ρ
−, − 1) with (ρ
+, 1). Moreover the function
x
↦
x
1
/
r
/
1
−
x
2
/
r
is increasing on (−1, 1). For such a choice of H
r
and d
r
we then have
λ
H
r
,
d
r
(
ρ
+
)
<
∫
ρ
−
ρ
+
s
(
ξ
)
1
r
1
−
s
(
ξ
)
2
r
d
ξ
=
ρ
+
−
ρ
−
2
∫
−
1
1
u
1
r
1
−
u
2
r
d
u
=
0
,
as the latter integrand function is odd.
Continuity of
λ
H
r
,
d
r
with respect to the parameters H
r
and d
r
implies the last assertion of (2) at once.□
The proof of the next statement is left out, because the results can be seen by adapting the proof of Proposition 2.4 when d
r
= 0.
Proposition 2.15
Assume r odd, n > r, and d
r
= 0.
If 0 < H
r
≤ (n − r)/n, then
λ
H
r
,
0
is defined on [0, + ∞).
If H
r
> (n − r)/n, then
λ
H
r
,
0
is defined on [0, ρ
+], where ρ
+ > 0 is the only solution of sinh
n−r
(ρ) − nH
r
I
n,r
(ρ) = 0.
Further,
λ
H
r
,
0
is increasing and convex in the interior of its domain. We have
λ
H
r
,
0
(
0
)
=
0
=
lim
ρ
→
0
λ
̇
H
r
,
0
(
ρ
)
. In case (1),
λ
H
r
,
0
is unbounded. In case (2),
lim
ρ
→
ρ
+
λ
̇
H
r
,
0
(
ρ
)
=
+
∞
. Finally,
lim
t
→
0
λ
̈
H
r
,
0
(
ρ
)
=
H
r
1
/
r
(Figure 5).
In order to prove the next result, one needs the analogue of formula (7) and Lemma 2.5 for r odd. We have I
2,1(x) = cosh(x) − 1 and for r ≥ 3 we compute
I
r
+
1
,
r
(
x
)
=
−
sinh
(
x
)
1
r
−
2
tanh
r
−
2
(
x
)
+
r
−
1
(
r
−
2
)
(
r
−
4
)
tanh
r
−
4
(
x
)
+
(
r
−
1
)
(
r
−
3
)
(
r
−
2
)
(
r
−
4
)
(
r
−
6
)
tanh
r
−
6
(
x
)
+
⋯
+
(
r
−
1
)
‼
2
(
r
−
2
)
‼
tanh
(
x
)
+
(
r
−
1
)
‼
(
r
−
2
)
‼
I
2,1
(
x
)
.
Lemma 2.16
Let r ≥ 3 be an odd natural number. Then
(
r
−
1
)
‼
(
r
−
2
)
‼
=
1
+
1
r
−
2
+
r
−
1
(
r
−
2
)
(
r
−
4
)
+
(
r
−
1
)
(
r
−
3
)
(
r
−
2
)
(
r
−
4
)
(
r
−
6
)
+
⋯
+
(
r
−
1
)
(
r
−
3
)
…
4
(
r
−
2
)
(
r
−
4
)
…
3
,
where, for all r, the sum on the right-hand side must be truncated in such a way that all summands are positive.
The next two results can be proved following the proof of Propositions 1.6 and 1.7.
Proposition 2.17
Assume r odd, n > r, and d
r
> 0.
If 0 < H
r
< (n − r)/n, then
λ
H
r
,
d
r
is defined on [ρ
−, + ∞), where ρ
− > 0 is the only solution of sinh
n−r
(ρ) − (nH
r
I
n,r
(ρ) + d
r
) = 0.
If H
r
= (n − r)/n, then when n = r + 1 we need d
1 < 1 or d
r
< (r − 1)!!/(r − 2)!! for r > 1, in order for
λ
H
r
,
d
r
to be well-defined, whereas for n > r + 1 we have no constraint. Under such conditions, the results in the previous point hold.
If H
r
> (n − r)/n, set τ > 0 such that tanh
r
(τ) = (n − r)/nH
r
. Then d
r
< sinh
n−r
(τ) − nH
r
I
n,r
(τ), for
λ
H
r
,
d
r
to be defined. So
λ
H
r
,
d
r
is a function on [ρ
−, ρ
+] ⊂ (0, + ∞), where sinh
n−r
(ρ
±) − (nH
r
I
n,r
(ρ
±) + d
r
) = 0.
Further,
λ
H
r
,
d
r
is increasing in the interior of its domain. In cases (1)–(2),
λ
H
r
,
d
r
(
ρ
−
)
=
0
,
lim
ρ
→
ρ
−
λ
̇
H
r
,
d
r
(
ρ
)
=
+
∞
,
λ
H
r
,
d
r
is unbounded, and is concave in the interior of its domain. In case (3),
λ
H
r
,
d
r
(
ρ
−
)
=
0
,
lim
ρ
→
ρ
±
λ
̇
H
r
,
d
r
(
ρ
)
=
+
∞
,
λ
H
r
,
d
r
has a unique inflection point in (ρ
−, ρ
+), and goes from being concave to convex (Figure 6).
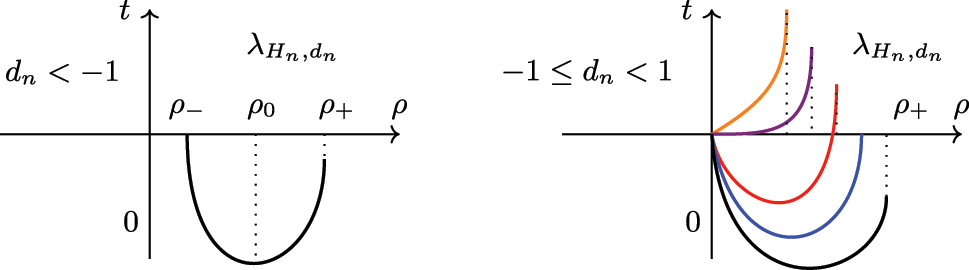
Proposition 2.18
Assume n = r odd. Then
λ
H
n
,
d
n
is well-defined for d
n
< 1. Set I
n
≔ I
n,n
.
If d
n
< − 1, then
λ
H
n
,
d
n
is defined on [ρ
−, ρ
+], where ρ
− is the only solution of nH
n
I
n
(ρ) + d
n
= −1, and ρ
+ is the only solution of nH
n
I
n
(ρ) + d
n
= 1.
If −1 ≤ d
n
< 1, then
λ
H
n
,
d
n
is defined on [0, ρ
+], where ρ
+ is defined as above.
Further,
λ
H
n
,
d
n
is convex in the interior of its domain. Set ρ
0 to be the only solution of nH
n
I
n
(ρ) + d
n
= 0. In case (1), we have
λ
H
n
,
d
n
(
ρ
−
)
=
0
,
λ
̇
H
n
,
d
n
(
ρ
)
<
0
for ρ
− < ρ < ρ
0,
λ
̇
H
n
,
d
n
(
ρ
)
>
0
for ρ > ρ
0,
λ
H
n
,
d
n
(
ρ
+
)
<
0
, and
lim
ρ
→
ρ
+
λ
̇
H
n
,
d
n
(
ρ
)
=
+
∞
. In case (2), one finds
λ
̇
H
n
,
d
n
(
0
)
=
d
n
1
/
n
/
1
−
d
n
2
/
n
1
/
2
, and
lim
d
n
→
−
1
λ
̇
H
n
,
d
n
(
0
)
=
−
∞
. For d
n
< 0 the function
λ
H
n
,
d
n
first decreases then increases, and the sign of
λ
H
n
,
d
n
depends on the value of d
n
, whereas for d
n
≥ 0 the function
λ
H
n
,
d
n
is increasing on the whole domain. Moreover,
lim
ρ
→
0
λ
̈
H
n
,
0
(
ρ
)
=
H
n
1
/
n
, and
lim
ρ
→
ρ
0
λ
̈
H
n
,
d
n
(
ρ
)
=
+
∞
(Figure 7).
Proof
The only part of the proof differing from the proof of Proposition 2.7 is about the sign of
λ
H
n
,
d
n
(
ρ
+
)
. We look first at the case d
n
< − 1. Since nH
n
I
n
+ d
n
is convex, nH
n
I
n
(ρ) + d
n
< s(ρ), where s is the line passing through the points (ρ
−, − 1) and (ρ
+, 1). Now nH
n
I
n
(ρ) + d
n
< s(ρ) for ρ ∈ (ρ
−, ρ
+), so we also have
(
n
H
n
I
n
(
ρ
)
+
d
n
)
1
n
1
−
(
n
H
n
I
n
(
ρ
)
+
d
n
)
2
n
<
s
(
ρ
)
1
n
1
−
s
(
ρ
)
2
n
,
as the function
x
↦
x
1
/
n
/
1
−
x
2
/
n
is increasing. But the integral of the latter quantity over (ρ
−, ρ
+) is computed to be zero, as the integrand function is odd:
∫
ρ
−
ρ
+
s
(
ξ
)
1
n
1
−
s
(
ξ
)
2
n
d
ξ
=
ρ
+
−
ρ
−
2
∫
−
1
1
u
1
n
1
−
u
2
n
d
u
=
0
.
This shows
λ
H
n
,
d
n
(
ρ
+
)
<
0
. The same holds when d
n
= −1, the only difference being that ρ
− = 0. Since
λ
H
n
,
d
n
(
ρ
+
)
depends continuously on d
n
, and for d
n
≥ 0 we have
λ
H
n
,
d
n
(
ρ
+
)
>
0
, there must be a d
n
∈ (−1, 0) such that
λ
H
n
,
d
n
(
ρ
+
)
=
0
.□
As in the case of r even (cf. Proposition 2.8), before proceeding with the classification result, we study the regularity of the H
r
-hypersurface generated by a rotation of the graph of
λ
H
r
,
d
r
.
Proposition 2.19
Let n ≥ r, r odd. Then the hypersurface generated by the graph of
λ
H
r
,
d
r
is of class C
2 at ρ = ρ
+, when the latter exists, and it is of class C
2 at ρ = ρ
− if and only if n > r, or n = r and d
n
∈ (−∞, − 1) ∪ {0}. When n = r and d
r
∈ [−1, 0) ∪ (0, 1), there is a conical singularity at ρ = 0. Moreover, if r ≥ 3 and d
r
≠ 0, the hypersurface is C
2-singular at any critical point of the function
λ
H
r
,
d
r
.
Proof
The first part of the proof is an application of the same argument as in Proposition 2.8. If r = 1 it is well known that the corresponding hypersurface is smooth. Now let r ≥ 3 and let ρ
0 be a critical point of
λ
H
r
,
d
r
. By (4) we have that nH
r
I
n,r
(ρ
0) + d
r
= 0. By (5) it follows that
lim
ρ
→
ρ
0
λ
̈
H
r
,
d
r
(
ρ
)
=
+
∞
. Using (1) we can see that
lim
ρ
→
ρ
0
k
n
(
ρ
)
=
+
∞
, hence |A|2 blows up near ρ
0.□
Remark 2.20
The same kind of singularities appears in the construction of rotationally invariant higher order translators, i.e. hypersurfaces with H
r
= g(ν, ∂/∂t), where r > 1 and ν is the unit normal, see [28].
We now proceed with the classification results. We recover results by Bérard–Sa Earp [23], Elbert–Sa Earp [21, Section 6] and de Lima–Manfio–dos Santos [22, Theorem 1 and 2]. Recall that a slice is any subspace
H
n
×
{
t
}
⊂
H
n
×
R
, and its origin was defined as its intersection with the t-axis.
Theorem 2.21
Assume r odd, n > r, and d
r
< 0. By reflecting the rotational hypersurface given by the graph of
λ
H
r
,
d
r
across suitable slices, we get an immersed H
r
-hypersurface.
If 0 < H
r
≤ (n − r)/n, the hypersurface generated by the graph of
λ
H
r
,
d
r
, together with its reflection across the slice
H
n
×
{
0
}
, is an annulus with self-intersections along a sphere centered at the origin of the slice
H
n
×
{
0
}
. The hypersurface is of class C
2 for r = 1, and of class C
1 for r ≥ 3. In the latter case, the singular set consists of two spheres of radius ρ
0 contained in the slices
H
n
×
{
±
λ
H
r
,
d
r
(
ρ
0
)
}
and centered at their origin.
If H
r
> (n − r)/n, then we distinguish two subcases. If r = 1, the hypersurface generated by the graph of
λ
H
r
,
d
r
, together with its reflection across the slice
H
n
×
{
0
}
and vertical translations of integral multiples of
2
λ
H
r
,
d
r
(
ρ
+
)
, is a C
2 nodoid with self-intersections along infinitely many spheres centered at the origin of distinct slices. If r ≥ 3, we have two possibilities. First, one may get nodoids as in the r = 1 case, except that they are not C
2-regular (singularities appear along infinitely many spheres of radius ρ
0 in distinct slices). Second, one may get compact hypersurfaces with the topology of S
1 × S
n−1 with C
2 singularities along two spheres of radius ρ
0 contained in the slices
H
n
×
{
±
λ
H
r
,
d
r
(
ρ
0
)
}
and centered at their origin.
Theorem 2.22
Assume r odd, n > r, and d
r
= 0. Then the rotational hypersurface given by the graph of
λ
H
r
,
0
is a complete embedded H
r
-hypersurface, possibly after reflection across a suitable slice.
If 0 < H
r
≤ (n − r)/n, the hypersurface generated by the graph of
λ
H
r
,
0
is an entire graph of class C
2 tangent to the slice
H
n
×
{
0
}
at the origin.
If H
r
> (n − r)/n, the hypersurface generated by the graph of
λ
H
r
,
0
, together with its reflection across the slice
H
n
×
{
λ
H
r
,
0
(
ρ
+
)
}
, is a class C
2 sphere.
Theorem 2.23
Assume r odd, n > r, and d
r
> 0. By reflecting the rotational hypersurface given by the graph of
λ
H
r
,
d
r
across suitable slices, we get a complete non-compact embedded H
r
-hypersurface.
If 0 < H
r
≤ (n − r)/n, the hypersurface generated by the graph of
λ
H
r
,
d
r
, together with its reflection across the slice
H
n
×
{
0
}
, is a class C
2 annulus. When n = r + 1 and H
r
= 1/(r + 1) the same holds, provided that d
r
is smaller than (r − 1)!!/(r − 2)!! for r > 1, or smaller than 1 for r = 1.
If H
r
> (n − r)/n, the hypersurface generated by the graph of
λ
H
r
,
d
r
together with its reflections across the slices
H
n
×
{
k
λ
H
r
,
d
r
(
ρ
+
)
}
,
k
∈
Z
, is a class C
2 onduloid.
Theorem 2.24
Assume n = r odd and H
n
> 0. Then the hypersurface generated by the graph of
λ
H
n
,
d
n
, together with its reflection across the slice
H
n
×
{
λ
H
n
,
d
n
(
ρ
+
)
}
is a class C
2 sphere if d
n
= 0, and a peaked sphere if 0 < d
n
< 1.
When −1 ≤ d
n
< 0, the hypersurface generated by the graph of
λ
H
n
,
d
n
, together with its reflections across suitable slices, has self-intersections and we have three possibilities: it may be a generalized horn torus, a portion of generalized spindle torus, or a nodoid. In all cases, the hypersurface has C
2 singularities, cf. Table 3.
When d
n
< − 1, the hypersurface generated by the graph of
λ
H
n
,
d
n
, together with its reflection across the slice
H
n
×
{
0
}
and vertical translations of integral multiples of
2
λ
H
n
,
d
n
(
ρ
+
)
, is an immersed nodoid with C
2 singularities along infinitely many spheres of radius ρ
0 in distinct slices and centered at their origin.
Tables 1
–3 summarize the above results. We describe the shape of the hypersurfaces and specify their homeomorphism type when the topology is easily described.
Table 1:
Rotation H
r
-hypersurfaces in
H
n
×
R
with H
r
> (n − r)/n.
| Parameters |
Shape/topology |
Singularities |
Figure |
|
d
r
> 0 |
Onduloid/
S
n
−
1
×
R
|
✗ |
2, 6 |
|
d
r
= 0 |
Sphere/S
n
|
✗ |
1, 5 |
|
d
r
< 0, r even |
Singular onduloid/
S
n
−
1
×
R
|
Infinitely many copies of S
n−1 given by cusps in horizontal slices |
1 |
|
d
r
< 0, r odd |
Nodoid |
|A|2 → ∞ on infinitely many copies of S
n−1 in horizontal slices if r ≥ 3, else smooth |
4 |
|
S
n−1 × S
1
|
|A|2 → ∞ on two copies of S
n−1 in horizontal slices |
4 |
Table 2:
Rotation H
r
-hypersurfaces in
H
n
×
R
with 0 < H
r
≤ (n − r)/n.
| Parameters |
Shape/topology |
Singularities |
Figure |
|
d
r
> 0 |
Unbounded annulus/
S
n
−
1
×
R
|
✗ |
2, 6 |
|
d
r
= 0 |
Entire graph/
R
n
|
✗ |
1, 5 |
|
d
r
< 0, r even |
Singular annulus/
S
n
−
1
×
R
|
A copy of S
n−1 given by cusps in the slice t = 0 |
1 |
|
d
r
< 0, r odd |
Singular annulus with self-intersections along a copy of S
n−1 in
H
n
×
{
0
}
|
|A|2 → ∞ on two copies of S
n−1 in horizontal slices if r ≥ 3, else smooth |
4 |
Table 3:
Rotation H
n
-hypersurfaces in
H
n
×
R
with H
n
> 0.
| Parameters |
Shape/topology |
Singularities |
Figure |
|
d
n
< − 1, n odd |
Nodoid |
|A|2 → ∞ at infinitely many copies of S
n−1 in horizontal slices |
7 |
|
Nodoid |
|A|2 → ∞ at infinitely many points on the t-axis and copies of S
n−1 in horizontal slices |
7 |
| −1 ≤ d
n
< 0 n odd |
Generalized horn torus |
|A|2 → ∞ at two copies of S
n−1 in horizontal slices and at one point on the t-axis |
7 |
|
Portion of generalized spindle torus |
|A|2 → ∞ at two copies of S
n−1 in horizontal slices and at two points on the t-axis |
7 |
|
d
n
< 0, n even |
Singular onduloid/
S
n
−
1
×
R
|
Infinitely many copies of S
n−1 given by cusps in horizontal slices |
3 |
|
d
n
= 0 |
Sphere/S
n
|
✗ |
3, 7 |
| 0 < d
n
< 1 |
Peaked sphere/S
n
|
|A|2 → ∞ at two points on the t-axis |
3, 7 |
Remark 2.25
Let us comment on the last case of Table 1, i.e. d
r
< 0 and r odd. Both types of hypersurfaces noted there occur depending on the value of H
r
and d
r
. Also, S
n−1 × S
1 occurs only if r ≥ 3. As
λ
H
r
,
d
r
(
ρ
+
)
≠
0
gets closer to the ρ-axis, the corresponding nodoids get more self-intersections, and the topology of the hypersurface becomes non-trivial.
Remark 2.26
When −1 ≤ d
n
< 0 and n is odd, all three cases in Table 3 occur depending on the value of the parameter d
n
.
3 Translation H
r
-hypersurfaces
In the proof of Theorem 6.1, besides rotation hypersurfaces, we will need further H
r
-hypersurfaces as barriers. The suitable ones are invariant under hyperbolic translation in
H
n
×
R
with r-th mean curvature H
r
> (n − r)/n. Hyperbolic translations in
H
n
×
R
are hyperbolic translations in a slice
H
n
×
{
t
}
extended to be constant on the vertical component, and will be described precisely later. When 0 < H
r
< (n − r)/n, smooth complete hypersurfaces invariant under hyperbolic translation are treated in [22]. The case r = 1 has already been studied in [23], and an explicit description for n = 2 has been given by Manzano [29]. Therefore, we restrict to the case r > 1.
As in Section 2, given n, r, and H
r
> 0, one finds a one-parameter family of functions describing the profile of such translation hypersurfaces. Since we do not aim to give a complete classification of translation hypersurfaces, we will choose the parameter to be zero (see (11) below), and we will only describe a portion of the hypersurface. This will be enough for our purposes.
Let us recall the construction of translation hypersurfaces in
H
n
×
R
by Bérard–Sa Earp [23]. For simplifying the notation, we denote the zero-section
H
n
×
{
0
}
by
H
n
. Take γ in
H
n
to be a geodesic passing through 0. We define V to be the vertical plane
{
(
γ
(
ρ
)
,
t
)
:
t
,
ρ
∈
R
}
. We now take π to be a totally geodesic hyperplane in
H
n
orthogonal to γ at the origin. We consider hyperbolic translations along a geodesic δ passing through 0 in π, repeated slice-wise to get isometries of
H
n
×
R
. Now take a curve defined by c(ρ) ≔ (tanh(ρ/2), μ(ρ)) in V, where μ is to be determined. For any ρ > 0, consider the section
H
n
×
{
μ
(
ρ
)
}
, and move the point c(ρ) via the above hyperbolic translations. On each slice, this gives a hypersurface M
ρ
in
H
n
×
{
μ
(
ρ
)
}
through c(ρ). Hence the curve defined by c generates a translation hypersurface M = ∪
ρ
M
ρ
in
H
n
×
R
.
The principal curvatures of the hypersurface M, with respect to the unit normal pointing upwards are
k
1
=
⋯
=
k
n
−
1
=
μ
̇
(
1
+
μ
̇
2
)
1
2
tanh
(
ρ
)
,
k
n
=
μ
̈
(
1
+
μ
̇
2
)
3
2
.
Then
n
H
r
=
(
n
−
r
)
tanh
r
(
ρ
)
μ
̇
r
(
1
+
μ
̇
2
)
r
/
2
+
tanh
r
−
1
(
ρ
)
r
μ
̇
r
−
1
μ
̈
(
1
+
μ
̇
2
)
r
+
2
2
.
This is equivalent to the identity
(10)
n
H
r
cosh
n
−
1
(
ρ
)
sinh
r
−
1
(
ρ
)
=
d
d
ρ
cosh
n
−
r
(
ρ
)
μ
̇
r
(
1
+
μ
̇
2
)
r
2
,
r
=
1
,
…
,
n
.
Note that now the integrals
∫
0
ρ
cosh
n
−
1
(
τ
)
sinh
r
−
1
(
τ
)
d
τ
are not well-defined for r > 1, because
∫
0
ρ
cosh
n
−
1
(
τ
)
sinh
r
−
1
(
τ
)
d
τ
≥
∫
0
ρ
cosh
r
−
1
(
τ
)
sinh
r
−
1
(
τ
)
d
τ
≥
∫
0
ρ
c
o
t
g
h
(
τ
)
d
τ
=
∞
.
We then choose ϵ > 0 and define
J
n
,
r
,
ϵ
(
ρ
)
≔
∫
ϵ
ρ
cosh
n
−
1
(
τ
)
sinh
r
−
1
(
τ
)
d
τ
,
and
J
n
,
1
(
ρ
)
≔
∫
0
ρ
cosh
n
−
1
(
τ
)
d
τ
,
ρ
>
0
.
Then one can integrate (10) twice and set the constant of integration to be zero, so as to obtain
(11)
μ
H
r
,
ϵ
(
ρ
)
=
∫
ϵ
ρ
(
n
H
r
J
n
,
r
,
ϵ
(
ξ
)
)
1
r
cosh
2
(
n
−
r
)
r
(
ξ
)
−
(
n
H
r
J
n
,
r
,
ϵ
(
ξ
)
)
2
r
d
ξ
,
ρ
≥
ϵ
.
Again, μ depends on H
r
, and ϵ, so we write
μ
H
r
,
ϵ
to be precise.
Remark 3.1
Note that we have defined
μ
H
r
,
ϵ
in (11) for ρ ≥ϵ. This is because we are only interested in the portion of translation hypersurface described by the graph of
μ
H
r
,
ϵ
for ρ ≥ϵ. The tangent line to the curve described by
μ
H
r
,
ϵ
at ρ = ϵ is horizontal for all r, and
μ
H
r
,
ϵ
is increasing for ρ > ϵ. The second derivative of
μ
H
r
,
ϵ
(
t
)
is computed as
(12)
μ
̈
H
r
,
ϵ
(
ρ
)
=
sinh
(
ρ
)
cosh
2
(
n
−
r
)
r
−
1
(
ρ
)
n
H
r
cosh
n
(
ρ
)
sinh
r
(
ρ
)
−
(
n
−
r
)
(
n
H
r
J
n
,
r
,
ϵ
(
ρ
)
)
r
(
n
H
r
J
n
,
r
,
ϵ
(
ρ
)
)
r
−
1
r
cosh
2
(
n
−
r
)
r
(
ρ
)
−
(
n
H
r
J
n
,
r
,
ϵ
(
ρ
)
)
2
r
3
2
.
This expression will be used when studying the convexity of
μ
H
r
,
ϵ
and its regularity up to second order.
Remark 3.2
Let us discuss a few details on J
n,r,ϵ
for r > 1 and ρ > ϵ. It is clear that J
n,r,ϵ
(ϵ) = 0 and lim
ρ→+∞
J
n,r,ϵ
(ρ) = +∞. Further,
J
n
,
r
,
ϵ
′
(
ρ
)
>
0
for ρ ≥ϵ. Hence J
n,r,ϵ
is a bijection between (ϵ, ∞) and (0, + ∞).
For n > r, we have the asymptotic behavior (n − r)J
n,r,ϵ
(ρ) ≈ cosh
n−r
(ρ) for ρ → +∞, and for n = r we have J
n,n,ϵ
(ρ) ≈ ρ for ρ → +∞.
We fix r > 1 H
r
> (n − r)/n, and ϵ > 0, and study the function
μ
H
r
,
ϵ
(
ρ
)
≔
∫
ϵ
ρ
(
n
H
r
J
n
,
r
,
ϵ
(
ξ
)
)
1
r
cosh
2
(
n
−
r
)
r
(
ξ
)
−
(
n
H
r
J
n
,
r
,
ϵ
(
ξ
)
)
2
r
d
ξ
.
Proposition 3.3
Let r > 1, H
r
> (n − r)/n, and fix ϵ > 0. Then
μ
H
r
,
ϵ
is defined on
ϵ
,
ρ
+
ϵ
, where
ρ
+
ϵ
is the only solution of cosh
n−r
(ρ) − nH
r
J
n,r,ϵ
(ρ) = 0. We have
μ
H
r
,
ϵ
(
ϵ
)
=
0
=
μ
̇
H
r
,
ϵ
(
ϵ
)
,
μ
̇
H
r
,
ϵ
(
ρ
)
>
0
for
ρ
∈
ϵ
,
ρ
+
ϵ
,
lim
ρ
→
ρ
+
ϵ
μ
̇
H
r
,
ϵ
(
ρ
)
=
+
∞
, and
μ
H
r
,
ϵ
is convex in the interior of its domain. Further,
lim
ρ
→
ϵ
μ
̈
H
r
,
ϵ
(
ρ
)
=
+
∞
(Figure 8).
Proof
Putting together all constraints gives
0
≤
n
H
r
J
n
,
r
,
ϵ
(
ρ
)
<
cosh
n
−
r
(
ρ
)
.
Notice that
ρ
+
ϵ
is finite if and only if
f
ϵ
(
ρ
)
≔
cosh
n
−
r
(
ρ
)
−
n
H
r
J
n
,
r
,
ϵ
(
ρ
)
admits a zero. One has f
ϵ
(ϵ) > 0, whereas the derivative of f
ϵ
is
f
ϵ
′
(
ρ
)
=
cosh
n
−
1
(
ρ
)
sinh
r
−
1
(
ρ
)
(
(
n
−
r
)
tanh
r
(
ρ
)
−
n
H
r
)
,
and is negative since H
r
> (n − r)/n. Moreover,
f
ϵ
′
tends to −∞, hence a zero
ρ
+
ϵ
exists and is unique. For n = r, f
ϵ
reduces to 1 − nH
n
J
n,ϵ
, which has a zero
ρ
+
ϵ
>
ϵ
regardless of the value of H
n
> 0. The remaining details on the behavior of
μ
H
n
,
ϵ
follow as in previous section.□
Remark 3.4
The technique used for Proposition 2.8 can be combined with (12) and yields C
2-regularity of the translation H
r
-hypersurface at points corresponding to
ρ
=
ρ
+
ϵ
. At points corresponding to ρ = ϵ when r > 1 we only have regularity C
1.
By using the translation defined at the beginning of this section on the curves defined in Proposition 3.3, one gets translation H
r
-hypersurfaces in
H
n
×
R
, which we describe in the following theorem. Recall that π is the totally geodesic hyperplane in
H
n
orthogonal to the plane containing the support of the curve given by the function
μ
H
r
,
ϵ
at the origin.
Theorem 3.5
Let r > 1, H
r
> (n − r)/n, and ϵ > 0. Reflect the graph of
μ
H
r
,
ϵ
on
ϵ
,
ρ
+
ϵ
with respect to the horizontal slice
H
n
×
μ
H
r
,
ϵ
ρ
+
ϵ
. Translating the arc obtained along geodesics through the origin in π gives an H
r
-hypersurface with the topology of
R
n
−
1
×
[
0,1
]
and of class C
2 away from the boundary. The boundary components are planar equidistant hypersurfaces with distance ϵ from π, they lie in two different slices, and can be obtained from one another by a vertical translation.
4 Estimates
In this section we collect estimates that will be needed in the proof of Theorem 6.1. We define radii and heights related to pieces of the hypersurfaces classified in the previous sections, and study the interplay between them. First we need to compare spheres and horizontal cylinders.
Fix n ≥ r > 1 and H
r
> (n − r)/n. Denote by
S
r
the sphere in
H
n
×
R
with r-th mean curvature H
r
, namely the compact rotation hypersurface generated by the graph of
λ
H
r
,
0
in Theorems 2.10, 2.12, 2.22, 2.24. Let
R
S
r
≔
ρ
+
, where ρ
+ was defined as the length of the domain of
λ
H
r
,
0
.
For any ϵ > 0, let us denote by
C
r
,
ϵ
the H
r
-hypersurface described in Theorem 3.5, which is a portion of a horizontal cylinder. Set
R
C
r
,
ϵ
≔
ρ
+
ϵ
−
ϵ
where
ρ
+
ϵ
is the unique value such that
f
ϵ
(
ρ
+
)
=
cosh
n
−
r
(
ρ
+
)
−
n
H
r
J
n
,
r
,
ϵ
(
ρ
+
)
=
0
.
Note that
C
r
,
ϵ
has a horizontal hyperplane of symmetry P and
R
C
r
,
ϵ
is the distance between the projection of the boundary of
C
r
,
ϵ
on P and
C
r
,
ϵ
∩
P
.
The next estimate will be used in Claim II for the proof of Theorem 6.1.
Lemma 4.1
For all n, r, H
r
with n ≥ r > 1 and H
r
> (n − r)/n, there exists a positive ϵ = ϵ(n, r, H
r
) such that
R
C
r
,
ϵ
<
R
S
r
.
Remark 4.2
A version of this statement for r = 1 is given in Nelli–Pipoli [27, Lemma 3.3]. Lemma 3.1 may be viewed as an extension of the latter to r > 1.
Proof
We have already shown that for H
r
> (n − r)/n (or H
n
> 0) the function f
ϵ
is decreasing. Since
ρ
+
ϵ
>
ϵ
, we have
lim
ϵ
→
∞
ρ
+
ϵ
=
∞
.
Note that the function
ϵ
↦
ρ
+
ϵ
is continuous and increasing. To see this, let 0 < a < b and ρ > 0, so that
J
n
,
r
,
a
(
ρ
)
=
∫
a
b
cosh
n
−
1
(
x
)
sinh
r
−
1
(
x
)
d
x
+
∫
b
ρ
cosh
n
−
1
(
x
)
sinh
r
−
1
(
x
)
d
x
>
∫
b
ρ
cosh
n
−
1
(
x
)
sinh
r
−
1
(
x
)
d
x
=
J
n
,
r
,
b
(
ρ
)
.
It follows that
f
a
ρ
+
b
<
cosh
n
−
r
ρ
+
b
−
n
H
r
J
n
,
r
,
b
ρ
+
b
=
f
b
ρ
+
b
=
0
=
f
a
ρ
+
a
.
Since f
a
is decreasing,
ρ
+
b
>
ρ
+
a
holds.
We claim that
ρ
+
ϵ
<
ϵ
if ϵ is small enough. By definition of
ρ
+
ϵ
and the fact that f
ϵ
is decreasing, it is enough to prove that
f
ϵ
(
ϵ
)
<
0
for ϵ small enough. Since the function xcosh(x) − sinh(x) is positive for x > 0, we deduce that
cosh
n
−
1
(
x
)
sinh
r
−
1
(
x
)
=
cosh
n
−
r
(
x
)
cosh
r
−
1
(
x
)
sinh
r
−
1
(
x
)
>
1
x
r
−
1
,
whence
J
n
,
r
,
ϵ
(
ϵ
)
≥
−
1
2
log
(
ϵ
)
if
r
=
2
,
1
r
−
2
ϵ
2
−
r
−
ϵ
2
−
r
2
if
r
>
2
.
In both cases
lim
ϵ
→
0
J
n
,
r
,
ϵ
(
ϵ
)
=
+
∞
. It follows that
f
ϵ
(
ϵ
)
<
0
for ϵ sufficiently small, hence the claim is proved. We deduce that
ϵ
<
ρ
+
ϵ
<
ϵ
for ϵ small, so
lim
ϵ
→
0
ρ
+
ϵ
=
0
.
Given n ≥ r > 1 and H
r
> (n − r)/n, the value of
R
S
r
is fixed. By the above statements, there is a value of ϵ > 0 such that
R
C
r
,
ϵ
<
ρ
+
ϵ
<
R
S
r
.□
The next type of hypersurfaces we consider are annuli. Let n > r, H
r
= (n − r)/n, and choose d
r
> 0. For these values of the parameters, the functions
λ
H
r
,
d
r
for r even and odd share the same behavior. Specifically, they have a zero ρ
−, which is the only solution of sinh
n−r
(ρ) − (nH
r
I
n,r
(ρ) + d
r
) = 0, and start with vertical tangent. After a vertical reflection across the slice
H
n
×
{
0
}
and rotation about a vertical axis, each curve produces an unbounded annulus (see Theorems 1.11, 1.23).
Let us highlight a property of d
r
that will simplify our calculations. Since nI
n,r
(ρ) ≈ ρ
n
for ρ close to 0, for ρ
− small we estimate
d
r
=
sinh
n
−
r
(
ρ
−
)
−
n
H
r
I
n
,
r
(
ρ
−
)
≈
ρ
−
n
−
r
−
H
r
ρ
−
n
=
ρ
−
n
−
r
1
−
H
r
ρ
−
r
.
This implies
(13)
lim
d
r
→
0
d
r
ρ
−
n
−
r
=
1
.
We need to consider the portion of the previous annulus between the slices
H
n
×
{
0
}
and
H
n
×
{
h
*
}
, where h* is defined as
(14)
h
*
≔
∫
ρ
−
2
ρ
−
(
(
n
−
r
)
I
n
,
r
(
ξ
)
+
d
r
)
1
r
sinh
n
−
r
r
(
ξ
)
d
ξ
.
Observe that by (13) we can interpret h* as an approximation of the value
λ
(
n
−
r
)
/
r
,
d
r
(
2
ρ
−
)
for ρ
− small. Moreover
h
*
<
λ
(
n
−
r
)
/
r
,
d
r
(
2
ρ
−
)
.
Let now n = r. For d
n
> 0 small enough, we consider portions of the peaked spheres found in Theorems 1.12 and 1.24, so that the cases n even and odd can be treated together. Here ρ
− is not defined a priori, so we choose
ρ
−
=
d
n
2
/
n
and define h* as follows (by abuse of notation, we use the notation h* as above)
(15)
h
*
≔
∫
ρ
−
2
ρ
−
d
n
1
n
=
d
n
3
n
.
Note that when ρ
− is small, then 2ρ
− < ρ
+ and h* is an approximation of
λ
H
n
,
d
n
(
2
ρ
−
)
−
λ
H
n
,
d
n
(
ρ
−
)
, which is the height of the portion of the peaked sphere between two slices intersecting it in codimension one spheres of radii ρ
− and 2ρ
−. Moreover
h
*
<
λ
H
n
,
d
n
(
2
ρ
−
)
−
λ
H
n
,
d
n
(
ρ
−
)
.
For any n ≥ r we define
ρ
H
r
*
implicitly as
(16)
h
*
=
:
∫
0
ρ
H
r
*
(
n
H
r
I
n
,
r
(
ξ
)
)
1
r
sinh
2
(
n
−
r
)
r
(
ξ
)
−
(
n
H
r
I
n
,
r
(
ξ
)
)
2
r
d
ξ
,
Notice that
ρ
H
r
*
is the radius of the intersection of the sphere
S
r
of constant curvature H
r
with a slice at vertical distance h* from the South Pole.
As above, we assume ρ
− is small, which is equivalent to requiring d
r
small (recall that d
r
→ 0 if and only if ρ
− → 0).
Lemma 4.3
Let n > r, d
r
> 0, H
r
= (n − r)/n, take h* as in (14), and
ρ
H
r
*
as in (16). Then
lim
d
r
→
0
ρ
H
r
*
=
0
,
lim
d
r
→
0
ρ
−
ρ
H
r
*
=
0
.
For n = r, d
n
> 0, and H
n
> 0, take h* as in (15) and
ρ
H
n
*
as in (16). Then
lim
d
n
→
0
ρ
H
n
*
=
0
,
lim
d
n
→
0
ρ
−
ρ
H
n
*
=
0
.
Proof
First assume r < n. For d
r
small the right-hand side of (16) is approximated as
∫
0
ρ
H
r
*
H
r
1
r
ξ
d
ξ
=
H
r
1
r
2
ρ
H
r
*
2
.
We then approximate h* in (14) as
(17)
h
*
≈
∫
ρ
−
2
ρ
−
n
−
r
n
ξ
r
+
d
r
ξ
n
−
r
1
r
d
ξ
≈
∫
ρ
−
2
ρ
−
d
r
1
r
ξ
r
−
n
r
d
ξ
.
Assume now n ≠ 2r. We integrate (17) to find
h
*
≈
r
2
r
−
n
2
2
r
−
n
r
−
1
ρ
−
On the other hand,
h
*
≈
H
r
1
r
2
ρ
H
r
*
2
. Since d
r
→ 0 is equivalent to ρ
− → 0, it is clear that
lim
d
r
→
0
ρ
H
r
*
=
0
and
lim
d
r
→
0
ρ
−
ρ
H
r
*
=
lim
d
r
→
0
ρ
−
=
0
.
If n = 2r we need to integrate (17) in a different manner, namely
∫
ρ
−
2
ρ
−
d
r
1
r
ξ
−
1
d
ξ
=
d
r
1
r
ln
2
≈
ρ
−
ln
2
.
Then again,
lim
d
r
→
0
ρ
−
/
ρ
H
r
*
=
0
.
When n = r the proof is analogous provided that
h
*
≔
d
n
3
n
, as in (15).□
5 Hyperbolic limaçon
The goal of this section is to improve the estimates on the size of the hyperbolic limaçon introduced in [27]. This hypersurface of
H
n
generalizes the well-known limaçon de Pascal in the Euclidean plane, and it will play an important role in the proof of Theorem 6.1. We start by recalling its definition.
Definition 5.1
Let A and C be two distinct points in
H
n
, and c > 0 be a constant. Let
C
be the geodesic sphere with radius c centered at C. For any
P
∈
C
define A
P
to be the reflection of A across the totally geodesic hyperplane in
H
n
tangent to
C
at P. The set
L
≔
A
P
∈
H
n
:
P
∈
C
is called hyperbolic limaçon, and A is called base point of
L
.
Since the hyperbolic space is two-points homogeneous, up to isometries of the ambient space
L
depends only on two parameters: a ≔ d(A, C), where d is the hyperbolic distance, and c > 0 as in Definition 4.1. The shape of
L
changes depending on whether a = c, a < c, or a > c. Here we are only interested in the latter case. We refer to Nelli–Pipoli [27, Section 2] for general properties of
L
.
The following result improves [27, Lemma 2.5] and will allow to remove the pinching assumption in [27, Theorem 4.1].
Lemma 5.2
Take
L
to be the hyperbolic limaçon with a > c and base point A. Let
C
be the geodesic sphere defining
L
, C be its center, and X be the point of
C
with minimal distance from A. Then
L
has two loops, one inside the other, and it has a self-intersection only at A. Moreover the following statements hold.
The smaller (resp. larger) loop of
L
is contained in (resp. contains) the disk centered at X and radius a − c.
The smaller loop of
L
bounds the disk centered at X and radius
(18)
ℓ
(
a
,
c
)
≔
cosh
−
1
cosh
(
a
−
c
)
−
sinh
c
2
sinh
a
sinh
2
(
a
−
c
)
,
All of
L
sits inside the disk centered at C and radius a + 2c.
Proof
Since a > c,
L
has two loops, one inside the other, and has a self-intersection only at A, cf. [27, Lemma 2.4]. The estimates (1) and (3) have been proved in [27, Lemma 2.5]. It remains to prove (2).
Since
L
is invariant with respect to rotations about the geodesic passing through A and C, we can assume n = 2. We start by giving an explicit parametrization of
L
in the hyperboloid model for the hyperbolic space canonically embedded in the Minkowski space
R
2,1
=
(
R
3
,
q
)
, where q is the standard scalar product of signature (2, 1). Without loss of generality, we can assume that A = (sinha, 0, cosha), and the center of
C
to be (0, 0, 1). Then we parametrize
C
by
α
(
θ
)
=
(
sinh
c
cos
θ
,
sinh
c
sin
θ
,
cosh
c
)
.
Let P = α(θ) for some θ. We want to find the unique geodesic γ
P
through P tangent to
C
explicitly: γ
P
is the geodesic passing through P and generated by the unit tangent vector to
C
at P, which is
T
(
θ
)
=
α
′
(
θ
)
q
(
α
′
(
θ
)
,
α
′
(
θ
)
)
=
(
−
sin
θ
,
cos
θ
,
0
)
.
Therefore
γ
P
=
H
2
∩
Π
P
, where Π
P
is the plane in
R
2,1
passing through O, P, and parallel to T. A unit normal to Π
P
with respect to q is the vector
ν
(
θ
)
=
(
cosh
c
cos
θ
,
cosh
c
sin
θ
,
sinh
c
)
.
Following Definition 4.1, we need to reflect A across γ
P
. Since the reflection in
H
2
across γ
P
is the restriction to
H
2
of the reflection in
R
2,1
across Π
P
, it follows that
L
can be parametrized as
L
(
θ
)
=
A
−
2
q
(
A
,
ν
(
θ
)
)
ν
(
θ
)
.
The point of
C
at minimal distance from A is X = (sinhc, 0, coshc). Since a > c, then X is in the compact region bounded by the smaller loop of the hyperbolic limaçon. The strategy now is to compute the distance between X and
L
, then the smaller loop of
L
will bound a disk centered at X and radius the above distance. It is well known that the hyperbolic distance in the upper hyperboloid is
d
(
A
,
B
)
=
cosh
−
1
(
−
q
(
A
,
B
)
)
,
A
,
B
∈
H
2
.
In order to find the critical points of the function θ ↦ d(X, L(θ)), it is enough to find the critical points of the function θ ↦ q(X, L(θ)). We have
q
(
X
,
L
(
θ
)
)
=
−
cosh
(
a
−
c
)
+
q
(
θ
)
sinh
2
c
(
1
−
cos
θ
)
,
where q(θ) ≔ q(A, ν(θ)) = cosh c sinh a cos θ − sinh c cosh a. Explicit computations give
d
d
θ
q
(
X
,
L
(
θ
)
)
=
sinh
2
c
sin
θ
(
2
sinh
a
cosh
c
cos
θ
−
sinh
(
a
+
c
)
)
.
Hence critical points are given by
(19)
sin
θ
=
0
,
and
cos
θ
=
sinh
(
a
+
c
)
2
sinh
a
cosh
c
.
The case θ = 0 yields a new proof of [27, Lemma 2.5, part 1]. The case θ = π produces a disk centered at X and radius a + 3c, which is worse than the disk in [27, Lemma 2.5, part 3]. The case of interest is now the last one. Let θ
0 be such that cos θ
0 satisfies the second identity in (19). Then
q
(
X
,
L
(
θ
0
)
)
=
−
cosh
(
a
−
c
)
+
sinh
c
2
sinh
a
sinh
2
(
a
−
c
)
.
We then have
d
(
X
,
L
)
=
ℓ
(
a
,
c
)
=
cosh
−
1
cosh
(
a
−
c
)
−
sinh
c
2
sinh
a
sinh
2
(
a
−
c
)
,
hence the smaller loop of
L
bounds a disk of center X and radius ℓ(a, c).□
We conclude this section with a list of properties of ℓ which will be useful for the estimates in the proof of Theorem 6.1.
Lemma 5.3
The following properties hold.
For any a > c ≥ 0, ℓ(a, 0) = a, ℓ(a, a) = 0, and ℓ(a, c) > 0. Moreover ℓ(a, c) < a − c.
The function (a, c) ↦ ℓ(a, c) with domain
{
(
a
,
c
)
∈
R
2
:
a
>
c
>
0
}
is increasing in the first variable and decreasing in the second one.
For any x > 0, then ℓ(4x, 2x) > x.
Proof
The properties in (1) follow directly by the definition of ℓ, cf. (18).
As for (2), we have
∂
∂
a
cosh
(
ℓ
(
a
,
c
)
)
=
sinh
(
a
−
c
)
2
sinh
2
a
2
sinh
2
a
−
sinh
2
c
−
cosh
(
a
−
c
)
sinh
a
sinh
c
>
sinh
(
a
−
c
)
2
sinh
a
sinh
a
−
cosh
(
a
−
c
)
sinh
c
=
sinh
2
(
a
−
c
)
cosh
c
2
sinh
a
>
0
,
where we have used the fact that a > c > 0. Likewise
∂
∂
c
cosh
(
ℓ
(
a
,
c
)
)
=
−
sinh
(
a
−
c
)
2
sinh
a
(
2
sinh
a
+
cosh
c
sinh
(
a
−
c
)
−
2
sinh
c
cosh
(
a
−
c
)
)
=
−
3
sinh
2
(
a
−
c
)
cosh
c
2
sinh
a
<
0
.
Since the functions sinh and cosh are increasing in [0, + ∞), the claim follows.
Let us now prove (3). By (18) we have
ℓ
(
4
x
,
2
x
)
=
cosh
−
1
cosh
(
2
x
)
−
sinh
2
(
2
x
)
4
cosh
(
2
x
)
=
cosh
−
1
3
(
2
cosh
2
x
−
1
)
2
+
1
4
(
2
cosh
2
x
−
1
)
.
It follows that ℓ(4x, 2x) > x if and only if
3
(
2
cosh
2
x
−
1
)
2
+
1
4
(
2
cosh
2
x
−
1
)
>
cosh
x
,
namely (cosh(x) − 1)(cosh2 x + (cosh x − 1)(3 cosh2 x + 3 cosh x + 1)) > 0. The latter holds true for all x > 0, and we are done.□
6 Ros–Rosenberg type theorem
The second goal of the present paper is to prove a topological result about compact connected H
r
-hypersurfaces embedded in
H
n
×
R
with planar boundary. This is a generalization of the classical result of Ros and Rosenberg [25] about the topology of constant mean curvature surfaces in the Euclidean three-dimensional space.
Theorem 6.1
Let M be a compact connected hypersurface embedded in
H
n
×
[
0
,
∞
)
⊂
H
n
×
R
with boundary a closed horoconvex (n − 1)-dimensional hypersurface Γ embedded in the horizontal slice
H
n
×
{
0
}
. Assume M has constant r-th mean curvature H
r
> (n − r)/n for some r = 1, …, n. Then there is a constant δ = δ(n, r, H
r
) > 0 small enough such that, if Γ is contained in a disk of radius δ, then M is topologically a disk.
We recall that a hypersurface Γ of the hyperbolic space is called horoconvex if all its principal curvatures are larger than one.
Remark 6.2
Let us make a few observations.
When r = 1, Theorem 6.1 improves [27, Theorem 4.1]. In fact, thanks to the new estimates given in Lemma 4.2 (2), we do not need to assume any pinching on Γ.
Elbert–Sa Earp [21, Theorem 7.7] proved that when n > r and 0 < H
r
≤ (n − r)/n, then a compact connected H
r
-hypersurface M embedded in
H
n
×
[
0
,
∞
)
with horoconvex boundary Γ in the slice
H
n
×
{
0
}
is necessarily a graph over the compact planar domain bounded by Γ. In particular M is a disk. Therefore, we focus on the cases n > r, with H
r
> (n − r)/n, and n = r, with H
n
> 0.
By using Alexandrov reflections with respect to vertical hyperplanes, we can show that M shares the same symmetries of its boundary. In particular, when Γ is a geodesic sphere, M is rotationally symmetric. It follows that M is a portion of one of the compact hypersurfaces classified in Section 2, and Theorem 6.1 is proved in this special case.
In view of the previous remark, we will assume throughout that Γ is not a geodesic sphere.
Remark 6.3
In the following we will do extensive use of the tangency principle for H
r
-hypersurfaces as it is stated in [24, Theorem 1.1]. In order to satisfy the assumptions there, it is enough that the hypersurface M in Theorem 6.1 has a strictly convex point. This is guaranteed by [21, Lemma 7.5].
Notations
Let us introduce some notations that will be useful in the proof of Theorem 6.1. For the reader’s convenience, there is a list of notations at the end of the article. We denote by Ω the compact domain of
H
n
×
{
0
}
bounded by Γ and by W the compact domain in
H
n
×
R
with boundary M ∪ Ω. Given n ≥ r ≥ 2, and H
r
> (n − r)/n, we fix an ϵ > 0 such that Lemma 3.1 is satisfied. Denote by
C
r
≔
C
r
,
ϵ
the corresponding translation H
r
-hypersurface of Theorem 3.5. When r = 1 we use the same notation, however recall that no choice of ϵ is involved. Let
h
C
r
denote the height of
C
r
(namely 2μ
H
(ρ
+) for r = 1 and
2
μ
H
r
,
ϵ
ρ
+
ϵ
for r > 1). Analogously let
h
S
r
be the height of
S
r
(i.e.
2
λ
H
r
,
0
(
ρ
+
)
, cf. Theorems 1.10, 1.12, 1.22, 1.24). We define h
M
to be the height of M with respect to the slice
H
n
×
{
0
}
. The exterior (resp. interior) radius of Γ is the smaller (resp. larger) radius ρ such that for any p ∈ Γ there is a geodesic sphere S with radius ρ tangent to Γ at p and Γ sits in (resp. encloses) the closed ball with boundary S. We write r
ext
for the exterior radius and r
int for the interior one. Clearly r
ext
≥ r
int, and equality occurs if and only if Γ is a geodesic sphere. Moreover, since Γ is horoconvex, r
int and r
ext
are determined by the maximum and the minimum of the principal curvatures of Γ. Finally we denote by D(R) any disk of radius R > 0 in a horizontal slice of
H
n
×
R
.
The strategy of the proof of Theorem 6.1 is similar to that of [27]: if the height of M is less than the height of
C
r
, then M is a graph over Ω, otherwise it is a union of hypersurfaces, each one a graph over a suitable domain. As in [25], at the end of the proof it will be clear that the union of such graphs has the topology of the disk. The hyperbolic limaçon described in Section 5 will be used in various estimates.
Lemma 6.4
Let M and Γ satisfy the assumptions of Theorem 6.1. There is a disk D(r
min) in
H
n
×
{
0
}
such that
M
∩
(
D
(
r
min
)
×
R
)
is a graph, and ℓ(r
ext
, r
ext − r
int) ≤ r
min < r
int. In particular, r
min depends only on the principal curvatures of Γ.
Proof
In order to prove the statement, we apply Alexandrov’s reflection technique with horizontal hyperplanes coming down from above. Since M is compact, the slice
H
n
×
{
t
}
, t > h
M
does not intersect M. Then we let t decrease. When t < h
M
, reflect the part above the slice and stop if there is a first contact point between M and its reflection. If we can get to t = 0 without having contact points, then M is a graph over Ω and we can choose r
min < r
int. If this does not happen, there will be a 0 < t
0 < h
M
/2 such that the reflected hypersurface touches M for the first time. If the intersection point lied in the interior of M we would have a contradiction with the Maximum Principle, hence a first touching point belongs to Γ. Let q be one of such points. Then the line {q} × (0, ∞) intersects M exactly once, and {q} × (0, 2t
0) is contained in the interior of W, as t
0 < h
M
/2. Note that the portion of M above
H
n
×
{
t
0
}
is a graph.
We now perform Alexandrov’s reflections with respect to vertical hyperplanes, i.e. the product of a totally geodesic hypersurface of
H
n
and
R
. Let Q be one of such hyperplanes. Since M is compact, we can assume that Q ∩ M =∅. Fix a point x ∈ Q and let γ be the geodesic passing through x and orthogonal to Q. Move Q along γ towards M such that Q is always orthogonal to γ. By abuse of notation, we call again Q any parallel translation of the initial hyperplane. When Q touches M for the first time, keep moving Q and start reflecting through Q the part of M left behind Q. In order not to have a contradiction with the Maximum Principle, we can continue this procedure with no contact points between M and its reflection until Q enters Γ at distance at least r
int from it.
We can avoid the dependence on the contact point q by stopping reflecting when Q is tangent to
C
, where
C
is as follows. Denote by
C
ext
the geodesic sphere in
H
n
×
{
0
}
of radius r
ext
, tangent to Γ at q, and enclosing Γ. Then
C
is the geodesic sphere with the same center as that of
C
ext
and radius equal to r
ext
− r
int.
Define
L
to be the set of the reflections of q through any vertical hyperplane tangent to
C
. It follows that
L
is a hyperbolic limaçon as in Definition 4.1 whose base point is q and whose parameters are a = r
ext
and c = r
ext
− r
int. Since a > c,
L
has two loops. Moreover, since Γ is horoconvex, the smaller loop of
L
sits in Ω.
Furthermore, since
{
q
}
×
R
intersects M in exactly one point, then the same holds true for any p in the compact planar domain bounded by the smaller loop of
L
. Define r
min as the largest radius of a ball bounded by the smaller loop of
L
. Then
M
∩
(
D
(
r
min
)
×
R
)
is a graph. Finally Lemma 4.2 and Lemma 4.3 imply ℓ(r
ext
, r
ext
− r
int) ≤ r
min < r
int at once. We remark that r
min depends only on a and c, namely only on the curvature of Γ, but not on q.□
Proof of Theorem 6.1
We first assume
h
M
<
h
C
r
.
Recall that
R
C
r
=
ρ
+
ϵ
−
ϵ
for r > 1, and
R
C
1
=
ρ
+
. We can then adapt the proof as in Nelli–Pipoli [27] to our case.
Claim I
The hypersurface M lies in
D
(
r
ext
+
R
C
r
)
×
[
0
,
h
C
r
)
.
Proof
Consider the H
r
-hypersurface
C
r
. Its lower boundary is in the slice
H
n
×
{
0
}
and the upper boundary sits in the slice
H
n
×
{
h
C
r
}
. We call
C
r
any horizontal translation or rotation of
C
r
. Since M is compact, we can translate
C
r
horizontally so that
M
∩
C
r
=
∅
and M lies in the part of
C
r
containing the axis of
C
r
. Then we move
C
r
isometrically towards M until
C
r
touches M for the first time (see Figure 9). By the Maximum Principle,
C
r
and M do not touch at any interior point. Since
h
M
<
h
C
r
, the first touching point belongs to Γ. The same steps can be repeated for
C
r
with any horizontal axis. By definition of r
ext
we get that M sits inside
D
(
r
ext
+
R
C
r
)
×
[
0
,
h
C
r
)
.□
Claim II
If Γ is sufficiently small, then M is contained in the cylinder
Ω
×
R
.
Proof
By Lemma 3.1 and our choice of ϵ one has
R
C
r
<
R
S
r
. Recall that
S
r
is the sphere with the same r-th mean curvature as that of M. Cut
S
r
with its horizontal hyperplane of symmetry and let
S
r
+
be the upper hemisphere. Now take Γ small enough so that
R
C
r
+
r
ext
<
R
S
r
. Translate
S
r
+
horizontally in such a way that the intersection of its axis of rotation with the slice
H
n
×
{
0
}
coincides with the center of the disk found in Claim I. Translate upwards
S
r
+
such that
S
r
+
∩
M
=
∅
. By the Maximum Principle, Claim I, and the hypothesis on Γ, we can translate
S
r
+
downwards without having a contact point between
S
r
+
and M until the boundary of
S
r
+
is contained in the slice
H
n
×
{
0
}
, whence M is below
S
r
+
(see Figure 10).
By the Maximum Principle and the fact that
r
ext
<
R
S
r
, one can translate horizontally
S
r
+
without having a contact point with M until
S
r
+
becomes tangent to Γ at any point of Γ, which gives the claim.□
Claim III
The hypersurface M is a graph over Ω, hence it is a disk.
Proof
By Alexandrov’s reflections technique with horizontal hyperplanes coming down from above, it follows that M is a graph over Ω, which proves Theorem 6.1 when
h
M
<
h
C
r
. Observe that δ can be taken as
R
S
r
−
R
C
r
, cf. Claim II.□
We now assume that
h
M
≥
h
C
r
. Alexandrov’s reflection technique with horizontal and vertical hyperplanes guarantees that the part of M above the plane t = h
M
/2 is a graph over a domain of
H
n
×
{
0
}
and that the part of M outside the cylinder
Ω
×
R
is a graph over a domain of
Γ
×
R
. The goal is to prove that M is the union of such graphs, i.e. M ∩ (Ω × (0, h
M
/2]) is empty. In this way it will be clear that M has the topology of a disk (see Figure 11).
Recall the definition of h* in (14) for n > r and (15) for n = r. Hereafter we show that
Ω
×
h
*
,
h
M
/
2
contains no point of M if Γ is small enough, and lastly we prove that there is no interior point of M in Ω × [0, h*] as well.
Before doing this we discuss how the various quantities we use are related to one another. Let d
r
> 0 be such that
ℓ
(
r
ext
,
r
ext
−
r
int
)
≤
ρ
−
≤
r
min
<
r
int
<
r
ext
,
where r
min is the radius defined in Lemma 6.4 and ρ
− is the minimum of the interval where
λ
(
n
−
r
)
/
n
,
d
r
is defined when n > r (see Section 2), and for n = r was chosen in Section 4 to be
d
n
2
/
n
. Note that if r
ext
→ 0, i.e. Γ shrinks to a point, then d
r
→ 0, and so ρ
−, h*, and
ρ
H
r
*
go to zero as well (cf. Lemma 3.3). Hence if r
ext
is small enough, then
h
*
≪
h
M
2
. Further, since ℓ(r
ext, r
ext − r
int) > 0, we can find α > 0 such that
(20)
α
r
ext
<
ℓ
(
r
ext
,
r
ext
−
r
int
)
≤
ρ
−
,
whence
ρ
H
r
*
/
r
ext
>
α
ρ
H
r
*
/
ρ
−
. Taking Γ small enough, by Lemma 3.3 we have
ρ
H
r
*
r
ext
>
α
ρ
H
r
*
ρ
−
>
3
,
therefore we can assume
(21)
ρ
H
r
*
>
3
r
ext
.
Claim IV
The compact domain bounded by
M
∩
H
n
×
h
M
−
h
*
contains a geodesic segment of length at least
ρ
H
r
*
.
Proof
Alexandrov’s technique with respect to horizontal hyperplanes implies that the reflection of points in M at height h
M
across the hyperplane
H
n
×
{
h
M
/
2
}
sits in the closure of Ω. We can assume that one of these points lies on the t-axis after applying a horizontal isometry. Let M′ be the portion of M above the hyperplane
H
n
×
h
M
−
h
*
. Then M′ is a graph with height h*. Suppose that for any p ∈ ∂M′ the distance between p and the t-axis is smaller than
ρ
H
r
*
. Cut
S
r
with a horizontal hyperplane so that the spherical cap
S
r
′
above that hyperplane has height h*. Then translate
S
r
′
up until it has empty intersection with M, then move it downwards. The Maximum Principle implies there is no contact point between
S
r
′
and the interior of M′ at least until the boundary of
S
r
′
reaches the level t = h
M
− h*. Therefore the height of M′ is less than h*, which is a contradiction.□
Claim V
The domain bounded by
M
∩
H
n
×
h
M
−
h
*
contains a disk D(R) with
R
>
ℓ
(
ρ
H
r
*
−
r
ext
,
r
ext
)
.
Proof
Up to horizontal translation, we can assume that one of the endpoints of the geodesic segment found in Claim IV is on the t-axis. Let p be the other endpoint. Consider a geodesic sphere
C
ext
of
H
n
×
{
0
}
tangent to Γ and containing Γ. Reflect the point p across any vertical hyperplane tangent to
C
ext
in
H
n
×
R
.
The set of such reflections is a hyperbolic limaçon
L
in
H
n
×
h
M
−
h
*
with base point p (see Figures 12 and 13). By the choice of p, the parameters of
L
are
a
>
ρ
H
r
*
−
r
ext
and c = r
ext
. By (21), a > c, so
L
has two loops, and the smaller one is contained in W – argue as in Lemma 5.4. The claim now follows by Lemma 4.2.□
Claim VI
The intersection between M and
D
(
R
)
×
h
*
,
h
M
−
h
*
is empty.
Proof
Claim V implies that D(R) is contained in W, and since we have chosen h* ≪ h
M
, the hyperplane
H
n
×
h
M
−
h
*
is above the hyperplane
H
n
×
{
h
M
/
2
}
. By applying the Alexandrov’s reflection technique with horizontal hyperplanes, the reflection of D(R) across
H
n
×
{
τ
}
is contained in W for all
τ
∈
h
M
/
2
,
h
M
−
h
*
. The claim then follows.□
Claim VII
There is no point of M in the cylinder Ω × {0 < t ≤ h*} (see Figure 14).
Proof
If n > r, Σ will denote the portion of the rotational hypersurface generated by the graph of
λ
(
n
−
r
)
/
n
,
d
r
contained in
(
D
(
2
ρ
−
)
\
D
(
ρ
−
)
)
×
R
. For n = r, Σ will denote the portion of a peaked sphere generated by the graph of
λ
H
n
,
d
n
contained in
(
D
(
2
ρ
−
)
\
D
(
ρ
−
)
)
×
R
. Note that if n > r, then the r-th mean curvature of Σ is strictly smaller than that of M, while if n = r the nth mean curvatures of M and Σ coincide.
In both cases Γ and d
r
> 0 are chosen small enough so that the Claims IV, V, and VI hold. For any n ≥ r, Σ has two boundary components C
0 and C
1. Up to vertical translation, we can assume
C
0
⊂
H
n
×
{
0
}
and
C
1
⊂
H
n
×
{
h
*
}
. Up to horizontal translation we can assume that the center of C
0 coincides with the center of the disk of Lemma 6.4. Moreover, by definition of h*, the radius of C
1 is smaller than 2ρ
−.
Let R be the radius found in Claim V. By Claim V, (21) and Lemma 4.3 we get
R
>
ℓ
(
ρ
H
r
*
−
r
ext
,
r
ext
)
>
ℓ
2
ρ
H
r
*
3
,
ρ
H
r
*
3
>
ρ
H
r
*
6
.
By Lemma 3.3, we can take Γ small enough such that
ρ
H
r
*
6
>
1
α
+
1
ρ
−
,
where α is the constant in (20). It follows that if Γ is small enough, then
(22)
R
>
r
ext
+
ρ
−
>
2
ρ
−
.
Claim V and (22) allow us to translate Σ vertically in such a way that it is contained in W. By Lemma 6.4 and the Maximum Principle, we can then translate Σ down until C
0 reaches
H
n
×
{
0
}
without having contact points with the interior of M. Because of ρ
− < r
int, we can translate horizontally Σ in such a way that it touches every point of Γ with C
0 and keeping C
0 inside Ω.
Since (22) holds true, during this translation C
1 remains inside the disk
D
*
(
R
)
⊂
H
n
×
{
h
*
}
, which is the reflection of
D
(
R
)
⊂
H
n
×
h
M
−
h
*
. By Claim VI, in this process, the upper boundary of Σ does not touch M. Recalling that the r-th mean curvature of Σ is not bigger than that of M, by the Maximum Principle, we get that there can be no internal contact point between M and Σ. The claim then follows because Σ is a graph over the exterior of D(ρ
−).□
The proof of Theorem 6.1 is now complete.□
List of notations
We include a summary of the various notations we use throughout for the most notable objects and quantities.
Profile curves:
λ
H
r
,
d
r
: function defining the profile curve of H
r
-hypersurfaces in
H
n
×
R
invariant under rotation depending on a real parameter d
r
(Section 2).
μ
H
r
,
ϵ
: function defining the profile curve of H
r
-hypersurfaces in
H
n
×
R
invariant under hyperbolic translation depending on a real parameter ϵ > 0 (Section 3).
Domain of profile curves:
ρ
−: minimum of the domain of
λ
H
r
,
d
r
when this is not zero.
ρ
+: maximum of the domain of
λ
H
r
,
d
r
.
ρ
0: minimum point of
λ
H
r
,
d
r
in (ρ
−, ρ
+).
ρ
+
ϵ
: maximum of the domain of
μ
H
r
,
ϵ
for r > 1.
Hypersurfaces in
H
n
×
R
:
S
r
: rotation H
r
-hypersurface generated by the graph of
λ
H
r
,
0
, for some H
r
> (n − r)/n.
C
r
,
ϵ
: translation H
r
-hypersurface with H
r
> (n − r)/n generated by the graph of
μ
H
r
,
ϵ
.
Special quantities:
R
S
r
: the value ρ
+ for
λ
H
r
,
0
.
R
C
r
,
ϵ
: the value
ρ
+
ϵ
−
ϵ
for r > 1.
h*: approximated value of
λ
H
r
,
d
r
(
2
ρ
−
)
for d
r
> 0 and H
r
= (n − r)/n (14).
ρ
H
r
*
: radius of the hypersurface given by the graph of
λ
H
r
,
0
, H
r
> (n − r)/n, at height h* (16).
Specific notations for Section 6:
C
r
: same as
C
r
,
ϵ
with a choice of ϵ such that
R
C
r
,
ϵ
<
R
S
r
.
h
C
r
: height of
C
r
, namely 2μ
H
(ρ
+) for r = 1 and
2
μ
H
r
,
ϵ
ρ
+
ϵ
for r > 1, cf. Theorem 3.5.
h
M
: height of
M
⊂
H
n
×
[
0
,
∞
)
with respect to the slice
H
n
×
{
0
}
.
L
: the hyperbolic limaçon as in Definition 5.1.
ℓ(a, c): optimal radius of a ball bounded by the smaller loop of
L
with parameters a > c, see Lemma 5.2 and identity (18) for its explicit definition.
r
int: interior radius of Γ.
r
ext
: exterior radius of Γ.
r
min: the largest radius of a ball bounded by the smaller loop of
L
over which M is a graph, see Lemmas 5.2 and 6.4.
Acknowledgments
The authors would like to thank the anonymous referees for the careful reading and the valuable suggestions.
References
[1] R. Reilly, “Variational properties of functions of the mean curvatures for hypersurfaces in space forms,” J. Differ. Geom., vol. 8, no. 3, pp. 465–477, 1973. https://doi.org/10.4310/jdg/1214431802.Suche in Google Scholar
[2] A. D. Alexandrov, “Uniqueness theorems for surfaces in the large I–V,” Vestnik Leningrad University, vol. 11, no. 19, pp. 5–17, 1956; 12 (1957), no. 7, 15–44; 13 (1958), no. 7, 14–26; 13 (1958), no. 13, 27–34; 13 (1958), no. 19, 5–8; English transl. in Amer. Math. Soc. Transl. 21 (1962), 341–354, 354–388, 389–403, 403–411, 412–416.Suche in Google Scholar
[3] L. J. Alías, J. H. S. de Lira, and J. M. Malacarne, “Constant higher-order mean curvature hypersurfaces in Riemannian spaces,” J. Inst. Math. Jussieu, vol. 5, no. 4, pp. 527–562, 2006. https://doi.org/10.1017/s1474748006000077.Suche in Google Scholar
[4] J. L. M. Barbosa and A. G. Colares, “Stability of hypersurfaces with constant r-mean curvature,” Ann. Glob. Anal. Geom., vol. 15, no. 3, pp. 277–297, 1997.Suche in Google Scholar
[5] L. Caffarelli, L. Nirenberg, and J. Spruck, “Nonlinear second-order elliptic equations. V. The Dirichlet problem for Weingarten hypersurfaces,” Commun. Pure Appl. Math., vol. 41, no. 1, pp. 47–70, 1988. https://doi.org/10.1002/cpa.3160410105.Suche in Google Scholar
[6] J. Hounie and M. L. Leite, “The maximum principle for hypersurfaces with vanishing curvature functions,” J. Differ. Geom., vol. 41, no. 2, pp. 247–258, 1995. https://doi.org/10.4310/jdg/1214456216.Suche in Google Scholar
[7] W. T. Hsiang and W. Y. Hsiang, “On the uniqueness of isoperimetric solutions and imbedded soap bubbles in noncompact symmetric spaces I,” Invent. Math., vol. 98, no. 1, pp. 39–58, 1989. https://doi.org/10.1007/bf01388843.Suche in Google Scholar
[8] M. L. Leite, “Rotational hypersurfaces of space forms with constant scalar curvature,” Manuscripta Math., vol. 67, no. 3, pp. 285–304, 1990. https://doi.org/10.1007/bf02568434.Suche in Google Scholar
[9] H. Mori, “Rotational hypersurfaces in Sn${\mathbb{S}}^{n}$ and Hn${\mathbb{H}}^{n}$ with constant scalar curvature,” Yokohama Math. J., vol. 39, no. 2, pp. 151–162, 1992.Suche in Google Scholar
[10] B. Nelli and H. Rosenberg, “Some remarks on positive scalar and Gauss–Kronecker curvature hypersurfaces of Rn+1${\mathbb{R}}^{n+1}$ and Hn+1${\mathbb{H}}^{n+1}$,” Ann. Inst. Fourier, vol. 47, no. 4, pp. 1209–1218, 1997. https://doi.org/10.5802/aif.1597.Suche in Google Scholar
[11] B. Nelli and B. Semmler, “On hypersurfaces embedded in Euclidean space with positive constant Hr curvature,” Indiana Univ. Math. J., vol. 50, no. 2, pp. 989–1002, 2001.10.1512/iumj.2001.50.1898Suche in Google Scholar
[12] B. Nelli and J. Zhu, “Uniqueness of hypersurfaces of constant higher order mean curvature in hyperbolic space,” Comm. An. Geom. 2024. To be published.Suche in Google Scholar
[13] O. Palmas, “Complete rotation hypersurfaces with Hk constant in space forms,” Bol. Soc. Brasil Mat., vol. 30, no. 2, pp. 139–161, 1999. https://doi.org/10.1007/bf01235866.Suche in Google Scholar
[14] A. Ros, “Compact hypersurfaces with constant scalar curvature and a congruence theorem. With an appendix by Nicholas J. Korevaar,” J. Differ. Geom., vol. 27, no. 2, pp. 215–223, 1988. https://doi.org/10.4310/jdg/1214441779.Suche in Google Scholar
[15] H. Rosenberg, “Hypersurfaces of constant curvature in space forms,” Bull. Sci. Math., vol. 117, no. 2, pp. 211–239, 1993.Suche in Google Scholar
[16] H. Rosenberg and J. Spruck, “On the existence of convex hypersurfaces of constant Gauss curvature in hyperbolic space,” J. Differ. Geom., vol. 40, no. 2, pp. 379–409, 1994. https://doi.org/10.4310/jdg/1214455540.Suche in Google Scholar
[17] X. Cheng and H. Rosenberg, “Embedded positive constant r-mean curvature hypersurfaces in Mm×R${M}^{m}{\times}\mathbb{R}$,” An. Acad. Bras. Cienc., vol. 77, no. 2, pp. 183–199, 2005. https://doi.org/10.1590/s0001-37652005000200001.Suche in Google Scholar
[18] M. F. Elbert and B. Nelli, “On the stability for constant higher order mean curvature hypersurfaces in a Riemannian manifold,” ArXiv, 2019. https://doi.org/10.48550/arXiv.1912.12103.Suche in Google Scholar
[19] M. F. Elbert and B. Nelli, “On the structure of hypersurfaces in Hn×R${\mathbb{H}}^{n}{\times}\mathbb{R}$ with finite strong total curvature,” Bull. London Math. Soc., vol. 51, no. 1, pp. 89–106, 2019. https://doi.org/10.1112/blms.12214.Suche in Google Scholar
[20] M. F. Elbert, B. Nelli, and W. Santos, “Hypersurfaces with Hr+1 = 0 in Hn×R${\mathbb{H}}^{n}{\times}\mathbb{R}$,” Manuscripta Math., vol. 149, nos. 3–4, pp. 507–521, 2016. https://doi.org/10.1007/s00229-015-0794-y.Suche in Google Scholar
[21] M. F. Elbert and R. Sa Earp, “Constructions of hr-hypersurfaces, barriers, and Alexandrov theorem in Hn×R${\mathbb{H}}^{n}{\times}\mathbb{R}$,” Ann. Mat. Pura Appl., vol. 194, no. 6, pp. 1809–1834, 2015. https://doi.org/10.1007/s10231-014-0446-y.Suche in Google Scholar
[22] R. F. de Lima, F. Manfio, and J. P. dos Santos, “Hypersurfaces of constant higher-order mean curvature in M×R$M{\times}\mathbb{R}$,” Ann. Mat. Pura Appl., vol. 201, no. 6, pp. 2979–3028, 2022. https://doi.org/10.1007/s10231-022-01229-3.Suche in Google Scholar
[23] P. Bérard and R. Sa Earp, “Examples of H-hypersurfaces in Hn×R${\mathbb{H}}^{n}{\times}\mathbb{R}$ and geometric applications,” Math. Contemp., vol. 34, pp. 19–51, 2008. https://doi.org/10.21711/231766362008/rmc343.Suche in Google Scholar
[24] F. Fontenele and S. L. Silva, “A tangency principle and applications, Illinois,” J. Math., vol. 45, no. 1, pp. 213–228, 2001. https://doi.org/10.1215/ijm/1258138264.Suche in Google Scholar
[25] A. Ros and H. Rosenberg, “Constant mean curvature surfaces in a half-space of R3${\mathbb{R}}^{3}$ with boundary in the boundary of the half-space,” J. Differ. Geom., vol. 44, no. 4, pp. 807–817, 1996. https://doi.org/10.4310/jdg/1214459410.Suche in Google Scholar
[26] B. Semmler, “The topology of large H-surfaces bounded by a convex curve,” Ann. Sci. Ec. Norm. Sup., vol. 33, no. 3, pp. 345–359, 2000. https://doi.org/10.1016/s0012-9593(00)00114-2.Suche in Google Scholar
[27] B. Nelli and G. Pipoli, “Constant mean curvature hypersurfaces in Hn×R${\mathbb{H}}^{n}{\times}\mathbb{R}$ with small planar boundary,” Rev. Mat. Iberoam., vol. 39, no. 4, pp. 1387–1404, 2023. https://doi.org/10.4171/rmi/1420.Suche in Google Scholar
[28] R. F. de Lima and G. Pipoli, “Translators to higher order mean curvature flows in Rn×R${\mathbb{R}}^{n}{\times}\mathbb{R}$ and Hn×R${\mathbb{H}}^{n}{\times}\mathbb{R}$,” ArXiv, 2022. https://doi.org/10.48550/arXiv.2211.03918.Suche in Google Scholar
[29] J. M. Manzano, “Estimates for constant mean curvature graphs in M×R$M{\times}\mathbb{R}$,” Rev. Mat. Iberoam., vol. 29, no. 4, pp. 1263–1281, 2013. https://doi.org/10.4171/rmi/756.Suche in Google Scholar
 ,
Giuseppe Pipoli
,
Giuseppe Pipoli